配送运输中车辆路径问题研究综述
车辆路径规划问题研究综述

车辆路径规划问题研究综述车辆路径规划问题是指在给定条件下,求解车辆如何合理地选择路径和行驶顺序,以达到某种最优化目标的问题。
在现实生活中,车辆路径规划问题广泛应用于物流配送、公交线路规划、交通流控制等领域,对于提高交通运输效率、减少能源消耗、缓解交通拥堵具有重要意义。
随着信息技术和智能算法的发展,车辆路径规划问题得到了越来越多的关注和研究。
一、车辆路径规划问题的分类车辆路径规划问题可以分为静态车辆路径规划和动态车辆路径规划两大类。
静态车辆路径规划是指在路网、需求、车辆等参数全部给定的情况下,确定车辆的最优路径和行驶顺序。
而动态车辆路径规划则是指在一定时间段内,根据实时交通信息和需求变化,动态地调整车辆的路径和行驶顺序。
静态车辆路径规划问题通常应用于物流配送、固定路线的公交线路规划等场景,而动态车辆路径规划问题更多地应用于交通流控制、共享出行等领域。
二、车辆路径规划问题的方法1. 传统方法在早期,对车辆路径规划问题的研究主要依赖于传统的规划和优化技术,如线性规划、整数规划、动态规划等。
这些方法在一定范围内能够解决一些简单的车辆路径规划问题,但对于复杂的实际问题往往效率不高,无法在合理的时间内给出最优解。
2. 启发式算法随着计算机科学和运筹学的发展,启发式算法逐渐被引入到车辆路径规划问题的研究中。
启发式算法是一类基于经验和规则的算法,能够在有限时间内找到接近最优解的解决方案。
蚁群算法、遗传算法、模拟退火算法等成为应用较多的启发式算法。
这些算法通过模拟自然界的优化过程,使得车辆路径规划问题的解空间得到了更好的搜索,能够有效处理一些中等规模的问题。
3. 智能算法近年来,随着人工智能和深度学习技术的发展,越来越多的研究者尝试将这些技术引入到车辆路径规划问题的研究中。
神经网络、深度强化学习等技术被应用于解决车辆路径规划问题,在一些复杂的场景和大规模问题中取得了较好的效果。
智能算法具有较强的适应性和泛化能力,能够在复杂的实际环境中进行路径规划和决策。
车辆路径规划问题研究综述

车辆路径规划问题研究综述车辆路径规划问题是指在特定条件下,对车辆的路线进行规划,以达到最优或最优化的目标。
它是一种典型的组合优化问题,涉及到多个领域,如计算机科学、数学、人工智能、交通运输、物流管理等。
研究这些问题的主要目的是为了解决一系列实际应用问题,如物流配送、智能交通管理、货车配送等。
本文将从路线规划问题的定义、算法、应用等方面进行综述。
一、定义车辆路径规划问题可以分为两大类:静态路径规划问题和动态路径规划问题。
静态路径规划问题是指在已知起点和终点的情况下,寻找一条最优路线,使得路线具有一定的性质或满足一定的限制条件。
这些限制条件可以是时间限制、路程限制、交通流限制、成本限制等。
常见算法如Dijkstra算法、A*算法、Floyd算法等。
而动态路径规划问题则是指车辆在运行过程中,需要实时调整路线,以适应环境变化或路况变化。
动态规划问题相对于静态规划问题而言,难度更大,需要更加复杂的算法来求解。
常见算法如遗传算法、模拟退火算法、福尔摩斯算法等。
二、算法1.贪心算法贪心算法是一种基于局部最优原则作出选择的策略。
该算法对于寻找单个最优解十分有效,但在寻找多个最优解或全局最优解时,可能会产生局部最优解而不是全局最优解的问题。
2.动态规划算法动态规划算法是一种可解决具有重叠子问题和最优子结构的问题的算法。
它以自底向上、递推的方式求解问题,具有高效、简单的特点。
该算法可以使我们更加深入地理解问题,在计算机视觉、自然语言处理等领域有广泛的应用。
3.遗传算法遗传算法是一种仿生优化算法,通过模拟进化的过程求解最优解。
在车辆路径规划问题中,该算法一般用于实现路线的优化,通过对种群的遗传进化,不断优化路线,达到最优化的目标。
4.强化学习算法强化学习算法是一种在不断试错过程中学习,以最大化预期收益的方法。
在车辆路径规划问题中,该算法可以用于实现车辆的自主控制和智能驾驶,根据环境变化或路况变化,快速做出反应和调整。
车辆路径规划问题研究综述

车辆路径规划问题研究综述车辆路径规划问题是指在给定的道路网络中,找到最佳的路径规划方案,使得车辆能够以最短的时间或最短的距离到达目的地,并且避免拥堵、交通事故等因素的影响。
这个问题在现代交通管理、物流配送等领域中具有重要的应用价值,因此吸引了大量的研究者投入其中。
本文将对车辆路径规划问题的研究现状进行综述,探讨相关的算法、模型以及应用情况,以期为相关领域的研究者提供参考。
一、车辆路径规划问题的分类车辆路径规划问题可以根据不同的约束条件和目标函数进行分类。
根据约束条件的不同,可以将车辆路径规划问题分为静态路径规划问题和动态路径规划问题。
静态路径规划问题是指在起点和终点已知的情况下,通过对道路网络的分析和计算,找到最优的路径规划方案。
而动态路径规划问题则考虑了实时交通信息的影响,需要根据实时的道路状况对路径进行调整,以求得最优的行驶方案。
根据目标函数的不同,车辆路径规划问题可以分为最短路径问题、最小耗费路径问题、最短时间路径问题等。
最短路径问题是寻找两点之间的最短路径,即使得权重和最小的路径。
最小耗费路径问题是在考虑了车辆油耗、路费等因素的基础上,寻找最小耗费的路径。
最短时间路径问题则是在考虑了交通拥堵、限速等因素的基础上,寻找最短时间的路径。
车辆路径规划问题的解决需要借助于一系列的算法,常用的算法包括Dijkstra算法、A*算法、遗传算法、模拟退火算法、禁忌搜索算法等。
Dijkstra算法是一种经典的最短路径算法,通过不断更新起点到各个节点的最短距离来找到最短路径。
A*算法是一种启发式搜索算法,它结合了Dijkstra算法和启发式函数,能够更快的找到最短路径。
遗传算法、模拟退火算法、禁忌搜索算法等是一些元启发式算法,它们通过模拟生物进化、物理退火等过程来搜索最优解,适用于复杂的路径规划问题。
在动态路径规划问题中,常用的算法包括实时A*算法、实时Dijkstra算法、实时禁忌搜索算法等。
这些算法能够结合实时的交通信息,动态调整路径规划方案,以应对复杂的交通环境。
配送运输中车辆路径问题研究综述
䝽䘱䘀䗃ѝⲴ䖖䖶䐟 䰞仈⹄ウ㔬䘠㾱˖䝽䘱䘀䗃ѝⲴ䖖䖶䐟 䰞仈аⴤ 䘀ㆩ 亶 Ⲵ⹄ウ✝⛩ѻаDŽ Ҿ䖖䖶䐟 䰞仈Ⲵ ⭘㛼 ˈ 㓣 㔃Ҷ ㊫䰞仈 ≲䀓㇇⌅Ⲵ⹄ウ䘋 ˈ 䎻 ˈѪ 䢤DŽ䭞䇽˖⢙⍱䝽䘱˗䖖䖶䐟 䰞仈˗䙊⭘ ㇇⌅˗㔬䘠DŽThe Current Situation and Development Trends on Vehicle Routing Problems of distribution managementAbstract: Vehicle routing problem is one of the attractive research area in the circles of operations research. In this paper, on the basis of introducing briefly the application background, the research classified the vehicle routing problem, analyzed and summarized the progress of different type of problems and solution algorithms. Furthermore, the research progress of the problems is also discussed. It is expected to provide inference for relevant research work.Key words: distribution management; vehicle routing problem; heuristics; overview.䀶䲿⵰㓿⍾Ⲵ 、 Ⲵ䘋↕ˈ⢙⍱ӗъ䗵䙏 ˈ Ѫ ≁㓿⍾ Ⲵ 㜹 ӗъˈ ≤ 㺑䟿ањ ⧠ԓ 〻 㔬 Ⲵ䟽㾱 ḷDŽкц㓚80 ԓԕ ˈ ⢙⍱ӗъⲴ ˈ⢙⍱ъ Ѫањ⤜・Ⲵӗъ䗵䙏 䎧DŽ❦㘼ˈ ⢙⍱ъӽ Ҿ 㓗䱦⇥ˈо 䗮 ∄䘈 а Ⲵ 䐍ˈ ѝ ケ Ⲵ䰞仈 ⢙⍱ 䖳儈DŽ 㔏䇑[1]ˈ ⢙⍱ 䍩⭘Ѫ7.1зӯ ˈ GDPⲴ∄䟽Ѫ17.8%ˈ㘼 㖾 ㅹ 䗮 ⢙⍱ 㓖 GDPⲴ10%ˈ丙 ㅹѝㅹ 䗮 Ⲵ∄䟽㓖Ѫ15%DŽ䗷儈Ⲵ⢙⍱ Ѫ 㓖 ≁㓿⍾ Ⲵ䟽㾱 ㍐DŽ ↔ˈ 儈⢙⍱ъⲴ、 ㇑⨶≤ ǃ䱽վ⢙⍱ ӏ䴰䀓 Ⲵ 䭞 䰞仈DŽ䘀䗃 ⢙⍱ Ⲵ䟽㾱㓴 䜘 DŽ 䘀䗃 ⢙⍱ 䍩⭘Ⲵ∄ 䖳儈ˈ㓖Ѫ50%[1]DŽ䱽վ䘀䗃 ˈ 儈䘀䗃 ⦷ǃ 䘋⢙⍱ъ 㔝 Ⲵ䟽㾱䙄 DŽѪ⢙⍱䝽䘱ѝⲴ 䭞а⧟ˈ䖖䖶䐟 䰞仈˄Vehicle Routing Problem, VRP˅ 䘀䗃㓴㓷Ո ⲴṨ 䰞仈ѻаDŽ㠚1959 Dantzig Ramser[2]俆⅑ ԕ ˈVRP Ѫ䘀ㆩ 㓴 Ո 亶 Ⲵ ⋯о⹄ウ✝⛩ѻаDŽ⧠ ⭏ӗѝˈ䛞 䘀䗃ǃ 䖖 ⊭䖖䈳 ㅹ䈨 䰞仈䜭 ԕ 䊑ѪVRPDŽ ↔ˈ VRPⲴ␡ ⹄ウˈ ⵰䟽㾱Ⲵ、 ѹ 〻 ⭘ԧ DŽ 㓣 㔃ҶVRP Ⲵ⹄ウ䘋 ˈ ҶVRPⲴ 䎻 ˈѪ 㓿傼 䐟DŽ1. 䖜䖼䐥 䰤从Ⲻ 䘦Ր㔏кˈ 䖖䖶䐟 䰞仈Ⲵа㡜 䘠Ѫ[3, 4]˖ а㌫ 㔉 Ⲵ ˄䘱䍗⛩ 䍗⛩˅ˈ⺞ 䘲 Ⲵ䝽䘱䖖䖶㹼傦䐟㓯ˈ Ӿ䝽䘱ѝ ˈ ⅑ 䇯䰞 њ ⛩ˈ 䘄 䝽䘱ѝ ˈ ┑䏣а Ⲵ㓖 Ԧл˄ 䖖䖶䖭䍗䟿ǃ 䴰≲䟿ǃ 䰤デ䲀 ㅹ˅ˈ 䘀䗃 ˄ ⭘䖖䖶 ǃ䖖䖶㹼傦䐟〻 䰤˅䗮 DŽ 1 ⽪ˈ ѝⲴ Ṷ㺘⽪䖖䖶 ⛩˄ 䖖 䝽䘱ѝ ˅ˈ ⛩㺘⽪䴰㾱䇯䰞Ⲵ ⛩ˈ㓯⇥㺘⽪є⛩ѻ䰤Ⲵ䘎 䐟⇥ˈ ѝ⇿ 㓯⇥ ⵰ањ䍩⭘˄ 䐍 㹼傦 䰤˅DŽ1 䖜䖼䐥 䰤从⽰Fig.1 Schematic figure of VRPⲴ䖖䖶䐟 䰞仈ѫ㾱 ԕлṨ 㾱㍐[5]˖䚃䐟㖁㔌˄Road Network˅ǃ ˄Customer˅ǃ䝽䘱ѝ ˄䖖 ˅˄Distribution Center, Depot˅ǃ䖖䖶˄Vehicle˅ǃ傮傦 ˄Driver˅ǃ䲀 Ԧǃ㹼傦䍩⭘ 㹼傦 䰤ˈԕ Ո ⴞḷ˄Objective˅DŽ њ㾱㍐Ⲵ⢩ 㿱㺘1DŽ㺞1 䖜䖼䐥 䰤从Ⲻ㓺 㾷㍖Tab. 1 Key elements of VRP㓴 㾱㍐⢩䚃䐟㖁㔌1. VRPⲴṨ 㾱㍐ѻа˗2. 䙊 ⭡ 㢲⛩ 㓴 Ⲵ䍻 㺘⽪DŽ 㺘⽪䐟⇥ˈ⛩㺘⽪䚃䐟Ӕ ⛩ǃ䝽䘱ѝ ˗3. ṩ 䐟㖁㚄є⛩䰤Ⲵ䚃䐟⢩ ˈ Ⲵ Ѫ ˗ 䍻Ҹ⇿ 䶎䍏Ⲵ䍩⭘ 䟽ˈ є⛩䰤Ⲵ䘀㹼䐍ˈ䘀㹼 䰤ㅹDŽ1. VRPѝ䖖䖶 Ⲵ 䊑ˈ Ҿ㖁㔌 ѝⲴ ⛩˗2. ⛩Ⲵ ㊫ ˖䘱䍗 ˄Delivery˅ǃ 䍗 ˄Pickup˅ є㘵˗3. ⛩Ⲵ 䴰≲䟿˖а⅑┑䏣ˈ ˄Split˅;4. ⛩Ⲵ 䰤˖䖖䖶 ӔԈ 䍗⢙ 㣡䍩Ⲵ 䰤˗5. ⛩Ⲵ 䰤デ˖ 㾱≲ Ⲵ 䰤 䲀ˈ Ѫ⺜ 䰤デ[6]䖟 䰤デ[7]˗6. ⛩ Ⲵ ⅑ ˖ Ո 㓗˗ ㊫ 亪ˈ 䘱䍗 䍗˗7. ⛩Ⲵ ㌫˖ ḀӋ лˈ ⛩Ⲵ䝽 ㌫ˈ Ӿањ 䍗❦ 䘱 оѻ䝽 Ⲵ⢩ 䘱䍗 ⛩DŽ䝽䘱ѝ 1. ⇿ 䖖䖶䐟㓯Ⲵ䎧⛩ 㓸⛩ˈ Ҿ㖁㔌 ѝⲴ ⛩˗2. 䖖 䟿˖ањ䖖 њ䖖 ˗3. 䖖䖶 䘄 䖖 ˖ VRP[5, 8]ˈ䰝 VRP˗4. 䖖 䰤デ˖ḀӋ лˈ䖖 䲀 ⢩↺㾱≲˄ Ⲵ 䰤 䰤˅˗5. 䖖 ѻ䰤Ⲵ ㌫˖ḀӋ лˈ䖖 䰤 䝽 ㌫ˈ Ӿањ䖖 䛓䟼 Ⲵ䖖䖶 享 оѻ䝽 Ⲵ Ⲵ䖖 DŽ䖖䖶1. 䖖䖶 㠚 䘈 』ˈ ԫ 䘄 ˗2. 䖖䖶㊫ ˖ VRPѝ 䇮䖖䖶Ѫ а㊫ ˈն 䱵䝽䘱㇑⨶ѝˈ䖖䱏 ⭡ н 㻵䖭㜭 ǃн ԕ Ⲵ 䖖䖶㓴 ˗3. 䖖䖶Ⲵ㻵䖭㜭 ˖䖖䖶 Ⲵ䖭䟽䟿 Ⲵ㻵䖭 䟿ㅹ˗4. 䖖䖶 ˖䖖䖶Ⲵ ˈ 䖖䖶䍝㖞䍩⭘ㅹ˗ ⭘ ս 䟼Ⲵ䍩⭘ ս 䰤Ⲵ䍩⭘ 㺑䟿˗5. 䖖䖶Ⲵ 㔝 ˄Duration˅˖䖖䖶 Ⲵ 䇨㹼傦䐍 䰤DŽ傮傦 1. 㔉傮傦 䘱䍗ԫ ˈ 享ㅖ 䰤Ⲵ 㿴 DŽ 傮傦 䲀 Ԧа㡜䜭 Ⲵ䖖䖶䲀 ԦѝDŽ䲀 Ԧ1. 䖖䖶Ⲵ 䍏䖭н㜭䎵䗷䖖䖶Ⲵ㻵䖭㜭 ˗2. 㾱≲䘱䍗ǃ 䍗ǃ 䘱䍗 ˗3. 㾱≲Ⲵ 䰤デ 傮傦 Ⲵ 䰤 ˗4. 䇯䰞 Ⲵ亪 㾱≲DŽ㹼傦䍩⭘㹼傦 䰤1. ⛩о ⛩ѻ䰤ǃ䝽䘱ѝ о ⛩ѻ䰤Ⲵ㹼傦䐍 㹼傦 䰤DŽՈ ⴞḷ1. 䘀䗃 ˈ Ҿ 䴰Ⲵ䖖䖶 ˄ 㓯䐟 ˅ǃ 㹼傦䐍˄ 䰤˅˗2. о Ⲵн ㅹ Ⲵ 㖊 ˗3. 㺑 㓯䐟кⲴ㹼傦 䰤 䖖䖶䖭䟽䟿DŽ2. 䖜䖼䐥 䰤从Ⲻ ㊱䙊䗷 к䘠VRPṨ 㾱㍐䱴 н Ⲵ⢩ 䘲 Ⲵ ˈ 㹽⭏ ⿽н Ⲵ䖖䖶䐟 䰞仈㊫ DŽ ⹄ウ[5, 9, 10]ˈ 㿱ⲴVRP ㊫ 㹽⭏㊫ DŽ VRP㊫ 㻵䖭㜭 ⲴVRPǃ 䐟〻䮯 ⲴVRPǃ 䰤デⲴVRPǃ 〻䘀䗃ⲴVRPˈԕ 䘱䍗ⲴVRP˗ ⁑ Ⲵ кˈ㔃 н Ⲵ㓖 Ԧˈ ҶVRPⲴ㹽⭏㊫ ˈ 䲿 VRPǃ⁑㋺VRPǃ VRPㅹDŽ њ㊫ Ⲵ⢩ 㿱㺘2DŽ㺞2 䖜䖼䐥 䰤从Ⲻ㊱Tab. 2 Types of VRP ㊫ ⢩㻵䖭㜭 ⲴVRP˄Capacitated VRP, CVRP˅1. VRPѝ Ⲵ ˗2. 䜭 Ҿ㾱䘱䍗Ⲵ 㾱 䍗Ⲵˈ 䴰≲䟿 ⸕ˈфн ˗3. 䖖䖶 ㊫ ф䜭 ањ䝽䘱ѝ ˗4. 䖖䖶 㻵䖭㜭 Ⲵ䲀 ˗5. Ո ⴞḷ Ⲵ 䍩⭘ DŽ䐟〻䮯 ⲴVRP˄Distance-Constrained andCapacitated VRP, DCVRP˅1. 䖖䖶㻵䖭㜭 䲀 ˈ 䐟〻䮯 䲀 DŽ䰤デⲴVRP˄VRP with time windows, VRPTW˅1. 䲔Ҷ䖖䖶㻵䖭㜭 Ⲵ㓖 ˈ⇿њ 䜭 ањоѻ㚄㌫Ⲵ㾱≲ Ⲵ 䰤 䰤˗2. Ѫ⺜ 䰤デVRP 䖟 䰤デVRPDŽ⺜ 䰤デ ⇿亩ԫ 享 㾱≲Ⲵ 䰤 ˈ䖟 䰤デ Ḁ亩ԫ н㜭 㾱≲Ⲵ 䰤㤳 ˈ 㔉Ҹа Ⲵ 㖊[11]DŽ〻䘀䗃ⲴVRP˄VRP with backhauls, VRPB˅1. 䳶㻛 2њ 䳶˖㾱≲䘱 а 䟿䍗⢙Ⲵ 〻 ԕ 㾱≲ а 䟿䍗⢙䘀 䝽䘱ѝ Ⲵ 〻 ˗2. 〻 〻 Ⲵ䴰≲ ⸕ф ˗3. 〻 享 Ҿ 〻 DŽ䘱䍗ⲴVRP˄VRP with pickup and delivery˅1. 䖖䖶нӵ 䘱䍗 ˈҏ Ⲵ䍗⢙˗2. ⇿њ ⛩ˈ㿴 㻵DŽ㹽⭏㊫VRP[5]˄Open VRP, OVRP˅1.н㾱≲䖖䖶 ԫ 䘄 ⛩ˈ 㤕㾱≲䘄 ⛩ˈ ⋯ 〻䐟㓯䘄 DŽ䖖 VRP˄Multiple Depots VRP, MDVRP˅1. њ䝽䘱ѝ ˈ䖖䖶 ԕӾԫօањ䝽䘱ѝ ⍮ ˈ ԫ ˈ䖖䖶ҏ ԕ䘄 ԫօањ䝽䘱ѝ ˗2. 䰞仈 Ѫ DŽ䙊 䇮Ḁњ䖖 Ⲵ䖖䖶ӽ䴰䘄 䈕䖖 ˈ≲䀓 ˈ ➗Ḁ⿽㇇⌅ 䝽㔉Ḁњ䖖 ˈ❦ ➗ а䖖 VRP䘋㹼≲䀓[12]DŽ䖖 VRP[13]˄Heterogeneous Fleet VRP,HVRP˅1. 䖖䖶Ⲵ н ˈ䙊 䖖䖶Ⲵ䖭䟽䟿на㠤DŽ䴰≲ ⲴVRP[14]˄VRPwith Split Deliveries˅1. Ⲵ䴰≲ ԕ 㻛 њ䖖䖶 DŽ䲿 VRP˄Stochastic Vehicle Routing Problem, SVRP˅1. Ѫ䲿 VRPǃ䲿 䴰≲VRPǃ䲿 㹼傦 䰤VRP˗2. 䲿 VRP ⢙⍱亶 㓿 ⧠˗3. Ҿ䲿 䴰≲VRPˈ⺞ Ⲵ ⸕ˈն Ⲵ ⺞䴰≲䟿 ⸕ˈ ⟳⋩䝽䘱䰞仈˗4. Ҿ䲿 㹼傦 䰤VRPˈ⹄ウ䖳 ˈ㘼 䲿 㖁㔌 ⸝䐟 䰞仈Ⲵ⹄ウ䖳␡ [15, 16]DŽ⁑㋺VRP˄Fuzzy VRP, FVRP˅1. ḀӋ ˄ 䴰≲ǃ䐍ǃ 䰤デ[3]˅ ⌅ ⺞ 䘠˗2. ⁑㋺ᾲ ⁑ ㇇⌅ 䀓 ↔㊫䰞仈DŽVRP˄Periodic VRP, PVRP˅1. VRPⲴ ˈVRP⹄ウⲴ 䖖䖶Ⲵ ˈ㘼PVRP 䖖䖶Ⲵањ Ⲵ ˈ ањ ˈ⇿њ ┑䏣䴰≲Ⲵ лˈ 㻛 а⅑DŽ䶎 〠㖁㔌VRP˄Asymmetric network VRP, AVRP˅1. ⧠ ѝˈ⭡Ҿ 㹼䚃 ⾱→ 䖜ㅹӔ䙊㇑ ˈ є 䘄Ⲵ䐍 䰤 нㅹ˗2. ⴞ Ⲵ≲䀓㇇⌅䜭 Ҿ䶎 〠TSP䰞仈Ⲵ㇇⌅[17]DŽVRP˄Dynamic VRP, DVRP˅1. 䖖䖶 ˈ䈳 н⺞ 䜘 н⺞ ˗ 䖖䖶 ˈ ⧠ Ⲵ䈳 ˗2. ѹкˈ䲿 VRPˈ⁑㋺VRPˈԕ 㖁㔌VRP䜭 ҾDVRPDŽ↔ ˈ䘈 ԕ 䰤デ㓖 о Ԇ㓖 Ԧ㔃 ˈ 䰤デ㓖 Ⲵ 䘱 ъVRPˈ 䰤デ㓖 Ⲵ 〻䘀䗃VRPㅹDŽ3. 䖜䖼䐥 䰤从Ⲻ≸䀙㇍⌋VRP ⭼ 䇔ⲴNP䳮䰞仈[18]DŽVRP㻛 ˈ ≲䀓㇇⌅Ⲵ 䙐аⴤ ⹄ウⲴ䟽⛩ 䳮⛩DŽⴞ ⿽≲䀓VRPⲴ㇇⌅ˈ 䍘к Ѫ㋮⺞㇇⌅ ㇇⌅є ㊫DŽ㋮⺞㇇⌅ Ҿ ѹ 䇱 ˈ ≲ Ո䀓Ⲵ㇇⌅DŽⴞ ⭘Ҿ≲䀓VRP ԓ㺘 Ⲵ㋮⺞㇇⌅ѫ㾱 ⭼䲀⌅[19]˄Branch and Bound Approach˅ǃ 䶒⌅[20]˄Cutting Planes Approach˅ǃ㖁㔌⍱㇇⌅˄Network Flow Approach˅[21] 㿴 ⌅˄Dynamic Programming Approach˅[22]DŽ⭡ҾVRP NP-䳮䰞仈ˈ Ⲵ㋮⺞㇇⌅Ⲵ䇑㇇䟿а㡜䲿⵰䰞仈㿴⁑Ⲵ 䮯˗ф ⛩䎵䗷50 ˈ㋮⺞㇇⌅ на ≲ 䰞仈Ⲵ Ո䀓[23]DŽ ˈ ⭘䰞仈⢩ ѝㅹ䇑㇇ 䰤 㧧 VRPⲴ⅑Ո䀓 ┑ 䀓Ⲵ ㇇⌅ Ѫ 㘵Ԝ⹄ウⲴ䟽⛩DŽ ㇇⌅ Ѫ㓿 ㇇⌅˄Classical Heuristics˅ 䙊⭘ ㇇⌅˄Metaheuristics˅DŽ3.1 㔅 ㇍⌋˄1˅㢲㓖㇇⌅˄Saving Methods˅⭡Clark WrightҾ1964 俆⅑ [24]ˈ а⿽ Ҿ㢲㓖 Ⲵ䖖䖶䐟㓯䙀↕ 䙐㇇⌅DŽ Ѫ˖ ⇿њ䝽䘱⛩ Ѫа 㓯䐟ˈ 䜘㓯䐟 Ⲵ䳶 Ѫ 䀓DŽ ањ⛩о ањ⛩䘎 а Ⲵ㓯䐟ˈ Ⲵ㓯䐟㜭┑䏣㓖 Ԧˈ 㹼Ⲵˈ Ⲵ㢲㓖 ˄ 䟼〻ǃ䰤ㅹ˅ ѹѪ䘎 䘉є 㓯䐟Ⲵ㢲㓖 DŽӾ 㓯䐟ѝ䘹 㢲㓖 Ⲵ䗩䘋㹼а⅑㓯䐟 ˈ н 㹼ˈ㇇⌅㔃 DŽ䈕㇇⌅ ԕ ┑ 䀓ˈնна 㜭 䇱 Ո䀓DŽ Ո⛩ ⨶ㆰ ф ⧠ˈⴞ Ѫ VRP ㇇⌅ѝӗ⭏ 䀓Ⲵ㇇⌅DŽ䈕㇇⌅ ԕ ˈ 㘵 䘋㇇⌅䘋㹼Ҷ⹄ウˈԕ ≲䀓Ⲵ䍘䟿ˈѫ㾱 ԕл2⿽䙄 ˖а 䙊䗷 Ⲵ 㔃 ㆆ⮕ ⨶㢲㓖 [25, 26]˗Ҽ Ҿ 䝽㇇⌅˄Matching Algorithm˅Ո 䈕㇇⌅ѝⲴ䐟㓯 䗷〻[27, 28]DŽ˄2˅ ㇇⌅˄Sweep Algorithm˅⭡Gillett MillerҾ1974 [29]ˈ ҾĀ 㓴 㓯䐟āⲴ㇇⌅DŽ 䉃Ā 㓴ā ⍮㔉⇿䖶䖖а㓴䝽䘱⛩DŽа⿽ㆰ Ⲵ 㓴 ⌅ ԕ䝽䘱ѝ Ѫ ⛩ˈ ḷ 䶒 Ѫ њ ˈ ↕Ѫ⇿њ Ⲵ⛩ ⍮а䖶䖖DŽ 䉃Ā㓯䐟ā ⇿њ ˈ 䟷⭘ ⌅䘹 䝽⛩ˈ❦ 䟷⭘ ㇇⌅ 㓯䐟DŽ 䘋㹼Ҷа⅑Ā 㓴о㓯䐟āⲴ䐟㓯 䙐 ˈ䘈 䝽⛩ˈ 㔗㔝䘋 Ā 㓴о䐟㓯ā〻 DŽ ↔ ˈⴤ Ⲵ⛩ 䝽 ∅Ѫ→DŽⲴ ㇇⌅а⅑ 㜭ӗ⭏а 䐟㓯ˈ Ѫ ㇇⌅Ⲵ ˈаӋ 㘵⹄ウҶа⅑⭏ 㤕 㹼䖖䖶䐟㓯Ⲵ ⌅ˈ❦ 䙊䗷≲䀓ањ䳶 䰞仈 ⺞ ՈⲴ㓴 ˈ∄䖳 Ⲵ 1-㣡⬓㇇⌅[30, 31] 2-㣡⬓㇇⌅[32]DŽ䴰㾱 Ⲵ ˈ ㇇⌅ 䘲 Ҿ 䶒㔃 ˄Plannar Structure˅ⲴVRPˈ Ҿ䛓Ӌ ḵṬ㺇䚃 ⲴVRPˈ䈕㇇⌅ н䘲⭘DŽ˄3˅䛫 ㇇⌅˄Nearest-Neighbor˅䈕㇇⌅ а⿽ 䙐 䐟㓯⌅ˈ Ӿа ањ䝽䘱⛩Ⲵ㓯䐟 (䙊 䐍䝽䘱ѝ 䘁Ⲵ⛩)ˈӾ 䘹 ⛩ѝㆋ䘹 ⛩ˈ Ӿ ⛩ѝ䘹 ањ⛩ Ѫ 㓯䐟Ⲵ㓸⛩ˈ 㓯䐟Ⲵ DŽԕ↔ 㓯䐟н 䘋㹼 ˈⴤ 㓯䐟⋑ ⛩Ѫ→DŽ ⛩ 䘹 ˈ ㇇⌅㔃 ˗ ˈ ⭏ а Ⲵ 㓯䐟ˈ䟽 䶒Ⲵ㓯䐟 䗷〻ˈⴤ㠣 ⛩䜭 䘹 DŽ˄4˅ ㇇⌅䈕㇇⌅㔃 㢲㓖㇇⌅о䛫 ㇇⌅Ⲵ ˈ 䝽䘱⛩㓣 䐟 ѝԕ 䝽䘱㓯䐟DŽ 〻 о䛫 ㇇⌅լˈ Ӿ 㓯䐟 ˈ 䙐 㓯䐟ˈ ⋑ 㹼 а 㓯䐟DŽ䈕㇇⌅Ⲵ 䭞 䘹 䘲Ⲵ 䝽⛩ 㓯䐟Ⲵ ս㖞䘋㹼 DŽ˄5˅є䱦⇥㇇⌅˄Two-phase Process˅VRPє䱦⇥ ㇇⌅⹄ウѝˈ ԓ㺘 ⲴѪChristofidesㅹӪ[33]ԕ Fisher Jaikumar[34] Ⲵ㇇⌅DŽChistofidesㅹ Ⲵє䱦⇥㇇⌅ѝˈ єњ䱦⇥˖ 䐟㓯 䙐䱦⇥ԕ 㹼䐟㓯 䙐䱦⇥ˈ 䍘 㜭≲䀓ḷ VRPDŽFisher Jaikumarㅹ俆 䙊䗷≲䀓ањ ѹ ⍮䰞仈˄Generalized Assignment ProblemˈGAP˅ ⺞ 㹼Ⲵ亮 ⛩ 㓴ˈ❦ ҾTSP㇇⌅ ⺞ ⇿њ 㓴 Ⲵ䖖䖶䐟㓯DŽGAP ањNP䳮䰞仈ˈ䙊 䙊䗷 Ṭ ㇇⌅ ≲䀓DŽFisher Jaikumar 䲿 Ⲵ⹄ウѝ 㔉 Ҷ亮 ⛩䘹 Ⲵ ⌅ Ṭ ⌅[35, 36]DŽ❦㘼ˈ䈕 ⌅ 䲀 ˖а 䶒ˈ㇇⌅н 㕆〻ˈ 䇑㇇䙏 ⿽ 亮 䘹 ԕ Ṭ 䗷〻 䖳 ˗ а 䶒ˈ㤕䟷⭘Fisher Jaikumar Ⲵ⿽ 亮 ㆋ䘹 ⌅ Ṭ ⌅ˈ ㇇⌅Ⲵ 䖳 ˈа㡜 䳮䗮 㘵 㔉 Ⲵ䇑㇇㔃 [32]DŽ Fisher Jaikumar⹄ウⲴ кˈBramel Simchi-Levi[37]䙊䗷≲䀓ањ㜭 㓖 䘹 䰞仈 ⺞ ⿽ 亮 ⛩ˈՈ ҶFisher Jaikumar ⿽ 亮 ⛩䘹 ⌅ˈն 㘵 㔉 Ҷ 㜭 㓖 VRPк䶒⍻䈅Ⲵ㔃 DŽ ԕⴻ ˈ 䜘 㓿 ㇇⌅ 1960 -1990 䰤 ⲴDŽ 䱵 ⭘ѝˈ ḷ 䀓 䙐 ⌅ 䀓 䘋 ⌅䜭 Ҿ㓿 ㇇⌅DŽа 䶒ˈ 㜭 䀓オ䰤ѝ䘋㹼 䲀 ㍒ˈ 䖳⸝Ⲵ 䰤 ≲ ┑ 䀓˗ а 䶒ˈ䘉㊫㇇⌅㜭 䖳Ѫ ˈԕ 䱵 ⭘ѝ ⻠ Ⲵ䈨 㓖 Ԧˈ ↔ ъ䖟Ԧ ѝ㻛 ⌋ ⭘DŽⴞ ˈ 㓿 ㇇⌅亶 ˈ Ѿ 䘋㹼䟽 䘋Ⲵ DŽ3.2 䙐⭞ ㇍⌋㠚20ц㓚90 ԓˈ䙊䗷⁑ 㠚❦⧠䊑 䗷〻ˈ䇨 㘵 ҶаӋ≲䀓VRPⲴ䙊⭘ ㇇⌅ˈѪ≲䀓 㿴⁑Ⲵ 䝽䘱䰞仈 Ҷ Ⲵ 䐟DŽ䈕㊫ ⌅ 亶 ㍒ ǃ䇠 㔃 ǃԕ 䀓Ⲵ䟽㓴㔃 䎧 ˈ 䈳 オ䰤䘋㹼 ㍒ˈ⢩ Ⲵ 䘋㹼㓥␡䈅 ˈ䘉ṧ 㜭 Ո䀓䳶ѝ ㍒ˈ 㜭 䐣 䜘 ㍒亶 ˈӾ㘼 䇱Ҷ⿽㗔Ⲵ ṧ ˈ䚯 䲧 䜘 Ոˈ 儈Ҷ Ո䀓Ⲵᾲ⦷DŽ䘁 ˈ䙊⭘ ㇇⌅ 䖳 ˈ ⁑ 䘰⚛㇇⌅ǃ⾱ ㍒㇇⌅ǃ䚇Ր㇇⌅ǃ㲱㗔㇇⌅ǃ㋂ 㗔㇇⌅ǃ⾎㓿㖁㔌ǃ ㇇⌅ㅹ䜭 ⭘ ≲䀓VRPDŽ 㢲 ԓ㺘 Ⲵ䙊⭘ ㇇⌅䘋㹼㔬䘠DŽ˄1˅⁑ 䘰⚛㇇⌅˄Simulated Annealing, SA˅1982 ˈKirkpatrickfㅹ փ䘰⚛ 㓴 Ո 亶 ˈ Ҷа⿽≲䀓 㿴⁑VRPⲴ 䘁լ㇇⌅ˈ ⁑ 䘰⚛㇇⌅˄SA˅DŽSAⓀҾ փ䘰⚛䗷〻Ⲵ⁑ ˈ 䍘к а⿽䲿 Ⲵ ㍒ ⌅DŽ ѝˈSA䟷⭘Metropolis ˈ ⭘а㓴〠ѻѪ 䘋 㺘Ⲵ ㇇⌅䘋〻ˈ ㇇⌅ 亩 䰤䟼㔉 ањ䘁լ Ո䀓DŽо㓿 ㇇⌅∄ˈSA 䘠ㆰǃ ⭘⚥⍫ǃ ⭘ ⌋ 䖳 Ԧ䲀 ㅹՈ⛩ˈⴞ 䇨 Ո 䰞仈ѝ ⭘DŽⴞ ҾSAⲴ⹄ウˈ 㔃 ԆՈ ㆆ⮕ ⌅DŽ Tian[38]ㅹӪ 䙐Ҷа⿽ Ҿ Ո ㆆ⮕ⲴSA㇇⌅ ≲䀓VRPˈ ⭘ ㇇⌅ 䙐 䀓ˈ SAо2-opt㔃 ˈ ㇇⌅ѝ ⭘ 䟽 ˈ 䗮 㓸 ˈṩ Ո Ⲵ 䟽 ㊫ ㇇⌅DŽLi[39]ㅹӪ SAо⾱ ㍒㇇⌅㔃 ˈ ⭘TS㇇⌅ѝⲴ〫ս Ӕ ㇇ 㓯䐟 㓯䐟䰤Ⲵ ˈ㘼 SA Ѫ 〻 ˈṩ Ⲵ Ո䀓 䇮 Ⲵ ˈ ㇇⌅䘋㹼 ㍒DŽTavakkoli-Moghaddam[40]ㅹӪ 䛫䘁㇇⌅оSA㔃 ˈԕ⭘ ≲䀓 䖖 VRP 䴰≲ Ⲵ 䖖 VRPDŽ㜑 Տ[41]ㅹ 䲿 䙐VRP 䀓Ⲵ кˈ㔃 ⁑ 䘰⚛㇇⌅ㆆ⮕ˈ䟷⭘䐟 䰤䈳 䐟 Ո ⌅ˈ 䙏 VRP䘋㹼Ҷ≲䀓DŽ⭡ҾSAⲴ 䙏 䖳 ˈфо Ԇ㇇⌅∄ˈSA н㜭 Ⲵ䀓[42]ˈ ↔ⴞ SA VRPѝⲴ ⭘⋑ ⾱ ㍒㇇⌅ 䚇Ր㇇⌅ ⌋DŽ˄2˅⾱ ㍒㇇⌅˄Tabu Search, TS˅1986 Glover Ҷ⾱ ㍒㇇⌅˄TS˅[43]DŽ Ҿ Ӫ㊫ 〻Ⲵа⿽⁑ ˈTS 䜘亶 ㍒Ⲵа⿽ ˈ а⿽ 䙀↕ Ո㇇⌅ˈ ˖㔉 ањ 䀓˄ 䀓˅ 䘹䀓ӗ⭏ ˄亶 㔃 ˅ˈ 䀓Ⲵ亶 ѝ⺞ 㤕 䘹䀓˗㤕 䘹䀓 Ⲵⴞḷ ՈҾ ⴞ Ѫ→ ㍒ Ⲵ³ 䀓´˄Best-so-for˅ˈ 㿶 ⾱ ⢩ ˈ⭘ ԓ 䀓 ³ 䀓´˗㤕н к䘠 䘹䀓ˈ 䘹䀓䳶ѝ䘹 䶎⾱ Ⲵ 䘹䀓Ѫ Ⲵ 䀓ˈ㘼 㿶 о 䀓ⲴՈ ˗к䘠є⿽ л䜭 Ⲵ 䊑 ⾱ 㺘ˈ ⾱ 㺘ѝ 䊑Ⲵԫ ˗ ↔䟽 к䘠䘝ԓ ㍒䗷〻ˈⴤ㠣┑䏣㓸→ DŽ ԕⴻ ˈ亶 㔃 ǃ 䘹䀓䳶ǃ⾱ 䊑ǃ㰀㿶 ǃ㓸→ ㅹ䜭 TS 㜭Ⲵ 䭞DŽˈWillard[44], Pureza Franca[45] TS ⭘ҾVRPˈն䜭 㜭≲ 䖳 Ⲵ㔃 DŽ Osman WassanⲴTS㇇⌅ѝ[46]ˈ ⭘є⿽ 䀓ӗ⭏ ⌅˖ањ 㢲㓖㇇⌅о ⌅㔃 ˈ ањ 㢲㓖㇇⌅о ⍮⌅㔃 ˗ 䛫 㔃 ањє 䐟 䰤Ⲵ њ 㘵єњ䘎㔝Ⲵ ⛩ⲴӔ ˗ ⾱ 䮯 ⭡ањ 〻 ㍒ 䰤䘋㹼 ѹDŽ⍻䈅㔃 ⽪ˈ䘉є⿽TS ⧠ 䜭 Ҷ䖳 Ⲵ㔃 DŽ1994 ˈGendreau[47] Ҷ㓿 ⲴTaburoute㇇⌅ˈ 亶 㔃 ањ亦⛩Ӿ Ⲵ㓯䐟ѝ ˈ а 㓯䐟ѝˈ㘼䘉 㓯䐟 ⭘ԆԜ Ⲵ≲䀓TSPⲴ ѹ ⌅˄GENI˅ ӗ⭏Ⲵpњ 䛫䘁䀓ѻа˗ Ҿ⾱ ˈ Ӿ 䰤[5, 10]ѝ䲿 ањ ˗ ⭘Ҷа⿽ ṧ ㆆ⮕ˈѪ 㘳㲁䛓Ӌ〫 䖳 Ⲵ亦⛩Ⲵ 㜭 ˈ 䛓Ӌ㓿 㻛〫 Ⲵ亦⛩䘋㹼 㖊˗ ⭘՚䎧⛩ˈ⭏ њ䀓 ⇿ањ䜭䘋㹼 䲀Ⲵ ㍒ˈ❦ 䘹 ѝ 㘵Ѫѫ ㍒䗷〻Ⲵ 䀓˗⍻䈅㔃 㺘 ˈ䈕㇇⌅㜭≲ 儈䍘䟿Ⲵ㔃 ˈф ≲ ⴞ Ѫ→Ⲵ 䀓DŽ1995 ˈRochat Taillard[48] Ҷ㠚䘲 䇠 ˄Adaptive Memory˅ᾲ ˈ 䘁 TS亶 ⧠Ⲵ Ⲵ䘋 ѻаDŽ ㍒䗷〻ѝ ⲴՈ䍘䀓 䎧 ˈ❦ 䙊䗷䘉Ӌ䀓Ⲵ㓴 ˈӗ⭏TSⲴ 䀓DŽањ㠚䘲 䇠 а㓴 њ ㍒䗷〻ѝн Ⲵ 䀓DŽ䘉Ӌ䀓ⲴḀӋ ㍐㻛 ˈ 䘋㹼н Ⲵ㓴 ԕӗ⭏ Ⲵ 䀓DŽ VRPѝˈӾ њ䀓ѝ 䘹 Ⲵ䖖䖶㓯䐟 㻛⭘ Ѫањ䎧⛩DŽ䘉њ ⌅ 㓿 ԆԜ 14њḷ VRP⍻䈅䰞仈ѝˈ≲ Ҷєњ ⴞ Ѫ→Ⲵ 䀓DŽ1998 ˈToth Vigo[49] Ҷа⿽ ⌋䘲⭘㤳 Ⲵㆋ㖁⾱ ㍒˄Granular Tabu Search, GTS˅DŽGTSⲴѫ㾱 ⓀҾ˖ањ ѝ䖳䮯Ⲵ䗩㻛 ањ Ո䀓ѝⲴ 㜭 DŽ ↔ˈ䙊䗷⎸ 䮯 䎵䗷ањ䟿 ˄Granularity˅Ⲵ Ⲵ䗩ˈ аӋ⋑ 䙄Ⲵ䀓 ㍒䗷〻ѝ н 㘳㲁DŽ㔃 㺘 ˈ GTS㜭 ⸝Ⲵ 䰤 ≲ Ⲵ䀓DŽ䘁 ˈBrandao[50] 䇮䇑ⲴTSѝˈ䛫 㔃 䘹䀓䳶 ⭡ ˈ ⭘Ҷй⿽〫 ˈ 䐟 䰤 ⛩ ǃ䐟 䰤 ⛩Ӕ ǃ䐟 ⛩Ӕ DŽ⾱ 䮯 ⭡[N/6ˈN/2]ѻ䰤Ⲵ䲿 ˈ ⭘ Ⲵ[N/3] Ѫ⾱ 䮯 䘋㹼 傼⭘ԕ ∄DŽBrandao Eglese[51]䇮䇑Ⲵ≲䀓 䐟 Ⲵ⾱ ㍒㇇⌅ѝˈԕ5⿽ ⌅㧧 䀓ˈ 䘹 ԧ䗩ǃ䘹 䍥䗩ǃ ǃ䘎 䗩 亦⛩(Connected Components)ǃ䐟 (Path Scanning)˗ 䛫 㔃 䗩 ǃ 䗩 є 䐟 кⲴ䗩Ӕ DŽ⭡ҾTS㇇⌅ 䀓 Ⲵ 䎆 ˈ 㘵ԕSolomon ⌅ Ѫ ㇇⌅ˈҏ 䟷⭘ ⌅ǃл ㇇⌅ǃK-tree㇇⌅ӗ⭏ 䀓DŽⴞ ˈTS 䖖VRPǃ 〻䖭䍗VRPǃ 䰤デ㓖 ⲴVRPǃԕ VRP䜭 䟿 ⭘DŽ˄3˅䚇Ր㇇⌅˄Genetic Algorithms, GA˅1975 ˈHolland[52] Ҷ䚇Ր㇇⌅˄GA˅DŽGA а⿽⁑ԯ⭏⢙䘋 䗷〻Ⲵ 䲿 ㍒ ⌅ˈ Ѫ˖ӾՈ 䰞仈Ⲵањ⿽㗔˄а㓴 㹼䀓˅ ˈ ➗䘲㘵⭏ Ո㜌 ⊠Ⲵ ⨶ˈ䙀ԓ˄Generation˅╄ ӗ⭏ 䎺 䎺 Ⲵањ⿽㗔˄а㓴 㹼䀓˅˗ ⇿аԓˈṩ њփ˄ 㹼䀓˅Ⲵ䘲 ˄ⴞḷ ˅ⲴՈ 䘹а䜘 Ո㢟њփ ˄㑱⇆˅ лаԓˈ 䘋㹼Ӕ ˈӗ⭏ ԓ㺘 Ⲵ䀓䳶 Ⲵ⿽㗔DŽ䘉њ䗷〻 㠤⿽㗔 㠚❦䘋 аṧⲴ ԓ⿽㗔∄⡦ԓ 䘲 Ҿ⧟ ˄ 㹼䀓∄ 㹼䀓 䘁䰞仈Ⲵ Ո䀓˅ˈ њ䘋 䗷〻ѝⲴ Ոњփ Ѫ䰞仈Ⲵ 㓸䀓DŽҾн ㊫ Ⲵ䰞仈ˈ օ䇮䇑а⿽ 㖾Ⲵ㕆⸱ Ṹаⴤ GAⲴ ⭘䳮⛩ѻаˈҏ GAⲴањ䟽㾱⹄ウ DŽҼ䘋 㕆⸱ ⌅ GAѝ ⭘Ⲵа⿽㕆⸱ ⌅ˈ❦㘼ˈ Ҿ≲䀓VRP䘉ṧⲴ 䰞仈 ˈҼ㓗 㕆⸱ а Ⲵ㕪䲧DŽ ↔ˈㅖ 㕆⸱ ⌅ ⌋䇔 DŽն ㅖ 㕆⸱ ⌅ ˈ 㔉GA Ҷ Ⲵ䰞仈ˈ㤕䟷 ㆰ Ӕ Պ ԓ㓯䐟ѝ Ӌ亦⛩䟽 ˈ аӋ亦⛩㻛䚇┿ˈ 㠤 㜭 䙽 亦⛩Ⲵ䶎⌅㓯䐟DŽ ↔ˈ 享 у䰘Ⲵ Ҿ亪 ⲴӔ ӗ⭏ Ⲵ ԓ DŽ䘁 㓿 Ҷ л ⌅[5]˖䜘 䝽Ӕ ⌅˄Partially Matched Crossover, PMX˅ǃ亪 Ӕ ⌅˄Order Crossover, OX˅ǃ ⧟Ӕ ⌅˄Cycle Crossover, CX˅ˈԕ 䗩䟽㓴Ӕ ⌅˄Edge Recombination Crossover, ERC˅DŽ Ҿ ˈҏ 㓿 ҶаӋу䰘Ⲵ ⌅ˈ ˄Remove and Reinsert˅ǃ ˄Swap˅ˈԕ 䘶䖜 ˄Inversion˅DŽⴞ ˈ≲䀓VRP OVRPⲴGA ⥞ 䖳 ˈ㘼≲䀓 䰤デⲴVRP ㅹ ⲴGA ⥞ 䖳 DŽ Ⲵ䲀 Ԧˈ⢩ 䰤デⲴ ˈаⴤ ⢥ ⵰ Ⲵ≲䀓 ⌅Ⲵ DŽ䘉㔉GA⭘ Ԉ 䲀 Ԧ 䶒Ⲵ ≲ ㄎҹ Ⲵ㔃 Ҷ ՊDŽ˄4˅㲱㗔㇇⌅˄Ant Colony Optimization, ACO˅㲱㗔㇇⌅ ⭡Dorigo, M., ㅹ[53]Ҿ1991 俆⅑ ⲴDŽACO 㠚❦⭼ѝⵏ 㲱㗔㿵伏㹼ѪⲴ 㘼 Ⲵа⿽⁑ 䘋 ㇇⌅DŽ 伏⢙ ˈ㲲㲱Պ 㓿䗷Ⲵ䐟 䙊䗷 а⿽ ◰㍐˄pheromoneˈ ㇇⌅ѝ〠Ѫ ㍐˅ ḷ䇠ˈ Ⲵ䟿 ṩ 䐟 䮯 伏⢙Ⲵㅹ㓗 DŽ䘉Ӌ ◰㍐Ѫ 㲲㲱 ˈ Ԝ 䘀伏⢙DŽⴞ ˈACO ⭘Ҿ ㊫VRPDŽBullnheimerㅹ[54]䪸 VRP䇮䇑Ҷу䰘Ⲵ㲱㗔䖜〫䘹 ㆆ⮕ˈ 㲱㗔 ㍒ ˈ ⭘2-OptՈ 䐟 ˗Gambardellaㅹ[55] ACO⭘Ҿ≲䀓VRPTWˈ 㘵䟷⭘єњ⿽㗔 Ո 䰞仈ˈањՈ 䖖䖶 ⴞˈањՈ 㓯䐟䮯 ˗Donatiㅹ[56] ACO⭘Ҿ 㖁㔌VRPˈ ㇇⌅ѝ ㍐ ѹѪањ 䰤 䎆䟿ˈ а 〻 к䀓 Ҷ 䰤デⲴ 㖁㔌VRP˗Montemanniㅹ[57]⹄ウҶACO 䖖䖶䐟 䰞仈Ⲵ ⭘ˈ Ҷањ⭡һԦ㇑⨶ǃ㲱㗔㇇⌅ǃ ㍐ ㆆ⮕3њ ㍐㓴 Ⲵ㌫㔏Ṷ ˗Pellegrini ㅹ[58]⹄ウҶн 䖖䖶ǃ 䖖 ǃ 䰤デㅹ㓖 ⲴVRPˈ ⭘2⿽ ⿽ACOՈ ≲䀓˗Gajpal Abad[59]ԕ㋮㤡㲲㲱 䐟 ㆆ⮕Ⲵ㲱㗔㌫㔏≲䀓Ҷ 䘱 ъⲴVRP˗Ugur Aydin[60] ҾACO ҶањӪ ӔӂTSP ⁑ 䖟ԦDŽ˄5˅ ㇇⌅а䙊⭘ ㇇⌅⹄ウ␡ Ⲵ ˈ⹄ウӪ 㓿䖳 ⿽ аⲴ ㇇⌅㔃 䎧 ˈԕ 儈VRPⲴ≲䀓䙏 䀓Ⲵ䍘䟿DŽ1995 ˈGloverㅹ[61] 䈅 GA TS㔃 ˗䛾㤲⾕ 㜑 㔗[62]䙊䗷 䜘 ㍒㜭 Ⲵ⡜ ㇇⌅о ㍒㜭 Ⲵ䚇Ր㇇⌅㔃 ˈ 䙐Ҷ≲䀓⢙⍱䝽䘱䐟 Ո 䰞仈Ⲵ 䚇Ր㇇⌅ˈ 㢟 Ո㔃 ˗䛡 ẵ[63]ˈ[64] ⹄ウҶ㋂ 㗔㇇⌅о Ԇ㇇⌅Ⲵ㔃 VRP 䰞仈кⲴ ⭘˗б⿻䴧[65]ㅹ ⚮ ㇇ 㲱㗔㇇⌅ 䲧 䜘Ո Ⲵ㕪䲧˗Saez[66]ㅹ 䚇Ր㇇⌅о⁑㋺㚊㊫㔃 ˈ ↔ к Ҷа⿽ 㜭䘲 亴 ⌅≲䀓 䖖䖶 䘱 ъVRPDŽ㔬к 䘠ˈ ≲䀓VRPⲴ ⿽䙊⭘ ㇇⌅ ㇇⌅Ⲵ⹄ウ㺘 ˈ Ҿ Ⲯњ Ⲵ ˈ䘉Ӌ ⌅ѝ䜭 ԕ≲ 䶎 Ⲵǃ ⭊㠣 ՈⲴ䀓ˈ㲭❦䘀㇇ 䰤㾱䮯аӋDŽ փ 䈤ˈ ⴞ Ѫ→ˈ⾱ ㍒ ⧠ Ⲵ ⌅˗ Ҿ䚇Ր㇇⌅ ⾎㓿㖁㔌Ⲵ ⌅ 㜭Ո㢟˗㘼 Ҿ⁑ 䘰⚛ 㲱㗔㌫㔏Ⲵ ⌅ㄎҹ н DŽ❦㘼ˈ㘳㲁 ⿽ ⌅ 䙀⅑ ⧠ѝⲴ 㜭 䘋 ˈ ⿽ ㇇⌅ 䳶ѝ ㍒ ṧ ㍒ǃ ㇇⌅≲䀓䍘䟿 䇑㇇ 䰤ѻ䰤㜭㧧 䖳 Ⲵ 㺑ˈ Ⲵ㲱㗔㌫㔏 䚇Ր㇇⌅ 㻛 ˈ о⾱ ㍒㇇⌅ 㖾DŽ4. 㔉 䈣䖖䖶䐟 䰞仈 ㇑⨶ 䘀ㆩ 亶 䱄Ⲵ ⭘ԧ ⹄ウ DŽ䲿⵰⽮ՊⲴ ˈVRPҏ н Ⲵ ˈ 䲿 䴰≲VRPǃ䶎 〠㖁㔌VRPǃԃ -䝽䘱аփ 䐟 䰞仈ㅹ 䘋а↕⹄ウⲴ DŽ 㓣 㔃ҶVRP Ⲵ⹄ウ䘋 䎻 ˈѪ Ⲵ 䢤DŽ㘳 ⥞[1] 䶙 , 㔏䇑 , ѝ ⢙⍱о䟷䍝㚄 Պ. 2010 ⢙⍱䘀㹼 䙊 [M]. ѝ ⢙⍱о䟷䍝㚄 Պ, ѝ ⢙⍱ 䢤2011, Ӝ: ѝ ⢙䍴 ⡸⽮, 2011: 61-62[2] Dantzig, G.B., and Ramser, J.H., The truck dispatching problem [J].Management Science, 1959, 6: 80[3] ⇥仾 . 䖟 䰤デ㓖 Ⲵ 䖖䖶䐟 䰞仈⹄ウ ⭘[D]. 䮯⋉: ѝ , 2009[4] █・ . 䰤デ䖖䖶䐟 䰞仈 ㇇⌅⹄ウ[D]. 䮯⋉: ѝ , 2012[5] ㅖ . 䖖䖶䐟 䰞仈 ⭘⹄ウ[D]. 䮯⋉: ѝ , 2004[6] █・ , ㅖ . ≲䀓 ⺜ 䰤デ䖖䖶䐟 䰞仈Ⲵ ㇇⌅[J]. 䇑㇇ ⭘, 2012, 32(11): 3042-3043, 3070[7] 㛆䳱, ㅖ , 㛢 . 䖟 䰤デⲴ䖖䖶䐟 䰞仈 ⭘ 䇘[C]. 䮯⋉: ѝ 䘀ㆩ ՊㅜӔ⍱Պ, 2000: 634-638[8] ㅖ , 㙲䶆. 䖖䖶䐟 䰞仈 㤕 ⹄ウ䘋 [C]. ␡ : ѝ 䘀ㆩ Պㅜ Ӕ⍱Պ, 2006:395-400[9] Bodin, L.B., Golden, B.L., Assad, A.A., Ball, M.O., Routing and scheduling of vehicles and crews: the state ofthe art [J]. Computer Operation Research, 1983, 10: 163-211[10] Toth, P., Vigo, D. The Vehicle Routing Problem [M]. Society for Industrial and Applied Mathematics,Philadelphia, USA, 2002[11] 㛆 䖹. 䖖䖶䐟 Ո ⥞㔬䘠[J]. ь 㤳 䲒 ˄㠚❦、 ˅, 2010, 2: 31-37[12] Crevier, B., Cordeau, J.F., LaPorte, G., The multi-depot vehicle routing problem with inter-depot routes [J].European Journal of Operational Research, 2007, 176(2): 756-773[13] Golden, B., Assad, A., Levy, L., The fleet size and mix vehicle routing problem [J]. Computer and OperationsResearch, 11(1): 49-66[14] Drorand, M., Trudeau, P. Split delivery routing [J]. Naval Research Logistics, 1990, 37: 383-402[15] 䉒⿹. 䲿 䖖䖶䐟 䰞仈⹄ウ[D]. 䜭: 㾯 Ӕ䙊 , 2003[16] Bent, R.W., and Hentenryck, P.V., Scenario-Based Planning for Partially Dynamic Vehicle Routing withStochastic Customers [J]. Operations Research, 2004, 52(6): 977-987[17] Oppen, J., L okketangen, A., Arc routing in a node routing environment [J]. Computers and OperationsResearch, 2006, 33(4): 1033-1055[18] Lenstra, J.K., and Rinnooy, K., Complexity of vehicle routing and scheduling problem [J]. Network, 1981, 11:221-227[19] . Ҿ ⭼䲀⌅Ⲵ 㹼 ㍒㇇⌅⹄ウ[D]. 㾯 : 㾯 ⭥ 、 , 2011[20] Տ. а⿽ Ҿ䀓 ѝ 䶒Ⲵ ㊫㇇⌅[D]. 䘎: 䘎⨶ , 2009[21] . CVRP 䝽㖁㔌⍱㇇⌅[D]. ⍾ : ь、 , 2003[22] 㕚 㣜, 䛥 . 㿴 ㇇⌅Ⲵ ⨶ ⭘[J]. ѝ 、 , 2005(21): 42-42[23] Golden, B.L., Wasil, E.A., Kelly, J.P., and Chao, I.M., Meatheuristics in vehicle routing [C]. In Crainic, T.G.,and Laporte, G. editors, Fleet Management and Logistics, Kluwer Academic Publishers, London, 1998, 33-56 [24] Clark, G. and Wright, J.R., Scheduling of vehicle routing problem from a central depot to a number ofdelivery points [J]. Operations Research, 1964, 12: 568-581[25] Nelson, M.D., Nygard, K.E., Griffin, J.H., and Shreve, W.E., Implementation techniques for the vehiclerouting problem [J]. Computer and Operations Research, 1985, 12(3): 273-283[26] Paessens, H., The savings algorithm for the vehicle routing problem [J]. European Journal of OperationalResearch, 1988, 34(3): 336-344[27] Altinkemer K., Gavish B., Parallel savings based heuristic for the delivery Problem [J]. Operations Research,1991, 39: 456-469[28] Wark, P., and Holt, J., A repeated matching heuristic for the vehicle routing problem [J]. Journal ofOperational Research Society, 1994, 45: 1156-1167[29] Gillett, B.E., and Miller, L.R., A heuristic algorithm for the vehicle dispatch problem [J]. Operations Research,1974, 22: 340-349[30] Foster, B., and Ryan, D., An integer Programming approach to the vehicle scheduling problem [J]. OperationResearch, 1976, 27: 307-384[31] Ryan, D.M., Hjorring, C., and Glover, F. Extension of the Petal method for vehicle routing [J]. Journal ofOperational Research Society, 1993, 44: 289-296[32] Cordeau, J.F., Gendreau, M., Laporte, G., Potvin, J.Y., and Semet, F., A guide to vehicle routing heuristics [J].Journal of Operational Research Society, 2002, 53(5): 512-522[33] Christofides, N., Mingozzi, A., and Toth, P., The vehicle routing problem [C]. Combinatorial optimization,Chichester, UK: Wiley, 1979: 315-338[34] Fisher, M.L., Jaikumar, R., A generalized assignment heuristic for vehicle routing [J]. Network, 1981, 11:109-124[35] Fisher, M.L., Greenfield, A.J., Jaikumar, R., and Lester, J., A computerized vehicle routing application [J].Interfaces, 1982, 12(4): 42-52[36] Fisher, M.L., Jaikumar, R., and Wassenbove, L.N., Multiplier adjustment method for the generalizedassignment problem [J]. Management Science, 1986, 32: 1095-1103[37] Bramel, J.B., and Simchi-Levi, D., A location based heuristic for general routing problems [J]. OperationsResearch, 1995, 43(4): 649-660[38] Tian, P., Ma, J., and Zhang, D.M., Application of the simulated annealing algorithm to the combinatorialoptimization problem with permutation property: an investigation of generation mechanism [J].European Journal of Operational Research, 1999, 118(1): 81-94[39] Li, H., Lim, A., Huang, J., Local search with annealing-like restarts to solve VRPTW [J]. European Journal ofOperational Research, 2003, 150(1): 115-127[40] Tavakkoli-Moghaddam , R. Safaei, N., Gholipour, Y., A hybrid simulated annealing for capacitated vehiclerouting problems with the independent route length [J]. Applied Mathematics and Computation, 2006, 176(2): 445-454[41] 㜑 Տ, , 㜑 . 䖖䖶䐟 䰞仈Ⲵ⁑ 䘰⚛㇇⌅[J]. ѝ 䐟 , 2006, 19(4): 123-126[42] Breedam, A.V., Improvement heuristics for the vehicle routing problem based on simulated annealing [J].European Journal of Operation Research, 1995, 86(3): 480-490[43] Glover, F. Future paths for integer programming and links to artificial Intelligence [J]. Computers andOperations Research, 1986, 13:533-549[44] Willard, J.A.G., Vehicle routing using r-optimal tabu search [M]. London: The Imperial College, 1989[45] Pureza, V.M., and Franca, P.M., Vehicle routing problems via tabu search metaheuristic [R].Technical ReportCRT-347, Centre for Research on Transportation, Montreal, Canada, 1991[46] OsmanˈI., and Wassan, N., A reactive tabu search metaheuristic for the vehicle routing problem with back-hauls [J]. Journal of Scheduling, 2002, 5(4): 263-285[47] Gendreau, M., Hertz, A., L aporte, G., A tabu search heuristic for the vehicle routing problem [J].Management Science, 1994, 40: 1276-1290[48] Rochat, Y., and Taillard, E.D., Probabilistic diversification and intensification in local search for vehiclerouting [J].Journal of Heuristics, 1995, 1: 147-167[49] Toth, P., and Vigo, D., The granular tabu search and its application to the vehicle routing problem[R].Technical Report OR19819, DEIS, Italy, 1998[50] Brandao, J., A new tabu search algorithm for the vehicle routing problem with backhauls [J]. EuropeanJournal of Operation Research, 2006, 173(2): 540-555[51] Brandao, J., and Eglese, R., A deterministic tabu search algorithm for the capacitated arc routing problem [J].Computers and Operations Research, 2008, 35(4): 1112-1126[52] Holland, J., Adaptation in natural and artificial systems [D]. University of Michigan Wesley, 1975[53] Colorni, A., Dorigo, M., Maniezzo, V., Distributed optimization by ant colonies [J]. In: Proc of the FirstEuropean Conference of Artificial Life. Paris, France Elsevier Publishing, 1991: 134-142[54] Bullnheimer, B., Hartl, R.F., and Strauss, C., Applying ant system algorithm to the vehicle routing problem[A]. Advances and Trends in Local Search Paradigms for Optimizaiton [C], Kluwer Acedenics, 1998: 109-120[55] Gambardella, L.M., Taillard, E., Agazzi, G., MACS-VROTW: a multiple ant colony system for vehiclerouting problems with time window [A]. New ides in optimization [C], London, U.K.: McGraw-Hill, 1999: 63-76[56] Donati, A.V., Montemanni, R., Casagrande, N., Rizzoll, A.E., and Gambardella, L.M., Time dependentvehicle routing problem with a multi ant colony system [R]. Technical Report TR-17-03, IDSIA, Galleria2, Manno, 6928, Switzerland, 2003[57] Montemanni, R., Gambardella, L.M., Rizzoll, A.E., and Donati, A.V., A new algorithm for a dynamic vehiclerouting problem based on ant colony system [R]. Technical Report TR-23-02, IDSIA, Galleria2, Manno, 6928, Switzerland, 2004[58] Pellegrini, P., Favaretto, D., Moretti, E., Multiple ant colony optimization for a rich vehicle routing problem:a case study [J]. Lecture Notes in Computer Science, 2007, 4639: 627-634[59] Gajpal, Y., and Abad, P.L., Multi-ant colony system (MACS) for a vehicle routing problem with backhauls[J]. European Journal of Operation Research, 2009, 196: 102-117[60] Ugur, A., and Aydin, D., An interactive simulation and analysis software for solving TSP using ant colonyoptimization algorithms [J]. Advances in Engineering Software, 2004, 40: 341-349[61] Glover, F., Kelly, J.P., and L aguna, M., Genetic algorithms and tabu search: hybrids for optimization [J].Computers Operation and Research, 1995, 22(1): 111-134[62] 䛾㤲⾕, 㜑 㔗. ⭘ 䚇Ր㇇⌅≲䀓⢙⍱䝽䘱䐟 Ո 䰞仈Ⲵ⹄ウ[J]. ѝ ㇑⨶、 , 2002, 10(5): 51-56[63] 䛡 , ẵ. Ҿ 䘋㋂ 㗔㇇⌅Ⲵ ս-䘀䗃䐟㓯䰞仈⹄ウ[J].ѝ Ỡ 〻, 2006, 17(22):2359-2361[64] . 䖖䖶䐟 䰞仈Ⲵ㋂ 㗔㇇⌅⹄ウо ⭘[D]. ⎉⊏: ⎉⊏ ъ , 2007[65] б⿻䴧, 㜑⾕ , ≨ . ≲䀓 䰤デⲴ䖖䖶䐟 䰞仈Ⲵ 㲱㗔㇇⌅[J]. ㌫㔏 〻⨶䇪о 䐥, 2007,10: 98-104[66] Saez, D., Cortes, C.E., and Nunez, A., Hybrid adaptive predictive control for the multi-vehicle dynamic pick-up and delivery problem based on genetic algorithms and fuzzy clustering. Computers and Operations Research, 2008, 35: 3412-3438。
车辆路径规划问题研究综述
车辆路径规划问题研究综述车辆路径规划问题是指在给定的网络中,确定车辆的路径和顺序,以最大化效率和减少成本。
该问题在很多领域都有应用,例如物流配送、交通管理和智能交通系统等。
在这篇文章中,我们将对车辆路径规划问题进行综述,包括问题的定义、解决方法和应用领域。
一、车辆路径规划问题的定义车辆路径规划问题是指在给定的网络中,确定一组车辆的路径和顺序,以最小化某种成本函数。
该问题通常包括以下几个要素:1.网络结构:表示车辆可以到达的位置和它们之间的连接关系。
通常用图论中的图来表示,节点表示位置,边表示路径。
2.车辆集合:表示可用的车辆,每辆车有一定的容量和最大行驶距离。
3.配送任务:表示需要在不同位置之间运输的货物,每个任务有一定的需求量。
问题的目标是找到一组车辆的路径和顺序,使得满足配送任务的需求,并且最小化成本函数,通常可以是总行驶距离、总时间或者总成本。
车辆路径规划问题是一个典型的组合优化问题,具有复杂的计算结构和多样的解决方法。
目前,主要的解决方法包括启发式算法、精确算法和元启发式算法。
1.启发式算法:如遗传算法、模拟退火算法、禁忌搜索等,这些算法能够在较短的时间内找到较好的解,但不能保证找到最优解。
2.精确算法:如分枝定界法、整数规划法等,这些算法能够保证找到最优解,但通常需要较长的计算时间。
3.元启发式算法:如粒子群算法、蚁群算法、人工鱼群算法等,这些算法结合了启发式算法和精确算法的优点,能够在较短的时间内找到较好的解,并且具有一定的全局搜索能力。
车辆路径规划问题在许多领域都有着重要的应用价值,其中包括物流配送、交通管理和智能交通系统等。
1.物流配送:在快递、邮政、零售等行业中,车辆路径规划可以帮助优化配送路径,减少行驶距离和时间,从而提高效率和降低成本。
2.交通管理:在城市交通管理中,车辆路径规划可以帮助优化交通信号配时、减少交通拥堵,提高道路通行效率。
3.智能交通系统:在智能交通系统中,车辆路径规划可以帮助导航系统优化路线规划,避开拥堵路段,提供更加智能的交通导航服务。
车辆路径问题的算法综述
车辆路径问题的算法综述作者:***来源:《甘肃科技纵横》2020年第08期摘要:物流与国民经济及生活的诸多领域密切相关,在物流成本方面,运输费用占大约50%,比重最大。
因此,物流成了企业创造利润的重要途径。
要降低配送成本,缩短并优化车辆路径是关键所在。
然而,车辆路径问题(vRP)是物流领域中的一个强NP问题,国内外学者近年来不断提出多种车辆路径优化问题及求解方法以解决愈加复杂的问题。
为进一步理清国内外研究现状,就VRP进行总结分析,然后对车辆路径求解方法进行了介绍,特别地对元启发式算法进行了较为详细的综述。
关键词:VRP;元启发式算法;文献综述中图分类号:U116.2 文献标志码:A0引言随着电子商务的快速发展,物流业作为连接生产者与消费者的桥梁,发挥着越来越重要的作用。
然而,物流在给人们生活带来极大便利的同时,也给相关企业带来了逐年增高的物流费用。
伴随着竞争日益白热化的商业环境,降低物流成本成了物流企业存活和发展所必须重视的环节。
在降低物流成本方面,最关键的途径之一是解决车辆路径问题(vehicle routing prob-lem,VRP)。
1VRP综述车辆路径问题于1959年由丹齐格和拉姆泽提出,最早源于旅行商问题(TsP)的研究。
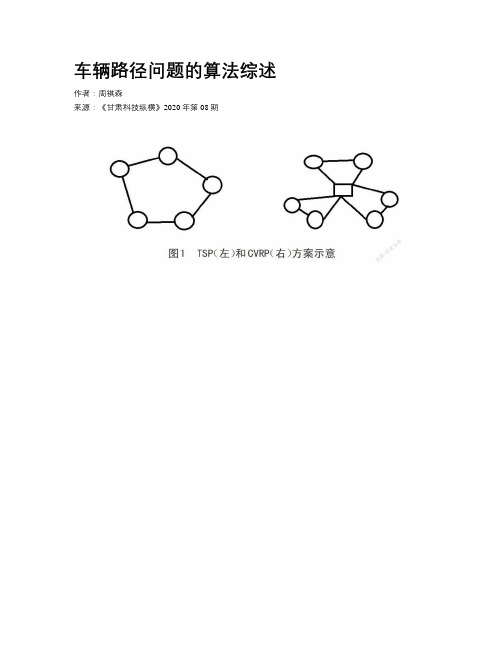
TsP可以简单理解为在给定的m个城市里,从一个城市出发,经过每个城市,并且每个城市只经过一次,最后回到出发点,找出最短回程路径问题。
在TsP的研究基础上,出现了能力约束车辆路径问题(CVRP),CVRP相对于TsP的“一对多”,可以理解为“多对多”,如图1所示。
2VRP元启发式算法综述基于车辆路径模型,其求解算法基本可分为精确式算法、启发式算法、元启发式算法和机器学习算法,如图2所示。
2.1遗传算法遗传算法是由J.Holland教授在1975年首先提出,它借鉴了生物进化论中的遗传、杂交、变异以及自然选择等现象,利用计算机模拟生物进化的过程,根据优胜劣汰、适者生存的自然法则规定搜索方向,以此迭代,最终获得具有最大适应度个体,该个体就作为最优解输出。
深度强化学习求解车辆路径问题的研究综述
深度强化学习求解车辆路径问题的研究综述摘要:车辆路径问题是指在给定起点和终点的情况下,寻找最优路径的问题。
传统的车辆路径问题求解方法存在着计算复杂度高、解空间大、求解精度不高等问题。
随着人工智能的快速发展,深度强化学习作为一种强大的求解方法,被广泛应用于解决车辆路径问题。
本文通过综述相关文献和研究成果,分析深度强化学习在车辆路径问题上的应用,并对其研究方向进行展望。
1. 引言车辆路径问题是指在给定起点和终点的情况下,寻找最优路径的问题。
传统的车辆路径问题通常采用启发式搜索方法,如A*算法、遗传算法等。
然而,这些方法存在着计算复杂度高、解空间大、求解精度不高等问题。
近年来,深度强化学习的快速发展使得人们可以通过训练智能体来求解车辆路径问题,取得了许多突破性的进展。
2. 深度强化学习在车辆路径问题上的应用深度强化学习通过将驾驶车辆的行为建模为一个马尔可夫决策过程,并通过长期反馈奖励来训练智能体。
该方法克服了传统方法中解空间大的问题,可以在海量的路径选择中找到最优解。
研究者通过结合深度神经网络和强化学习算法,设计了一系列有效的模型和算法来解决车辆路径问题。
2.1 基于Q-learning的车辆路径规划Q-learning是一种经典的强化学习算法,通过学习一个Q值函数来指导决策。
研究者通过将车辆路径问题转化为一个离散状态的决策问题,并使用Q-learning算法进行训练,取得了良好的效果。
然而,由于车辆路径问题的状态空间非常大,传统的Q-learning算法在实际应用中仍然存在训练时间长、收敛速度慢等问题。
2.2 基于深度Q网络的车辆路径规划为了克服传统Q-learning算法的缺点,研究者提出了深度Q 网络(DQN)。
DQN通过利用深度神经网络来近似Q值函数,将车辆路径问题的状态空间映射到一个连续空间,从而大大减少了训练时间和存储空间。
研究者在实验中发现,DQN可以在较短的时间内找到最优解,并且具有较高的求解精度。
同时送取货车辆路径问题算法研究综述
可能会导致不必要 的车辆被使用 , 因此可 以通过将在客户处 的
所不同 的是 , 在
中, 客户
节点 既 具 有 送 货 需 求 (
) , 也 具 有 取 货 需 求
就原材料 的再循环率 、 产 品包装 的 回收, 甚 至产品全部 生命周
期( 包 括义务进 行产 品使用 期结 束后 的 回收 ) , 对 工业 界提 出
一
(
) 。两种需求 的大小都 不超 过车 辆 的容量 , 当
送货和取货两种操作同时进 行来 避免 这种情况 的发生 。另外 ,
受环境保护意识的影响 , 许多实 际问题 中, 顾客具有送货 、 取货
两种需求 , 考虑到操作 的复杂程度 , 他们 可能不会 接受两 种需
求被分开服务 , 而 同时执行 送货 、 取货 两种服务 可 以在很 大程 度上减少这种操作复杂度 , 因此顾客要求 只能被服务一次 。以 上 问题 的解决 归结 为求解 同时送 取货 车辆 路 径 问题 (
第 2期
王科峰 , 等: 同时送取 货车 辆路 径 问题 算 法研 究综述
・ 3 3 5・
而是呈现不规则 变化 。所 以 V R P S D P解 的负 载能力 可行性 控 制是 区别 于 V R P求解 的难 点所 在。 V R P S D P在现 实生 活 中 也广 泛 存 在。例 如 , 在 饮 料 工 业
车辆服务客户 的时候 , 同时执行送 货 、 取货两 种操作从 而保证 每个客户 只被服务一次 。其 目标是最小化总的行驶路径长度 。 正如上文所述 , 中客户节点 具有发货 、 收货两种 需求 , 中那样 单调 变化 ,
车辆路径规划问题研究综述

车辆路径规划问题研究综述车辆路径规划问题是指在移动车辆的过程中,如何有效地规划车辆的路径以达到最优效果的问题。
这个问题所涉及到的领域十分广泛,涵盖了数学、运筹学、计算机科学、交通管理等多个领域。
本文将对车辆路径规划问题的研究现状进行综述,着重介绍其研究背景、现有的方法和正在进行的研究。
一、研究背景随着城市发展和交通流量的不断增加,车辆路径规划问题愈加重要。
对于个人车主、出租车司机等个体而言,找到最短时间或最短路程的路径对其节省时间和成本非常重要,并且还可以缓解城市拥堵的问题。
而对于大型物流企业、公交公司等,车辆路径规划问题更加复杂,需要考虑路线、载负量、油耗等多种因素。
二、现有的方法1.贪心算法贪心算法是一种简单且高效的方法,其核心思想是每一步都选择当前最优的解决方案,最终达到全局最优解。
在车辆路径规划问题中,贪心算法可以通过选择邻近最短路径、最大带宽路径等来进行路径规划。
但贪心算法容易陷入局部最优解,并且无法解决动态路径规划问题。
2.遗传算法遗传算法是一种模拟自然进化的计算方法。
它通过对染色体的交叉、变异等操作,模拟自然选择和遗传,最终得到问题的优化解。
在车辆路径规划问题中,遗传算法可以通过将路径表示成染色体,然后通过遗传算法搜索最优路径。
3.动态规划动态规划是一种以广度优先搜索为基础的算法,用于解决其他算法无法解决的最优化问题。
车辆路径规划问题可以通过动态规划的方法进行求解,其中最重要的问题是如何设计状态转移方程。
动态规划算法的缺点是计算量大,只适用于小规模的问题。
三、正在进行的研究目前,越来越多的研究者将深度学习技术应用于车辆路径规划问题中。
深度学习可以通过模拟人类的学习过程,不断优化得到更加精准的预测和规划结果。
例如,一些研究者通过构建智能交通系统,使用深度学习识别城市中的车辆和行人,在此基础上进行路径规划,取得了不错的效果。
另外,一些研究者也将多智能体强化学习算法引入车辆路径规划问题中。
车辆路径问题研究综述
车辆路径问题研究综述作者:吴姝雨来源:《商场现代化》2016年第17期摘要:作为现代物流领域的研究前沿,车辆路径问题的求解算法及应用领域一直是学者研究的重点。
本文在研读大量文献的基础上介绍了遗传算法的研究现状及其应用情况,并对车辆路径优化在生鲜农产品配送上的应用进行了简单的综述。
关键词:车辆路径问题;遗传算法;生鲜农场品;研究综述一、引言车辆路径问题最早在60年代被提出,Dantzig和Ramser首次在交通领域提出该问题就立即引起了社会的广泛关注。
发展到现如今,车辆路径问题的应用已经跳出了交通领域,在别的很多领域被使用,如:通讯、工业管理、航空等。
二、遗传算法1.遗传算法简介达尔文的生物进化论自被提出以来就一直被科学家们广泛应用到各个领域。
60年代时美国科学家结合进化论,提出了遗传算法。
跟大自然中生物优胜劣汰的进化过程类似,遗传算法在计算过程中模拟了自然界各种群由简单到复杂,由低级到高级的进化过程,不断进化种群,直至使种群达到包含最优解或接近最优解的状态。
2.遗传算法研究现状遗传算法作为一种群体随机搜索方法,在车辆路径问题研究中运用很多。
很多国内外的研究学者对基础的遗传算法进行了改良,以期达到求解不同约束条件下车辆路径优化问题的目的。
通过研究撰写遗传算法的文献发现,研究学者们分别用各种改进遗传算法对车辆路径问题进行了求解,如:免疫遗传算法、小生境遗传算法,以及遗传算法与爬山算法、禁忌搜索算法、蚁群算法相结合的混合算法。
将基础的遗传算法与改进的遗传算法进行对比仿真实验,可以发现经过改良的遗传算法,其各方面能力都更优。
罗勇等为了求解更优的物流配送路线,就采用了针对性改进的遗传算法。
通过研究发现,改良后的算法不仅收敛速度变快,而且全方位寻优的能力也有很大提高。
由此可见改进的遗传算法是能更好的处理物流配送路径问题。
基础的遗传算法有容易陷入局部最优和早熟的缺点,为了解决这个问题,周艳聪等设计了基于小生境技术的改进遗传算法,还在改进的遗传算法的基础上求解了物流配送路径的优化问题。
电动车配送路径优化研究综述
摘要:电动车路径优化问题作为传统车辆路径问题的重要扩展,受到许多学者的关注。
本文较系统地整理了国内外关于电动车路径优化问题的文献,详细总结了考虑多车型、充电策略、不同电能消耗模型等因素的电动车路径优化研究,并提出了今后电动车路径优化研究可能会更关注于考虑外界因素对电池容量、电能消耗等方面的影响。
关键词:电动车;路径优化;多车型;充电策略;电能消耗1引言近年来,随着我国经济和电子商务的快速发展,每年的包裹快递量不断增长,城市配送运力需求大增。
据国家邮政局统计,2020年1~10月快递业务量已超600亿件,超过了2019年全年业务量。
不可否认,快速发展的现代物流业对经济发展起着至关重要的作用。
但物流配送活动的急剧增加也带来了能源消耗、环境污染等一系列问题。
相比传统燃油车,电动车以其环保、节能的特点脱颖而出,逐渐成为物流业重要的运输工具。
与此同时,针对电动车配送路径规划的研究得到了许多学者的关注,电动车路径优化问题(E l e c t r i c V e h i c l e R o u t i n g P r o b l e m,E V R P)成为时下新的热门研究领域。
与传统车辆路径问题(V e h i c l e R o u t i n g P r o b l e m,V R P)不同的是,E V R P在优化配送路线时,除了考虑满足V R P已有的时间窗限制、车载容量限制等约束外,还需考虑电动车续航里程短和充电时间长等因素,然后在此基础上科学调度配送车辆、确定车辆行驶路线,以使配送总距离或总成本最小。
目前,虽然国内外许多学者已经在E V R P领域发表了相关论文,但对该领域的研究缺乏系统梳理与分析。
随着论文数量的不断增多,对E V R P研究领域的论文进行系统的归纳与总结有助于学者更直观的了解E V R P的研究现状,避免重复研究。
2E V R P研究综述V R P最早在1959年由D a n t i n g和R a ms e r提出[1],这也是最传统、最经典的车辆路径问题。
车辆路径问题:研究综述及展望
车辆路径问题:研究综述及展望作者:史春燕黄辉来源:《物流科技》2014年第12期摘要:车辆路径问题是物流系统优化中的关键内容之一,是现代物流管理研究中的重要内容。
文章梳理分析了车辆路径问题(VRP)的分类、模型及算法等,详细综述了多车型、多车场、时间窗车辆路径问题研究现状,指出联盟车辆调度问题、考虑车辆(供应)时间窗的车辆调度问题可能是VRP问题未来新的研究趋势。
关键词:车辆路径;多车型;多车场;时间窗中图分类号:U116.2 文献标识码:A车辆路径问题是运输组织优化中的核心问题,也是运筹学中的一类经典的组合优化问题,旨在借助构造适当的车辆行驶路线以实现运输成本的最优化。
随着市场经济的发展和物流专业化水平的提高,车辆路径问题从提出之初就受到广泛关注。
到目前为止,该问题的应用不仅仅局限在汽车交通运输领域,在航空、通讯、电力、工业管理和计算机应用等领域也有一定的应用。
1 车辆路径问题车辆路径问题来源于交通运输,最早是由Dantzig和Ramser[1]于1959 年发表在《Management Science》上的文章《The Truck Dispatching Problem》中首次研究了亚特兰大炼油厂向各加油站发送汽油的运输路径优化问题,并提出了基于线性规划的求解过程。
在随后的几十年里,VRP问题得到不断的扩充和发展。
1.1 分类自车辆路径问题被提出后,Linus(1981),Bodin和Golden(1981),Assad(1988),Desrochers(1990)等许多学者从不同视角,按不同标准对该问题进行了分类[2],例如:按车辆类型分,可分为单车型问题和多车型问题;按配送中心(车场)数目分,可分为单配送中心(车场)问题和多配送中心(车场)问题;按任务特征分,可分为纯送(取)货问题和装卸混合问题;按有无时间约束分,可分为无时间窗问题和有时间窗问题,另外可以按车辆装载情况、按优化目标数、按车辆对车场的所属关系、按已知信息的确定性分等不同分类标准进行分类。
物流配送车辆路径问题
27
精确算法
➢指可求出其最优解的算法,且一般要求问题能用 相应的数学模型表示。
18
2.2.4 带回程运输的VRP
(
VRP with backhauls,VRPB)
特点
➢客户集:去程客户,L={1, 2, …, n}
回程客户,B={n+1, …, n+m}
➢先服务去程客户,后服务回程客户。
描述
➢求一个具有最小总费用的由K条简单回路组成的集 合,并满足
(1)、(2)同CVRP;
22
2.3 车辆路径问题的研究现状和发展趋势
➢Dantzig和Ramser于1959年首先对VRP进行了研究 。他们描述了一个将汽油送往各加油站的实际问 题,并提出了相应的数学规划模型及其求解算法 。
➢1964年,Clarke和Wright提出一种对DantzigRamser方法进行改进的较有效的启发式算法—— Clarke-Wright节约算法。
➢在这两篇开创性的论文发表后,VRP很快引起学
术界和实际工作者的极大重视,成为近二十多年
来运筹学领域的研究热点之一。特别是物流配送
活动中的配送车辆行驶路径问题,是近年来VRP
的重点研究对象和应用领域。
23
➢1983年,Bodin等人在长达140多页的对VRP的研 究进展进行综述的文章中,就列举了699篇相关的 参考文献。
1
车辆路径问题的特点
1. 道路网(road network) • 弧表示路段,点表示道路交叉点、配送中心和
客户。 • 弧的权cij表示其距离或行驶时间。
车辆路径规划问题研究综述

车辆路径规划问题研究综述车辆路径规划问题是指在给定的起点和终点之间,通过最优的路径规划算法,使得车辆在规定的时间内到达目的地,并避免拥堵、减少行驶距离、节约燃料等目标的问题。
随着智能交通系统的不断发展和普及,对于车辆路径规划问题的研究也变得越来越重要。
本文将对车辆路径规划问题的研究现状进行综述,包括问题定义、常见的解决方法、存在的挑战以及未来的发展趋势。
车辆路径规划问题通常可以分为静态路径规划和动态路径规划两种类型。
静态路径规划即车辆在出发前已知道起点和终点,并通过算法寻找最优路径;动态路径规划则是在行驶过程中根据实时交通情况和道路状态重新规划路径。
这两种问题的研究都具有重要意义,且有着各自的研究方法和应用场景。
针对静态路径规划问题,已经出现了多种解决方法,如Dijkstra、A*、Bellman-Ford、Floyd等经典算法,以及遗传算法、模拟退火算法、人工神经网络等启发式算法。
这些算法都在一定程度上解决了静态路径规划问题,但是在大规模路网、复杂交通条件下的效率和精度还存在一定的提升空间。
在动态路径规划问题上,由于交通状态的不确定性和实时性,常见的方法有基于实时交通数据的最短路径算法、基于强化学习的智能路径规划算法等。
这些方法能够更好地适应实际交通状况,但是算法的复杂度和实时性依然是研究的重点和难点。
车辆路径规划问题的研究还面临着一些挑战。
首先是大规模路网下的路径搜索效率和精度问题,其次是多目标优化问题,如在节约行驶距离的同时避免拥堵,这需要考虑更多的因素和约束条件;最后是在实际应用场景中,如何将研究成果有效地应用到城市交通管理、车辆导航系统中,需要进行更多的实证研究和技术落地。
未来,车辆路径规划问题的研究将朝着以下几个方向发展。
首先是基于大数据和人工智能的路径规划算法,通过深度学习等技术挖掘交通数据中的规律,实现更智能化的路径规划。
其次是多模态交通路径规划的问题,即考虑不同交通工具的组合使用,实现多种交通方式之间的无缝衔接。
物流配送车辆路径优化方法研究
物流配送车辆路径优化方法研究摘要随着我国物流业的发展,物流配送车辆路径优化问题日益受到重视。
优化物流配送车辆路径可以提高物流配送效率、降低物流成本。
本文首先阐述了物流配送车辆路径优化的研究背景和意义,然后介绍了物流配送车辆路径优化问题的基本概念和模型,接着具体阐述了物流配送车辆路径优化问题的求解方法和优化策略,并举例说明了优化策略的有效性,最后进行了总结和展望。
关键词:物流配送车辆;路径优化;模型;求解方法;优化策略AbstractWith the development of logistics industry in China, the problem of optimizing the route of logistics distribution vehicles has been increasingly valued. Optimizing the routeof logistics distribution vehicles can improve logistics distribution efficiency and reduce logistics costs. This paper firstly expounds the research background and significance of optimizing the route of logisticsdistribution vehicles, then introduces the basic concepts and models of optimizing the route of logistics distribution vehicles, and further elaborates the solving methods and optimization strategies of optimizing the route of logistics distribution vehicles. Finally, the validity of optimization strategies is illustrated by examples, and the conclusion is drawn and prospects are put forward.Key words: logistics distribution vehicles; route optimization; model; solving methods; optimization strategies一、背景与意义随着国民经济的发展和人民生活水平的提高,电子商务、快递配送、物流供应链等行业得到了迅猛发展。
绿色车辆路径问题研究综述
DISCUSSION AND RESEARCH探讨与研究引言1959年,车辆路径问题(VRP)被Dantzig和Ramser首次提出,他们描述的是一个关于卡车批量运输汽油时车辆调度和服务站选址的问题,该问题的提出在交通领域引起了广泛关注,之后研究学者也展开了不同方向的研究。
随着现代物流业的高速发展,以降低油耗、减少碳排放为目标的绿色车辆路径问题(GVRP)是一个新的研究方向,降低环境成本也是物流企业发展创新的新形势,所以GVRP备受关注。
1.传统VRP与绿色VRP1.1传统VRP根据传统VRP研究的侧重点不同,建立的模型会有很多分类,随着研究的不断深入,VRP模型从一些基本的分类模型中衍生出了很多其他模型。
(1)基本VRP:有较少能力约束的VRP、有时间窗约束的VRP、分散配送VRP等,这类问题中约束条件较少,研究成果相对较多;(2)衍生VRP:模糊VRP、动态网络VRP、动态网络VRP 等,这类问题中存在更多的不确定因素,但是更符合实际。
1.2绿色VRPGVRP最主要的目标是在确保可持续发展的前提下实现企业效益最大化,达到环境效益、企业效益以及社会效益的高度统一。
目前,对GVRP的研究主要集中在降低油耗、减少CO2的排放这个方面,通过建立车辆的油耗计算模型计算油耗量,分析与碳排放因子之间的关系,合理安排车辆的运输路线,达到绿色运绿色车辆路径问题研究综述文/杨萍 蒋洪伟摘 要:车辆路径问题(VRP)是物流业发展的一个关键问题,设计一个高效的交通网络成为当代研究VRP的一个重要的环节。
但是在传统VRP中,企业更多的是追求自身的效益,却忽略了环境问题。
为响应国家节能减排的号召,绿色VRP应当成为物流活动中的一大进步。
本文简单介绍传统VRP和绿色VRP的几种表现形式,了解基于低能耗、低碳的绿色车辆路径问题,并对油耗计算模型中考虑到的因素进行简单综述,最后对绿色车辆路径问题的研究方向进行展望。
关键词:低碳;低能耗;GVRPCopyright©博看网 . All Rights Reserved.中国储运网 107探讨与研究 DISCUSSION AND RESEARCH输的效果。
车辆路径规划问题研究综述

车辆路径规划问题研究综述车辆路径规划问题 (Vehicle Routing Problem,VRP) 是指在满足配送需求的前提下,确定一组送货路径,使得配送的总成本最小或时间最短。
VRP是一个NP难问题,是物流管理和运输领域中的重要问题。
VRP的研究始于二战期间,由于士兵的物资需求需要通过多个加油站进行配送,而在当时计算机资源有限,无法快速求解这个问题。
VRP得到广泛研究的原因是它在实际生产活动中的应用广泛,如货物配送、路线规划、流量控制等。
近年来VRP受到了越来越多的关注,因为它与物流配送、城市交通规划等问题密切相关,而这些问题恰恰是一个快速发展的市场,且对效率改善和节能减排要求越来越严格。
VRP的研究成果已经很多,主要可以分为一般VRP、车辆路径规划问题和带有其他限制条件的VRP三类。
一般VRP是指没有任何限制条件的问题,旅行商问题是一种典型的一般VRP。
早期的VRP研究大多采用数学规划方法求解,后来随着约束条件的增多,这种方法的可行性越来越差,另外目标函数也越来越复杂。
车辆路径规划问题是一个具有限制条件的一般VRP问题,主要是要在送货路径中满足车辆的容量、配载时间限制,以及能够遵守交通规则等,同时降低配送成本。
传统方法对这种问题的求解往往是使用贪心算法,根据车辆容量和距离等因素来优化路径,但是这种方法在复杂条件下效果较差,因此人们逐渐转向基于智能算法的方法求解。
最近几年在车辆路径规划问题的研究中,基于智能算法的方法受到了广泛关注。
常用的智能算法包括遗传算法、禁忌搜索算法、粒子群优化等方法。
这些方法通过对优化目标的全局搜索,可以在较短时间内找到较好的解决方法,而且能够很好地处理约束条件和路径的优化问题。
当有其他限制条件时,我们称它为带有其他限制条件的VRP问题。
例如,考虑由多个不同车型组成的车队进行同时配送,每种车型的特征和配送能力都不同,就会涉及到车辆类型分配问题;再比如在一些特定场景下,需考虑时间和空间等方面的限制,涉及到多目标优化问题和时空约束问题。
车辆路径安排问题算法研究综述
元启发式算法是一类算法 的总称 , 主要包括遗传算法 、 模拟退火算法、 蚁群算法、 禁忌搜索算法等 。本文根据
求解 V P算法 的分类 , R 概要介绍了 V P R 算法近五年来的研究成果, 并对未来 V P的研 究前景作 了展望 。 R
陈文兰 戴树贵
( 滁州学院 数学Βιβλιοθήκη ,安徽 滁州 290 ) 300
摘
要: 车辆路径安排是决定物沈配送费用的主要 因素。车辆路径安排问题(e ie R u n rbe ,R ) V hc ot g Poll v P是 l i
近 年 来 应 用 数 学 、 算机 科 学 和 物 沈 科 学研 究 的 一个 热 点 问题 , 生 了众 多 的研 究 成 果 。本 文 首先 讨论 了 V P 计 产 R 的 分 类 , 后 基 于 V P算 法 构造 方 法 的 分 类 , 要 介 绍 了近 五年 来 V P算 法 研 究 的 主 要 成果 , 对 研 究方 法 然 R 概 R 并 进 行 了分 析 , 后对 全 文进 行 了总 结 , 探 讨 了该 问题 未 来 的研 究方 法 。 最 并
关键词: 车辆路径安排 问题; 精确算法 ; 启发 式算法 ; 元启发式算法 中图分类号 ;P0 . T316 文献标识码 : A 文章编号: 6 3 1 9 2 0 ) 3 0 1— 7 1 7— 7 4( 0 7 0 — 0 9 0
作者简介: 陈文 兰(9 2 )女 , 17- , 浙江绍兴人 , 士, 硕 滁州学院数 学系。
维普资讯
第 9卷 第 3期
20 0 7年 5 月
滁 州 学 院 学 报
J l A FC 删 伽 U lESr 伽 I Lo 删 N N1 R rY ,
强化学习在车辆路径问题中的研究综述

强化学习在车辆路径问题中的研究综述强化学习在车辆路径问题中的研究综述随着交通运输的迅猛发展,车辆路径问题对于实现高效、智能的交通系统管理具有重要意义。
强化学习作为一种重要的人工智能技术,在车辆路径问题中的应用也得到了广泛关注和研究。
本文将对强化学习在车辆路径问题中的研究进行综述,总结其中的主要方法与进展。
一、强化学习概述强化学习是一种通过智能体与环境进行交互,从而使智能体在环境中学习并选择最优行动的机制。
其基本框架包括环境、智能体、状态、行动和奖励信号。
智能体在与环境的交互中,通过试错和反馈的方式学习,并根据奖励信号来调整自身的行为。
二、车辆路径问题的挑战车辆路径问题是指在给定的道路网络中,规划车辆的最佳路径,使得车辆能够从起点到达目的地,并考虑到交通拥堵、道路容量等限制条件。
车辆路径问题的挑战主要包括车辆数量大、路径选择困难、实时性要求高等。
三、强化学习在车辆路径问题中的应用1. 基于马尔科夫决策过程的路径规划马尔科夫决策过程是指根据当前状态选择最佳行动的数学模型。
通过将车辆路径问题抽象为马尔科夫决策过程,可以利用强化学习方法求解最优路径。
2. 基于深度强化学习的路径规划深度强化学习结合了深度学习和强化学习的优势,在车辆路径问题中得到了广泛应用。
通过使用深度神经网络来近似值函数,可以更准确地表征车辆路径问题中的状态和行动空间,并进一步优化路径规划结果。
3. 基于群智能算法的路径规划群智能算法是一种模拟自然界生物群体行为的方法,可以模拟车辆在道路网络中的路径选择过程。
通过强化学习方法引入群智能算法,在车辆路径问题中可以模拟车辆的集体智慧,提高路径规划的效率。
四、强化学习在车辆路径问题中的挑战与展望虽然强化学习在车辆路径问题中取得了一定的进展,但仍然存在一些挑战。
首先,强化学习算法需要大量的训练时间和计算资源。
其次,车辆路径问题的复杂性导致了状态空间和行动空间的巨大增长,增加了求解最优路径的难度。
物流配送系统中车辆路径问题应用研究的开题报告
物流配送系统中车辆路径问题应用研究的开题报告一、研究背景随着电商、快递等行业的不断发展,物流配送系统越来越重要。
同时,智能物流配送系统也逐渐得到应用,其中车辆路径问题是其中的核心问题之一。
物流企业需要合理分配车辆、制定行车路线,保证货物的快速、准确安全配送。
因此,研究物流配送系统中车辆路径问题,优化调整运输路线及时满足客户需求成为关键。
二、研究目的本研究的目的是探究物流配送系统中车辆路径问题,分析影响该问题的主要因素和解决方法,以提高物流企业的配送效率和客户满意度,减少物流成本、提高物流配送的可持续性。
三、研究内容(1)物流配送系统的概述:介绍物流配送系统的概念、发展趋势、主要功能等。
(2)车辆路径问题的定义:阐述车辆路径问题的数学模型、特点及相关的算法。
(3)物流配送系统中车辆路径问题的应用:探究物流配送系统中车辆路径问题的应用领域,如何将其应用于企业实践中,优化调整运输路线,提高配送效率。
(4)车辆路径问题的解决方法:综合比较常用的解决方法,如启发式算法、粒子群算法等,分析各方法的优缺点及适用范围等。
(5)案例分析:以某物流企业为例,针对该企业的实际情况,借助车辆路径问题的解决方法,改进配送策略优化调整运输路线,提高配送效率、降低物流成本,提高客户满意度。
四、研究方法首先,对车辆路径问题的数学模型和算法进行分析,了解问题的本质及解决方法,然后将其应用于物流配送系统中,探究可行的解决方案。
最后,以案例分析的方式验证所提出的解决方案的有效性。
五、研究意义本研究可以为物流企业提供参考,改进配送策略、优化运输路线,提高配送效率、客户满意度和经济效益。
同时,也为相关学科研究提供技术支持,促进智能物流配送系统的发展和实际应用。
六、研究进度安排(1)阅读相关文献,深入研究车辆路径问题的定义及算法等相关知识。
(2)了解物流配送系统的概念、功能,并深入研究其优化调整运输路线的方法。
(3)探究物流配送系统中车辆路径问题的应用领域,分析其解决方案的可行性和可操作性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
䝽䘱䘀䗃ѝⲴ䖖䖶䐟 䰞仈⹄ウ㔬䘠㾱˖䝽䘱䘀䗃ѝⲴ䖖䖶䐟 䰞仈аⴤ 䘀ㆩ 亶 Ⲵ⹄ウ✝⛩ѻаDŽ Ҿ䖖䖶䐟 䰞仈Ⲵ ⭘㛼 ˈ 㓣 㔃Ҷ ㊫䰞仈 ≲䀓㇇⌅Ⲵ⹄ウ䘋 ˈ 䎻 ˈѪ 䢤DŽ䭞䇽˖⢙⍱䝽䘱˗䖖䖶䐟 䰞仈˗䙊⭘ ㇇⌅˗㔬䘠DŽThe Current Situation and Development Trends on Vehicle Routing Problems of distribution managementAbstract: Vehicle routing problem is one of the attractive research area in the circles of operations research. In this paper, on the basis of introducing briefly the application background, the research classified the vehicle routing problem, analyzed and summarized the progress of different type of problems and solution algorithms. Furthermore, the research progress of the problems is also discussed. It is expected to provide inference for relevant research work.Key words: distribution management; vehicle routing problem; heuristics; overview.䀶䲿⵰㓿⍾Ⲵ 、 Ⲵ䘋↕ˈ⢙⍱ӗъ䗵䙏 ˈ Ѫ ≁㓿⍾ Ⲵ 㜹 ӗъˈ ≤ 㺑䟿ањ ⧠ԓ 〻 㔬 Ⲵ䟽㾱 ḷDŽкц㓚80 ԓԕ ˈ ⢙⍱ӗъⲴ ˈ⢙⍱ъ Ѫањ⤜・Ⲵӗъ䗵䙏 䎧DŽ❦㘼ˈ ⢙⍱ъӽ Ҿ 㓗䱦⇥ˈо 䗮 ∄䘈 а Ⲵ 䐍ˈ ѝ ケ Ⲵ䰞仈 ⢙⍱ 䖳儈DŽ 㔏䇑[1]ˈ ⢙⍱ 䍩⭘Ѫ7.1зӯ ˈ GDPⲴ∄䟽Ѫ17.8%ˈ㘼 㖾 ㅹ 䗮 ⢙⍱ 㓖 GDPⲴ10%ˈ丙 ㅹѝㅹ 䗮 Ⲵ∄䟽㓖Ѫ15%DŽ䗷儈Ⲵ⢙⍱ Ѫ 㓖 ≁㓿⍾ Ⲵ䟽㾱 ㍐DŽ ↔ˈ 儈⢙⍱ъⲴ、 ㇑⨶≤ ǃ䱽վ⢙⍱ ӏ䴰䀓 Ⲵ 䭞 䰞仈DŽ䘀䗃 ⢙⍱ Ⲵ䟽㾱㓴 䜘 DŽ 䘀䗃 ⢙⍱ 䍩⭘Ⲵ∄ 䖳儈ˈ㓖Ѫ50%[1]DŽ䱽վ䘀䗃 ˈ 儈䘀䗃 ⦷ǃ 䘋⢙⍱ъ 㔝 Ⲵ䟽㾱䙄 DŽѪ⢙⍱䝽䘱ѝⲴ 䭞а⧟ˈ䖖䖶䐟 䰞仈˄Vehicle Routing Problem, VRP˅ 䘀䗃㓴㓷Ո ⲴṨ 䰞仈ѻаDŽ㠚1959 Dantzig Ramser[2]俆⅑ ԕ ˈVRP Ѫ䘀ㆩ 㓴 Ո 亶 Ⲵ ⋯о⹄ウ✝⛩ѻаDŽ⧠ ⭏ӗѝˈ䛞 䘀䗃ǃ 䖖 ⊭䖖䈳 ㅹ䈨 䰞仈䜭 ԕ 䊑ѪVRPDŽ ↔ˈ VRPⲴ␡ ⹄ウˈ ⵰䟽㾱Ⲵ、 ѹ 〻 ⭘ԧ DŽ 㓣 㔃ҶVRP Ⲵ⹄ウ䘋 ˈ ҶVRPⲴ 䎻 ˈѪ 㓿傼 䐟DŽ1. 䖜䖼䐥 䰤从Ⲻ 䘦Ր㔏кˈ 䖖䖶䐟 䰞仈Ⲵа㡜 䘠Ѫ[3, 4]˖ а㌫ 㔉 Ⲵ ˄䘱䍗⛩ 䍗⛩˅ˈ⺞ 䘲 Ⲵ䝽䘱䖖䖶㹼傦䐟㓯ˈ Ӿ䝽䘱ѝ ˈ ⅑ 䇯䰞 њ ⛩ˈ 䘄 䝽䘱ѝ ˈ ┑䏣а Ⲵ㓖 Ԧл˄ 䖖䖶䖭䍗䟿ǃ 䴰≲䟿ǃ 䰤デ䲀 ㅹ˅ˈ 䘀䗃 ˄ ⭘䖖䖶 ǃ䖖䖶㹼傦䐟〻 䰤˅䗮 DŽ 1 ⽪ˈ ѝⲴ Ṷ㺘⽪䖖䖶 ⛩˄ 䖖 䝽䘱ѝ ˅ˈ ⛩㺘⽪䴰㾱䇯䰞Ⲵ ⛩ˈ㓯⇥㺘⽪є⛩ѻ䰤Ⲵ䘎 䐟⇥ˈ ѝ⇿ 㓯⇥ ⵰ањ䍩⭘˄ 䐍 㹼傦 䰤˅DŽ1 䖜䖼䐥 䰤从⽰Fig.1 Schematic figure of VRPⲴ䖖䖶䐟 䰞仈ѫ㾱 ԕлṨ 㾱㍐[5]˖䚃䐟㖁㔌˄Road Network˅ǃ ˄Customer˅ǃ䝽䘱ѝ ˄䖖 ˅˄Distribution Center, Depot˅ǃ䖖䖶˄Vehicle˅ǃ傮傦 ˄Driver˅ǃ䲀 Ԧǃ㹼傦䍩⭘ 㹼傦 䰤ˈԕ Ո ⴞḷ˄Objective˅DŽ њ㾱㍐Ⲵ⢩ 㿱㺘1DŽ㺞1 䖜䖼䐥 䰤从Ⲻ㓺 㾷㍖Tab. 1 Key elements of VRP㓴 㾱㍐⢩䚃䐟㖁㔌1. VRPⲴṨ 㾱㍐ѻа˗2. 䙊 ⭡ 㢲⛩ 㓴 Ⲵ䍻 㺘⽪DŽ 㺘⽪䐟⇥ˈ⛩㺘⽪䚃䐟Ӕ ⛩ǃ䝽䘱ѝ ˗3. ṩ 䐟㖁㚄є⛩䰤Ⲵ䚃䐟⢩ ˈ Ⲵ Ѫ ˗ 䍻Ҹ⇿ 䶎䍏Ⲵ䍩⭘ 䟽ˈ є⛩䰤Ⲵ䘀㹼䐍ˈ䘀㹼 䰤ㅹDŽ1. VRPѝ䖖䖶 Ⲵ 䊑ˈ Ҿ㖁㔌 ѝⲴ ⛩˗2. ⛩Ⲵ ㊫ ˖䘱䍗 ˄Delivery˅ǃ 䍗 ˄Pickup˅ є㘵˗3. ⛩Ⲵ 䴰≲䟿˖а⅑┑䏣ˈ ˄Split˅;4. ⛩Ⲵ 䰤˖䖖䖶 ӔԈ 䍗⢙ 㣡䍩Ⲵ 䰤˗5. ⛩Ⲵ 䰤デ˖ 㾱≲ Ⲵ 䰤 䲀ˈ Ѫ⺜ 䰤デ[6]䖟 䰤デ[7]˗6. ⛩ Ⲵ ⅑ ˖ Ո 㓗˗ ㊫ 亪ˈ 䘱䍗 䍗˗7. ⛩Ⲵ ㌫˖ ḀӋ лˈ ⛩Ⲵ䝽 ㌫ˈ Ӿањ 䍗❦ 䘱 оѻ䝽 Ⲵ⢩ 䘱䍗 ⛩DŽ䝽䘱ѝ 1. ⇿ 䖖䖶䐟㓯Ⲵ䎧⛩ 㓸⛩ˈ Ҿ㖁㔌 ѝⲴ ⛩˗2. 䖖 䟿˖ањ䖖 њ䖖 ˗3. 䖖䖶 䘄 䖖 ˖ VRP[5, 8]ˈ䰝 VRP˗4. 䖖 䰤デ˖ḀӋ лˈ䖖 䲀 ⢩↺㾱≲˄ Ⲵ 䰤 䰤˅˗5. 䖖 ѻ䰤Ⲵ ㌫˖ḀӋ лˈ䖖 䰤 䝽 ㌫ˈ Ӿањ䖖 䛓䟼 Ⲵ䖖䖶 享 оѻ䝽 Ⲵ Ⲵ䖖 DŽ䖖䖶1. 䖖䖶 㠚 䘈 』ˈ ԫ 䘄 ˗2. 䖖䖶㊫ ˖ VRPѝ 䇮䖖䖶Ѫ а㊫ ˈն 䱵䝽䘱㇑⨶ѝˈ䖖䱏 ⭡ н 㻵䖭㜭 ǃн ԕ Ⲵ 䖖䖶㓴 ˗3. 䖖䖶Ⲵ㻵䖭㜭 ˖䖖䖶 Ⲵ䖭䟽䟿 Ⲵ㻵䖭 䟿ㅹ˗4. 䖖䖶 ˖䖖䖶Ⲵ ˈ 䖖䖶䍝㖞䍩⭘ㅹ˗ ⭘ ս 䟼Ⲵ䍩⭘ ս 䰤Ⲵ䍩⭘ 㺑䟿˗5. 䖖䖶Ⲵ 㔝 ˄Duration˅˖䖖䖶 Ⲵ 䇨㹼傦䐍 䰤DŽ傮傦 1. 㔉傮傦 䘱䍗ԫ ˈ 享ㅖ 䰤Ⲵ 㿴 DŽ 傮傦 䲀 Ԧа㡜䜭 Ⲵ䖖䖶䲀 ԦѝDŽ䲀 Ԧ1. 䖖䖶Ⲵ 䍏䖭н㜭䎵䗷䖖䖶Ⲵ㻵䖭㜭 ˗2. 㾱≲䘱䍗ǃ 䍗ǃ 䘱䍗 ˗3. 㾱≲Ⲵ 䰤デ 傮傦 Ⲵ 䰤 ˗4. 䇯䰞 Ⲵ亪 㾱≲DŽ㹼傦䍩⭘㹼傦 䰤1. ⛩о ⛩ѻ䰤ǃ䝽䘱ѝ о ⛩ѻ䰤Ⲵ㹼傦䐍 㹼傦 䰤DŽՈ ⴞḷ1. 䘀䗃 ˈ Ҿ 䴰Ⲵ䖖䖶 ˄ 㓯䐟 ˅ǃ 㹼傦䐍˄ 䰤˅˗2. о Ⲵн ㅹ Ⲵ 㖊 ˗3. 㺑 㓯䐟кⲴ㹼傦 䰤 䖖䖶䖭䟽䟿DŽ2. 䖜䖼䐥 䰤从Ⲻ ㊱䙊䗷 к䘠VRPṨ 㾱㍐䱴 н Ⲵ⢩ 䘲 Ⲵ ˈ 㹽⭏ ⿽н Ⲵ䖖䖶䐟 䰞仈㊫ DŽ ⹄ウ[5, 9, 10]ˈ 㿱ⲴVRP ㊫ 㹽⭏㊫ DŽ VRP㊫ 㻵䖭㜭 ⲴVRPǃ 䐟〻䮯 ⲴVRPǃ 䰤デⲴVRPǃ 〻䘀䗃ⲴVRPˈԕ 䘱䍗ⲴVRP˗ ⁑ Ⲵ кˈ㔃 н Ⲵ㓖 Ԧˈ ҶVRPⲴ㹽⭏㊫ ˈ 䲿 VRPǃ⁑㋺VRPǃ VRPㅹDŽ њ㊫ Ⲵ⢩ 㿱㺘2DŽ㺞2 䖜䖼䐥 䰤从Ⲻ㊱Tab. 2 Types of VRP ㊫ ⢩㻵䖭㜭 ⲴVRP˄Capacitated VRP, CVRP˅1. VRPѝ Ⲵ ˗2. 䜭 Ҿ㾱䘱䍗Ⲵ 㾱 䍗Ⲵˈ 䴰≲䟿 ⸕ˈфн ˗3. 䖖䖶 ㊫ ф䜭 ањ䝽䘱ѝ ˗4. 䖖䖶 㻵䖭㜭 Ⲵ䲀 ˗5. Ո ⴞḷ Ⲵ 䍩⭘ DŽ䐟〻䮯 ⲴVRP˄Distance-Constrained andCapacitated VRP, DCVRP˅1. 䖖䖶㻵䖭㜭 䲀 ˈ 䐟〻䮯 䲀 DŽ䰤デⲴVRP˄VRP with time windows, VRPTW˅1. 䲔Ҷ䖖䖶㻵䖭㜭 Ⲵ㓖 ˈ⇿њ 䜭 ањоѻ㚄㌫Ⲵ㾱≲ Ⲵ 䰤 䰤˗2. Ѫ⺜ 䰤デVRP 䖟 䰤デVRPDŽ⺜ 䰤デ ⇿亩ԫ 享 㾱≲Ⲵ 䰤 ˈ䖟 䰤デ Ḁ亩ԫ н㜭 㾱≲Ⲵ 䰤㤳 ˈ 㔉Ҹа Ⲵ 㖊[11]DŽ〻䘀䗃ⲴVRP˄VRP with backhauls, VRPB˅1. 䳶㻛 2њ 䳶˖㾱≲䘱 а 䟿䍗⢙Ⲵ 〻 ԕ 㾱≲ а 䟿䍗⢙䘀 䝽䘱ѝ Ⲵ 〻 ˗2. 〻 〻 Ⲵ䴰≲ ⸕ф ˗3. 〻 享 Ҿ 〻 DŽ䘱䍗ⲴVRP˄VRP with pickup and delivery˅1. 䖖䖶нӵ 䘱䍗 ˈҏ Ⲵ䍗⢙˗2. ⇿њ ⛩ˈ㿴 㻵DŽ㹽⭏㊫VRP[5]˄Open VRP, OVRP˅1.н㾱≲䖖䖶 ԫ 䘄 ⛩ˈ 㤕㾱≲䘄 ⛩ˈ ⋯ 〻䐟㓯䘄 DŽ䖖 VRP˄Multiple Depots VRP, MDVRP˅1. њ䝽䘱ѝ ˈ䖖䖶 ԕӾԫօањ䝽䘱ѝ ⍮ ˈ ԫ ˈ䖖䖶ҏ ԕ䘄 ԫօањ䝽䘱ѝ ˗2. 䰞仈 Ѫ DŽ䙊 䇮Ḁњ䖖 Ⲵ䖖䖶ӽ䴰䘄 䈕䖖 ˈ≲䀓 ˈ ➗Ḁ⿽㇇⌅ 䝽㔉Ḁњ䖖 ˈ❦ ➗ а䖖 VRP䘋㹼≲䀓[12]DŽ䖖 VRP[13]˄Heterogeneous Fleet VRP,HVRP˅1. 䖖䖶Ⲵ н ˈ䙊 䖖䖶Ⲵ䖭䟽䟿на㠤DŽ䴰≲ ⲴVRP[14]˄VRPwith Split Deliveries˅1. Ⲵ䴰≲ ԕ 㻛 њ䖖䖶 DŽ䲿 VRP˄Stochastic Vehicle Routing Problem, SVRP˅1. Ѫ䲿 VRPǃ䲿 䴰≲VRPǃ䲿 㹼傦 䰤VRP˗2. 䲿 VRP ⢙⍱亶 㓿 ⧠˗3. Ҿ䲿 䴰≲VRPˈ⺞ Ⲵ ⸕ˈն Ⲵ ⺞䴰≲䟿 ⸕ˈ ⟳⋩䝽䘱䰞仈˗4. Ҿ䲿 㹼傦 䰤VRPˈ⹄ウ䖳 ˈ㘼 䲿 㖁㔌 ⸝䐟 䰞仈Ⲵ⹄ウ䖳␡ [15, 16]DŽ⁑㋺VRP˄Fuzzy VRP, FVRP˅1. ḀӋ ˄ 䴰≲ǃ䐍ǃ 䰤デ[3]˅ ⌅ ⺞ 䘠˗2. ⁑㋺ᾲ ⁑ ㇇⌅ 䀓 ↔㊫䰞仈DŽVRP˄Periodic VRP, PVRP˅1. VRPⲴ ˈVRP⹄ウⲴ 䖖䖶Ⲵ ˈ㘼PVRP 䖖䖶Ⲵањ Ⲵ ˈ ањ ˈ⇿њ ┑䏣䴰≲Ⲵ лˈ 㻛 а⅑DŽ䶎 〠㖁㔌VRP˄Asymmetric network VRP, AVRP˅1. ⧠ ѝˈ⭡Ҿ 㹼䚃 ⾱→ 䖜ㅹӔ䙊㇑ ˈ є 䘄Ⲵ䐍 䰤 нㅹ˗2. ⴞ Ⲵ≲䀓㇇⌅䜭 Ҿ䶎 〠TSP䰞仈Ⲵ㇇⌅[17]DŽVRP˄Dynamic VRP, DVRP˅1. 䖖䖶 ˈ䈳 н⺞ 䜘 н⺞ ˗ 䖖䖶 ˈ ⧠ Ⲵ䈳 ˗2. ѹкˈ䲿 VRPˈ⁑㋺VRPˈԕ 㖁㔌VRP䜭 ҾDVRPDŽ↔ ˈ䘈 ԕ 䰤デ㓖 о Ԇ㓖 Ԧ㔃 ˈ 䰤デ㓖 Ⲵ 䘱 ъVRPˈ 䰤デ㓖 Ⲵ 〻䘀䗃VRPㅹDŽ3. 䖜䖼䐥 䰤从Ⲻ≸䀙㇍⌋VRP ⭼ 䇔ⲴNP䳮䰞仈[18]DŽVRP㻛 ˈ ≲䀓㇇⌅Ⲵ 䙐аⴤ ⹄ウⲴ䟽⛩ 䳮⛩DŽⴞ ⿽≲䀓VRPⲴ㇇⌅ˈ 䍘к Ѫ㋮⺞㇇⌅ ㇇⌅є ㊫DŽ㋮⺞㇇⌅ Ҿ ѹ 䇱 ˈ ≲ Ո䀓Ⲵ㇇⌅DŽⴞ ⭘Ҿ≲䀓VRP ԓ㺘 Ⲵ㋮⺞㇇⌅ѫ㾱 ⭼䲀⌅[19]˄Branch and Bound Approach˅ǃ 䶒⌅[20]˄Cutting Planes Approach˅ǃ㖁㔌⍱㇇⌅˄Network Flow Approach˅[21] 㿴 ⌅˄Dynamic Programming Approach˅[22]DŽ⭡ҾVRP NP-䳮䰞仈ˈ Ⲵ㋮⺞㇇⌅Ⲵ䇑㇇䟿а㡜䲿⵰䰞仈㿴⁑Ⲵ 䮯˗ф ⛩䎵䗷50 ˈ㋮⺞㇇⌅ на ≲ 䰞仈Ⲵ Ո䀓[23]DŽ ˈ ⭘䰞仈⢩ ѝㅹ䇑㇇ 䰤 㧧 VRPⲴ⅑Ո䀓 ┑ 䀓Ⲵ ㇇⌅ Ѫ 㘵Ԝ⹄ウⲴ䟽⛩DŽ ㇇⌅ Ѫ㓿 ㇇⌅˄Classical Heuristics˅ 䙊⭘ ㇇⌅˄Metaheuristics˅DŽ3.1 㔅 ㇍⌋˄1˅㢲㓖㇇⌅˄Saving Methods˅⭡Clark WrightҾ1964 俆⅑ [24]ˈ а⿽ Ҿ㢲㓖 Ⲵ䖖䖶䐟㓯䙀↕ 䙐㇇⌅DŽ Ѫ˖ ⇿њ䝽䘱⛩ Ѫа 㓯䐟ˈ 䜘㓯䐟 Ⲵ䳶 Ѫ 䀓DŽ ањ⛩о ањ⛩䘎 а Ⲵ㓯䐟ˈ Ⲵ㓯䐟㜭┑䏣㓖 Ԧˈ 㹼Ⲵˈ Ⲵ㢲㓖 ˄ 䟼〻ǃ䰤ㅹ˅ ѹѪ䘎 䘉є 㓯䐟Ⲵ㢲㓖 DŽӾ 㓯䐟ѝ䘹 㢲㓖 Ⲵ䗩䘋㹼а⅑㓯䐟 ˈ н 㹼ˈ㇇⌅㔃 DŽ䈕㇇⌅ ԕ ┑ 䀓ˈնна 㜭 䇱 Ո䀓DŽ Ո⛩ ⨶ㆰ ф ⧠ˈⴞ Ѫ VRP ㇇⌅ѝӗ⭏ 䀓Ⲵ㇇⌅DŽ䈕㇇⌅ ԕ ˈ 㘵 䘋㇇⌅䘋㹼Ҷ⹄ウˈԕ ≲䀓Ⲵ䍘䟿ˈѫ㾱 ԕл2⿽䙄 ˖а 䙊䗷 Ⲵ 㔃 ㆆ⮕ ⨶㢲㓖 [25, 26]˗Ҽ Ҿ 䝽㇇⌅˄Matching Algorithm˅Ո 䈕㇇⌅ѝⲴ䐟㓯 䗷〻[27, 28]DŽ˄2˅ ㇇⌅˄Sweep Algorithm˅⭡Gillett MillerҾ1974 [29]ˈ ҾĀ 㓴 㓯䐟āⲴ㇇⌅DŽ 䉃Ā 㓴ā ⍮㔉⇿䖶䖖а㓴䝽䘱⛩DŽа⿽ㆰ Ⲵ 㓴 ⌅ ԕ䝽䘱ѝ Ѫ ⛩ˈ ḷ 䶒 Ѫ њ ˈ ↕Ѫ⇿њ Ⲵ⛩ ⍮а䖶䖖DŽ 䉃Ā㓯䐟ā ⇿њ ˈ 䟷⭘ ⌅䘹 䝽⛩ˈ❦ 䟷⭘ ㇇⌅ 㓯䐟DŽ 䘋㹼Ҷа⅑Ā 㓴о㓯䐟āⲴ䐟㓯 䙐 ˈ䘈 䝽⛩ˈ 㔗㔝䘋 Ā 㓴о䐟㓯ā〻 DŽ ↔ ˈⴤ Ⲵ⛩ 䝽 ∅Ѫ→DŽⲴ ㇇⌅а⅑ 㜭ӗ⭏а 䐟㓯ˈ Ѫ ㇇⌅Ⲵ ˈаӋ 㘵⹄ウҶа⅑⭏ 㤕 㹼䖖䖶䐟㓯Ⲵ ⌅ˈ❦ 䙊䗷≲䀓ањ䳶 䰞仈 ⺞ ՈⲴ㓴 ˈ∄䖳 Ⲵ 1-㣡⬓㇇⌅[30, 31] 2-㣡⬓㇇⌅[32]DŽ䴰㾱 Ⲵ ˈ ㇇⌅ 䘲 Ҿ 䶒㔃 ˄Plannar Structure˅ⲴVRPˈ Ҿ䛓Ӌ ḵṬ㺇䚃 ⲴVRPˈ䈕㇇⌅ н䘲⭘DŽ˄3˅䛫 ㇇⌅˄Nearest-Neighbor˅䈕㇇⌅ а⿽ 䙐 䐟㓯⌅ˈ Ӿа ањ䝽䘱⛩Ⲵ㓯䐟 (䙊 䐍䝽䘱ѝ 䘁Ⲵ⛩)ˈӾ 䘹 ⛩ѝㆋ䘹 ⛩ˈ Ӿ ⛩ѝ䘹 ањ⛩ Ѫ 㓯䐟Ⲵ㓸⛩ˈ 㓯䐟Ⲵ DŽԕ↔ 㓯䐟н 䘋㹼 ˈⴤ 㓯䐟⋑ ⛩Ѫ→DŽ ⛩ 䘹 ˈ ㇇⌅㔃 ˗ ˈ ⭏ а Ⲵ 㓯䐟ˈ䟽 䶒Ⲵ㓯䐟 䗷〻ˈⴤ㠣 ⛩䜭 䘹 DŽ˄4˅ ㇇⌅䈕㇇⌅㔃 㢲㓖㇇⌅о䛫 ㇇⌅Ⲵ ˈ 䝽䘱⛩㓣 䐟 ѝԕ 䝽䘱㓯䐟DŽ 〻 о䛫 ㇇⌅լˈ Ӿ 㓯䐟 ˈ 䙐 㓯䐟ˈ ⋑ 㹼 а 㓯䐟DŽ䈕㇇⌅Ⲵ 䭞 䘹 䘲Ⲵ 䝽⛩ 㓯䐟Ⲵ ս㖞䘋㹼 DŽ˄5˅є䱦⇥㇇⌅˄Two-phase Process˅VRPє䱦⇥ ㇇⌅⹄ウѝˈ ԓ㺘 ⲴѪChristofidesㅹӪ[33]ԕ Fisher Jaikumar[34] Ⲵ㇇⌅DŽChistofidesㅹ Ⲵє䱦⇥㇇⌅ѝˈ єњ䱦⇥˖ 䐟㓯 䙐䱦⇥ԕ 㹼䐟㓯 䙐䱦⇥ˈ 䍘 㜭≲䀓ḷ VRPDŽFisher Jaikumarㅹ俆 䙊䗷≲䀓ањ ѹ ⍮䰞仈˄Generalized Assignment ProblemˈGAP˅ ⺞ 㹼Ⲵ亮 ⛩ 㓴ˈ❦ ҾTSP㇇⌅ ⺞ ⇿њ 㓴 Ⲵ䖖䖶䐟㓯DŽGAP ањNP䳮䰞仈ˈ䙊 䙊䗷 Ṭ ㇇⌅ ≲䀓DŽFisher Jaikumar 䲿 Ⲵ⹄ウѝ 㔉 Ҷ亮 ⛩䘹 Ⲵ ⌅ Ṭ ⌅[35, 36]DŽ❦㘼ˈ䈕 ⌅ 䲀 ˖а 䶒ˈ㇇⌅н 㕆〻ˈ 䇑㇇䙏 ⿽ 亮 䘹 ԕ Ṭ 䗷〻 䖳 ˗ а 䶒ˈ㤕䟷⭘Fisher Jaikumar Ⲵ⿽ 亮 ㆋ䘹 ⌅ Ṭ ⌅ˈ ㇇⌅Ⲵ 䖳 ˈа㡜 䳮䗮 㘵 㔉 Ⲵ䇑㇇㔃 [32]DŽ Fisher Jaikumar⹄ウⲴ кˈBramel Simchi-Levi[37]䙊䗷≲䀓ањ㜭 㓖 䘹 䰞仈 ⺞ ⿽ 亮 ⛩ˈՈ ҶFisher Jaikumar ⿽ 亮 ⛩䘹 ⌅ˈն 㘵 㔉 Ҷ 㜭 㓖 VRPк䶒⍻䈅Ⲵ㔃 DŽ ԕⴻ ˈ 䜘 㓿 ㇇⌅ 1960 -1990 䰤 ⲴDŽ 䱵 ⭘ѝˈ ḷ 䀓 䙐 ⌅ 䀓 䘋 ⌅䜭 Ҿ㓿 ㇇⌅DŽа 䶒ˈ 㜭 䀓オ䰤ѝ䘋㹼 䲀 ㍒ˈ 䖳⸝Ⲵ 䰤 ≲ ┑ 䀓˗ а 䶒ˈ䘉㊫㇇⌅㜭 䖳Ѫ ˈԕ 䱵 ⭘ѝ ⻠ Ⲵ䈨 㓖 Ԧˈ ↔ ъ䖟Ԧ ѝ㻛 ⌋ ⭘DŽⴞ ˈ 㓿 ㇇⌅亶 ˈ Ѿ 䘋㹼䟽 䘋Ⲵ DŽ3.2 䙐⭞ ㇍⌋㠚20ц㓚90 ԓˈ䙊䗷⁑ 㠚❦⧠䊑 䗷〻ˈ䇨 㘵 ҶаӋ≲䀓VRPⲴ䙊⭘ ㇇⌅ˈѪ≲䀓 㿴⁑Ⲵ 䝽䘱䰞仈 Ҷ Ⲵ 䐟DŽ䈕㊫ ⌅ 亶 ㍒ ǃ䇠 㔃 ǃԕ 䀓Ⲵ䟽㓴㔃 䎧 ˈ 䈳 オ䰤䘋㹼 ㍒ˈ⢩ Ⲵ 䘋㹼㓥␡䈅 ˈ䘉ṧ 㜭 Ո䀓䳶ѝ ㍒ˈ 㜭 䐣 䜘 ㍒亶 ˈӾ㘼 䇱Ҷ⿽㗔Ⲵ ṧ ˈ䚯 䲧 䜘 Ոˈ 儈Ҷ Ո䀓Ⲵᾲ⦷DŽ䘁 ˈ䙊⭘ ㇇⌅ 䖳 ˈ ⁑ 䘰⚛㇇⌅ǃ⾱ ㍒㇇⌅ǃ䚇Ր㇇⌅ǃ㲱㗔㇇⌅ǃ㋂ 㗔㇇⌅ǃ⾎㓿㖁㔌ǃ ㇇⌅ㅹ䜭 ⭘ ≲䀓VRPDŽ 㢲 ԓ㺘 Ⲵ䙊⭘ ㇇⌅䘋㹼㔬䘠DŽ˄1˅⁑ 䘰⚛㇇⌅˄Simulated Annealing, SA˅1982 ˈKirkpatrickfㅹ փ䘰⚛ 㓴 Ո 亶 ˈ Ҷа⿽≲䀓 㿴⁑VRPⲴ 䘁լ㇇⌅ˈ ⁑ 䘰⚛㇇⌅˄SA˅DŽSAⓀҾ փ䘰⚛䗷〻Ⲵ⁑ ˈ 䍘к а⿽䲿 Ⲵ ㍒ ⌅DŽ ѝˈSA䟷⭘Metropolis ˈ ⭘а㓴〠ѻѪ 䘋 㺘Ⲵ ㇇⌅䘋〻ˈ ㇇⌅ 亩 䰤䟼㔉 ањ䘁լ Ո䀓DŽо㓿 ㇇⌅∄ˈSA 䘠ㆰǃ ⭘⚥⍫ǃ ⭘ ⌋ 䖳 Ԧ䲀 ㅹՈ⛩ˈⴞ 䇨 Ո 䰞仈ѝ ⭘DŽⴞ ҾSAⲴ⹄ウˈ 㔃 ԆՈ ㆆ⮕ ⌅DŽ Tian[38]ㅹӪ 䙐Ҷа⿽ Ҿ Ո ㆆ⮕ⲴSA㇇⌅ ≲䀓VRPˈ ⭘ ㇇⌅ 䙐 䀓ˈ SAо2-opt㔃 ˈ ㇇⌅ѝ ⭘ 䟽 ˈ 䗮 㓸 ˈṩ Ո Ⲵ 䟽 ㊫ ㇇⌅DŽLi[39]ㅹӪ SAо⾱ ㍒㇇⌅㔃 ˈ ⭘TS㇇⌅ѝⲴ〫ս Ӕ ㇇ 㓯䐟 㓯䐟䰤Ⲵ ˈ㘼 SA Ѫ 〻 ˈṩ Ⲵ Ո䀓 䇮 Ⲵ ˈ ㇇⌅䘋㹼 ㍒DŽTavakkoli-Moghaddam[40]ㅹӪ 䛫䘁㇇⌅оSA㔃 ˈԕ⭘ ≲䀓 䖖 VRP 䴰≲ Ⲵ 䖖 VRPDŽ㜑 Տ[41]ㅹ 䲿 䙐VRP 䀓Ⲵ кˈ㔃 ⁑ 䘰⚛㇇⌅ㆆ⮕ˈ䟷⭘䐟 䰤䈳 䐟 Ո ⌅ˈ 䙏 VRP䘋㹼Ҷ≲䀓DŽ⭡ҾSAⲴ 䙏 䖳 ˈфо Ԇ㇇⌅∄ˈSA н㜭 Ⲵ䀓[42]ˈ ↔ⴞ SA VRPѝⲴ ⭘⋑ ⾱ ㍒㇇⌅ 䚇Ր㇇⌅ ⌋DŽ˄2˅⾱ ㍒㇇⌅˄Tabu Search, TS˅1986 Glover Ҷ⾱ ㍒㇇⌅˄TS˅[43]DŽ Ҿ Ӫ㊫ 〻Ⲵа⿽⁑ ˈTS 䜘亶 ㍒Ⲵа⿽ ˈ а⿽ 䙀↕ Ո㇇⌅ˈ ˖㔉 ањ 䀓˄ 䀓˅ 䘹䀓ӗ⭏ ˄亶 㔃 ˅ˈ 䀓Ⲵ亶 ѝ⺞ 㤕 䘹䀓˗㤕 䘹䀓 Ⲵⴞḷ ՈҾ ⴞ Ѫ→ ㍒ Ⲵ³ 䀓´˄Best-so-for˅ˈ 㿶 ⾱ ⢩ ˈ⭘ ԓ 䀓 ³ 䀓´˗㤕н к䘠 䘹䀓ˈ 䘹䀓䳶ѝ䘹 䶎⾱ Ⲵ 䘹䀓Ѫ Ⲵ 䀓ˈ㘼 㿶 о 䀓ⲴՈ ˗к䘠є⿽ л䜭 Ⲵ 䊑 ⾱ 㺘ˈ ⾱ 㺘ѝ 䊑Ⲵԫ ˗ ↔䟽 к䘠䘝ԓ ㍒䗷〻ˈⴤ㠣┑䏣㓸→ DŽ ԕⴻ ˈ亶 㔃 ǃ 䘹䀓䳶ǃ⾱ 䊑ǃ㰀㿶 ǃ㓸→ ㅹ䜭 TS 㜭Ⲵ 䭞DŽˈWillard[44], Pureza Franca[45] TS ⭘ҾVRPˈն䜭 㜭≲ 䖳 Ⲵ㔃 DŽ Osman WassanⲴTS㇇⌅ѝ[46]ˈ ⭘є⿽ 䀓ӗ⭏ ⌅˖ањ 㢲㓖㇇⌅о ⌅㔃 ˈ ањ 㢲㓖㇇⌅о ⍮⌅㔃 ˗ 䛫 㔃 ањє 䐟 䰤Ⲵ њ 㘵єњ䘎㔝Ⲵ ⛩ⲴӔ ˗ ⾱ 䮯 ⭡ањ 〻 ㍒ 䰤䘋㹼 ѹDŽ⍻䈅㔃 ⽪ˈ䘉є⿽TS ⧠ 䜭 Ҷ䖳 Ⲵ㔃 DŽ1994 ˈGendreau[47] Ҷ㓿 ⲴTaburoute㇇⌅ˈ 亶 㔃 ањ亦⛩Ӿ Ⲵ㓯䐟ѝ ˈ а 㓯䐟ѝˈ㘼䘉 㓯䐟 ⭘ԆԜ Ⲵ≲䀓TSPⲴ ѹ ⌅˄GENI˅ ӗ⭏Ⲵpњ 䛫䘁䀓ѻа˗ Ҿ⾱ ˈ Ӿ 䰤[5, 10]ѝ䲿 ањ ˗ ⭘Ҷа⿽ ṧ ㆆ⮕ˈѪ 㘳㲁䛓Ӌ〫 䖳 Ⲵ亦⛩Ⲵ 㜭 ˈ 䛓Ӌ㓿 㻛〫 Ⲵ亦⛩䘋㹼 㖊˗ ⭘՚䎧⛩ˈ⭏ њ䀓 ⇿ањ䜭䘋㹼 䲀Ⲵ ㍒ˈ❦ 䘹 ѝ 㘵Ѫѫ ㍒䗷〻Ⲵ 䀓˗⍻䈅㔃 㺘 ˈ䈕㇇⌅㜭≲ 儈䍘䟿Ⲵ㔃 ˈф ≲ ⴞ Ѫ→Ⲵ 䀓DŽ1995 ˈRochat Taillard[48] Ҷ㠚䘲 䇠 ˄Adaptive Memory˅ᾲ ˈ 䘁 TS亶 ⧠Ⲵ Ⲵ䘋 ѻаDŽ ㍒䗷〻ѝ ⲴՈ䍘䀓 䎧 ˈ❦ 䙊䗷䘉Ӌ䀓Ⲵ㓴 ˈӗ⭏TSⲴ 䀓DŽањ㠚䘲 䇠 а㓴 њ ㍒䗷〻ѝн Ⲵ 䀓DŽ䘉Ӌ䀓ⲴḀӋ ㍐㻛 ˈ 䘋㹼н Ⲵ㓴 ԕӗ⭏ Ⲵ 䀓DŽ VRPѝˈӾ њ䀓ѝ 䘹 Ⲵ䖖䖶㓯䐟 㻛⭘ Ѫањ䎧⛩DŽ䘉њ ⌅ 㓿 ԆԜ 14њḷ VRP⍻䈅䰞仈ѝˈ≲ Ҷєњ ⴞ Ѫ→Ⲵ 䀓DŽ1998 ˈToth Vigo[49] Ҷа⿽ ⌋䘲⭘㤳 Ⲵㆋ㖁⾱ ㍒˄Granular Tabu Search, GTS˅DŽGTSⲴѫ㾱 ⓀҾ˖ањ ѝ䖳䮯Ⲵ䗩㻛 ањ Ո䀓ѝⲴ 㜭 DŽ ↔ˈ䙊䗷⎸ 䮯 䎵䗷ањ䟿 ˄Granularity˅Ⲵ Ⲵ䗩ˈ аӋ⋑ 䙄Ⲵ䀓 ㍒䗷〻ѝ н 㘳㲁DŽ㔃 㺘 ˈ GTS㜭 ⸝Ⲵ 䰤 ≲ Ⲵ䀓DŽ䘁 ˈBrandao[50] 䇮䇑ⲴTSѝˈ䛫 㔃 䘹䀓䳶 ⭡ ˈ ⭘Ҷй⿽〫 ˈ 䐟 䰤 ⛩ ǃ䐟 䰤 ⛩Ӕ ǃ䐟 ⛩Ӕ DŽ⾱ 䮯 ⭡[N/6ˈN/2]ѻ䰤Ⲵ䲿 ˈ ⭘ Ⲵ[N/3] Ѫ⾱ 䮯 䘋㹼 傼⭘ԕ ∄DŽBrandao Eglese[51]䇮䇑Ⲵ≲䀓 䐟 Ⲵ⾱ ㍒㇇⌅ѝˈԕ5⿽ ⌅㧧 䀓ˈ 䘹 ԧ䗩ǃ䘹 䍥䗩ǃ ǃ䘎 䗩 亦⛩(Connected Components)ǃ䐟 (Path Scanning)˗ 䛫 㔃 䗩 ǃ 䗩 є 䐟 кⲴ䗩Ӕ DŽ⭡ҾTS㇇⌅ 䀓 Ⲵ 䎆 ˈ 㘵ԕSolomon ⌅ Ѫ ㇇⌅ˈҏ 䟷⭘ ⌅ǃл ㇇⌅ǃK-tree㇇⌅ӗ⭏ 䀓DŽⴞ ˈTS 䖖VRPǃ 〻䖭䍗VRPǃ 䰤デ㓖 ⲴVRPǃԕ VRP䜭 䟿 ⭘DŽ˄3˅䚇Ր㇇⌅˄Genetic Algorithms, GA˅1975 ˈHolland[52] Ҷ䚇Ր㇇⌅˄GA˅DŽGA а⿽⁑ԯ⭏⢙䘋 䗷〻Ⲵ 䲿 ㍒ ⌅ˈ Ѫ˖ӾՈ 䰞仈Ⲵањ⿽㗔˄а㓴 㹼䀓˅ ˈ ➗䘲㘵⭏ Ո㜌 ⊠Ⲵ ⨶ˈ䙀ԓ˄Generation˅╄ ӗ⭏ 䎺 䎺 Ⲵањ⿽㗔˄а㓴 㹼䀓˅˗ ⇿аԓˈṩ њփ˄ 㹼䀓˅Ⲵ䘲 ˄ⴞḷ ˅ⲴՈ 䘹а䜘 Ո㢟њփ ˄㑱⇆˅ лаԓˈ 䘋㹼Ӕ ˈӗ⭏ ԓ㺘 Ⲵ䀓䳶 Ⲵ⿽㗔DŽ䘉њ䗷〻 㠤⿽㗔 㠚❦䘋 аṧⲴ ԓ⿽㗔∄⡦ԓ 䘲 Ҿ⧟ ˄ 㹼䀓∄ 㹼䀓 䘁䰞仈Ⲵ Ո䀓˅ˈ њ䘋 䗷〻ѝⲴ Ոњփ Ѫ䰞仈Ⲵ 㓸䀓DŽҾн ㊫ Ⲵ䰞仈ˈ օ䇮䇑а⿽ 㖾Ⲵ㕆⸱ Ṹаⴤ GAⲴ ⭘䳮⛩ѻаˈҏ GAⲴањ䟽㾱⹄ウ DŽҼ䘋 㕆⸱ ⌅ GAѝ ⭘Ⲵа⿽㕆⸱ ⌅ˈ❦㘼ˈ Ҿ≲䀓VRP䘉ṧⲴ 䰞仈 ˈҼ㓗 㕆⸱ а Ⲵ㕪䲧DŽ ↔ˈㅖ 㕆⸱ ⌅ ⌋䇔 DŽն ㅖ 㕆⸱ ⌅ ˈ 㔉GA Ҷ Ⲵ䰞仈ˈ㤕䟷 ㆰ Ӕ Պ ԓ㓯䐟ѝ Ӌ亦⛩䟽 ˈ аӋ亦⛩㻛䚇┿ˈ 㠤 㜭 䙽 亦⛩Ⲵ䶎⌅㓯䐟DŽ ↔ˈ 享 у䰘Ⲵ Ҿ亪 ⲴӔ ӗ⭏ Ⲵ ԓ DŽ䘁 㓿 Ҷ л ⌅[5]˖䜘 䝽Ӕ ⌅˄Partially Matched Crossover, PMX˅ǃ亪 Ӕ ⌅˄Order Crossover, OX˅ǃ ⧟Ӕ ⌅˄Cycle Crossover, CX˅ˈԕ 䗩䟽㓴Ӕ ⌅˄Edge Recombination Crossover, ERC˅DŽ Ҿ ˈҏ 㓿 ҶаӋу䰘Ⲵ ⌅ˈ ˄Remove and Reinsert˅ǃ ˄Swap˅ˈԕ 䘶䖜 ˄Inversion˅DŽⴞ ˈ≲䀓VRP OVRPⲴGA ⥞ 䖳 ˈ㘼≲䀓 䰤デⲴVRP ㅹ ⲴGA ⥞ 䖳 DŽ Ⲵ䲀 Ԧˈ⢩ 䰤デⲴ ˈаⴤ ⢥ ⵰ Ⲵ≲䀓 ⌅Ⲵ DŽ䘉㔉GA⭘ Ԉ 䲀 Ԧ 䶒Ⲵ ≲ ㄎҹ Ⲵ㔃 Ҷ ՊDŽ˄4˅㲱㗔㇇⌅˄Ant Colony Optimization, ACO˅㲱㗔㇇⌅ ⭡Dorigo, M., ㅹ[53]Ҿ1991 俆⅑ ⲴDŽACO 㠚❦⭼ѝⵏ 㲱㗔㿵伏㹼ѪⲴ 㘼 Ⲵа⿽⁑ 䘋 ㇇⌅DŽ 伏⢙ ˈ㲲㲱Պ 㓿䗷Ⲵ䐟 䙊䗷 а⿽ ◰㍐˄pheromoneˈ ㇇⌅ѝ〠Ѫ ㍐˅ ḷ䇠ˈ Ⲵ䟿 ṩ 䐟 䮯 伏⢙Ⲵㅹ㓗 DŽ䘉Ӌ ◰㍐Ѫ 㲲㲱 ˈ Ԝ 䘀伏⢙DŽⴞ ˈACO ⭘Ҿ ㊫VRPDŽBullnheimerㅹ[54]䪸 VRP䇮䇑Ҷу䰘Ⲵ㲱㗔䖜〫䘹 ㆆ⮕ˈ 㲱㗔 ㍒ ˈ ⭘2-OptՈ 䐟 ˗Gambardellaㅹ[55] ACO⭘Ҿ≲䀓VRPTWˈ 㘵䟷⭘єњ⿽㗔 Ո 䰞仈ˈањՈ 䖖䖶 ⴞˈањՈ 㓯䐟䮯 ˗Donatiㅹ[56] ACO⭘Ҿ 㖁㔌VRPˈ ㇇⌅ѝ ㍐ ѹѪањ 䰤 䎆䟿ˈ а 〻 к䀓 Ҷ 䰤デⲴ 㖁㔌VRP˗Montemanniㅹ[57]⹄ウҶACO 䖖䖶䐟 䰞仈Ⲵ ⭘ˈ Ҷањ⭡һԦ㇑⨶ǃ㲱㗔㇇⌅ǃ ㍐ ㆆ⮕3њ ㍐㓴 Ⲵ㌫㔏Ṷ ˗Pellegrini ㅹ[58]⹄ウҶн 䖖䖶ǃ 䖖 ǃ 䰤デㅹ㓖 ⲴVRPˈ ⭘2⿽ ⿽ACOՈ ≲䀓˗Gajpal Abad[59]ԕ㋮㤡㲲㲱 䐟 ㆆ⮕Ⲵ㲱㗔㌫㔏≲䀓Ҷ 䘱 ъⲴVRP˗Ugur Aydin[60] ҾACO ҶањӪ ӔӂTSP ⁑ 䖟ԦDŽ˄5˅ ㇇⌅а䙊⭘ ㇇⌅⹄ウ␡ Ⲵ ˈ⹄ウӪ 㓿䖳 ⿽ аⲴ ㇇⌅㔃 䎧 ˈԕ 儈VRPⲴ≲䀓䙏 䀓Ⲵ䍘䟿DŽ1995 ˈGloverㅹ[61] 䈅 GA TS㔃 ˗䛾㤲⾕ 㜑 㔗[62]䙊䗷 䜘 ㍒㜭 Ⲵ⡜ ㇇⌅о ㍒㜭 Ⲵ䚇Ր㇇⌅㔃 ˈ 䙐Ҷ≲䀓⢙⍱䝽䘱䐟 Ո 䰞仈Ⲵ 䚇Ր㇇⌅ˈ 㢟 Ո㔃 ˗䛡 ẵ[63]ˈ[64] ⹄ウҶ㋂ 㗔㇇⌅о Ԇ㇇⌅Ⲵ㔃 VRP 䰞仈кⲴ ⭘˗б⿻䴧[65]ㅹ ⚮ ㇇ 㲱㗔㇇⌅ 䲧 䜘Ո Ⲵ㕪䲧˗Saez[66]ㅹ 䚇Ր㇇⌅о⁑㋺㚊㊫㔃 ˈ ↔ к Ҷа⿽ 㜭䘲 亴 ⌅≲䀓 䖖䖶 䘱 ъVRPDŽ㔬к 䘠ˈ ≲䀓VRPⲴ ⿽䙊⭘ ㇇⌅ ㇇⌅Ⲵ⹄ウ㺘 ˈ Ҿ Ⲯњ Ⲵ ˈ䘉Ӌ ⌅ѝ䜭 ԕ≲ 䶎 Ⲵǃ ⭊㠣 ՈⲴ䀓ˈ㲭❦䘀㇇ 䰤㾱䮯аӋDŽ փ 䈤ˈ ⴞ Ѫ→ˈ⾱ ㍒ ⧠ Ⲵ ⌅˗ Ҿ䚇Ր㇇⌅ ⾎㓿㖁㔌Ⲵ ⌅ 㜭Ո㢟˗㘼 Ҿ⁑ 䘰⚛ 㲱㗔㌫㔏Ⲵ ⌅ㄎҹ н DŽ❦㘼ˈ㘳㲁 ⿽ ⌅ 䙀⅑ ⧠ѝⲴ 㜭 䘋 ˈ ⿽ ㇇⌅ 䳶ѝ ㍒ ṧ ㍒ǃ ㇇⌅≲䀓䍘䟿 䇑㇇ 䰤ѻ䰤㜭㧧 䖳 Ⲵ 㺑ˈ Ⲵ㲱㗔㌫㔏 䚇Ր㇇⌅ 㻛 ˈ о⾱ ㍒㇇⌅ 㖾DŽ4. 㔉 䈣䖖䖶䐟 䰞仈 ㇑⨶ 䘀ㆩ 亶 䱄Ⲵ ⭘ԧ ⹄ウ DŽ䲿⵰⽮ՊⲴ ˈVRPҏ н Ⲵ ˈ 䲿 䴰≲VRPǃ䶎 〠㖁㔌VRPǃԃ -䝽䘱аփ 䐟 䰞仈ㅹ 䘋а↕⹄ウⲴ DŽ 㓣 㔃ҶVRP Ⲵ⹄ウ䘋 䎻 ˈѪ Ⲵ 䢤DŽ㘳 ⥞[1] 䶙 , 㔏䇑 , ѝ ⢙⍱о䟷䍝㚄 Պ. 2010 ⢙⍱䘀㹼 䙊 [M]. ѝ ⢙⍱о䟷䍝㚄 Պ, ѝ ⢙⍱ 䢤2011, Ӝ: ѝ ⢙䍴 ⡸⽮, 2011: 61-62[2] Dantzig, G.B., and Ramser, J.H., The truck dispatching problem [J].Management Science, 1959, 6: 80[3] ⇥仾 . 䖟 䰤デ㓖 Ⲵ 䖖䖶䐟 䰞仈⹄ウ ⭘[D]. 䮯⋉: ѝ , 2009[4] █・ . 䰤デ䖖䖶䐟 䰞仈 ㇇⌅⹄ウ[D]. 䮯⋉: ѝ , 2012[5] ㅖ . 䖖䖶䐟 䰞仈 ⭘⹄ウ[D]. 䮯⋉: ѝ , 2004[6] █・ , ㅖ . ≲䀓 ⺜ 䰤デ䖖䖶䐟 䰞仈Ⲵ ㇇⌅[J]. 䇑㇇ ⭘, 2012, 32(11): 3042-3043, 3070[7] 㛆䳱, ㅖ , 㛢 . 䖟 䰤デⲴ䖖䖶䐟 䰞仈 ⭘ 䇘[C]. 䮯⋉: ѝ 䘀ㆩ ՊㅜӔ⍱Պ, 2000: 634-638[8] ㅖ , 㙲䶆. 䖖䖶䐟 䰞仈 㤕 ⹄ウ䘋 [C]. ␡ : ѝ 䘀ㆩ Պㅜ Ӕ⍱Պ, 2006:395-400[9] Bodin, L.B., Golden, B.L., Assad, A.A., Ball, M.O., Routing and scheduling of vehicles and crews: the state ofthe art [J]. Computer Operation Research, 1983, 10: 163-211[10] Toth, P., Vigo, D. The Vehicle Routing Problem [M]. Society for Industrial and Applied Mathematics,Philadelphia, USA, 2002[11] 㛆 䖹. 䖖䖶䐟 Ո ⥞㔬䘠[J]. ь 㤳 䲒 ˄㠚❦、 ˅, 2010, 2: 31-37[12] Crevier, B., Cordeau, J.F., LaPorte, G., The multi-depot vehicle routing problem with inter-depot routes [J].European Journal of Operational Research, 2007, 176(2): 756-773[13] Golden, B., Assad, A., Levy, L., The fleet size and mix vehicle routing problem [J]. Computer and OperationsResearch, 11(1): 49-66[14] Drorand, M., Trudeau, P. Split delivery routing [J]. Naval Research Logistics, 1990, 37: 383-402[15] 䉒⿹. 䲿 䖖䖶䐟 䰞仈⹄ウ[D]. 䜭: 㾯 Ӕ䙊 , 2003[16] Bent, R.W., and Hentenryck, P.V., Scenario-Based Planning for Partially Dynamic Vehicle Routing withStochastic Customers [J]. Operations Research, 2004, 52(6): 977-987[17] Oppen, J., L okketangen, A., Arc routing in a node routing environment [J]. Computers and OperationsResearch, 2006, 33(4): 1033-1055[18] Lenstra, J.K., and Rinnooy, K., Complexity of vehicle routing and scheduling problem [J]. Network, 1981, 11:221-227[19] . Ҿ ⭼䲀⌅Ⲵ 㹼 ㍒㇇⌅⹄ウ[D]. 㾯 : 㾯 ⭥ 、 , 2011[20] Տ. а⿽ Ҿ䀓 ѝ 䶒Ⲵ ㊫㇇⌅[D]. 䘎: 䘎⨶ , 2009[21] . CVRP 䝽㖁㔌⍱㇇⌅[D]. ⍾ : ь、 , 2003[22] 㕚 㣜, 䛥 . 㿴 ㇇⌅Ⲵ ⨶ ⭘[J]. ѝ 、 , 2005(21): 42-42[23] Golden, B.L., Wasil, E.A., Kelly, J.P., and Chao, I.M., Meatheuristics in vehicle routing [C]. In Crainic, T.G.,and Laporte, G. editors, Fleet Management and Logistics, Kluwer Academic Publishers, London, 1998, 33-56 [24] Clark, G. and Wright, J.R., Scheduling of vehicle routing problem from a central depot to a number ofdelivery points [J]. Operations Research, 1964, 12: 568-581[25] Nelson, M.D., Nygard, K.E., Griffin, J.H., and Shreve, W.E., Implementation techniques for the vehiclerouting problem [J]. Computer and Operations Research, 1985, 12(3): 273-283[26] Paessens, H., The savings algorithm for the vehicle routing problem [J]. European Journal of OperationalResearch, 1988, 34(3): 336-344[27] Altinkemer K., Gavish B., Parallel savings based heuristic for the delivery Problem [J]. Operations Research,1991, 39: 456-469[28] Wark, P., and Holt, J., A repeated matching heuristic for the vehicle routing problem [J]. Journal ofOperational Research Society, 1994, 45: 1156-1167[29] Gillett, B.E., and Miller, L.R., A heuristic algorithm for the vehicle dispatch problem [J]. Operations Research,1974, 22: 340-349[30] Foster, B., and Ryan, D., An integer Programming approach to the vehicle scheduling problem [J]. OperationResearch, 1976, 27: 307-384[31] Ryan, D.M., Hjorring, C., and Glover, F. Extension of the Petal method for vehicle routing [J]. Journal ofOperational Research Society, 1993, 44: 289-296[32] Cordeau, J.F., Gendreau, M., Laporte, G., Potvin, J.Y., and Semet, F., A guide to vehicle routing heuristics [J].Journal of Operational Research Society, 2002, 53(5): 512-522[33] Christofides, N., Mingozzi, A., and Toth, P., The vehicle routing problem [C]. Combinatorial optimization,Chichester, UK: Wiley, 1979: 315-338[34] Fisher, M.L., Jaikumar, R., A generalized assignment heuristic for vehicle routing [J]. Network, 1981, 11:109-124[35] Fisher, M.L., Greenfield, A.J., Jaikumar, R., and Lester, J., A computerized vehicle routing application [J].Interfaces, 1982, 12(4): 42-52[36] Fisher, M.L., Jaikumar, R., and Wassenbove, L.N., Multiplier adjustment method for the generalizedassignment problem [J]. Management Science, 1986, 32: 1095-1103[37] Bramel, J.B., and Simchi-Levi, D., A location based heuristic for general routing problems [J]. OperationsResearch, 1995, 43(4): 649-660[38] Tian, P., Ma, J., and Zhang, D.M., Application of the simulated annealing algorithm to the combinatorialoptimization problem with permutation property: an investigation of generation mechanism [J].European Journal of Operational Research, 1999, 118(1): 81-94[39] Li, H., Lim, A., Huang, J., Local search with annealing-like restarts to solve VRPTW [J]. European Journal ofOperational Research, 2003, 150(1): 115-127[40] Tavakkoli-Moghaddam , R. Safaei, N., Gholipour, Y., A hybrid simulated annealing for capacitated vehiclerouting problems with the independent route length [J]. Applied Mathematics and Computation, 2006, 176(2): 445-454[41] 㜑 Տ, , 㜑 . 䖖䖶䐟 䰞仈Ⲵ⁑ 䘰⚛㇇⌅[J]. ѝ 䐟 , 2006, 19(4): 123-126[42] Breedam, A.V., Improvement heuristics for the vehicle routing problem based on simulated annealing [J].European Journal of Operation Research, 1995, 86(3): 480-490[43] Glover, F. Future paths for integer programming and links to artificial Intelligence [J]. Computers andOperations Research, 1986, 13:533-549[44] Willard, J.A.G., Vehicle routing using r-optimal tabu search [M]. London: The Imperial College, 1989[45] Pureza, V.M., and Franca, P.M., Vehicle routing problems via tabu search metaheuristic [R].Technical ReportCRT-347, Centre for Research on Transportation, Montreal, Canada, 1991[46] OsmanˈI., and Wassan, N., A reactive tabu search metaheuristic for the vehicle routing problem with back-hauls [J]. Journal of Scheduling, 2002, 5(4): 263-285[47] Gendreau, M., Hertz, A., L aporte, G., A tabu search heuristic for the vehicle routing problem [J].Management Science, 1994, 40: 1276-1290[48] Rochat, Y., and Taillard, E.D., Probabilistic diversification and intensification in local search for vehiclerouting [J].Journal of Heuristics, 1995, 1: 147-167[49] Toth, P., and Vigo, D., The granular tabu search and its application to the vehicle routing problem[R].Technical Report OR19819, DEIS, Italy, 1998[50] Brandao, J., A new tabu search algorithm for the vehicle routing problem with backhauls [J]. EuropeanJournal of Operation Research, 2006, 173(2): 540-555[51] Brandao, J., and Eglese, R., A deterministic tabu search algorithm for the capacitated arc routing problem [J].Computers and Operations Research, 2008, 35(4): 1112-1126[52] Holland, J., Adaptation in natural and artificial systems [D]. University of Michigan Wesley, 1975[53] Colorni, A., Dorigo, M., Maniezzo, V., Distributed optimization by ant colonies [J]. In: Proc of the FirstEuropean Conference of Artificial Life. Paris, France Elsevier Publishing, 1991: 134-142[54] Bullnheimer, B., Hartl, R.F., and Strauss, C., Applying ant system algorithm to the vehicle routing problem[A]. Advances and Trends in Local Search Paradigms for Optimizaiton [C], Kluwer Acedenics, 1998: 109-120[55] Gambardella, L.M., Taillard, E., Agazzi, G., MACS-VROTW: a multiple ant colony system for vehiclerouting problems with time window [A]. New ides in optimization [C], London, U.K.: McGraw-Hill, 1999: 63-76[56] Donati, A.V., Montemanni, R., Casagrande, N., Rizzoll, A.E., and Gambardella, L.M., Time dependentvehicle routing problem with a multi ant colony system [R]. Technical Report TR-17-03, IDSIA, Galleria2, Manno, 6928, Switzerland, 2003[57] Montemanni, R., Gambardella, L.M., Rizzoll, A.E., and Donati, A.V., A new algorithm for a dynamic vehiclerouting problem based on ant colony system [R]. Technical Report TR-23-02, IDSIA, Galleria2, Manno, 6928, Switzerland, 2004[58] Pellegrini, P., Favaretto, D., Moretti, E., Multiple ant colony optimization for a rich vehicle routing problem:a case study [J]. Lecture Notes in Computer Science, 2007, 4639: 627-634[59] Gajpal, Y., and Abad, P.L., Multi-ant colony system (MACS) for a vehicle routing problem with backhauls[J]. European Journal of Operation Research, 2009, 196: 102-117[60] Ugur, A., and Aydin, D., An interactive simulation and analysis software for solving TSP using ant colonyoptimization algorithms [J]. Advances in Engineering Software, 2004, 40: 341-349[61] Glover, F., Kelly, J.P., and L aguna, M., Genetic algorithms and tabu search: hybrids for optimization [J].Computers Operation and Research, 1995, 22(1): 111-134[62] 䛾㤲⾕, 㜑 㔗. ⭘ 䚇Ր㇇⌅≲䀓⢙⍱䝽䘱䐟 Ո 䰞仈Ⲵ⹄ウ[J]. ѝ ㇑⨶、 , 2002, 10(5): 51-56[63] 䛡 , ẵ. Ҿ 䘋㋂ 㗔㇇⌅Ⲵ ս-䘀䗃䐟㓯䰞仈⹄ウ[J].ѝ Ỡ 〻, 2006, 17(22):2359-2361[64] . 䖖䖶䐟 䰞仈Ⲵ㋂ 㗔㇇⌅⹄ウо ⭘[D]. ⎉⊏: ⎉⊏ ъ , 2007[65] б⿻䴧, 㜑⾕ , ≨ . ≲䀓 䰤デⲴ䖖䖶䐟 䰞仈Ⲵ 㲱㗔㇇⌅[J]. ㌫㔏 〻⨶䇪о 䐥, 2007,10: 98-104[66] Saez, D., Cortes, C.E., and Nunez, A., Hybrid adaptive predictive control for the multi-vehicle dynamic pick-up and delivery problem based on genetic algorithms and fuzzy clustering. Computers and Operations Research, 2008, 35: 3412-3438。