北京大学出版社理论力学部分习题解答
理论力学课后习题答案第6章刚体的平面运动分析
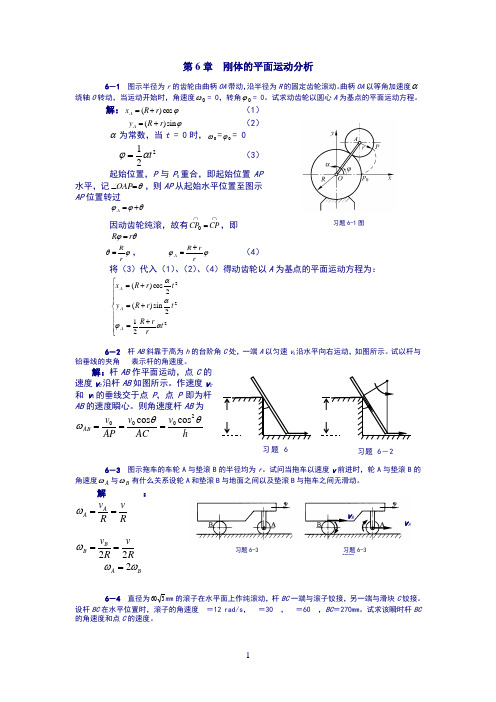
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕcos )(r R x A += (1) ϕsin )(r R y A += (2) α为常数,当t = 0时,0ω=0ϕ= 0 221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R =ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为hv AC v AP v ABθθω2000cos cos ===6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:R v R v A A ==ωR v R v B B 22==ω B A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度=12 rad/s ,=30,=60,BC =270mm 。
北京大学理论力学讲义 introduction

13
第三章、 小振动(5学时) §1、小振动体系的运动方程
§2、小振动的解 §3、简正坐标 §4、例题:耦合摆 §5、质点组的动能
第四章、 刚体运动学(4学时) §1、直角坐标系下的3维张量 §2、刚体的定点运动 §3、刚体的一般运动 §4、刚体运动的特殊情形 §5、无穷小转动的矩阵形式 §6、 Euler 运动学方程
ftp:///pub/liuchuan/mech.pdf (3) 胡慧玲、林纯镇、吴惟敏,理论力学基础教程,
高等教育出版社,1986. (4) 苏云荪,理论力学,高等教育出版社,
1990年6月出版. (5) 梁昆淼编,俞超、马光群修订,力学(下册),
3rd ed., 高等教育出版社, 1995年5月出版.
2
陈晓林的联系方式
办公室:物理楼中224, 62751730
Email chenxl@
3
助教的联系方式
张琛 物理楼北167 ? 13718956953 Email: zhangchen895@
高永凤 ?15652969735 Email:yfgao03@
F
我们用r 或 r 表示矢量,2者混用,
r
F为作用力, 最基本的矢量方程是
F =m r 。
O
这里 r d 2r / dt2 为质点的加速度。
这部分内容主要建立者是 Galileo (1564-1642),
7
特别是
Isaac Newton (1642-1727)
1687
自然哲学的数学原理
8
(2)分析力学 在18、19世纪,由数学家、物理学家J. L. Lagrange
《理论力学》课程教学大纲72

《理论⼒学》课程教学⼤纲72《理论⼒学》课程教学⼤纲⼀、课程的基本情况课程中⽂名称:理论⼒学课程英⽂名称:Theoretical Mechanics课程代码:0701017课程类别:专业基础课课程性质:必修课总学时:72 讲课学时:72 实验学时:0课程学分:4授课对象:机械类及相近专业本科学⽣前导课程:⾼等数学⼆、教学⽬的理论⼒学为⼯程类学科的基础课程之⼀。
理论⼒学教育不仅可以培养学⽣的⼒学素质,⽽且可以加强学⽣的⼯程概念。
这对于他们向其他学科或其他⼯程领域扩展是很有利的。
是相关专业后续课程的理论和设计以及⼯程设计规范的基础。
通过理论⼒学的学习可以使学⽣了解刚体的特性及其研究⽅法;了解理论⼒学基本理论以及在⼯程实际中的应⽤;了解理论⼒学与其他相关课程的联系。
三、教学基本要求绪论0.1理论⼒学的研究对象0.2理论⼒学的发展简史0.3理论⼒学的内容和研究⽅法0.4理论⼒学的应⽤及和其他学科的关系基本要求:1.了解理论⼒学的研究对象和内容。
2.了解理论⼒学与其他课程的关系。
3.了解理论⼒学在各个不同领域的应⽤。
重点与难点:1.理论⼒学的内容和研究⽅法。
第⼀部分静⼒学第1章静⼒学公理和物体的受⼒分析1.1静⼒学公理1.2约束和约束⼒1.3物体的受⼒分析和受⼒图基本要求:1.深⼊地理解⼒、刚体、平衡和约束等重要概念,深⼊理解⼒的基本性质。
2.明确基本约束的特征,正确地对物体系统进⾏受⼒分析。
重点与难点:1.约束和物体系的受⼒分析。
2.物体系统的受⼒分析和受⼒图。
第2章平⾯汇交⼒系与平⾯⼒偶系2.1平⾯汇交⼒系合成与平衡⼏何法2.2平⾯汇交⼒系合成与平衡的解析法2.2平⾯⼒对点之矩概念及计算2.3平⾯⼒偶基本要求:1.清晰的理解汇交⼒系和⼒偶系的合成。
2.熟练解汇交⼒系的平衡问题。
3.清晰的理解⼒对点的矩,并能熟练的计算。
4.深⼊理解⼒偶和⼒偶矩的概念。
明确⼒偶的性质和⼒偶的等效条件。
重点与难点:1.汇交⼒系的平衡⽅程。
理论力学课后答案-谢传峰、王琪-动力学第九章、第十章
1 2
2l m dx(
x sin )2 0 2l
2 ml 2
2 sin2 3
O C
系统的动能 T T1 T2 。 取 900 为势能零点,则系统的势能为:
V mgl cos
则拉格朗日函数:
L T V 2 ml2 (2
2 sin2 ) mgl cos 3
x
楔块 B 的速度 vB ,以及 B 相对于 A 的相对速度
满足如下的矢量关系(方向如图所示):
vB vA vBr
系统的动能为:
vBr vA
T
1 2
m
Av
A
2
1 2
mBvB 2
P1 2g
x 2
P2 2g
[(x
s cos)2
(ssin)2 ]
1 2g
(P1
P2 )x 2
度
转动。物体的质心 G 在垂直于 O1O2 的直线上,O3G l 。设 O1O2 和 O3G 是物体过 O3
点的惯量主轴,转动惯量为 J1 和 J 2 ,物体对另一过 O3 点的惯量主轴的转动惯量为 J 3 ,试
求物体的动能表达式并建立物体的运动微分方程。 解:
以该物体为研究对象,有一个自由度,取 O3G 和 OC 的夹角 为广义坐标。若以框架 O1O2OC 为动系,则物体的相对运动是以角速度 绕轴 O1O2 的定轴转动,牵连运动是以角 速度
垂直于 O1O2 的平面
z’
O3
θ G
y’
坐标系 O3 x y z 的三个坐标轴为过 O3 点的三个惯量主轴,则系统的动能为:
T
第1章部分习题解答理论力学 金尚年第二版【VIP专享】
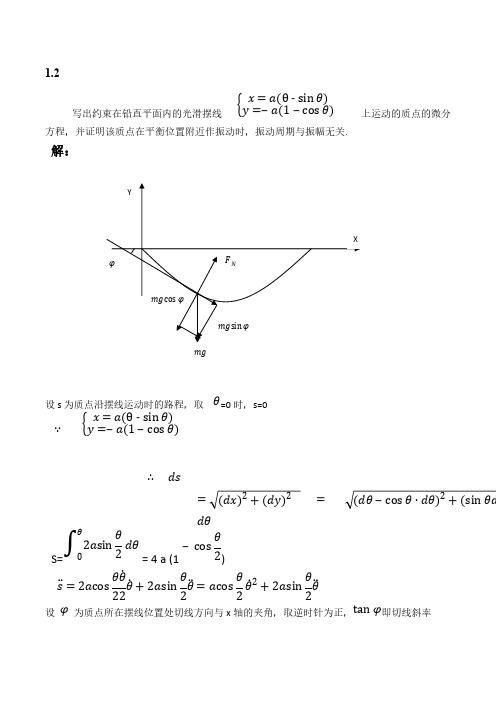
1.2写出约束在铅直平面内的光滑摆线上运动的质点的微分{x =a(θ-sin θ)y =‒a(1‒cos θ)方程,并证明该质点在平衡位置附近作振动时,振动周期与振幅无关.解:设s 为质点沿摆线运动时的路程,取=0时,s=0θ∵{x =a(θ-sin θ)y =‒a(1‒cos θ)∴ ds=(dx )2+(dy )2 = (dθ‒cos θ∙dθ)2+(sin θddθS== 4 a (1)∫θ02a sin θ2 dθ ‒ cosθ2s =2a cos θ2θ2θ+2a sin θ2θ=a cos θ2 θ2+2a sin θ2θ设 为质点所在摆线位置处切线方向与x 轴的夹角,取逆时针为正,即切线斜率φtan φ=tan φ=dy dx =cos θ ‒1sin θ∴ sin φ ‒cosθ2 受力分析得:ms =‒mg sin φ=mg cosθ2则,此即为质点的运动微分方程。
2a sin θ2θ+a cos θ2 θ2=g cosθ2s =g4a (s ‒4a)∴ (s ‒4a)+g4a (s ‒4a )=0∴s ‒4a 一周期性变化的函数,周期T =2π4ag该质点在平衡位置附近作振动时,振动周期与振幅无关,为.2π4a g1.3证明:设一质量为m 的小球做任一角度的单摆运动0θ运动微分方程为θθθF r r m =+)2(①θθsin mg mr = 给①式两边同时乘以d θθθθθd g d r sin = 对上式两边关于积分得 ②θc g r +=θθcos 212利用初始条件时故 ③0θθ=0=θ 0cos θg c -=由②③可解得 0cos cos 2-θθθ-∙=lg 上式可化为dt d lg=⨯-∙θθθ0cos cos 2-两边同时积分可得θθθθθθθθd g l d g l t ⎰⎰---=--=02222002sin 12sin 10012cos cos 12进一步化简可得θθθθd g l t ⎰-=0002222sin sin 121由于上面算的过程只占整个周期的1/4故⎰-==02022sin2sin124T θθθθd g l t 由ϕθθsin 2sin /2sin 0=两边分别对微分可得θϕϕϕθθθd d cos 2sin 2cos 0=ϕθθ202sin 2sin 12cos-=故ϕϕθϕθθd d 2020sin 2sin 1cos 2sin 2-=由于故对应的00θθ≤≤20πϕ≤≤故ϕϕθϕθϕθθθθπθd g l d g l T ⎰⎰-=-=22022cos 2sinsin 2sin 1/cos 2sin42sin2sin 20故其中⎰-=2022sin 14πϕϕK d g l T 2sin022θ=K 通过进一步计算可得gl π2T =]2642)12(531(4231(21(1[224222 +⨯⨯⨯⨯-⨯⨯⨯⨯++⨯⨯++nK n n K K 1.5解:如图,在半径是R 的时候,由万有引力公式,对表面的一点的万有引力为, ①F =GMmR 2M 为地球的质量;可知,地球表面的重力加速度 g , x 为取地心到无限远的广义坐标,,②md 2xdt 2=mg =F联立①, ②可得:,M 为地球的质量;③g =GMR 2当半径增加 ,R2=R+ ,此时总质量不变,仍为M,∆R ∆R 此时表面的重力加速度 可求:g '④md 2xdt2=mg '=F 2=G MmR 22由④得:⑤g '=GMR 22=GM(R +∆R )2则,半径变化后的g 的变化为⑥∆g =g ‒g '=GMR2‒GM(R +∆R )2对⑥式进行通分、整理后得:⑦∆g =GM R 2∆R 2+2∆RR(R +∆R )2对⑦式整理,略去二阶量,同时远小于R ,得∆R ⑧∆g =g2∆R RR 2=g2∆RR 则当半径改变 时,表面的重力加速度的变化为:∆R 。
理论力学习题及解答1
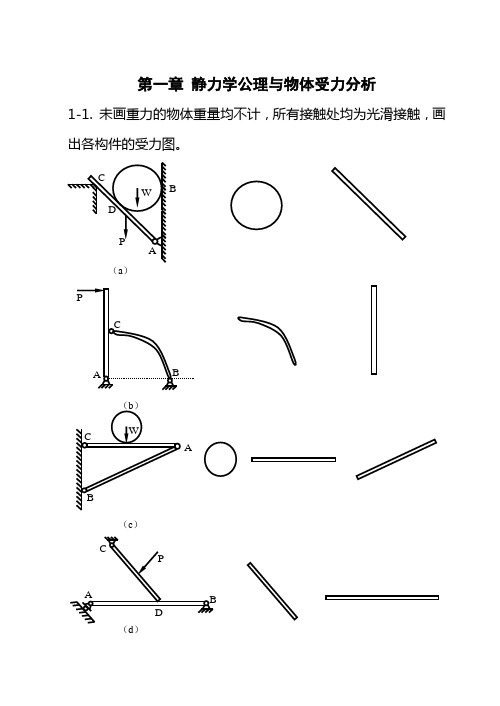
理论力学习题及解答第一章静力学的基本概念及物体的受力分析1-1 画出指定物体的受力图,各接触面均为光滑面。
1-2 画出下列指定物体的受力图,各接触面均为光滑,未画重力的物体的重量均不计。
1-3 画出下列各物体以及整体受力图,除注明者外,各物体自重不计,所有接触处均为光滑。
(a) (b)(c) (d)(e) (f)第二章平面一般力系2-1 物体重P=20kN,用绳子挂在支架的滑轮B上,绳子的另一端接在铰车D 上,如图所示。
转动铰车,物体便能升起,设滑轮的大小及滑轮转轴处的摩擦忽略不计,A、B、C三处均为铰链连接。
当物体处于平衡状态时,试求拉杆AB和支杆CB所受的力。
2-2 用一组绳悬挂重P=1kN的物体,求各绳的拉力。
2-3 某桥墩顶部受到两边桥梁传来的铅直力P1=1940kN,P2=800kN及制动力T=193kN,桥墩自重W=5280kN,风力Q=140kN。
各力作用线位置如图所示,求将这些力向基底截面中心O简化的结果,如能简化为一合力,试求出合力作用线的位置。
2-4 水平梁的支承和载荷如图所示,试求出图中A、B处的约束反力。
2-5 在图示结构计算简图中,已知q=15kN/m,求A、B、C处的约束力。
2-6 图示平面结构,自重不计,由AB、BD、DFE三杆铰接组成,已知:P=50kN,M=40kN·m,q=20kN/m,L=2m,试求固定端A的反力。
图2-6 图2-72-7 求图示多跨静定梁的支座反力。
2-8 图示结构中各杆自重不计,D、E处为铰链,B、C为链杆约束,A为固定端,已知:q G=1kN/m,q=1kN/m,M=2kN·m,L1=3m,L2=2m,试求A、B、C 处约束反力。
图2-8 图2-92-9 支架由两杆AO、CE和滑轮等组成,O、B处为铰链,A、E是固定铰支座,尺寸如图,已知:r=20cm,在滑轮上吊有重Q=1000N的物体,杆及轮重均不计,试求支座A和E以及AO杆上的O处约束反力。
理论力学(金尚年-XXX编著)课后习题答案详解

理论力学(金尚年-XXX编著)课后习题答案详解高等教育出版社的《理论力学课后题答案》一书中,第一章包含了以下三个问题的解答:1.2 题目要求写出在铅直平面内的光滑摆线,并分方程。
解答中使用了微积分和力学原理,得出了运动微分方程。
最后证明了质点在平衡位置附近作振动时,振动周期与振幅无关。
1.3 题目要求证明单摆运动的振动周期与摆长无关。
解答中使用了微积分和力学原理,得出了运动微分方程。
最后通过进一步计算,得出了单摆运动的振动周期公式。
1.5 题目要求使用拉格朗日方程计算质点的运动。
解答中使用了拉格朗日方程,并通过进一步计算得出了质点的运动轨迹。
如图,在半径为R时,地球表面的重力加速度可以由万有引力公式求得:g=\frac{GM}{R^2}$$其中M为地球的质量。
根据广义相对论,地球表面的重力加速度还可以表示为:g=\frac{GM}{R^2}\left(1-\frac{2GM}{c^2R}\right)$$其中c为光速。
当半径增加到R+ΔR时,总质量仍为M,根据XXX展开,可以得到:frac{1}{(R+\Delta R)^2}=\frac{1}{R^2}-\frac{2\DeltaR}{R^3}+\mathcal{O}(\Delta R^2)$$代入上式可得:g'=\frac{GM}{R^2}\left(1-\frac{2GM}{c^2R}\right)\left(1+\frac{2\Delta R}{R}\right)$$ 化简后得:g'=g-\frac{2g\Delta R}{R}$$因此,当半径改变时,表面的重力加速度的变化为:Delta g=-\frac{2g\Delta R}{R}$$2.在平面极坐标系下,设质点的加速度的切向分量和法向分量都是常数,即$a_t=k_1$,$a_n=k_2$(其中$k_1$和$k_2$为常数)。
根据牛顿第二定律,可以得到质点的运动方程:r\ddot{\theta}+2\dot{r}\dot{\theta}=k_2$$ddot{r}-r\dot{\theta}^2=k_1$$其中$r$为极径,$\theta$为极角。
《理论力学》(范钦珊)习题解答第2篇第46章.doc

(b)第2篇 工程运动学基础第4章 运动分析基础4-1 小环A 套在光滑的钢丝圈上运动,钢丝圈半径为R (如图所示)。
已知小环的初速度为v 0,并且在运动过程中小环的速度和加速度成定角θ,且 0 < θ <2π,试确定小环 A的运动规律。
解:Rv a a 2ns in ==θ,θs in 2R v a =θθt an co s d d 2tR v a tv a ===,⎰⎰=t v v t R v v 02d t an 1d 0θ t v R R v t s v 00t an t an d d -==θθ⎰⎰-=t s t t v R R v s 0000d tan tan d θθtv R R R s 0t an t an ln tan -=θθθ4-2 已知运动方程如下,试画出轨迹曲线、不同瞬时点的 1.⎪⎩⎪⎨⎧-=-=225.1324t t y tt x , 2.⎩⎨⎧==t y t x 2cos 2sin 3解:1.由已知得 3x = 4y (1) ⎩⎨⎧-=-=t y t x3344 t v 55-=⎩⎨⎧-=-=34y x5-=a 为匀减速直线运动,轨迹如图(a ),其v 、a 图像从略。
2.由已知,得2ar cco s 213ar cs i n y x =化简得轨迹方程:2942x y -=(2)轨迹如图(b ),其v 、a 图像从略。
4-3 点作圆周运动,孤坐标的原点在O 点,顺钟向为孤坐标的正方向,运动方程为221Rt s π=,式中s 以厘米计,t 以秒计。
轨迹图形和直角坐标的关系如右图所示。
当点第一次到达y 坐标值最大的位置时,求点的加速度在x 和y 轴上的投影。
解:Rt s v π== ,R v a π== t,222n Rt Rv a π==y 坐标值最大的位置时:R Rt s 2212ππ== ,12=∴tR a a x π==t ,R a y 2π-=4-4 滑块A ,用绳索牵引沿水平导轨滑动,绳的另一端绕在半径为r 的鼓轮上,鼓轮A习题4-1图习题4-2图习题4-3图e e -t (c)e e -t υ (b)R t R +υ (a)习题4-6图以匀角速度ω转动,如图所示。
大学所有课程课后答案

天天learn为大家收集了大学所有课程的课后答案,这里只列出了一部分,要想找到更多的答案,请到 查找。
资料打开方法:按住 Ctrl键,在你需要的资料上用鼠标左键单击资料搜索方法:Ctrl+F 输入关键词查找你要的资料【数学】∙01-08数值分析清华大学出版社第四版课后答案∙01-08微分几何第三版梅向明黄敬之主编课后答案∙01-07高等代数与解析几何陈志杰主编第二版课后答案∙01-07高等代数第三版北京大学数学系主编高等教育出版社出版课后答案∙01-07数学分析陈纪修主编第二版课后答案∙01-07数学分析华东师大第三版课后答案∙12-27高等数学同济大学出版社第五版课后答案∙12-08积分变换(第四版)东南大学数学系张元林编高等教育出版社课后答案∙11-30微积分复旦大学出版社曹定华主编课后答案∙11-21人大-吴赣昌-高等数学/微积分(经管类)课后答案∙11-09概率统计简明教程同济版课后答案∙11-09复变函数钟玉泉课后答案∙11-09微积分范培华章学诚刘西垣中国商业出版社课后答案∙11-09线性代数同济大学第四版课后答案∙11-08概率论与数理统计浙大版盛骤谢式千课后答案∙11-08复变函数西安交通大学第四版高等教育出版社课后答案∙11-07离散数学教程肖新攀编著课后习题答案∙11-07离散数学(第三版)清华大学出版社(耿素云,屈婉玲,张立昂)课后习题答案∙11-04高等数学同济大学出版社第六版课后答案∙10-27高等数学北大版课后答案∙【通信/电子/电气/自动化】∙01-08信号与线性系统分析吴大正第4版课后答案∙01-08信号与系统刘泉主编课后答案∙01-08信号与系统奥本海姆英文版课后答案∙01-08数字信号处理吴镇扬高等教育出版社课后答案∙01-08通信原理樊昌信第六版国防大学出版社课后答案∙01-08通信原理北京邮电大学课后答案∙12-10数字逻辑第四版(毛法尧著) 高等教育出版社∙12-10数字逻辑第二版(毛法尧著) 高等教育出版社课后答案∙12-08电路第五版邱关源罗先觉高等教育出版社课后答案∙12-03数字信号处理教程(程佩青第二版) 清华大学出版社课后答案∙12-02数字信号处理教程程佩青(第三版)清华大学出版社课后答案∙11-09模拟电子技术基础童诗白第三版习题答案∙11-09数字电子技术基础阎石第五版课后答案∙11-06信号与系统郑君里主编第二版课后答案∙11-06信号与系统哈工大课后答案∙10-31模拟电子技术基础(第四版童诗白、华成英主编)习题答案∙10-29模拟电路康华光【计算机/网络/信息】∙01-08数据结构(C语言版) 李春葆主编课后答案∙12-05计算机网络教程第五版谢希仁电子工业出版社课后答案∙11-09c程序设计谭浩强主编清华大学出版社习题答案及上机指导∙10-26C语言程序设计教程习题参考答案∙10-26MATLAB程序设计与应用(第二版)刘卫国主编实验答案【经济/金融/营销/管理/电子商务】∙01-06现代西方经济学(宏观)尹伯平主编课后答案∙01-06现代西方经济学(微观经济学) 宋承先主编第3版笔记和课后习题详解∙01-06微观经济学:现代观点范里安主编第5版课后答案∙01-05微观经济学平狄克主编第4和5版笔记和课后习题详解∙01-05宏观经济学曼昆主编第五版课后答案∙01-05宏观经济学多恩布什主编课后习题答案∙01-05企业会计学赵惠芳主编课后答案∙12-05市场调研与预测习题与实例陈启杰上海财经大学出版社课后答案∙11-28西方经济学高鸿业第四版(微观宏观)课后答案∙11-10中级财务会计刘兵初宜红山东人民出版社课后答案∙11-09经济法概论课后答案∙11-08中级财务会计(第二版)刘永泽东北财经大学课后答案【物理/光学/声学/热学/力学】∙01-19机电传动控制华中科技大学出版社邓星钟主编课后答案∙01-05量子力学张永德主编课后答案∙01-04量子力学导论曾谨言著第二版课后答案∙01-04量子力学曾谨言著高等教育出版社第三版第一卷课后答案∙01-04量子力学教程周世勋著高等教育出版社课后答案∙01-04量子力学教程曾谨言著课后答案∙01-04电动力学郭硕鸿主编第三版课后答案∙01-04理论力学卢圣治著课后答案∙01-03理论力学周衍柏著第二版课后答案∙11-09普通物理学程守洙江之咏第五版习题分析与解答∙11-09物理学马文蔚(第五版) 习题分析与解答∙11-09大学基础物理学.2版.清华.张三慧习题答案∙11-06大学物理学赵近芳主编第二版课后答案【土建/机械/车辆/制造/材料】∙01-08机械设计基础(第五版) 高等教育出版社课后答案∙01-07材料力学单辉祖主编课后答案∙01-06材料力学刘鸿文主编哈工大第四版课后答案∙11-11机械原理第六版课后答案【化学/环境/生物/医学/制药】∙01-03高分子化学潘祖仁著第四版课后答案∙01-03物理化学辅导与习题详解第五版傅献彩著∙01-02物理化学南开大学第五版课后答案∙01-02物理化学周亚平天津大学第四版课后答案∙01-02分析化学武汉大学第四版思考题答案∙01-02分析化学武汉大学第四版课后答案∙01-02基础有机化学邢其毅著课后答案∙01-01有机化学莫里森著课后答案∙12-31有机化学(第四版)高鸿宾著课后答案∙12-31有机化学(汪小兰著) 课后答案∙12-31无机化学第三版武汉大学吉林大学编高等教育出版社课后答案∙12-31中级无机化学(朱文祥著) 高等教育出版社课后答案∙12-31无机化学第三版(宋天佑著) 高等教育出版社课后答案∙12-30生物化学解题指导与测验张楚富高等教育出版社课后答案∙12-30生物化学简明教程第四版(张丽萍著) 高等教育出版社课后答案∙12-30生物化学原理(张洪渊著) 科学出版社课后答案∙12-30生物化学第三版(沈同王镜岩著) 高等教育出版社课后答案∙10-31有机化学第三版(胡宏纹著) 高等教育出版社课后答案∙10-29有机化学第四版答案曾昭琼主编高等教育出版社【法学/哲学/心理学/政治学】∙12-29实验心理学杨治良版练习题及答案07年心理学考研∙12-29《心理学》考试题库及答案程素萍浙江大学出版社∙12-29教育心理学第三版(皮连生著) 上海教育出版社课后答案∙12-04毛邓三(2007 华中科技大学版)(毛邓三编写组著) 高等教育出版社课后答案∙11-07毛邓三课后简答题答案∙10-29逻辑学参考答案∙10-26思想道德修养与法律基础罗国杰主编高教版课后答案∙10-26毛泽东思想和中国特色社会主义理论体系概论(吴树青等著) 高等教育出版社课后答案∙10-25马克思主义基本原理概论左伟清华南理工大学出版社课后答案∙10-25毛邓三思考题课后答案【英语/文学/史学/外语/教育】∙01-30step_by_step 2000 第四册听力答案课后答案∙01-30step_by_step 2000 第三册听力答案课后答案∙01-30step_by_step 2000 第二册听力答案课后答案∙01-30step_by_step 2000 第一册听力答案课后答案∙01-09大学体验英语综合教程第四册课后答案及课文翻译∙01-09大学体验英语综合教程第三册课后答案及课文翻译∙01-09大学体验英语综合教程第二册课后答案及课文翻译∙01-09大学体验英语综合教程第一册课后答案及课文翻译∙01-09新视野大学英语第五册课后答案∙01-09新视野大学英语第四册课后答案及课文翻译∙01-09新视野大学英语第三册课后答案及课文翻译∙01-09新视野大学英语第二册课后答案及课文翻译∙01-09新视野大学英语第一册课后答案及课文翻译∙01-05文学理论童庆炳主编修订二版课后答案∙01-05语言学教程胡壮麟主编课后答案[适合背诵]∙11-08中国近代史纲要沙健孙高等教育出版社课后答案∙11-07全新版大学英语综合教程第四册课后答案及课文翻译∙11-07全新版大学英语综合教程第三册课后答案及课文翻译∙11-06全新版大学英语综合教程第二册课后答案及课文翻译∙11-06全新版大学英语综合教程第一册课后答案及课文翻译∙11-06新世纪大学英语综合教程3 课后答案∙11-06新世纪大学英语综合教程2 课后答案∙11-06新世纪大学英语综合教程1 课后答案∙10-25新编大学英语(第一册)习题答案第二版∙10-25新编大学英语(第二册)习题答案∙10-25新编大学英语(第三册)习题答案∙10-25新编大学英语(第四册)课文翻译及课后习题答案。
理论力学(B)

课程号
00432199
学分
3
英文名称
Theoretical Mechanics (B)
先修课程
普通物理力学、高等数学、线性代数
中文简介
理论力学(B)课程属于物理学院中物理类学生在普物力学之后的一门理论课程,是后续多门理论物理课程的基础。该课程主要侧重于分析力学方法(具体指拉格朗日力学和哈密顿力学)的讲授。课程将分析力学的方法应用于广泛的动力学系统,既包括简单的质点运动,也包括有约束的多自由度体系以及刚体。课程主要具体内容见课程大纲。
开课院系
物理学院
通选课领域
是否属于艺术与美育
否
平台课性质
平台课类型
授课语言
中文
教材
理论力学课ቤተ መጻሕፍቲ ባይዱ讲义,刘川;
理论力学简明教程,周乐柱,北京大学出版社,2005,
参考书
教学大纲
本课程主要介绍分析力学(拉格朗日、哈密顿)的方法。这一方面使得学生能够学会复杂力学问题的分析方法,更重要的是可以与后续的课程(例如统计物理、电动力学、量子力学等)衔接。课程需要比较良好的物理和数学的背景,适合于物理学院中物理专业的学生选修,也欢迎其他专业具有相关背景知识的同学选修。
内容提要及相应学时分配: 共51
一、 拉格朗日力学 10
a) 分析力学的特点
b) 最小作用量原理(Hamilton原理)
c) 欧拉-拉格朗日方程
d) 对称性与非惯性系
e) 约束的处理
二、 中心力场问题 9
a) 一般讨论
b) Kepler问题的解
c) 潮汐现象
三、 小振动 10
a) 一维小振动的回顾
b) 多自由度体系的简正坐标与频率
理论力学练习册及答案
8-8.图示机构中,设当OA与水平线成450角的瞬时,曲柄OA有反时针方向的匀角速度ω=25 rad/s,连杆AB水平,扇形板BD铅垂。求扇形板绕定轴D转动的角加速度ε。
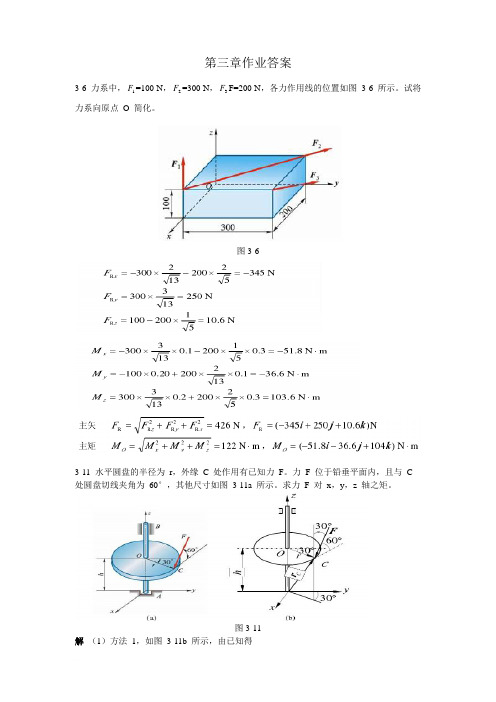
解:将力系向A点简化,并过A点建立如图所示坐标系。
由矢量式可得力系简化的最终结果为力螺旋,
作用点为:
3-2.已知A(1,0,1),B(0,1,2)(长度单位为米),F= kN。求力F对x、y、z轴的矩?
解:
3-3.如图所示,长方体边长为a、b、c,力F沿BD,试计算力F对AC轴之矩MAC(F)
解:力F对C点的矩为:
4-3.置于铅垂面内的均质正方形簿板重P= 100kN,与地面间的摩擦系数f= 0.5,欲使簿板静止不动,求作用在点A的力F的最大值?
4-4.折梯放在水平地面上,其两脚与地面的摩擦系数分别为fA= 0.2,fB= 0.6,折梯一边AC的中点D上有一重为P= 500N的重物,折梯重量不计,问折梯能否平衡?如果折梯平衡。试求出两脚与地面间的摩擦力。
第六章 刚体基本运动
6-1.在如图所示中,已知ω、。在图上标示出A、B两的速度、加速度。
6-2.在如图所示的平面机构中,半径为r的半圆盘在A和B处与杆铰接,已知 , ,曲柄O1A以匀角速度ω转动。求图示瞬时圆盘上M点的速度和加速度。
6-3.在如图所示的平面机构中,齿轮1紧固在杆AC上, ,齿轮1与半径为r2的齿轮2啮合,齿轮2可绕O2轴转动,。设 , ,试确定 时,轮2的角速度和角加速度。
解:动点取曲柄OA上A点,
理论力学第三版课后习题答案
目录第一章质点力学 (2)第二章质点组力学 (56)第三章刚体力学 (74)第四章转动参考系 (105)第五章分析力学 (115)第一章 质点力学1.1 由题可知示意图如题1.1.1图:{{SSt t 题1.1.1图设开始计时的时刻速度为0v ,由题可知枪弹作匀减速运动设减速度大小为a . 则有:()()⎪⎪⎩⎪⎪⎨⎧+-+=-=221210211021221t t a t t v s at t v s 由以上两式得11021at t s v +=再由此式得()()2121122t t t t t t s a +-=证明完毕.1.2 解 由题可知,以灯塔为坐标原点建立直角坐标如题1.2.1图.题1.2.1图设A 船经过0t 小时向东经过灯塔,则向北行驶的B 船经过⎪⎭⎫ ⎝⎛+2110t 小时经过灯塔任意时刻A 船的坐标()t t x A 15150--=,0=A yB 船坐标0=B x ,⎥⎦⎤⎢⎣⎡-⎪⎭⎫⎝⎛+-=t t y B 15211150则AB 船间距离的平方()()222B A B A y y x x d -+-=即()2021515t t d -=201521115⎥⎦⎤⎢⎣⎡-⎪⎭⎫⎝⎛++t t()20202211225225675900450⎪⎭⎫ ⎝⎛++++-=t t tt t2d 对时间t 求导()()67590090002+-=t t dtd d AB 船相距最近,即()02=dtdd ,所以h t t 430=- 即午后45分钟时两船相距最近最近距离22min231543154315⎪⎭⎫ ⎝⎛⨯-⨯+⎪⎭⎫ ⎝⎛⨯=s km1.3 解 ()1如题1.3.2图第1.3题图y题1.3.2图由题分析可知,点C 的坐标为⎩⎨⎧=+=ψψϕsin cos cos a y a r x 又由于在∆AOB 中,有ϕψsin 2sin ar =(正弦定理)所以ry r a 2sin 2sin ==ψϕ联立以上各式运用1cos sin 22=+ϕϕ由此可得rya x r a x 22cos cos --=-=ψϕ得12422222222=---++r y a x y a x r y 得22222223y a x r a x y -=-++化简整理可得()()2222222234r a y x y a x -++=-此即为C 点的轨道方程.(2)要求C 点的速度,分别求导⎪⎪⎩⎪⎪⎨⎧=--=2cos sin cos 2cos sin ϕωψψϕωϕωr y r r x 其中ϕω = 又因为ψϕsin 2sin a r =对两边分别求导 故有ψϕωψcos 2cos a r =所以22y x V +=4cos sin cos 2cos sin 2222ϕωψψϕωϕωr r r +⎪⎪⎭⎫ ⎝⎛--= ()ψϕψϕϕψω++=sin cos sin 4cos cos 22r1.4 解 如题1.4.1图所示,A BOCLxθd 第1.4题图OL 绕O 点以匀角速度转动,C 在AB 上滑动,因此C 点有一个垂直杆的速度分量22x d OC v +=⨯=⊥ωωC 点速度dx d d v v v 222sec sec cos +====⊥⊥ωθωθθ 又因为ωθ= 所以C点加速度 θθθω ⋅⋅⋅⋅==tan sec sec 2d dt dv a ()2222222tan sec 2d x d x d +==ωθθω1.5 解 由题可知,变加速度表示为⎪⎭⎫ ⎝⎛-=T t c a 2sin 1π 由加速度的微分形式我们可知dtdv a =代入得dtT t c dv ⎪⎭⎫ ⎝⎛-=2sin 1π 对等式两边同时积分dt T t c dv t v⎰⎰⎪⎭⎫ ⎝⎛-=002sin 1π可得 :D Ttc Tct v ++=2cos2ππ(D 为常数)代入初始条件:0=t 时,0=v ,故c TD π2-=即⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=12cos2T t T t c v ππ 又因为dtds v =所以=ds dt T t T t c ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+12cos2ππ 对等式两边同时积分,可得:⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=t T t T T t c s 2sin 22212πππ1.6 解 由题可知质点的位矢速度r λ=//v ①沿垂直于位矢速度μθ=⊥v又因为 r r λ== //v , 即r rλ=μθθ==⊥r v 即rμθθ= ()()j i v a θ r dtd r dt d dt d +==(取位矢方向i ,垂直位矢方向j ) 所以()j i i i θ r rdtd r i dt r d r dt d +=+=()dtd r dt d r dt dr r dt d j j j j θθθθ ++=i j j 2r r r θθθ -+= 故()()j i a θθθ r r r r22++-= 即 沿位矢方向加速度()2θ r ra -= 垂直位矢方向加速度()θθr r a 2+=⊥ 对③求导r rr 2λλ== 对④求导θμμθθr rr +-=2⎪⎭⎫⎝⎛+=λμμθr 把③④⑦⑧代入⑤⑥式中可得rr a 222//θμλ-= ⎪⎭⎫ ⎝⎛+=⊥r a μλμθ1.7 解 由题可知⎩⎨⎧==θθsin cos r y r x ①②对①求导θθθ sin cos r r x-= ③ 对③求导2 ④对②求导θθθcos sin r r y+=⑤ 对⑤求导θθθθθθθsin cos cos 2sin 2 r r r ry -++=⑥ 对于加速度a ,我们有如下关系见题1.7.1图题1.7.1图即⎩⎨⎧+=+=θθθθθθcos sin sin cos a a y a a x r r⑦--⑧ 对⑦⑧俩式分别作如下处理:⑦θcos ⨯,⑧θsin ⨯ 即得⎩⎨⎧+=-=θθθθθθθθθθcos sin sin sin cos sin cos cos a a y a a x r r⑨--⑩ ⑨+⑩得θθsin cos yx a r += ⑾ 把④⑥代入 ⑾得2θr r a r -= 同理可得θθθ r r a 2+= 1.8解 以焦点F 为坐标原点,运动如题1.8.1图所示]题1.8.1图则M 点坐标⎩⎨⎧==θθsin cos r y r x 对y x ,两式分别求导⎪⎩⎪⎨⎧+=-=θθθθθθcos sin sin cos r r yr r x 故()()22222cos sin sin cos θθθθθθ r r r r y xv ++-=+=222ωr r+= 如图所示的椭圆的极坐标表示法为()θcos 112e e a r +-=对r 求导可得(利用ωθ= )又因为()()221cos 111e a e e a r -+-=θ即()rer e a --=21cos θ 所以()()2222222221211cos 1sin e r e ar r e a --+--=-=θθ故有()2222224222sin 1ωθωr e a r e v +-=()2224221ea r e -=ω()()]1211[2222222e r e ar r ea --+--22ωr +()()⎥⎦⎤⎢⎣⎡--+-⋅-=2222222221121e e ar r r e e a r ω()r r a b r -=2222ω 即()r a r br v -=2ω(其中()b a e b ,1222-=为椭圆的半短轴)1.9证 质点作平面运动,设速度表达式为j i v y x v v +=令为位矢与轴正向的夹角,所以dt d v dt dv dt d v dt dv dt d y y x x j j i i v a +++==j i ⎪⎪⎭⎫ ⎝⎛++⎪⎭⎫ ⎝⎛-=θθ x y y x v dt dv v dt dv 所以[]j i a ⎪⎪⎭⎫⎝⎛++⎪⎭⎫ ⎝⎛-=θθ x yy x v dt dv v dt dv ()j i y x v v +⋅ θθ y x y y y x x x v v dt dv v v v dt dv v ++-=dtdv v dt dv v y yxx += 又因为速率保持为常数,即C C v v y x ,22=+为常数对等式两边求导022=+dtdv v dt dv v y y xx所以0=⋅v a即速度矢量与加速度矢量正交.1.10解 由题可知运动轨迹如题1.10.1图所示,题1.10.1图则质点切向加速度dtdv a t =法向加速度ρ2n v a =,而且有关系式ρ2v 2k dt dv -= ①又因为()232y 1y 1'+''=ρ②2px y 2=所以yp y =' ③ 32yp y -='' ④ 联立①②③④2322322y p 1y p 2kv dtdv⎪⎪⎭⎫ ⎝⎛+-= ⑤又dydv ydt dy dy dv dt dv =⋅=把2px y 2=两边对时间求导得pyy x= 又因为222y xv += 所以22221py v y+= ⑥ 把⑥代入⑤23223222122121⎪⎪⎭⎫ ⎝⎛+⋅-=⋅⎪⎪⎭⎫ ⎝⎛+y p y p kv dydvp y v既可化为222py dykp v dv +-= 对等式两边积分222py dykp v dv p p vu+-=⎰⎰- 所以πk ue v -=1.11解 由题可知速度和加速度有关系如图1.11.1所示题1.11.1图⎪⎪⎩⎪⎪⎨⎧====ααcos sin 2a dt dv a a r v a t n 两式相比得dtdvr v ⋅=ααcos 1sin 2 即2cot 1vdv dt r =α 对等式两边分别积分200cot 1v dv dt rv v t⎰⎰=α 即αcot 11rtv v -=此即质点的速度随时间而变化的规律.1.12证 由题1.11可知质点运动有关系式⎪⎪⎩⎪⎪⎨⎧==ααcos sin 2a dtdv a r v ①② 所以 ωθθθd dv dt d d dv dt dv =⋅=,联立①②,有ααωθcos sin 2r v d dv = 又因为r v ω=所以 θαd vdv cot =,对等式两边分别积分,利用初始条件0=t 时,0θθ=()αθθcot 00-=e v v1.13 证(a )当00=v ,即空气相对地面上静止的,有牵相绝v v v +=.式中绝v 质点相对静止参考系的绝对速度, 相v 指向点运动参考系的速度, 牵v 指运动参考系相对静止参考系的速度.可知飞机相对地面参考系速度:绝v =v ',即飞机在舰作匀速直线运动.所以飞机来回飞行的总时间v l t '=20. (b )假定空气速度向东,则当飞机向东飞行时速度01v v v +'=飞行时间1v v lt +'=当飞机向西飞行时速度0v v v v v -'=+=牵相飞行时间2v v lt -'=故来回飞行时间021v v l t t t +'=+=0v v l -'+222v v lv -''= 即2200220112v v t v v v lt '-='-'= 同理可证,当空气速度向西时,来回飞行时间2201v v t t '-=(c )假定空气速度向北.由速度矢量关系如题1.13.1图v 题1.13.1图v v v '+=0绝202v v v -'= 所以来回飞行的总时间222vv l t -'=2200220112v vt v v v l '-='-'=同理可证空气速度向南时,来回飞行总时间仍为2201v v t t '-=1.14解 正方形如题1.14.1图。
《理论力学》课后习题解答(赫桐生版)
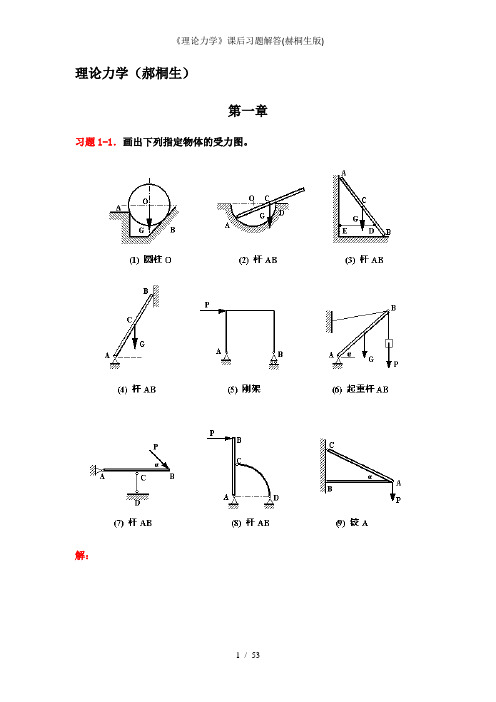
理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。
理论力学课外作业加答案详解
解 =2r
即:
第六章作业答案
6-4机构如图6-4所示,假定杆AB以匀速v运动,开始时 =0。求当 时,摇杆OC的角速度和角加速度。
图6-4
解依题意,在 =0时,A在D处。由几何关系得:
两边对时间t求导: ,
当 时,杆OC的角速度 (逆)
杆OC的角加速度 (顺)
6-5如图6-5所示,曲柄CB以等角速度 绕轴C转动,其转动方程为 。滑块B带动摇杆OA绕轴O转动。设OC = h,CB = r。求摇杆的转动方程。
图8-5
解筛子BC作平移,如图8-5b所示的位置, 与CBO夹角为30°,与AB夹角为60°。且
由速度投影定理 得(图8-5b)
8-8图8-8a所示机构中,已知:OA = BD=DE=0.1m,EF= m;曲柄OA的角速度 =4rad/s。在图示位置时,曲柄OA与水平线OB垂直,且B、D和F在同一铅垂直线上,又DE垂直于EF。求杆EF的角速度和滑块F的速度。
图7-10
解(1)运动分析
轮心C为动点,动系固结于AB;牵连运动为上下直线平移,相对运动为与平底平行直线,绝对运动为绕O圆周运动。
(2)速度分析,如图7-10b所示
7-11绕轴O转动的圆盘及直杆OA上均有一导槽,两导槽间有一活动销子M,如图所示,b =0.1m。设在图示位置时,圆盘及直杆的角速度分别为 =9rad/s和 =3rad/s。求此瞬时销子M的速度。
图6-12
解设轮缘上任1点M的全加速度为a,切向加速度 ,法向加速度 ,如图
6-12b所示。
把 , 代入上式,得
分离变量后,两边积分得 (1)
把 代入上式进行积分
得 (2)
这就是飞轮的转动方程。
式(1)代入式(2),得
理论力学之动力学习题答案北航
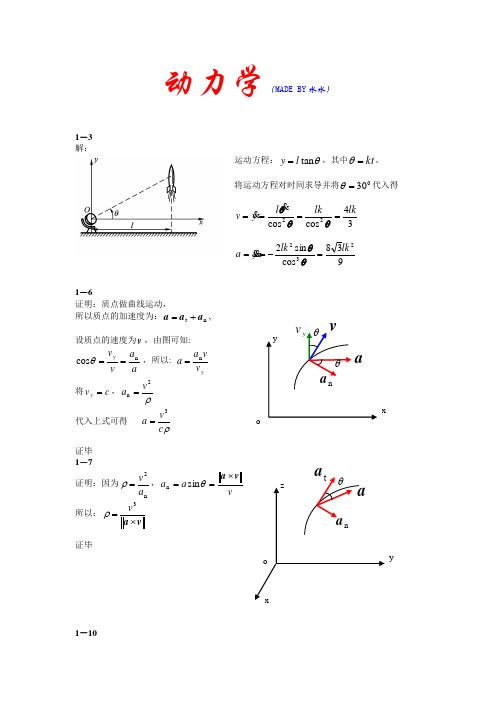
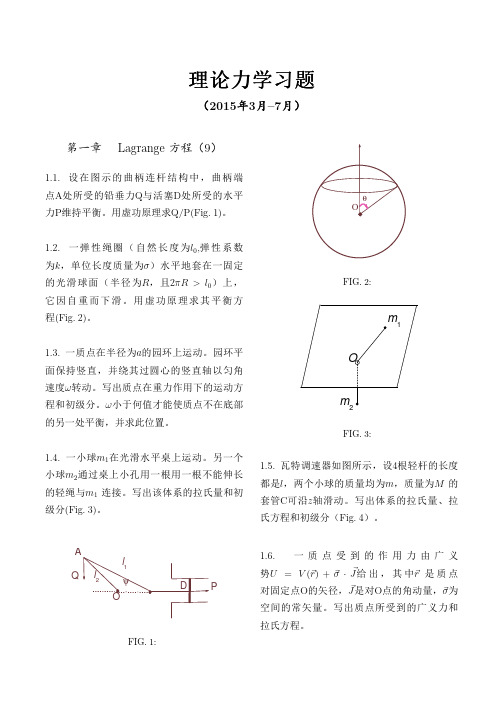
动力学(MADE BY 水水)1-3 解:运动方程:θtan l y =,其中kt =θ。
将运动方程对时间求导并将030=θ代入得34cos cos 22lk lk l y v ====θθθ938cos sin 2232lk lk y a =-==θθ1-6证明:质点做曲线运动,所以质点的加速度为:n t a a a +=,设质点的速度为v ,由图可知:a a v v yn cos ==θ,所以: yv va a n =将c v y =,ρ2n v a =代入上式可得 ρc v a 3=证毕 1-7证明:因为n 2a v =ρ,v a a v a ⨯==θsin n 所以:va ⨯=3v ρ 证毕1-10xoy解:设初始时,绳索AB 的长度为L ,时刻t 时的长度 为s ,则有关系式:t v L s 0-=,并且 222x l s +=将上面两式对时间求导得:0v s-= ,x x s s 22=由此解得:xsv x 0-= (a ) (a)式可写成:s v x x 0-= ,将该式对时间求导得:2002v v s x x x=-=+ (b)将(a)式代入(b)式可得:3220220xlv x x v x a x -=-== (负号说明滑块A 的加速度向上)取套筒A 为研究对象,受力如图所示,根据质点矢量形式的运动微分方程有:g F F a m m N ++=将该式在y x ,轴上投影可得直角坐标形式的运动微分方程:N F F ym F mg xm +-=-=θθsin cos其中:2222sin ,cos l x l lx x +=+=θθ0,3220=-=yx l v x将其代入直角坐标形式的运动微分方程可得:23220)(1)(x lxl v g m F ++=1-11o vo vF N Fg myθ解:设B 点是绳子AB 与圆盘的切点,由于绳子相对圆盘无滑动,所以R v B ω=,由于绳子始终处于拉直状态,因此绳子上A 、B 两点的速度在 A 、B 两点连线上的投影相等,即:θcos A B v v = (a ) 因为x R x 22cos -=θ (b )将上式代入(a )式得到A 点速度的大小为:22R x xRv A -=ω (c )由于x v A -=,(c )式可写成:Rx R x x ω=--22 ,将该式两边平方可得:222222)(x R R x xω=-将上式两边对时间求导可得:x x R x x R x xx 2232222)(2ω=--将上式消去x2后,可求得: 22242)(R x xR x--=ω (d)由上式可知滑块A 的加速度方向向左,其大小为 22242)(R x xR a A -=ω取套筒A 为研究对象,受力如图所示,根据质点矢量形式的运动微分方程有:g F F a m m N ++=将该式在y x ,轴上投影可得直角坐标形式的 运动微分方程:mg F F ym F xm N -+=-=θθsin cos其中:x R x xR22cos ,sin -==θθ, 0,)(22242=--=y R x x R x ω将其代入直角坐标形式的运动微分方程可得2525)(,)(225222242R x x R m mg F R x x R m F N --=-=ωω1-13解:动点:套筒A ;动系:OC 杆;定系:机座;运动分析:绝对运动:直线运动;相对运动:直线运动;牵连运动:定轴转动。
理论力学(第2版)习题答案

各章习题(计算题)部分答案第1章 略 第2章2-1 R 3284kN F .=,R cos()2063,.=︒F i ,R cos()1163,.=︒F j 2-2 3162kN T .=,30β=︒ 2-3 482.α=︒,R 496kN x F .= 2-4 11866N 50N x y F .F ==,2230N 40N x y F F ==-, 330N 60N x y F F ==, 44566N 566N x y F .F .==, 2-5 R 0F =2-6(a) 707kN 354kN 354kN Ax Ay B F .F .F .===,,(b) 05kN 5kN Ax Ay B F F F ===,,(c) 933kN 433kN 612kN Ax Ay B F .F .F .===,,(垂直于支撑面,指向简支梁) 2-7 min 15kN F =,N 25kN F =2-8 0866kN 05kN 1kN Ax Ay BD F .F .T ===,, 2-9 N N 1732kN 3464kN 15m A C F .F .AC .===,, 2-10 03436kN AB AC F F .==,2-11 BC F =,Ax F =,Ay F G = 2-12 N 65EF G F =+2-13 N N C D F F =2-14 231N 1155N 231N 845N AB AE BC BD F F .F F .====,,,2-15 (a) 33PF P F B Ay =-=,(b) P F F B A 32== (A F ,B F 方向相反,组成一力偶) (c) 0==B A F F2-16 1F,AB F,OA F =,7kN BC F =- 2-17 1905N 1905N 1905N 1905N Ax Ay Cx Cy F F F F =-===-,,, 2-18 3571N 3571N 3571N 3571N Ax Ay Cx Cy F F F F ==-=-=,,,·312··312·2-19 24kN m M =⋅,1155kN A B F F .== 第3章3-1 2400N Ax F =,1200N Ay F =,8485N BC F .= 3-2 R 0F'=,260N m O M =⋅ 3-3 (a) R F'qa =,221qa M O = (b) R12F'ql =,21ql q M O = 3-4(a) Ax F =,40kN Ay F =,120kN m A M =⋅,N C F = (b) 0=AxF ,25kN Ay F .=-,15kN By F =,D 25kN y F .=3-5 当60α=︒时,min 4AB PrF L= 3-6 0=Ax F ,qa F Ay2=,2qa M A =3-7 (a)2400N Ax F =,1000N Ay F =-,2400N Dx F =-,2000N Dy F = (b)2400N Ax F =-,1000N Ay F =-,2400N Dx F =,2000N Dy F =3-8 Ax F =,Ay F =,Bx F =,By F =3-9 rPLF Ax 2-=,P F Ay =,r PL F Bx 2=,P F By =,r PL F D 2=,P F C 2=3-10 R 32E F qa =-,qa F BD 22= 3-11 23kN Ax Cx F F .=-=-,1kN Ay Cy F F == 3-12 3PF AC -=,0=EF F ,32P F BD -= 3-13 2F F BC=,2F F DE = 第4章4-1 T 20kN F =,104kN OA F .=-,139kN OB F .=- 4-2 254kN m x M .=⋅,146kN m y M .=⋅,0=z M 4-3 0)(=P z M4-4 θαsin sin )(Pa M AB =P 4-5 3C A B WT T T ===4-6 1kN T =,0=Ax F ,750N Ay F =-,500N Az F =-,433N Bx F =,500N BZ F = 4-7 F F F -==61,F F =3,0542===F F F·313··313·4-8 321M a cM a b M +=,a M F Ay 3=,a M F Az 2=,0=Dx F ,a M F Dy 3-=,aM F Dz 2-= 4-9 4kN Ax F =,146kN Az F .=-,79kN Bx F .=,29kN Bz F .=-4-10 5kN Ox F =-,4kN Oy F =-,8kN Oz F =,32kN m Ox M =⋅,30kN m Oy M =-⋅,20kN m Oz M =⋅4-11 (a ) 10412kN N F .=,20213kN N F .=,30375kN N F .= 4-12 )(22221221r r r r x C --=,0=C y4-13 (a ) 589mm C x .=-,0=C y (b ) 797mm C x .=,349mm C y .= 4-14 )(22221221r r r r x C --=,0=C y4-15 0Ax F =,121(P )2Ay F P =-+,21P 2Az P F =+,0Cx F =,0Cy F =,22Cz P F =第5章5-1 min F =,s arctan f α= 5-2 )()m m sin +cos -P F αϕθϕ=,m θϕ=5-3 (1) A 先滑动,(2) A 、B 一起滑动 5-4 能保持平衡,S 201N F = 5-5 223.0=f5-6 3πarcsin 43πff α=+5-7 1s sin cos P F f αα=-,2s sin cos PF f αα=+,故21F F >5-8 min 845kN Q .= 5-9 435N P .=5-10 θ≤9926.︒5-11 120cm x >5-12 s 2(sin cos )Q R f L αα⋅+≤P ≤s 2(sin cos )Q Rf L αα⋅-5-13 min 1475N P .=5-14 4961N m .⋅≤C M ≤7039N m .⋅ 5-15 11cm b <5-16s s sin cos cos sin f Q f αααα-+≤P ≤s s sin cos cos sin f Q f αααα+- 5-17 arc ϕ=·314··314·5-18 500N P = 5-19 s f ≥15.0 5-20 75mm b .< 第6章6-1 (cos sin )x v lk kt kt =-,(cos sin )y v lk kt kt =-+; )sin (cos 2kt kt lk a x +-=,)sin (cos 2kt kt lk a y --= 6-2 (1) 0=s ;v R ω=;0a τ=,2n a R ω=(2) R s 23=;12v R ω=;2a ωτ=,2n 14a R ω= (3) R s =;0v =;2a R ωτ=-,n 0a =6-3 直角坐标法:t R x ω2cos =,t R y ω2sin =;2sin2x v R t ωω=-,2cos2y v R t ωω=; t R a x ωω2cos 42-=,t R a y ωω2sin 42-=自然坐标法:t R s ω2=;2v R ω=;0a τ=,2n 4a R ω= 6-4 ()sin M x l b t ω=+,()cos M y l b t ω=-;22221()()M M x y l b l b +=+-6.52222()1()x a y b l l-+=+6-6 22)sin (cos h t r l t r x B +-+=ωω,h y B -=6-7v =322xb u a -= 6-8 )cos sin arctan(00tr h tr ωωθ-=6-9 当0s t =时,157cm s M v ./=;0M a τ=,n2617cm s M a ./=当2s t =时,0M v =;2123cm s M a ./τ=-,n0M a =6-10 C x =C y =2C avv l=6-11 t e R t e y ωω222cos sin -+=;[cos v e t ωω=6-12 02cos4m x .t =;0566m s v ./=-;22263m s a ./=-6-13 0arctan rad v tbϕ=;02220rad s bv /b v t ω=+6-14 225t =ϕ;120m s v /=;236000m s n a /= 6-15 8rad s /ω=;2384rad s ./ε=-6-16 转轴O 的位置位于正方形的中心;1rad s /ω=,21rad s /ε=6-17 12C v r ω=;n 214C a r ω=,12C a r ετ=·315··315·6-18 12m s M v ./=;n 272m s M a ./=,206m s M a ./τ= 6-19 0377m s C v ./=6-20 2225000rad s /dεπ=;25922m s a ./= 6-21 32rad .ϕ=6-22 12mm h =6-23 02=ω,222r lb ωε-=6-24 02m s AB v ./=,2005m s AB a ./=;02m s C v ./=,n 20267m s C a ./=,2005m s C a ./τ=6-25 2012ωr a =,方向沿1AO ;2024ωr a =,指向轮心第7章7-1 x'vt =,cos()a kt y'ϕ=+,轨迹方程为cos()ky'a x'vϕ=+ 7-2 2cos M v R ωϕ=,方向水平向左 7-3 (a )2309rad s ./ω=; (b )2182rad s ./ω=7-4 (1)34OC v b ω=,34C lv v b=;(2)234K v a b = 7-5 当0ϕ︒=时,0v =;当30ϕ=︒时,100cm s v /=,向右;当90ϕ︒=时,200cm s v /=,向右7-6 126m s BC v ./=;2274m s BC a ./= 7-7 10cm s CD v /=;2346cm s CD a ./= 7-8 a a =7-9 3v ω=,方向向上7-10 1.732rad /s ω=,28.66rad /s ε=- 7-11 0.173m /s v =,20.05m /s a = 7-12 0.173m /s M v =,20.35m/s M a =7-13 πcos 15sin BC nr v αβ=7-14 23CD r v ω=;29310ωr a C D =7-15 a 3465mm s v ./=;21400mm s CD a /=第8章8-1 122v v r ω-=,122O v v v +=8-2 156cm s C v ./=,17cm s D v /=·316··316·8-3 877cm s C v ./=8-4 375rad s OB ./ω=,I 6rad s /ω=8-5 600mm s A v /=,200mm s B v /=,s C v /=;4rad s 3ABC /ω=,05rad s BD ./ω= 8-6 2rad s AB /ω=,2578rad s AB ./ε=-;667rad s BC ./ω=-,21926rad s BC ./ε=8-7 2()C A Rv a R r r=-,2Bx C a a τ=,2(2)()C By R r v a R r r -=- 8-8 2022ωr a B =,20211ωε=B O 8-9 032C v r ω=,20123ωr a C =8-10 01.15v l ω=8-11 16186rad s O C ./ω=,127817rad s O C ./ε=-8-12 s CD v /=,22m s 3CD a /= 8-13 n 2400cm s B a /=,21705cm s B a ./τ=-,21705cm s C a ./=-8-14 34e OC v v OB b ω==,OC ε=;12E v v =,E a = 8-15 21960mm s B a /=,298rad s AB ./ε=8-160C v ω,方向向左;rR B O 01ωω=,逆时针转向8-17 22()C Rv a R r =-,B a =8-18 n 202B a a ω=,2002)B a a ετ=-8-19 330ωω=B ;209)349(10ω+-=B a 8-20 2m s B v /=,2828m s C v ./=,28m s B a /=,21131m s C a ./= 第9章9-1 rgf=max ω 9-2 min 67r min n /=9-3 1v =9-4 0cos cos sin v x b kt kt k α=+,0sin sin vy kt kα=9-5 0cos x v t α=,201sin 2y v t gt α=+·317··317·9-6 0(1e )kt v s k-=- 9-7 202s t .=,707m s .= 9-8 172N F .=9-9 )(22g a amL F AC +=ω,)(22g a a mL F BC -=ω9-10 max 584kN F .=,min 536kN F .=9-11 g f f a ααααsin cos cos sin -+=,N cos sin W F f αα=- 9-12 )cos 1(200t m F t x ωωυ-+=第10章10-1 (a ) 12p mL ω=,方向水平向右;(b ) p mR ω=,方向水平向右;(c ) p me ω=,方向垂直于OC 的连线;(d ) C p mv =,方向水平向右10-2 30N x F =10-3 11221022a gP P P P F -++= 10-4 11r 12m v v v m m =++10-5 0(sin cos )v t g f'αα=-10-6 12(54)2l p m m ω=+,方向与曲柄垂直且向上 10-7 t m m l m x m m kx ωωsin 1211+=++10-8 2R s =10-9 (1) 3123123(22)cos ,2()C P L P P P L tx P P P ω+++=++ (2) 12123(2)sin ;2()C P P L t y P P P ω+=++2321max 222ωL gP P P F Ox ++=10-10 椭圆 2224l y x =+10-11 (1) 2sin G Wx l t P W Gω+=++ (2) 2m a x 2x G W F l g ω+=10-12 向右移377cm . 10-13 33(sin )cos ox R F m g m a r θθ=+,1233()(sin )sin oy RF m g m g a m g m a rθθ=+-++ 10-14 21212)(m m gm m f b m a ++-=·318··318·10-15 17cm A s =,向左移动;9cm B s =,向右移动 10-16 2max12(2)2ox r F F G G gω=++10-17 24(cos sin )3Ox mR F ωϕεϕπ=-+,24(sin cos )3Oy mR F mg ωϕεϕπ=+- 第11章11-1 (a ) ω2031ml L =,(b ) ω2021mR L =,(a ) ω2023mR L =11-2 208m s a ./=,2862kN T F .=,4626kN Oy F .=11-3 (1) ωωω22231ml mR Ml L O ---=,(2) ωω2231ml Ml L O --=11-4 θω22sin )312(l M m L O +=11-5 480r min n /=11-6 022ωωmr J ma J z z ++=11-7 0N 0Pr F fgt ω= 11-8 211212122()()R M R M'm m R R ε-=+11-9 )()(2212J i J gPR R PR Mi a ++-=11-10 t P P gkl)3(3cos210+=δϕ11-11 gR RW g J R W M a 2101sin +-=α,1T 1sin W F W a g α=+ 11-12 g J r m r m r m r m O++-=2222111122ε11-13 g R m r R m r R m a )()()(2222121ρ++++=,)()()(22221212ρρ+++-=R m r R m g m m Rr F11-14 v =T 13F mg =11-15 θsin 74g a =,θsin 71mg F -= 11-16 g a C 355.0=11-17 3)(2121m m gm m f F a ++-=·319··319·11-18 gr M R m r m R fm r m a 2222121ρ++-=,T 11A F m g m a =-,2T 2B m RF fm g a r=+11-19 2N 22sin 12D QL F a Lα=+,αcos g a Cx =,22212sin 12L a g a a Cy +=α 11-20 N 3633N B F .=11-21 P F F x O x O 516.021==,P F y O 434.11=,P F y O 164.12=第12章12-1 )cos 1(0ϕ+=mgr W AB ,)sin (cos 0θϕ-=mgr W AC 12-2 129904J F W .=,10500J f W =- 12-3 12206J W .=-,23206J W .=,031=W 12-4 (a) 2216T ml ω=,(b) 2234T mR ω=,(c) 2214T mR ω=,(d) 234C T mv =,12-5 10J W =重,503J W .=重12-6 θω222sin 61ml T = 12-7 21s s hf += 12-8 2122)cos (sin 2m m f gr m M r++-=ααϕϕω12-9 v=12-10 A v =12-11 A v =12-12 v =11/sin M R W a g W Wα-=+12-13 C v =45C a g =12-14 98N F .= 12-15 θωsin 3632121l g m m m m ++=,θεcos 23632121lgm m m m ++=12-16 C v =321321843)43(m m m gm m m F +++=12-17 (1) 2211)3()sin (2Rm m gR m M +-=αε, (2) R m m gR m M m F Ox )3(2)2sin cos 6(2121++=αα; ααsin )3()sin 3(21212⋅+++=Rm m gR m M m g m F Oy·320··320·12-18 v =m khmg a 34-=,41s 36F kh mg =+ 第13章13-1 αsin 32g a =13-2 g a 32=,T 3WF =13-3 Q P Pg a 322+=,QP PQF 32+=13-4 g P T a 3cos 2α=,N sin F P T α=-,s 1cos 3F T α= 13-5 22233cos sin 3()sin 2b a g b a ϕϕωϕ-=-13-6 445N ADF .=,54N BE F =13-7 2222(sin )cos sin J mr mr M ϕϕϕϕϕ++= 13-8 2222143)2(43ωr m gr m m M -+=,2143ωr m F Ox -=,4)2()(22121ωr m m g m m F Oy +-+= 13-9 0β=︒时,2329N Ax F =-,1382N Bx F =,1962N Ay By F F .==180β=︒时,12238N Ax F .=,592N Bx F =-,1962N Ay By F F .==13-10 2023ωmr F Ax -=,mgr F Ay =,20221ωmr F Bx =,mgr F By =13-11 g a a C x C 1712==,mg F 175= 13-12 l g 791=ε,lg 732-=ε,0=Ox F ,mg F Oy 72=第14章14-1 ctg 2P /Q /ϕ= 14-2 (3ctg 2)Ax F /P θ=14-3 A F P /=14-4 ctg Q P θ= 14-5 450N Q P /==14-6 12F F l =/2(cos )a ϕ14-7 05kN 21kN m Ax Ay A F F m ===⋅,,14-8 1866kN P .=14-9 2()F lx a k b=+14-10 2(kN)Ax F =, 3.804(kN)Ay F =,24(kN m)A M =-⋅,18.588(kN)B F =。
北大理论力学作业详解
求出该方程的任意一特解,并给出其物
理 解 释 ;3. 再 求 “2.” 中 的 方 程 的 通 解 ;
如t = 0时 ,x = 0, x˙ = 0, 求 该 质 点 的 运
动。( mx¨(1 + y′2 + z′2) + mx˙ 2(y′y′′ + z′z′′) =
ϕ(x)+ψ(x)y′−mgz′, x = −2c+aeαt+be−αt, α =
O
m 2 FIG. 3:
1.4. 一小球m1在光滑水平桌上运动。另一个 小球m2通过桌上小孔用一根用一根不能伸长 的轻绳与m1 连接。写出该体系的拉氏量和初 级分(Fig. 3)。
1.5. 瓦特调速器如图所示,设4根轻杆的长度 都是l,两个小球的质量均为m,质量为M 的 套管C可沿z轴滑动。写出体系的拉氏量、拉 氏方程和初级分(Fig. 4)。
北京大学出版社理论力学部分习题解答

16 ΣM C = 0 ⇒ RD × 3 = 2× 4× 2 ⇒ RD = 3 kN ΣM A = 0 ⇒ RB × 4 + 6 + RD × 9 = 10 × 6 + 2 × 4 ×8 ⇒ RB = 17.5kN
29 ΣFy = 0 ⇒ RAy + RD + RB = 10 + 2 × 4 ⇒ RAy = − 6 kN
示:
2 ΣFx = 0 ⇒ F1 + F2 × 2 + FGH = 0
2 ΣFy = 0 ⇒ 50 Байду номын сангаас F2 × 2 = RE ΣM D = 0 ⇒ GGH = RE = 87.5 ∴ F1 = −125kN ; F2 = 37.5 2kN
F1 D 5 0 k N
E
F2
H RE FGH
对 H 点采用节点法;
反力。
ΣFx = 0 ⇒ N A = NB
ΣFy = 0 ⇒ T = G
ΣM = 0 ⇒ N A (orNB ) × 9 = G(orT ) × 2
∴ NA
=
NB
=
1000 3
N
习题 2.28 试求如图 3.40 所示多跨梁的支座反力。
(a):
ΣM B = 0 ⇒ RA × 4 = 5× 4 × 2 ⇒ RA = 10kN ΣFy = 0 ⇒ RCy + RA = 5×8 +12 ⇒ RCy = 42kN ΣM C = 0 ⇒ M C + 5×8× 6 +12× 2 = 10 ×10 ⇒ M C = −164kN • m
s
联立可得:
tan θ
=
P2 P1
θ
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
活动铰链。已知力 F,机构平衡时角度如图所示,各构件自重不
计,求此时工件 H 所受的压紧力。
F ΣFB = 0 ⇒ NBC = sin α
ΣFC
=
0⇒
N BC sin(π − 2α )
=
NCE sin(π / 2)
ΣFE = 0 ⇒ FH = NCE cosα F
利用三角形法则
ΣFF = 0
N AF N FG
=
4.48 4.37
⇒
N AFBiblioteka = 367kNN BF N FG
=
1 4.37
⇒
N BF
= 82kN
习题 2.34 由杆 AB、BC、和 CE 组成的支架和滑轮 E 支持着物体 W。物体 W 重 12kN。D 处为铰链连接,尺寸如图 3.48 所示。试 求固定铰链支座 A 和滚动铰链支座 B 的约束力以及杆 BC 所受 的力。
s
联立可得:
tan θ
=
P2 P1
θ
P2
∴ s = lP1
P1 45°
45°
P12 + P22
习题 2.14 在图示机构中,曲柄 OA 上作用一力偶,其矩为 M;
另在滑块 D 上作用水平力 F。机构尺寸如图 2.45 所示,各杆重
量不计。求当机构平衡时,力 F 与力偶矩 M 的关系。
ΣM O = 0 ⇒ N AB × a cosθ = M
联立方程可得: FH = 2 sin 2 α
α α
α
习题 2.10 两均质轮各重为 P1 与 P2,用长为 l 的无重细杆铰接,
放在倾角为的光滑斜面上,如图 2.34 所示。求系统平衡时的位
置(用长度 s 表示)。
ΣF1 = 0 ⇒ T cosθ = P1 sin 45°
ΣF2 = 0 ⇒ T sinθ = P2 sin 45°
ΣFB
=
0
⇒
N AB sin(π + 2θ )
=
N BD sin(π / 2 −
2θ )
ΣM D = 0 ⇒ F = −NBD cosθ 联立方程可得: Fa tan 2θ = M
θ
θ
θ
习题 2.62 如图 2.44 所示匀质杆 AB,长为 15m,重为 1500N,由
绳子悬挂起来,两端与光滑铅垂墙壁接触,求 A、B 两点的约束
(d):
2 ΣM B = 0 ⇒ RC × 2a = F sin 45°× a ⇒ RC = 4 F
2 ΣFx = 0 ⇒ RAx = F cos 45° = 2 F
2 ΣFy = 0 ⇒ RAy + RC = F sin 45° ⇒ RAy = 4 F
2
2
ΣM A = 0 ⇒ M A + RC × 4a = M + 2 F × 3a ⇒ M A = M + 2 Fa
示:
2 ΣFx = 0 ⇒ F1 + F2 × 2 + FGH = 0
2 ΣFy = 0 ⇒ 50 + F2 × 2 = RE ΣM D = 0 ⇒ GGH = RE = 87.5 ∴ F1 = −125kN ; F2 = 37.5 2kN
F1 D 5 0 k N
E
F2
H RE FGH
对 H 点采用节点法;
ΣFH = 0 ⇒ F3 = FGH = −87.5kN
(b):
16 ΣM C = 0 ⇒ RD × 3 = 2× 4× 2 ⇒ RD = 3 kN ΣM A = 0 ⇒ RB × 4 + 6 + RD × 9 = 10 × 6 + 2 × 4 ×8 ⇒ RB = 17.5kN
29 ΣFy = 0 ⇒ RAy + RD + RB = 10 + 2 × 4 ⇒ RAy = − 6 kN
反力。
ΣFx = 0 ⇒ N A = NB
ΣFy = 0 ⇒ T = G
ΣM = 0 ⇒ N A (orNB ) × 9 = G(orT ) × 2
∴ NA
=
NB
=
1000 3
N
习题 2.28 试求如图 3.40 所示多跨梁的支座反力。
(a):
ΣM B = 0 ⇒ RA × 4 = 5× 4 × 2 ⇒ RA = 10kN ΣFy = 0 ⇒ RCy + RA = 5×8 +12 ⇒ RCy = 42kN ΣM C = 0 ⇒ M C + 5×8× 6 +12× 2 = 10 ×10 ⇒ M C = −164kN • m
0
⇒
N BC
×
2 2.5
×1.5 +W
×1.5
=
0
⇒
N BC
=
−15kN
习题 2.36 试用截面法求如图 3.50 所示桁架的内力。
整体法:
ΣM A = 0 ⇒ RE × 4 = 100 × 2 + 50 × 3 ⇒ RE = 87.5kN
用截面法将 1,2,GH 三根杆件截开,取右边为分析对象如图所
整体法:
将绳索剪断用一对拉力 T 代替
ΣM A = 0 ⇒ RB × 4 = W ×1.5 +W × 2 ⇒ RB = 10.5kN ΣFx = 0 ⇒ RAx = W = 12kN (→) ΣFy = 0 ⇒ RAy = W = 1.5kN (↑)
隔离法:
将 CB 杆断开用 NBC 代替
ΣM D
=
(c):
ΣM C = 0 ⇒ RD × 4 + 40 = 10× 2×1 ⇒ RD = −5kN ΣM A = 0 ⇒ RB × 2 + 40 = 10 × 4 × 4 + 5×8 ⇒ RB = 80kN ΣFy = 0 ⇒ RAy + RB + RD = 10 × 4 ⇒ RAy = −35kN
习题 2.30 厂房屋架如图 3.44 所示,其上承受铅垂均布载荷。若 不计各构件自重,试求杆 1、2、3 的受力。
整体法:
ΣM A = 0 ⇒ NE ×17.74 = 20 ×17.74 ×8.87 ⇒ NE = 177.4kN
用截面法将 FG 以及 C 点截断
ΣMC = 0 ⇒ NFG × 2.2 + 20×8.87 × 4.435 = 177.4× 8.87 ⇒ NFG = 358kN