07立体讲义观察与像点坐标量测
《摄影测量学》课程笔记

《摄影测量学》课程笔记第一章绪论一、摄影测量学的基本概念1. 定义摄影测量学是一种通过分析摄影图像来获取地球表面及其物体空间位置、形状和大小等信息的科学技术。
它结合了光学、数学、计算机科学和地理信息科学等多个领域的知识,为地图制作、资源管理、环境监测和工程建设等领域提供精确的数据。
2. 分类- 地面摄影测量:使用地面上的摄影设备进行的摄影测量,适用于小范围或精细的测量工作。
- 航空摄影测量:利用飞行器(如飞机、无人机)搭载摄影设备进行的摄影测量,适用于大范围的地形测绘。
- 卫星摄影测量:通过卫星搭载的传感器获取地球表面信息,适用于全球或大区域的环境监测和资源调查。
3. 应用领域- 地图制作:制作各种比例尺的地形图、城市规划图和专题地图。
- 土地调查:进行土地分类、土地权属界定和土地使用规划。
- 城市规划:辅助城市设计和基础设施规划。
- 环境监测:监测环境变化,如森林覆盖、水资源和污染状况。
- 灾害评估:评估自然灾害的影响范围和损失。
- 军事侦察:获取敌对地区的地理信息。
二、摄影测量学的发展历程1. 早期摄影测量(19世纪中叶-20世纪初)- 1839年,法国人达盖尔发明了银版照相法,这是摄影技术的起源。
- 1851年,瑞士工程师普雷斯特勒使用摄影方法绘制了第一张地形图。
- 1859年,法国人布洛克发明了立体测图仪,使得通过摄影图像进行三维测量成为可能。
2. 现代摄影测量(20世纪初-20世纪末)- 20世纪初,德国人奥佩尔提出了像片纠正和像片定向的理论,为摄影测量学的理论基础做出了贡献。
- 1930年代,随着航空技术的发展,航空摄影测量开始广泛应用。
- 1950年代,电子计算机的出现为摄影测量数据的处理提供了新的工具。
- 1960年代,数字摄影测量开始发展,利用计算机技术进行图像处理和分析。
3. 空间摄影测量(20世纪末-至今)- 1970年代,卫星遥感技术开始应用于摄影测量,提供了全球范围内的地理信息。
第四章 立体观察和立体量测4

第三节 像对的立体观察
建立人造立体视觉时,要求观察立体 像对的双眼分别只能观察其中的一张像 片,俗称分像. 观察时,一种是直接观察两张像片, 构成立体视觉,是借用立体镜来达到分 像.另一种是通过光学投影,将两张像 片的影像重叠投影在一起,称为分像法 的立体观察.
一,用立体镜观察立体
立体镜的主要作用是一只眼睛能清晰地 只看一张像片的影像. 最简单的立体镜是桥式立体镜,如下图 所示:
二,单测标量测法
单测标法是用一个真实测标去量测立体模 型,如图
第五节 像点坐标量测仪器
用解析方法处理摄影的像片时,都要首 先量测出像点的坐标x,y.量测这些数据的 专用一起,称为立体坐标量测仪.
蔡司(耶 拿) Stecomet er C型立 C型立 体坐标量 测仪
蔡司(上科恩)PSK型立体坐标量测仪 蔡司(上科恩)PSK型立体坐标量测仪
�
2,反立体效应 把左方摄站摄得的像片P1放在右方,用右眼观 察;右方摄站摄得的像片P2放在左方用左眼观察, 如图(b).这种立体效应称为反立体. 或是在组成正立体效应后,将左右像片各旋转 180°,如图(c),同样可得到一个反立体效应.
3,零立体效应 将正立体情况下的两张像片,在各自 的平面内按同一方向旋转90°,使像片 上纵横坐标互换了方向.像片上原来的 纵坐标y轴转到与基线平行,此时生理视 差变为像片的y方向的视差,因而失去了 立体感觉成为一个平面图像. 这种立体视觉,称为零立体效应.
第一节 人眼的立体视觉
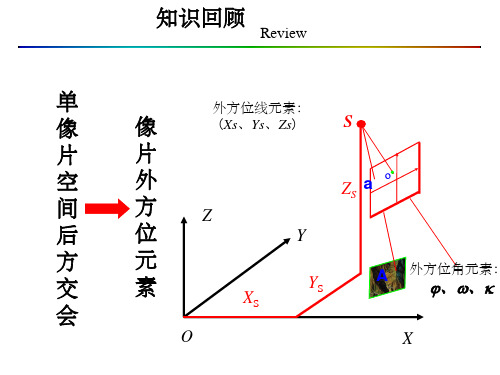
一,人眼观察物体的远近
人眼是一个天然的光学系统,结构复杂.
摄影测量中,正是根据人眼的立体视觉,对同 一个地区要在两个不同摄站点上拍摄两张像片, 构成一个立体像对,进行立体观察与量测. 那么,人的双眼为什么能观察景物的远近呢? 由于两点在眼 中构像存在着生 理视差σ,此种 由交会角不同而 引起的生理视差, 通过人的大脑就 能作出物体远近 的判断.
像对的立体观察与量测
3.5 像对的立体观察与量测
(1)人工立体观察 立体观察是指通过观
察立体像对来获得人造立 体效应的过程。
——单像量测 识别困难、量测精度低 ——立体观测 不仅增强了辨认像点的能 力,提高量测的精度,而 且可以提高效率。
山东科技大学测绘科学与工程学院
3.5 像对的立体观察与量测
(2)计算机自动匹配 优点:效率高、精度高。主要适用于空三连接点的 自动选取与转点、DEM自动采集。 缺点:地物识别难以自动化;大比例尺测图受地表 覆盖影响,DEM自动采集数据编辑难度大。
优点:不损失分辨率,亮度损失小;不会影响既有的设计架构,3D膜装配时不需 对准像素;可达到3D眼镜式立体显示效果且很容易做到立体格式的图像兼容。
缺点:只能中小尺寸使用,单人使用,立体视觉范围限于屏中心左右20°以内, 分光不可能完全隔离仍会出现左右眼图混叠现象。
分色、分光、分时技术的流程很相似,都是需要经过两次 过滤,第一次是在显示器端,第二次是在眼睛端。
裸眼立体 ① 障栅法技术; ② 微透镜法技术; ③ 指向光源技术
山东科技大学测绘科学与工程学院
3.5.1 像对的立体观察
3.5.1.4 分像方法
山东科技大学测绘科学与工程学院
立体显示技术
1. 眼镜式3D(with glasses) ◆被动式眼镜(passive glasses) 彩色眼镜(anaglyph) 偏振光眼镜( Polarizer glasses ) ◆主动式眼镜(active glasses ) 快門式眼镜( Shutter glasses )
网膜窝 巩膜
山东科技大学测绘科学与工程学院
3.5.1 像对的立体观察
3.5.1.1 视差理论 人眼的结构(构像系统)
立体观察与像点坐标量测(1)
人眼视轴活动范围: 左右 ±450 上下 +300 ,-500
人用双眼观察景物可判断远近,得到景物的立体效应,
这种现象称为人眼的立体视觉
A
S1 S2 双眼的光心
F 明视距离
F
A 大于明视距离
B
B 小于明视距离
物体距离眼镜的远 近直接与张角有关
S1
+ b1
f1 a1
- b+
双眼观察
S2 -
b2 a2 f2
: 两 个 偏 振 器 的 夹 角 。
在一像对的投影光路中放置一个偏振平面相互垂直的偏振器,以两 组横向光波波动成相互垂直方向的偏振光,将影像投影到共同的承 影面上,观察者戴上偏振光眼镜,两镜片的偏振片面相互垂直,与 投影光亮中偏振器平面垂直或平行,得到人造立体效能。
四、液晶闪闭法
液晶眼镜 红外发射器
即单眼能够判别最小物体的能力
单眼所能观察出两点间的最小距离称第一分辨力 单眼所能观察出两平行线间的最小距离称第二分辨力
第一分辨 0力 .003545
17 第二分辨 20力
双眼观察精度比单眼提高 2 倍
单眼观察
人眼视角: 左右 1600 上下 1200
清晰视角: 左右 1.50
利用单眼观察去决定 物体的远近是比较困 难的。
单像测量 发展
双像的立体测量
立体观察效果
1、正立体:如何获得?? 2、反立体:左右片对调或在各自平面内旋转180 3、零立体:原景物起伏消失的效应,旋转90
O1 a1 b1 P 1
O2 a 2 b 2 P2
O1
O2
P2 b 2 a 2 P1 b 1 a 1
A
A
B
B
工像对的立体观察和量测与标准式立体像对教学课件PPT程摄影测量学

角膜 虹膜
瞳孔 虹膜
水晶体 韧带
轴视 玻璃体
视网膜
盲斑
脉络膜
视神经
网膜窝 巩膜
1、视差理论
单眼观察
人眼视角: 左右 1600 上下 1200
清晰视角: 左右 1.50
利用单眼观察去决定 物体的远近是比较困 难的。
人眼视轴活动范围: 左右 ±450 上下 +300 ,-500
10
1、视差理论
双眼观察
S2
f
x
0 2
o2
X y2
x2
A h
x1 x2
左右视差:
fB Z
同名像点的横坐标之差,计作p
p x1 x2
p0
x
0 1
x
0 2
fB
fB
ZH
p0 f B H
H
f p0
B
31
3、标准式像对的几何关系
f H p0 B
Z H H1
Z Y
S1
B
f
y1
o1 x10 a1
x1 a2
h H1 H
fB fB
h H1 h
p10
X
A
A0
h Y
A0
可用于计算高差
34
本
•标准式像对的定义 •标准式像对的外方位元素
•标准式像对的几何关系
讲
•视差理论
小
•像对立体观察的条件
•像对立体观察的效果
•像对立体观察的工具
结 •分像方法
•测标
35
作 1、天然立体观察产生立体感觉的原因 是什么?像对立体观察产生立体感觉
业 的原因是什么?
Z Y
Z Y
摄影测量学教案(第09-2讲立体像对的观察和量测).doc
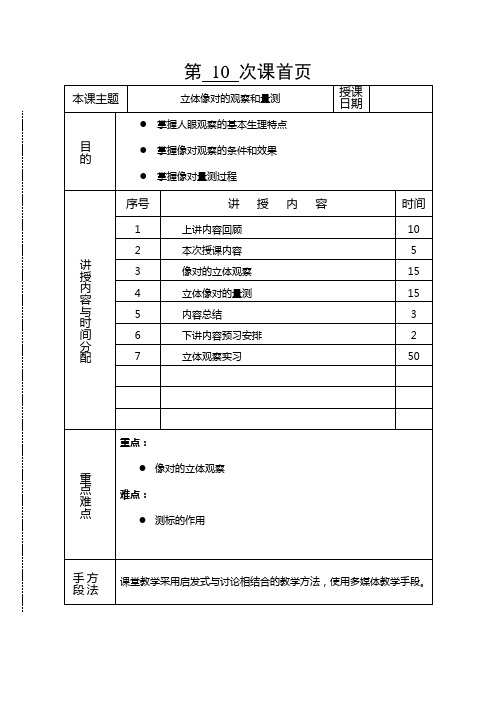
第10 次课首页
教案正文
单眼观察
人眼视角:左右 1600 上下 1200
清晰视角:左右 1.50
人眼视轴活动范围:
左右±450
上下 +300,-500
交会作用与调节作用的一致性 空间影像的形成 能够估计景深 对称点:
生理视差:
R R L L C A C A -
生理视差是产生立体感觉的生理基础。
、立体观察效果
①正立体如何获得??
②反立体
③零立体
4、立体观察工具
①袖珍立体镜
③立体量测观察系统
讨论:
视模型与几何模型关系??
、分像方法
直接对像对进行目视观察时,立体观察条件中,最难满足的是???
①互补色法
②偏振光法
③交替光阑法(闪闭法、光闸法)
④观察工具与立体量测观察设备
测标的作用
两像片共同相对测标作x1,y1运动,照准不同的像点。
右片相对于左片作x1方向的运动,量测p。
第10 次课尾页。
第四章立体观察与像点坐标量测(可编辑)
第四章立体观察与像点坐标量测第四章立体观察与像点坐标量测摄影测量教研室赵双明摄影测量教研室smzhao2000@sohu主要内容一、立体视觉原理一、立体视觉原理二、像对的立体观察二、像对的立体观察三、像点坐标量测三、像点坐标量测四、像片系统误差四、像片系统误差§4.1 立体视觉原理单眼观察景物,不能正确判断景物的远近;只有双眼观察景物,才能判断景物的远近,得到景物的立体效应,这种现象称为人眼的立体视觉。
′′σ =aba b交会角 r眼基线 br视距 L生理视差σ人造立体视觉人造立体视觉摄影测量中,利用相邻像片组成像对,左眼看左片,右眼看右片,可获得地面的立体模型,进行量测。
AB’PPab a’b’左眼右眼立体观察条件立体观察条件立体像对分像条件两像片上相同景物(同名像点)的连线与眼基线应大致平行左右像片比例尺应相近(差别15%)立体效应立体效应反立体正立体S SS SSSSS 2 2SS 2 2111111SS22ba aabb22b b 2b a b aa 2 11 a 11aa aa1 21 112 22 bb b1 b1 22112P 2P PP12 1222PPPP2211PP11ABB AA AAABBBB立体模型与实物相反立体模型与实物相同左右像片位置对调、或各旋转180 °起伏的视模型变平左右像片旋转90 °零立体§4.2 像对的立体观察光线照射透明的左右像片立体像对,光线照射透明的左右像片立体像对,使影像叠映在同一个投影面上,通过某使影像叠映在同一个投影面上,通过某种方式使得观察者左右眼睛分别看左右种方式使得观察者左右眼睛分别看左右两张影像,从而产生立体效应两张影像,从而产生立体效应§4.2 像对的立体观察立体镜观察叠影式的立体观察互补色法互补色法光闸法光闸法偏振光法偏振光法液晶闪闭法液晶闪闭法双目镜立体观察-立体坐标量测仪§4.2 像对的立体观察立体镜观察桥式立体镜在一个桥架上安置两个相同的简单透镜透镜光轴平行, 间距约为眼基距,高度等于透镜主距§4.2 像对的立体观察立体镜观察反光立体镜扩大眼基距,可对大像幅进行立体观察§4.2 像对的立体观察叠影式的立体观察互补色法在投影器中插入互补色滤光片(品红色、蓝绿色)。
第四章 立体观察与立体量测

第四章 立体观察与立体量测单张像片只能研究地物平面信息,而当具有对同一地区从两个不同方位摄取的重叠立体像对时,则可构成立体模型来解求地面物体的空间位置。
在解求地面三维坐标中首先要求观察和量测立体模型,这些都是摄影测量的基础。
立体观测方法不仅能够增强辨认像点的能力,而且可以提高量测的精度。
因此在摄影测量中,立体观察和立体量测得到了广泛应用。
本章主要介绍立体观察原理、方法和立体量测仪器及其作业方法。
§4.1 人眼构造和立体视觉一、人眼构造人眼是一个结构复杂的天然光学系统,图4-1-1是人眼结构示意图。
它就象一架完善的,能自动调节的摄影机。
水晶体好比摄影物镜,能自动改变焦距,使观察不同远近物体时,在视网膜上都能得到清晰的物像。
瞳孔如同光圈,网膜就象底片,能够接收影像信息。
网膜上起感觉作用的是锥体色素细胞和柱状感光细胞,感光最敏锐的地方称为黄斑。
黄斑在网膜的中央,大小约为0.9×0.6毫米,其中感光力最强的部分称为网膜窝。
通过网膜窝中心和水晶体节点的直线称为眼睛的视轴。
它与水晶体的光轴很相近,但并不一致。
二、立体视觉单眼观察物体时,我们所感觉到的仅是物体的透视像,好象观看一张像片一样。
单眼观察不能够确定物体的远近,只能凭经验间接地判断。
只有用双眼观察景物,才能判断景物的远近,得到景物的立体效应,这种现象称为人眼的立体视觉。
摄影测量中,正是根据这一原理,对同一地区要在两个不同摄站点上拍摄两张具有一定重叠度的像片,构成一个立体像对,进行立体观察与量测。
当人的双眼注视于某物点A 时(图4-1-2 ),两眼的视轴本能地交会于该点,此时,两视轴相交的角度γ叫做交会角。
在两眼交会的同时,眼睛水晶体自动调节焦距,得到最清晰的影像。
交会和调节焦距这图4-1-2 人眼立体视觉图4-1-1 人眼的构造两项动作,是本能地同时进行的,人眼的这种本能称为凝视。
两眼凝视于一点时的交会角大小与物体离眼睛的距离远近有关,一定的交会角就代表了一定的距离,人眼的功能可本能地反映出交会角的差异,因而可以直接地判断物体的远近。
4立体观察与立体量测
b1
'
a2
b2
S1
b1
b
S2
b2 a2
b1
S1
b
S2
b2 a2
a1
a1
2、视差理论
当人用双眼观察空间远近 不同的景物A、B两点时,两
眼产生生理视差,获得立体
视觉,可以判断景物的远近。
生理视差: η=ALCL-ARCR 生理视差是产生立体感 觉的生理基础。
二、人造立体视觉
空间景物在感光材料上构像,再用人眼立体观察构像的像 片而产生生理视差,重建空间景物立体视觉。这样的立体视 觉称为人造立体视觉,所看到的的立体模型称为视模型。
和其它光学装置组成。左右像点分别经棱镜折射、透镜放大、再一次
折射后传入目镜,观察者左眼看左像,右眼看右像得到立体效应。
二、立体量测
1、立体量测的目的
对立体模型进行立体量测的目的是得到左右像点的坐标量测值x1、y1、 x2、y2 。其中,同名像点的x坐标之差x1-x2和y坐标之差y1-y2分别称为左 右视差和上下视差,用p和q表示。然后利用像点坐标与相应的地面点坐 标之间的关系式——共线条件方程式和各片的外方位元素,解求相应模 型点的模型坐标等参数。
何模型进行量测,直接给出符合规定比例尺的地形图,获取地理基础信 息。使用一个立体像对构建地面立体模型的方法也称为立体摄影测量。
理论基础:摄影时摄影基线、同名射 线、同名像点与地面点之间有着固定 的几何关系,它可以通过恢复像对的 内外方位元素来实现,进而能够重建 与实地相似且符合比例尺及空间方位 的几何模型。
自动变焦,在网嫫窝(如 同底片)上得到清晰的像, 眼睛瞳孔的作用好似光圈。
单眼观测景物时,感觉到的仅仅是景物的透视像,就像像片一样, 不能正确判断景物的远近,只能凭经验去间接地判断。只有用双眼观
【武汉大学-摄影测量学-立体观察与像点坐标量测】4.3.4像点坐标量测及系统误差改正
摄影测量基础
上下视差(q)读数鼓
(最小分划值0.01mm)
立体量测基本原理
左右视差(p)读数鼓
(最小分划值0.005mm)
y 读数鼓
(最小分划值0.02mm)
x 读数鼓
(最小分划值0.02mm)
左右视差手轮
X 手轮
Y 手轮
上下视差环
原民主德国蔡司厂生产的Steko 1818 立体坐标量测仪
武汉大学
摄影测量基础
立体坐标量测仪
原联邦德国欧波同厂 PSK-2 精密立体坐标量测仪
武汉大学
摄影测量基础
立体坐标量测仪
瑞士威特厂 BC2 解析测图仪
武汉大学
摄影测量基础
立体坐标量测仪
数字摄影测量工作站
武汉大学
摄影测量基础 光学框标
解析内定向
机械框标
武汉大学
摄影测量基础
利用平 面相似 变换, 将仪器 坐标变 换为以 像主点 为原点 的像平 面坐标
v=Ax l
4、构建法方程并解算
x=( AT A)1(ATl)
5、由变换参数计算像点坐标
解析内定向步骤
武汉大学
摄影测量基础
像片系统误差源
❖ 摄影机的系统误差 ❖ 底片变形 ❖ 运载平台带来的系统误差 ❖ 大气折光误差 ❖ 地球曲率的影响 ❖ 摄影处理与底片复制中的系统误差 ❖ 观测系统误差
武汉大学
武汉大学
摄影测量基础
立体量测步骤
仪器归零:各个手轮应放在零读数(X0,Y0,p0,q0)位置上,左、右测
标分别对准左、右像片盘的中心,使仪器坐标系与像片坐标系重合
像片定向:转动 X 手轮,单眼观察测标的移动看是否沿像片上的 x
摄影测量学教案(第09-2讲立体像对的观察和量测).全解
第10 次课首页
教案正文
单眼观察
人眼视角:左右 1600 上下 1200
清晰视角:左右 1.50
人眼视轴活动范围:
左右±450
上下 +300,-500
交会作用与调节作用的一致性 空间影像的形成 能够估计景深 对称点:
生理视差:
R R L L C A C A -
生理视差是产生立体感觉的生理基础。
、立体观察效果
①正立体如何获得??
②反立体
③零立体
4、立体观察工具
①袖珍立体镜
③立体量测观察系统
讨论:
视模型与几何模型关系??
、分像方法
直接对像对进行目视观察时,立体观察条件中,最难满足的是???
①互补色法
②偏振光法
③交替光阑法(闪闭法、光闸法)
④观察工具与立体量测观察设备
测标的作用
两像片共同相对测标作x1,y1运动,照准不同的像点。
右片相对于左片作x1方向的运动,量测p。
第10 次课尾页。
07立体像对解析
N1
N2
B p
p
x1
x2
Z
A
f
Z S1
B
B mA
X
A
X S1
B p
x1
X
S1
B
B p
x2
YA
YS1
B p
y1
YS1
B p
y2
B
B
Z A ZS1 p f ZS2 p f
计算过程
获取已知数据x0 , y0 , f , XS1, YS1, ZS1, 1, 1, 1 , XS2, YS2, ZS2 , 2, 2, 2 量测像点坐标 x1,y1 , x2,y2 由外方位线元素计算基线分量 BX, BY, BZ 由外方位角元素计算像空间辅助坐标 X1, Y1, Z1 , X2, Y2, Z2 计算点投影系数 N1 , N2 计算地面坐标 XA, YA, ZA
P1
P2
P1
P2
立
S1
S2
S1
S2
P2
P1
S1
S2
体 E
像 理想像对
正直像对
E
E
竖直像对
对 相邻两像
分
片水平、 摄影基线
类
水平组成 的像对
相邻两像 片水平、 摄影基线 不水平组 成的像对
相邻两像 片不水平、 摄影基线 不水平组 成的像对
二、立体像对前方交会的定义
z1
y1
x1 S1
Z a1(x1,y1)
z2
y2
S2 a2(x2,y2)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§4.3 像点坐标获取
BC2解析测图仪
§4.3 像点坐标获取
数字摄影测量工作站
§4.3 像点坐标获取
光学框标
机械框标
解析内定向
• 利用平 面相似 变换, 将像片 架坐标 变换为 以像主 点为原 点的像 平面坐 标
正形变换
x a0 a1xa2y y b0 a2xa1y
§4.1 立体视觉原理
单眼能够判别最小物体的能力称单眼分辨力
人
用单眼所能观察出两点间的最小距离称第一分辨力
眼
用单眼所能观察出两平行线间的最小距离称第二分辨力
分 辨
第一分辨 = 力0.003545
17
力
第二分辨 2力 0
双眼观察精度比单眼提高 2 倍
§4.1 立体视觉原理
人用双眼观察景物可判断其远近,得到景物的立体效应, 这种现象称为人眼的立体视觉
像点坐标计算
正形变换
x a0 a1xa2y y b0 a2xa1y
仿射变换
x a0 a1xa2y y b0 b1xb2y
双线性变换
xa0a1xa2ya3xy yb0b1xb2yb3xy
y
y’ x’
x
❖ 摄影机的系统误差
❖ 底片变形
像
片
❖ 航摄飞机带来的系统误差
系
❖ 大气折光误差
统
❖ 地球曲率的影响
人 眼 立 体 视 觉
生理视 = a差 b ab
§4.1 立体视觉原理
交会角 r
人 眼
眼基线
br
视距 L
生理视差 σ
的 眼主距
fr
观
察 能
当人眼观察50m处景物时,设双眼观察的
tan( ) b r 2 2L
力
分辨力为30〞,人眼基线长65mm,人眼 主距17mm,则dL=5.6m
br L
d br dL
上的x轴向运动,若测标不在x轴向上,则需要用螺旋旋转像
片,使测标保持在x轴上移动
像点量测:移动X,Y,p,q手轮,使测标立体切准量测像
点,并记下相应读数鼓上的读数 x,y,p,q
坐标计算: xa=x-x0, ya=y-y0; xa’=xa-(p-p0), ya’=ya-(q-q0 )
§4.3 像点坐标获取
法
光闸起闭频率>10Hz
§4.2 像对的立体观察
➢叠映影像立体观察
像
对 的
偏振光法
立
体
在两投影光路中安装两块偏振
观
平面互成90°的起偏镜
察
方
观测者带上一副检偏镜
法
镜片与起偏镜相同
左右偏振平面相互垂直
§4.2 像对的立体观察
➢双目镜观测光路的立体观察
像
对
的
立
体
通过双筒望远镜观察
观
每个望远镜像面有一固定的测标
察
与眼基线应大致平行
的 条
两像片的比例尺应相近(差别<15%)
件
正立体
S1
S2
b1 P1
a1 b2
a2 P2
立体效应
反立体
S1
S2
b2 P2
a2 b1 a1 P1
反立体
S1
S2
a1 b1 a2 P1
b2 P2
B A
立体模型与实物相似
A
A
B
B
立体模型与实物相反
(正立体效应基础上左右像片旋转180°)
§4.2 像对的立体观察
➢叠映影像立体观察
像
对
的
互补色法
立
体
观
在投影器中插入互补色滤光片
察
(品红色、蓝绿色)
方
法
观测者双眼分别带上同色镜片
§4.2 像对的立体观察
➢ 叠映影像立体观察
像
对
光闸法
的
立
体 观
在两投影光路中各安装一光闸 (一个打开、一个关闭)
察
观测者双眼分别带上与投影器
方
光闸同步的光闸眼镜
仿射变换
x a0 a1xa2y y b0 b1xb2y
双线性变换
xa0a1xa2ya3xy yb0b1xb2yb3xy
y
y’ x’
x
解析内定向计算过程
1、获取框标点的理论坐标 2、选用合适的变换模型 3、建立误差方程
v= A xl
4、建立法方程并解算
x=A(TA)1(ATl)
5、由变换参数计算像点坐标
x,y 为像点坐标的改正值
像片系统误差预改正(摄影机物镜畸变差)
精品jing
07立体观察与像点坐标量测
主要内容
一、立体视觉原理 二、像对的立体观察
§4.1 立体视觉原理
人
眼
基
本
构
造
视网膜上大约有108个杆状细胞,直径2mm ;
6.5×106个锥状细胞,直径2~8mm
§4.1 立体视觉原理
人 眼 来自物体的光刺激视网膜的杆状和锥状细胞( 感 物理过程)使其感光(生理过程),通过视神 知 经纤维传至后大脑视觉中心,经记忆加入已有 过 的概念与经验(心理过程),从而形成感知 程
人眼分辨远近物点的极限距离 Lm= axbm r i n3 60 5207 6495m 20
L2
d L b rd r L 2 σ
2
br fr
§4.1 立体视觉原理
人
A
造
B
立
体
视 觉
Pa b
a’ b’ P’
的
产
生
左眼
右眼
§4.1 立体视觉原理
人 立体像对 造 立 分像条件
体 观
两像片上相同景物(同名像点)的连线
零立体:起伏的视模型变平(正立体效应基础上左右像片旋转90°)
§4.2 像对的立体观察
➢立式立体镜
体
观 察
在一个桥架上安置两个相同的简单透镜
方
法
透镜光轴平行,间距约为眼基距,高度等于透镜主距
§4.2 像对的立体观察
➢立体镜观察
像
对
的 立
反光立体镜
体
观
察
方
法
扩大眼基距,可对大像幅进行立体观察
误
差
❖ 摄影处理与底片复制中的系统误差
源
❖ 观测系统误差
像片系统误差预改正(摄影材料变形)
• 四个框标位于像片的四个角隅时 可用仿射变换
x a0 a1xa2y y b0 b1xb2y
• 四个框标位于像片的中央时可用 比例缩放
x x Lx lx
y x Ly ly
Lx,Ly为框标距的理论值 lx,ly为框标距的量测值 x’,y’为像点坐标的量测值
察
方 法
像片可在两个相互垂直方向共同移动,也可一张像片相对于另一 张像片移动
可以分别对左右像片进行调焦、亮度调节及必要旋转,观测系统 放大倍率可调节
§4.3 像点坐标获取
S1
S2
立
体 量
a
a’
测
原
理
A’
A A”
§4.3 像点坐标获取
立 体 量 测 原 理
左右像片同名像点的坐标量测值为(xa,ya),( xa’,ya’ ) 左右视差 p= xa – xa’ 上下视差 q= ya – ya’
§4.3 像点坐标获取
上下视差(q)读数鼓
左右视差(p)读数鼓
x读数鼓
左右视差手轮
X手轮
Y手轮
上下视差环
Steko 1818 型立体坐标量测仪
立体坐标量测步骤
仪器归零:各个手轮应放在零读数(x0,y0,p0,q0)位置上,
左、右测标分别对准左、右像片盘的中心即仪器坐标系与像片 坐标系重合
像片定向:移动X手轮,单眼观察测标的移动看是否沿像片