第三章_摄影测量基础知识(三)
合集下载
摄影测量基础知识
投影射线平行于某一固定方向的投影的投影称为平行投影
斜投影 投影射 线与投 影平面 斜交
正射投影 投影射线 与投影平 面正交
§3-2
中心投影的基本知识
一 、中心投影与正射投影
1、正射投影、中心投影
航片是地面景物的中心投影; 地形图(包括影像地图)是地面景物的正射投影;
§3-2
中心投影的基本知识
一 、中心投影与正射投影
p p % 100 % l
相邻航线上的像片影像重叠程度。
І-1
旁 向 重 叠 度
l
q
Ⅱ-1
q q % 100 % l
航向相邻两个摄影站间的距离D
摄影基线
B m l (1 p%)
P2
S2
摄 影 基 线
P1
S1
B
D m l (1 q%)
E
§3-1
航空摄影
二 、空中摄影过程
c
V
ho hcC
O E
V
T
重 要 的 点 线
点:摄影中心S 像主点o 地主点O 像底点n 地底点N 等角点c 地面等角点C
面:地面E 像片面P 主垂面W 真水平面Es 线:迹线TT 主光线SoO 主垂线SnN 摄影方向线VV 主纵线vv 等角线ScC 主合线hihi 主横线hoho 等比线hchc
又称为方向余弦。
§3-6
像点的空间直角坐标变换与构像方程
一 、像点的空间坐标变换式
R矩阵为正交矩阵。
x u a1 b1 c1 u y R 1 v a b c v 2 2 2 f w a3 b3 c3 w a1U b1V c1W a2U b2V c2W a3U b3V c3W
摄影测量学第三章像点位移与方向偏差PPT课件

02
它反映了地物在像片上的位置变 化,是立体观察和量测的基础。
像点位移的原因和影响
原因
摄影中心与投影中心的不重合是导致像点位移的主要原因。
影响
像点位移会影响立体观察的效果和量测精度,因此需要进行 校正。
像点位移的测量和计算
测量方法
可以采用立体量测仪进行像点位移的 测量,通过比较同名像点的位置差异 来获取位移值。
课程目标和意义
掌Hale Waihona Puke 像点位移和方向偏差的概念、 产生原因及对摄影测量精度的影
响。
学习如何减小像点位移和方向偏 差的方法,提高摄影测量的精度。
通过案例分析,加深对像点位移 和方向偏差的理解,提高解决实
际问题的能力。
02 像点位移
像点位移的定义
01
像点位移是指摄影像片上同名像 点在立体观察时,由于摄影中心 与投影中心的不重合而产生的移 动。
在实际应用中,可以采用先进的摄影测 量技术和方法,如数字摄影测量、自动 化测图等,以提高测量精度和效率。
通过建立数学模型,将像点位移和方 向偏差对测量结果的影响进行量化, 以便进行误差分析和精度评估。
05 实际应用案例
航空摄影测量中的像点位移和方向偏差
航空摄影测量是利用航空器上安装的摄像设备,对地面物体进行拍摄,然后通过处理这些照 片来获取地形信息的方法。在航空摄影测量中,像点位移和方向偏差是常见的问题,它们会 对测量结果造成影响。
三维重建中的像点位移和方向偏差处理
三维重建是指利用多张照片或者多个角 度的影像来重建物体三维表面的方法。 在三维重建中,像点位移和方向偏差的
处理也是非常重要的。
像点位移和方向偏差会导致重建的三维 模型与实际物体存在偏差,影响重建结 果的精度和可靠性。因此,需要进行一
它反映了地物在像片上的位置变 化,是立体观察和量测的基础。
像点位移的原因和影响
原因
摄影中心与投影中心的不重合是导致像点位移的主要原因。
影响
像点位移会影响立体观察的效果和量测精度,因此需要进行 校正。
像点位移的测量和计算
测量方法
可以采用立体量测仪进行像点位移的 测量,通过比较同名像点的位置差异 来获取位移值。
课程目标和意义
掌Hale Waihona Puke 像点位移和方向偏差的概念、 产生原因及对摄影测量精度的影
响。
学习如何减小像点位移和方向偏 差的方法,提高摄影测量的精度。
通过案例分析,加深对像点位移 和方向偏差的理解,提高解决实
际问题的能力。
02 像点位移
像点位移的定义
01
像点位移是指摄影像片上同名像 点在立体观察时,由于摄影中心 与投影中心的不重合而产生的移 动。
在实际应用中,可以采用先进的摄影测 量技术和方法,如数字摄影测量、自动 化测图等,以提高测量精度和效率。
通过建立数学模型,将像点位移和方 向偏差对测量结果的影响进行量化, 以便进行误差分析和精度评估。
05 实际应用案例
航空摄影测量中的像点位移和方向偏差
航空摄影测量是利用航空器上安装的摄像设备,对地面物体进行拍摄,然后通过处理这些照 片来获取地形信息的方法。在航空摄影测量中,像点位移和方向偏差是常见的问题,它们会 对测量结果造成影响。
三维重建中的像点位移和方向偏差处理
三维重建是指利用多张照片或者多个角 度的影像来重建物体三维表面的方法。 在三维重建中,像点位移和方向偏差的
处理也是非常重要的。
像点位移和方向偏差会导致重建的三维 模型与实际物体存在偏差,影响重建结 果的精度和可靠性。因此,需要进行一
摄影测量坐标系ppt课件
像 片 外 方 位Z 角 元 素
D
像片倾角
Z zy Y
x s
o
Y
X
像片旋角
v
N
方位角
A
X
§3.6 像点的空间直角坐标变换 与中心投影构像方程
一
像
点 x x'cos y'sin 的 y x'sin y'cos
y y’
a x’
平 面
o
x
坐 标
x
y
cos sin
sin x
cos
y
变
X A
YA
Z A
Xs Ys Zs
X x a1 a2 a3 x
Y
Z
R y f
bc11
b2 c2
b3 c3
y f
x f a1 ( X A X s ) b1 (YA Ys ) c1 (Z A Z s ) a3 ( X A X s ) b3 (YA Ys ) c3 (Z A Z s )
cos
0
0 sin cos sin 0 cos 0
0 1
a1 a2 a3
b1
b2
b3
c1 c2 c3
2、以X 轴为主轴的’-’-’转角系统的坐标变换
a1 coscos a2 cossin a3 sin b1 cossin sin sin cos b2 coscos sin sin sin b3 sin cos c1 sin sin cossin cos c2 sin cos cossin sin c3 coscos
正交变换矩阵的特点
a2 1
a22
a32
1
b2 1
b2 2
第03讲-空中摄影基本要求与中心投影--2010测绘定单

航片旋转角:
本航线中相邻像片主点的连线与同方向像片边框 方向的夹角称为航片旋偏角,航片旋偏角一般不得大 于6o
6
0
3、航空摄影的技术计划
航摄任务书(用户与航空摄影作业单位的合同) 航摄技术计划的拟订 航空摄影
3、航空摄影的技术计划 航摄任务书
1、划定航摄区域范围(用经纬度将摄区范围标出来), 并附一张摄区略图。 2、规定航空摄影比例尺(与成图比例尺有关)。 3、规定航摄仪类型和焦距。 4、规定航空摄影的技术要求。 5、完成任务的期限和成果上交的次序。 6、应交的航摄资料(负片、像片、航摄质量鉴定表、 航摄仪技术数据表、GPS记录)。
2、透视变换及其特别点、线、面 2.1透视变换定义
P
两个平面之间 的中心投影变换, 称为透视变换。
S
E
2、透视变换及其特别点、线、面 2.2透视变换中的特别面
特殊面(2): 主垂面(W) 真水平面( Es )
S
hc T J n (V) v N c hi P Es v
ho
i W o hi
ho hcC
S iab hi hi
a tab T A
b
T
B
迹点
2、透视变换及其特别点、线、面 2.6透视变换作图
已知E平面上有AB直线,在像平面上作对应的像ab hi P 1)找迹点 2)找合点i1 3)连T1i1与SA, 交点为a, 连T1i1与SB, 交点为b V B A
S
a
i v
i1 hi
T1
V E v
b
2、透视变换及其特别点、线、面 2.6透视变换作图
相邻航线之间的重叠称为 旁向重叠。 Ly py І-1
py py% 100 % Ly
摄影测量基础知识PPT课件
摄影测量的主要任务之一:把地面按中心投影规律获取 的摄影比例尺航摄像片转换成以测图比例尺表示的正射 投影地形图
.
28
三、航摄像片上特殊的点、线、面
将空间点、线作中心投影,在投影平 面P上得到一一对应的点、线,这种 经中心投影取得的一一对应的投影关 系称为透视变换
.
29
航摄像片中的重要点、线、面
Es S ho
例 尺
大比例尺 中比例尺
1:4000 ~1:6000 1:8000 ~1:12000 1:15000~1:20000 1:10000~1:35000
1:1000 1:2000, 1:5000 1:5000 1:10000
小比例尺
1:20000~1:30000 1:35000~1:55000
1:25000 1:50000
式中m为像片比例尺分母,f为摄影机主距,H为摄影高度或称航 高。
按照摄影测量要求,像片比例尺分母的相对误差一般不应超过5 %。因此,空中摄影测量飞行航高H的变换量也称航高差应限 制为:
.
15
另外,测量规范还规定同一航带内最大航高与最小航高 之差不得大于30m;摄影区域内实际航高与设计航高 之差不得大于50m。
的像对
p1
p2 p1
P2
S1
S2
S1
S2
理想像对
E 正直像对
.
E
19
7同名光线、同名像点、核线、核面
摄影基线
S1
同名像点
p1 l1
核面
S2
同名核线
p2 l2
A
.
20
核面:摄影基线与同一地面点发出的两条 同名光线组成的面
核线:核面与左右像片面的交线为同名核 线
第3章 摄影测量基础知识(1-4)
《摄影测量学》
第三章 摄影测量基础知识
主要内容
一、航空摄影 二、中心投影与正射投影 三、航片上的点、线、面 四、摄影测量常用坐标系 五、像片的内、外方位元素 六、坐标变换 七、中心投影构像方程 八、像点位移
§3-1 航空摄影
一、摄影比例尺与摄影航高
摄影比例尺:航摄像片上一线段与 地面上相应线段水平距离之比 。
2.像片的重叠 航向重叠:同一航线内相邻像片之间的影像重叠60%-65%,最 小>53%
H = ml f B = ml( 1 − p%) L=l
旁向重叠:相邻航线之间的影像重叠,30%-40%最小>15%
q% L
L
(1 − q %) L
3.像片倾角 摄影机轴与铅直方向的夹角 α 垂直摄影:像片倾角小于<2 ,最大不超过3
作用:描述像点在像空间的位置 原点:摄影中心S 坐标轴:x、y轴与像平面坐标系的轴平行,z轴与摄影机轴重合
(x, y,−f )
三、像空间辅助坐标系(右手直角坐标系) S − uvw
作用:过渡性坐标系 原点:摄影中心S 坐标轴:视需要而定(怎样取? )
1. uvw 轴分别平行于地面 摄影测量坐标系 D − XYZ
•航空摄影时像片不能严格保持水平 •地形起伏
1 l = m L
因此航摄像片上的影像比例尺处处不等,摄影 比例尺是平均比例尺
航高:取摄区内的平均高程面作为 摄影基准面时,摄影机的物镜中心 至该面的距离,一般用H表示。
f 1 = m H
绝对航高:摄影瞬间摄影机物镜中心相对于平均海水面 的航高。 相对航高:摄影瞬间摄影机物镜中心相对于其它某一基 准面或某一点的高度。
2. 以每条航线第一张像片的像空间坐标系作为像空间辅助坐标系
第三章 摄影测量基础知识
主要内容
一、航空摄影 二、中心投影与正射投影 三、航片上的点、线、面 四、摄影测量常用坐标系 五、像片的内、外方位元素 六、坐标变换 七、中心投影构像方程 八、像点位移
§3-1 航空摄影
一、摄影比例尺与摄影航高
摄影比例尺:航摄像片上一线段与 地面上相应线段水平距离之比 。
2.像片的重叠 航向重叠:同一航线内相邻像片之间的影像重叠60%-65%,最 小>53%
H = ml f B = ml( 1 − p%) L=l
旁向重叠:相邻航线之间的影像重叠,30%-40%最小>15%
q% L
L
(1 − q %) L
3.像片倾角 摄影机轴与铅直方向的夹角 α 垂直摄影:像片倾角小于<2 ,最大不超过3
作用:描述像点在像空间的位置 原点:摄影中心S 坐标轴:x、y轴与像平面坐标系的轴平行,z轴与摄影机轴重合
(x, y,−f )
三、像空间辅助坐标系(右手直角坐标系) S − uvw
作用:过渡性坐标系 原点:摄影中心S 坐标轴:视需要而定(怎样取? )
1. uvw 轴分别平行于地面 摄影测量坐标系 D − XYZ
•航空摄影时像片不能严格保持水平 •地形起伏
1 l = m L
因此航摄像片上的影像比例尺处处不等,摄影 比例尺是平均比例尺
航高:取摄区内的平均高程面作为 摄影基准面时,摄影机的物镜中心 至该面的距离,一般用H表示。
f 1 = m H
绝对航高:摄影瞬间摄影机物镜中心相对于平均海水面 的航高。 相对航高:摄影瞬间摄影机物镜中心相对于其它某一基 准面或某一点的高度。
2. 以每条航线第一张像片的像空间坐标系作为像空间辅助坐标系
摄影测量课件-摄影测量基础知识
攝影比例尺定義:
嚴格定義: 1 l
mL
航攝像片上影像線段的長 地面上對應線段的水準距離
攝影比例尺是像片的平均比例尺
f
:
攝影機主距
1 m
f H
H:攝影航高,以攝區內的平均高程面作為攝影基
準面,攝影機的物鏡中心至該面的距離。(攝影瞬
間攝影機物鏡中心相對於平均海水面的航高稱為絕
對航高。相對於其他某一基準面或某一點的高度均
航空攝影的過程中,我們所關心的區域往 往是要大於一幅影像所覆蓋的區域,這時 候
想想:攝影基線和像片的重疊度有什麼關係?
如果同樣的像幅大小,採用大比例尺和採 用小比例尺攝影基線長度一樣嗎?
攝影基線B 攝站點 航空攝影略圖
攝影方式
❖ 豎直航空攝影:航攝儀在曝
光瞬間物鏡主光軸與地面垂
直,通常規定像片傾角小於
一般情況下,要求航向重疊度最好為60%-65%,最小不 能少於53%;旁向重疊要求30%-40%,最小不少於15%。
思考:如果像幅是23cm*23cm,攝影比例尺是 1:10000,那麼這個像幅所覆蓋的實地面積是多大?
如果是1:50000的比例尺,面積又是多少?
23cm*10000* 23cm*10000=2.3km*2.3km 影:以飛機作為主要工作平
臺,把航攝儀安裝在航攝飛機上,
從空中一定角度對地面物體進行攝
影,飛行航線一般為西東方向,航
攝機在攝影曝光的瞬間物鏡主光軸
保持垂直地面。
而在攝影測量學中我們講的航空攝 影是主要是我們高精度的測繪地形 圖或者是進行4D產品的生產所進行 的空中攝影稱為航空攝影。我們研 究的範圍比較窄一些,而且主要指 的是針對地面進行攝影。
三、攝影測量生產對攝影資料的基本要求
摄影测量学基础第3章 单张像片的解析基础
• 此 外 : 航向、旁向重叠度小于最低要求时,称航摄 漏洞,需要在航测外业做补救。当摄区地面起伏较 大时,还要增大重叠度,才能保证像片立体量测与拼 接。
• 应当指出,随着航空数码相机的应用,已有航向重叠 度大于80%、旁向重叠度在40%~360%的大重叠度 航空摄影测量出现;利用三线阵传感器摄影,还可具 有100%的重叠度。
3、中心投影 [Central Projection]
所有投射线或其延长线都通过一个固定点的投影,叫做 中心投影。投影光线会聚的点S称为投影中心。
负片位置: 正片位置:
投影中心
-摄站
投影中心位于物体和投影平面之间。 投影中心位于物体和投影平面同侧。
S
S
S
§3.2 中心投影
4、中心投影主要特性 [Main Features of Central Projection]
投射线互相平行的
投射线垂直于投影平面的
投影,叫做平行投影。 平行投影称为正射投影。
§3.2 中心投影
2、平行投影与正射投影
[Parallel Projection & Orthographic Projection ]
AB
D C
地形图 a0 b0 c0 d0
地形图在局部范围内是地面的正射投影!
§3.2 中心投影
受技术和自然条件限制,飞机往往不能按预定航线飞行 而产生航线弯曲,造成漏摄或旁向重叠过小。一般要求航 摄最大偏距与全航线长之比不大于3%。
5、像片旋角
相邻像片的主点连线与像幅沿航线方向两框标连线间的 夹角称为像片旋角。
有像片旋角k会使重叠度受到影响,一般要求不超过60, 最大不超过80。
航线方向
航线方向
摄影测量学 第三章像点位移与方向偏差
1. 因地面不水平,像片有倾斜,影 像上的任何像点均存在像点位移, 所以航摄像片上很难找到影像比 例尺完全相同的部分
2. 像片比例尺一般作为航摄计划而 设计的摄影比例尺
3. 地形摄影测量的任务就是要将没 有统一比例尺的航摄像片变成固 定比例尺的地形图
l f
S
H L
1l f mLH
本讲参考资料 教材
s
a bc p
C AB
像片倾斜引起的 像点位移
s
a
b0
a0 b
p
A
E
B0
A0
B
地形起伏引起的 像点位移(投影差)
一、定义
a0
a b0
b
c
从航摄像片上某点作出的方向线与地面对应点所画出的 方向线的方位角不相等,这种差异称为方向偏差
二、倾斜像片与水平像片的坐标关系式
xt
f
a1x a2 y a3 f c1x c2 y c3 f
yt
f
b1x b2 y b3 f c1x c2 y c3 f
S
P
a
c at Pt
当取像片主纵线为y轴、摄影方向线为Y 轴,且转角 系统为A--v时,有A=v= 0
x
xt f y sin f cos
yt
f
y cos f sin y sin f cos
三、像片倾斜引起的像点位移
xn x
yn yonyf tg
x
t n
xt
y
t n
yt
x
t n
f
f xn cos yn sin cos
y
t n
f
f yn cos2 yn sin cos
S f
第3章 摄影测量基础知识汇总

相邻像片间具有一定的重叠。
以测图为目的进行的航空摄影多取用竖直摄影 方式 。
三、摄影测量生产对摄影资料的基本要求
1.影像色调的要求 像片清晰、色调一致、反差适中
2. 对像片倾斜角的要求
航空摄影时,一般要求倾角不大于2度,最大不超过3度。
3.对像片重叠的要求
• 航向重叠与旁向重叠
航向重叠:同一航线内 相邻像片应有一定范围 的影像重叠
三、中心投影的正片位置与负片位置
负片位置(阴位):投影平面与物点在投影中 心的两侧 正片位置(阳位):投影平面与物点在投影中 心的同侧
S
S
阳位与阴位之间 的关系及转换
b' a'
f S
f
主距 Principal distance
ab A
B
无论正片位置还是负片位置,像点与物点的几何 关系不变,数学表达式不变
1:500 1:1000
1:8000—1:12000 1:2000
中比例尺 小比例尺
1:15000—1:20000 (23cm×23cm)
1:10000—1:25000 1:25000—1:35000 (23cm×23cm) 1:20000—1:30000
1:35000—1:55000
1:5000
1:10000 1:25000 1:50000
3.3 航摄像片上特殊的点、线、面
透视变换定义 (Definition of the Perspective Transform)
P S
两个平面之间 的中心投影变换, 称为透视变换。
在透视变换的 情况下,投影中心 称为透视中心。
T
1.航摄像片上的重要点、线、面
ES S
3摄影测量基本知识
b1 b2 b3 c1 1 0 0 c2 = 0 1 0 c3 0 0 1
a3 a1 b3 ⋅ a2 c3 a3
摄影测量基本知识
五、中心投影构像方程(共线方程)
n 旋转矩阵R中方向余弦的关系
Ø 同一行(列)的各元素自乘之和为1; Ø 任意两行(列)对应元素互乘之和为0; Ø 行列式为1
S f
y
x0
O y0
x
摄影测量基本知识
四、航摄像片的内外方位元素
w S φ Zs o v u y κ x
三个线元素
X S、 YS、 Z S
ω
ϕ、ω、κ
Z Y D D Ys Xs X
三个角元素
摄影测量基本知识
四、航摄像片的内外方位元素
1)以Y轴为主轴的ϕ、 ω 、 κ Z Y S y Zs Z Y Ys N A Xs ϕ κ x ω ox X o X 航向倾角ϕ 旁向倾角ω 像片旋角κ
P T
基准面E 投影面P 透视轴TT 投影中心S 主光轴SO 像主点o 地面主点O 像底点n 地底点N 航高H
l l l l l l l l
像片倾角a 等角点c 地面等角点C 主垂面W 主纵线vv 基本方向线VV 循点J 合面、合线、主合 点I l 主横线 l 等比线
理解主合点和像底点的意义
航摄像片上特殊的点、线、面
摄影测量基本知识
一、航空摄影基本知识
1、摄影比例尺(像片比例尺)
n 摄影比例尺的定义 S f a P
l
1 m
=
l L
=
f H
H
n 航摄像片上处处不相等
Ø 像片非水平拍摄 Ø 地面地形起伏
L
a3 a1 b3 ⋅ a2 c3 a3
摄影测量基本知识
五、中心投影构像方程(共线方程)
n 旋转矩阵R中方向余弦的关系
Ø 同一行(列)的各元素自乘之和为1; Ø 任意两行(列)对应元素互乘之和为0; Ø 行列式为1
S f
y
x0
O y0
x
摄影测量基本知识
四、航摄像片的内外方位元素
w S φ Zs o v u y κ x
三个线元素
X S、 YS、 Z S
ω
ϕ、ω、κ
Z Y D D Ys Xs X
三个角元素
摄影测量基本知识
四、航摄像片的内外方位元素
1)以Y轴为主轴的ϕ、 ω 、 κ Z Y S y Zs Z Y Ys N A Xs ϕ κ x ω ox X o X 航向倾角ϕ 旁向倾角ω 像片旋角κ
P T
基准面E 投影面P 透视轴TT 投影中心S 主光轴SO 像主点o 地面主点O 像底点n 地底点N 航高H
l l l l l l l l
像片倾角a 等角点c 地面等角点C 主垂面W 主纵线vv 基本方向线VV 循点J 合面、合线、主合 点I l 主横线 l 等比线
理解主合点和像底点的意义
航摄像片上特殊的点、线、面
摄影测量基本知识
一、航空摄影基本知识
1、摄影比例尺(像片比例尺)
n 摄影比例尺的定义 S f a P
l
1 m
=
l L
=
f H
H
n 航摄像片上处处不相等
Ø 像片非水平拍摄 Ø 地面地形起伏
L
摄影测量学 第三章 立体像对空间前方交会

Z1
Y2
Y1
X2
s1
Z1
X1
X1
Ztp
Ytp Xs1 M
Zs1 Y1
(XA, YA, ZA) Ys1 Xtp
摄影基线
s2
B
BZ= Zs2 –Zs1 BY= Ys2 –Ys1
s1
BX= Xs2 –Xs1
同名光线投影
S1 A X A X S1 YA YS1 Z A Z S1 N S1a1 X1 Y1 Z1
YA YS1 NY1 YS2 N ' Y2 Z A Z S1 NZ1 Z S2 N ' Z 2
BX X S2 X S1 NX 1 N ' X 2 BY YS2 YS1 NY1 N ' Y2 BZ Z S2 Z S1 NZ1 N ' Z 2
二、立体像对前方交会的定义
z1 y1 S1 Z a1(x1,y1) x1 y2 S2 a2(x2,y2) x2 z2
Y
A(X,Y,Z)
由立体像对 中左右两像 片的内、外 方位元素和 同名像点的 影像坐标量 测值来确定 相应地面点 在物方空间 坐标系中坐 标的方法
X
Z2
三、基本公式
1、点投影系数法
(1)、(3)式 联立求解
BX Z 2 BZ X 2 N X 1Z 2 X 2 Z1 BX Z1 BZ X 1 N' X 1Z 2 X 2 Z1
BX X S2 X S1 BY YS2 YS1 BZx1 Y R y 1 1 1 Z1 f
由外方位角元素计算像空间辅助坐标 计算点投影系数 N1 , N2 计算地面坐标 XA, YA, ZA
3摄影测量基础知识

Photogrammetry,2004
Photogrammetry & Remote Sensing-----Survey & Mapping Engineering
y
P S
S
a
a0
f
f
o
c
y0
P0
A
h
x x0
像片倾斜引起像点位移
A0
地形起伏引起像点位移
• 航摄像片只要消除像片倾斜与地形起伏引起的像点位移,就 能将中心投影变换为正射投影。要使这种投影具有成图比例尺
Photogrammetry & Remote Sensing-----Survey & Mapping Engineering
(n)oa0 a S
H
A
h
B A0 ( N )O
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Survey & Mapping Engineering
• 航高:指摄影飞机在摄影瞬间相对于某一水准面 的高度,从该水准面起算向上为正。航高分为相对 航高和绝对航高。
Photogrammetry & Remote Sensing-----Survey & Mapping Engineering
相对航高是指摄影机物镜相对于某一基准面的高度,常称 为摄影航高。它是相对于被摄区域内地面平均高程基准面的 设计航高。
3、倾斜误差性质
➢等比线上的点不存在像片倾斜引起的像点位移; ➢当00 1800, a 0,则rc0 rc ,像点朝向等角点位移; ➢当 1800,a 0 ,则rc0 rc ,像点背向等角点位移; ➢当 90、270,sin 1,即在向径相等的情况下,位 于主纵线上的像点的倾斜误差最大。
第三章摄影测量基础知识

总结
摄影比例尺(像片比例尺) 摄影航高 空中摄影过程 摄影资料的要求(5方面)
影像色调 像片重叠:航向和旁向 像片倾角 航线弯曲 像片旋角
S
y f
O
p
x
3.2 中心投影的基本知识
摄影测量是通过量测像片来获得地面目标的几何 信息,这就要研究像片和地面之间的几何投影关系。
一般情况下,旁向重叠度不得少于15%,保持在30%40%之间。 航向、旁向重叠小于最低要求的称为航摄漏洞, 需要通过航测外业进行补救。
六度重叠区 三度重叠区 四度重叠区
航向重叠
旁向重叠
地面起伏较大时,还应增大重叠度。
随着航空数码相机的应用,已有航向重叠>80%、 旁向重叠>40%~60%的大重叠航空摄影测量; 利用三线阵传感器摄影,还具有100%的重叠度。
1 l m L
H
航片倾斜、地形起伏时m不为常数。 当取摄区内的平均的高程作为摄 影基准面时,摄影机的物镜中心 至该面的距离称为摄影航高。 E
A L
O
航高:相对航高和绝 对航高。
1 f m H
f为摄影机主距, H为航高
测图比例尺
摄影比例尺越大,像片地面的分辨率越高, 有利于影像的解译与提高成图精度,但摄影 比例尺过大,增加工作量及费用,所以,摄 影比例尺要根据测绘地形图的精度要求与获 取地面信息的需要来确定。
o2 o1
像片旋角过大会减少立体像对的有效范围
四、空中摄影质量的评定
(1)负片上影像是否清晰、框标影像是否齐全、像幅 四周指示器件的影像(如水准气泡)等是否清晰可辨; (2)由于太阳高度角的影响,地物阴影长度是否超过 摄影规范的规定,地物阴暗和明亮部分的细部能否辨 认清楚; (3)航摄负片上是否存在云影、划痕、乳剂层脱落 等现象; (4)负片上的黑度是否符合要求,影像反差等不得 大于规范要求; (5)航带的直线性、航带间的平行性、像片影像的 重叠度、航高差和摄影比例尺等等都要检查评定,并 不得超过规定的技术指标。
无人机技术智能测绘 第3章 摄影测量技术基础知识

摄影测量的分类
摄影测量简介
摄影测量的分类:
➢ (2)按用途分类
➢ 地形摄影测量:主要任务是测绘国家基本比例尺的
地形图和各专题图,建立地形数据库,为地理信息系 统提供三维基础数据。无人机摄影测量通常应用于地 形摄影测量。
➢ 非地形摄影测量:将摄影测量方法应用于资源 调查、变形观测、环境监测、军事侦察等领域, 主要通过从二维影像重建三维模型,提取各种 信息。
倾斜摄影测量
03
摄影测量产品
摄影测量产品
DOM(数字正射影像图):
数字正射影像图(DOM)是以航摄或遥感影像为基础,通过扫描处理和辐射改正后裁剪成的影 像数据,同时添加地形要素信息,形成以栅格数据形式存储的影像数据库,具有地形图的几何精度 和影像特征。
➢ (1)影响特征:数字正射影像图(DOM) 兼具地图几何精度和影像特征,具有高精 度、信息丰富、逼真、迅速获取等优势。 可用于地图分析、资源调查、社会经济发 展研究、防灾规划等应用,提供可靠基础 数据,支持地图修测更新和数据评价。。
• 传感器搭载在航空飞机或航空器上,摄影距 离在 1~10km, 是当前摄影测量生产各种中 小比例尺地形图的主要方法。
• 传感器搭载在无人机上,摄影高度在 100~1000m,是生产各 种大比例尺地形图 的主要方法,也常用于小区域工程测图和补 测航摄漏洞。
• 摄影距离小于 300m,主要用于特定的竖 直目标,而非地 形目标的测量。
➢ (1)建立方法
✓ 1.直接从地面测量,所涉及的仪器有水平导轨、测针和相对高 程测量板等构件,也可以用 GPS、全站仪、野外测量等高端 仪器;
3 正射影像图扫描
正射影像图扫描直接对已有的光学正射影像图进行数字化扫描, 再经过几何纠正获得数字正射影像的数据。
摄影测量 投影几何基础知识
、 、
3.6 像点空间直角坐标变换与中心投 影的构像方程
一、空间直角坐标变换
二、正交变换矩阵的特点
三、中心投影构像方程式
1、什么是 共线方程:它是通过摄影机的内、外方位元 素,描述三点共线的数学方程式:
三点?
摄影中心
S
z S
地面点
y x
A
像点
a
Z
o
Y X
270
0
sin 1
三、地形起伏在水平像片上引起的像点位移
S
f
n
H h
rn
a0
h a0 a
h Rh H h
0
rn h H
a
h
P
H
A
h
N
R
A0
h
A'
E
四、透视作图
四、透视作图
四、透视作图
四、透视作图
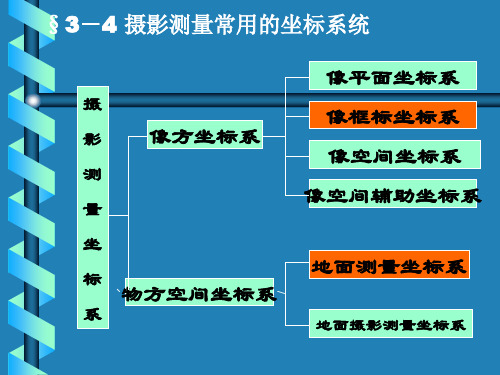
3.4 摄影测量常用的坐标系统
描述像点的平面坐 标和空间坐标;
像平面直角坐标系 像方坐标系 像空间直角坐标系 像空间辅助坐标系 地 面 测 量 坐 标 系 物方坐标系 地面摄影测量坐标系
摄影 测量 常用 坐标 系
描述地面点在物方 空间的位置;
XS、 YS 、 ZS-外方位元素
3.7 航片上的像点位移与方向偏差
0
0
rc
rc
0
0
0
a ' a 0 rc rc 0
rc
2
f 其 中 向 径 rc 与 像 片 倾 角 恒 为 正 值
摄影测量学 第三章 人眼的立体视觉和立体观测

明亮背景 a1(红) 品红 绿 A(黑)
白光照射
白
a2(绿)
光闸法
在投影的光线中安装光闸,两个光闸相互 错开
观测者带上与投影器中光闸同步的光闸眼镜
偏振光法
在两投影光路中安装两块偏 振 平面互成90°的偏振器
观测者带上一副检偏镜 镜片的偏振平面相互垂直, 左右分别与投影的左右偏振 平面相互垂直
液晶闪闭法
人眼的立体视觉与立体观测
主要内容
பைடு நூலகம்一、人眼立体视觉原理
二、人造立体视觉 三、像对的立体观察
§3.1.1 人眼立体视觉
人 眼 基 本 构 造
图3.1 人眼的结构
人眼好像一个完善的自动调光的摄影机—— 水晶体如同物镜,瞳孔如同光圈,网膜像底 片。
人 眼 立 体 视 觉
单眼观察:景物的中心构像,单张像片;
者眼睛的距离不相等。
fc f 为夸大系数,f c为观察立体时像片距人眼的 距离250mm,等于人眼的明视距离
重叠影式观察立体
互补色加法
在投影器中插入互补色滤 光片 (品红色、蓝绿色) 观测者双眼分别带上同色
镜片
互补色减法
在白纸上分别用品红、 绿互补色印刷一对像片, 观测者左右眼分别戴上 品红、绿互补色眼镜, 在明室对立体图画进行 观察。
立体镜观察
桥式立体镜
在一个桥架上安置两个相同的简单透镜
透镜光轴平行,间距约为眼基距,高度等于透镜主距
立体镜观察立体
反光立体镜
在左右光路中各加入一对反光镜扩大像片间距,可 对大像幅进行立体观察。
结果:立体模型与实物不一样,主要是在竖直方向夸 大了,地面的起伏变高,有利于高程量测。
原因:航摄像片的主距与观察时像片所在位置距观察
白光照射
白
a2(绿)
光闸法
在投影的光线中安装光闸,两个光闸相互 错开
观测者带上与投影器中光闸同步的光闸眼镜
偏振光法
在两投影光路中安装两块偏 振 平面互成90°的偏振器
观测者带上一副检偏镜 镜片的偏振平面相互垂直, 左右分别与投影的左右偏振 平面相互垂直
液晶闪闭法
人眼的立体视觉与立体观测
主要内容
பைடு நூலகம்一、人眼立体视觉原理
二、人造立体视觉 三、像对的立体观察
§3.1.1 人眼立体视觉
人 眼 基 本 构 造
图3.1 人眼的结构
人眼好像一个完善的自动调光的摄影机—— 水晶体如同物镜,瞳孔如同光圈,网膜像底 片。
人 眼 立 体 视 觉
单眼观察:景物的中心构像,单张像片;
者眼睛的距离不相等。
fc f 为夸大系数,f c为观察立体时像片距人眼的 距离250mm,等于人眼的明视距离
重叠影式观察立体
互补色加法
在投影器中插入互补色滤 光片 (品红色、蓝绿色) 观测者双眼分别带上同色
镜片
互补色减法
在白纸上分别用品红、 绿互补色印刷一对像片, 观测者左右眼分别戴上 品红、绿互补色眼镜, 在明室对立体图画进行 观察。
立体镜观察
桥式立体镜
在一个桥架上安置两个相同的简单透镜
透镜光轴平行,间距约为眼基距,高度等于透镜主距
立体镜观察立体
反光立体镜
在左右光路中各加入一对反光镜扩大像片间距,可 对大像幅进行立体观察。
结果:立体模型与实物不一样,主要是在竖直方向夸 大了,地面的起伏变高,有利于高程量测。
原因:航摄像片的主距与观察时像片所在位置距观察
相关主题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x
yw
2、外方位元素- 角元素
z S
v
x u
、、
航向倾角 旁向倾角
y
h
x
o
像片旋角
、 确定z轴的方向 确定x,y轴在自身平面内 N
的方向
O
M
、、 系统
S-uvw 绕v轴 S-u‘v‘w'
S
第一次旋转
w v
u
x
v u
、、 系统
S-u‘v‘w'
第二次旋转 S-uvw
正交矩阵
a1 R T R a2 a3
b1 b2 b3
c1 a1 c2 b1 c3 c1
a2 b2 c2
a3 1 0 0 b3 0 1 0 c3 0 0 1
不同的转角系统所表示的旋转矩阵不同,但其 值是相同的。
yw z
逆时针方向为正
v x u y
2、外方位元素- 角元素
、 、 系统
旁向倾角, 航向倾角, 像片旋角, 以u为主轴的外方位角元素
S
, φ
' o
x
h
O
E N
M
转角的正负号,国际规定绕轴逆时针旋转 为正(从旋转轴的正向的一端面对着坐标 原点看),反之为负。我国习惯规定航向 倾角顺时针方向旋转为正, 、 角逆时 针方向旋转为正。
a1 R b1 c 1
原则:
a2 b2 c2
a3 b3 c3
1)三个元素互相独立,故该三个元素不能位于 同一行、同一列。(自乘和为1,不独立) 2)尽量不在对角线上(不便于求解其它的方向 余弦)。
像点
摄 影 测 量
框标坐标系 关系? 像空间坐标系 关系? 像空辅坐标系 已知 地面摄影测量系 已知 大地坐标系
、、 系统
旋转矩阵
S-uvw 第三次旋转 S-xyz
绕 w轴
X cos Y sin Z 0
sin cos 0
0 x x 0 y R y f 1 f
f
o
y x
a ( x, y ) A
像点 摄 影 测 量
框标坐标系 关系? 像空间坐标系 关系?
像空辅坐标系 已知 地面摄影测量系 已知 大地坐标系
x0 , y0 , f
内方位元素 外方位元素 ??
地面点
z
y
2、外方位元素
在恢复了内方位元素(恢复 了摄影光束)的基础上,确定 摄影光束在摄影瞬间的空间位 置和姿态的参数,称航摄像片 的外方位元素,即摄影时像空 间坐标系在地面摄影测量系中 位置和方向的元素。
a2 b2 c2
a3 b3 c3
规律:只要知道转角绕轴旋转的先后顺序,就 能很快写出总的旋转矩阵,即为每个旋转矩阵 的连乘。 每个旋转矩阵中,绕某轴旋转时,与该轴相对 应的三维矩阵中对应位置的元素为1,与其它轴 的方向余b1 c1 a2 b2 c2 a3 a1 b3 a2 c3 a3 b1 b2 b3 c1 1 0 0 c2 0 1 0 c3 0 0 1
w' w'' S v' u'
绕 u'轴
o
y’
u'
x
、、 系统
S-uvw
第三次旋转 S-xyz
y z z w S v x u''
绕 w轴
y
v
x
u'' o
、、 系统
yw z v x u y
、、
S-xyz 像空间 坐标系 v-u-w S-uvw 像空间辅 助坐标系
z
y x
y
S
a 在框标坐标系中的坐标为(x,y) a 在像空间坐标系中的坐标为(x,y,
f
o x0
o y
0
f)
x x x0 y y y 0
x
z
1、内方位元素
x0 , y0 , f
S
y x
每条摄影光线在像空间坐 标系中有一个确定的方向。
作用: 1、像点的框标坐标系向像空间坐标系的 改化; 2、确定摄影光束的形状;
、、 系统
旋转矩阵
u x x v R R R y R y w f f
cos 0 sin R RRR 0 1 0 sin 0 cos 0 0 cos sin 0 a1 1 0 cos sin sin cos 0 b 1 0 sin cos 0 0 1 c1
2、外方位元素
外方位线元素
确定像空间坐标系的原点S在 地面空间坐标系中的坐标;
Z
z S
y
x y
a o
x
X S、YS、Z S
D
Y
A
X
2、外方位元素
外方位角元素
确定像空间坐标系三轴在地面空间坐标 系中的方向。
w
v z S y x u
1) 2)
、、
系统 系统
y
o
、 、
3) A、、V 系统
S
x
h
x o
以v为主轴的外方位角元素
O
N
M
在解析摄影测量中,为了利用像点坐标计 算相应的地面点坐标,首先要建立像点在不同 的空间坐标系之间的坐标变换关系,我们主要 介绍像点在像空间坐标系与像空间辅助坐标系 之间的坐标变换,也称为像点空间直角坐标的 旋转变换。 由高等数学知道,空间直角坐标变换是正 交变换,一个坐标系按照某种顺序依次的旋转 三个角度即可变换为另一个同原点的坐标系。
x0 , y0 , f
内方位元素
外方位元素
线元素: X S、YS、Z S 角元素:
地面点
x、、
y、、
内方位元素3个,外方位元素6个。
、、 v
、、 系统
旋转矩阵
S-u‘v‘w' 第二次旋转 S-uvw
绕 u'轴
0 X 1 Y 0 cos Z 0 sin
X X sin Y R Y Z cos Z 0
S y
x
a o
x
Z
G
X
A
G
O
Y
G
2、外方位元素 确定像空间坐标系在地面空间坐标系中位置 和方向所需要的元素,通常选用地面摄影测量坐标 系。 •线元素 •角元素
外方位线元素:确定像空间坐标系的原点S在地面空间坐标 系中的坐标,即摄影瞬间S在该坐标系中的坐标值; 外方位角元素:确定像空间坐标系三轴在地面空间坐标系 中的方向。
cos A sin A 0 R RA R Rv sin A cos A 0 0 0 1 0 0 cosv sin v 0 a1 1 0 cos sin sin v cosv 0 b 1 0 sin cos 0 0 1 c1
2、外方位元素- 角元素
A、、 a 系统
方位角A 像片倾角 像片旋角 a S-uvw 像空间辅 助坐标系
yw z S
v
x u
z
y
a
o
x
A、、 a
w-u-w
S-xyz
Y
像空间 坐标系 以w为主轴的外方位角元素
A
N X
O
3)以w轴为主轴的Av系统的坐标变换
X x x Y R A R Rv y R y Z f f
、、 系统
旋转矩阵
S-uvw
第一次旋转 S-u‘v‘w'
绕v轴
u cos v 0 w sin
0 sin X X 1 0 Y R Y Z 0 cos Z
• 内外方位元素
z
y x y
a o
像点 摄 影 测 量
框标坐标系 关系? 像空间坐标系 关系?
像空辅坐标系 已知 地面摄影测量系 已知 大地坐标系
S
x
Z
ZT
G
YT
X
A
G
地面点
O
OT
XT
Y
G
框标坐标系 关系? 像空间坐标系 关系?
像空间辅助坐标系
内方位元素 外方位元素
1、内方位元素
框标坐标系
内方位元素 像空间坐标系
z
x0 , y0 , f
y
x
S
f 确定投影中心与像片之间相关位置的参数; f 摄影中心S到像片的垂距(主距) f y 像主点o在框标坐标系中的坐标 x0 , y0 o 注意 • 内方位元素一般是已知的 o x0 y 0 • x0,y0都为小值
x
1、内方位元素 框标坐标系、像平面坐标系、 像空间坐标系之间的关系
a2 b2 c2
a3 b3 c3
a1 = cosφcosκ - sinφsinωsinκ a2 = -cosφsinκ – sinφsinωcosκ a3 = -sinφcosω b1= cosωsinκ b2 = cosωcosκ b3 = -sinω c1 = sinφcosκ+ cosφsinωsinκ c2 = -sinφsinκ + cosφsinωcosκ c3 = cosφcosω