基于帧间差分算法的运动目标检测方法研究
帧间差分法运动目标检测过程及原理

帧间差分法运动目标检测过程及原理帧间差分法是一种常用的视频运动目标检测技术,它通过比较视频序列中相邻帧之间的差异来检测目标的运动。
该方法常用于视频监控、智能交通系统、视频分析等领域。
本文将介绍帧间差分法的运动目标检测过程及原理,以及其在实际应用中的优势和局限性。
一、帧间差分法的原理帧间差分法的原理基于一个简单的假设:如果某个像素点在相邻两帧之间的亮度发生了变化,那么这个像素点所对应的物体就有可能发生了运动。
根据这个假设,可以通过计算相邻两帧之间的像素点亮度差异来确定目标的运动。
在实际应用中,帧间差分法通常使用以下公式来计算相邻两帧的像素点差异:D(x,y,t) = |I(x,y,t) - I(x,y,t-1)|D(x,y,t)表示在时间t时刻的像素点(x,y)的差分值,I(x,y,t)表示在时间t时刻的像素点(x,y)的亮度值,t-1表示时间t之前的时刻。
通过计算相邻两帧之间的像素点差异,可以得到一副差分图像,该图像中像素点的数值表示了该点在帧间差分中的差异程度。
接着,可以对差分图像进行阈值处理,将高于阈值的像素点标记为目标像素点,从而实现目标的运动检测。
帧间差分法的运动目标检测过程包括以下几个步骤:1. 视频帧获取和预处理首先需要从视频流中获取连续的视频帧,并对每一帧进行预处理,包括灰度化、降噪、边缘检测等操作,以便后续运动目标检测的准确性和鲁棒性。
2. 帧间差分计算对相邻两帧的视频进行帧间差分计算,得到差分图像。
可以使用绝对差值、差分平均值等方式来计算差分图像。
3. 阈值处理对差分图像进行阈值处理,将高于阈值的像素点标记为目标像素点。
阈值的选择是帧间差分法中需要仔细考虑的一个关键问题,合适的阈值能够更好地区分目标和背景,提高检测准确度。
4. 目标区域提取通过连通域分析、形态学处理等方法,将标记为目标像素点的区域进行进一步的提取和分割,得到目标的位置信息。
5. 目标跟踪和输出对提取得到的目标区域进行目标跟踪和输出,可以采用卡尔曼滤波、光流算法等方法来对目标进行跟踪,最终实现目标的运动检测和输出。
帧间差分法运动目标检测过程及原理

帧间差分法运动目标检测过程及原理
帧间差分法是一种常用的运动目标检测方法,其基本原理是通过对连续帧图像的像素
进行差分运算,找到像素值有较大变化的像素点,从而判断出图像中的运动目标。
1.图像采集:需要连续采集到少于或者等于2帧的图像,这些图像通常是通过视频摄
像机或者其他类似设备获得的。
2.减法运算:将第一帧图像的像素值依次与第二帧图像的像素值相减,得到一个差分
图像。
差分图像中的每个像素值表示了该像素点在两个图像中的变化情况。
根据差分结果,可以得到该像素发生变化的时间、位置和幅度等信息。
3.二值化处理:对差分图像进行二值化处理,将差分图像中的像素值映射为0或者255,得到一个二值化的图像。
二值化后的图像中,像素值为255的部分表示图像中存在运动目标,而像素值为0的部分则表示图像中没有运动目标。
4.目标区域提取:根据二值化后的图像,可以通过对连续的相邻像素点进行连通区域
分析,获得运动目标的位置和大小等信息。
通过设定一定的阈值来确定目标的像素数量或
者面积大小,可以筛选掉一些由于噪声等原因引起的误检测。
5.目标跟踪:在连续的帧图像中进行目标检测后,可以通过对目标的位置信息进行跟踪,进一步判断目标的运动轨迹和速度等特征。
帧间差分法也存在一些局限性。
该方法对于光照变化敏感,当光照发生较大变化时,
会导致图像中的许多像素值发生变化,从而增加了误检测的可能性。
当背景中存在较大的
纹理变化或者噪声时,也容易引起误检测。
在实际应用中,帧间差分法通常与其他方法相
结合使用,以提高运动目标检测的准确性和鲁棒性。
帧间差分法运动目标检测过程及原理

帧间差分法运动目标检测过程及原理帧间差分法是一种常用的运动目标检测方法,依靠帧与帧之间的差异来实现对运动目标的检测。
其原理是通过计算相邻帧之间的差异,将运动目标从静态背景中分离出来,从而实现目标检测。
1. 获取视频流或者图像序列,并将其转换为灰度图像。
该过程可以使用OpenCV等图像处理库实现。
2. 按照时间顺序,每隔一定的时间间隔(例如,每秒钟、每隔几帧)取一帧图像,形成连续的图像序列(也可以直接读取视频流)。
如果采用的是视频流,还需将视频流的时间基准与实际时间对齐。
3. 对于每一帧图像,先将其与上一帧图像做差,得到当前帧的差分图像。
若没有前一帧图像,则将当前帧图像作为背景参考。
4. 对于差分图像,可以应用阈值分割算法(例如Otsu算法、自适应阈值法等)来将其二值化。
此时,目标物体所在的像素值区域将为前景,而背景则为另一种像素值。
5. 对于二值化后的图像,可以应用形态学处理(例如开操作、闭操作等)来去除噪声点和孔洞,从而更准确地提取目标轮廓。
6. 最后,可以利用cv2.findContours()函数查找目标的轮廓。
这些轮廓可以代表单个运动目标或者多个运动目标。
且可以通过测量轮廓的面积、宽度、高度、位置等属性,进一步对目标进行分类与识别。
总结起来,帧间差分法是一种基于视频或图像序列的运动目标检测方法,它的优点是实现简单、速度较快,且对于CMOS或CCD摄像头等图像采集设备不稳定、背景不纯,亮度不均等问题具有较好的适应性。
不足之处在于对于复杂的场景或目标缩放、旋转、部分遮挡等情况,其检测效果容易受到影响。
因此,在实际应用中,我们需根据具体情况选择不同的算法方法来实现更准确、可靠的目标检测。
帧间差分法运动目标检测过程及原理
帧间差分法运动目标检测过程及原理帧间差分法是一种常用的运动目标检测方法,它通过比较相邻帧之间的差异来判断是否存在运动目标。
其基本原理是利用目标在连续帧之间的运动导致像素值的变化,通过对像素值差异的分析来判断是否存在目标。
1. 选择连续的帧:首先选择需要进行运动目标检测的视频序列,并选择连续的几帧作为输入。
通常情况下,选择相邻的两帧或者多帧进行比较。
2. 图像预处理:对选取的帧进行预处理,包括图像增强、降噪等操作。
常用的预处理方法包括平滑滤波、中值滤波等。
3. 帧间差分计算:对连续帧之间的像素进行差分计算,得到差分图像。
差分图像可以通过计算相邻像素的差异来获得,常用的差分计算方法包括绝对差分、平方差分等。
4. 二值化处理:将差分图像进行二值化处理,将差异像素标记为目标像素,无差异像素标记为背景像素。
常用的二值化方法包括阈值法、自适应阈值法等。
5. 目标提取:从二值化的差分图像中提取出目标区域。
可以通过连通区域分析、形态学操作等方法来实现目标提取。
6. 目标跟踪:将提取出的目标区域与原始图像进行叠加,实现目标的跟踪。
可以通过目标的位置、大小等信息来实现目标的跟踪。
帧间差分法的原理是基于连续帧之间的差异来判断是否存在目标。
当目标发生运动时,连续帧之间的像素值会发生变化,差分图像中会出现明显的差异区域。
通过对差分图像进行二值化和目标提取操作,可以得到目标的位置和形状信息。
进一步结合目标跟踪算法,可以对目标进行跟踪和分析。
帧间差分法具有简单、快速、实时性好等优点,适用于对静态相机下的运动目标进行检测。
由于光照变化、背景噪声等因素的干扰,帧间差分法也存在一定的局限性。
在实际应用中通常需要结合其他方法来进行运动目标检测。
帧间差分法运动目标检测过程及原理

帧间差分法运动目标检测过程及原理
帧间差分法是一种常用的视频图像处理技术,用于运动目标检测和跟踪。
其原理是对连续帧之间的像素值差异进行计算和分析,从而确定哪些像素发生了变化,即表示目标运动。
帧间差分法主要包括以下几个步骤:
1. 预处理:将连续帧进行灰度处理,将彩色图像转化为灰度图像,减少计算量。
2. 帧差计算:计算相邻两帧之间的差异,并对差值进行二值化处理。
这里可以使用简单的相减法,即将后一帧减去前一帧对应像素的灰度值。
3. 二值化处理:将帧差图像进行二值化处理,将差异值大于阈值的像素设置为前景(表示目标运动),小于阈值的像素设置为背景。
4. 运动目标提取:对二值化后的图像进行图像处理方法的应用,如连通区域分析、形态学运算等,提取出连续的前景区域,即运动目标。
5. 运动目标跟踪:对提取到的运动目标进行跟踪,可以使用相关滤波器、卡尔曼滤波器等跟踪算法。
帧间差分法的原理是基于目标运动引起的图像像素值变化。
当物体在连续帧之间发生移动时,其在图像上的位置会发生变化,导致像素值的差异。
利用这一差异性,可以通过计算帧差图像来检测目标运动。
帧间差分法的优点是计算简单,实时性较好,适合用于实时视频监控等应用场景。
但同时也存在一些缺点,比如对光照变化和背景干扰比较敏感,对目标与背景颜色相似的情况可能存在误判。
为了提高运动目标检测的准确性和稳定性,可以结合其他方法进行优化,比如背景建模、光流法等。
还可以采用自适应阈值、多帧差分等方法来改进帧间差分法的性能。
基于帧间差分的自适应运动目标检测方法
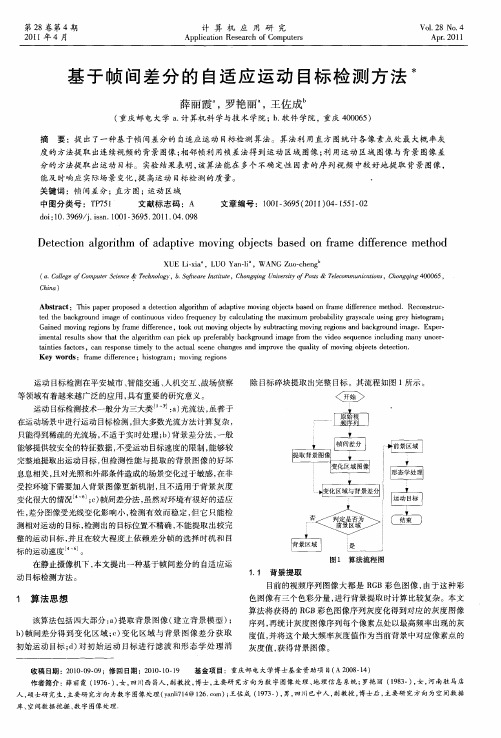
( . ol efC m u rSi c & Tcnl ) . ow r l tu a C lg o pt c ne e o e e e o g S tae n i  ̄,C ogigU i rt f P s 出 Tl o u i t n , h nqn 0 0 5 h o ,b f t s hn q nv syo ot n ei s e cmm nc i s C og i e ao g4 0 6 ,
d i 1 3 6 /iis . 0 1 3 9 . 0 1 0 0 8 o :0. 9 9 .sn 1 0 — 6 5 2 1 . 4. 9
D tci loi m o d piemoigojcsb sdo a edf rn em to eet nagrh f at vn bet ae nf m ieec eh d o t a v r f
G ie o i g n y a ed frn e t ko t oig bet b br t g o ig ei s n a k o n ae x e a dm v g e i s m iee c , o vn jc ys t c n v g n db c g u d m g .E pr n nr o bf l f o um o s u ai m n r o a r i —
能 及 时 响 应 实 际 场 景 变 化 , 高运 动 目标 检 测 的质 量 。 提 .
关键词 :帧 间差分 ;直方 图 7
文献标 志码 :A
文章编 号 :10 — 6 5 2 1 )4 15 — 2 0 13 9 ( 0 1 0 —5 10
第2 8卷 第 4期 21 0 1年 4 月
帧间差分法运动目标检测过程及原理

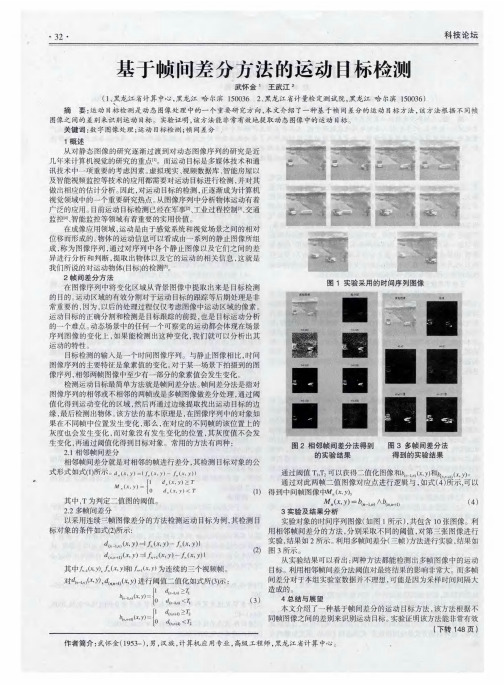
帧间差分法运动目标检测过程及原理帧间差分法是一种常用的运动目标检测方法,它通过比较视频序列中不同帧之间的差异来检测运动目标,从而实现目标跟踪和识别。
本文将介绍帧间差分法的运动目标检测过程及原理。
帧间差分法的运动目标检测过程主要包括以下几个步骤:1. 视频帧获取:首先需要获取视频序列,可以通过摄像头、摄像机等设备来获取。
2. 帧间差分处理:将视频序列中相邻的两帧进行差分处理,得到两帧之间的差异,以检测目标的运动情况。
差分处理可以使用像素级的差异或者区域级的差异进行计算。
3. 运动目标检测:通过帧间差分处理得到的差异图像,可以进行阈值处理、边缘检测、连通域分析等操作,以提取出视频序列中的运动目标。
4. 目标跟踪与识别:最后可以对提取出的运动目标进行跟踪和识别,以实现对目标的监控与分析。
二、帧间差分法的原理帧间差分法的原理是基于视频序列中连续帧之间的差异来进行运动目标检测的。
具体来说,帧间差分法的原理包括以下几个方面:1. 差分图像计算:帧间差分法首先通过比较视频序列中相邻帧的像素值,计算出两帧之间的差异。
常见的计算方式包括绝对差分、均方差分等,可以得到表示两帧之间差异的差分图像。
1. 视频监控:帧间差分法可以用于视频监控系统中对目标的运动进行检测与跟踪,从而实现对监控区域的实时监控与预警。
2. 交通监控:在交通监控系统中,帧间差分法可以用于车辆与行人的运动检测与识别,以实现交通流量统计、违规行为检测等功能。
3. 智能驾驶:在智能驾驶系统中,帧间差分法可以用于实时检测路面上的车辆、行人等运动目标,以实现自动驾驶、避障等功能。
4. 人体姿态识别:帧间差分法可以用于对人体姿态的运动进行检测与分析,从而实现人体姿态识别、动作分析等功能。
优点:2. 对光照变化不敏感:帧间差分法在运动目标检测过程中对光照变化不敏感,能够适应不同光照条件下的目标检测需求。
3. 算法简单:帧间差分法的算法相对简单,计算量小,适用于资源有限的嵌入式系统。
帧间差分法运动目标检测过程及原理

帧间差分法运动目标检测过程及原理帧间差分法是一种广泛应用于视频图像处理中的运动目标检测方法。
在该方法中,通过同一场景下不同帧间像素值的变化来判断是否有物体运动的情况发生。
本文将具体介绍帧间差分法运动目标检测的过程和原理。
一、图像预处理帧间差分法首先需要将视频帧进行预处理,包括去除噪声和灰度化两个步骤。
1.去噪处理。
由于采集设备和信号传输等原因,视频帧中可能会出现一些毛刺、线条等噪声。
将这些噪声去除后,可以更好地提取物体的运动信息。
去噪的方法包括高斯滤波、中值滤波等,其中高斯滤波是一种广泛应用的方法。
2.灰度化。
将视频帧转化为灰度图像,可以简化像素值的处理过程,降低计算机资源的消耗。
灰度化的方法包括平均值法、最大值法、加权平均法等。
二、运动物体检测经过预处理后,图像中会出现明暗程度发生变化的区域,这些区域即为可能存在运动物体的区域。
帧间差分法通过计算两帧图像之间的差值来检测这些运动物体。
1.差值计算。
将预处理后的两帧图像进行逐像素比较,计算出两帧图像中每个像素的灰度值差。
如果该像素灰度值差超过了设定的阈值,则判断该像素处存在运动物体。
2.二值化处理。
将差值图像进行二值化处理,将灰度值超过设定阈值的像素点设为1,其他像素点设为0。
经过二值化处理后,得到了一个二值图像,其中的白色像素标记了可能存在运动物体的位置。
3.运动物体判定。
通过对二值图像进行连通区域分析,将那些像素点数量超过一定阈值的连通区域判定为运动物体。
通过此方法,可以将可能存在的多个运动目标分离,并得到它们的位置、大小等信息。
三、总结帧间差分法是一种简单而有效的运动目标检测方法,具有实时性和可适应性等优势。
但也存在一些缺点,比如对于光照变化、背景复杂等情况的适应度较差。
因此,在实际应用中需要根据具体情况选择合适的方法,并进行必要的优化和改进。
帧间差分法运动目标检测过程及原理

帧间差分法运动目标检测过程及原理帧间差分法是一种常用的视频运动目标检测方法,它广泛应用于视频监控、智能交通、智能车辆等领域。
本文将从帧间差分法的原理和检测过程两个方面进行介绍。
一、帧间差分法的原理帧间差分法是一种基于像素级的运动目标检测方法,它利用相邻视频帧之间的像素差异来提取运动目标。
其原理是通过比较相邻两帧图像的像素值之差,来检测图像中的运动目标。
如果相邻两帧图像中某一像素点的像素值之差超过了一个设定的阈值,那么就认为该像素点处于运动状态。
通过对每个像素点进行类似的处理,就可以提取出视频中的运动目标。
帧间差分法的原理比较简单,但是在实际应用中需要考虑的因素较多,例如光照变化、背景干扰、噪声等问题都会对帧间差分法的检测效果产生影响。
帧间差分法通常需要结合其他方法来解决这些问题,以提高检测的准确性和稳定性。
帧间差分法的检测过程通常可以分为以下几个步骤:1. 视频获取:首先需要获取视频数据,可以通过摄像头、视频文件等方式获取到需要进行运动目标检测的视频数据。
2. 视频预处理:在进行帧间差分之前,通常需要对视频数据进行一定的预处理工作,主要包括去噪、增强、背景建模等操作,以减少噪声干扰、提高图像质量,从而提高运动目标检测的准确性。
3. 帧间差分计算:对于每一帧图像,首先需要与上一帧进行差分计算,得到相邻两帧图像之间的像素值差异。
4. 阈值处理:接下来需要对差分图像进行阈值处理,将像素值差异超过设定阈值的像素点认定为运动目标。
通过调整阈值大小可以控制运动检测的敏感度。
5. 运动目标提取:最后将通过阈值处理得到的二值图像进行连通区域分析,提取出视频中的运动目标区域。
需要注意的是,帧间差分法进行运动目标检测时还需要考虑运动目标的轨迹跟踪、运动目标的特征提取等问题,这些问题通常需要结合其他方法来解决。
视频运动目标检测方法研究与分析

视频运动目标检测方法研究与分析视频运动目标检测是计算机视觉领域的一个重要研究方向,它广泛应用于智能视频监控、交通流量统计、自动驾驶、医学图像分析等领域。
目标检测任务的难度主要在于在不同场景下,不同光照条件下,物体会呈现出不同的外观变化,同时还存在图像噪声、遮挡、部分遮挡等问题,这些因素都会对目标检测结果造成干扰。
一、传统视频目标检测方法1. 基于帧间差分法帧间差分法是电子监控领域最早使用的目标检测算法之一,其基本思路是将相邻两帧图像进行相减得到差值图,然后根据设定的阈值进行像素分类。
若差分结果大于阈值,则判断该像素点为运动像素点;反之,若差分结果小于阈值,则认为该像素点是背景像素点。
帧间差分法简单易行,速度较快,但由于只考虑了像素值的变化,无法区分运动目标和噪声或背景像素,且当目标的运动速度较慢、光照条件发生变化时,容易产生误检测。
2. 基于背景建模法背景建模法是一种通过学习并建模背景图像来实现目标检测的算法。
该方法常用的技术有Mixture of Gaussian(高斯混合模型)、Self-Organizing Background Subtraction (自组织背景减法)等。
Mixture of Gaussian方法建立了一个高斯混合模型来对背景进行建模,通过计算像素值与模型高斯分布之间的距离来判断像素点是否属于背景。
该方法在处理室外环境下的背景建模效果优异,但在室内环境下易受到光照变化和阻挡干扰,容易产生误检测。
二、深度学习相关方法在深度学习技术的快速发展下,深度神经网络被广泛应用于目标检测任务中。
1. R-CNN方法系列R-CNN方法系列是一种基于卷积神经网络的目标检测算法。
其主要思路是将输入图像划分为多个候选框,然后通过卷积神经网络对每个候选框进行特征提取。
最后,通过SVM分类器和回归器来计算候选框的置信度和坐标信息,以确定目标类别和位置。
R-CNN方法系列在目标定位和分类任务上取得了不错的效果,但缺点是算法速度较慢,不适用于实时应用场景。
帧间差分法运动目标检测过程及原理
帧间差分法运动目标检测过程及原理帧间差分法是一种运动目标检测方法,基于视频帧间像素差异性和连续性的特点。
帧间差分法可以通过对比相邻帧像素的差异值来检测运动目标。
这种方法通常被用于视频监控、安防和视频分析领域。
帧间差分法的工作原理是基于两个假设,第一是背景在相邻帧之间变化很小,第二是运动物体在相邻帧之间变化明显。
基于这两个假设,我们可以使用帧间像素差分来检测运动目标。
帧间差分法的基本思路是将当前帧和之前的帧进行像素比较,以确定每个像素点之间的差值。
如果像素值之间的差异超过一定的阈值,就将该像素点标记为前景物体,否则将其视为背景。
例如,如果我们将当前帧和前一个帧进行比较,如果像素的差异在阈值范围内,那么像素被视为不变。
如果像素的差异超过阈值,那么像素就会被视为运动目标。
因此,我们可以将这些运动目标像素标记为前景物体,形成一个二值图像。
可以通过对前景像素进行计数、分析、过滤和跟踪来检测运动物体。
帧间差分法的实现可以通过以下步骤来完成:1. 读取视频帧序列首先,需要从视频中获得连续的帧序列。
可以使用OpenCV的VideoCapture库读取视频文件或从实时视频流中获取帧。
2. 前后帧差分使用前面序列的帧与当前帧的像素值做差,即用当前帧减去前一帧。
此时,差异较大的部分就是前景物体。
3. 阈值处理对于运动目标和背景的差异会受到噪声和照明变化等多种因素影响,因此需要进行阈值处理,以区分背景和前景像素。
阈值处理可以根据帧间像素差异的特点和实际情况进行调整。
4. 前景目标检测将阈值处理后的二值图像形成前景掩模,标记出运动目标的位置。
5. 目标跟踪通过对前景内像素的计数、分析和过滤等方法,对运动目标的大小、形状、位置等信息进行跟踪。
帧间差分法的优点在于简单易懂,适用于实时视频处理。
但是,该方法依赖于阈值处理的参数和初始帧的选择,因此在复杂场景下会存在误检和漏检的情况。
针对这些问题,可以通过结合其他技术,如背景建模、光流法等来提高检测精度和鲁棒性。
帧间差分法运动目标检测过程及原理

帧间差分法运动目标检测过程及原理帧间差分法运动目标检测,是一种常用的视频目标检测方法。
它通过比较视频序列中相邻帧之间的差异,来识别出视频中的运动目标。
这种方法具有简单、快速、实时性强的特点,因此在视频监控、智能交通、安防监控等领域得到了广泛的应用。
下面将介绍帧间差分法运动目标检测的原理和实现过程。
一、原理帧间差分法的原理是通过比较视频序列中相邻帧的像素值差异来识别出视频中的运动目标。
一般来说,视频中的运动目标在相邻帧之间会引起像素值的变化,而静止的背景则保持相对稳定的像素值。
我们可以通过计算相邻帧之间的像素值差异来找出视频中的运动目标。
具体来说,对于视频序列中的每一帧图片,我们可以将其表示为一个像素矩阵。
假设当前帧为I(x, y, t),而前一帧为I(x, y, t-1),那么我们可以通过以下公式计算出两帧之间的像素差异:D(x, y, t) = |I(x, y, t) - I(x, y, t-1)|D(x, y, t)表示像素点(x, y)在时间t上的差分值。
通过计算所有像素点的差分值,我们就可以得到一张差分图像。
在这张差分图像中,像素值较大的地方表示有较大的像素差异,而像素值较小的地方则表示像素差异较小。
通过阈值处理和连通域分析,我们就可以找出视频中的运动目标。
二、实现过程帧间差分法运动目标检测的实现过程可以分为以下几个步骤:1. 读取视频我们需要从视频文件中读取视频序列,并将每一帧的图片进行提取,以便后续的处理。
2. 计算帧间差分对于视频序列中的每一帧图片,我们需要计算其与前一帧之间的差分图像。
这可以通过上文提到的差分公式来实现。
3. 阈值处理得到差分图像之后,我们可以对其进行阈值处理。
通过设定一个合适的阈值,将差分图像中较大的像素差异点标记为前景点,而将较小的像素差异点标记为背景点。
4. 连通域分析通过连通域分析,我们可以将前景点连接成一个个连通区域,从而得到视频中的运动目标。
5. 目标跟踪我们还可以对检测出的运动目标进行跟踪,以便进行后续的分析和处理。
帧间差分与背景差分相融合的运动目标检测算法_朱明旱

自动化测试计算机测量与控制.2005.13(3) C omputer Measurement &Control#215#收稿日期:2004-06-10; 修回日期:2004-07-12。
作者简介:朱明旱(1975-),男,湖南省张家界人,硕士生,主要从事模式识别、图像处理等方向的研究。
罗大庸(1944-),男,湖南省长沙市人,教授,博导,主要从事信息融合技术、计算机视觉与模式识别等方向的研究。
文章编号:1671-4598(2005)03-0215-03 中图分类号:TP393文献标识码:B帧间差分与背景差分相融合的运动目标检测算法朱明旱,罗大庸,曹倩霞(中南大学信息科学与工程学院,湖南长沙 410075)摘要:针对视频序列中运动目标检测进行了研究,提出了一种将帧间差分和背景差分相互融合的运动目标检测算法,首先选取一帧作为背景帧,确立每一个象素点的高斯模型;然后对相邻两帧进行差分处理,区分出变化的区域和没有发生变化的区域,没有发生变化的区域更新到背景帧中,发生变化的区域与背景模型进行拟合,区分出显露区和运动目标,将显露区以很大的更新率收入到背景帧中。
该方法允许在有运动物存在的情况下进行建模,实验表明该方法准确率高,运算速度快,能满足实时检测的需要。
关键词:视频图像序列;高斯模型;运动目标检测;阴影检测Moving Objects Detection Algorithm Based on Two Consecutive Frames Subtraction and Background SubtractionZhu Minghan,Luo Dayo ng ,Cao Q ianxia(Sch ool of Information S cien ce an d En gineering,Cen tral South Un iversity,Changs ha 410075,Chin a)Abstract:Aimed at the complexity of the current algorithm,an algorithm bas ed on tw o con secutive frames sub traction and b ack -groun d su btraction is presented.At firs t,select a frame as a background.T hen su btract tw o con secutive frames to find out moving area an d background area.Update backgr ou nd w ith the backgroun d ar ea w hich is detected.At last ,com pare moving area w ith b ack -groun d to locate moving objection and un covering area.Update backg rou nd w ith un covering area.Th e back grou nd model in th is algo -rithm is obtained even if there ar e some moving objection s.T he results s how that this algorithm combines the advantages of veracity and of runtim e,and fit for real time d etection.Key words :video-frequ ency image sequen ce;Gau ssian m odel;moving ob ject detection;shadow detection0 引言从视频序列中检测出运动物体是计算机视觉、视频图像跟踪等应用领域的重要研究内容,目前已成为热点研究问题[1]。
帧间差分法运动目标检测过程及原理
帧间差分法运动目标检测过程及原理帧间差分法是一种基于视频图像的运动目标检测的方法,其原理是通过比较相邻帧之间的像素差异来检测出移动的目标。
具体来说,该方法将视频帧按照时间顺序排列,对相邻两帧进行像素差分操作,即将当前帧的像素值减去上一帧的像素值,得到差分图像。
然后,利用阈值二值化处理差分图像,得到二值化图像。
最后,对二值化图像进行连通区域分析或运动目标跟踪,即可得到视频中的运动目标。
帧间差分法的优势在于其实现简单,适用于高速移动的目标以及背景复杂的场景。
但是,由于此方法仅考虑相邻帧之间的差异,可能会受到噪声等因素的干扰而产生误检。
帧间差分法的主要步骤如下:1. 读取视频帧序列。
将视频帧序列从磁盘或存储设备中读取到内存中。
2. 帧间差分处理。
将相邻两帧进行像素差分操作,得到差分图像。
3. 阈值处理。
对差分图像进行阈值二值化处理,得到二值化图像。
4. 对二值化图像进行连通区域分析,得到目标区域。
5. 运动目标跟踪。
对目标区域进行运动目标跟踪并更新目标位置。
帧间差分法的原理是基于运动物体在连续帧中像素值的变化。
例如,在一张静止的背景中,运动目标的像素值会有明显的变化。
因此,通过比较相邻帧之间的像素值的差异大小,可以检测到运动目标的存在。
帧间差分法的实现基于以下公式:D(x,y,t)=|I(x,y,t)-I(x,y,t-1)|其中,D(x,y,t)表示第t帧与第t-1帧的像素差分图像;I(x,y,t)表示第t帧的灰度值。
当像素值的差异超过设定的阈值时,就将差异分为前景像素;否则,差异可认为是噪声或背景变化,将其分为背景像素。
经过阈值处理和二值化处理得到的二值化图像即为前景像素。
总之,帧间差分法是一种简单且有效的运动目标检测方法,但其存在着一定的局限性和误差。
需要根据实际应用场景和要求选择合适的方法。
基于帧间差分方法的运动目标检测
『J , 学, 国辉, 34 科  ̄ 李 涂丹. 控视频运动 目标检 测减 背景技 术的研 究 监
精神文 明建设增添了一道风景线。
( 上接 3 页 ) 2 地提取动态 图像中的运动 目 。 标 帧间差分法算法 现状和展望[. J 中国图像 图形学报,0 6l,:1— 2 . ] 2 0 ,1 9 9 9 7 7 简单 , 检测运 动 , 4 1 戚 江卓 军. 实时视频监控 系统 中运动 目 标检 测和 足一是不能检测出静止的 目标 。 二是对进行差分的连续帧和阈值的 跟踪的一种 实用方法[. J浙江大学学报, 0 , ,213 — 8 0 ] 2 23 1:87 14 . 0 6 选 取要求较高 , 而且依赖于运动物体 的运动速度 , 如果对该算 法进 【] 5冈萨雷斯著, 阮秋 琦译. 字 图像处理【 】 数 M. 北京 : -x & 出版社 , 电- - ? -
行改进将是下一步的一个 目标 。 20 , 0 6第二版. 参 考 文献 【 刘 学军. 图像序 列中运动 目标跟踪 算法研 究【] 1 J 视频 D. 南京: 东南大 学, 0 . 2 7 0 【 彭嘉雄 , 文琳 . 外 背景抑 制与 小 目标分 割检 测 『. 2 】 周 红 J 电子 学报 ]
一
兢兢业 业 , 为人梯 ; 甘 他们不 断改进服 务方 式 , 提供精神 产品信息 , 全心全 意为人民服务 , 为高校的人才培养服务 , 为精神文 明建设 服 务 。俗话说 :学高为师 , “ 德高为范” 。高校档案工作者 , 以高 尚的情 操、 优秀的道德品质 、 无私 的奉献精 神 、 明的举止 、 良的风范 , 文 优 为
・4 ・ 1 8
管理 科学
帧间差分法运动目标检测过程及原理
帧间差分法运动目标检测过程及原理帧间差分法(Frame Difference Method)是一种常用的视频运动目标检测方法,它通过比较视频帧之间的变化来检测目标的运动。
这种方法广泛应用于视频监控、交通管理、智能交通等领域,并且在实际应用中取得了不错的效果。
1.视频帧获取:需要获取视频输入,并将视频分解成一帧一帧的图像。
2.帧间差分计算:对于连续的两帧图像,通过对两帧图像进行减法操作,计算出图像像素点之间的差值。
这个差值可以表示出两帧图像之间的变化情况,有助于检测出图像中的运动目标。
3.差分图像处理:得到帧间差分图像后,需要对其进行一定的处理,以便进一步提取出图像中的运动目标。
常见的处理方法包括阈值处理、形态学操作等。
4.目标提取与分析:将处理后的帧间差分图像进行目标提取,得到目标的边界信息。
可以进一步对目标进行形状、大小、速度等特征分析。
5.目标跟踪与识别:通过目标提取和特征分析,可以对目标进行跟踪和识别,得到目标的运动轨迹和行为信息。
帧间差分法的原理:帧间差分法主要包括以下几个关键步骤:1.差分计算:通过对两帧图像进行像素级的差分计算,得到一个差分图像。
通常采用的方法是直接相减或者采用其他像素级的差分运算方法。
2.阈值处理:得到的差分图像中可能存在一些噪声或者细微的变化,需要通过设置一个合适的阈值来将目标的变化和噪声区分开来。
3.形态学操作:通过形态学操作,可以进一步处理差分图像,去除一些不必要的细节,加强目标的轮廓信息。
4.目标提取:根据处理后的差分图像,可以得到目标的二值图像,进而提取出目标的轮廓信息。
帧间差分法的优点包括不需要训练数据、对目标的尺度不敏感、对光照变化不敏感等。
帧间差分法在应对复杂场景、目标遮挡、背景复杂等情况下仍然存在一定的局限性,需要结合其他方法进行改进和完善。
实践5视频运动目标检测帧差法的实现

实践5视频运动目标检测帧差法的实现视觉目标检测是计算机视觉领域的重要研究方向之一,它的目标是从图像或视频中准确地检测出感兴趣的目标物体。
视频运动目标检测是其中的一个子问题,主要解决的是在一个视频序列中检测和跟踪出运动的目标物体。
本文将介绍一种常用的视频运动目标检测方法,帧差法。
帧差法是一种基于帧间差异的目标检测方法,它的基本原理是通过对相邻帧之间的像素差异进行分析,来判断物体是否在其中一帧中发生了运动。
具体实现的步骤如下:1.读取视频帧:首先,需要读取视频文件,并将每一帧转换为灰度图像。
利用图像处理库,可以很方便地完成这一步骤。
2.帧差计算:接下来,将当前帧与上一帧进行像素级别的差分运算,得到差分图像。
可以使用简单的减法操作来计算两个图像之间的像素差异。
3.二值化处理:为了进一步简化差分图像的处理,可以将其转换为二值图像。
可以使用阈值分割的方法,将像素差异超过一些阈值的像素点设置为白色,其他像素点设置为黑色。
4.目标提取:根据二值图像中的连通区域,可以将目标物体从背景中提取出来。
可以通过连通区域标记、轮廓提取等方法来实现。
5.目标跟踪:在相邻帧之间进行目标跟踪,可以通过目标匹配、运动预测等方法来实现目标的连续跟踪。
帧差法基于像素差异的思想,非常简单易懂。
然而,它也存在一些局限性。
首先,只能检测到发生明显运动的目标,对于静止或者微弱运动的目标不敏感。
其次,对于复杂的场景,包括光照变化、背景干扰等,也容易产生误检测或漏检测。
针对这些限制,可以采用一些改进的技术来提升帧差法的性能。
例如,可以在差分图像中应用高斯滤波来减少噪声影响,或者在目标提取阶段应用形态学滤波来去除无关的小区域。
同时,还可以采用背景更新的方法,动态地调整背景模型,以适应场景的变化。
总之,帧差法是一种简单且有效的视频运动目标检测方法。
通过对相邻帧之间的像素差异进行分析,可以检测和跟踪出视频中的运动目标。
虽然存在一定的局限性,但可以借助一些改进的技术来提升检测的性能。
帧间差分法运动目标检测过程及原理

帧间差分法运动目标检测过程及原理1. 引言1.1 背景介绍帧间差分法是一种常用的视频分析技术,通过比较连续帧之间的差异来检测视频中的运动目标。
随着视频监控系统的普及和应用领域的不断拓展,运动目标检测技术变得越来越重要。
传统的运动目标检测方法往往存在一些局限性,如受到光照和阴影等环境因素的影响,导致检测精度不高。
帧间差分法可以有效克服这些问题,其基本原理是通过比较相邻两帧图像的差异来确定图像中的运动目标。
当两帧图像之间的差异超过一定阈值时,就可以判定出存在运动目标。
这种方法简单有效,能够准确地捕捉到视频中的动态目标,具有较高的检测精度和实时性。
在现实应用中,帧间差分法被广泛应用于视频监控、智能交通等领域。
通过结合其他技术,如背景建模和运动轨迹分析,可以更进一步提高运动目标检测的准确性和稳定性。
帧间差分法的发展不仅有助于提升视频监控系统的智能化水平,还为其他相关领域的研究和应用提供了重要参考。
1.2 研究意义1. 提高视频监控效率:现如今,视频监控已经成为重要的安全防范手段,而帧间差分法可以有效地提高监控系统的效率,实现对运动目标的自动检测和跟踪。
2. 减少人力成本:传统的人工检测方法需要大量的人力投入,而帧间差分法可以实现自动化的运动目标检测,从而节约人力成本。
3. 提高检测精度:帧间差分法可以对视频序列中的像素进行差分运算,准确地检测出目标的运动轨迹,提高了检测的精度。
4. 加强安防监控:运用帧间差分法可以及时发现异常行为和可疑目标,加强安防监控,保障社会治安。
研究帧间差分法在运动目标检测中的应用具有重要的意义,不仅可以提高监控效率和精度,还可以减少人力成本,加强安防监控,是当前研究中的热点和难点之一。
2. 正文2.1 帧间差分法基本原理帧间差分法是一种常用于视频处理中的运动目标检测技术。
其基本原理是通过比较相邻帧之间的像素差异来判断是否存在运动目标。
具体来说,帧间差分法首先对输入的视频序列进行帧间差分处理,得到差分图像。
基于帧间差分算法的运动目标检测研究毕业设计论文

毕业设计(论文)题目名称:基于帧间差分算法的运动目标检测研究毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
帧间差分法运动目标检测过程及原理

帧间差分法运动目标检测过程及原理帧间差分法是一种常用的视频运动目标检测方法,其原理是通过比较连续两帧图像之间的差异来判断图像中的运动目标。
以下是帧间差分法的运动目标检测过程及原理的详细介绍:1. 获取连续帧图像:首先需要获取前后两帧的视频图像,这两帧图像应该是时间上连续的。
2. 图像灰度化:将获取到的图像进行灰度化处理,将彩色图像转化为灰度图像,此步骤的目的是简化图像处理的计算量。
3. 计算图像差异:比较前后两帧图像的差异,可以使用以下公式计算每个像素的差异:差异 = abs(I1(x, y) - I2(x, y))I1表示前一帧的图像,I2表示后一帧的图像,(x, y)表示像素的坐标。
4. 提取运动目标:根据计算得到的图像差异,可以设置一个阈值(比如差异大于某个阈值的像素点认为是运动目标),将差异大于阈值的像素点提取出来,形成运动目标区域。
5. 运动目标跟踪:对于提取出的运动目标区域,可以根据需要进行进一步的处理,例如检测运动目标的位置、大小、运动轨迹等。
6. 更新帧图像:将当前的图像帧作为前一帧,继续进行后续帧间差分,实现连续的目标检测和跟踪。
帧间差分法的原理是基于连续图像帧之间的变化,当有运动目标出现时,前后两帧图像中相应位置的像素值会发生明显的变化。
通过比较像素点的差异,可以较好地检测出这些运动目标。
这种方法的优势在于简单、实时性较高,适合于动态目标较为明显的场景。
帧间差分法容易受到光照变化、摄像机抖动等因素的影响,可能会导致误检测或漏检测的情况出现。
为了提高准确性,可以结合其他的图像处理方法,例如背景建模等,以进一步优化运动目标检测的效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
灰度图像是一种特殊的彩色图像,其中R,G,B三基色的色彩分量全部相等。图像中的每个像素的数值则是由1个字节,即8位数据显示的。彩色图像经过灰度处理形成灰度图像,这一过渡调节过程即为灰度化处理。由于彩色图像中具有大量的像素值,且这些数值之中都包含有R,G,B三个基色分量,而每个分量的取值有255种,基于此每个像素点则含有255*255*255种取值范围[2]。而灰度图像是一种特殊的彩色图像,因为这种图像R,G,B三个分量相等这一属性。因此在目标检测过程中,为降低图像运算的复杂度,减少信息处理量,普遍地的做法是需要先将大量格式不一的图像统一转化为灰度图像,使得图像的计算量大大缩减,这样操作之后,虽然灰度图像与彩色图像色彩不同,但两者都可以就图像的特征信息精准反映。图像灰度化处理可用四种方法来实现:
一、绪论
视觉是人类感受周围复杂环境变化最直接有效的手段之一。随着计算机和电子技术的普及,诸如视频和图像的各种数字视觉数据急剧增加。面对日益增多的视觉数据,光靠人眼是辨别不过来的。这时我们就需要用计算机视觉的方式来自动识别。由此同时我们就需要在此基础上提出相应的目标检测技术,这种目标检测就是在物体运动的同时同步检测运动目标,这是实时检材中检测手段,可以将其目标检测信息提取出来。
几十年来专家学者坚持不懈刻苦钻研,目标检测方面收获了丰硕的成果,截止目前,关于该研究较为权威的期刊杂志包括 PAML ,IVC;召开的相关会议有ECCV;也有在这方面颇有建树的个人研究比如说;Gibson提出的光流法,以后的学者在他的基础上实施并且进一步完善了该方法;Jain等人踩在前人研究的基石,提出了帧差法,并且实施了具体论证实验,对此方法加以强化佐证;高凯良针对于运动车辆的锁定研究了相应的检测方法;吴君钦主张适用的移动目标检测算法涉及邻近五帧差值算法与背景结合消除算法,上述算法能较好适用于静态背景下的目标检测。以上介绍了很多种有关目标检测技术的算法,然而没有任何一种算法适用于所有情况下的运动目标检测。因此,运动目标检测的关键在于:如何根据现有的相关理论知识,结合具体场景的特点,寻找合适的方法,从而满足实际应用的需求。
1.腐蚀
A为原始图像,B为结构元素,A被B腐蚀的过程如图。阴影部分包含在A的范围之内且比A小,看起来A像是被剥掉了一层[3]。Matlab中可以使用自带imerode函数对图像腐蚀,用法如下:
bw1=imread(‘…’);
se=strel(‘line’,10,90);
二、目标检测理论基础
(一)目标检测概述
目标检测需要的一般操作是:(1)检测当前图像中是否具备待测目标。(2)关于待测目标的具体位置应该明确。一个好的目标检测算法的需要解决实时性和可靠性两个基本问题。目标检测方法大概可以分为两大类,即对已知运动目标的检测和对未知运动目标的检测。对已知运动目标来说主要应用于对检材样本的分析方面,对未知运动目标来说主要运用于视频监控方面的检测等。行业中最为普遍使用的方法包括相邻帧差法,背景消除法,mean-shift法[1]。
方法一:固定阈值
设置阈值T并逐个扫描图像的像素值,像素值为0则将意味着数值小于T,像素值设置为255则意味着其数值大于或等于T。阈值T是一种动态区域选择,不同图像阈值的选择需要定量分析;
方法二:像素平均值
计算图像像素的平均值K,将K设置为阈值对图像分割;
方法三:灰度直方图
首先绘制图像灰度直方图,然后统计像素值找到图像的两个最高峰,最后确定两个峰值之间的最低峰谷值作为阈值。
(1)最大值法:
(2)平均值法:
(3)加权平均法:
Matlab中可以使用自带rgb2gray函数对目标边缘检测,用法如下:
I=rgb2gray(img);
其中img为RGB图像;I为灰度化后的图像。
(三)二值化
二值图像,按名字来理解只有两个值,0和1, 0表示背景,而1表示前景。图像二值化的原理是:先设置适当的阈值将灰度图像划定为目标跟背景两部分。阈值的划定标准则要求要在最大限度的保存数据信息的同时,将背景和噪声干扰限制到最小范围。图像灰度级的变化并不会影响整体图像的特征信息。因此,在目标检测中,为便于存储以及提高运算速度,我们常常将灰度图像转化为二值图像。图像二值化可用三种方法来实现:
(2)通过不同大小的结构元素来进行开启运算,得到的效果也会不同;
(3)Matlab中使用imopen函数对图像进行开启操作。
4. 闭合
闭合就是对图像先进行膨胀操作然后再对图像进行腐蚀操作[5],它有以下特点:
(1)闭合运算可以用来封闭小裂缝;
(2)通过不同大小的结构元素来进行闭合运算,得到的滤波效果也会不同;
Matlab中对图像进行二值化处理操作借助 im2bw函数,用法如下:
BW=im2bw(I,level);
其中I为灰度图像;BW为二值图像;参数level是一个介于0-1之间的参数,也就是图像分割的阈值,默认情况下,它的取值为0.5。
(四)形态学处理
噪声作为一种影响因素,会导致被实施二值化操作后的图像出现许多异常突出的小区域和小缝隙,形态学观点的引入恰好克服了这一麻烦。它借助腐蚀、膨胀、开启、闭合等基本运算手段,实现了开运算提取运动目标,腐蚀运算消除异常突出的区域,膨胀运算充斥填实缝隙。
bw1=imread(‘…’);
se=strel(‘line’,10,90);
bw2=imdilate(bw,se);
其中bw1为二值图像;se为生成的结构元素;bw2为膨胀后的图像。
3. 开启
开启就是对图像先进行腐蚀操作然后再对图像进行膨胀操作[4],它有以下特点:
(1)开启运算可以用来消除孤立的小点;
bw2=imerode(bw,se);
其中bw1为二值图像;se为生成的结构元素;bw2为腐蚀后的图像。
2. 膨胀
A为原始图像,B为结构元素,A被B膨胀的过程如图1所示:
A被B膨胀的结果为图中阴影部分。阴影部分包括A的所有范围且比A大,看起来A像是膨胀了一圈。Matlab中可以使用自带imdilate函数对图像腐蚀,用法如下: