基于组态王、EXCEL和MATLAB的PID自整定仿真软件
基于MATLAB模糊自整定PID控制器的设计与仿真

nq知 l表, 和榄糊避辑的 则推理 为珊 l 沱壤础.采用讣雄
与 。均成取大螳 ,同时 为避免 系统 在矬定 值附近 m脱掀
机拄 制技 术构 j戊的一种 具钉 厦馈通 道的闭环数 ≯控制系统 雠糊控制脲理 土坚包括 雎Ip的模糊 鲢化处理 、摸糊 摊 制脱 lllJ、模蝴决策 、0:模糊化处理 等环竹组成的馁糊控 捌 ;}= l}
仪需要 f研的经骑羽I技巧.m儿十分龆时 删I埘.靠实际 控制系统控 制过 III.Ill r噪声 .饥栽扰动平fI 他 · 环 境条件变化的蟛 响,受控址 襁参数.模型结构均将发生变
脚 I 榄蝴 PID控 制吊龇 · 拘罔
化 这 种恃税 下.1采用 常规 PID捕制器雕以获樽满意舳 控制效 .『flj模糊杜制 依赖被拄卅 象精确的数学 模 . 是在总童l Ji拇作 始jI禽玷础 l 炎现 自动控制的一种手段。本文 应 用模糊推删l的方法实现时 PID参数的在线 自动档定 ,弹 依 此 殳计lf1 -般挎{l}lj系统 的模糊参数 一憔定 PID控制器 齄千。MATLAB的仿真结 槊丧f蝣,与常舰 PID控制 系统相 比,改泄仆能 挟得 世优 的舟榨性 和动、静态性及县有 良好 旧m &m I:
表 2 K.模 糊 规 则 表
NB NM NS O PS PM PB
NB NB N B NM NM O O
NB NB NM NM NS O O
NM NM NS NS O PS PS
NM NS NS O Ps NM PM
1, O,K,t=1。
在 调 试 中 ,可 以 知 道 :模 糊 控 制 器 输 入 变 量 的 量 化 因 子 、 对 控 制 系统 的动 态 性 能 影 响较 大 , 选 得 较 大 , 系统 的 超 调 较 大 ,过 渡 时 间较 长 。 选 得 较 大 ,超 调 减 小 ,并且 越 大系统超调越小 ,但系统 的响应速度 会变 慢 。实 际 ,量 化 因 子 和 二 者 之 间 也 相互 影 响 。
基于Matlab与组态王的智能控制实验平台设计

基于Matlab与组态王的智能控制实验平台设计盖文东;张宁;张婧;高宏岩【摘要】该文针对现在智能控制教学中缺乏实践环节的问题,设计了基于Matlab 与组态王的智能控制实验平台.该实验平台利用Matlab完成智能控制闭环仿真,并通过OPC技术与组态王进行实时数据通信,实现了对实验过程的动态监控.以基于模糊自适应的直流电动机转速-电流双闭环运动控制为例说明了该实验平台的设计过程,并将该控制算法与经典PID控制算法进行仿真比较以验证其有效性.应用效果表明,该实验平台能够直观、形象地展示实验结果,满足智能控制实验教学的要求,并且便于学生根据自己的需求进行二次开发.【期刊名称】《实验科学与技术》【年(卷),期】2017(015)004【总页数】4页(P156-159)【关键词】智能控制;模糊自适应;组态王;OPC;运动控制系统【作者】盖文东;张宁;张婧;高宏岩【作者单位】山东科技大学电气与自动化工程学院,山东青岛266590;山东科技大学电气与自动化工程学院,山东青岛266590;山东科技大学电气与自动化工程学院,山东青岛266590;山东科技大学电气与自动化工程学院,山东青岛266590【正文语种】中文【中图分类】TP273.4智能控制是近年来发展起来的一门前沿交叉学科,是自动化及相关专业方向的一门专业选修课[1]。
但因在教学过程中缺乏能够锻炼学生实践能力的实验设备,学生只注重了理论知识的学习,没有达到较好的教学效果。
为此,本文以直流双闭环运动控制实验为例,建立基于Matlab与组态王的智能控制实验平台,用于学生的实验教学。
转速、电流双闭环控制直流调速是运动控制教学中一种典型的实验[2-4],目前学校运动控制实验设备主要采用天煌教仪DJDK-1型,该实验设备价格昂贵而且该设备采用传统PI串级控制算法,实验中最大的困难是PI参数的整定,本文设计的实验平台可实现转速PI参数[5-9]的自整定。
并利用OPC技术实现Matlab与组态王的数据通信,在组态王中设计监控界面,利用组态王较好的人机互动界面实现对控制系统实时监控[10]。
基于MATLAB的模糊自整定PID参数控制器的设计与仿真

2模糊自整定PID参数控制策略与 整定原则
杨咏梅:硕士研究生
国家自然科学基金资助项目(G0501080160302001) 电话:010-62132436.62192616(T/F)
4模糊自整定PID参数控制系统仿真
0
0.5
I.0
1 5 20
25
30
(2)输出KP、KI、KD的隶属函数曲线
图2隶属函数曲线图
(3)模糊控制规则表
根据上述的PID参数整定原则及专家经验,可以
列出输出变量KP、KI、KD的控制规则如表1-3所
示。 3.2模糊控制器的编辑
在SIMULINK环境对图1所示的模糊自整定PID 参数控制系统编辑,得到如图3所示的系统仿真框 图。在系统仿真时,我们选择被控对象的传递函数为: G(s)=l/(2Sz+3s+1)。然后按SIMUL]NK仿真的正确步骤 选择计算步长、模拟示波器X/Y轴参数等进行仿真运 算。
b模糊控制器的控制规则对模糊自整定PID参数 控制系统中的参数影响较大。这将直接影响系统的调 节效果.应对模糊控制器的FIS规则语句的权值和控 制规则表作适当的修改和调整。
图4 PID控制系统响应曲线 图5模糊自整定PID参数控制系统响应曲线
c.采用Fuzzy和PID复合控制的算法,系统的响 应速度加快、调节精度提高、稳态性能变好,而且没有 超调和振荡.具有较强的鲁棒性。这是单纯的PID控 制难以实现的,它的一个显著特点就是在同样精度要 求下,系统的过渡时间变短,这在实际的过程控制中 将有重大的意义。
基于MATLAB的PID控制器参数整定及仿真
基于MATLAB的PID控制器参数整定及仿真摘要: PID控制器结构和算法简单应用广泛,但参数整定方法复杂,通常用凑试法来确定。
文中探讨利用MATLAB实现PID参数整定及仿真的方法,并分析、比较比例控制、比例积分控制和比例微分控制,探讨了Kp, Ti, Td 3个参数对PID 控制规律的影响。
关镇词: MATLAB ; PID控制器;参数整定;仿真Parameter tuning and emulation of PID controller based on MATLAB Ahstratct; The control structure and algorithm of PID is easy and widely applicable,but its setting meth-ods of parameter are multifarious. Generally utilize guessing and trying to fix. This artical is convenient to tune PID parameters and emulate through MATLAB experiment. Analyze and compare the proportion control, the proportion integral control and the proportion differential control. Discuss the influence of three parameters KP ,Ti and Td to the PID control rules.Key words ; MATLAB;PID controller; parameter tuning; emulation引言PID控制器又称为PID调节器,是按偏差的比例P( Proportional )、积分I(Integxal)、微分D ( Differential orDerivative)进行控制的调节器的简称,它主要针对控制对象来进行参数调节。
智能控制基于组态王和MATLAB的模糊PID控制的应用

1.1 内容摘要:为了充分利用组态王良好的可视化界面功能与MATLAB强大的数值分析和控制系统仿真功能的各自优势来实现更好的工业控制,本文利用了一种编写MATLAB的S函数来实现组态王与MATLAB的动态数据交换(DDE)的方法,运用组态软件生成复杂友好的交互式人机界面(HMI),MATLAB的模糊控制工具箱完成模糊PID控制算法的运算,这样充分发挥二者优势,使得用户能够方便快捷地开发出复杂算法的控制系统,并将Mailab所附带的工具箱Fuzzy助gicTooIBox和Simulink有机地结合起来进行系统仿真,结果证明该方法具有良好的控制效果,效率高,通用性强,更换仿真模型中的控制算法模块就可实现各种复杂的工业控制过程,这大大增强了组态王的实时监控功能。
1.2 内容简介:近年来,随着计算机技术及应用的飞速发展,各个领域对自动控制系统控制精度、响应速度、系统稳定性与适应能力的要求越来越高,所研究的系统也日益复杂多变。
然而在工业生产和其他领域中,由于被控对象常具有非线性、不确定性及参数时变等复杂因素,难以建立被控对象的简单精确的模型,因而给控制系统的设计带来了极大的困难。
模糊控制在一定程度上模仿了人的控制,它不需要有准确的控制对象模型,这种控制方法既可用于简单的控制对象也可用于复杂的对象。
因此,模糊控制系统在工业控制中获得了广泛的应用。
组态软件作为一个开放型的通用工业监控系统,支持工控行业中大部分国内常见的测量控制设备,并遵循工控行业的标准采用开放接口提供第三方软件的连接(DnE/oPe/Ae皿vEE等)〔4],用户无须熟悉复杂的通信协议源代码、无须编写大量的图形生成、数据统计处理程序代码就可以方便快捷地进行画面开发、简单的程序编写、函数调用、设备连接。
但其缺点是计算能力不强,难以实现复杂的控制算法。
而MATLAB(Matri、Laboratory)应用软件拥有丰富的多学科工具箱、强大的工程计算和图像图形处理功能。
基于Matlab的模糊自整定PID控制器仿真研究
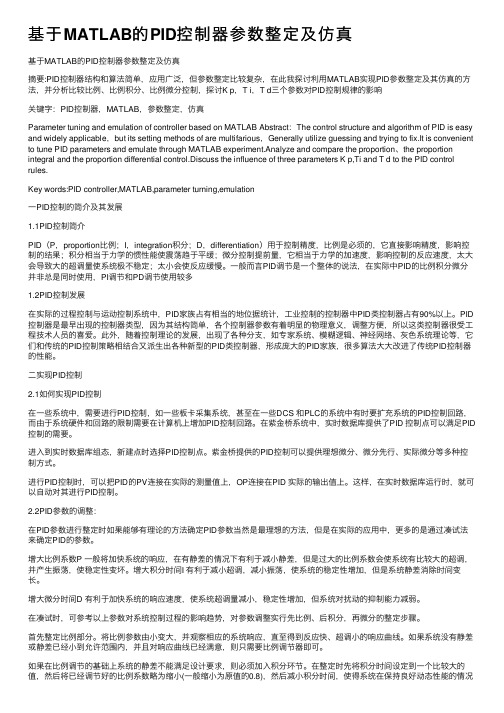
在 PID 控制器参数模糊自整定系统中,把偏差 ef 和偏差变化率 ef 作为输入,通过模糊推理的方法,可 以实现 PID 参数 ef 和 ef 不同时刻自整定需求。便构 PID 控制器参数自整定,参数模糊自整定如图 1 所示。
Figure 1. Fuzzy self-tuning PID controller structure 图 1. 模糊自整定 PID 控制器结构
对于两输入( ef 和 ef )和控制器三输出( kp , ki , kd )都采用如下模糊集: {负大,负中,负小,零,正小,正中,正大},用英文字头缩写为{NB, NM, NS, ZO, PS, PM, PB},其
中 ef 和 ef 的论域为[−3, −2, −1, 0, 1, 2, 3], kp , ki , kd 的论域为[−6, −4, −2, 0, 2, 4, 6],隶属函数曲线见图 2。
袁静雨 等
NB
NB
NM
NS
NS
ZO
ZO
NB
NM
NS
NS
ZO
PS
PS
NM
NM
NS
ZO
PS
PM
PM
PS
NS
ZO
PS
PS
PM
PB
ZO
ZO
PS
PS
PM
PB
PB
ZO
ZO
PS
基于Matlab参数自整定PID控制器的设计与仿真

《自动化技术与应用》2009年第28卷第1期Techniques of Automation & Applications | 31工业控制与应用Industry Control and Applications基于Matlab 参数自整定PID 控制器的设计与仿真王勃群1,蔺小林2,汪 宁1(1.陕西科技大学,电气与信息工程学院,陕西 西安 710021;2.陕西科技大学理学院,陕西 西安 710021)摘 要:本文针对常规PID控制器不能在线进行参数自整定的问题,结合模糊控制技术,提出了一种模糊自整定PID参数的方法,并利用Matlab的模糊控制工具箱以及Simulink对其进行了仿真,结果表明设计的自整定PID模糊控制器具有控制精度高,超调小,动态性能好的特性。
关键词:模糊控制器;Matlab;温度控制;参数自整定中图分类号:TP273.2 文献标识码:A 文章编号:1003-7241(2009)01-0031-04Matlab-Based Auto-Tuning PIDWANG Bo-qun 1, LIN Xiao-lin 2, WANG Ning 1(1. Electrical & Information Engineer College of Shaaxi University of Science &Technology Xi’an 710021 China;2. Faculty science college of Shaaxi University of Science &Technology Xi’an 710021 China)Abstract: This paper presents a fuzzy auto-tuning method for the PID controller. Simulation with the fuzzy control toolbox of theMATLAB is also presented.Keywords: fuzzy controller; matlab; temperature control; parameters auto-tuning收稿日期:2008-07-181 引言在控制系统里,如果难以获得被控制对象的数学模型,或者被控对象是个比较复杂的非线性、时变而且又有大的滞后的系统,一般的PID控制难以达到预期的效果,而模糊控制技术在复杂、大滞后、难以建立精确数学模型的非线性控制过程中表现出了优越的性能。
控制系统pid参数整定方法的matlab仿真

控制系统PID参数整定方法的MATLAB仿真1. 引言PID控制器是一种常见的控制算法,广泛应用于自动控制系统中。
其通过调节三个参数:比例增益(Proportional gain)、积分时间常数(Integral time constant)和微分时间常数(Derivative time constant),实现对被控对象的稳态误差、响应速度和稳定性等性能指标的调节。
PID参数的合理选择对控制系统的性能至关重要。
本文将介绍PID控制器的经典整定方法,并通过MATLAB软件进行仿真,验证整定方法的有效性。
2. PID控制器的整定方法2.1 手动整定法手动整定法是根据经验和试错法来选择PID参数的方法。
具体步骤如下:1.将积分时间常数和微分时间常数设为零,仅保留比例增益,将比例增益逐渐增大直至系统产生较大的超调现象。
2.根据超调响应的情况,调整比例增益,以使系统的超调量接近所需的范围。
3.逐步增加微分时间常数,观察系统的响应速度和稳定性。
4.增加积分时间常数,以减小系统的稳态误差。
手动整定法的优点是简单易行,但需要经验和反复试验,对控制系统要求较高。
2.2 Ziegler-Nichols整定法Ziegler-Nichols整定法是一种基于试探和试错法的自整定方法,该方法通过调整系统的输入信号,观察系统的输出响应,从而确定PID参数。
具体步骤如下:1.将I和D参数设为零,仅保留P参数。
2.逐步增大P参数,直到系统的输出出现大幅度的振荡。
3.记录下此时的P参数值,记为Ku。
4.根据振荡的周期Tp,计算出系统的临界增益Kc = 0.6 * Ku。
5.根据系统的类型选择相应的整定法则:–P型系统:Kp = 0.5 * Kc,Ti = ∞,Td = 0–PI型系统:Kp = 0.45 * Kc,Ti = Tp / 1.2,Td = 0–PID型系统:Kp = 0.6 * Kc,Ti = Tp / 2,Td = Tp / 82.3 Cohen-Coon整定法Cohen-Coon整定法是基于频域曲线拟合的方法,主要应用于一阶和二阶系统的整定。
matlab自整定pid算法

Matlab自整定PID算法一、介绍PID算法PID控制算法是一种经典的反馈控制算法,PID分别代表比例(proportional)、积分(integral)和微分(derivative)。
它是一种线性控制算法,最早应用于工业控制领域,后来被广泛应用于自动化、机器人、航空航天等领域。
PID算法的基本原理是通过对系统的误差进行比例、积分和微分处理,来调节系统的控制量,使系统的输出值逐步趋近目标值。
二、Matlab中的PID控制Matlab作为一种功能强大的科学计算软件,提供了丰富的控制算法工具箱。
在Matlab中,可以通过内置的PID控制器对象来实现PID算法。
可以使用MATLAB提供的PID类对象,也可以自行实现PID算法的代码。
三、Matlab自整定PID算法对于控制系统中的PID参数(Kp、Ki、Kd),通常需要通过试错法来调节,这样既费时又费力。
Matlab提供了自整定PID控制器工具箱,可以根据系统的性能指标自动生成PID参数。
与传统的手动调节相比,自整定PID算法具有以下优势:1. 时间效率:自整定PID算法可以快速生成合适的PID参数,节省了调试时间,提高了工作效率。
2. 精度:自整定PID算法可以根据系统的性能指标精确地生成最优的PID参数,使系统的控制性能得到优化。
3. 应用广泛:自整定PID算法适用于不同类型的系统,包括传统的工业控制系统、机器人系统、航空航天系统等。
四、Matlab自整定PID算法的原理Matlab自整定PID算法的原理主要是基于系统的数学模型和系统的性能指标。
在实际应用中,通常需要对系统进行数学建模,提取系统的参数,并根据系统的性能要求来自动生成PID参数。
MATLAB的自整定PID算法主要包括以下步骤:1. 系统建模:将控制系统的数学模型转化为MATLAB的控制系统模型,提取系统的参数,如传递函数、状态空间模型等。
2. 设定性能指标:根据控制系统的性能要求,设定性能指标,如超调量、调节时间、稳定性等。
基于组态软件和Matlab的PID控制器设计及参数自整定方法研究

基于组态软件和Matlab的PID控制器设计及参数自整定方
法研究
郭巍;曲延涛;赵英
【期刊名称】《微计算机信息》
【年(卷),期】2006(022)019
【摘要】工业控制现场使用的组态软件中,PID控制是比较实用、可靠的.本文介绍在组态软件中PID控制器的算法实现,并基于Matlab完成PID自整定算法,使参数的整定变得简单、易行,使组态软件更灵活、通用.并通过系统响应曲线图对设计的PID控制器的性能进行评估.
【总页数】4页(P54-56,186)
【作者】郭巍;曲延涛;赵英
【作者单位】100080,北京,中国科学院工程热物理研究所;266510,青岛,山东科技大学;100080,北京,中国科学院工程热物理研究所;100013,北京,煤炭科学研究总院【正文语种】中文
【中图分类】TP2
【相关文献】
1.基于MATLAB的模糊参数自整定PID控制器的仿真研究 [J], 韩宝江;张伟;康尔良
2.基于Matlab参数自整定PID控制器的设计与仿真 [J], 王勃群;蔺小林;汪宁
3.基于MATLAB的参数自整定模糊PID控制器的两种设计方法 [J], 杨璐;雷菊阳
4.基于组态软件和Matlab的PID控制器设计及参数自整定方法研究 [J], 郭巍;曲延涛;赵英
5.基于MATLAB的PID控制器参数自整定的分析 [J], 刘孙贤;张敏;钟义长;林子因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLAB的模糊自整定PID参数控制器计算机仿真
基于M A TLAB 的模糊自整定P I D 参数控制器计算机仿真罗光明,黄晓宇,朱建林 摘要:介绍了怎样有机地将M A TLAB 5.X 提供的S I M U L I N K 2.1与FU ZZY LO G I C TOOL 2BO X 有机地结合,方便有效地实现模糊自整定P I D参数控制系统的设计和计算机仿真。
关键词:自整定P I D 参数;模糊控制;计算机仿真Abstract :T h is p ap er in troduces how the o r 2gan ic com b inati on of S I M U L I N K 2.1and FU ZZY LO G I C TOOLBO X of the M A TLAB 5.m akesfuzzy self tun ing P I D p aram eters con tro l systemdesign and com p u ter si m u lati on be easily and effi 2ciency .Key words :selftun ing P I D p aram eters ;fuzzy con tro l ;com p u ter si m u lati on中图分类号:T P 273+.4文献标识码:B文章编号:1001-2257(2001)02-0023-04收稿日期:2001-01-160 引言控制系统计算机仿真是对控制系统进行科学研究的十分重要的手段。
通过计算机仿真来对比各种控制策略和方案、优化并确定相关参数、以获得最佳控制效果,是多年来控制系统设计尤其是新型控制策略与算法研究中必不可少的技术。
控制系统仿真程序编写与调试是一种十分繁重的工作,模糊自整定P I D 参数控制系统能在控制过程中对不确定的条件、参数、延迟和干扰等因素进行检测分析,采用模糊推理的方法实现P I D 参数K P 、K I 和K D 的在线自整定,不仅保持了常规P I D 控制系统原理简单、使用方便、鲁棒性较强等优点,而且具有更大的灵活性、适应性、控制精度更好,是目前较为先进的一种控制系统。
基于MATLAB的PID控制器参数整定及仿真

基于MATLAB的PID控制器参数整定及仿真PID控制器是一种经典的控制器,在工业自动化控制系统中广泛应用。
其主要功能是根据系统的误差信号,通过调整输出信号的比例、积分和微分部分来减小误差,并达到系统的稳定控制。
PID控制器参数整定是指确定合适的比例常数Kp、积分常数Ki和微分常数Kd的过程。
本文将介绍基于MATLAB的PID控制器参数整定及仿真的方法。
首先,在MATLAB中建立一个包含PID控制器的模型。
可以通过使用MATLAB的控制系统工具箱来实现这一过程。
在工具箱中,可以选择合适的建模方法,如直接设计模型、积分节点模型或传输函数模型。
通过这些工具,可以方便地建立控制系统的数学模型。
其次,进行PID控制器参数整定。
PID控制器参数整定的目标是通过调整比例常数Kp、积分常数Ki和微分常数Kd,使系统的响应特性达到最佳状态。
常用的PID参数整定方法有经验法、试误法、Ziegler-Nichols方法等。
1.经验法:根据系统的特性和经验,选择合适的PID参数。
这种方法常用于初步整定,但可能需要根据实际情况调整参数。
2.试误法:通过逐步试验和调整PID参数,使系统的输出响应逐渐接近期望值,从而达到最佳控制效果。
3. Ziegler-Nichols方法:该方法是一种经典的系统辨识方法,通过测试系统的临界稳定性,得到系统的传递函数参数,并据此计算出合适的PID参数。
最后,进行PID控制器参数整定的仿真。
在MATLAB中,可以通过使用PID模块进行仿真。
可以输入相应的输入信号和初始参数,观察系统的输出响应,并通过调整参数,得到最佳的控制效果。
总结起来,基于MATLAB的PID控制器参数整定及仿真的过程包括:建立控制系统模型、选择PID参数整定方法、进行PID参数整定、进行仿真实验。
PID控制器参数整定的好坏直接影响控制系统的工作性能。
通过基于MATLAB的仿真实验,可以方便地调整和优化控制系统的PID参数,提高系统的响应速度、稳定性和抗干扰性能。
基于MATLAB的PID控制器参数整定及仿真
基于MATLAB的PID控制器参数整定及仿真基于MATLAB的PID控制器参数整定及仿真摘要:PID控制器结构和算法简单,应⽤⼴泛,但参数整定⽐较复杂,在此我探讨利⽤MATLAB实现PID参数整定及其仿真的⽅法,并分析⽐较⽐例、⽐例积分、⽐例微分控制,探讨K p,T i,T d三个参数对PID控制规律的影响关键字:PID控制器,MATLAB,参数整定,仿真Parameter tuning and emulation of controller based on MATLAB Abstract:The control structure and algorithm of PID is easy and widely applicable,but its setting methods of are multifarious,Generally utilize guessing and trying to fix.It is convenient to tune PID parameters and emulate through MATLAB experiment.Analyze and compare the proportion、the proportion integral and the proportion differential control.Discuss the influence of three parameters K p,Ti and T d to the PID control rules.Key words:PID controller,MATLAB,parameter turning,emulation⼀PID控制的简介及其发展1.1PID控制简介PID(P,proportion⽐例;I,integration积分;D,differentiation)⽤于控制精度,⽐例是必须的,它直接影响精度,影响控制的结果;积分相当于⼒学的惯性能使震荡趋于平缓;微分控制提前量,它相当于⼒学的加速度,影响控制的反应速度,太⼤会导致⼤的超调量使系统极不稳定;太⼩会使反应缓慢。
控制系统pid参数整定方法的matlab仿真实验报告

控制系统pid参数整定方法的matlab仿真实验报告一、引言PID控制器是广泛应用于工业控制系统中的一种常见控制算法。
PID 控制器通过对系统的误差、误差积分和误差变化率进行调节,实现对系统的稳定性和动态性能的控制。
而PID参数的整定是保证系统控制性能良好的关键。
本实验旨在利用Matlab仿真,研究控制系统PID参数整定的方法,探讨不同整定策略对系统稳定性和动态性能的影响,为工程实际应用提供理论依据。
二、控制系统模型本实验采用了以二阶惯性环节为例的控制系统模型,其传递函数为:G(s) = K / (s^2 + 2ξω_ns + ω_n^2)其中,K为系统增益,ξ为阻尼比,ω_n为自然频率。
三、PID参数整定方法实验中我们探讨了几种典型的PID参数整定方法,包括经验法、Ziegler-Nichols方法和遗传算法。
1. 经验法经验法是一种简单粗糙的PID参数整定方法,根据实际系统的性质进行经验性调试。
常见的经验法包括手动调整法和试探法。
在手动调整法中,我们通过调整PID参数的大小,观察系统的响应曲线,从而找到满足系统性能要求的参数。
这种方法需要操作者有一定的经验和直觉,且对系统有一定的了解。
试探法是通过试验和试验的结果来确定PID参数的值。
在试探过程中,我们可以逐渐逼近最佳参数,直到满足系统性能要求。
2. Ziegler-Nichols方法Ziegler-Nichols方法是一种广泛应用的PID参数整定方法。
该方法通过系统的临界增益和临界周期来确定PID参数。
首先,在开环状态下,逐渐增加系统增益,当系统开始出现振荡时,记录下此时的增益值和周期。
然后根据临界增益和临界周期的数值关系,计算出PID参数。
3. 遗传算法遗传算法是一种基于生物进化原理的优化算法,可以用于自动化调整PID参数。
该方法通过对参数的种群进行进化迭代,逐渐找到最优的PID参数。
四、实验结果与分析我们利用Matlab进行了控制系统的PID参数整定仿真实验,并得到了不同整定方法下的系统响应曲线。
【硕士论文】基于组态王和MATLAB的多变量非线性系统在线控制的研究

武汉理工大学硕士学位论文基于组态王和MATLAB的多变量非线性系统在线控制的研究姓名:***申请学位级别:硕士专业:轮机工程指导教师:***20051001(6)流量传感器、转换器流量传感器用来对电动调节阀的流量和干扰回路的干扰流量进行检测。
采用电磁流量传感器和电磁流量转换器,4~20mA标准信号输出。
(7)牛顿模块这是用于计算机控制和通讯的模块,采用台湾威达数据采集模块。
共有两个7017模块,一个7024模块和一个7520模块。
7017是模拟量转换数字量(A/D).模块,8通道模拟输入。
模拟输入:mV、mA;输入范围:+/一150mV,+/一500mV,+/一1V,+/一5V,+/一lOV,+/一20mA。
6路差动/2路单端或8路差动(跳线选择);采样频率lOHz。
7024是数字量转换模拟量(D/A)模块,4通道模拟输出。
电流输出:4~20mA,O~20mA;电压输出:+/一lOV,O~IOV,+/一5V。
精度14Bit。
7520是RS一232转485通讯模块,RS-232/RS一485双向协议转换。
速度为300—115.200BPS,一个RS一485网上可挂256个模块,3000V隔离,支持多种速率多种数据格式。
通讯距离:2.1公里/9600BPS;2.7公里/4800BPS;3.6公里/2400BPS。
图2-5变量定义图第4章双容液位滑模变结构控制系统4.1系统介绍及数学模型本系统是一个两个水箱串联的系统。
其组成图如图4-1所示。
图4一l双容液位系统组成图系统组成部分主要有:一个水泵(由变频器控制,可恒压供水);上水箱和下水箱;两个电动调节阀,分别控制上水箱和下水箱的水位(以下简称上水位和下水位);液位、流量、压力传感器以及牛顿智能模块7017、7024和7520等(这些部件的说明已在第二章2.3.1中详述)。
上水位只受上水位调节阀(以下简称上调节阀)的控制,而下水位既受下水位调节阀(以下简称下调节阀)的控制又受上水箱流出水量的影响,由于水位系统是具有非线性的,所以这是一个两输入两输出的非线性系统:两个输入分别为上调节阀和下调节阀的开度,输出分别为上水位和下水位。
控制系统pid参数整定方法的matlab仿真
控制系统pid参数整定方法的matlab仿真
控制系统PID参数整定方法的MATLAB仿真,可以分为以下几个步骤:
1. 建立模型。
在MATLAB中建立你要进行PID参数整定的模型,比如电机速度控制系统或温度控制系统。
2. 设计控制器。
根据建立的模型,设计出对应的PID控制器,并将其加入到系统中。
3. 确定初始参数。
在进行PID参数整定前,需要确定PID控制器的初始参数。
通常可以选择Ziegler-Nichols方法、Chien-Hrones-Reswick方法等经典的PID参数整定法则来确定初始参数。
4. 仿真模拟。
使用MATLAB中的仿真工具,对整定后的PID控制器进行仿真模拟,并记录下系统的响应曲线和各项性能指标。
5. 调整参数。
根据仿真结果,对PID控制器的参数进行适当的调整,以达到更理想的控制效果。
6. 再次仿真模拟。
调整完参数后,再次使用MATLAB中的仿真工具,对整定后的PID控制器进行仿真模拟,并比较其与上一次仿真的差异,以确认调整是否合理。
7. 实现控制。
最后,将优化后的PID控制器应用到实际控制系统中,进行控制。
总的来说,PID参数整定是一个相对复杂的过程,需要根据具体情况选择合适的方法和工具。
MATLAB作为一种强大的数学计算软件,可以提供丰富的工具和函数,方便进行控制系统的建模和仿
真,也可以帮助我们更好地进行PID参数整定。
基于组态王、EXCEL和MATLAB的液位控制仿真平台研究

基于组态王、EXCEL和MATLAB的液位控制仿真平台研究杨扬;朱文玉;赵法瑞【摘要】考虑到组态王软件具有强大人机界面和通讯的优点,MATLAB软件可以实现复杂控制系统建模和分析等特点.基于结合两者软件优点的目的,本文使用Simulink软件搭建双容水箱串级PID控制模型,并提出了使用其workspace工作空间与EXCEL数据库通过DDE (Dynamic Data Exchanged动态数据交换)通讯协议进行实时数据通讯,同时组态王软件完成动画监控界面和PID控制参数设置,实现了组态王、EXCEL和MATLAB 3种软件构建水箱液位控制的虚拟实验平台.实验表明,该仿真平台充分利用各个软件的优点,为复杂控制系统学习和应用搭建了一个有效的实验平台.%Taking into account the Kingview software has a powerful man-machine interface and the advantages of communication,MATLAB software can achieve complex control system modeling and analysis and so on.Based on the purpose of combining the advantages of the two software,this paper uses Simulink software to build the cascade PID control model of the double-volume water tank,and proposes a real-time data communication using DDE (Dynamic Data Exchanged),At the same time,Kingview software completes the animation monitoring interface and PID control parameter setting,and realizes the Kingview,EXCEL and MATLAB software to construct the virtual experiment platform of the tank level control.Experiments show that the simulation platform makes full use of the advantages of each software,and builds an effective experimental platform for complex control system learning and application.【期刊名称】《电子设计工程》【年(卷),期】2018(026)002【总页数】5页(P118-121,125)【关键词】组态王;MATLAB;PID串级控制;DDE通讯【作者】杨扬;朱文玉;赵法瑞【作者单位】中国石油大学胜利学院机械与控制工程学院,山东东营257061;中国石油大学胜利学院机械与控制工程学院,山东东营257061;中国石油大学胜利学院机械与控制工程学院,山东东营257061【正文语种】中文【中图分类】TN99在计算机技术飞速发展的今天,PC机作为上位机在工业过程监控平台中的应用越来越广泛。
《过程控制及其MATLAB实现》PID控制器参数自整定实验
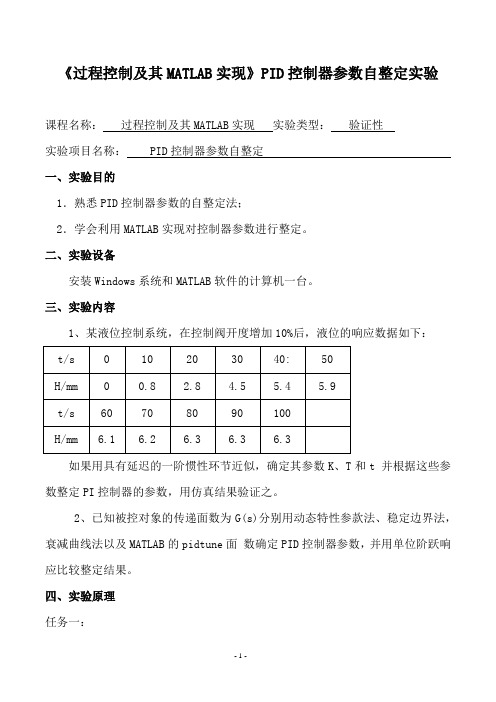
《过程控制及其MATLAB实现》PID控制器参数自整定实验课程名称:过程控制及其MATLAB实现实验类型:验证性实验项目名称: PID控制器参数自整定一、实验目的1.熟悉PID控制器参数的自整定法;2.学会利用MATLAB实现对控制器参数进行整定。
二、实验设备安装Windows系统和MATLAB软件的计算机一台。
三、实验内容1、某液位控制系统,在控制阀开度增加10%后,液位的响应数据如下:如果用具有延迟的一阶惯性环节近似,确定其参数K、T和t 并根据这些参数整定PI控制器的参数,用仿真结果验证之。
2、已知被控对象的传递面数为G(s)分别用动态特性参款法、稳定边界法,衰减曲线法以及MATLAB的pidtune面数确定PID控制器参数,并用单位阶跃响应比较整定结果。
四、实验原理任务一:该曲线可以近似用带纯延迟的一阶惯性环节式子来拟合,即依据书中公式增益可以用切线法、两点法等方法来求传递函数参数:任务二:1、动态特性参数法:该方法通过观察被控对象的单位阶跃响应曲线,提取出关键的动态特性参数,然后根据这些参数结合经验公式计算出 PID 控制器的参数;2、稳定边界法:该方法是基于被控对象的频域特性进行整定的,它通过绘制被控对象的开环频率响应曲线,找到最接近于稳定极点的相位交点,然后利用该相位交点计算出相位裕度和增益裕度,再根据一定的经验公式计算出 P ID 控制器的参数;3、衰减曲线法:该方法也是基于被控对象的单位阶跃响应曲线进行整定的,它通过绘制被控对象的阶跃响应曲线,根据经验公式计算出该曲线的衰减系数和周期,然后利用这些参数计算出 PID 控制器的参数;4、 MATLAB 的 pidtune 函数:该函数是 MATLAB 提供的自动 PID 控制器设计工具,它可以根据用户指定的性能要求(如超调量、调节时间等)以及被控对象的传递函数,自动计算出最优的 PID 控制器参数。
五、实验步骤任务一:某液位控制系统,在控制阀开度增加10%后,液位的响应数据如下:由数据两点法计算可得可知:t=9,T=18,K=6.3/0.1=63。
基于组态王、Excel和Matlab的PID自整定仿真软件

基于组态王、Excel和Matlab的PID自整定仿真软件
徐江华;孙荣;邵惠鹤
【期刊名称】《计算机工程》
【年(卷),期】2003(029)003
【摘要】提出了基于组态王、Excel 和 Matlab 的PID自整定仿真软件.该仿真软件用Matlab完成PID自整定算法,用组态王工控软件实现复杂、友好的图形界面,Excel作为Matlab和组态王的数据库.三者之间通过DDE协议进行数据链接.【总页数】3页(P27-29)
【作者】徐江华;孙荣;邵惠鹤
【作者单位】上海交通大学自动化研究所,上海,200030;上海交通大学自动化研究所,上海,200030;上海交通大学自动化研究所,上海,200030
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于组态王、EXCEL和MATLAB的液位控制仿真平台研究 [J], 杨扬;朱文玉;赵法瑞
2.基于组态王的电动机控制线路仿真软件设计 [J], 罗超;樊伟
3.基于组态王Excel VBA的数据监控系统设计 [J], 苏建元;徐文权
4.基于组态王的Excel工业报表系统 [J], 马立阁
5.基于组态王与Matlab的三容水箱多变量虚拟控制系统 [J], 吴仲民;郑帅;徐刚;杨春曦
因版权原因,仅展示原文概要,查看原文内容请购买。