无人机发动机电喷系统设计方案
无人机的电子系统设计与优化
无人机的电子系统设计与优化无人机的电子系统设计与优化无人机作为一种重要的航空器,其电子系统的设计和优化对其性能和功能的发展起着至关重要的作用。
本文将从无人机的电子系统设计和优化的角度出发,探讨其关键技术和挑战,并提出一些解决方案。
一、无人机电子系统的设计要求无人机的电子系统设计要求既要满足飞行性能和安全的要求,又要提供可靠的数据链接和传感器输出。
尤其对于军事无人机,其电子系统的设计更加关键,需要提供全天候、长程、高精度的目标探测、识别和跟踪等功能。
1. 飞行性能和安全要求无人机的电子系统需要能够提供稳定的飞行控制、导航和定位功能。
飞行控制系统包括姿态控制、高度和航向控制等。
导航和定位系统则需要提供准确的位置信息,包括GPS、惯性导航和视觉导航等。
2. 数据链接和传感器输出要求无人机的电子系统需要提供可靠的数据链接和传感器输出,包括视频传输、数据通信和传感器数据输出。
对于军事无人机来说,数据链接的安全性也是非常重要的,需要采取加密和防护措施。
二、无人机电子系统的关键技术无人机的电子系统设计需要解决一系列关键技术问题,包括飞行控制、导航和定位、数据链接和传感器输出等方面。
1. 飞行控制技术无人机的飞行控制技术是保证其稳定飞行和精确操控的基础。
目前,常用的飞行控制技术包括PID控制、模糊控制和神经网络控制等。
此外,强化学习等新兴技术也逐渐应用到无人机的飞行控制中。
2. 导航和定位技术无人机的导航和定位技术是实现准确导航和定位的关键。
常用的导航技术包括GPS、惯性导航和视觉导航等。
此外,还可以利用无线电信号、地面雷达和卫星星座等辅助导航。
3. 数据链接和传感器输出技术无人机的数据链接和传感器输出技术是实现可靠数据传输和获取的关键。
常用的数据链接技术包括无线电通信、卫星通信和光纤通信等。
传感器输出技术则包括图像传感器、红外传感器和雷达传感器等。
三、无人机电子系统设计的挑战无人机的电子系统设计面临着一系列的挑战,包括性能和功能要求的提高、系统集成和模块化等方面。
无人机喷洒农药控制系统设计

无人机喷洒农药控制系统设计陈爱国(泰州学院,江苏泰州225300)摘 要:农药喷洒采用无人机技术能减少环境污染、提高喷洒效率。
现对无人机的控制量进行重点设计,使无人机能够精确跟踪无线指令,满足现代农业对农药喷洒的需求。
关键词:多旋翼无人机;农药喷洒;控制系统;设计0 引言我国是农业大国,其农药喷洒主要由人工完成,这种方式已经严重威胁到工作人员的身心健康,且对农药的利用率低。
无人驾驶飞机UAV(UnmannedAerialVehicle)是近年来发展比较快、在很多领域都有应用的一种新技术装备,在农业生产中使用多旋翼无人机技术进行农药喷洒作业有独特的优点,比如作业高度低、定点定向喷洒、解放人力、效率高、维修成本低等,特别是旋翼产生的涡流,可以使农药喷雾更好地附着在农作物上,提高农药防治病虫害的效率。
1 总体设计无人机结构简单、维修方便,其控制系统一般采用模块化设计,总体结构如图1所示。
图1 系统组成框图多旋翼无人机的结构比较复杂,它需控制6个自由度,需要利用精度高的传感器和精确的姿态数据。
与无人机通讯采用无线方式,主要控制旋翼电机,控制电机的信号一般采用PWM波形即可,输出给电子调速器。
2 硬件设计硬件的选择较为关键,在系统设计时需充分考虑微处理器的数据处理精度和浮点运算能力、传感器型号、各类芯片级联电平的匹配等问题。
比如微处理器采用STM32F427VIT6,集成加速度和三轴陀螺仪的MPU6000芯片,电子罗盘采用HMC5843芯片,气压传感器采用MS5611芯片。
在无线通讯时,直接采用PPM(PulsePositionModulation)方式对控制系统进行信号的控制,为了更好地控制无人机姿态,还需采用超声波测距模块,用来锁定无人机的高度。
硬件系统结构设计如图2所示,无人机运行时,旋翼电机产生的电流较大,且无人机姿势不断变化,其控制电流随之变化,会产生电磁干扰,造成通讯控制信号出错,特别是超声波测距模块与控制芯片不能直接级联,需要进行电平转换,如图3所示。
基于PWM的无人机精准变量喷洒系统方案设计
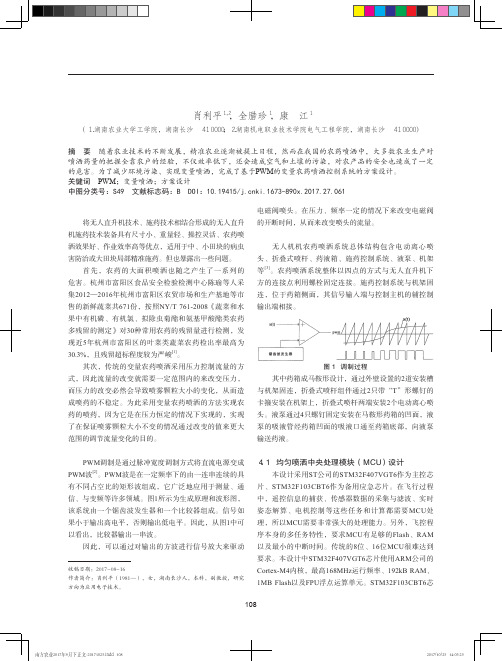
图1 调制过程
其中药箱成马鞍形设计,通过外壁设置的2道安装槽与机架固连,折叠式喷杆组件通过2只带“T”形螺钉的卡箍安装在机架上,折叠式喷杆两端安装2个电动离心喷头。
液泵通过4只螺钉固定安装在马鞍形药箱的凹面,液泵的吸液管经药箱凹面的吸液口通至药箱底部,向液泵输送药液。
4 均匀喷洒控制系统方案设计
4.1 均匀喷洒中央处理模块(MCU)设计
本设计采用ST公司的STM32F407VGT6作为主控芯片、STM32F103CBT6作为备用应急芯片。
在飞行过程中,遥控信息的捕获、传感器数据的采集与滤波、实时姿态解算、电机控制等这些任务和计算都需要MCU处理,所以MCU需要非常强大的处理能力。
另外,飞控程序本身的多任务特性,要求MCU有足够的Flash、RAM 以及最小的中断时间。
传统的8位、16位MCU很难达到要求。
本设计中STM32F407VGT6芯片使用ARM公司的Cortex-M4内核,最高168MHz运行频率、192kB RAM、1MB Flash以及FPU浮点运算单元。
STM32F103CBT6芯
图2 直流LCD液晶数显电压表
5 结语
无人直升机技术、施药技术相结合形成的无人直升机施药技术装备适用于中、小田块的病虫害防治或大田块局部精准施药。
针对农药的大面积喷洒产生的农药残留危害和传统的变量农药喷洒从而造成喷药的不稳定,本文完成了基于PWM的变量农药喷洒控制系统的总体结构设计以及均匀喷洒控制系统MCU、电源、继电器、电磁阀、增压泵、显示等模块的方案设计。
参考文献
[1]陈瑜,袁新跃,张培洪,等.2012—2016年杭州市富阳区。
新型无人机的动力系统设计与优化

新型无人机的动力系统设计与优化在当今科技飞速发展的时代,无人机已经在众多领域展现出了其独特的价值和广阔的应用前景。
从农业植保到影视拍摄,从物流配送再到军事侦察,无人机的身影无处不在。
而在无人机的众多组成部分中,动力系统无疑是其核心之一,它直接决定了无人机的飞行性能、续航能力、负载能力以及工作的可靠性。
因此,新型无人机动力系统的设计与优化成为了众多科研人员和工程师们关注的焦点。
一、新型无人机动力系统的类型与特点目前,常见的新型无人机动力系统主要包括电动动力系统、油动动力系统以及混合动力系统。
电动动力系统具有结构简单、维护方便、噪声低等优点。
其主要由电池、电机和电子调速器组成。
电池为电机提供能量,电子调速器则用于控制电机的转速。
然而,电动动力系统的续航能力往往受到电池容量的限制。
油动动力系统则通常以燃油发动机为核心,具有较高的能量密度,能够提供较长的续航时间。
但油动系统相对较为复杂,噪声较大,且对燃油的品质和维护要求较高。
混合动力系统结合了电动和油动的优势,通过合理的能量管理策略,在不同的工作场景下切换使用不同的动力源,以达到最优的性能表现。
二、新型无人机动力系统设计的关键因素1、功率与重量比在设计动力系统时,需要确保其能够提供足够的功率以满足无人机的飞行需求,同时要尽量减轻系统的重量。
这就要求在选择电机、发动机、电池等部件时,进行精细的权衡和优化。
2、能量密度对于电动动力系统,电池的能量密度至关重要。
高能量密度的电池能够在相同重量下提供更长的续航时间。
而对于油动系统,燃油的能量密度也是影响续航的关键因素。
3、效率动力系统的效率直接关系到能量的利用效率和续航能力。
无论是电机、发动机还是传动系统,都需要追求高效率的工作状态。
4、可靠性无人机在工作中可能面临各种复杂的环境和工况,动力系统必须具备高度的可靠性,以确保无人机能够稳定、安全地飞行。
三、新型无人机动力系统的优化策略1、材料创新采用新型的轻质高强材料,如碳纤维、钛合金等,减轻动力系统各部件的重量,同时提高其强度和耐用性。
无人机动力系统设计与优化

无人机动力系统设计与优化随着科技的迅速发展,无人机在各个领域的应用日益广泛,从军事侦察到民用的航拍、物流配送,甚至农业植保等。
而无人机的动力系统作为其核心组成部分,直接影响着无人机的性能、续航能力、飞行稳定性以及任务执行能力。
一个优秀的无人机动力系统设计与优化方案,对于提升无人机的整体表现至关重要。
无人机动力系统主要由能源供应部分(如电池、燃油)、动力转换装置(如电机、内燃机)以及螺旋桨等部件组成。
不同类型的无人机,根据其任务需求和使用场景,对动力系统的要求也各不相同。
在能源供应方面,电池是目前小型无人机最常用的能源。
锂电池因其高能量密度和相对较轻的重量,成为了主流选择。
然而,锂电池也存在一些局限性,比如充电时间长、循环寿命有限以及在低温环境下性能下降等问题。
为了克服这些问题,科研人员正在不断探索新的电池技术,如固态电池、锂硫电池等。
这些新型电池具有更高的能量密度和更好的性能表现,有望在未来的无人机动力系统中得到广泛应用。
燃油动力系统则在大型无人机中较为常见,尤其是需要长时间飞行和承载较大负载的情况。
内燃机能够提供较高的功率输出,但同时也存在着重量大、噪音高、排放污染等问题。
为了提高燃油的利用效率,发动机的设计和优化至关重要。
采用先进的燃烧技术、涡轮增压以及轻量化材料等手段,可以有效提高发动机的性能,并降低油耗和排放。
动力转换装置是将能源转化为机械能的关键部件。
电机具有响应速度快、控制精度高、维护成本低等优点,在电动无人机中得到了广泛应用。
无刷直流电机由于其高效、可靠的性能,成为了大多数电动无人机的首选。
而在一些对功率要求较高的无人机中,可能会采用交流电机或者多个电机协同工作的方式。
内燃机作为燃油动力系统的核心,其性能直接影响着整个无人机的动力输出。
通过优化气缸结构、进气和排气系统、燃油喷射系统等,可以提高内燃机的功率和扭矩输出,同时降低油耗和排放。
此外,采用可变气门正时、缸内直喷等先进技术,也能够进一步提升内燃机的性能。
航模无人机微型涡轮喷气发动机结构与设计
航模无人机微型涡轮喷气发动机结构与设计下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!航模无人机微型涡轮喷气发动机结构与设计引言在航模领域,微型涡轮喷气发动机作为动力系统的重要组成部分,其结构与设计至关重要。
一种无人机的带电喷涂装置的设计与使用
一种无人机的带电喷涂装置的设计与使用1引言无人机具有成本低、效率高、机动性高等优点,在电力巡检中得到广泛应用。
无人机已广泛用于电网巡检,其中无人机巡检等应用已在电网大规模推广使用[1-3]。
无人机用于检修目前还处于探索阶段,其中无人机憎水性检查、无人机喷火除障等技术已经应用于实际工作中,带电喷涂技术已日益成熟。
本装置立足解决目前输电线路防污闪应急措施的难点和盲点,通过无人机荷载拓展研发,设计一套无人机带电喷涂装置,能够满足在偶发污闪的情况下,开展带电喷涂,实现在短时间内遏制污闪的发展,确保输电线路安全稳定运行。
2.无人机简介该重型无人机是风迈专为行业大负载场景开发的特种无人机,搭载E5000动力系统,支持5m/s的上升速度,含有最大的旋转角速度150°/s。
RTKGNSS是专为该飞行器适配飞行控制系统开发的高精度导航定位系统,通过实时动态差分技术将三维定位精度由米级提升至厘米级,集成定位、定高和测向功能,弥补了传统GPS、气压计和指南针的不足。
水平:1cm+1ppm垂直:2cm+1ppm。
具备抗输电线路电场干扰能力,能够在接近电场飞行过程中不丢星,无人机不出现异常停转,异常掉落。
定位精度厘米级。
带电水喷涂装置采用了矢量喷口技术,可以多角度瞄准目标物.更精确地对绝缘子的部分进行喷涂。
通过定制喷射泵,能够喷射水性喷涂液,这样的设计既可以保证喷涂材料尽可能地集中喷向喷涂的部位,更有力地覆盖绝缘子上的缺陷。
通过独立隔离设计供电,避免因导体水柱流入而引起大功率电机导致整机失电。
通过喷嘴的密封设计,可以有效防止喷嘴因为异物的出现发生堵塞。
无人机装备了相应的电子罗盘。
飞行器转动时会实时进行罗盘校准,让罗盘在飞行过程中保持最佳状态;同时自动检测罗盘干抗情况[4-5]。
无人机自动选用最优罗盘稳定航向;在无罗盘情况下,飞控会智能分析GPS运动机迹自动又守准航向。
这样可以增加无人机作业的准确率,可以快速将喷头对准作业区域,也减少了因碰撞发生的无人机碰撞事故。
无人机二冲程发动机燃油电喷系统微型高压油泵的生产技术

本技术新型公开了无人机二冲程发动机燃油电喷系统微型高压油泵,包括微电脑单片机控制器、微型高压油泵、油压传感器、外壳和安装固定零件,微电脑单片机控制器垂直放置在外壳的一端,油压传感器的进油孔与微型高压油泵的出油口用安装固定零件连接,安装固定零件的另一端连接微型高压油泵的进油口,微型高压燃油泵底部设有储油腔。
本技术新型是一种提供给以二冲程燃油发动机为动力的微型高压燃油泵,油压传感器的接头与微型高压燃油泵的出油口相连。
无人机二冲程发动机燃油电喷系统使用的微型高压油泵是无人机二冲程发动机燃油电喷系统中的重要组成部件,它对无人机的安全正常飞行起着至关重要的作用。
技术要求1.无人机二冲程发动机燃油电喷系统微型高压油泵,其特征在于,包括微电脑单片机控制器、微型高压油泵、油压传感器、外壳和安装固定零件,微电脑单片机控制器垂直放置在外壳的一端,油压传感器的进油孔与微型高压油泵的出油口用安装固定零件连接,通过O型密封圈压紧密封;安装固定零件的另一端连接微型高压油泵的进油口,同样采用O 型密封圈压紧密封;微型高压燃油泵底部设有储油腔,微型高压油泵的进油口通过安装固定零件内部通道与叶轮前方相连,叶轮后方与出油口和油压传感器的进油孔分别相连。
2.根据权利要求1所述无人机二冲程发动机燃油电喷系统微型高压油泵,其特征在于,所述安装固定零件用灌装胶固定密封在外壳内。
3.根据权利要求1所述无人机二冲程发动机燃油电喷系统微型高压油泵,其特征在于,所述进油口与出油口上分别设有压紧螺帽。
4.根据权利要求1所述无人机二冲程发动机燃油电喷系统微型高压油泵,其特征在于,所述微电脑单片机控制器包括单片机主芯片、执行控制芯片和控制继电器,油压传感器和控制继电器安装在微电脑单片机控制器边缘。
5.根据权利要求1所述的无人机二冲程发动机燃油电喷系统微型高压油泵,其特征在于,所述外壳前后端分别设有两个安装孔。
技术说明书无人机二冲程发动机燃油电喷系统微型高压油泵技术领域本技术新型涉及液体输送自动控制技术领域,具体是一种无人机二冲程发动机燃油电喷系统使用的微型高压油泵。
基于单片机的喷雾电机控制系统设计实践
基于单片机的喷雾电机控制系统设计实践随着社会的不断发展,人们对环境的要求也越来越高。
在许多的场所,无论是公共场所还是私人场所,我们都需要使用到喷雾机来进行清洁、杀菌、除螨等处理。
然而,传统的喷雾机控制方式存在着一定的局限性,需要人工来控制喷雾机的开关,效率低下,而且也存在着一定的安全隐患。
因此,我们需要一种基于单片机的喷雾电机控制系统,来提高清洁处理的效率,保证使用的安全性。
一、系统方案设计1.系统总体设计基于单片机的喷雾电机控制系统主要由单片机模块、电机模块和喷嘴模块三个模块组成。
其中,单片机模块作为车间监控控制中心,负责喷雾电机的控制和监测喷雾效果,电机模块作为震动源,起到将能量传递到喷嘴的作用,喷嘴模块负责将水雾喷出。
2.硬件设计方案单片机选用STM32F103C8T6型号的芯片,主频为72MHz,控制器采用键盘、液晶显示屏、DC电机驱动电路、电机反馈电路、温湿度传感器等基础硬件。
电机模块选用采用强力磁钢材料生产的微小型单相减速电机,输出功率为1/4,额定电压为3V,额定转速为8000rpm,喷嘴模块选用超声波喷雾器,频率为1.7MHz,最大出水量为1.2L/h。
3.软件设计方案单片机的程序控制采用C语言编写,主要包含喷雾电机的控制程序和喷嘴控制程序。
喷雾电机控制程序主要包含开启喷雾电机、关闭喷雾电机、设置喷雾电机工作时间、检测喷雾效果等功能;喷嘴控制程序主要包含开启超声波驱动、设置毫秒延时时间、关闭超声波驱动等功能。
二、实践测试为了验证本方案的实际可行性,我们制作了一套基于单片机的喷雾电机控制系统,并进行了相关测试。
1.系统测试通过测试,我们发现本设计方案能够很好地控制喷雾电机和超声波喷嘴,喷雾效果稳定,能够达到预期的效果。
2.效果测试我们将设计的喷雾电机控制系统应用到实际使用场所,并进行了一定的效果测试。
测试结果表明,基于单片机的喷雾电机控制系统在清洁、杀菌、除螨等方面的效果明显优于传统的喷雾机控制方式。
一种小型无人机农药喷洒系统设计

无人机多年来一直是航空领域研究的热点,在实际应用中存在大量的需求。
在农业中,采用无人机进行农药喷洒具有作业高度低,飘移少,可空中悬停,无需专用起降机场,旋翼产生的向下气流有助于增加雾流对作物的穿透性,防治效果高等特点,因此,超低空无人机喷施技术已成为农药喷洒技术的研究热点之一。
本研究利用脉宽调制技术设计了一种机载农药变量喷洒装置,通过PWM 控制继电器的开闭来改变液泵的工作时长,从而改变农药喷洒速率,扩大了机载农药喷洒装置的适用范围,降低了农药喷洒成本,提高了农药喷洒效率。
一、机载农药变量喷洒系统结构用于农药喷洒的无人机系统主要由无人机机体及机载农药喷洒系统组成。
采用无人机为多旋翼结构。
主要由动力系统、飞行器主体和控制系统组成。
机载农药喷洒系统包括药箱、喷头、悬臂、液泵、喷洒控制板、控制线以及水管。
当进行农药喷洒时,操作人员开启远程无线遥控器上的喷洒控制开关,无线遥控器根据开关位置将喷洒控制信号发送给安装在无人机上的无线接收机,喷洒控制板收到无线接收机传输过来的喷洒控制信号后,通过控制线对液泵进行PWM 控制,通过改变PWM 的占空比来改变液泵的工作时长,从而改变农药喷洒流量,实现变量喷洒。
二、喷洒控制器设计控制器的设计采用AVR 公司的ATmega16单片机作为微处理器,以12V 聚合物锂电池作为电源,直接为液泵供电,并通过5V 稳压电路将12V 电压转换成5V 电压,为接收机、液泵驱动电路及单片机主控电路供电。
其中,接收机〔摘要〕基于脉宽调制(PWM )技术设计小型无人机机载农药变量喷洒系统,主要由药箱、喷头、液泵及喷洒控制器组成,通过调整PWM 喷洒控制信号的占空比,改变液泵的工作时长,从而实现变量喷洒。
〔关键词〕无人机;喷洒系统;变量喷洒;脉宽调制一种小型无人机农药喷洒系统设计因郑德鲁(青岛工学院,山东胶州266300)GUANGXI NONGYE JIXIEHUA用于接收远程无线遥控器发送过来的农药喷洒控制信号;液泵驱动电路用于控制液泵的开关及其工作时间。
无人飞行器发动机控制系统设计和实现

无人飞行器发动机控制系统设计与实现iiAbstractAero-engine is the power source of Unmanned Air Vehicle (UA V), its dynamicand static characteristics directly affect the performances of UA V. Engine control is the foundation of UA V flight control system, and the key factor to realize autonomous flight. An excellent Engine Control System (ECS) doesn’t exist without the supports of corresponding hardware and control algorithm. This paper focuses on the design and implementation of software and hardware and the design of ECS control law.Firstly, the constituent parts, the architecture and the functions of ECS were designed according to the requirements of engine control. Secondly, the requirement analyses about hardware were made, the devices such as flight control computer, sensors, data-link units and ground control station were selected, and then the hardware architecture of ECS was achieved. Through analyses and comparisons of different software development environments, the appropriate one was chosen. By using it, the airborne programs of engine controller with real-time performance and reliability were developed; the control and monitoring software running on ground station with perfect functions, easy operations and convenient transplantation were then developed. Thirdly, the adaptive PID control concepts were introduced to design an engine controller which adaptively adjusts PID parameters under different work conditions and improves the engine control effectiveness. Finally, engine tests were built to validate the capability and functionality of ECS and a hardware-in-the-loop simulation experiment was conducted to verify the control performance of adaptive PID controller. The results show the ECS meet the requirement of UA V flight control.Key Words: UA V, Engine Control, Platform of Software and Hardware,Adaptive PID, Engine Test, Hardware-in-the-loop Simulation无人飞行器发动机控制系统设计与实现vi图·表清单图2.1 HIRTH 3203E活塞式发动机 (6)图2.2 发动机控制系统示意图 (8)图2.3 发动机控制系统原理结构图 (9)图2.4 PID控制原理框图 (10)图2.5 位置反馈式舵回路原理方框图 (11)图3.1 嵌入式计算机SPT200 (15)图3.2 串行扩展模块EMERALD -EMM-8M-XT (16)图3.3 数据采集转换模块DIAMOND-MM-16-AT (16)图3.4 电源供给模块JUPITER-MM-SIO (16)图3.5 温度传感器 (17)图3.6 K型热电偶NR-40A (17)图3.7 单片K型热电偶放大与数字转换器 (17)图3.8 精密气压高度计HPA200 (17)图3.9 EX-20系列光电传感器 (19)图3.10 无线通信电台MDS EL705 (20)图3.11 无线数据网络MDS iNET 900 (20)图3.12 交换机TP-Link TL-SF1016 (20)图3.13 地面站系统 (21)图3.14 发动机控制系统的硬件结构图 (22)图4.1 VxWorks基本体系结构 (25)图4.2 VxWorks系统宿主机和目标机 (28)图4.3 Vxworks运行环境建立过程 (28)图4.4 发动机控制器程序流程图 (30)图4.5 地面站控制界面截图 (33)图4.6 参数设置对话框 (34)图4.7 数据监视程序流程图 (35)图4.8 数据监视界面 (36)南京航空航天大学硕士学位论文图4.9 ODBC原理示意图 (37)图4.10 异步通信协议数据格式 (40)图4.11 D型9针串口连接(RS-232C标准) (41)图5.1 自适应系统的基本结构 (44)图5.2 模型参考自适应控制系统 MRAS原理框图 (45)图5.3 自校正控制系统STC原理框图 (46)图5.4 自适应PID控制器结构图 (49)图5.5 单位阶跃响应 (49)图5.6 模型库机构结构图 (51)图5.7 阶跃响应曲线 (52)图5.8 动态性能指标与Kp和Ki的线性关系 (53)图6.1 台架试车系统结构图 (55)图6.2 发动机台架试车转速曲线 (56)图6.3 并车试验转速曲线 (57)图6.4 未安装旋翼的转速曲线 (58)图6.5 安装旋翼的转速曲线 (58)图6.6 半物理仿真系统结构图 (60)图6.7 传统PID控制器的转速曲线 (61)图6.8 自适应PID控制器的转速曲线 (61)表3-1 地面站系统组成 (21)表5-1 不同总距下发动机数学模型的动态参数 (48)vii无人飞行器发动机控制系统设计与实现viii 注释表符号序号缩写注释说明1 P 大气压力2 T 大气温度3 Ωs转速设定量4 φ旋翼总距5 K p比例系数6 K i积分系数7 K d微分系数8 δ舵偏角9 m f油门量10 u 输出量11 e误差量12 σ超调量13 T L上升时间14 T s调节时间15 T d延迟时间16 T p峰值时间缩略词序号缩写英文全称中文名称1 UA V Unmanned Air Vehicle 无人飞行器2 ECS Engine Control System 发动机控制系统3 SBC Single Board Computer 单板计算机南京航空航天大学硕士学位论文ix4 PPT Precision Pressure Transducer 精密智能压力传感器5 ECU Electronic Control Unit 电子控制单元6 RTOS Real Time Operating System 实时操作系统7 CPU Central Processing Unit 中央处理器8 BSP Board Support Package 板级支持包9 ATL Active Template Library 活动模板库 10 MFC Microsoft Foundation Class Library 微软基础类库 11 ODBC Open Database Connectivity 开放数据库连接 12DBMSDataBase Management System 数据库管理系统 13 MRAS Model Reference Adaptive ControlSystem模型参考自适应控制系统 14 STCSelf-Tuning Control自校正控制承诺书本人郑重声明所呈交的学位论文是本人在导师指导下独立进行研究工作所取得的成果尽我所知除文中已经注明引用的内容外本学位论文的研究成果不包含任何他人享有著作权的内容对本论文所涉及的研究工作做出贡献的其他个人和集体均已在文中以明确方式标明本人授权南京航空航天大学可以有权保留送交论文的复印件允许论文被查阅和借阅,可以将学位论文的全部或部分内容编入有关数据库进行检索可以采用影印缩印或其他复制手段保存论文作者签名日期南京航空航天大学硕士学位论文1第一章 绪论1.1 无人飞行器与其发动机控制系统某型无人飞行器从类型上属于一种无人直升机无人直升机在无人机的基础上兼有直升机的特点无人机是一种通过地面站无线遥控操纵或自主程序控制的无人驾驶飞机其结构简单造价低廉生存能力强机动性好能够完成有人驾驶飞机不能完成的任务直升机则有如下优点不需要专用的机场和跑道能够在较为恶劣的条件下垂直上升或下降具有良好的飞行能力能够空中悬停原地转弯前飞后飞和侧飞等可长时间悬停贴近地面飞行或利用地形地物隐蔽飞行若发动机发生故障空中停车直升机可以利用旋翼自转下滑安全着陆无人直升机的这些特点使其在军事民用工业科研等领域受到高度的重视且得到广泛的应用军用方面无人直升机主要用于战场侦察通信中继通信情报侦察军事测绘探测战场上大规模杀伤性武器有害物质)与其他空中平台协同作战与卫星或预警机组成多双基地雷达预警侦察系统信息战电子干扰及对敌防空兵压制等[1]民用方面无人直升机可以在地形复杂山高林密地势险峻交通不便的条件下进行无准备的场地起降承担开发中的勘测航拍等任务还可用于工业灾难探测和预报探寻资源播种造林植草喷洒农药和施肥等[2]此外无人直升机自主飞行技术本身可能融合了人工智能图像处理无线传输先进控制多传感器融合以及先进制造等等尖端技术是一个非常优越的交叉学科研究平台航空发动机作为飞行器的动力来源其动静态性能将直接影响飞行器的飞行品质先进飞行器的航空发动机由于要求高推重比低燃油量长使用寿命和大灵活性而日益复杂这也导致了发动机控制系统的复杂性不断增加从早先的机械液压控制系统到现在的数字电子式控制系统一代接一代发展得异常迅速早在五十年代由于经典控制理论在发动机控制中的应用航空发动机控制系统开始采用机械液压式控制器它能很好的实现单变量控制[3]经过半个世无人飞行器发动机控制系统设计与实现2纪的发展机械液压控制系统已十分成熟和完善随着控制参数的增多以及发动机性能的逐步提高使得发动机的控制规律日益复杂和精确单靠机械液压控制系统很难胜任这样复杂的控制工作[4]随着电子计算机技术的不断发展用计算机作为控制器的发动机控制系统正逐步新起出现了数字电子式控制系统作为现代航空发动机控制技术中的一项新技术航空发动机数字电子控制系统是以计算机为核心通过计算机的数字计算能力和逻辑处理能力来完成发动机的各项计算改善发动机的操作性[5]相对于采用机械液压式控制器而言数字电子控制器可使发动机控制系统具有更高的性能和控制精度数字控制软件和控制算法也更易于修改和更换从而缩短了控制系统的研制周期降低了研制费用此外数字式电子控制器极强的逻辑判断功能使得控制系统的故障隔离措施容错技术控制器切换过程等更易于实现极大地提高发动机控制系统的可靠性[6]由此可见数字电子控制系统将是航空发动机的一种主要发展趋势有着良好的发展前景1.2 论文的研究背景和意义1.2.1 国内外背景情况 1 关于无人直升机的发展从五十年代起国外许多国家就开始了对这种兼有无人机与直升机特点的无人直升机进行相关技术的研究并取得了一定的进展美国波音公司美国Frontier 公司麻省理工学院欧洲的欧洲战术航宇集团(TAG)瑞士苏黎世联邦技术学院测试与控制实验室澳大利亚联邦科学与工业研究组织(CSIRO)俄罗斯卡莫夫设计局日本富士重工日本Yamaha 公司等都在以自主或合作的方式进行无人直升机的研究和开发相继研制出了A-160“蜂鸟”iSTAR X-Cell60TAG-M80Ka-137R-Max 等型号的无人直升机国内无人直升机的研制起步较晚始于上世纪90年代南京航空航天大学于1990年开始研制“翔鸟”无人直升机于1996年首飞成功北京航空航天大学研制了共轴双旋翼“海鸥”无人直升机和小型航模无人直升机M-22前者于1995年首飞后改型为M18无人直升机后者可通过目视遥控其全尺寸实体模型曾参加过1997年珠海航展上海雏鹰科技有限公司与南京航空航天大学合作南京航空航天大学硕士学位论文3将美国的“Mini-500”单座有人驾驶直升机改制成 “LE-110” 无人直升机该无人机已于2002年实现了悬停飞行2003年进行了定点悬停和前飞试验现正在进一步完善中[7]2 关于航空发动机控制系统的发展国外发达国家很早就开始了航空发动机数控系统的研究从1973年开始美国制定了针对普惠公司F100发动机控制系统的研究并与1983年完成了飞行试验计划到上世纪八十年代中期第一代航空发动机数控系统就开始投入军用和民用发动机现役使用而今经过近二十多年的发展其航空发动机数控系统正朝着分布式智能化的方向发展[8][9]通过不断的学习与研究国内航空发动机控制系统的发展也取得了一定的成就上世纪九十年代我国也积极开展了发动机数字电子控制系统的相关研究并于1991年以WP13AII 发动机为验证平台进行发动机数控系统的研制工作经过多年的努力已完成我国第一代航空发动机数控系统上天样机的研制并通过了多项试车考核最新研制的WZ9发动机采用数字电子控制系统也于不久进行了科研试飞[4] 1.2.2 论文的研究意义某型无人飞行器采用活塞式发动机通过旋翼高速旋转提供飞行动力在其飞行控制系统中发动机自动控制是实现该无人飞行器自主飞行的前提和关键对发动机控制系统的要求主要是结构合理功能齐全运行稳定具有良好的实时性等等能够满足不同飞行科目的需求为无人飞行器在不同工作状态下稳定飞行提供强有力的保证所以发动机控制系统的设计就需要针对上述要求来完成从硬件平台的构建到控制软件的开发在确保无人飞行器安全稳定飞行的条件下使得设计出的控制系统最大限度发挥发动机的功能发动机具有非线性特性作为无人飞行器动力驱动源它的动态响应特性会随无人飞行器飞行状况改变而变化为此发动机控制效果不仅与发动机自身动态特性有关还与无人飞行器的飞行状态有关传统PID 控制算法简单鲁棒性好可靠性高广泛应用于工业控制航空航天等领域但是对于具有非线性特性的发动机在其工况变化时PID 参数的整定显得较为复杂如果参数整定不良则导致系统性能欠佳对发动机工况的适应性不够理想随着控制理论的不断发展控制方法也出现了各种分支如专家系统模糊逻辑神无人飞行器发动机控制系统设计与实现4经网络灰色系统理论等它们和传统的PID 控制策略相结合又派生出各种新型的PID 类控制器很多算法大大改进了传统PID 控制器的性能采用自适应控制技术可以设计自适应PID 控制和进行PID 的自整定[10]基于以上的考虑在论文研究的项目中根据某型无人飞行器这一特定的应用平台设计开发了相应的发动机控制系统并对一种自适应PID 控制策略进行了半物理仿真验证其主要意义在于1机载控制器的开发基于PC104硬件结构和VxWorks 嵌入式操作系统开发体系和现行大多数平台兼容方便使用熟悉的开发手段进行项目的开发并且嵌入式的体系也保证了系统的可靠性扩展性和实时性要求2地面站操控与监视系统功能完善能够满足发动机控制系统以及整个飞行控制系统研发过程的需求3自适应PID 控制的提出为无人飞行器发动机控制研究和发展探索了新的方向4该课题项目的实现手段研究成果具有较为广泛的适用性可以用于其它控制系统的开发和研究中1.3 论文的主要内容本课题是在某型无人飞行器试验机研制项目支持下在武器装备预研资金资助下进行的课题的主要工作就是研制某型无人飞行器的发动机控制系统为最终实现该无人飞行器自主飞行控制奠定基础论文中构建了合适的硬件体系并开发相应的控制软件通过台架试车和地面试车来验证该控制系统的控制效果根据无人飞行器发动机的特性提出了一种自适应PID 控制方法并进行了相关内容的研究以及半物理仿真验证本文共分六章第一章绪论介绍了无人飞行器发动机控制系统的概况国内外研究背景以及本文的研究意义第二章发动机控制系统设计按照某型号无人飞行器发动机控制系统的需求设计发动机控制系统的组成结构和功能第三章发动机控制系统的硬件平台研制针对具体的设计标准和要求分析发动机控制系统所必须具备的机载计算机传感器数据通信以及地面站南京航空航天大学硕士学位论文5所需的硬件设备并构建发动机控制系统的硬件平台第四章发动机控制系统的软件实现简要介绍了控制软件的开发环境后分别对机载发动机控制器程序与地面站操控与监视软件进行详细的设计与分析完成了控制软件的开发 第五章发动机的自适应PID 控制根据发动机工况变化时传统PID 控制对无人飞行器发动机的控制效果不够理想这一情况采用自适应PID 控制方法使得控制参数在飞行器旋翼总距变化时能够进行自适应调节从而改善控制效果第六章发动机试车与半物理仿真通过台架试车和地面试车的方法检验发动机控制系统的性能和功能使用半物理仿真的方法对自适应PID 控制器的控制效果进行验证并给出分析结果最后在总结与展望中对所做工作做出总结概述了研究成果同时也指出存在的问题及今后的工作方向无人飞行器发动机控制系统设计与实现6第二章 发动机控制系统设计2.1 发动机性能参数本系统所使用的被控对象如图2.1所示为德国HIRTH 公司生产的3203E型发动机该发动机为双缸双冲程风冷活塞式发动机重量31kg 排量625cm3功率47.8kW 最大转速6500转/分钟最大扭矩72.4Nm 该发动机有较高的重量功率比适用于各种轻型旋翼机以及试验用轻型飞行器[11]图2.1 HIRTH 3203E 活塞式发动机2.2 发动机控制系统的需求分析发动机控制系统的主要任务是[12]在飞行器飞行包线范围内按给定的规律向发动机主燃烧室和加力燃烧室供给燃油并自动调节油门量在开环控制时能保持给定的油门量使发动机工作在稳定状态在转速闭环控制时能按照给定的控制规律保证发动机转速平稳地从一个工作状态过渡到另一个工作状态从以上任务出发总的来讲发动机控制系统的要求包括功能和性能的要求可靠性要求和可维护性要求等其中发动机控制系统的功能要求应为基本要求它规定了数字控制系统必须完成的控制功能性能要求是控制系统是否合格的具体衡量指标如状态切换时转速曲线是否能实现平滑稳定的过渡被控对象是否能对控制系统的指令反应及时等等可靠性要求是指系统及组成系统的元件和部件的功能在规定时间内工作且达到规定的稳定程度任何一南京航空航天大学硕士学位论文7个系统如果不具有可靠性或可靠性很差都是不能使用的可维护性要求对数字控制系统来讲也是一个重要方面它要求数字控制系统在使用时必须便于检查返修时便于分解便于对有故障或老化零部件的更换重新安装与调试等本文从工程应用的角度重点考虑发动机控制系统的功能和性能要求以及可靠性要求其功能要求主要有以下几个方面1具有上电初始化的功能系统上电后对数字控制系统进行运行前自检测数据变量初始化以及设置发动机控制状态标志等2具有对发动机稳态控制的功能该项为基本控制功能要求数字控制系统在满足发动机性能要求的基础上自动地控制发动机的稳定工作态状其中主要是对油门阀的控制3具有对发动机过渡状态控制的功能即保证发动机在不喘振不超温不超转不停车条件下自动平稳快速地执行加速或减速等4具有对发动机的安全保护功能主要为重要参数上下界限制的保护功能和紧急情况的停车功能等5具有对发动机工作状态的实时监控功能发动机的工作过程中传感器会报出各种监控数据需要由地面站将这些数据采集存储并实时显示供调试人员现场监测和事后分析其性能要求主要有发动机油门阀对控制量的变化要响应迅速开/闭环控制的切换过程和闭环控制时工作状态的切换过程中转速过渡要平滑稳定发动机工作转速曲线要能迅速跟踪预期的转速设置量曲线并保持较小的稳态误差或是克服稳态误差等其可靠性要求主要是发动机控制系统的实时性和稳定性要求系统的软硬件结构合理选择的硬件工作稳定功能齐全扩展性好并具有良好的抗干扰性设计的软件运行稳定功能完整操作简单并应当具有较好的可移植性等2.3 发动机控制系统的组成无人飞行器发动机控制系统可由发动机控制器传感器测量机构无线通信设备以及地面站组成其示意图见图 2.2无人飞行器发动机控制系统设计与实现8图2.2 发动机控制系统示意图由于发动机控制与飞行控制综合在一起而且随着计算机技术的不断发展现阶段嵌入式计算机的运算能力足够强大所以发动机控制器可由飞控计算机实现发动机控制器是发动机控制系统的“大脑”主要完成信号采集控制算法运算和控制信号输出等任务地面站由工业控制计算机实现主要完成控制信号的输入测量数据的实时监控和存储由于该课题属于项目研究的初级阶段需要进行各种参数的调试和整定以及研究方案的验证和修改所以地面站的作用非常重要传感器测量机构由各种传感器以及单片机等设备组成主要用于发动机转速油门开度和温度等参数的实时测量无线通信设备主要用于飞控计算机与地面站之间数据的无线传输2.4 发动机控制系统的结构航空发动机控制系统按其结构可分为数字式和模拟式随着数字电子技术的发展和普及数字式控制系统已经基本取代了模拟式控制系统数字式控制系统可由数字控制器地面站和传感器测量机构等组成其中数字控制器是控制系统的核心部分有监督控制和全权限控制两种形式[13]本课题所研究的内容处于整套飞行控制系统开发的初级阶段对于发动机的控制还离不开试验人员的现场调试和监控因此设计出的数字控制器属于监督控制方式但最终目南京航空航天大学硕士学位论文9标是发动机的全权限自主控制根据发动机控制系统的功能和性能要求设计出控制系统的结构原理框图见图 2.3由外部输入控制器测量机构和油门舵回路构成图2.3 发动机控制系统原理结构图2.4.1 外部输入外部输入为发送到控制器中的控制信号量主要由命令值大气压力大气温度转速设定值和飞行器旋翼总距等参数组成命令值为开环控制时地面操纵人员向发动机控制器发出的手动油门信号量大气压力P 和大气温度T 均由传感器测量得到并输入到控制器中提供给控制律计算使用操纵人员可根据实际需要向控制器给定转速设定值Ωs 或者飞行控制模块计算出需要的转速信号量后将其发送到控制器中作为无人飞行器的发动机飞行器旋翼总距与发动机负载有很大联系闭环控制时发动机负载的变化会对其转速产生一定影响因此还需将总距联动量φ作为一信号量发送给控制器 2.4.2 控制器正如前面所说控制器是控制系统的“大脑”其性能的优劣起到至关重要的无人飞行器发动机控制系统设计与实现10作用PID 控制结构简单鲁棒性强容易实现且技术成熟在控制领域中应用非常广泛顾控制器的设计以PID 控制为主[14]PID 控制器是一种线性控制器对应常系数线性微分方程 它根据给定值r (t )与实际输出值c (t )构成控制偏差)()()(t c t r t e −= (2.1)控制规律为∫++=tdi P dtt de K dt t e K t e K t u 0)()()()( (2.2) 传递函数形式为 s K sK K s E s U s G d i P ++==)()()( (2.3)图2.4 PID 控制原理框图PID 控制器中各项的作用比例控制项及时成比例地反映控制系统的偏差信号e (t )偏差一旦产生控制器立即产生控制作用以减少偏差积分控制项主要用于消除静差提高系统的无差度积分作用的强弱取决于积分时间常数K i K i 越小积分作用越弱反之则越强微分控制项能反映偏差信号的变化趋势变化速率并能在偏差信号值变得太大之前在系统中引入一个有效的早期修正信号从而加快系统的动作速度减小调节时间和超调量图2.3中开关K 实现控制方式的切换位置1为开环控制方式地面站输入的油门信号量经比例系数p 1处理后直接控制油门舵回路位置2为转速闭环控制油门控制量经过控制律计算后得到在控制律计算中引入大气压力大气温度和总距联动量对转速误差控制律计算进行补偿与转速设定量PID 控制。
打药无人机设计原理和设计方案
打药无人机设计原理和设计方案
打药无人机是一种用于农田农作物防治病虫害的无人机设备。
下面是一些打药无人机设计原理和设计方案的要点:
1. 稳定性和机动性:打药无人机需要具备稳定的飞行特性,以便精确投放农药。
同时,它应该具有较高的机动性能,能够适应不同的作业环境和航线要求。
2. 药液喷雾系统:打药无人机需要配备高效的药液喷雾系统,确保药液均匀喷雾到作物上。
这包括喷头设计、药液泵、流量控制系统等。
3. 智能化控制系统:打药无人机的控制系统应该具备智能化能力,能够根据农田的实际情况自动调整喷洒策略和航线规划。
这通常需要搭载传感器、GPS、图像处理等技术。
4. 能源系统:无人机需要配备高效可靠的能源系统,例如电池或燃油发动机,并具备较长的续航能力,以满足连续作业的需求。
5. 防护措施:为了保护周围环境和人员安全,设计中应考虑防护措施,如撞击保护结构、紧急停机装置等。
设计方案常常由无人机结构设计、飞行控制系统设计、喷洒系统设计、动力系统设计等部分组成。
需要根据具体的应用需求和环境条件进行综合考虑和设计。
无人机动力系统设计与优化研究

无人机动力系统设计与优化研究无人机(Unmanned Aerial Vehicle, UAV)作为一种具有多种应用潜力的飞行器,其动力系统设计与优化研究是其性能提升和应用扩展的关键。
本文将从无人机动力系统的设计原理、优化方法以及未来发展方向等方面展开讨论。
一、无人机动力系统设计原理无人机的动力系统一般由发动机、推进系统和能源供应系统三部分组成。
其中,发动机负责产生推力,推进系统用以转化推力,能源供应系统则提供所需能源。
1. 发动机选择在无人机设计中,发动机的选择至关重要。
常见的无人机发动机有内燃发动机、电动发动机和气动发动机等。
不同种类的发动机有着不同的特点和适用场景,需要根据无人机的任务需求和性能要求来选择合适的发动机。
例如,对于需要长时间飞行的无人机,电动发动机一般较为适用,而对于需求高速飞行的无人机,则常采用内燃发动机。
2. 推进系统设计推进系统的设计目标是将发动机产生的推力有效地传递给无人机,以实现飞行。
常见的推进系统包括直接推进、螺旋桨推进和喷气推进等。
对于小型无人机来说,螺旋桨推进是较为常见和适用的设计方案。
在设计过程中,需要考虑推进效率、推力调节能力以及对无人机外形的影响等因素。
3. 能源供应系统优化能源供应系统的优化设计能够提高无人机的续航时间和飞行灵活性。
优化方案可以包括能源储存系统的选择、能量转化效率的提升以及能量管理系统的设计等。
例如,采用高能量密度的电池或燃料电池可以提高能源贮存效率;利用能量回收技术则可以在飞行过程中减少能量消耗。
二、无人机动力系统优化方法无人机动力系统的优化方法多种多样,其中包括性能优化、可靠性优化和经济性优化等方面。
下面将介绍一些常用的优化方法。
1. 性能优化性能优化旨在提高无人机的性能指标,例如航程、负载能力和飞行速度等。
常见的性能优化方法包括参数调整、设计参数优化和结构优化等。
例如,通过调整发动机的参数,如进气量和燃油供应量等,来提高发动机燃烧效率和推力输出效率。
无人机动力系统的创新设计

无人机动力系统的创新设计在当今科技飞速发展的时代,无人机已经成为了众多领域中不可或缺的工具。
从军事侦察到民用航拍,从物流配送再到农业植保,无人机的应用范围不断扩大。
而在无人机的众多组成部分中,动力系统无疑是最为关键的核心之一。
一个优秀的动力系统不仅能够为无人机提供强大的动力支持,还能够决定其飞行性能、续航能力以及可靠性。
因此,对无人机动力系统的创新设计一直是相关领域研究的重点和热点。
无人机动力系统主要包括电机、螺旋桨、电池和电调等组件。
传统的无人机动力系统在一定程度上满足了基本的飞行需求,但随着应用场景的不断拓展和用户对性能要求的日益提高,现有的动力系统逐渐暴露出一些不足之处。
例如,续航时间短、动力输出不稳定、重量较大等问题,限制了无人机在一些特定领域的应用。
为了解决这些问题,研究人员和工程师们在无人机动力系统的各个方面展开了创新设计。
在电机方面,无刷电机由于其高效、低噪、长寿命等优点,已经成为了无人机的主流选择。
然而,对于一些对功率密度和效率要求极高的应用场景,如长航时无人机和重载无人机,传统的无刷电机仍然存在改进的空间。
目前,一些新型的电机技术,如超导电机和轴向磁通电机,正在被研究和尝试应用于无人机领域。
超导电机利用超导材料在低温下零电阻的特性,可以大大提高电机的效率和功率密度;轴向磁通电机则通过改变磁场的分布方式,减小了电机的体积和重量,同时提高了输出功率。
螺旋桨作为将电机的旋转动力转化为推力的关键部件,其设计也对无人机的性能有着重要影响。
传统的螺旋桨设计通常基于经验和简化的理论模型,在效率和噪声方面存在一定的局限性。
近年来,随着计算流体力学(CFD)技术的发展,工程师们可以更加精确地模拟螺旋桨在不同工况下的流场特性,从而实现更加优化的设计。
此外,一些新型的螺旋桨材料,如碳纤维复合材料,具有更高的强度和刚度,可以减轻重量并提高螺旋桨的性能。
电池技术一直是制约无人机续航能力的关键因素之一。
目前,锂离子电池仍然是无人机最常用的电源,但随着技术的不断进步,新型电池技术如锂硫电池、固态电池等也在逐渐崭露头角。
多功能无人机的动力系统设计
多功能无人机的动力系统设计在当今科技迅速发展的时代,无人机的应用领域日益广泛,从航拍、物流配送、农业植保到环境监测、应急救援等,都能看到无人机活跃的身影。
而无人机能够实现如此多样化的功能,其动力系统的设计起着至关重要的作用。
动力系统是无人机的核心组成部分,它决定了无人机的飞行性能、续航能力、负载能力以及适应不同环境的能力。
一个优秀的动力系统不仅要能够提供足够的动力,还要具备高效、稳定、可靠和节能等特点。
在设计多功能无人机的动力系统时,首先要考虑的是动力源的选择。
目前,常见的动力源主要有电池、燃油发动机和混合动力系统。
电池动力是当前小型无人机中最为常见的选择。
锂电池具有能量密度较高、重量轻、充电方便等优点。
然而,其续航能力相对有限,特别是在承载较大负载或进行长时间飞行任务时,往往难以满足需求。
燃油发动机则在续航能力方面具有明显优势,能够为无人机提供更长时间的动力支持。
但燃油发动机通常较重,且噪音较大,维护成本也相对较高。
混合动力系统结合了电池和燃油发动机的优点,在一定程度上弥补了两者的不足。
通过合理的控制策略,可以根据不同的飞行任务和环境条件,灵活切换动力源,以达到最佳的性能表现。
在确定了动力源之后,电机的选择也是至关重要的。
电机的类型、功率、转速和扭矩等参数都会直接影响无人机的飞行性能。
无刷直流电机因其效率高、寿命长、调速性能好等优点,在无人机领域得到了广泛应用。
根据无人机的具体需求,可以选择不同规格的无刷直流电机。
例如,对于需要快速响应和高机动性的无人机,可以选择高转速、高扭矩的电机;而对于注重续航能力和稳定性的无人机,则可以选择效率更高、能耗更低的电机。
螺旋桨作为将电机的动力转化为升力的关键部件,其设计也不容忽视。
螺旋桨的尺寸、形状、桨叶数量和螺距等因素都会影响其性能。
一般来说,大尺寸的螺旋桨在低速旋转时能够产生较大的升力,但会增加空气阻力,降低飞行速度;小尺寸的螺旋桨则相反。
桨叶数量的增加可以提高螺旋桨的稳定性和效率,但同时也会增加重量和阻力。
无人机电动系统的设计与优化

无人机电动系统的设计与优化随着科技的飞速发展,无人机在各个领域的应用日益广泛,从航拍、农业植保到物流配送、环境监测等。
而无人机电动系统作为其核心组成部分,直接影响着无人机的性能、续航能力和可靠性。
一个精心设计和优化的电动系统对于提升无人机的整体表现至关重要。
一、无人机电动系统的组成无人机电动系统主要由电池、电机、电调(电子调速器)和螺旋桨四个部分组成。
电池是无人机的能量来源,其性能直接决定了无人机的续航时间。
目前,常用的无人机电池有锂聚合物电池(LiPo)和锂离子电池(Liion)。
LiPo 电池具有较高的能量密度和放电能力,但安全性相对较低;Liion 电池则在安全性和循环寿命方面表现较好,但能量密度和放电能力略逊一筹。
电机则负责将电能转化为机械能,驱动螺旋桨旋转,从而产生升力和推力。
无人机电机主要有有刷电机和无刷电机两种。
无刷电机由于效率高、寿命长、功率密度大等优点,已成为无人机的主流选择。
电调的作用是控制电机的转速和转向,实现对无人机飞行姿态的精确控制。
它接收飞控系统的指令,并根据电池电压和电机负载情况,调整输出电流和电压,确保电机稳定运行。
螺旋桨则是将电机的旋转动力转化为空气动力,为无人机提供升力和推力。
螺旋桨的尺寸、形状和桨叶数量等参数都会影响其性能。
二、设计考虑因素在设计无人机电动系统时,需要综合考虑多个因素,以满足不同应用场景的需求。
1、负载需求首先要明确无人机的负载,包括机身重量、搭载的设备重量等。
根据负载情况,计算出所需的升力和推力,从而确定电机和螺旋桨的规格。
2、飞行性能不同的应用场景对无人机的飞行性能有不同的要求。
例如,航拍无人机需要平稳的飞行和精确的悬停能力,而竞速无人机则追求高速和敏捷的飞行性能。
这就需要在电机转速、扭矩、螺旋桨效率等方面进行优化。
3、续航能力续航时间是无人机的一个重要指标。
为了延长续航时间,可以选择高能量密度的电池,优化电机和电调的效率,降低系统的整体功耗。
无人机电动推进系统的设计研究
无人机电动推进系统的设计研究随着科技的飞速发展,无人机在各个领域的应用越来越广泛,从航拍、农业植保到物流配送、环境监测等。
而无人机的性能很大程度上取决于其推进系统的设计。
电动推进系统作为一种清洁、高效且相对安静的动力解决方案,在无人机领域备受关注。
一、无人机电动推进系统的组成无人机电动推进系统主要由电机、电子调速器(ESC)、螺旋桨、电池和电源管理系统等部分组成。
电机是整个系统的核心动力源,其性能直接影响无人机的飞行能力。
常见的电机类型包括无刷电机和有刷电机,无刷电机因其效率高、寿命长等优点,在无人机中应用更为广泛。
电子调速器负责控制电机的转速和功率输出,根据飞控系统的指令精确调节电机的运行状态,以实现无人机的各种飞行动作。
螺旋桨将电机的旋转动力转化为向前的推力,其形状、尺寸和桨叶数量等参数都会对推进效率产生影响。
电池为整个系统提供能量,目前常用的电池类型有锂电池,其具有高能量密度和相对较轻的重量。
电源管理系统则用于监控电池的状态,如电压、电流和剩余电量等,确保电池的安全和高效使用。
二、电机的选择与设计在选择电机时,需要考虑多个因素。
首先是电机的功率和扭矩,这取决于无人机的重量、预期飞行速度和负载能力。
一般来说,较重的无人机需要功率更大的电机来提供足够的推力。
电机的转速范围也很重要。
不同的飞行任务可能需要不同的转速特性。
例如,对于需要快速加速和高速飞行的无人机,应选择高转速电机;而对于需要稳定悬停和精确控制的无人机,中低转速且扭矩较大的电机可能更合适。
此外,电机的尺寸和重量也会影响无人机的整体布局和飞行性能。
较小较轻的电机有助于减轻无人机的重量,但可能在功率和扭矩方面有所限制。
在电机的设计方面,要优化电机的磁场结构、绕组方式和散热性能。
良好的磁场设计可以提高电机的效率和功率密度;合理的绕组方式能够降低电阻损耗;而有效的散热设计则能保证电机在长时间运行时不会过热,从而保持稳定的性能。
三、螺旋桨的设计与优化螺旋桨的设计直接关系到推进系统的效率和性能。
无人机动力系统优化设计与分析

无人机动力系统优化设计与分析随着科技的飞速发展,无人机在各个领域的应用越来越广泛,从航拍、农业植保到物流配送、军事侦察等,其作用日益凸显。
而无人机动力系统作为其核心组成部分,直接影响着无人机的性能、续航能力、飞行稳定性等关键指标。
因此,对无人机动力系统进行优化设计与分析具有重要的意义。
无人机动力系统主要由动力源、传动系统、推进系统等部分组成。
动力源通常包括电池、燃油发动机或电动马达等;传动系统负责将动力源产生的动力传递到推进系统;推进系统则通过螺旋桨或喷气式发动机等产生推力,使无人机能够在空中飞行。
在优化设计无人机动力系统时,首先需要考虑的是动力源的选择。
电池作为一种常见的动力源,具有无污染、静音等优点,但续航能力相对有限。
燃油发动机则具有较高的能量密度,续航能力较强,但存在噪音大、污染环境等问题。
电动马达在近年来发展迅速,其效率不断提高,且易于控制。
在实际应用中,需要根据无人机的任务需求、飞行时间、负载能力等因素综合考虑选择合适的动力源。
例如,对于需要长时间飞行的航拍无人机,可能更倾向于选择燃油发动机;而对于短距离、轻负载的消费级无人机,电池驱动的电动马达则更为合适。
此外,随着新能源技术的发展,氢燃料电池等新型动力源也逐渐受到关注,其具有高能量密度、无污染等优点,但目前仍存在成本高、技术不成熟等问题。
传动系统的设计也对无人机动力系统的性能有着重要影响。
合理的传动系统设计可以提高动力传递效率,减少能量损失。
常见的传动方式包括齿轮传动、皮带传动和直接驱动等。
齿轮传动具有传动精度高、承载能力强的优点,但结构复杂、重量较大;皮带传动则相对简单、轻便,但传动效率略低;直接驱动则可以避免传动过程中的能量损失,但对电机的性能要求较高。
在实际设计中,需要根据无人机的具体要求选择合适的传动方式,并通过优化传动比、减小传动部件的摩擦等措施提高传动效率。
推进系统的设计直接关系到无人机的飞行性能。
螺旋桨是无人机最常用的推进装置之一,其设计参数如桨叶数量、桨叶形状、直径、螺距等都会影响推力的大小和效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人机发动机电喷系统设计方案
一、无人机发动机特性及其工况特点
1、无人机发动机特点
无人机发动机属于航空动力的一种,无论是活塞式发动机还是涡轮喷气发动机,都
有比较紧凑的构造,较小的体积尺寸和较轻的自身重量不仅使发动机在使用中安装
方便,更重要的是在航空动力应用中减轻了起飞负担。
常见的活塞式发动机一般为
二冲程发动机居多,相对于四冲程发动机而言具备更大的功率和转速输出。
这些小
体积发动机以单缸、双缸、或四缸型式用于无人机或者航模等轻型飞行装置中,体
积紧凑、重量轻盈,在行业中比较知名的有3W、DA、DLE等多个品牌多种型号发
动机供选择。
2、无人机发动机运行工况分析
无人机发动机自身具备体积小重量轻特点,匹配不同的螺旋桨会有不同的动力输出。
航空飞行不同于地面运转,发动机在空中需要应对的工况比地面要负责更多,不仅
仅要考虑本身的机身重量,还需要考虑空中气流对机身的影响、海拔高度变化造成
空气密度变化对发动机影响,以及温度变化、潮湿度变换等影响。
无人机性能发挥关键在于发动机性能,功率、油耗、海波高度适应能力、续航时间
等都是无人机发动机实际应用中制约因素。
二、无人机发动机电喷匹配要点
考虑到无人机及其发动机本身特性及其应用工况需要,匹配无人机发动机电喷系统需要注重以下几个方面
●零部件体积小、重量轻、可靠度高、便于安装
●满足高海拔飞行需要,具备海拔高度数据修正功能
●延长续航时间
●改善动力特性,提升功率
●降低油耗,提高燃油经济性
三、3W56无人机发动机电喷设计方案解析
石家庄益科创新科技有限公司基于3W56发动机设计匹配的电喷方案,对于航模无人机发动机等小型发动机电喷化改装非常合理,无论是零部件设计还是控制策略等各个方面,均符合无人机发动机特点及其工况使用需要。
1、ECU设计方案
石家庄益科创新科技有限公司无人机ECU实物照片如下:
外形尺寸:65mm*78mm*20mm
重量:≤120g
外壳材质:轻铝合金
符合体积小重量轻的要求。
如下图为石家庄益科创新科技有限公司航模无人机电喷系统UAVECU设计示意图,在该示意图中我们可以看到该型号ECU具备全部需要的功能以及可能的扩展功能。
UAV ECU设计特点:
1)、支持海拔高度修正功能,这是对于无人机发动机非常重要的功能,BARO sensor,即为大气压力传感器,ECU采集BARO传感器信号反馈的环境压力信息,通过计算得出当前发动机所在环境海拔高度及对应的空气密度,从而对喷油和点火信号进行调整,使其符合当前发动机公款运转需要,避免因为喷油和点火不合理问题造成发动机损坏或者功率突变造成事故。
2)、支持舵机控制功能,ECU具备SERVO motor舵机控制输出端口,可以根据发动机运行状态需要或者接收控制信号来控制舵机旋转角度,从而控制节气门阀体阀片开度,调整发动机充气效率,改变发动机功率输出状态。
3)、支持温度传感器、节气门位置传感器、相位传感器、等多个传感器信号采集。
4)、支持喷油相位和脉宽控制,最大可同时驱动双路喷油器;同时支持点火正时控制,并且可以通过爆震传感器实现点火闭环控制,这在重油电喷系统中非常重要。
5)、支持多种油泵系统方案。
6)、支持多种通讯协议,包括SCI和CAN总线,便于系统集成,同时具备数据广播功能。
2、节气门阀体总成设计方案
节气门阀体设计时需要考虑发动机排量和充气效率需要。
对比原机化油器而言,要
具备更高的充气效率和更大进气道截面,这样可以保证电喷系统可以是发动机发挥
更大的功率输出。
原机化油器进气道最狭窄处直径为接近16mm,考虑更好的进气
效果,节气门设计18mm阀片直径,节气门也不是越大越好,需要考虑发动机实际
需要。
如下图所示,益科公司设计的匹配3W56发动攻击的节气门阀体,该设计高度集成
节气门阀体、节气门位置传感器、舵机、喷油器等多个部件为一体,充分考虑安装
空间需要和便捷安装等因素,完全替代原有化油器,原机不需要做任何的改动真正做到了即插即用。
节气门阀体设计特点:
1)、高度集成,体积最小化,重量最轻化,完全替换原机化油器,即插即用。
2)、喷油器的喷射角度尽量做到最优,保证油气雾化效果最佳。
3)、舵机采用高性能可靠的小型FUTABA舵机,保证控制精确,性能稳定。
3、供油油泵匹配方案
油泵是电喷系统中体积较大、重量较重的部件,为了满足无人机电喷系统体积小重量轻的需要,石家庄益科创新科技有限公司采用Gear pump齿轮泵为无人机电喷系统供油,齿轮泵具备体积小重量轻的特点,ECU输出PWM控制齿轮泵运转,同时结合油压传感器使用,油压传感器反馈油压状态给ECU,ECU可以实时调整PWM输出占空比来保证齿轮泵输出油压稳定。
3、点火系统匹配方案
电喷系统需要ECU控制点火相位,因此石家庄益科创新科技有限公司针对性的设计了可以支持双缸的无进角航模无人机发动机专用CDI点火器,替换原机点火器,相对于原机点火器,益科创新公司匹配的CDI点火器增大了点火线圈,提高点火能量,可以确保发动机具有更好的点火效果,燃烧状态更佳,提高功率输出性能。
4、传感器匹配方案
电喷系统必须的传感器在无人机电喷系统中均有匹配。
其中包括进气温度传感器
IAT,缸头温度传感器ECT,节气门位置传感器TPS,进气压力传感器MAP,触发信号传感器HALL sensor,以及航空动力海拔修正功能必须的大气压力传感器BARO sensor。
5、线束及其他
无人机电喷系统运行工况相对复杂,低于电喷系统的干扰因素也较多,为了保证电喷系统性能,信号稳定屏蔽干扰,益科创新有限公司采用高温屏蔽线作为无人机电喷系统的线束原材料,利用高温屏蔽线耐高温、刚干扰等特性为电喷系统稳定运行提供保障。
同时线束和ECU的接插件采用的是高性能的航空行业专用接插件,保证电气连接性能。
四、电喷系统及化油器特性曲线对比
1、功率特性对比
2、油耗特性对比。