三菱伺服电机推荐万能的伺服电机编码器调零的方法)
伺服电机编码器调零原理
伺服电机编码器调零原理伺服电机编码器调零是在使用伺服系统时非常重要的一个步骤,它能够确保伺服电机在运行中的准确定位和运动控制。
编码器是伺服电机的重要组成部分,用于反馈电机转动的角度和速度信息。
调零过程就是让编码器信号与实际位置一致,从而实现准确的控制。
编码器的作用编码器是一种传感器,能够将机械运动转换成电信号。
在伺服系统中,编码器主要用于反馈电机的实时位置和速度信息,以便系统控制器根据需求进行精确的控制。
编码器通常分为绝对式编码器和增量式编码器两种类型,它们在伺服系统中的应用略有不同。
编码器调零的原理在进行伺服电机编码器调零时,需要确保电机处于静止状态。
调零的过程是通过设置一个参考点(零点),使编码器的信号与该零点对应的位置一致。
具体的步骤如下:1.停止电机运动:首先确保电机处于停止状态,可以通过控制器进行停机操作。
2.找到参考点:确定一个位置作为编码器的零点,通常选择电机的某个固定位置作为参考点。
这个过程需要精确测量,确保选定的点符合实际需要。
3.设置零点:将编码器的当前位置清零,并校准为设定的参考点位置,确保编码器信号与实际位置一致。
4.确认调零:再次检查编码器的位置是否正确,确认调零成功。
调零的重要性良好的编码器调零是伺服系统正常运行的基础,只有在准确调零的情况下,系统才能准确控制电机的位置和速度。
如果编码器未正确调零,可能导致电机位置偏差,影响系统的运行精度,甚至引起不可预料的故障。
总结伺服电机编码器调零是确保伺服系统正常运行的重要步骤。
通过逐步设置零点,校准编码器位置,可以确保系统精确控制电机的位置和速度,提高系统运行的稳定性和精度。
在实际应用中,操作人员应该严格按照操作流程进行调零操作,确保系统能够正常运行。
三菱MR-E伺服调试说明

MITSUBISHI三菱MR-E数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 三菱MR-E连接示意图 2. 通电前的检查 3. 通电时的检查 4. 三菱MR-E伺服驱动器的参数设定方法 5. 三菱MR-E伺服驱动器的参数表 6. 三菱MR-E伺服驱动器的参数和性能优化调整 1.三菱MR-E连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在三菱的保修范围!) 2. 通电前的检查 1) 确认三菱MR-E伺服驱动器和电机插头的连接,相序是否正确: A. 中惯量电机HC-SFE 52(0.5KW)~152(1.5KW)的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 刹车电源 B1 G 刹车电源 B2 H B. 中惯量电机HC-SFE 202(2.0KW)的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 刹车电源 B1 E 刹车电源 B2 F 注: 电机相序错误,通电时会发生电机抖动现象。
刹车电源 B1、B2无极性。
2)确认三菱MR-E伺服驱动器CN2和伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认三菱MR-E伺服驱动器CN1和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认接地可靠。
4.三菱MR-E伺服驱动器的参数设定方法 三菱MR-E伺服驱动器修改参数的操作方法,如下: 1) 按“MODE”按钮,可切换显示以下6种方式, 2 切换到显示基本参数画面: 2) 按○·UP和○· DOWN键,选择想修改参数的参数号(例修改2号参3) 按2次○·SET键(想修改参数的参数值显示并闪烁)。
交流伺服电机编码器调零方法

交流伺服电机编码器调零方法有以下几种:
1. 用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U 入V出,将电机轴定向至一个平衡位置。
2. 用示波器观察绝对编码器的最高技术位电平信号。
3. 调整编码器转轴与电机轴的相对位置。
4. 一边调整,一边观察最高计数位信号的跳变沿,直到跳变沿准确出现在电机轴的定向平衡位置处,锁定编码器与电机的相对位置关系。
5. 来回扭转编码器电机轴,撒手后,若电机轴每次自由恢复到平衡位置时,跳变沿都能准确复现,则调零有效。
这些步骤完成后就能对交流伺服电机编码器进行调零了。
伺服电机编码器调零对位方法

本信息来源于网络,不代表本站观点
如若转载请注明来源:中国自动化网
通过上述调整,你会发现增量式伺服电机其实有一个较宽的可调区域,而这个区域里的中间位置就是伺服电机最大力矩输出点,如果一个电机力矩不足或正反方向运行时有一个方向上力矩不足往往是因为编码器的Z信号削弱或该位置偏离中心所致,即零位发生了偏离,一般重新调整该零位即可.
对于一个新的编码器来说这个静止区域相对较小,如大幅增加则是编码器内部电路出了问题,表现为力矩不足或发热大幅增加.用电流表测量则空载电流明显增加.
伺服电机编码器调零对位方法
2013-1-9 10:24:00 来源:
[闭][打印]
一台AB伺服电机(MPL-B640F-MJ24AA),拆开检查刹车时由于客户无知,连装在电机尾部固定的编码器也拆了下来(没做标记),编码器是sick的SRM50-HFA0-K01。装上后刹车没问题,但出现飞车故障。伺服驱动器报错E18OVERSPEED或者E24velocityerror。
找到中心位置后并把这个位置擦干净,只要把编码器底座用502胶直接固定于电机侧面对应处即可.待502干了后再在上机涂上一层在硅橡胶即可投入正常运行.实践证明,正常情况下这样处理后的伺服电机使用一年是没有问题的,
从上面的调整可以看出,由于编码器的轴与电机轴心是可以随便以任一角度连接的,所以编码器零位与电机的机械位置只是相对位置而已,只有编码器的轴与电机轴固定了,那么编码器的实际零位位置也便固定下来了,如果活动底座位置确定了,那么轴间的柱头镙钉的位置也便固定了.
1、是电机高速反转,这是由于编码器与实际零位相差太大所致,不必惊慌,你可以把编码器转过一个角度直到电机能静止下来为止.、是电机在零速指令下处于静止状态,这时你可以小心地先反时针转动编码器,注意:一定要慢,直到电机开始高速反转,记下该位置同时立即往回调至静止区域.这里要求两手同时操作,一手作旋转,另一手拿好记号笔,记住动作一定要快,也不可慌乱失措,完全没必要,这是正常现象.然后按顺时针继续缓慢转动直到又一次高速反转的出现,记下该位置并立即往回调至静止区,
三菱伺服马达调机步骤概要

三菱伺服馬達調機步驟本文以 Mitsubishi 泛用型 AC servo motor 為安裝對象 , 介紹安裝及調整步驟。
1. 安裝圖 1 馬達安裝接線圖馬達與 Driver 接線圖如圖 1所示 , 安裝與調機時接線請參照此接線圖,第一次啟動馬達運轉時,請確認連接是否正確。
2. 信號與配線在位置控制模式下, Driver 標準接線圖如圖 2所示。
根據 Driver 與控制器連轉接板接線表需按表 1連接,以確保控制命令與回受訊號能正確的送出與接收。
圖 2 Driver控制訊號線接線圖表 1接線腳位列表3. 參數介紹Mitsubishi 泛用型 AC servo motor可設定之參數大致可分為三個部份,分別是基本參數、擴張參數Ⅰ、擴張參數Ⅱ:3.1. 基本參數基本參數共有 20個,其內容如表 2所示。
表 2 基本參數3.2. 擴張參數Ⅰ擴張參數Ⅰ共有 30個,其內容如表 3所示。
表 3 擴張參數Ⅰ3.3. 擴張參數Ⅱ擴張參數Ⅱ共有 27個,其內容如表 4所示。
表 4 擴張參數4. 基本運轉操作目前完成了安裝與線路連接 , 若要啟動馬達使其試運轉則還有一些基本參數待設定,根據下列順序一一調整至適應值。
A. 參數 19:首先需將所有參數設定在可讀寫之狀態下,將參數 19設定為 (000E,如此便可對所有參數進行修改。
B. 參數 0:在位置控制模式下,視回生電阻使用狀況 (通常不使用 , 參數 0建議設定為 (0000。
C. 參數 1:機能選擇參數,一般使用增量系統,無剎車訊號時,使用初始設定值(0002。
D. 電子齒輪比:齒輪比設定使用參數 3(CMX及參數 4(CDV,一般計算如 (式1 、 (式2 所示,先決定機器之最小移動量,根據機構設計可求出每轉所需送出之pulse 數 1f (式 1 ,再搭配馬達之解析能力,利用 (式 2 可求得電子齒輪比。
電子齒輪比設定範圍為500501≤≤CDVCMX 。
(完整)三菱伺服实际调试设置实操

三菱制定位单元起动伺服电机(步进电机等)顺序书1.前期准备①最小限的参数设定基本参数根据控制对象进行选择.水平、垂直移动装置为mm、旋转装置为degree最佳。
1转的脉冲数输入伺服电机式样书中记载的编码器、伺服电机每1转的分辨力。
1转的移动量根据机械构造,输入伺服电机转1转时装置的移动距离.因皮带轮的径以及钻孔螺丝端部的不同而不同,所以最好与机械设计担当者确认.根据需要进行选择。
如果是步进电机需要进行设定。
根据系统进行选择.零点信号有或无会产生结果不同,需要注意。
基本是負方向,因原点传感器的位置也有正方向的情况。
速度②根据机械构造需要重新设定的参数~31~3急停选择后的移动量设定③三菱伺服电机使用时需要设定的参数2.配线检查①原点传感器上确认原点信号的ON/OFF。
②上下限限制传感器上下限限制信号的ON/OFF。
3.电机旋转方向以及上下限限制传感器的方向确认①JOG运转中确认电机的旋转方向。
+JOG(离开原点传感器的方向)时,伺服电机的现在值增加吗?-JOG(接近原点传感器的方向)时,伺服电机的现在值减少吗?逆运转时,旋转方向的设定(Pr107orPr6)变更为相反的。
②上下限限位传感器方向确认上記①中,电机的旋转方向确认后,再度用+JOG起动伺服电机,如果用150mm标尺灯遮断上限限位传感器,确认伺服电机有没有停止.如果没有停止,再次确认上限限位传感器的配线以及方向性(需要确认上下限限位传感器是否反了。
)。
用同样方法确认下限限位传感器。
4.装置的可动范围的确认上記3.中的旋转方向以及上下限限位传感器的方向的确认作业如果完成了,JOG运转中移动装置至上下限限位传感器起动,确认装置的可动范围.5.原点复位①根据原点复位方式再确认必要的设定项目,特别要注意挡块停止方式时的原点复位扭矩限制值的设定,计数方式时得近点ドグON后的移动量设定要注意是否恰当。
②JOG运转中将装置移动至上下限限位传感器的正中位置,进行原点复位,如果装置移动至远离传感器的方向时,直接使装置停止,变更原点复位方向(Pr46)后,再度进行原点复位。
伺服电机回零不用怕,我教你三种方法

伺服电机回零不用怕,我教你三种方法回零是伺服控制的一个大课题。
系统对回零的要求各种各样,各厂家的运动控制器或驱动器支持的回零方式各不相同,且伺服电机也有多种反馈类型,由此衍生出多种回零方式。
另,各厂家对与回零相关的关键术语的描述也不尽相同,因此,有很多与伺服回零相关的话题和讨论。
实找零的方法有很多种,可根据所要求的精度及实际要求来选择。
可以伺服电机自身完成(有些品牌伺服电机有完整的回原点功能),也可通过上位机配合伺服完成,但回原点的原理基本上常见的有以下几种。
一、伺服电机寻找原点时,当碰到原点开关时,马上减速停止,以此点为原点。
这种回原点方法无论你是选择机械式的接近开关,还是光感应开关,回原点的精度都不高,就如一网友所说,受温度和电源波动等等的影响,信号的反应时间会每次有差别,再加上从回原点的高速突然减速停止过程,可以百分百地说,就算排除机械原因,每次回的原点差别在丝级以上。
二、回原点时直接寻找编码器的Z相信号,当有Z相信号时,马上减速停止。
这种回原方法一般只应用在旋转轴上,且回原速度不高,精度也不高。
三、此种回原方法是最精准的,主要应用在数控机床上:电机先以第一段高速去找原点开关,有原点开关信号时,电机马上以第二段速度寻找电机的Z相信号,第一个Z相信号一定是在原点档块上(所以你可以注意到,其实高档的数控机床及中心机的原点档块都是机械式而不会是感应式的,且其长度一定大于电机一圈转换为直线距离的长度)。
找到第一个Z相信号后,此时有两种方试,一种是档块前回原点,一种是档块后回原点(档块前回原点较安全,欧系多用,档块后回原点工作行程会较长,日系多用)。
以档块后回原为例,找到档块上第一个Z相信号后,电机会继续往同一方向转动寻找脱离档块后的第一个Z相信号。
一般这就算真正原点,但因为有时会出现此点正好在原点档块动作的中间状态,易发生误动作,且再加上其它工艺需求,可再设定一偏移量;此时,这点才是真正的机械原点。
伺服电机编码器的使用方法
伺服电机编码器的使用方法
伺服电机编码器的使用方法包括以下几步:
1. 确定编码器的类型和规格:伺服电机编码器有很多不同的类型和规格,如增量式编码器和绝对式编码器,分辨率等等。
要确定您使用的编码器的类型和规格。
2. 连接编码器:将编码器正确地连接到伺服电机上。
通常,编码器会有两个输出通道,一个是A相通道,一个是B相通道,还有一个Z相通道用于零点标定。
3. 配置伺服驱动器:进入伺服驱动器的配置界面或菜单,设置编码器参数。
这包括设置分辨率、编码器类型(增量式还是绝对式)、零点标定等。
4. 零点标定:进行零点标定以确定编码器的初始位置。
这可以通过驱动器菜单或使用专门的零点标定工具来完成。
5. 监测编码器反馈:使用编码器反馈信号来监测电机的位置和运动状态。
这可以通过读取驱动器的反馈信号或使用编码器输出的脉冲信号来实现。
6. 调整编码器参数:根据应用需求和实际情况,可能需要调整编码器的一些参数,如分辨率、速度限制等。
需要注意的是,不同的伺服电机和编码器可能具有不同的使用
方法和配置步骤。
建议参考伺服电机和编码器的相关说明手册或咨询厂家获得更详细的使用指导。
伺服电机编码器作用与调零
伺服电机编码器作用与调零伺服电机编码器通常由一个旋转的光电编码盘和一个固定的光电传感器组成。
编码盘上刻有一系列均匀分布的透明和不透明部分,而传感器则用来检测这些部分,并将其转化为电信号。
根据不同的编码方式,编码器可以分为绝对编码器和增量编码器两种类型。
对于绝对编码器,每个位置都有唯一的编码,因此它可以准确地提供电机转子的位置信息。
这种编码器通常会将编码信号转化为二进制码,并通过多个信号线传递给控制系统。
由于绝对编码器可以提供精确的位置信息,因此它在需要高精度控制的应用中得到广泛应用,如机床、机器人等。
而增量编码器则是根据电机转子的位置变化来产生脉冲信号,它只能提供电机转子与其中一参考位置之间的相对位置信息。
增量编码器通常会将转子位置变化转换为两路正交脉冲信号,一路为A相信号,另一路为B相信号。
通过检测这两路信号的电平变化,可以确定转子的转动方向以及转动的步长大小。
增量编码器相对于绝对编码器来说成本更低,并且速度响应更快,因此在速度控制方面具有较大的优势。
它被广泛应用于需要高速运动但不需要高精度位置控制的应用中,如印刷机械、包装机械等。
在使用伺服电机编码器前需要进行一次调零过程,即将电机转子的位置与控制系统中的零点进行对齐。
调零是为了确保控制系统能够准确地控制电机转子的位置,并根据需要进行反馈控制。
调零的过程大致步骤如下:1.确保电机系统处于待机状态,并且机械系统没有任何阻力。
2.启动控制系统,将电机驱动到一个已知的起始位置,如机械开关的位置。
3.将电机的位置信号与控制系统的零点进行校准,使其对齐。
4.记录下电机转子位置与控制系统零点的差距,这个差距即为调零偏差。
5.根据调零偏差进行补偿计算,以确保控制系统对电机位置的准确控制。
调零的目的是为了避免电机因无法确定起始位置而无法进行准确控制的问题,以及消除电机系统中可能存在的位置误差。
通过调零,可以提高电机系统的控制精度和性能,并实现更加稳定和准确的位置控制。
电机编码器调零步骤
电机编码器调零步骤展开全文电机中若具备电子铭牌功能,在应用中就可以直接使用,不需要需要调整编码器;如雷赛交流伺服电机具有电子铭牌功能,能自动识别电机型号,参数并对应匹配参数就能发挥伺服优异性能。
若不具备电子铭牌功能的电机,则需要调整编码器和电角度。
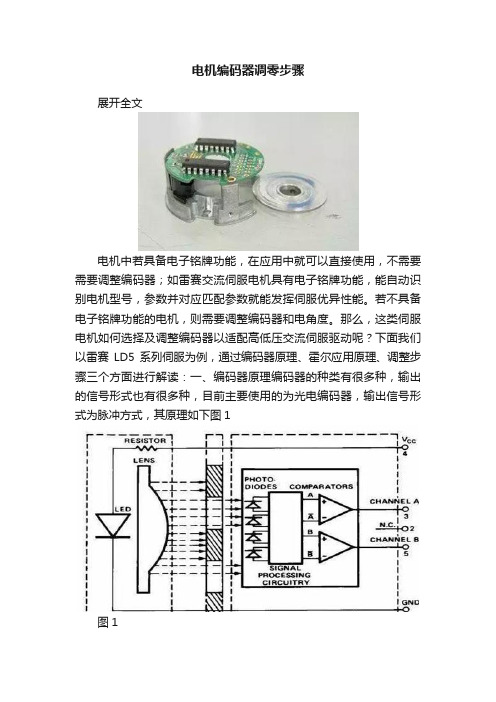
那么,这类伺服电机如何选择及调整编码器以适配高低压交流伺服驱动呢?下面我们以雷赛LD5系列伺服为例,通过编码器原理、霍尔应用原理、调整步骤三个方面进行解读:一、编码器原理编码器的种类有很多种,输出的信号形式也有很多种,目前主要使用的为光电编码器,输出信号形式为脉冲方式,其原理如下图1图1光电码盘安装在电机轴上,其上有环形通、暗的刻线。
通过LED 发射光源,多组光耦器件矩阵排列提升信号稳定性,并通过接受光源的强弱,内部进行比较输出A、B两路信号。
A、B信号相差90度相位差。
另外每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转。
为增加编码器信号长线传输的稳定性,A、B、Z信号输出时经差分输出以增加信号稳定性。
光电编码器的霍尔信号U、V、W其产生原理与A、B信号基本一致。
无刷或低压伺服也有通过磁环及霍尔元件来产生霍尔信号。
二、霍尔应用原理众所周知伺服电机相比其他电机具有很高的效率,其主要原因是伺服电机采用了矢量控制的原理。
简单来说,伺服电机主要由旋转的永磁体(转子)和三组均匀分布的线圈(定子)组成,线圈包围着定子被固定在外部。
电流流经线圈产生磁场,三组磁场相互叠加形成一个矢量磁场。
通过分别控制三组线圈上的电流大小,我们可以使定子产生任意方向和大小的磁场。
同时,通过定子和转子磁场之间的相互吸引和排斥,力矩便可自由地得到控制。
对于转子旋转的任意角度,定子都存在着一个最优化的磁场方向,能产生最大的力矩。
很显然如果定子产生的磁场方向正交于转子的磁场方向,这个位置就是产生最大力矩的位置。
固定线圈的空间电流矢量具有一个固定的磁场方向,这完全由通过线圈的磁通大小和流经线圈的电流相互作用决定的。
伺服电机编码器作用与调零
点题:伺服电机的编码器不仅有位置相关的功能;还有反馈电机转子的角度、转子的磁场角度的功能。
伺服控制器根据编码器反馈的转子信息在不同命令下更改定子旋转磁场的角度而使定子做出相应的动作。
当编码器反馈的相位有误时,即编码器不在零位,伺服就会出现控制失速、飞车、实际转速与设定转速不一致、转矩不足、电流过大等故障。
这时,就需要调零;使编码器与转子的相位一致。
编码器的作用;伺服编码器是工业机器人技术核心伺服电机的必配,对于伺服电机性能乃至机器人性能的作用极为关键。
不仅仅是工业机器人,伺服电机在自动化应用已越来越广泛。
随着工业机器人大热,而其中的伺服编码器也成为自动化行业关注的焦点之一。
工业编码器的市场大致可分为自动化加工应用类(FA)编码器、过程控制及记录类(PA)编码器、高精度测量类编码器、数字信息化应用类编码器、安全保护类编码器、内置仪表类编码器等等,其中在自动化加工应用类编码器中,又由于伺服电机的热度分出了电机反馈专用型编码器—伺服反馈编码器和矢量变频反馈编码器。
由于近年来伺服电机的迅猛发展和工业机器人热点,有关伺服编码器的话题很热,也颇有困惑与争议。
我在此伺服编码器简介系列的介绍中,与网友们共同探讨伺服编码器的各种特点与争论疑点。
伺服电机与变频电机根本的不同是必须配有编码器反馈,在每一个时刻的位置环、速度环和电流环的三闭环控制。
如下图:伺服反馈编码器对伺服电机的重要特性具有决定性的影响:1,定位精度2,速度稳定性3,带宽,它决定驱动指令的响应时间和抗干扰性能4,伺服刚性5,电机尺寸6, 功率损耗7,噪音与发热8,安全性其中特别是伺服编码器在输出信号特征上与普通编码器的不同:1,驱动换向信号组:伺服编码器(同步伺服电机)与普通编码器不同的第一个特点,是要提供启动电流换向的传感信号反馈。
在同步伺服电机的启动时,电极启动位置由编码器提供,对应每组UVW绕组的位置反馈,以确定电机绕线组线圈驱动电流相位。
当伺服控制需要加速、减速时,通过驱动电流相位的提前量与滞后量,控制电机的加速与减速转换,以达到对电机加速度正与反的控制。
三菱伺服电机调试步骤

三菱伺服电机调试步骤三菱伺服调试步骤:一.纯软件调试:调试环境:采用仿真器调试调试任务:检验软件的正确性1.总调:接上各种传感器,对编码器编相应的信号单片机程序模仿伺服电机工作时的编码器信号,然后按工作情况-启动,调速,停机等各个工作状态调试。
(1 )多任务的参数是否打架,这里要展开才能说清楚,请多体会(2)多任务系统各个任务占用DSP的时间,是否有任务在极端情况下时间不够。
(3)注意极端情况,边缘情况是是否工作正常。
2.子系统调试:(1 )判断边缘状态下工作是否出问题(2)走通每一条路,判断结果和预期是否一致(3 )注意是否存在计算溢出二.直流低电压,低电流下调试:调试环境:用直流电源加30V或60V直流电压;烧写芯片调试;采用示波器,功率仪等对硬件数据监测,最好有DSP-电脑调试系统,将DSP 工作情况,检测参数传给电脑,同时将电脑的工作或调试命令传给DSP 。
调试任务:主要检验软件和硬件之间协调性(1 )各个工作状态下硬件数据(如电压,电流,波形,功率等)是否正常(2 )判断各个关键点的干扰情况。
关键点一般是指:为DSP 供电的3.3V 电源;编码器信号接收端;通讯信号接收端;功率模块电源;功率模块驱动信号端;功率模块保护信号接收端等。
记下这些关键点的干扰情况,好与后面强电加上后的干扰比较。
三.交流低功率下调试:调试环境:加交流电源,低功率负载;烧写芯片调试;采用示波器,功率仪等对硬件数据监测,DSP- 电脑调试系统。
调试任务:检验交流及其有关电路。
四.交流高功率下调试:调试环境:加交流电源,高功率负载;烧写芯片调试;采用示波器,功率仪等对硬件数据监测,DSP- 电脑调试系统。
调试任务:检验最恶劣干扰下系统工作状态;检验整流桥,功率模块,滤波电容发热情况;检验电机发热情况。
( 1 )在大功率情况下,测试关键点干扰情况,和直流小功率情况作比较,找出问题。
2 )检验大功率情况系统的各个参数( 3 )检验功率器件的发热情况( 4 )检验电机的发热情况( 5 )测试效率,转矩等到此,实验样机的三菱伺服电机调试完成一轮。
交流伺服电机编码器调零方法 -回复

交流伺服电机编码器调零方法-回复交流伺服电机是一种广泛应用于工业自动化领域的电机,具有高速、高精度和高可靠性的特点。
在使用交流伺服电机的过程中,编码器的调零是非常重要的步骤,它能够确保电机在正常运行时能够准确地测量和控制位置。
本文将介绍一种常见的交流伺服电机编码器调零方法。
第一步,了解编码器的工作原理编码器是一种用于测量物体位置的设备,它通过将位置信息转换为脉冲信号来实现。
在交流伺服电机中,编码器通常由两部分组成:光电转换器和光电反射片。
光电转换器通过发射和接受光信号来测量物体的位置,而光电反射片则用于反射光信号。
通过统计脉冲信号的数量,我们可以准确地计算出物体的位置。
第二步,确认编码器类型和工作模式在进行编码器调零之前,我们需要确认编码器的类型和工作模式。
交流伺服电机通常有绝对值编码器和增量值编码器两种类型。
绝对值编码器可以直接读取位置信息,而增量值编码器则需要在起始位置调零后才能正确测量位置。
根据不同的编码器类型,我们需要选择相应的调零方法。
第三步,准备工作在进行编码器调零之前,我们需要进行一些准备工作。
首先,确保电机处于停止状态,并断开电源。
然后,根据编码器类型,确认调零信号的引脚和连接方式。
最后,通过调整传感器位置和角度,使得光电转换器和光电反射片能够正常工作。
第四步,调整编码器位置在调整编码器位置之前,我们需要先了解编码器初始位置和调零方向。
编码器的初始位置可以通过电机参数手册或厂家提供的信息获得。
调零方向可以分为顺时针和逆时针两种,具体取决于编码器的安装方式。
根据初始位置和调零方向,我们可以确定将编码器移动到调零位置所需的角度。
第五步,执行编码器调零在调整编码器位置后,我们可以开始执行编码器调零操作。
首先,将电源连接到电机并启动电机控制器。
然后,通过电机控制器的软件界面选择调零功能。
根据电机控制器的提示,执行相应的操作以启动编码器调零过程。
在调零过程中,电机将以特定的速度和方向移动,直到编码器的零点位置被正确设置。
伺服电机编码器作用与调零

伺服电机编码器作用与调零绝对值型编码器可以精确地测量电机的位置,无论电机是在开机时静止的位置还是运动中的位置。
它通过一组唯一的编码值来表示电机的位置,每个位置对应一个特定的编码值,可以实现高精度的位置控制。
绝对值型编码器通常用于对位置精度要求较高的应用,如机械臂、数控机床等。
增量型编码器则是通过测量电机转动时产生的脉冲数来计算位置和速度。
它不知道电机的起始位置,只能知道在电机运动时相对位置的变化。
增量型编码器通常用于速度控制较为重要的应用,如机械运动控制、印刷机等。
除了用于测量位置和速度,伺服电机编码器还可以用于调零。
调零是指将电机调整到一个已知的起始位置,以使控制系统能够准确地控制电机运动。
调零过程通常包括以下几个步骤:1.初始化编码器:在开始调零操作之前,需要将编码器的计数器清零,以确保测量的准确性。
2.设定起始位置:确定将电机调整到的起始位置,可以通过手动调整或通过控制器指令实现。
3.移动电机:在确定了起始位置后,需要将电机移动到起始位置,并确保电机稳定停在该位置上。
4.标定位置偏差:将电机移动到起始位置后,测量其实际位置与目标位置之间的偏差,并将该偏差记录下来,用于后续的位置控制。
5.调整控制参数:根据实际位置偏差的测量结果,对控制系统的参数进行调整,以实现更准确的位置控制。
6.完成调零:经过以上步骤的调整后,可以认为电机已经完成了调零操作,可以开始进行正常的位置控制。
总结起来,伺服电机编码器是用于测量电机位置、速度和方向的装置,它可以实现高精度的位置和速度控制。
调零是一项重要的操作,它可以确保电机在控制系统中的位置准确性,并为后续的位置控制提供基础。
通过合理地使用伺服电机编码器和进行精确的调零操作,可以实现更高精度和可靠性的电机控制。
各种编码器的调零方法

各种编码器的调零方法增量式编码器的相位对齐方式增量式编码器的输出信号为方波信号;又可以分为带换相信号的增量式编码器和普通的增量式编码器;普通的增量式编码器具备两相正交方波脉冲输出信号A和B;以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外;还具备互差120度的电子换相信号UVW;UVW各自的每转周期数与电机转子的磁极对数一致..带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位;或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;将电机轴定向至一个平衡位置;2.用示波器观察编码器的U相信号和Z信号;3.调整编码器转轴与电机轴的相对位置;4.一边调整;一边观察编码器U相信号跳变沿;和Z信号;直到Z信号稳定在高电平上在此默认Z信号的常态为低电平;锁定编码器与电机的相对位置关系;5.来回扭转电机轴;撒手后;若电机轴每次自由回复到平衡位置时;Z信号都能稳定在高电平上;则对齐有效..撤掉直流电源后;验证如下:1.用示波器观察编码器的U相信号和电机的UV线反电势波形;2.转动电机轴;编码器的U相信号上升沿与电机的UV线反电势波形由低到高的过零点重合;编码器的Z信号也出现在这个过零点上..上述验证方法;也可以用作对齐方法..需要注意的是;此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐;由于电机的U相反电势;与UV线反电势之间相差30度;因而这样对齐后;增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐;而电机电角度相位与U相反电势波形的相位一致;所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐..将编码器的U相信号零点与电机电角度的零点直接对齐;为达到此目的;可以:1.用3个阻值相等的电阻接成星型;然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;2.以示波器观察电机U相输入与星型电阻的中点;就可以近似得到电机的U相反电势波形;3.依据操作的方便程度;调整编码器转轴与电机轴的相对位置;或者编码器外壳与电机外壳的相对位置;4.一边调整;一边观察编码器的U相信号上升沿和电机U相反电势波形由低到高的过零点;最终使上升沿和过零点重合;锁定编码器与电机的相对位置关系;完成对齐..由于普通增量式编码器不具备UVW相位信息;而Z信号也只能反映一圈内的一个点位;不具备直接的相位对齐潜力;因而不作讨论..绝对式编码器的相位对齐方式绝对式编码器的相位对齐对于单圈和多圈而言;差别不大;其实都是在一圈内对齐编码器的检测相位与电机电角度的相位..早期的绝对式编码器会以单独的引脚给出单圈相位的最高位的电平;利用此电平的0和1的翻转;也可以实现编码器和电机的相位对齐;方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;将电机轴定向至一个平衡位置;2.用示波器观察绝对编码器的最高计数位电平信号;3.调整编码器转轴与电机轴的相对位置;4.一边调整;一边观察最高计数位信号的跳变沿;直到跳变沿准确出现在电机轴的定向平衡位置处;锁定编码器与电机的相对位置关系;5.来回扭转电机轴;撒手后;若电机轴每次自由回复到平衡位置时;跳变沿都能准确复现;则对齐有效..这类绝对式编码器目前已经被采用EnDA T;BiSS;Hyperface等串行协议;以及日系专用串行协议的新型绝对式编码器广泛取代;因而最高位信号就不符存在了;此时对齐编码器和电机相位的方法也有所变化;其中一种非常实用的方法是利用编码器内部的EEPROM;存储编码器随机安装在电机轴上后实测的相位;具体方法如下:1.将编码器随机安装在电机上;即固结编码器转轴与电机轴;以及编码器外壳与电机外壳;2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;将电机轴定向至一个平衡位置;3.用伺服驱动器读取绝对编码器的单圈位置值;并存入编码器内部记录电机电角度初始相位的EEPROM中;4.对齐过程结束..由于此时电机轴已定向于电角度相位的-30度方向;因此存入的编码器内部EEPROM中的位置检测值就对应电机电角度的-30度相位..此后;驱动器将任意时刻的单圈位置检测数据与这个存储值做差;并根据电机极对数进行必要的换算;再加上-30度;就可以得到该时刻的电机电角度相位..这种对齐方式需要编码器和伺服驱动器的支持和配合方能实现;日系伺服的编码器相位之所以不便于最终用户直接调整的根本原因就在于不肯向用户提供这种对齐方式的功能界面和操作方法..这种对齐方法的一大好处是;只需向电机绕组提供确定相序和方向的转子定向电流;无需调整编码器和电机轴之间的角度关系;因而编码器可以以任意初始角度直接安装在电机上;且无需精细;甚至简单的调整过程;操作简单;工艺性好..如果绝对式编码器既没有可供使用的EEPROM;又没有可供检测的最高计数位引脚;则对齐方法会相对复杂..如果驱动器支持单圈绝对位置信息的读出和显示;则可以考虑:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;将电机轴定向至一个平衡位置;2.利用伺服驱动器读取并显示绝对编码器的单圈位置值;3.调整编码器转轴与电机轴的相对位置;4.经过上述调整;使显示的单圈绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的单圈绝对位置点;锁定编码器与电机的相对位置关系;5.来回扭转电机轴;撒手后;若电机轴每次自由回复到平衡位置时;上述折算位置点都能准确复现;则对齐有效..如果连绝对值信息都无法获得;那么就只能借助原厂的专用工装;一边检测绝对位置检测值;一边检测电机电角度相位;利用工装;调整编码器和电机的相对角位置关系;将编码器相位与电机电角度相位相互对齐;然后再锁定..这样一来;就更加无从自行解决编码器的相位对齐问题了..推荐采用在EEPROM中存储初始安装位置的方法;简单;实用;适应性好;便于向用户开放;以便用户自行安装编码器;并完成电机电角度的相位整定..正余弦编码器的相位对齐方式普通的正余弦编码器具备一对正交的sin;cos 1Vp-p信号;相当于方波信号的增量式编码器的AB正交信号;每圈会重复许许多多个信号周期;比如2048等;以及一个窄幅的对称三角波Index信号;相当于增量式编码器的Z信号;一圈一般出现一个;这种正余弦编码器实质上也是一种增量式编码器..另一种正余弦编码器除了具备上述正交的sin、cos信号外;还具备一对一圈只出现一个信号周期的相互正交的1Vp-p的正弦型C、D信号;如果以C信号为sin;则D 信号为cos;通过sin、cos信号的高倍率细分技术;不仅可以使正余弦编码器获得比原始信号周期更为细密的名义检测分辨率;比如2048线的正余弦编码器经2048细分后;就可以达到每转400多万线的名义检测分辨率;当前很多欧美伺服厂家都提供这类高分辨率的伺服系统;而国内厂家尚不多见;此外带C、D信号的正余弦编码器的C、D信号经过细分后;还可以提供较高的每转绝对位置信息;比如每转2048个绝对位置;因此带C、D信号的正余弦编码器可以视作一种模拟式的单圈绝对编码器..采用这种编码器的伺服电机的初始电角度相位对齐方式如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;将电机轴定向至一个平衡位置;2.用示波器观察正余弦编码器的C信号波形;3.调整编码器转轴与电机轴的相对位置;4.一边调整;一边观察C信号波形;直到由低到高的过零点准确出现在电机轴的定向平衡位置处;锁定编码器与电机的相对位置关系;5.来回扭转电机轴;撒手后;若电机轴每次自由回复到平衡位置时;过零点都能准确复现;则对齐有效..撤掉直流电源后;验证如下:1.用示波器观察编码器的C相信号和电机的UV线反电势波形;2.转动电机轴;编码器的C相信号由低到高的过零点与电机的UV线反电势波形由低到高的过零点重合..这种验证方法;也可以用作对齐方法..此时C信号的过零点与电机电角度相位的-30度点对齐..如果想直接和电机电角度的0度点对齐;可以考虑:1.用3个阻值相等的电阻接成星型;然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;2.以示波器观察电机U相输入与星型电阻的中点;就可以近似得到电机的U相反电势波形;3.调整编码器转轴与电机轴的相对位置;4.一边调整;一边观察编码器的C相信号由低到高的过零点和电机U相反电势波形由低到高的过零点;最终使2个过零点重合;锁定编码器与电机的相对位置关系;完成对齐..由于普通正余弦编码器不具备一圈之内的相位信息;而Index信号也只能反映一圈内的一个点位;不具备直接的相位对齐潜力;因而在此也不作为讨论的话题..如果可接入正余弦编码器的伺服驱动器能够为用户提供从C、D中获取的单圈绝对位置信息;则可以考虑:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;将电机轴定向至一个平衡位置;2.利用伺服驱动器读取并显示从C、D信号中获取的单圈绝对位置信息;3.调整旋变轴与电机轴的相对位置;4.经过上述调整;使显示的绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的绝对位置点;锁定编码器与电机的相对位置关系;5.来回扭转电机轴;撒手后;若电机轴每次自由回复到平衡位置时;上述折算绝对位置点都能准确复现;则对齐有效..此后可以在撤掉直流电源后;得到与前面基本相同的对齐验证效果:1.用示波器观察正余弦编码器的C相信号和电机的UV线反电势波形;2.转动电机轴;验证编码器的C相信号由低到高的过零点与电机的UV线反电势波形由低到高的过零点重合..如果利用驱动器内部的EEPROM等非易失性存储器;也可以存储正余弦编码器随机安装在电机轴上后实测的相位;具体方法如下:1.将正余弦随机安装在电机上;即固结编码器转轴与电机轴;以及编码器外壳与电机外壳;2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;将电机轴定向至一个平衡位置;3.用伺服驱动器读取由C、D信号解析出来的单圈绝对位置值;并存入驱动器内部记录电机电角度初始安装相位的EEPROM等非易失性存储器中;4.对齐过程结束..由于此时电机轴已定向于电角度相位的-30度方向;因此存入的驱动器内部EEPROM等非易失性存储器中的位置检测值就对应电机电角度的-30度相位..此后;驱动器将任意时刻由编码器解析出来的与电角度相关的单圈绝对位置值与这个存储值做差;并根据电机极对数进行必要的换算;再加上-30度;就可以得到该时刻的电机电角度相位..这种对齐方式需要伺服驱动器的在国内和操作上予以支持和配合方能实现;而且由于记录电机电角度初始相位的EEPROM等非易失性存储器位于伺服驱动器中;因此一旦对齐后;电机就和驱动器事实上绑定了;如果需要更换电机、正余弦编码器、或者驱动器;都需要重新进行初始安装相位的对齐操作;并重新绑定电机和驱动器的配套关系..旋转变压器的相位对齐方式旋转变压器简称旋变;是由经过特殊电磁设计的高性能硅钢叠片和漆包线构成的;相比于采用光电技术的编码器而言;具有耐热;耐振..耐冲击;耐油污;甚至耐腐蚀等恶劣工作环境的适应能力;因而为武器系统等工况恶劣的应用广泛采用;一对极单速的旋变可以视作一种单圈绝对式反馈系统;应用也最为广泛;因而在此仅以单速旋变为讨论对象;多速旋变与伺服电机配套;个人认为其极对数最好采用电机极对数的约数;一便于电机度的对应和极对数分解..旋变的信号引线一般为6根;分为3组;分别对应一个激励线圈;和2个正交的感应线圈;激励线圈接受输入的正弦型激励信号;感应线圈依据旋变转定子的相互角位置关系;感应出来具有SIN和COS包络的检测信号..旋变SIN和COS输出信号是根据转定子之间的角度对激励正弦信号的调制结果;如果激励信号是sinωt;转定子之间的角度为θ;则SIN信号为sinωt×sinθ;则COS信号为sinωt×cosθ;根据SIN;COS信号和原始的激励信号;通过必要的检测电路;就可以获得较高分辨率的位置检测结果;目前商用旋变系统的检测分辨率可以达到每圈2的12次方;即4096;而科学研究和航空航天系统甚至可以达到2的20次方以上;不过体积和成本也都非常可观..商用旋变与伺服电机电角度相位的对齐方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;2.然后用示波器观察旋变的SIN线圈的信号引线输出;3.依据操作的方便程度;调整电机轴上的旋变转子与电机轴的相对位置;或者旋变定子与电机外壳的相对位置;4.一边调整;一边观察旋变SIN信号的包络;一直调整到信号包络的幅值完全归零;锁定旋变;5.来回扭转电机轴;撒手后;若电机轴每次自由回复到平衡位置时;信号包络的幅值过零点都能准确复现;则对齐有效..撤掉直流电源;进行对齐验证:1.用示波器观察旋变的SIN信号和电机的UV线反电势波形;2.转动电机轴;验证旋变的SIN信号包络过零点与电机的UV线反电势波形由低到高的过零点重合..这个验证方法;也可以用作对齐方法..此时SIN信号包络的过零点与电机电角度相位的-30度点对齐..如果想直接和电机电角度的0度点对齐;可以考虑:1.用3个阻值相等的电阻接成星型;然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;2.以示波器观察电机U相输入与星型电阻的中点;就可以近似得到电机的U相反电势波形;3.依据操作的方便程度;调整编码器转轴与电机轴的相对位置;或者编码器外壳与电机外壳的相对位置;4.一边调整;一边观察旋变的SIN信号包络的过零点和电机U相反电势波形由低到高的过零点;最终使这2个过零点重合;锁定编码器与电机的相对位置关系;完成对齐..需要指出的是;在上述操作中需有效区分旋变的SIN包络信号中的正半周和负半周..由于SIN 信号是以转定子之间的角度为θ的sinθ值对激励信号的调制结果;因而与sinθ的正半周对应的SIN信号包络中;被调制的激励信号与原始激励信号同相;而与sinθ的负半周对应的SIN信号包络中;被调制的激励信号与原始激励信号反相;据此可以区别判断旋变输出的SIN包络信号波形中的正半周和负半周;对齐时;需要取sinθ由负半周向正半周过渡点对应的SIN包络信号的过零点;如果取反了;或者未加准确判断的话;对齐后的电角度有可能错位180度;从而有可能造成速度外环进入正反馈..如果可接入旋变的伺服驱动器能够为用户提供从旋变信号中获取的与电机电角度相关的绝对位置信息;则可以考虑:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;将电机轴定向至一个平衡位置;2.利用伺服驱动器读取并显示从旋变信号中获取的与电机电角度相关的绝对位置信息;3.依据操作的方便程度;调整旋变轴与电机轴的相对位置;或者旋变外壳与电机外壳的相对位置;4.经过上述调整;使显示的绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的绝对位置点;锁定编码器与电机的相对位置关系;5.来回扭转电机轴;撒手后;若电机轴每次自由回复到平衡位置时;上述折算绝对位置点都能准确复现;则对齐有效..此后可以在撤掉直流电源后;得到与前面基本相同的对齐验证效果:1.用示波器观察旋变的SIN信号和电机的UV线反电势波形;2.转动电机轴;验证旋变的SIN信号包络过零点与电机的UV线反电势波形由低到高的过零点重合..如果利用驱动器内部的EEPROM等非易失性存储器;也可以存储旋变随机安装在电机轴上后实测的相位;具体方法如下:1.将旋变随机安装在电机上;即固结旋变转轴与电机轴;以及旋变外壳与电机外壳;2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电;U入;V出;将电机轴定向至一个平衡位置;3.用伺服驱动器读取由旋变解析出来的与电角度相关的绝对位置值;并存入驱动器内部记录电机电角度初始安装相位的EEPROM等非易失性存储器中;4.对齐过程结束..由于此时电机轴已定向于电角度相位的-30度方向;因此存入的驱动器内部EEPROM等非易失性存储器中的位置检测值就对应电机电角度的-30度相位..此后;驱动器将任意时刻由旋变解析出来的与电角度相关的绝对位置值与这个存储值做差;并根据电机极对数进行必要的换算;再加上-30度;就可以得到该时刻的电机电角度相位..这种对齐方式需要伺服驱动器的在国内和操作上予以支持和配合方能实现;而且由于记录电机电角度初始相位的EEPROM等非易失性存储器位于伺服驱动器中;因此一旦对齐后;电机就和驱动器事实上绑定了;如果需要更换电机、旋变、或者驱动器;都需要重新进行初始安装相位的对齐操作;并重新绑定电机和驱动器的配套关系..注意1.以上讨论中;所谓对齐到电机电角度的-30度相位的提法;是以UV反电势波形滞后于U相30度的前提为条件..2.以上讨论中;都以UV相通电;并参考UV线反电势波形为例;有些伺服系统的对齐方式可能会采用UW相通电并参考UW线反电势波形..3.如果想直接对齐到电机电角度0度相位点;也可以将U相接入低压直流源的正极;将V相和W相并联后接入直流源的负端;此时电机轴的定向角相对于UV相串联通电的方式会偏移30度;以文中给出的相应对齐方法对齐后;原则上将对齐于电机电角度的0度相位;而不再有-30度的偏移量..这样做看似有好处;但是考虑电机绕组的参数不一致性;V相和W相并联后;分别流经V相和W相绕组的电流很可能并不一致;从而会影响电机轴定向角度的准确性..而在UV 相通电时;U相和V相绕组为单纯的串联关系;因此流经U相和V相绕组的电流必然是一致的;电机轴定向角度的准确性不会受到绕组定向电流的影响..4.不排除伺服厂商有意将初始相位错位对齐的可能性;尤其是在可以提供绝对位置数据的反馈系统中;初始相位的错位对齐将很容易被数据的偏置量补偿回来;以此种方式也许可以起到某种保护自己产品线的作用..只是这样一来;用户就更加无从知道伺服电机反馈元件的初始相位到底该对齐到哪儿了..用户自然也不愿意遇到这样的供应商..。
伺服电机维修之编码器对位调零(全面版)资料

(全面版)资料伺服电机转子反馈的检测相位与转子磁极相位的对齐方式论坛中总是有人问及伺服电机编码器相位与转子磁极相位零点如何对齐的问题,这样的问题论坛中多有回答,本人也曾在多个帖子有所回复,鉴于本人的回复较为零散,早就想整理集中一下,只是一直未能如愿,今借十一长假之际,将自己对这一问题的经验和体会整理汇总一下,以供大家参考,或者有个全面的了解。
永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐其唯一目的就是要达成矢量控制的目标,使d轴励磁分量和q轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而获得最佳的出力效果,即“类直流特性”,这种控制方法也被称为磁场定向控制(FOC,达成FOC 控制目标的外在表现就是永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,如下图所示:图1因此反推可知,只要想办法令永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,就可以达成FOC控制目标,使永磁交流伺服电机的初级电磁场与磁极永磁场正交,即波形间互差90度电角度,如下图所示:图2如何想办法使永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致呢?由图1可知,只要能够随时检测到正弦型反电势波形的电角度相位,然后就可以相对容易地根据此相位生成与反电势波形一致的正弦型相电流波形了,因此相位对齐就可以转化为编码器相位与反电势波形相位的对齐关系。
在实际操作中,欧美厂商习惯于采用给电机的绕组通以小于额定电流的直流电流使电机转子定向的方法来对齐编码器和转子磁极的相位。
当电机的绕组通入小于额定电流的直流电流时,在无外力条件下,初级电磁场与磁极永磁场相互作用,会相互吸引并定位至互差0度相位的平衡位置上,如下图所示:图3对比上面的图3和图2可见,虽然U相绕组(红色的位置同处于电磁场波形的峰值中心(特定角度,但FOC控制下,U相中心与永磁体的q轴对齐,而空载定向时,U相中心却与d轴对齐,也就实现了a轴或¦Á轴与d轴间的对齐关系,此时相位对齐到电角度0度,电机绕组中施加的转子定向电流的方向为U相入,VW出,由于V相与W 相是并联关系,流经V相和W相的电流有可能出现不平衡,从而影响转子定向的准确性。