最小二乘法的椭圆拟合
最小二乘法椭圆拟合

最小二乘法椭圆拟合最小二乘法椭圆拟合是一种常用的数据处理方法,在很多领域中都有着广泛的应用。
本文将从什么是椭圆、最小二乘法和椭圆拟合的原理、步骤、优劣性及应用等方面介绍椭圆拟合的相关知识,并为读者提供一些实际应用的指导。
一、什么是椭圆?椭圆是一个平面内一组点到定点F1和F2的距离和为常数2a,同时F1和F2之间的距离为2c的点的集合。
椭圆也可以通过半轴a和半轴b描述。
其中a是长半轴,b是短半轴。
当a=b时,椭圆变为圆。
二、最小二乘法在统计学中,最小二乘法是一种优化问题的解决方法。
其主要思想是寻找一个函数,使得该函数的平方误差最小。
最小二乘法可以应用于拟合数据、数据平滑和模型选择等。
三、椭圆拟合椭圆拟合是一种利用最小二乘法对数据点进行椭圆拟合的方法。
通过选定适当的变量,确定椭圆的参数,如半轴a、b、圆心坐标以及旋转角度等。
然后根据最小二乘法的原理,对数据点进行拟合,以得到最佳结果。
椭圆拟合的步骤如下:1、对给定数据点进行转换,使得椭圆的中心位于坐标系的原点。
2、确定初始半轴长度和旋转角度,以及拟合系数。
3、根据拟合系数的值,计算每个数据点到椭圆的距离。
4、通过最小二乘法计算椭圆的半轴、中心坐标及旋转角度等参数。
5、根据计算结果得到拟合后的椭圆形状和位置。
椭圆拟合的优劣性:椭圆拟合是一种常用的数据处理方法,具有较高的精度和稳定性。
对于大多数应用场合,椭圆拟合提供了较好的结果。
但由于其计算量较大,对于大数据量的情况,需要选择合适的算法加以处理。
椭圆拟合的应用:椭圆拟合的应用领域非常广泛。
例如,医学影像诊断中的肿瘤边缘拟合、图像分析中的目标检测、遥感图像处理中的轨迹分析等等。
在实际应用中,我们可以根据具体的需求和情况,选择合适的方法,把椭圆拟合技术应用到数据处理中。
总之,最小二乘法椭圆拟合是一种常用的数据拟合方法,具有许多应用。
通过对其原理、步骤、优劣性及应用方面做出详细介绍,相信读者已经对椭圆拟合有了全面的认识,能够灵活运用于实际应用中。
(完整版)最小二乘法拟合椭圆附带matlab程序
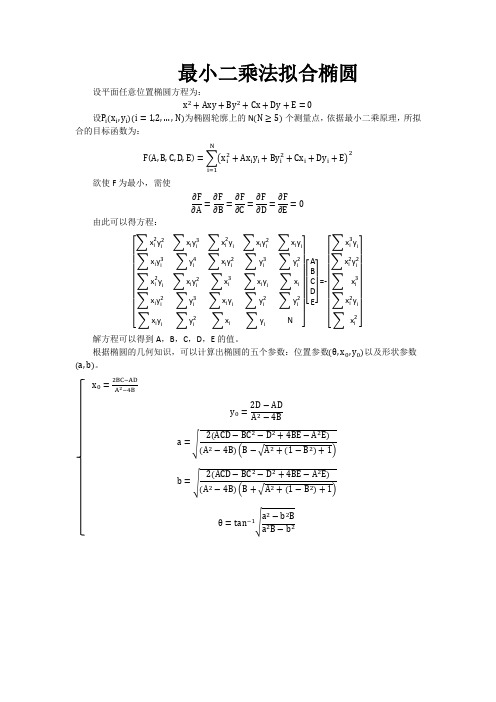
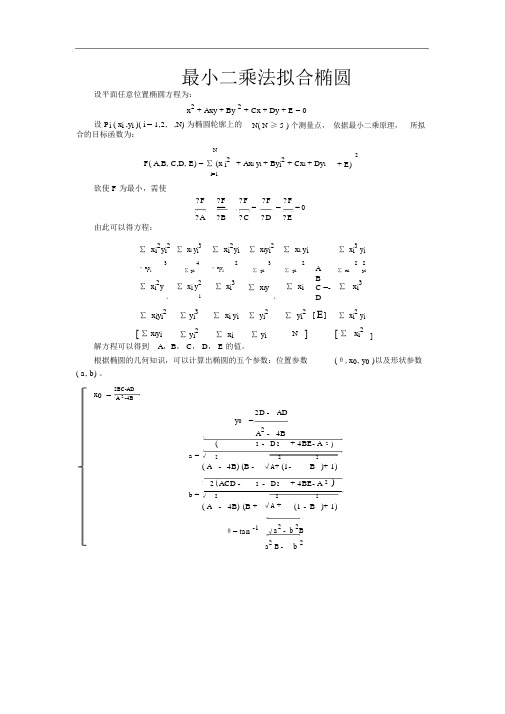
最小二乘法拟合椭圆设平面任意位置椭圆方程为:x 2+Axy +By 2+Cx +Dy +E =0设P i (x i ,y i )(i =1,2,…,N )为椭圆轮廓上的N (N ≥5) 个测量点,依据最小二乘原理,所拟合的目标函数为:F (A,B,C,D,E )=∑(x i 2+Ax i y i +By i 2+Cx i +Dy i +E)2Ni=1欲使F 为最小,需使∂F ∂A =∂F ∂B =∂F ∂C =∂F ∂D =∂F ∂E=0 由此可以得方程:[ ∑x i 2y i 2∑x i y i 3∑x i 2y i ∑x i y i 2∑x i y i ∑x i y i 3∑y i 4∑x i y i 2∑y i 3∑y i 2∑x i 2y i ∑x i y i 2∑x i 3∑x i y i ∑x i ∑x i y i 2∑y i 3∑x i y i ∑y i 2∑y i 2∑x i y i ∑y i 2∑x i ∑y i N ] [ A B C D E ] =-[∑x i 3y i ∑x i 2y i 2∑ x i 3∑x i 2y i ∑ x i 2] 解方程可以得到A ,B ,C ,D ,E 的值。
根据椭圆的几何知识,可以计算出椭圆的五个参数:位置参数(θ,x 0,y 0)以及形状参数(a,b )。
x 0=2BC−ADA 2−4By 0=2D −AD A 2−4Ba =√2(ACD −BC 2−D 2+4BE −A 2E )(A 2−4B )(B −√A 2+(1−B 2)+1)b =√2(ACD −BC 2−D 2+4BE −A 2E )(A 2−4B )(B +√A 2+(1−B 2)+1)θ=tan−1√a 2−b 2B a 2B −b 2附:MATLAB程序function [semimajor_axis, semiminor_axis, x0, y0, phi] = ellipse_fit(x, y)%% Input:% x —— a vector of x measurements% y ——a vector of y measurements%% Output:%semimajor_axis—— Magnitude of ellipse longer axis%semiminor_axis—— Magnitude of ellipse shorter axis%x0 ——x coordinate of ellipse center%y0 ——y coordinate of ellipse center%phi——Angle of rotation in radians with respect to x-axis%% explain% 2*b'*x*y + c'*y^2 + 2*d'*x + 2*f'*y + g' = -x^2% M * p = b M = [2*x*y y^2 2*x 2*y ones(size(x))],% p = [b c d e f g] b = -x^2.% p = pseudoinverse(M) * b.x = x(:);y = y(:);%Construct MM = [2*x.*y y.^2 2*x 2*y ones(size(x))];% Multiply (-X.^2) by pseudoinverse(M)e = M\(-x.^2);%Extract parameters from vector ea = 1;b = e(1);c = e(2);d = e(3);f = e(4);g = e(5);%Use Formulas from Mathworld to find semimajor_axis, semiminor_axis, x0, y0, and phi delta = b^2-a*c;x0 = (c*d - b*f)/delta;y0 = (a*f - b*d)/delta;phi = 0.5 * acot((c-a)/(2*b));nom = 2 * (a*f^2 + c*d^2 + g*b^2 - 2*b*d*f - a*c*g);s = sqrt(1 + (4*b^2)/(a-c)^2);a_prime = sqrt(nom/(delta* ( (c-a)*s -(c+a))));b_prime = sqrt(nom/(delta* ( (a-c)*s -(c+a))));semimajor_axis = max(a_prime, b_prime); semiminor_axis = min(a_prime, b_prime); if (a_prime < b_prime)phi = pi/2 - phi;end欢迎交流:邮箱:*****************。
matlab最小二乘法拟合椭圆
matlab最小二乘法拟合椭圆在MATLAB中使用最小二乘法拟合椭圆的方法如下:1. 假设我们有一组二维点的坐标数据,可以表示为 (x, y)。
我们的目标是找到一个椭圆方程来最好地拟合这些点。
2. 根据椭圆的标准方程,我们可以将椭圆表示为 Ax^2 + Bxy + Cy^2 + Dx + Ey + F = 0 的形式。
其中 A、B、C、D、E 和 F 是椭圆的参数,需要确定。
3. 我们可以将这个问题转化为一个最小二乘问题,通过找到参数 A、B、C、D、E 和 F,使得该方程对每个数据点 (x, y) 的误差最小化。
4. 在MATLAB中,可以使用 lsqnonlin 函数来解决最小二乘问题。
首先,定义一个误差函数,即方程 Ax^2 + Bxy + Cy^2 + Dx + Ey + F 的值与点 (x, y) 之间的距离差的平方之和。
5. 然后,使用 lsqnonlin 函数来最小化误差函数并找到最佳的参数 A、B、C、D、E 和 F。
以下是一个使用最小二乘法拟合椭圆的示例代码:```matlabfunction error = ellipseFit(params, x, y)A = params(1);B = params(2);C = params(3);D = params(4);E = params(5);F = params(6);error = A * x.^2 + B * x.*y + C * y.^2 + D * x + E * y + F;endx = [1, 2, 3, 4, 5]; % 输入数据点的 x 坐标y = [2, 4, 5, 6, 7]; % 输入数据点的 y 坐标params0 = [1, 1, 1, 1, 1, 1]; % 初始参数猜测值% 使用 lsqnonlin 函数求解最小二乘问题params = lsqnonlin(@(params)ellipseFit(params, x, y),params0);A = params(1);B = params(2);C = params(3);D = params(4);E = params(5);F = params(6);disp(['椭圆方程: ', num2str(A), 'x^2 + ', num2str(B),'xy + ', num2str(C), 'y^2 + ', num2str(D), 'x + ', num2str(E), 'y + ', num2str(F), ' = 0']);```这段代码根据输入的数据点坐标进行最小二乘拟合,得到椭圆方程的参数,并打印出椭圆方程。
最小二乘改进算法及其在椭圆拟合中的应用

文章编号: 1672 - 687 1 ( 20 14 ) 03 - 00 1 8 - 04
最小二乘改进算法及其在椭圆拟合中的应用
马向南, 李 航, 刘丽丽, 刘志伟
( 河南科技大学 机电工程学院, 河南 洛阳 47 1003 ) 摘要: 提出一种像素级边缘检测椭圆拟合新算法, 用该算法对最小二乘算法进行了改进。首先, 将符合要求 的 准椭圆转化到归一化坐标系; 然后利用最小二乘法进行亚像素级椭圆拟合; 最后, 采用二次曲线拟合点集求 解 出亚像素及椭圆几何中心。在给定的图形中, 利用本文提出的改进像素级边缘检测算法可以明显提高拟合 不 确定度和拟合精度。 关键词: 最小二乘法; 边缘检测; 椭圆拟合; 亚像素 中图分类号: TP39 1 文献标志码: A
图 1 算法流程图
2 实验结果及分析
2. 1 求解结果 本文提出的算法采用 Matlab 得以实现, 实验结果是在一台安 装有 Matlab 7 . 0 的机器上 运行 的。由 于一般的图片很大, Matlab 程序遍历图像搜索椭圆耗 时 较 长, 为 提 高 图 像 的 检 测 效 率, 在算法开始前对 图像进行预处理。方法为提取感兴趣区域, 只在该区域 检测 椭圆, 因 此 提 高 了 检 测 的 目 标 性, 从而提升 了检测速度。 首先对边缘进行检测, 然后需要对准椭圆点进行归一化处理: Abar =[ A( : , 1 )-dCenterXA ( : , 2 )-dCenterY ] ;
8] 。 因 此, 本文对 不足, 但是由于目标函数的表达非 常 复 杂, 所 以 求 解 过 程 工 作 量 很 大, 而且不易实现[
代数拟合法进行了改进, 旨在解决代数拟合中各参数贡献不同的问题, 弥补传统的最小二乘拟合在本文
最小二乘拟合椭圆如何加入约束条件
最小二乘拟合椭圆如何加入约束条件
最小二乘拟合椭圆时,可以加入约束条件以进一步限制拟合过程。
这些约束条件通常包括:
1. 椭圆的中心在某个特定位置:通过设置椭圆中心的位置参数,可以确保拟合的椭圆中心位于特定位置。
2. 椭圆的轴长比例:通过设置长轴和短轴的比例参数,可以限制拟合的椭圆轴长比例,确保其符合特定要求。
3. 椭圆的旋转角度:通过设置椭圆的旋转角度参数,可以限制拟合的椭圆在平面上的旋转角度,确保其与特定方向对齐。
在最小二乘法拟合椭圆的过程中,可以引入拉格朗日乘子法来处理这些约束条件。
通过引入拉格朗日乘子,可以将约束条件转化为等式约束,并将其加入到目标函数中。
然后,使用最小二乘法求解优化问题,以最小化目标函数并满足约束条件。
具体来说,对于每个约束条件,可以定义一个拉格朗日乘子,并将其与目标函数中的对应参数相乘。
这样,在最小化目标函数时,会同时考虑约束条件的影响。
通过求解优化问题,可以得到满足所有约束条件的拟合椭圆。
需要注意的是,在实际应用中,可能需要根据具体问题对约束条件进行选择和调整。
此外,对于复杂的数据集和多个约束条件的情况,最小二乘拟合椭圆的过程可能会变得比较复杂。
因此,建议在实际应用中根据具体情况选择合适的算法和工具进行拟合。
最小二乘法拟合椭圆附带matlab程序
最小二乘法拟合椭圆设平面任意位置椭圆方程为:x 2 + Axy + By 2 + Cx + Dy + E = 0设 P i ( x i ,y i )( i = 1,2, ,N) 为椭圆轮廓上的 N( N ≥ 5 ) 个测量点, 依据最小二乘原理, 所拟合的目标函数为:N2F( A,B, C,D, E) = ∑ (x i2+ Ax i y i + By i 2+ Cx i + Dy i+ E)i=1欲使 F 为最小,需使F ?F?F ?F =?F?A===?D= 0?B?C?E由此可以得方程:∑ x i 2y i 2 ∑ x i y i 3∑ x i 2y i ∑ x i y i 2∑ x i y i∑ x i 3 y i34232A 2 2∑x i yi∑ y i∑x i yi∑ y i∑ y i∑ x i y i ∑ x i 2y∑ x i y2∑ x i3∑ x i y∑ x iB∑ x i 3iiC =-iD∑ x i y i2∑ y i 3∑ y i2∑ y i2 ∑ x i 2y i∑ x i y i[ E ][ ∑ x i y i∑ y i 2 ∑ x i ∑ y iN ] [ ∑ x i2]解方程可以得到A ,B ,C ,D ,E 的值。
根据椭圆的几何知识,可以计算出椭圆的五个参数:位置参数(θ,x 0, y 0 )以及形状参数( a, b) 。
x 0 =2BC-ADA 2 -4By 0 2D - A D=4BA 2-(2 - D 2 + 4BE- A 2 )a = √ 2- 4B) (B - 2B 2)+ 1)( A √A + (1-2 ( ACD -2 -D 2+ 4BE- A 2 )b = √ 2- 4B) (B + 2(1 - B 2)+ 1)( A √A +θ= tan-1√a 2 - b 2Ba 2 B -b 2附: MATLAB程序function [semimajor_axis, semiminor_axis, x0, y0, phi] = ellipse_fit(x, y)%%Input:%x —— a vector of x measurements%y —— a vector of y measurements%%Output:%semimajor_axis —— Magnitude of ellipse longer axis%semiminor_axis —— Magnitude of ellipse shorter axis%x0 —— x coordinate of ellipse center%y0 —— y coordinate of ellipse center%phi—— Angle of rotation in radians with respect to x-axis%%explain%2*b'*x*y + c'*y^2 + 2*d'*x + 2*f'*y + g' = -x^2%M * p = b M = [2*x*y y^2 2*x 2*y ones(size(x))],% p = [b c d e f g] b = -x^2.%p = pseudoinverse(M) * b.x = x(:);y = y(:);%Construct MM = [2*x.*y y.^2 2*x 2*y ones(size(x))];%Multiply (-X.^2) by pseudoinverse(M)e = M\(-x.^2);%Extract parameters from vector ea = 1;b = e(1);c = e(2);d = e(3);f = e(4);g = e(5);%Use Formulas from Mathworld to find semimajor_axis, semiminor_axis, x0, y0, and phidelta = b^2-a*c;x0 = (c*d - b*f)/delta;y0 = (a*f - b*d)/delta;phi = 0.5 * acot((c-a)/(2*b));nom = 2 * (a*f^2 + c*d^2 + g*b^2 - 2*b*d*f - a*c*g);s = sqrt(1 + (4*b^2)/(a-c)^2);a_prime = sqrt(nom/(delta* ( (c-a)*s -(c+a))));b_prime = sqrt(nom/(delta* ( (a-c)*s -(c+a))));semimajor_axis = max(a_prime, b_prime); semiminor_axis = min(a_prime, b_prime); if(a_prime < b_prime)phi = pi/2 - phi;end。
基于稳健估计的直接最小二乘椭圆拟合
( 4 )
组成法方程求解, 迭代至收敛即可得到系数 m
[ 7 , 8 ]
解出相应的二次曲线。对于 N点的观测数据, 数学
6 ] 为: 准则 [ 2 D ( m, n ) ∑F m i n= i = 1 i N
( 2 )
按照上述数学准则, 若所有测定点均处在二次 曲线上, 则对于任意点均应满足二次曲线的一般方 程。文献[ 3 ] 中, 对不满足方程的量作最小二乘拟 合, 列出各点的误差方程为:
2 1 ) 中必须限定 b - 4 a c < 0才能保证 初衷。并且式(
拟合的结果为椭圆, 否则拟合结果有可能是抛物线
3 , 9 ] 或者双曲线的某一支 [ 。 2 假定各点观测值独立, 引入权函数 P= P为 Λ(
对角阵) , 引入新的椭圆拟合准则为: E B m m i n= Λ
2 2
( 5 ) ( 6 )
x , y ) 到曲线 F ( m , n )= 0的代数距离, 即可通 点( i i
6 ] 过求解所有点的最小代数距离平方和 [ 的方法求
2 ㊀隧道断面检测施测方案
上海长兴岛至浦东越江隧道设计为双线、 双层、 单向两车道, 上层汽车下层为轨道交通, 设计内径 6 . 8 5m , 一般每个断面以等角度或等间距测 4 0 5 0 个点。 断面检测需要高精度的观测数据, 才能正确地 反映出隧道管片与实际设计时发生的变形信息。长 江隧道工程为提高盾构贯通精度, 在隧道内布设了 高精度的导线点, 同时每隔两千米采用高精度陀螺 仪复测方位角以提高盾构导向精度。这些导线点在 隧道内均设有强制对中装置, 可以依托这些高精度 的导线点进行加密, 获取当前断面检测时测站点的 较高精度的三维坐标。测站点使用 L e i c a 1 2 0 0系列 断面扫描仪获取两套坐标, 其中一套是测站任意平 面坐标, 另外一套是工程坐标系下断面上多个点的 工程坐标系坐标。断面扫描仪根据机载软件和提前 输入的道路曲线要素自动调整以保证所测断面垂直 于当前隧道轴线, 同时可以设置一定的限差和测量 角度范围以避免扫描到过多的非管片点。 软件解算时若采用三维坐标, 需将所测得断面 先拟合到一个平面中去, 并计算出工程坐标系下的 平面方程, 然后将三维坐标转换为平面坐标以便于 采用平面二次曲线拟合的方法拟合断面椭圆
c++ 最小二乘法拟合椭圆方程

C++最小二乘法拟合椭圆方程椭圆是数学中的一个重要概念,它在几何学、物理学、工程学等领域都有着广泛的应用。
在实际的问题中,我们经常需要对给定的椭圆数据进行拟合,以找到与其最符合的椭圆方程。
而在C++编程中,最小二乘法是求解拟合问题的一种常用方法。
本文将介绍如何利用C++语言实现最小二乘法拟合椭圆方程的过程。
一、最小二乘法原理1. 概念介绍最小二乘法是一种数学优化方法,用于对一组数据进行曲线拟合。
其核心思想是通过最小化实际观测值与拟合值之间的误差平方和来确定拟合参数的取值,从而使拟合曲线尽可能地接近实际观测值。
在椭圆拟合问题中,最小二乘法可以帮助我们找到与给定数据最匹配的椭圆方程。
2. 公式推导假设我们有一组椭圆数据点(xi, yi),我们需要找到一个椭圆方程,使得数据点到椭圆边界的距离之和最小。
椭圆方程的一般形式为:(x - x0)^2 / a^2 + (y - y0)^2 / b^2 = 1其中,(x0, y0)为椭圆中心坐标,a和b分别为长轴和短轴的长度。
我们可以建立参数方程表示椭圆上的点:x = x0 + a * cos(t)y = y0 + b * sin(t)将数据点(xi, yi)代入方程,可以得到误差函数:E = Σ[(x - xi)^2 / a^2 + (y - yi)^2 / b^2 - 1]^2其中,Σ表示求和符号,E表示误差平方和。
通过最小化误差函数E,可以求得参数x0, y0, a, b的最优解,从而得到最符合给定数据的椭圆方程。
二、C++代码实现1. 数据输入我们需要从外部读入椭圆数据点(xi, yi),并存储到数组或向量中,以备后续处理。
2. 参数优化接下来,我们可以使用最小二乘法对椭圆方程的参数进行优化。
C++中可以通过梯度下降法、牛顿法等数值优化算法来求解最小化误差函数的过程,从而得到最优的椭圆参数。
3. 结果输出我们可以将优化后的椭圆方程参数输出,得到拟合结果。
基于正交最小二乘的椭圆拟合

C S
R S
C
(4)
其中 C cos , S sin ,并且 R1 RT 。 3. 点到椭圆垂点计算
图 3 垂点计算
对于坐标系 XOY 下的点 ( Xi ,Yi ) ,在局部坐标系 xoy 下的坐标为 (xi , yi ) ,该
点垂直投影到椭圆上的垂点坐标为 ( Xi,Yi) / (xi, yi) ,如图 3 所示。垂线向量与垂 点处的切线垂直,则有
x2 a2
y2 b2
1
(1)
显然,坐标系 XOY 和 xoy 之间存在一个平移和旋转变换,表示为:
x R(X Xc )
(2)
或者
X R1x Xc
(3)
其中 x x yT 为局部坐标系 xoy 下点坐标; X X Y T 为坐标系 XOY 下
点坐标; Xc X c Yc T 为椭圆中心点坐标; R 为旋转矩阵:
B1
b2 (
yi
y)C
a2 (xi
x)S
(21)
b2xS a2 yC
B2
b2 ( yi
y)S
a2 (xi
x)C
(22)
a(b2 y2 )
B3
2ay(
xi
x)
(23)
b(a2 x2 )
B4 2bx( yi y)
(24)
(a2 b2 )xy
B5 (a2 b2 )(x2 y2 xxi yyi )
J X1, JY1,
J Xm , JYm ,
X c
Yc
a
b
X1
Y1
X
m
Ym
然后按照高斯-牛顿法迭代求解
(26)
ak1 ak a
(27)
一种基于最小二乘的不完整椭圆拟合算法
(
)
* "& $& 坐标系下, 椭圆方程可写作: ( ( !, #, " )( ( & ’ & & ! # 2 * )( $ ; 显然, ) ) 与 ) ) @ 的连线与在 ) ) @ 处椭圆的法 线方向平行, 即8( D ( ) ) 2 ))( $ , 从而有: 0 ( !, #, )) , ))( ! !
第%& 卷
$ $
!" ! !# ’ ! ( $ ( $%) ! # ! ) " ’ # ! ) !!# 9$ 9( "’ (’ (" ) ’ ) # 9 ( $ ’ $ &) 9# ( ( ’ ( &%)
(*)
[ &] $ $ 不难导出 :
( "1 )
$ $
(
# #
# #
" #
# "
( ( ) & % ( )# ) ( $ & % ( $# )
(
(
Hale Waihona Puke $ $9* ’ 9( $
# ( "% &
%
# # % ’%
)
( "% &1
)
# #
(0) ( "# )
$# 实验结果
$" %# 仿真数据 $ $ 考虑两个同心椭圆, 参数分别为: #" ’ [ %# , !, 7 7 2: , :2 , "%2 ] $ #% ’ [ %* , %# , 2: , :2 , *2 ] , 样本点由 上述椭圆采样而成, 每个椭圆样本点数取为 "# 个。 对样本点进行 / ’ "## 次椭圆拟合, 并对椭圆 " 拟 合所得的各组参数依据下式计算方差:
python 椭圆拟合
Python椭圆拟合在科学计算和图像处理中,拟合椭圆是一项常见的任务。
通过将一组离散的点拟合成一个椭圆,我们可以从实验数据中提取有关对象形状和性质的有用信息。
Python 提供了多种方法来实现椭圆拟合,本文将介绍其中一种常用的方法。
1. 拟合算法原理1.1 椭圆方程一个标准的二次曲线方程可以表示为:其中A、B、C、D、E、F是曲线方程的系数。
对于椭圆而言,它可以被表示为:其中(x0, y0)是椭圆中心坐标,a和b分别是长轴和短轴的半径。
1.2 拟合方法椭圆拟合的目标是找到一组系数(A, B, C, D, E, F),使得给定的离散点集能够最好地满足椭圆方程。
常用的拟合方法是最小二乘法。
该方法通过最小化实际数据点与拟合曲线之间的残差平方和,来确定最佳的系数。
具体步骤如下:1.初始化系数(A, B, C, D, E, F)为初始值。
2.对于每个数据点(xi, yi),计算其到椭圆方程的距离d。
3.根据距离d,更新系数(A, B, C, D, E, F)。
4.重复步骤2和3,直到达到预设的迭代次数或收敛条件。
5.输出最终得到的系数(A, B, C, D, E, F)。
2. Python实现在Python中,我们可以使用SciPy库中的optimize模块来实现椭圆拟合。
optimize模块提供了curve_fit函数,该函数可以用于曲线拟合。
以下是一个示例代码:import numpy as npfrom scipy.optimize import curve_fitdef ellipse_func(xy_data,x0,y0,a,b):x = xy_data[:,0]y = xy_data[:,1]return ((x-x0)**2/a**2 + (y-y0)**2/b**2 - 1)def fit_ellipse(xy_data):x0_guess = np.mean(xy_data[:,0])y0_guess = np.mean(xy_data[:,1])a_guess = np.std(xy_data[:,0])b_guess = np.std(xy_data[:,1])popt, pcov = curve_fit(ellipse_func, xy_data, np.zeros(len(xy_data)), p0=[x0_guess, y0_guess, a_guess, b_guess])return popt# 示例用法xy_data = np.array([[1,2],[3,4],[5,6]])popt = fit_ellipse(xy_data)print(popt)在上述示例代码中,我们首先定义了一个椭圆方程的函数ellipse_func,该函数接受一组坐标数据和椭圆参数,并返回每个点到椭圆方程的距离。
最小二乘法椭圆拟合

最小二乘法椭圆拟合是一种常见的数学计算方法,用于拟合一个数据集为椭圆形状的点集。
具体步骤如下:
1.对原始数据进行中心化处理,即将所有数据减去其重心,则得到经过坐标轴原点的
新坐标系。
2.假设椭圆方程为:(x-x0)^2/a^2 + (y-y0)^2/b^2 = 1,其中(x0, y0)表示椭圆的中心,
a和b分别表示椭圆在�x和�y两个方向上的半轴长度。
3.使用最小二乘法求解椭圆参数。
假设有n个数据点(xi, yi),则需要构造关于6个未
知量(x0, y0, a, b)的方程组,每个数据点提供一个方程:(xi-x0)^2/a^2 + (yi-y0)^2/b^2 = 1。
则可以利用这些方程求解6个未知量,得到椭圆方程的解析式。
4.根据拟合出来的椭圆方程,可以计算任意点或形状相似的点的位置和属性。
需要注意的是,由于椭圆形状多样,而且数据存在误差,因此一般需要进行多次迭代,以提高拟合精度。
同时,椭圆方程的求解过程较为繁琐,可以采用一些数学计算软件(如MATLAB)来实现。
matlab学习:最小二乘拟合基于RANSAC的直线拟合椭圆拟合
matlab学习:最⼩⼆乘拟合基于RANSAC的直线拟合椭圆拟合1.最⼩⼆乘拟合最⼩⼆乘拟合是⼀种数学上的近似和优化,利⽤已知的数据得出⼀条直线或者曲线,使之在坐标系上与已知数据之间的距离的平⽅和最⼩。
2.RANSAC算法参见王荣先⽼师的博⽂3,直线拟合建⽴模型时利⽤直线的⼀般⽅程AX+BY+C=0,随机选取两点构建直线模型,计算每个点到此直线的TLS(Total Least Square),TLS⼩于⼀定阈值时的点为符合模型的点,点数最多时的模型即为最佳直线模型。
再根据此时的直线参数画出最终拟合直线。
4.椭圆拟合建⽴模型时利⽤椭圆的定义⽅程:dist(P,A)+dist(P,B)=DIST,其中P为椭圆上⼀点,A和B为椭圆两焦点。
随机选取三点A,B,P构建椭圆模型,计算每个点到此两焦点的距离和与DIST的差值,差值⼩于⼀定阈值时的点为符合模型的点,点数最多时的模型即为最佳椭圆模型,再根据符合条件的点,利⽤椭圆⼀般⽅程Ax2+Bxy+Cy2+Dx+Ey+F=0 和得到符合点进⾏系数拟合,根据函数式画出最终拟合椭圆。
5.matlab代码(1)最⼩⼆乘拟合View Code%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% FILENAME LSF.m% FUNCTION Input points with mouse,Least-squares fit of lines to% 2D points% DATE 2012-10-12% AUTHOR zhangying %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%clc;%% ⿏标输⼊点,enter键结束axis([-1010 -1010]);[x,y]=ginput; %读取坐标直到按下回车键,返回坐标点的x,y坐标num=length(x); %计算点的个数%% 直接⽤最⼩⼆乘进⾏拟合%通过最⼩化误差的平⽅和寻找数据的最佳函数匹配[p1,s1]=polyfit(x,y,1); %n=1为直线拟合 x,y为数据点,n为多项式阶数,返回p为幂次从⾼到低的多项式系数向量[p2,s2]=polyfit(x,y,num-2); %n>1为曲线拟合,找到次数为n的多项式,对于数据点集(x,y),满⾜差的平⽅和最⼩[p3,s3]=polyfit(x,y,num-1); %x必须是单调的。
matlab 最小二乘法拟合椭圆

matlab 最小二乘法拟合椭圆在MATLAB中,可以使用最小二乘法对一组数据进行椭圆拟合。
最小二乘法是一种常见的数值拟合方法,通过最小化实际数据点与拟合曲线之间的差异来确定最佳拟合参数。
首先,将椭圆的方程表示为:(x - h)^2 / a^2 + (y - k)^2 / b^2 = 1其中(h, k)是椭圆的中心坐标,a和b是椭圆的半长轴和半短轴长度。
令数据点的坐标为(xi, yi),通过最小化以下误差函数来拟合椭圆:F = sum(((xi - h)^2 / a^2 + (yi - k)^2 / b^2) - 1)^2其中,求和遍历所有数据点。
为了找到最佳的拟合参数h、k、a和b,可以使用MATLAB中的最小二乘法拟合函数如lsqcurvefit。
以下是使用最小二乘法进行椭圆拟合的MATLAB代码示例:```Matlab% 假设有一组包含椭圆上的数据点的二维矩阵data,每行包含一个点的坐标(xi, yi)% 定义误差函数fun = @(params, x) ((x(:, 1) - params(1)).^2 ./ params(3)^2 + (x(:, 2) - params(2)).^2 ./ params(4)^2 - 1).^2;% 初始化参数的初始猜测值params0 = [0, 0, 1, 1];% 使用最小二乘法进行拟合params = lsqcurvefit(fun, params0, data(:, 1), data(:, 2));% 提取拟合的椭圆参数h = params(1); % 中心坐标xk = params(2); % 中心坐标ya = params(3); % 半长轴长度b = params(4); % 半短轴长度% 绘制原始数据点和拟合的椭圆figure;plot(data(:, 1), data(:, 2), 'bo'); % 原始数据点hold on;theta = linspace(0, 2*pi, 100);x = h + a*cos(theta); % x坐标y = k + b*sin(theta); % y坐标plot(x, y, 'r-', 'LineWidth', 2); % 拟合的椭圆axis equal;xlabel('x');ylabel('y');title('椭圆拟合');legend('数据点', '拟合椭圆');```在以上代码中,首先定义了误差函数fun,该函数计算数据点与拟合椭圆之间的差异。
scipy 最小二乘法拟合椭圆

scipy最小二乘法拟合椭圆椭圆曲线在数学和几何学中起着重要的作用,它具有许多特殊的性质和应用。
本文将介绍如何使用Scipy中的最小二乘法来拟合椭圆曲线,以便更好地理解和应用椭圆。
首先,让我们快速回顾一下最小二乘法。
最小二乘法是一种常见的数值分析方法,用于找到一条曲线或者函数,使该曲线与给定的一组数据点之间的误差最小化。
对于椭圆曲线,我们希望找到椭圆的参数,使其与给定的一组离散数据点最好地拟合。
在Scipy中,我们可以使用optimize.curve_fit()函数来进行最小二乘法拟合。
该函数可以拟合任意的模型函数,并返回最佳拟合参数。
由于椭圆曲线的方程比较复杂,我们需要自己定义一个模型函数来进行拟合。
假设我们已经有一组椭圆曲线上的数据点(x,y),我们可以将椭圆方程表示为:x=a*cos(θ)y=b*sin(θ)其中,a和b分别是椭圆的两个坐标轴的长度,θ是椭圆上的角度。
我们的目标是找到最优的a和b,使得上述方程与给定的数据点最好地拟合。
接下来,我们定义一个模型函数ellipse_func(),该函数接受输入参数θ和待拟合参数a、b,并返回对应的椭圆上的坐标点(x,y)。
```pythonimport numpy as npdef ellipse_func(θ,a,b):x=a*np.cos(θ)y=b*np.sin(θ)return x,y然后,我们可以使用optimize.curve_fit()函数进行拟合。
该函数需要传入模型函数、待拟合参数的初始值以及数据点,然后返回最佳拟合参数和协方差矩阵。
```pythonfrom scipy import optimizeθ=np.linspace(0,2*np.pi,100)x=3*np.cos(θ)+0.5*np.random.randn(100)y=5*np.sin(θ)+0.5*np.random.randn(100)popt,pcov=optimize.curve_fit(ellipse_func,θ,[x,y], p0=[2,4])在上述代码中,我们首先生成了一组椭圆上的随机数据点(x, y),然后调用optimize.curve_fit()函数进行拟合。
拟合圆的几种方法02
拟合圆的几种方法02拟合圆的几种方法02拟合圆是一种常用的数据拟合方法,它可以通过给定的数据点来找到一个最佳拟合的圆。
拟合圆在许多领域都有广泛的应用,如计算机图形学、计算机视觉、图像处理等。
在拟合圆的方法中,需要考虑到拟合的精度和计算复杂度。
下面介绍几种常用的拟合圆的方法:1.最小二乘法拟合圆:最小二乘法是一种常见的数据拟合方法,可以用于拟合圆。
该方法通过最小化数据点到拟合圆的距离之和,找到最佳拟合的圆。
具体步骤如下:a.对给定的数据点,定义一个误差函数,该函数表示每个数据点到拟合圆的距离的平方和。
b.使用优化算法(如最小二乘法)来最小化误差函数,得到最佳拟合的圆。
2.RANSAC算法拟合圆:RANSAC(Random Sample Consensus)算法是一种基于统计原理的拟合算法,可以用于拟合圆。
该方法通过随机选择一小部分数据点来计算拟合的圆,然后通过衡量其他数据点到该圆的距离来评估拟合的好坏,不断迭代直到找到最佳的圆。
具体步骤如下:a.随机选择一小部分数据点作为圆心和半径的初始值。
b.计算其他数据点到该圆的距离,并根据一定的阈值判断是否为内点。
c.根据内点重新拟合圆。
d.重复步骤b和c,直到达到一定的迭代次数或者内点个数达到一定的阈值。
3.霍夫变换拟合圆:霍夫变换是一种常用的图像处理技术,可以用于拟合圆。
该方法通过将空间上的点映射到参数空间中,找到在参数空间中具有峰值的位置,从而得到拟合的圆。
具体步骤如下:a.对给定的数据点,定义霍夫空间,该空间包括圆心的坐标和半径的范围。
b.遍历所有数据点,对每个数据点,在霍夫空间中计算对应的参数,并对应的参数空间加1c.在参数空间中找到具有峰值的位置,该位置对应于拟合的圆。
需要注意的是,在拟合圆的过程中,可能会遇到一些问题,如数据点存在噪声、数据点不均匀分布等。
针对这些问题,可以采取一些预处理措施,如滤波去噪、数据归一化等,以提高拟合的准确性和稳定性。
椭圆拟合算法
椭圆拟合算法
椭圆拟合算法是一种技术,它可以把一组点近似拟合成一个椭圆形。
它最初被用于图像处理中的轮廓提取。
今天,它在机器视觉应用中被广泛使用,用于检测任何具有椭圆形的特征的物体,例如人脸、眼睛、鼻子、车辆标志牌等。
椭圆拟合算法通常准确、可靠,特别是对于噪声数据和椭圆形数据。
它也很灵活,可以用来拟合任意椭圆形,甚至可以拟合交叉形,只要它们中心相同或稍有偏移。
椭圆拟合算法通常包括三个阶段:数据获取、椭圆拟合和拟合参数计算。
数据获取阶段包括首先确定数据的分布和分段情况,因为不同的数据分布会产生不同的结果,从而影响拟合结果的准确性。
其次,数据点的处理包括连接点、拟合点、旋转等。
椭圆拟合算法的第二个阶段是椭圆拟合。
其中,位置拟合包括使用最小二乘法或最小二乘法之类的方法来拟合椭圆,从而尽可能准确地拟合给定的点。
型拟合椭圆的过程主要是最小二乘法和迭代最小二乘法两种方法,其中最小二乘法是直接拟合椭圆,而迭代最小二乘法则首先进行预处理,再对椭圆进行拟合。
最后一个阶段是拟合参数计算,它主要是计算拟合椭圆的参数,比如尺寸、位置、旋转角度等,其结果可以用来检测端点、检测直线、检测角等,同时也可以帮助分辨出人脸,眼睛,鼻子等特征。
椭圆拟合算法是一项既灵活又高效的技术,可以用于机器视觉系统中,用于检测各种椭圆形特征的物体。
它能够准确简洁地估计数据
点的分布,重建任何椭圆形特征的物体,从而帮助机器视觉系统作出准确判断。
最小二乘法求椭圆拟合特征值为负
最小二乘法求椭圆拟合特征值为负最小二乘法是一种常用的数据拟合方法,可以用于解决椭圆拟合问题。
椭圆是一种非常常见的几何形状,它可以用一组参数来描述,包括椭圆的长半轴、短半轴、中心坐标等。
如果给定了一组离散点,我们可以通过最小二乘法来拟合出一个椭圆,使得拟合出的椭圆与这组离散点的误差最小。
最小二乘法的思路是:我们假设椭圆的参数已知,然后计算每个离散点到椭圆的距离。
我们希望找到最优的参数,使得这些距离的平方和最小化。
下面我们将详细介绍椭圆拟合的最小二乘法的计算过程。
首先,我们需要给出椭圆的参数化方程。
对于一个标准的椭圆,其参数化方程可以写为:x = xc + a * cos(t)y = yc + b * sin(t)其中,(xc, yc)为椭圆的中心坐标,a为长半轴长度,b为短半轴长度,t为参数。
然后,我们假设已经有一组离散点(xi, yi),我们需要找到最优的椭圆参数,使得拟合出的椭圆与这些离散点的误差最小。
假设误差函数为E(a, b, xc, yc),我们的目标是最小化E(a, b, xc, yc)。
误差函数的定义可以有多种定义方式,但在椭圆拟合中,一种常用的误差函数定义如下:E(a, b, xc, yc) = Σ[ (xi - (xc + a * cos(ti)))^2 + (yi - (yc + b * sin(ti)))^2 ]其中,Σ表示对所有离散点求和,(xi, yi)为离散点的坐标,ti 为离散点对应的参数。
接下来,我们将误差函数E(a, b, xc, yc)关于椭圆参数a、b、xc、yc分别求偏导数,并令其为0,求出最优的椭圆参数。
∂E/∂a = 0∂E/∂b = 0∂E/∂xc = 0∂E/∂yc = 0对于这四个方程组,我们可以通过数值计算的方法求解最优解。
在求解的过程中,可能会出现特征值为负的情况。
特征值为负的意思是说,相应的解会导致误差函数增加,这意味着椭圆不能很好地拟合数据。
最小二乘椭圆拟合算法实现opencv
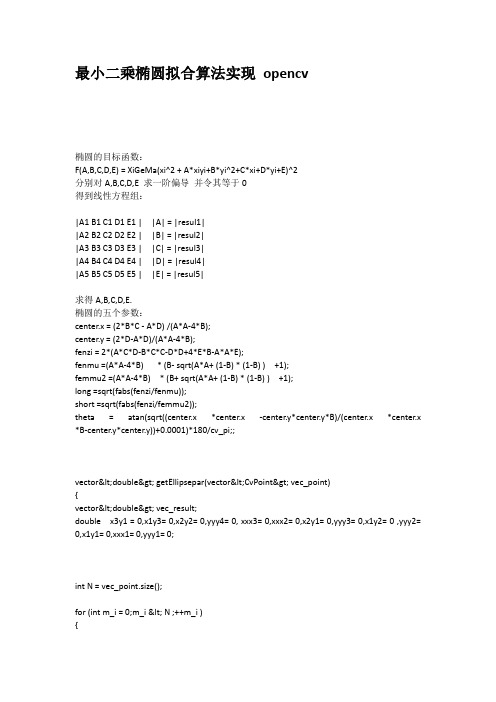
最小二乘椭圆拟合算法实现opencv椭圆的目标函数:F(A,B,C,D,E) = XiGeMa(xi^2 + A*xiyi+B*yi^2+C*xi+D*yi+E)^2分别对A,B,C,D,E 求一阶偏导并令其等于0得到线性方程组:|A1 B1 C1 D1 E1 | |A| = |resul1||A2 B2 C2 D2 E2 | |B| = |resul2||A3 B3 C3 D3 E3 | |C| = |resul3||A4 B4 C4 D4 E4 | |D| = |resul4||A5 B5 C5 D5 E5 | |E| = |resul5|求得A,B,C,D,E.椭圆的五个参数:center.x = (2*B*C - A*D) /(A*A-4*B);center.y = (2*D-A*D)/(A*A-4*B);fenzi = 2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);fenmu =(A*A-4*B) * (B- sqrt(A*A+ (1-B) * (1-B) ) +1);femmu2 =(A*A-4*B) * (B+ sqrt(A*A+ (1-B) * (1-B) ) +1);long =sqrt(fabs(fenzi/fenmu));short =sqrt(fabs(fenzi/femmu2));theta = atan(sqrt((center.x *center.x -center.y*center.y*B)/(center.x *center.x *B-center.y*center.y))+0.0001)*180/cv_pi;;vector<double> getEllipsepar(vector<CvPoint> vec_point){vector<double> vec_result;double x3y1 = 0,x1y3= 0,x2y2= 0,yyy4= 0, xxx3= 0,xxx2= 0,x2y1= 0,yyy3= 0,x1y2= 0 ,yyy2= 0,x1y1= 0,xxx1= 0,yyy1= 0;int N = vec_point.size();for (int m_i = 0;m_i < N ;++m_i ){double xi = vec_point[m_i].x ;double yi = vec_point[m_i].y;x3y1 += xi*xi*xi*yi ;x1y3 += xi*yi*yi*yi;x2y2 += xi*xi*yi*yi; ;yyy4 +=yi*yi*yi*yi;xxx3 += xi*xi*xi ;xxx2 += xi*xi ;x2y1 += xi*xi*yi;x1y2 += xi*yi*yi;yyy2 += yi*yi;x1y1 += xi*yi;xxx1 += xi;yyy1 += yi;yyy3 += yi*yi*yi;}long double resul1 = -(x3y1);long double resul2 = -(x2y2);long double resul3 = -(xxx3);long double resul4 = -(x2y1);long double resul5 = -(xxx2);long double B1 = x1y3, C1 = x2y1, D1 = x1y2, E1 = x1y1, A1 = x2y2; long double B2 = yyy4, C2 = x1y2, D2 = yyy3, E2 = yyy2, A2 = x1y3; long double B3 = x1y2, C3 = xxx2, D3 = x1y1, E3 = xxx1, A3 = x2y1; long double B4 = yyy3, C4 = x1y1, D4 = yyy2, E4 = yyy1, A4 = x1y2; long double B5 = yyy2, C5 = xxx1, D5 = yyy1, E5 = N, A5 = x1y1;//CvMat* Ma = cvCreateMat(5,5,CV_64FC1);CvMat* Md = cvCreateMat(5,1,CV_64FC1);CvMat* Mb = cvCreateMat(5,1,CV_64FC1);//cvmSet(Mb,0,0,resul1);cvmSet(Mb,1,0,resul2);cvmSet(Mb,2,0,resul3);cvmSet(Mb,3,0,resul4);cvmSet(Mb,4,0,resul5);cvmSet(Ma,0,0,A1);cvmSet(Ma,0,1,B1);cvmSet(Ma,0,2,C1);cvmSet(Ma,0,3,D1);cvmSet(Ma,0,4,E1);cvmSet(Ma,1,0,A2);cvmSet(Ma,1,1,B2);cvmSet(Ma,1,2,C2);cvmSet(Ma,1,3,D2);cvmSet(Ma,1,4,E2);cvmSet(Ma,2,0,A3);cvmSet(Ma,2,1,B3);cvmSet(Ma,2,2,C3);cvmSet(Ma,2,3,D3);cvmSet(Ma,2,4,E3);cvmSet(Ma,3,0,A4);cvmSet(Ma,3,1,B4);cvmSet(Ma,3,2,C4);cvmSet(Ma,3,3,D4);cvmSet(Ma,3,4,E4);cvmSet(Ma,4,0,A5);cvmSet(Ma,4,1,B5);cvmSet(Ma,4,2,C5);cvmSet(Ma,4,3,D5); cvmSet(Ma,4,4,E5);cvSolve(Ma, Mb, Md);long double A = cvmGet(Md,0,0);long double B = cvmGet(Md,1,0);long double C = cvmGet(Md,2,0);long double D = cvmGet(Md,3,0);long double E = cvmGet(Md,4,0);double XC = (2*B*C - A*D) /(A*A-4*B);double YC =(2*D-A*D)/(A*A-4*B);long double fenzi = 2*(A*C*D-B*C*C-D*D+4*E*B-A*A*E);long double fenmu =(A*A-4*B) * (B- sqrt(A*A+ (1-B) * (1-B) ) +1);long double femmu2 =(A*A-4*B) * (B+ sqrt(A*A+ (1-B) * (1-B) ) +1);double XA =sqrt(fabs(fenzi/fenmu));double XB =sqrt(fabs(fenzi/femmu2));double Xtheta =atan(sqrt((XA*XA-XB*XB*B)/(XA*XA*B-XB*XB))+0.0001)*180/3.1415926;vec_result.push_back(XC);vec_result.push_back(YC);vec_result.push_back(XA);vec_result.push_back(XB);vec_result.push_back(Xtheta);return vec_result;}。