jacobi,高斯,牛顿迭代
Jacobi迭代法与GaussSeidel迭代法算法比较
Jacobi 迭代法与Gauss-Seidel迭代法算法比较目录1 引言 (1)1.1Jacobi迭代法 (2)1.2Gauss-Seidel迭代法 (2)1.3逐次超松弛(SOR)迭代法 (3)2算法分析 (3)3 结论 (5)4 附录程序 (5)参考文献 (8)Jacobi 迭代法与Gauss-Seidel 迭代法比较1 引言解线性方程组的方法分为直接法和迭代法,直接法是在没有舍入误差的假设下,能在预定的运算次数内求得精确解,而迭代法是构造一定的递推格式,产生逼近精确值的序列。
这两种方法各有优缺点,直接法普遍适用,但要求计算机有较大的存储量,迭代法要求的存储量较小,但必须在收敛性得以保证的情况下才能使用。
对于高阶方程组,如一些偏微分方程数值求解中出现的方程组,采用直接法计算代价比较高,迭代法则简单又实用,所以比较受工程人员青睐。
迭代法求解方程组就是构造一个无限的向量序列,使它的极限是方程组的解向量。
即使计算机过程是精确的,迭代法也不能通过有限次算术运算求得方程组的精确解,而只能逐步逼近它。
因此迭代法存在收敛性与精度控制的问题。
迭代法是常用于求解大型稀疏线性方程组(系数矩阵阶数较高且0元素较多),特别是某些偏微分方程离散化后得到的大型稀疏方程组的重要方法。
设n 元线性微分方程组b Ax = (1)的系数矩阵A 非奇异,右端向量0≠b ,因而方程组有唯一的非零解向量。
而对于这种线性方程组的近似解,前辈们发展研究了许多种有效的方法,有Jacobi 迭代法、Gauss —Seidel 迭代法,逐次超松弛迭代法(SOR 法),这几种迭代方法均属一阶线性定常迭代法,即若系数矩阵A 分解成两个矩阵N 和P 的差,即P N A -=;其中N 为可逆矩阵,线性方程组(1)化为:b x P N =-)(b Px Nx +=b N Px N x 11--+=可得到迭代方法的一般公式:d Gx xk k +=+))1(( (2)其中:P N G 1-=,b N d 1-=,对任取一向量)0(x 作为方程组的初始近似解,按递推公式产生一个向量序列)1(x ,)2(x ,...,)k x(,...,当k 足够大时,此序列就可以作为线性方程组的近似解。
jacobi迭代法原理
jacobi迭代法原理一、引言Jacobi迭代法是一种数值方法,用于解线性方程组。
它是一种简单而又实用的方法,可以在计算机上高效地实现。
本文将详细介绍Jacobi 迭代法的原理。
二、线性方程组在介绍Jacobi迭代法之前,我们先来了解一下线性方程组。
一个线性方程组可以表示为:A*x = b其中A是一个n×n的矩阵,x和b是n维列向量。
我们的目标是求解x。
三、Jacobi迭代法的基本思想Jacobi迭代法的基本思想是将矩阵A分解为两个部分:D和R。
其中D是A的对角线部分,R是除对角线外的部分。
例如,对于下面这个3×3的矩阵:A = [4 1 0; 1 4 1; 0 1 4]我们可以将其分解为:D = [4 0 0; 0 4 0; 0 0 4]R = [0 -1 0; -1 0 -1; 0 -1 0]然后我们可以将原方程组表示为:(D+R)*x = b进一步化简得到:D*x = b - R*x这就是Jacobi迭代法的基本式子。
四、Jacobi迭代法的算法流程Jacobi迭代法的算法流程如下:1. 将矩阵A分解为D和R。
2. 初始化x为一个任意的向量。
3. 对于每个迭代步骤,计算新的x值:x(i) = (b(i) - R(i)*x(i-1)) / D(i,i)4. 重复第3步,直到收敛。
五、Jacobi迭代法的收敛性Jacobi迭代法并不总是能够收敛。
如果矩阵A不满足对角线严格占优条件,则可能会出现发散的情况。
对于一个n×n的矩阵A,如果它满足以下条件之一,则称其为对角线严格占优:1. 对于所有i=1,2,...,n,有|a(i,i)| > ∑|a(i,j)| (j≠i)2. 对于所有i=1,2,...,n,有|a(i,i)| > ∑|a(j,i)| (j≠i)如果矩阵A满足对角线严格占优条件,则Jacobi迭代法一定会收敛。
六、Jacobi迭代法的优缺点Jacobi迭代法具有以下优点:1. 简单易懂:相较于其他数值方法,Jacobi迭代法更加简单易懂。
分别用 jacobi 迭代法和 gauss-seidel 迭代法,求解方程组
分别用 jacobi 迭代法和 gauss-seidel 迭代法,求解方程组【jacobi 迭代法和 gauss-seidel 迭代法分别应用于方程组的求解】1. 引言在数学领域中,方程组的求解一直是一个重要的课题。
为了解决复杂的线性方程组,人们提出了各种迭代方法,其中 jacobi 迭代法和gauss-seidel 迭代法是两种常见的方法。
本文将探讨这两种迭代方法在求解方程组中的应用。
2. jacobi 迭代法的原理和应用jacobi 迭代法是一种基于逐次逼近的迭代方法。
对于线性方程组AX=B,其中 A 是系数矩阵,X 是未知数向量,B 是已知向量。
我们可以通过以下公式进行逐次逼近:X(k+1) = D^(-1)*(B - (L+U)X(k))其中,D、L、U 分别是 A 的对角线、下三角和上三角矩阵。
jacobi 迭代法的优点在于易于理解和实现,但在收敛速度上较慢,需要进行多次迭代才能得到精确解。
在实际应用中,需要根据实际情况选择合适的迭代次数。
3. gauss-seidel 迭代法的原理和应用与 jacobi 迭代法类似,gauss-seidel 迭代法也是一种基于逐次逼近的迭代方法。
不同之处在于,gauss-seidel 迭代法在计算 X(k+1) 时利用了已经得到的 X(k) 的信息,即:X(k+1)_i = (B_i - Σ(A_ij*X(k+1)_j,j≠i))/A_ii这种方式使得 gauss-seidel 迭代法的收敛速度较快,通常比 jacobi 迭代法更快,尤其是对于对角占优的方程组。
4. 分别用 jacobi 迭代法和 gauss-seidel 迭代法求解方程组为了更具体地说明 jacobi 迭代法和 gauss-seidel 迭代法的应用,我们分别用这两种方法来求解以下方程组:2x1 + x2 = 9x1 + 3x2 = 11我们将该方程组写成矩阵形式 AX=B:|2 1| |x1| |9||1 3| * |x2| = |11|我们根据 jacobi 迭代法和 gauss-seidel 迭代法的原理,依次进行迭代计算,直到满足收敛条件。
数值分析5-用Jacobi迭代法和Gauss-Seidel迭代法求解线性方程组
x1=x2; x2=G*x2+d; N=N+1; end x=x2; 程序结果
(1)
(2)
6
for i=1:n d=A(i,i); if abs(d)<e warning('矩阵 A 输入有误'); return; end sum=0; for j=1:n if j~=i sum=sum+A(i,j)*x0(j); end end x1(i)=(b(i)-sum)/A(i,i);
end k=k+1; r=max(abs(x1-x0)); x0=x1; fprintf('第%d 次迭代:',k) fprintf('\n 与上次计算结果的距离:%f \n',r) disp(x1); if k>100
warning('不收敛'); end end x=x0;
2
程序结果
(1)
3
(2)
4
Gauss-Seidel 迭代法:
程序 clear;clc; %A=[8,-1,1;2,10,01;1,1,-5]; %b=[1;4;3];
A=[5,2,1;-1,4,2;2,-3,10]; b=[-12;20;3]; m=size(A); if m(1)~=m(2) error('矩阵 A 不是方阵'); end n=length(b); %初始化 N=0;%迭代次数 L=zeros(n);%分解 A=D+L+U,D 是对角阵,L 是下三角阵,U 是上三角阵 U=zeros(n); D=zeros(n);
= (2)
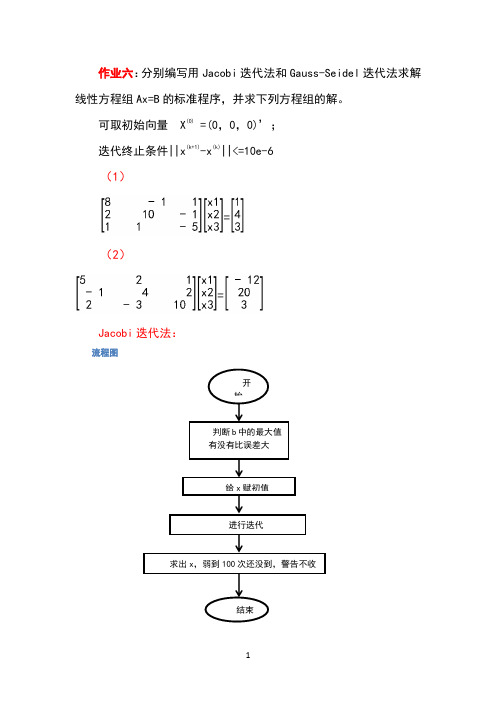
= Jacobi 迭代法:
流程图 开
始
判断 b 中的最大值 有没有比误差大
几种迭代计算方法

几种迭代计算方法迭代计算方法是一种重要的计算技术,它是基于不断逼近的原理,通过多次迭代运算来逼近所要求解的问题的计算结果。
下面将介绍几种常见的迭代计算方法。
1.不动点迭代不动点迭代是指通过选择一个合适的迭代函数来不断逼近一个不动点的过程。
不动点指的是在迭代函数中,当迭代到其中一步时,迭代函数的值等于该迭代的值,即f(x)=x。
常见的不动点迭代有牛顿迭代法和迭代法求解方程。
牛顿迭代法通过选择一个初始值x0,利用迭代函数f(x)=x-f(x)/f'(x)来逼近方程f(x)=0的根。
每次迭代中,通过计算迭代函数的值来更新x的值,直至满足一定的精度要求。
迭代法求解方程是通过将方程f(x) = 0转化为x = g(x)的形式,并选择一个合适的g(x)来进行不断迭代求解的方法。
通过选择不同的g(x),可以得到不同的迭代方法,如简单迭代法、Jacobi迭代法、Gauss-Seidel迭代法等。
2.逐次平方根法逐次平方根法是一种通过不断迭代计算来求解线性方程组的方法。
该方法通过对原始的线性方程组进行变换,将其转化为对角线元素全为1的上三角矩阵,并将方程组的解表示为逐次迭代的形式。
在每次迭代中,通过求解一个线性方程组来更新解的值,直至满足一定的精度要求。
逐次平方根法是一种迭代计算方法,其主要适用于对称正定矩阵,能够有效地求解大规模线性方程组。
3.迭代加权法迭代加权法是一种通过引入权重来加快迭代收敛速度的方法。
该方法在每次迭代更新解的时候,通过对解的不同分量引入不同的权重来控制更新的幅度。
通过合理选择权重,可以加快迭代收敛速度,提高求解效率。
迭代加权法是一种通用的迭代计算方法,在多个领域中有不同的应用,如求解矩阵特征值问题、求解最优化问题等。
以上介绍的是常见的几种迭代计算方法,它们在不同的问题中有着广泛的应用。
这些方法通过迭代运算不断逼近所要求解的问题的计算结果,具有较好的收敛性和计算效率,是一种重要的计算技术。
jacobi迭代计算式
jacobi迭代计算式Jacobi迭代是一种求解线性方程组的迭代方法。
它可以用于求解大规模的线性方程组,并且具有较好的收敛性和稳定性。
在这篇文章中,我们将介绍Jacobi迭代的原理和应用。
我们来看一下Jacobi迭代的基本原理。
对于一个n阶线性方程组Ax=b,其中A为方阵,b为常向量,Jacobi迭代的基本思想是将方程组转化为x=D^{-1}(b-Rx),其中D为A的对角矩阵,R为A 的非对角矩阵。
然后,我们可以通过不断迭代的方式求解x的近似解。
Jacobi迭代的迭代公式为x^{(k+1)}=D^{-1}(b-Rx^{(k)}),其中x^{(k)}为第k次迭代的近似解,k为迭代次数。
通过不断迭代,我们可以得到x的逼近解。
接下来,我们来看一下Jacobi迭代的应用。
Jacobi迭代广泛应用于科学计算和工程领域,特别是在求解大规模线性方程组时具有一定的优势。
它可以用于求解电力系统潮流计算、结构力学计算、流体力学计算等领域的问题。
例如,在电力系统潮流计算中,Jacobi迭代可以用于求解节点电压和节点功率的关系。
通过迭代计算,可以得到电力系统各个节点的电压和功率的近似值,从而分析电力系统的稳定性和安全性。
Jacobi迭代还可以应用于结构力学计算中的应力分析。
通过迭代计算,可以得到结构体系中各个节点的应力分布情况,从而分析结构的强度和稳定性。
在流体力学计算中,Jacobi迭代可以用于求解流体流动的速度场和压力场。
通过迭代计算,可以得到流体流动过程中各个位置的流速和压力的近似值,从而分析流体流动的规律和特性。
需要注意的是,Jacobi迭代的收敛性和稳定性与矩阵A的特征值有关。
如果矩阵A的特征值分布不合理,Jacobi迭代可能会出现不收敛或收敛速度很慢的情况。
因此,在实际应用中,需要对矩阵A进行合理的预处理,以提高迭代的收敛性和稳定性。
Jacobi迭代是一种求解线性方程组的有效方法。
它具有较好的收敛性和稳定性,并且可以广泛应用于科学计算和工程领域。
gaussnewton法
gaussnewton法
高斯牛顿法是一种非线性最小二乘问题求解方法,它基于最小二乘中误差的平方和最小的原则,通过迭代优化参数,使得误差达到最小的方法。
同样也是一种梯度下降方法,但与传统的梯度下降法不同,高斯牛顿法可以适用于非线性问题,而且相对于梯度下降法有更快的收敛速度。
高斯牛顿法主要涉及到雅可比矩阵和海森矩阵的计算。
雅可比矩阵的求解用于求解问题的初始值,并在每次迭代时计算当前值,用于计算海森矩阵。
海森矩阵是损失函数的Hessian矩阵,是损失函数的二阶导数矩阵,其求解需要数值方法求解。
然后利用计算出的雅可比矩阵和海森矩阵进行迭代更新,不断逼近最优解。
在实际问题中,高斯牛顿法通常比梯度下降方法更有效,其因为高斯牛顿法能够利用二阶导数信息(海森矩阵)更好的逼近函数的曲率,因此将收敛速度大大提高。
但同时,高斯牛顿法缺点也明显:需要计算雅可比矩阵和海森矩阵,这会涉及到大量的矩阵运算,如果数据量很大则计算量也会很大;另外,当初始值很远离最终的最优值时,可能会出现海森矩阵为负定的情况,导致无法收敛。
因此,在实际使用中,需要根据具体问题的特征选择算法。
对于数据量较小,但是需要求解非线性参数的问题,高斯牛顿法是一种不错的选择,但在数据量较大的问题中,或存在局部极小值的情况下,可能需要选择其他算法进行求解。
总之,高斯牛顿法是一种广泛应用于非线性最小二乘问题的近似最优化算法。
通
过迭代优化参数,让误差达到最小,从而得到参数的最优估计值。
高斯牛顿法在实际问题中有很多应用,如数学建模、机器学习、计算机视觉、信号处理等领域都有广泛应用。
jacobi迭代法解析:原理与应用

jacobi迭代法解析:原理与应用标题:Jacobi迭代法解析:原理与应用导语:在数值计算和线性代数中,Jacobi迭代法是一种常用的迭代方法,用于解决线性方程组。
本文将深入探讨Jacobi迭代法的原理、应用和相关领域的研究,以帮助读者对这一数值算法有更全面和深刻的了解。
一、Jacobi迭代法介绍1.1 基本原理Jacobi迭代法是一种迭代法,用于求解线性方程组Ax = b,其中A是一个方阵,x和b是向量。
该方法通过不断迭代计算逼近线性方程组的解,直至满足预设的精度要求。
1.2 迭代公式详细介绍Jacobi迭代法的迭代公式,包括终止条件和迭代收敛性分析。
1.3 算法流程介绍Jacobi迭代法的算法流程和步骤,以及如何选择合适的初始解向量和迭代次数。
1.4 算法复杂性分析分析Jacobi迭代法的时间和空间复杂性,以便读者可以评估它在实际问题中的应用可行性。
二、Jacobi迭代法的应用2.1 线性方程组求解探讨Jacobi迭代法在解决大规模线性方程组时的应用,包括稀疏矩阵和高度并行计算环境下的性能优化。
2.2 特征值求解介绍Jacobi迭代法在计算特征值和特征向量时的应用,以及与其他方法(如幂法和QR算法)的比较和优势。
2.3 图划分与图分割探讨Jacobi迭代法在图划分和图分割问题中的应用,以及如何利用迭代过程提高划分结果的质量。
2.4 数值模拟与优化讨论Jacobi迭代法在数值模拟和优化问题中的应用,如流体力学、结构力学和优化设计等领域。
三、Jacobi迭代法的扩展与改进3.1 并行Jacobi迭代法介绍并行Jacobi迭代法的思想和实现策略,包括数据并行和任务并行,并讨论其对迭代收敛性和算法效率的影响。
3.2 加速算法与预条件技术探讨Jacobi迭代法的加速算法和预条件技术,如超松弛迭代法(SOR)、不完全LU分解和多重网格方法等,以加快迭代收敛速度和提高求解精度。
3.3 进一步的应用领域介绍Jacobi迭代法在其他领域的应用,如图像处理、信号处理和机器学习等,并指出其优势和适用性。
迭代方法和最优化算法及其应用

迭代方法和最优化算法及其应用概述迭代方法和最优化算法是当代数学和计算机科学领域中非常重要的研究方向。
它们被广泛应用于各种实际问题的求解中,比如物理、金融、工程、医学、社会科学等领域。
本文将讨论迭代方法和最优化算法的基本概念、性质和应用,并以实际案例为例,说明它们在现实生活中的重要性和实用价值。
迭代方法迭代方法是一种基于递推公式或迭代框架的数值计算方法。
它的基本思想是利用已知结果来推导新的结果,并不断逼近最终解。
常见的迭代方法有牛顿迭代法、Jacobi迭代法、Gauss-Seidel迭代法、共轭梯度法、Krylov子空间方法等。
以牛顿迭代法为例,其递推公式为:$x_{k+1}=x_k-\frac{f(x_k)}{f'(x_k)}$其中,$x_k$是第k次迭代得到的近似解,$f(x)$和$f'(x)$分别是函数f(x)及其导数。
牛顿迭代法的主要优点是收敛速度较快,但也有不足之处,如迭代路径不一定收敛、局部最优解的存在、计算导数的困难性等。
最优化算法最优化算法是一种通过数学优化模型来求解优化问题的方法。
它的基本思想是通过优化目标函数来找到最优解,其中目标函数可以是线性的或非线性的,并且通常还要满足一定的限制条件。
最优化算法的常见分类有线性规划、整数规划、非线性规划、凸优化、半定规划等等。
其中最常用的最优化算法之一是梯度下降法,其主要思想是朝着当前位置负梯度方向走一步,来不断逼近最小值。
应用实例迭代方法和最优化算法被广泛应用于现实生活中各种领域的问题求解中。
以金融领域为例,投资组合优化是一个经典的优化问题,目的是在给定的风险和收益目标下,找到最优的投资组合。
这个问题可以通过构建数学模型来求解,其中一个应用广泛且高效的方法是基于最优化算法的组合优化模型。
另一方面,迭代方法和最优化算法在医学中也有广泛应用。
例如,在医学影像重建中,迭代算法可以用于改善低剂量CT图像的清晰度,从而帮助医生更准确地诊断病情。
jacobi迭代法原理

jacobi迭代法原理引言在数值计算中,我们经常需要求解线性方程组,这是一个常见的数值问题。
而jacobi迭代法是求解线性方程组的一种常用方法。
本文将对jacobi迭代法的原理进行全面、详细、完整且深入地探讨。
什么是线性方程组在了解jacobi迭代法之前,我们首先要了解什么是线性方程组。
线性方程组是一组形如下式的方程的集合:a11*x1 + a12*x2 + ... + a1n*xn = b1a21*x1 + a22*x2 + ... + a2n*xn = b2...an1*x1 + an2*x2 + ... + ann*xn = bn其中,a11、a12、…、ann为已知系数,x1、x2、…、xn为未知数,b1、b2、…、bn为已知常数项。
我们的目标是找到满足上述方程组的未知数x1、x2、…、xn的解。
jacobi迭代法的基本原理jacobi迭代法是一种迭代的算法,通过逐步迭代求解线性方程组。
算法步骤jacobi迭代法的基本步骤如下: 1. 对于线性方程组的每个方程i,将该方程中的第i个未知数x[i]视为未知数,其他未知数x[j](j≠i)视为常数。
2. 根据第一步的设定,可以得到每个方程的迭代计算公式:x[i]^(k+1) = (b[i] -a[i1]*x[1]^k - a[i2]*x[2]^k - ... - a[i(i-1)]*x[i-1]^k - a[i(i+1)]*x[i+1]^k - ... - a[in]*x[n]^k) / a[ii]其中,x[i]^k表示第k次迭代中第i个未知数的值,a[ij]表示第i行第j个系数,b[i]表示第i个常数项。
3.按照第二步的迭代公式,进行多次迭代,直到迭代结果满足精度要求为止。
迭代收敛性对于jacobi迭代法,迭代过程是否收敛是一个重要的问题。
在满足一定条件下,jacobi迭代法是收敛的。
我们定义误差向量e^(k)为第k次迭代的解向量与真实解向量之差:e^(k) = x - x^k其中,x表示真实解向量,x^k表示第k次迭代的解向量。
实验4 Jacobi迭代法和GS迭代2
实验题目 1. Jacobi 迭代法用Jacobi 迭代法求解线性方程组AX b =,保留四位有效数字(err =1e-4),其中A=[8 -1 1;2 10 -1;1 1 -5]; b=[1 ;4; 3]。
2.Gauss-Seidel 迭代法用Gauss-Seidel 迭代法求解线性方程组AX b =,保留四位有效数字(err =1e-4),其中A=[8 -1 1;2 10 -1;1 1 -5]; b=[1 ;4; 3]。
3.分别用Jacobi 迭代法和Gauss-Seidel 迭代法求解方程组12345641010001410105014001010041060101412010146x x x x x x ⎡⎤--⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--=⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥----⎢⎥⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦⎣⎦ 要求精度0.00001ε=,初始00=x ,最大迭代次数N=25,试比较这几种迭代法的迭代次数和收敛速度。
1.程序: #include<math.h> #include<stdio.h> int main(){int n=3,i,k,j,mm=1000;//最大迭代次数; float t,x[mm][n],dx[n],dx_max=1,err=1e-4;//精度 for(i=0;i<n;i++) x[0][i]=0;float a[3][3]={8,-1,1,2,10,-1,1,1,-5}; float b[3]={1,4,3}; for(i=0;i<n;i++){ b[i]=b[i]/a[i][i]; }for(i=0;i<n;i++){ for(j=0;j<n;j++) if(j!=i)a[i][j]=a[i][j]/a[i][i];a[i][i]=0;}printf("精度1e-4时,解x'[%d]=\n",n); for(k=0;dx_max>1e-8;k++){dx_max=0;for(i=0;i<n;i++){t=0;for(j=0;j<n;j++)t+=a[i][j]*x[k][j];x[k+1][i]=b[i]-t;printf("%0.4f ",x[k+1][i]);dx[i]=x[k+1][i]-x[k][i];dx_max+=pow(dx[i],2);}printf(" %d",k+1);printf("\n");} printf("\n");}程序结果:精度1e-4时,解x'[3]=0.1250 0.4000 -0.6000 10.2500 0.3150 -0.4950 20.2262 0.3005 -0.4870 30.2234 0.3061 -0.4947 40.2251 0.3058 -0.4941 50.2250 0.3056 -0.4938 60.2249 0.3056 -0.4939 70.2249 0.3056 -0.4939 82.程序:#include<math.h>#include<stdio.h>int main(){int n=3,i,k,j,mm=1000;//最大迭代次数;float t,x[mm][n],dx[n],dx_max=1,err=1e-4;//精度for(i=0;i<n;i++)x[0][i]=0;float a[3][3]={8,-1,1,2,10,-1,1,1,-5};float b[3]={1,4,3};for(i=0;i<n;i++){b[i]=b[i]/a[i][i];}for(i=0;i<n;i++){for(j=0;j<n;j++)if(j!=i)a[i][j]=a[i][j]/a[i][i];a[i][i]=0;}printf("精度1e-4时,解x'[%d]=\n",n);for(k=0;dx_max>1e-8;k++){dx_max=0;for(i=0;i<n;i++){if(i==0){t=0;for(j=i+1;j<n;j++)t+=a[i][j]*x[k][j];x[k+1][i]=b[i]-t;}else{t=0;for(j=0;j<=i-1;j++)t+=a[i][j]*x[k+1][j];for(j=i+1;j<n;j++)t+=a[i][j]*x[k][j];x[k+1][i]=b[i]-t;}printf("%0.4f ",x[k+1][i]);dx[i]=x[k+1][i]-x[k][i];dx_max+=pow(dx[i],2);}printf("\n");} printf("\n");}程序结果:精度1e-4时,解x'[3]=0.1250 0.3750 -0.50000.2344 0.3031 -0.49250.2245 0.3059 -0.49390.2250 0.3056 -0.49390.2249 0.3056 -0.49393.Jacobi迭代法程序:#include<math.h>#include<stdio.h>int main(){int n=6,i,k,j,mm=1000;//最大迭代次数;float t,x[mm][n],dx[n],dx_max=1,err=1e-5;//精度for(i=0;i<n;i++)x[0][i]=0;float a[6][6]={4,-1,0,-1,0,0,-1,4,-1,0,-1,0,0 ,-1 ,4 ,0 ,0 ,-1,-1, 0, 0 ,4 ,-1 ,0, 0 ,-1 ,0 ,-1, 4 ,-1,0 ,0 ,-1, 0, -1 ,4};float b[6]={0 ,5 ,0 ,6 ,-2, 6};for(i=0;i<n;i++){b[i]=b[i]/a[i][i];}for(i=0;i<n;i++){for(j=0;j<n;j++)if(j!=i)a[i][j]=a[i][j]/a[i][i];a[i][i]=0;}printf("精度1e-4时,解x'[%d]=\n",n);for(k=0;dx_max>pow(err,2);k++){dx_max=0;for(i=0;i<n;i++){t=0;for(j=0;j<n;j++)t+=a[i][j]*x[k][j];x[k+1][i]=b[i]-t;printf("%0.4f ",x[k+1][i]);dx[i]=x[k+1][i]-x[k][i];dx_max+=pow(dx[i],2);}printf(" %d",k+1);printf("\n");} printf("\n");}程序结果:a的对角变0处理后的(a[6][6],b[6])=0.0000 -0.2500 0.0000 -0.2500 0.0000 0.0000 0.0000 -0.2500 0.0000 -0.2500 0.0000 -0.2500 0.0000 1.2500 0.0000 -0.2500 0.0000 0.0000 0.0000 -0.2500 0.0000 -0.2500 0.0000 0.0000 0.0000 -0.2500 0.0000 1.5000 0.0000 -0.2500 0.0000 -0.2500 0.0000 -0.2500 -0.5000 0.0000 0.0000 -0.2500 0.0000 -0.2500 0.0000 1.5000 精度1e-005时,解x'[6]=0.0000 1.2500 0.0000 1.5000 -0.5000 1.5000 1 0.6875 1.1250 0.6875 1.3750 0.5625 1.3750 20.6250 1.7344 0.6250 1.8125 0.4688 1.8125 30.8867 1.6797 0.8867 1.7734 0.8398 1.7734 40.8633 1.9033 0.8633 1.9316 0.8066 1.9316 50.9587 1.8833 0.9587 1.9175 0.9417 1.9175 60.9502 1.9648 0.9502 1.9751 0.9296 1.9751 70.9850 1.9575 0.9850 1.9699 0.9787 1.9699 80.9819 1.9872 0.9819 1.9909 0.9743 1.9909 90.9945 1.9845 0.9945 1.9890 0.9923 1.9890 100.9934 1.9953 0.9934 1.9967 0.9907 1.9967 110.9980 1.9944 0.9980 1.9960 0.9972 1.9960 120.9976 1.9983 0.9976 1.9988 0.9966 1.9988 130.9993 1.9979 0.9993 1.9985 0.9990 1.9985 140.9991 1.9994 0.9991 1.9996 0.9988 1.9996 150.9997 1.9993 0.9997 1.9995 0.9996 1.9995 160.9997 1.9998 0.9997 1.9998 0.9995 1.9998 170.9999 1.9997 0.9999 1.9998 0.9999 1.9998 180.9999 1.9999 0.9999 1.9999 0.9998 1.9999 191.0000 1.9999 1.0000 1.9999 1.0000 1.9999 201.00002.0000 1.0000 2.0000 0.9999 2.0000 211.00002.0000 1.0000 2.0000 1.0000 2.0000 221.00002.0000 1.0000 2.0000 1.0000 2.0000 231.00002.0000 1.0000 2.0000 1.0000 2.0000 241.00002.0000 1.0000 2.0000 1.0000 2.0000 25Gauss-Seidel迭代法程序:#include<math.h>#include<stdio.h>int main(){int n=6,i,k,j,mm=25;//最大迭代次数;float t,x[mm][n],dx[n],dx_max=1,err=1e-5;//精度for(i=0;i<n;i++)x[0][i]=0;float a[6][6]={4,-1,0,-1,0,0,-1,4,-1,0,-1,0,0 ,-1 ,4 ,0 ,0 ,-1,-1, 0, 0 ,4 ,-1 ,0, 0 ,-1 ,0 ,-1, 4 ,-1,0 ,0 ,-1, 0, -1 ,4};float b[6]={0 ,5 ,0 ,6 ,-2, 6};for(i=0;i<n;i++){b[i]=b[i]/a[i][i];}for(i=0;i<n;i++){for(j=0;j<n;j++)if(j!=i)a[i][j]=a[i][j]/a[i][i];a[i][i]=0;}printf("精度1e-4时,解x'[%d]=\n",n);for(k=0;dx_max>pow(err,2)&&k<mm;k++){dx_max=0;for(i=0;i<n;i++){if(i==0){t=0;for(j=i+1;j<n;j++)t+=a[i][j]*x[k][j];x[k+1][i]=b[i]-t;}else{t=0;for(j=0;j<=i-1;j++)t+=a[i][j]*x[k+1][j];for(j=i+1;j<n;j++)t+=a[i][j]*x[k][j];x[k+1][i]=b[i]-t;}printf("%0.4f ",x[k+1][i]);dx[i]=x[k+1][i]-x[k][i];dx_max+=pow(dx[i],2);}printf(" %d\n",k+1);} printf("\n");}程序结果:a对角0化处理后的(a[6][6],b[6][1])=0.0000 -0.2500 0.0000 -0.2500 0.0000 0.0000 0.0000 -0.2500 0.0000 -0.2500 0.0000 -0.2500 0.0000 1.2500 0.0000 -0.2500 0.0000 0.0000 0.0000 -0.2500 0.0000 -0.2500 0.0000 0.0000 0.0000 -0.2500 0.0000 1.5000 0.0000 -0.2500 0.0000 -0.2500 0.0000 -0.2500 -0.50000.0000 0.0000 -0.2500 0.0000 -0.2500 0.0000 1.5000精度1e-005时,解x'[6]=0.0000 1.2500 0.3125 1.5000 0.1875 1.6250 1 0.6875 1.5469 0.7930 1.7188 0.7227 1.8789 2 0.8164 1.8330 0.9280 1.8848 0.8992 1.9568 3 0.9294 1.9391 0.9740 1.9572 0.9633 1.9843 4 0.9741 1.9778 0.9905 1.9843 0.9866 1.9943 5 0.9905 1.9919 0.9966 1.9943 0.9951 1.9979 6 0.9966 1.9971 0.9987 1.9979 0.9982 1.9992 7 0.9987 1.9989 0.9995 1.9992 0.9994 1.9997 8 0.9995 1.9996 0.9998 1.9997 0.9998 1.9999 9 0.9998 1.9999 0.9999 1.9999 0.9999 2.0000 100.9999 1.9999 1.0000 2.0000 1.0000 2.0000 111.00002.0000 1.0000 2.0000 1.0000 2.0000 12 1.0000 2.0000 1.0000 2.0000 1.0000 2.0000 13 1.0000 2.0000 1.0000 2.0000 1.0000 2.0000 14。
雅可比迭代法和高斯超松弛迭代
雅可比迭代法分量形式(63)式也可改写为
(64)
(64)式更方便于编程求解。
雅可比迭代法公式简单,迭代思路明确。每迭代一次只需计算n个方程的向量乘法,程序编制时需设二个数组分别存放xk和xk+1便可实现此迭代求解。
2、高斯-赛德尔(Gauss-seidel)迭代法
由雅可比迭代法可知,在计算xk+1的过程中,采用的都是上一迭代步的结果xk。考察其计算过程,显然在计算新分量xik+1时,已经计算得到了新的分量, 。有理由认为新计算出来的分量可能比上次迭代得到的分量有所改善。希望充分利用新计算出来的分量以提高迭代解法的效率,这就是高斯-赛德尔迭代法(简称G-S迭代法)对(64)式进行改变可以得到G-S迭代法的分 量形式
(75)
其中ω称为松弛因子。
式(75)是迭代公式(74)的一个改进,可以选择松弛因子ω加速迭代过程的收敛。 式(75)的分量形式为
(76)
若对上述改进的迭代公式,按高斯-赛德尔迭代法尽量利用最新迭代得到的分量的原则,又可得到新的迭代公式
(77)
当线性方程组的系数矩阵A具有非零主元(aii≠0,i=1,2,3,…n)的特点时,可 以得到主元为1的方程组形式
雅可比迭代法和高斯-赛德尔迭代法以及超松弛迭代
对于给定的方程 用下式逐步代入求近似解的方法称为迭代法。如xk(当 )的极限存在,此极限即方程组的真正解,此迭代法收敛,否则称迭代法收敛。
1、雅可比(Jacobi)迭代法
设有方程组
Ax=b (56)
其展开形式为
(57)
系数矩阵A为非奇异阵,且 (i=1-n)A可分解为
高斯-赛德尔迭代的矩阵形式可表达为
(69)
高斯-赛德尔迭代法每步迭代的计算量与雅可比迭代相当,但在计算机进行计算时,只需存放x一个数组。
Jacobi迭代法_Gauss-Seidel迭代法
Matlab线性方程组的迭代解法(Jacobi迭代法Gauss-Seidel迭代法)实验报告2008年11月09日星期日12:49Jacobi迭代法,并编写Matlab程序matlab程序按照算法(Jacobi迭代法)编写Matlab程序(Jacobi.m)function [x, k, index]=Jacobi(A, b, ep, it_max)%求解线性方程组的Jacobi迭代法,其中% A ---方程组的系数矩阵% b ---方程组的右端项% ep ---精度要求。
省缺为1e-5% it_max ---最大迭代次数,省缺为100% x ---方程组的解% k ---迭代次数% index --- index=1表示迭代收敛到指定要求;% index=0表示迭代失败if nargin <4 it_max=100; endif nargin <3 ep=1e-5; endn=length(A); k=0;x=zeros(n,1); y=zeros(n,1); index=1;while 1for i=1:ny(i)=b(i);for j=1:nif j~=iy(i)=y(i)-A(i,j)*x(j);endendif abs(A(i,i))<1e-10 | k==it_maxindex=0; return;endy(i)=y(i)/A(i,i);endif norm(y-x,inf)<epbreak;endx=y; k=k+1;end用Jacobi迭代法求方程组的解。
输入:A=[4 3 0;3 3 -1;0 -1 4];b=[24;30;-24];[x, k, index]=Jacobi(A, b, 1e-5, 100)输出:x =k =100index =Gauss-Seidel迭代法,并编写Matlab程序function [v,sN,vChain]=gaussSeidel(A,b,x0,errorBound,maxSp)%Gauss-Seidel迭代法求解线性方程组%A-系数矩阵b-右端向量x0-初始迭代点errorBound-近似精度maxSp-最大迭代次数%v-近似解sN-迭代次数vChain-迭代过程的所有值step=0;error=inf;s=size(A);D=zeros(s(1));vChain=zeros(15,3);%最多能记录15次迭代次数k=1;fx0=x0;for i=1:s(1)D(i,i)=A(i,i);end;L=-tril(A,-1);U=-triu(A,1);while error>=errorBound & step<maxSpx0=inv(D)*(L+U)*x0+inv(D)*b;vChain(k,:)=x0';k=k+1;error=norm(x0-fx0);fx0=x0;step=step+1;endv=x0;sN=step;用Gauss-Seidel迭代法求解上题的线性方程组,取。
用jacobi和gauss迭代法求解方程组_概述及说明解释

用jacobi和gauss迭代法求解方程组概述及说明解释1. 引言1.1 概述在科学计算和工程领域中,求解线性方程组是一个常见且重要的问题。
解决方程组的准确、高效求解方法对于实际应用具有重要意义。
本文将介绍两种常用的迭代法:Jacobi迭代法和Gauss迭代法,并通过实例分析来说明它们的使用情况。
1.2 文章结构本文共包含五个主要部分。
引言部分首先对文中内容进行概述,并介绍文章的结构。
接下来,将详细介绍Jacobi迭代法和Gauss迭代法的算法原理、实现步骤以及收敛性分析。
然后,通过具体案例分析,比较使用Jacobi方法和Gauss方法求解方程组的效果。
最后,在结论与展望部分总结并展望了该研究领域未来可能的发展方向。
1.3 目的本文旨在全面了解和掌握Jacobi迭代法和Gauss迭代法在求解线性方程组中的应用。
通过深入理解这两种方法的原理、步骤以及收敛性分析,读者可以对其优缺点、适用范围有更清晰的认识。
同时,通过实例分析的比较,读者可以更好地把握两种方法在实际问题中的应用情况。
最终,本文将为读者提供一个全面而深入的总结,并展望可能的未来研究方向。
以上是文章“1. 引言”部分的内容,希望对您的长文撰写有所帮助。
2. Jacobi迭代法:2.1 算法原理:Jacobi迭代法是一种用于求解线性方程组的迭代方法。
对于一个n阶线性方程组Ax=b,其中A为系数矩阵,x为未知数向量,b为常数向量。
Jacobi迭代法的基本思想是将方程组表示为两个部分:对角线和非对角线部分,然后通过不断迭代来逐渐逼近最终解。
具体而言,Jacobi迭代法的计算公式如下:(1) 对于第i个方程,其解x_i(k+1)的计算公式为:x_i(k+1) = (b_i - Σ(a_ij * x_j(k))) / a_ii其中,k表示迭代步骤的索引号。
(2) 不断重复第(1)步骤,直到收敛或达到预定的迭代次数。
2.2 实现步骤:实现Jacobi迭代法求解方程组的步骤如下:(1) 初始化未知向量x(0),可以选择零向量或任意初始估计值。
Jacobi 迭代法与Gauss-Seidel迭代法算法比较
Jacobi 迭代法与Gauss-Seidel迭代法算法比较目录1 引言 (1)1.1Jacobi迭代法 (2)1.2Gauss-Seidel迭代法 (2)1.3逐次超松弛(SOR)迭代法 (3)2算法分析 (3)3 结论 (5)4 附录程序 (5)参考文献 (8)Jacobi 迭代法与Gauss-Seidel 迭代法比较1 引言解线性方程组的方法分为直接法和迭代法,直接法是在没有舍入误差的假设下,能在预定的运算次数内求得精确解,而迭代法是构造一定的递推格式,产生逼近精确值的序列。
这两种方法各有优缺点,直接法普遍适用,但要求计算机有较大的存储量,迭代法要求的存储量较小,但必须在收敛性得以保证的情况下才能使用。
对于高阶方程组,如一些偏微分方程数值求解中出现的方程组,采用直接法计算代价比较高,迭代法则简单又实用,所以比较受工程人员青睐。
迭代法求解方程组就是构造一个无限的向量序列,使它的极限是方程组的解向量。
即使计算机过程是精确的,迭代法也不能通过有限次算术运算求得方程组的精确解,而只能逐步逼近它。
因此迭代法存在收敛性与精度控制的问题。
迭代法是常用于求解大型稀疏线性方程组(系数矩阵阶数较高且0元素较多),特别是某些偏微分方程离散化后得到的大型稀疏方程组的重要方法。
设n 元线性微分方程组b Ax = (1)的系数矩阵A 非奇异,右端向量0≠b ,因而方程组有唯一的非零解向量。
而对于这种线性方程组的近似解,前辈们发展研究了许多种有效的方法,有Jacobi 迭代法、Gauss —Seidel 迭代法,逐次超松弛迭代法(SOR 法),这几种迭代方法均属一阶线性定常迭代法,即若系数矩阵A 分解成两个矩阵N 和P 的差,即P N A -=;其中N 为可逆矩阵,线性方程组(1)化为:b x P N =-)(b Px Nx +=b N Px N x 11--+=可得到迭代方法的一般公式:d Gx xk k +=+))1(( (2)其中:P N G 1-=,b N d 1-=,对任取一向量)0(x 作为方程组的初始近似解,按递推公式产生一个向量序列)1(x ,)2(x ,...,)k x(,...,当k 足够大时,此序列就可以作为线性方程组的近似解。
雅可比和高斯塞德尔迭代法的区别
雅可比和高斯塞德尔迭代法的区别雅克比迭代法和高斯-塞德尔迭代法是求解线性方程组中的代数方程组的两种方法。
在理解它们的不同之前,我们需要先了解什么是线性方程组。
线性方程组就是一组包含线性方程的方程组,每一个方程都是由未知数的系数与其常数组成。
例如,下面的方程组就是一个线性方程组:2x + 3y - 4z = 10 -x + 5y + 6z = -8 7x - 2y + 3z = 12雅克比和高斯-塞德尔迭代法的目标都是,通过一系列计算,找到一组解决线性方程组的方程,即未知数的值。
以下是强调两种方法之间的差别:1. 速度为了求解线性方程组,迭代法被一般的大多数人视为一个慢的方法。
同样地,这两种迭代法都需要多个迭代才能收敛于正确的解。
虽然两种方法理论上可以达到完全相同的速度,但实际上高斯-塞德尔迭代法比雅克比快得多。
以一个例子为例,如果有一个15 x 15的矩阵和矩阵方程组,需要15次迭代才能解决它,那么高斯-塞德尔迭代法需要大约7.5次迭代;而雅各比迭代法需要15次迭代。
2. 精度一旦迭代完成,解必须精确地满足方程组。
高斯-塞德尔法具有比雅克比法更好的精度,因为高斯塞德尔法每个变量的新值都立即计算。
在雅克比迭代法中,所有变量的新值必须通过旧系数系数计算。
因此,即使在较小的系统中进行迭代,也带来较大的精度损失。
3. 存储雅克比迭代法与高斯-塞德尔迭代法的存储要求根据计算机和数据集合的大小而变化。
如果线性方程组具有较少的未知数,则两种方法都可以在计算机上存储。
但是如果方程有大量的未知数,那么高斯-塞德尔迭代法需要更少的存储空间。
总的来说,雅各比迭代法和高斯-塞德尔迭代法之间的差异并不是非常大。
这两种方法都是求解线性方程组的有点缩略的方法,它们是不断逼近正确解的过程。
无论是雅各比迭代法还是高斯-塞德尔迭代法,都是建立于同样的这个基本思路之上的:解个方程式过程是不断逼近,逼近的精度可以任意提高,这样最终解就越来越精确。
matlab Jacobi迭代法Gauss-seidel和SOR迭代

1.Jacobi迭代法例1 用jacobi迭代法求解代数线性代数方程组,保留四位有效数字(err=1e-4)其中A=[8 -1 1;2 10 -1;1 1 -5];b=[1 ;4; 3]。
解:编写jacobi迭代法的函数文件,保存为jacobi.mfunction [x,k]=jacobi(A,b,x0,eps,N)% 求解Ax=b;x0为初始列向量;eps为误差容限;N为最大迭代次数% 输出x为近似解;k为迭代次数n=length(A);x=zeros(n,1);for k=1:Nfor i=1:n―――――――endif norm(x-x0,inf)<eps % 迭代终止条件% if (max(abs(x-x0)))<epsbreak;endx0=x;end编写主程序如下format longclearA=[8 -1 1;2 10 -1;1 1 -5];b=[1 ;4; 3];x0=[0.125; 0.4 ;-0.6 ]; % x0为初始列向量N为最大迭代次数err=1e-4; % err为误差容限N=25; % N为最大迭代次数[x,k]=jacobi(A,b,x0,err,N)得到结果如下x =0.224923156250000.30561995000000-0.49388680000000k =62.Gauss-seidel迭代法例2 用Gauss-seidel迭代法求解代数线性代数方程组,保留四位有效数字(err=1e-4) 其中A=[8 -1 1;2 10 -1;1 1 -5];b=[1 ;4; 3]。
解:编写Gauss-seidel迭代法的函数文件,保存为gaus.mfunction [x,k]=gaus(A,b,x0,eps,N)% 求解Ax=b;x0为初始列向量;eps为误差容限;N为最大迭代次数% 输出x为近似解;k为迭代次数n=length(A);x=zeros(n,1);for k=1:Nfor i=1:n――――――endif norm(x-x0,inf)<eps % 迭代终止条件% if (max(abs(x-x0)))<epsbreak;endx0=x;end编写主程序如下format longclearA=[8 -1 1;2 10 -1;1 1 -5];b=[1 ;4; 3];x0=[0.125; 0.4 ;-0.6 ]; % x0为初始列向量N为最大迭代次数err=1e-4; % err为误差容限N=25; % N为最大迭代次数[x,k]=gaus(A,b,x0,err,N)输出结果为x =0.224939378906250.30562326171875-0.49388747187500k =53.SOR迭代法例3 用SOR迭代法求解代数线性代数方程组,松驰因子w=1.005,其中A=[8 -1 1;2 10 -1;1 1 -5];b=[1 ;4; 3]。
jacobi迭代公式
jacobi迭代公式Jacobi迭代公式是一种用于解线性方程组的迭代算法。
它在数值计算中被广泛应用,特别是在科学和工程领域。
本文将介绍Jacobi迭代公式的原理、应用和一些相关的注意事项。
我们来了解一下Jacobi迭代公式的原理。
假设有一个线性方程组Ax=b,其中A是一个n×n的矩阵,b是一个n维向量,x是我们要求解的未知向量。
Jacobi迭代公式的思想是将方程组中的每个未知量都表示为其他未知量的线性组合,然后通过迭代的方式逐步逼近最终的解。
具体来说,Jacobi迭代公式可以表示为:x_i^{(k+1)} = \frac{1}{a_{ii}}(b_i - \sum_{j=1, j\neq i}^{n}a_{ij}x_j^{(k)})其中,x_i^{(k+1)}表示第i个未知量在第k+1次迭代后的值,a_{ii}是矩阵A的第i行第i列元素,b_i是向量b的第i个元素,x_j^{(k)}是第j个未知量在第k次迭代后的值。
Jacobi迭代公式的应用非常广泛。
它可以用于解决各种科学和工程问题,包括电力系统、结构力学、流体力学等领域的建模和仿真。
通过迭代计算,可以得到线性方程组的解,从而解决实际问题。
然而,Jacobi迭代公式也有一些需要注意的地方。
首先,迭代的收敛性并不总是保证的。
在某些情况下,迭代可能会发散,即无法得到有效的解。
因此,在使用Jacobi迭代公式时,需要对迭代过程进行收敛性分析,并根据实际情况选择合适的迭代次数。
Jacobi迭代公式的计算复杂度相对较高。
每次迭代都需要计算矩阵A和向量b的乘积,并且需要进行大量的加减运算。
对于大规模的线性方程组,这将会导致计算时间较长。
为了提高计算效率,可以采用一些优化方法,如并行计算和矩阵分解等。
总结起来,Jacobi迭代公式是一种解线性方程组的迭代算法,通过逐步逼近未知量的值来求解方程组。
它在科学和工程领域有着广泛的应用,但需要注意迭代的收敛性和计算复杂度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二:迭代法求解方程组姓名:徐烨学号:08072105时间:2010-11-17一、实验目的利用jacobi 迭代法和gauss-seidei 迭代法求解线性方程组,利用newton 迭代法求解非线性方程组。
在求解过程中,利用这三种方法的迭代原理,根据迭代法的求解流程,写出三种迭代法的迭代格式,学习三种迭代法的原理和解题步骤,并使用matlab 软件求解方程。
在实验过程中,分别取不同的初值进行求解,并做结果分析,解怒同德方程来比较这三种迭代方法的利弊。
二、实验步骤newton 迭代法⒈newton 迭代原理考虑非线性方程f(x)=0,求解她的困难在于f 是非线性函数。
为克服这一困难,考虑它的线性展开。
设当前点为Xk, 在Xk 处的Taylor 展开式为f ()x ≈f ()()()k k k x x x f x -'+令上式右端为0.解其方程得到()()k k k k x f x f x x '-=+1 ⋅⋅⋅=1,0k 此式就称为Newton 公式。
2. newton 迭代法的matlab 实现function x=newton(fname,dfname,x0,e,N)%用途:牛顿迭代法解非线性方程组分f(x)=0%fname 和dfname 分别表示f(x)及其到函数的M 函数句柄或内嵌函数的表达式%x0为迭代初值,e 为精度%x 为返回数值解,并显示计算过程,设置迭代次数上线N 以防发散if nargin<5,N=500;endif nargin<4,e=le-4;endx=x0;x0=x+2*e;k=0;fprintf('It.no=%2d x%[2d]=%12.9f\n',k,k,x)while abs(x0-x)>e&k<Nk=k+1;x0=x;x=x0-feval(fname,x0)/feval(dfname,x0);fprintf('It.no=%2d x[%2d]=%12.9f\n',k,k,x) endif k==N,fprintf('已达到迭代次数上限');end在试验中,我用这种方法求f(x)=x3-3*x-1=0的解①初值为2时,新建一个文件,输入:fun=inline('x^3-3*x-1');dfun=inline('3*x^2-3');x=newton(fun,dfun,2,0.5e-6)即可得此方程的解为:It.no= 0 xIt.no= 1 x[ 1]= 1.888888889It.no= 2 x[ 2]= 1.879451567It.no= 3 x[ 3]= 1.879385245It.no= 4 x[ 4]= 1.879385242x =1.879385241571817e+000②初值为5时,新建一个文件,输入:fun=inline('x^3-3*x-1');dfun=inline('3*x^2-3');x=newton(fun,dfun,5,0.5e-6)即可得此方程的解为:It.no= 0 xIt.no= 1 x[ 1]= 3.486111111It.no= 2 x[ 2]= 2.562343095It.no= 3 x[ 3]= 2.075046554It.no= 4 x[ 4]= 1.902660228It.no= 5 x[ 5]= 1.879777024It.no= 6 x[ 6]= 1.879385355It.no= 7 x[ 7]= 1.879385242x =1.879385241571826e+000③初值为8时,新建一个文件,输入:fun=inline('x^3-3*x-1');dfun=inline('3*x^2-3');x=newton(fun,dfun,8,0.5e-6)即可得此方程的解为:It.no= 0 xIt.no= 1 x[ 1]= 5.423280423It.no= 2 x[ 2]= 3.754505841It.no= 3 x[ 3]= 2.719579123It.no= 4 x[ 4]= 2.148629510It.no= 5 x[ 5]= 1.920654127It.no= 6 x[ 6]= 1.880593045It.no= 7 x[ 7]= 1.879386323It.no= 8 x[ 8]= 1.879385242It.no= 9 x[ 9]= 1.879385242x =1.879385241571817e+000gauss-seidel 实验过程1.gauss-seidel 迭代原理将方程组Ax=b (设n i a n ,2,1;0⋅⋅⋅=≠)化成等价方程组:)(1∑≠-=ij j i i i i x a b a x j i ),2,1(n i ⋅⋅⋅= 采用迭代格式: ⎪⎪⎭⎫ ⎝⎛--=∑∑-=+=++111111i j ni j k j ij k j ij i ij k i x a x a b a x ()n i ⋅⋅⋅⋅=,2,1 2.gauss-seidel 迭代法的matlab 实现function x=jacobi(A,b,x0,emg,N)% A 是线性方程组的系数矩阵% b 是值向量% x0是迭代初始向量% N 是迭代上限,诺迭代次数大于>N,则迭代失败% emg 是控制精度% 用gauss-seidei 迭代法求解线性方程组Ax=b 的解%k 表示迭代次数%x 表示用迭代法求得的解线性方程组的近似解if nargin<5N=500;else N=N;endn=length(b);x1=zeros(n,1);x2=zeros(n,1);x1=x0;k=0;r=max(abs(b-A*x1));while r>emgfor i=1:nsum=0;for j=1:nif i~=jsum=sum+A(i,j)*x1(j);endendx2(i)=(b(i)-sum)/A(i,i);endr=max(abs(x2-x1));x1=x2;k=k+1;if k>Nwarning('迭代次数达到上限!');return;endendx=x1;在试验中,我用此方法求①A1=922282217 ,b=6810的线性方程组的解新建一个文件,输入:A=[7 1 2;2 8 2;2 2 9];b=[10 8 6]';x0=[0 0 0]';emg=10^(-6);x=gaussseidel(A,b,x0,emg)可得此方程的解为:x =1.269406363593758e+0006.210045136516440e-0012.465753606121330e-001改变此初值为x0=[1 2 3]’时,可得此方程的解为:x =1.269406358870516e+0006.210045989420114e-0012.465753427083272e-001②A2=32-1-1-102-2-2-10 ,b=15.01的线性方程组的解 新建一个文件,输入:A=[10 -2 -2;-2 10 -1;-1 -2 3];b=[10 8 6]';x0=[0 0 0]';emg=10^(-6);x=gaussseidel(A,b,x0,emg)即可得此方程的解为:x =2.067226785332675e+0001.588235242744889e+0003.747899090274151e+000改变此初值为x0=[4 5 6]’时,可得此方程的解为:x =2.067226982320636e+0001.588235338736795e+0003.747899219931409e+000jacobi 迭代法的实验过程1.jacobi 迭代原理将方程组Ax=b (设n i a n ,2,1;0⋅⋅⋅=≠)化成等价方程组:)(1∑≠-=ij j i i i i x a b a x j i ),2,1(n i ⋅⋅⋅= 采用迭代格式: ⎪⎪⎭⎫ ⎝⎛-=∑≠+111j k j ij i iik i x a b a x ()n i ⋅⋅⋅=,2,1 2.Jacobi 迭代法的matlab 实现function x=jacobi(A,b,x0,emg,N)% A 是线性方程组的系数矩阵% b 是值向量% x0是迭代初始向量% N 是迭代上限,诺迭代次数大于>N,则迭代失败% emg 是控制精度% 用jacobi 迭代法求解线性方程组Ax=b 的解%k 表示迭代次数%x 表示用迭代法求得的解线性方程组的近似解if nargin<5N=500;else N=N;endn=length(b);x1=zeros(n,1);x2=zeros(n,1);x1=x0;k=0;r=max(abs(b-A*x1));while r>emgfor i=1:nsum=0;for j=1:nif i~=jsum=sum+A(i,j)*x1(j);endendx2(i)=(b(i)-sum)/A(i,i);endr=max(abs(x2-x1));x1=x2;k=k+1;if k>Nwarning('迭代次数达到上限!');return;endendx=x1;在实验中,我用此方法求①A1=922282217 ,b=6810的线性方程组的解,这样可以比这两种方法的优越性新建一个文件,输入:A=[7 1 2;2 8 2;2 2 9];b=[10 8 6]';x0=[0 0 0]';emg=10^(-6);x=jacobi(A,b,x0,emg)即可得此方程的解为:x=1.269406606540146e+0006.210048051684348e-0012.465755635845312e-001改变此初值为x0=[1 2 3]’时,可得此方程的解为:x =1.269406576962693e+0006.210047721178078e-0012.465755330013612e-001②A2=32-1-1-102-2-2-10 ,b=15.01的线性方程组的解 新建一个文件,输入:A=[10 -2 -2;-2 10 -1;-1 -2 3];b=[10 8 6]';x0=[0 0 0]';emg=10^(-6);x=jacobi (A,b,x0,emg)即可得此方程的解为:x =2.067226548410933e+0001.588235036073759e+0003.747898577034409e+000改变此初值为x0=[4 5 6]’时,可得此方程的解为:x =2.067227297951090e+0001.588235601041707e+0003.747899852657807e+000三、实验分析由Jacobi 的迭代公式可以看到,在计算机上使用该法线性方程组时,x(m)分量必须保存到x(m+1)的分量全部复出后才不再需要。