adams路面文件
基于ADAMS的汽车脉冲路面仿真

基于ADAMS的汽车脉冲路面仿真宋年秀; 刘亚光; 张丽霞【期刊名称】《《汽车零部件》》【年(卷),期】2019(000)009【总页数】4页(P1-4)【关键词】脉冲路面; 脉冲输入; 平顺性【作者】宋年秀; 刘亚光; 张丽霞【作者单位】青岛理工大学机械与汽车工程学院山东青岛266033【正文语种】中文【中图分类】U270.20 引言汽车在道路上行驶时难免会遇到诸如减速带、凹坑、凸块等各种不平工况,当汽车通过这些障碍时,轮胎传至驾驶员座椅处的振动加速度会发生较大的波动。
为了将这种行驶工况考虑在内,通常情况下采用长为400 mm的三角形单凸块[1]。
根据试验条件不同,脉冲输入可用相应高度的凸块或减速带,而并未对为何使用三角形凸块或是减速带进行阐述。
针对国家标准GB/T 4970-2009[2]所提出的对路面脉冲激励的评价方法进行仿真分析。
首先基于ADAMS/Car,利用某普及型轿车的相关参数,建立包括悬架、车身、轮胎、转向系统在内的整车系统,对各车速下的包括:矩形凸块、斜角凸块、凹坑、减速带在内的6种脉冲输入进行平顺性仿真,并对仿真结果进行分析比较,得到更适宜作为脉冲输入的脉冲轮廓类型。
最后,在脉冲路面的仿真过程中,将随机路面考虑在内,使平顺性仿真更加符合实际工况。
1 整车模型的建立通过对该轿车的测量以及对其相关参数进行查询,得到了整车的主要参数,如表1所示。
在ADAMS/Car中,根据得到的相关参数建立各个子系统的模型,最后将其组装成整车模型并进行平顺性分析。
本文作者选用轿车的前后悬架分别为双横臂独立悬架以及多连杆悬架,对其进行建模得到如图1和图2所示的悬架模型,最终对各子系统进行装配得到如图3所示的轿车整车模型。
表1 整车主要参数参数数值整车整备质量/kg1 360底盘质心高度/mm560质心距前轴距/mm1 125质心距后轴距/mm1 450车身绕横轴转动惯量/(kg·mm2)6.2×108车身绕纵轴转动惯量/(kg·mm2)2.0×108前悬架垂直刚度/(N·mm-1)31前悬架阻尼系数/(N·s·mm-1)2.8后悬架垂直刚度/(N·mm-1)26后悬架阻尼系数/(N·s·mm-1)2.5前轮距/mm1 432后轮距/mm1 220前后轴距/mm2 631轮胎规格225/55R17图1 双横臂独立悬架图2 多连杆悬架图3 整车模型2 脉冲输入仿真2.1 脉冲输入的建立利用ADAMS/Car对汽车通过脉冲路面的振动进行分析时,可以使用插件Road Builder对脉冲路面进行3D建模,也可以使用后缀名为.rdf的TeimOrbit格式路面文件进行2D或3D路面的创建。
汽车平顺性仿真中路面文件生成方法
汽车平顺性仿真中路面文件生成方法
于景飞
【期刊名称】《交通科技与经济》
【年(卷),期】2010(012)006
【摘要】在ADAMS/View中进行汽车平顺性仿真,需要根据不同的实验方法建立相应的路面文件,构造满足仿真要求的路面是该任务的一大难点.探讨在ADAMS仿真中生成各种路面文件的一些方法,生成常用车速下的路面文件,结合整车模型,对生成路面进行验证,仿真结果表明生成方法的可行性及生成路面的正确性.
【总页数】3页(P107-109)
【作者】于景飞
【作者单位】内蒙古科技大学建筑与土木工程学院,内蒙古包头014010
【正文语种】中文
【中图分类】U46
【相关文献】
1.基于ADAMS/Car微型观光电动汽车典型路面平顺性仿真 [J], 乔长胜;李耀刚;琚立颖;冯泽;张文明;
2.碎石路面上汽车平顺性仿真分析 [J], 袁绍华;王昆;王曙光;黄波
3.路面减速带对汽车平顺性和安全性影响的仿真与试验研究 [J], 任成龙;徐慧宝
4.随机路面输入对汽车平顺性的仿真分析 [J], 熊金胜;王天利;张健;章桂林
5.基于虚拟路面的汽车平顺性仿真分析 [J], 刘彪;叶昊;段敏;陈志强;沈澳;郑福民
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ADAMS的三维虚拟道路的再现
基于ADAMS的三维虚拟道路的再现朱茂桃;严金霞;王国林;高翔【摘要】针对ADAMS仿真软件,提出了三维虚拟道路模型的再现方法和适用于Ftire模型的规则栅格的组合道路的建模方法.利用采集的实际道路不平度的高程数据,结合ADAMS路面文件的编制格式,应用MATLAB语言编写了3D等效容积路面、3D样条道路及细合道路文件,真实的再现了三维虚拟道路.通过对车辆模型在这三种不同道路上的仿真,结果验证了三种道路模型的正确性,表明了组合道路在ADAMS环境中具有良好的可行性.三维虚拟道路的再现为今后道路谱数据库的建立提供了一种行之有效的方法.【期刊名称】《机械设计与制造》【年(卷),期】2010(000)006【总页数】3页(P171-173)【关键词】再现;ADAMS;三维虚拟道路;规则栅格【作者】朱茂桃;严金霞;王国林;高翔【作者单位】江苏大学汽车与交通工程学院,镇江,212013;江苏大学汽车与交通工程学院,镇江,212013;江苏大学汽车与交通工程学院,镇江,212013;江苏大学汽车与交通工程学院,镇江,212013【正文语种】中文【中图分类】TH112.1;TH113.11 前言近年来,随着力学、计算数学、计算机技术及其它相关技术的发展,人们已经能建立复杂、精确的车辆动力学模型。
同时,在提高仿真精度和扩大仿真功能方面也做了大量的研究,并取得很多成果。
汽车在行驶过程中,路面激励对其主要行驶性能有着直接的影响。
因此,在用车辆模型模拟实际驾驶条件下的车辆的仿真分析中,如何在软件中真实的再现三维虚拟道路就成为模拟的关键问题之一。
利用采集的实际道路不平度的高程数据,实现了基于ADAMS 软件的三维虚拟道路的再现。
2 三维虚拟道路的再现采用激光传感器和垂直加速度传感器组合成的惯性参照道路纵断面剖面检测系统,检测仪整体外观,如图1 所示。
图1 检测仪整体和检测传感器箱体外观照多功能激光路面检测仪是本测量采集系统的核心,它主要完成对道路起伏状况的采集处理和计算,其结构,如图2 所示。
路面文件的生成

第3章路面文件的生成3.1 随机路面不平度的拟合理论[4][5][17][18][39]大量的测量分析结果表明,路面不平度具有随机、平稳和各态历经的特性,可以用平稳随机过程理论来分析描述。
通常把道路垂直纵断面与道路表面的交线作为路面不平度的样本,通过样本的数学特征――方差或功率谱密度函数来描述路面。
均值为零时,方差可以反映路面不平度大小的总体情况;功率谱密度函数能够表示路面不平度能量在空间频域的分布,它说明了路面不平度或者说路面波的结构。
当功率谱密度用坐标图表示时,坐标上功率谱密度曲线下的面积就是路面不平度方差。
从功率谱密度函数不仅能了解路面不平度的结构,还能反映出路面的总体特征。
因此,功率谱密度函数(PSD)是路面不平度的最重要数学特征。
文献[17、39]介绍了采用多种方法生成路面不平度的时域模型,如:滤波白噪声生成法(线性滤波法),基于有理函数PSD模型的离散时间随机序列生成法,根据随机信号的分解性质所推演的谐波叠加法(也称频谱表示法),以及基于幂函数功率谱的快速Fourier反变换生成法等。
白噪声激励模拟的基本思想是:将路面高程的随机波动抽象为满足一定条件的白噪声, 然后经一假定系统进行适当变换而拟合出路面随机不平度的时域模型。
离散时间随机序列生成法的基本思想是:基于Parkhilovsk ii 提出的另一种有理函数形式的功率谱密度表达式[17],建立路面不平度时间离散化模拟的递推公式[17]。
谐波叠加法的基本思想是:随机正弦波(或其他谐波)叠加法采用以离散谱逼近目标随机过程的模型, 是另一种离散化数值模拟路面的方法。
基于幂函数功率谱的快速Fourier反变换生成法的基本思想是:由功率谱密度的离散采样构造出频谱, 然后对频谱进行Fourier逆变换得到时域模拟的轨道不平顺激励函数。
但是,不管是标准道路谱还是实测道路谱,其PSD 是路面不平度的一个统计量。
因此,对应于测量范围内某一种确定的路面不平度,其PSD 是唯一的;但对于给定的PSD ,其模拟设计的路面不平度并不唯一,也就是说频域模型和时域模型并非一对一的映射,因此从频域模型所得的路面不平度的时域模型只能看成是满足给定路谱的全部可能的路面不平度中的一个样本函数。
ADAMS-Car路面生成技术总结

如果仅以基本行驶模型分析为目的,通常不考虑断点的影响,采用单斜率路面输入谱基本上就 可满足要求。假设不平度系数 G0 按下表取值,则斜率 p 通常取 2~2.5 为宜。
各种典型路面的不平度系数 G0 值 单位:m3/cycle 路面类型 高速公路 主干道 支路 范围 3×10-8~5×10-7 3×10-8~8×10-6 5×10-7~3×10-5 均值 1×10-7 5×10-7 5×10-6
w
G( j)
Zg
随机滤波白噪声表达的路面功率谱密度为:
S ( f ) G0
u 2 G( f ) 2 2 f
Z g G ( j ) w
式中, 2 为随机白噪声 w 的方差,取值为 1; Z g 为路面不平度位移。 若以圆周率 (单位为 rad/s)表示,上式则要改为:
S ( )
式中, nd 为双对数坐标下谱密度曲线断点处的空间频率。 实际上,上式仍有与实际情况不符之处,比如在空间频率趋向零时,所表达的路面输入振幅将 趋向无穷大,而实际路面并非如此,从实测的路面谱中也可看出,路面谱密度 S 的值在低频段趋向 平坦。基于这点考虑,可引入一个下截止频率 n0 ,即当频率低于 n0 时,谱密度幅值保持恒定。在极
倍频带 1/3 倍频带 1/12 倍频带 从最低频带(零频率除外)到中心频率 0.0312m-1 从倍频带的末尾值到中心频率 0.25-1 从 0.2726m-1 到最高计算频率
在规定的带宽内对功率谱密度进行平均计算,其光滑计算公式为:
nH 1
[(n 0.5) Be nl (i )]S (nL ) S (i ) L nh (i) nl (i )
由此可得到:
2 S (f ) 2 G0u 2 G ( ) 2 2 2
ADAMS路面
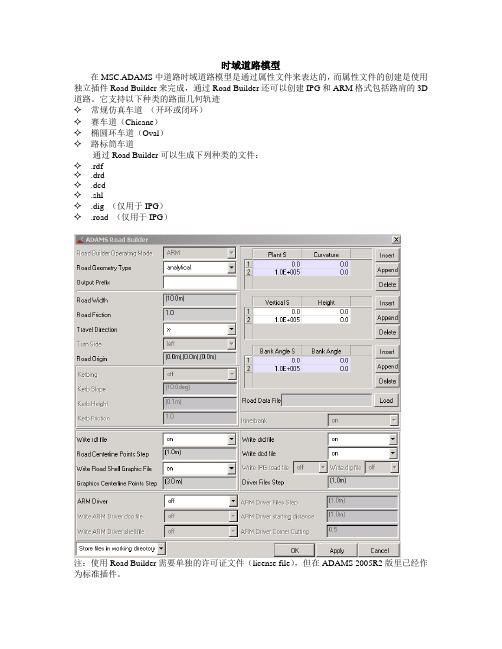
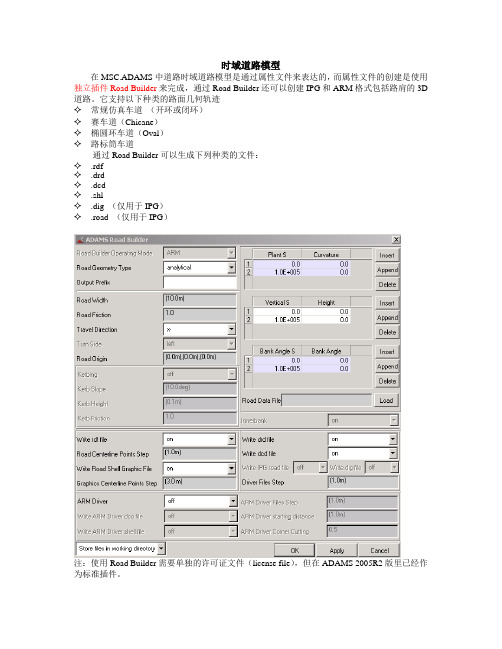
时域道路模型在MSC.ADAMS中道路时域道路模型是通过属性文件来表达的,而属性文件的创建是使用独立插件Road Builder来完成,通过Road Builder还可以创建IPG和ARM格式包括路肩的3D 道路。
它支持以下种类的路面几何轨迹✧常规仿真车道(开环或闭环)✧赛车道(Chicane)✧椭圆环车道(Oval)✧路标筒车道通过Road Builder可以生成下列种类的文件:✧.rdf✧.drd✧.dcd✧.shl✧.dig (仅用于IPG)✧.road (仅用于IPG)注:使用Road Builder需要单独的许可证文件(license file),但在ADAMS 2005R2版里已经作为标准插件。
在ADAMS里路面模型是通过后缀名为.rdf的路面文件引入到仿真环境中,路面文件的结构仍然是TeimOrbit格式的ASCII文本文件。
例如在操纵性仿真中常用的平整路面文件有:在路面文件中的标题数据块、单位数据块的定义方式与DCF、DCD文件一样,[MODEL]数据块定义路面的类型,[GRAPHICS]数据块定义路面几何图形,注意,在2D道路中只有平整路面Flat才有路面图形;其他类型的路面可以通过专用软件包FTire-tools提供的road visualization功能观察路面形状(另一种方法是用函数构造器下的create_shell_from_rdf函数将路面文件转化为shell文件,再将shell壳文件加入到模型中);[PARAMETERS]数据块定义路面的如摩擦系数、几何形态等参数。
道路类型:道路的类型在TeimOrbit格式的道路属性文件中通过[MODEL]数据块中的METHOD、ROAD_TYPE语句定义,[MODEL]数据块定义的常用道路类型如下:[FUNCTION_NAME]函数名称变量指路面与轮胎接触函数ID 号2D 道路文件MTTHOD =2D 时二维路面的参数[PARAMETERS]子数据块:参数子数据块[PARAMETERS]的结构根据路面类型的不同而不同,基本上可以划分为3隔部分:通用参数段、路型参数段和数据组,用符号$分开。
标准路面激励下的车轮动态负载分析
标准路面激励下的车轮动态负载分析李能; 刘春光; 燕玉林【期刊名称】《《机械设计与制造》》【年(卷),期】2019(000)008【总页数】4页(P41-44)【关键词】ADAMS; 动力学; 随机路面; 动态负载【作者】李能; 刘春光; 燕玉林【作者单位】装甲兵工程学院控制工程系北京 100072【正文语种】中文【中图分类】TH16; TJ8111 引言车辆匀速驶过平直路面会产生恒定轮胎力,由于实际道路表面形状不规则,导致轮胎受力波动,产生连续变化负载[1]。
动态负载易造成轮轴疲劳损伤,同时影响轮毂电机寿命。
因此,研究确定车轮动态负载对电机选择和车辆结构优化有重要意义。
当前有关动态负载研究,大多针对车辆部件疲劳损伤的载荷谱[2-3]。
载荷谱属于统计数据,不能实时反映车辆位置与车轮负载的关系。
道路重构技术大多采用MATLAB软件编程,过程繁琐,程序复杂。
基于ADAMS软件搭建整车动力学模型[4],构建等级路面,研究直驶工况下不同路面与车速对车轮动态负载的影响。
2 车—路系统动力学模型2.1 整车模型搭建研究对象是包含多个精细结构的复杂系统,为简化模型只对车轮负载产生主要影响的部件建模,主要包括车身、悬架、双桥转向系统、轮胎模型。
车辆的主要技术参数,如表1所示。
车辆坐标系定义,如图1(a)所示。
X轴—车辆前进的方向,向后为正;Y轴—车身的侧向方向,指向车身右侧为正;Z轴—垂直于地面的方向,向上为正,Z轴的负方向—重力加速度的方向。
表1 整车基本性能参数Tab.1 Basic Performance Parameters项目数值车长(mm) 7 873车宽(mm) 2 936车高(至顶甲板/炮塔顶端)(mm) 2125/2 688一桥轮距(mm) 2 600二桥轮距(mm) 2 600三桥轮距(mm) 2 600四桥轮距(mm) 2 600轮胎半径(mm) 615整车质量(kg) 23 000图1 车-路系统动力学模型Fig.1 Dynamics Model of Vehicle-Road System车身是根据实车质量和转动惯量构建3D刚体模型。
Matlab实现ADAMS三维随机路面建模
Matlab实现ADAMS三维随机路面建模黄志强;郑旺辉【摘要】根据谐波叠加法得到二维随机路面谱,通过改进的谐波叠加法将二维路面谱扩展到三维,形成三维随机路面谱的建模方法.详解了ADAMS中三维随机路面文件的编制规则,通过Matlab编程计算出路面文件中的路面点高程值阵列,生成ADAMS三维随机路面模型文件,仿真计算过程表明路面可用于仿真计算研究.【期刊名称】《现代防御技术》【年(卷),期】2018(046)003【总页数】6页(P165-170)【关键词】谐波叠加法;路面谱;三维路面;仿真;建模;模型文件【作者】黄志强;郑旺辉【作者单位】北京机械设备研究所,北京100854;北京机械设备研究所,北京100854【正文语种】中文【中图分类】TJ812;N945.120 引言随机路面中激励点的高程值变化可以用另一个词汇来表达:路面不平度。
路面不平度[1]定义为道路表面相对于理想平面的偏离,它描述了随机路面下车辆的振动输入。
同时,相较于车辆发动机等激励源,路面不平度是车辆振动系统的主要振源,在建立车辆系统整车数学或者仿真模型进行平顺性分析时,可以忽略发动机等激励源,而将路面不平度激励作为唯一的激励源施加在车上。
路面不平度通常用来描述路面的起伏程度[1]。
对路面谱的研究首先在于获取路面谱,最直接的方法就是测量,为此,研究者们发明了多种路面谱测量设备。
近年来,随着传感器技术、计算机技术和信号处理技术的飞速发展, 人们对路面不平度的采集、测量和各种试验方法也在不断的更新和改进[1],这一领域已经涌现出了多种测量和试验分析的新方法。
一般按照测量原理的不同可分为直接接触式测量仪和非接触式测量仪(响应式测量仪)等。
国内直接接触式测量仪的典型代表是1979年, 国内长春汽车研究所的赵继海等人发明的拖车式真实路形仪[1], 通过测量拖车上前后轮与拖臂等部件之间的角度变化来获得路面的真实路形。
在对一定道路的测量和分析研究中,学者们发现路面不平度虽然不能够用普通数学函数描述,但是其具有随机、平稳、各态历经的特征[1],这些特征在统计学意义上具有完整的理论描述方法,研究发现路面不平度可以用平稳随机过程理论来分析描述。
ADAMS轮胎模型简介
详细介绍轮胎模型,主要是自己做课题时,用到的整理汇总出来的,轮胎这部分的资料比较少的,记录下来帮助大家一起学习一起进步;主要分以下两部分介绍一、轮胎模型简介轮胎是汽车重要的部件,它的结构参数和力学特性决定着汽车的主要行驶性能。
轮胎所受的垂直力、纵向力、侧向力和回正力矩对汽车的平顺性、操纵稳定性和安全性起重要作用。
轮胎模型对车辆动力学仿真技术的发展及仿真计算结果有很大影响,轮胎模型的精度必须与车辆模型精度相匹配。
因此,选用轮胎模型是至关重要的。
由于轮胎具有结构的复杂性和力学性能的非线性,选择符合实际又便于使用的轮胎模型是建立虚拟样车模型的关键。
一、轮胎模型简介轮胎建模的方法分为三种:1)经验—半经验模型针对具体轮胎的某一具体特性。
目前广泛应用的有 Magic Formula公式和吉林大学郭孔辉院士利用指数函数建立的描述轮胎六分力特性的统一轮胎半经验模型UniTire ,其主要用于车辆的操纵动力学的研究。
2)物理模型根据轮胎的力学特性,用物理结构去代替轮胎结构,用物理结构变形看作是轮胎的变形。
比较复杂的物理模型有梁、弦模型。
特点是具有解析表达式,能探讨轮胎特性的形成机理。
缺点是精确度较经验—半经验模型差,且梁、弦模型的计算较繁复。
3)有限元模型基于对轮胎结构的详细描述 , 包括几何和材料特性,精确的建模能较准确的计算出轮胎的稳态和动态响应。
但是其与地面的接触模型很复杂,占用计算机资源太大,在现阶段应用于不平路面的车辆动力学仿真还不现实,处于研究阶段。
主要用于轮胎的设计与制造二、 ADAMS/TIRE轮胎不是刚体也不是柔体,而是一组数学函数。
由于轮胎结构材料和力学性能的复杂性和非线性以及适用工况的多样性,目前还没有一个轮胎模型可适用于所有工况的仿真,每个轮胎模型都有优缺点和适用的范围。
必须根据需要选择合适的轮胎模型。
ADAMS/TIRE分为两大类:一) .用于操稳分析的轮胎模型魔术公式是用三角函数的组合公式拟合轮胎试验数据,用一套形式相同的公式完整地表达轮胎的纵向力、侧向力、回正力矩、翻转力矩、阻力矩以及纵向力、侧向力的联合作用工况,主要包括以下的前四种模型。
AdamsCar路面谱模型建立以及整车底盘部件载荷提
Adams/Car路面谱模型建立以及整车底盘部件载荷提取作者:Simwe 来源:MSC发布时间:2014-04-02 【收藏】【打印】复制连接【大中小】我来说两句:(0) 逛逛论坛利用MSC Adams虚拟样机技术,建立准确的路面模型、轮胎模型以及整车动力学模型,模拟试验场各种工况的分析,测量底盘关键部件的载荷谱,可以为改进结构设计的有限元强度、刚度分析提供边界元载荷条件,以及实现车辆开发过中车身与底盘关键零部件的疲劳寿命预测。
MSC Adams虚拟样机技术方法,最终实现在车辆前期设计阶段,根据用户使用工况来确定关键部件疲劳寿命预测的虚拟试验,并利用准确的部件载荷谱,快速做出零部件可靠性的分析判断;降低开发费用,缩短开发周期,使汽车的设计真正符合用户的使用情况,大大提高汽车设计开发水平以及企业核心竞争力。
一、建立2D路面模型Adams中二维路面的接触采用 point-follower 的方法,只用XZ平面上的点定义形成二维曲线,可以建立各种不同的路面类型:汽车主机厂通常会进行整车跨越三角形凸起路面工况,确认车辆行驶跨越突起路面时的前/后悬架系统、转向系统及车身受冲击受力(上下入力)强度的试验,此时就可以用二维路面描述建立路面模型。
各种不同形状的路面,通过在路面文件中定义各数据块参数完成定义,具体不同路面参数,如下图所示:上一页 1 23下一页二、3D等效容积路面建立3D 等效体积模型为三维的轮胎-路面接触模型,用来计算路面和轮胎之间交叉的体积。
路面是用一系列离散的三角形片来表示,而轮胎则用一系列的圆柱表示。
采用此路面模型,你可以模拟车辆在运动过程中碰到路边台阶、凹坑或在粗糙路面或不规则路面上运动的情形。
3D 等效体积路面模型为一般的三维表面,并用一系列的三角形片表示。
右侧的图表示一个由编号为 1 到 6 的六个节点构成的路表面。
六个节点共构成四个三角形的面单元,分别表示为 A、B、 C 和 D。
adams路面文件
时域道路模型在MSC.ADAMS中道路时域道路模型是通过属性文件来表达的,而属性文件的创建是使用独立插件Road Builder来完成,通过Road Builder还可以创建IPG和ARM格式包括路肩的3D 道路。
它支持以下种类的路面几何轨迹✧常规仿真车道(开环或闭环)✧赛车道(Chicane)✧椭圆环车道(Oval)✧路标筒车道通过Road Builder可以生成下列种类的文件:✧.rdf✧.drd✧.dcd✧.shl✧.dig (仅用于IPG)✧.road (仅用于IPG)注:使用Road Builder需要单独的许可证文件(license file),但在ADAMS 2005R2版里已经作为标准插件。
在ADAMS里路面模型是通过后缀名为.rdf的路面文件引入到仿真环境中,路面文件的结构仍然是TeimOrbit格式的ASCII文本文件。
例如在操纵性仿真中常用的平整路面文件有:在路面文件中的标题数据块、单位数据块的定义方式与DCF、DCD文件一样,[MODEL]数据块定义路面的类型,[GRAPHICS]数据块定义路面几何图形,注意,在2D道路中只有平整路面Flat才有路面图形;其他类型的路面可以通过专用软件包FTire-tools提供的road visualization功能观察路面形状(另一种方法是用函数构造器下的create_shell_from_rdf函数将路面文件转化为shell文件,再将shell壳文件加入到模型中);[PARAMETERS]数据块定义路面的如摩擦系数、几何形态等参数。
道路类型:道路的类型在TeimOrbit格式的道路属性文件中通过[MODEL]数据块中的METHOD、ROAD_TYPE语句定义,[MODEL]数据块定义的常用道路类型如下:METHOD FUNCTION_NAME ROAD_TYPE‘2D’二维路面‘ARC901’DRUM 轮胎转鼓试验台FLAT 平整路面PLANK 矩形凸块路POLY_LINE 折线路面POT_HOLE 凹坑路面RAMP 斜坡路面ROOF 三角形凸块路面SINE 正弦波路面SINE_SWEEP 正弦变波纹路面STOCHASTIC_UNEVEN 随机不平路面‘3D’‘ARC904’ /none 3D等效容积道路‘3D_SPLINE’'ARC903'/none 3D样条路面'5.2.1' 'ARC913' FLAT或INPUT 521轮胎模型专用路面‘USER’‘ARC501’自定义[FUNCTION_NAME]函数名称变量指路面与轮胎接触函数ID号2D道路文件MTTHOD=2D时二维路面的参数[PARAMETERS]子数据块:参数子数据块[PARAMETERS]的结构根据路面类型的不同而不同,基本上可以划分为3隔部分:通用参数段、路型参数段和数据组,用符号$分开。
ADAMS中三维虚拟路面的实现
[摘要 ] 提出一种在车辆虚拟样机动力学性能仿真分析中构建三维虚拟路面的方法 ,将路面节点连接问题简 化为投影平面内点集的不规则三角形网格连接 ,依据 delaunay算法进行求解 。由于对节点的分布无过多的限制 , 从而大大简化了虚拟样机动力学分析中路面的构建过程 ,可用于复杂试验路面的数字实现 。
2006年 (第 28卷 )第 2期
汽 车 工 程 Automotive Engineering
2006 (Vol. 28) No. 2
2006035
ADAM S中三维虚拟路面的现
程 超 1 ,王登峰 1 ,李承德 2
(11吉林大学汽车工程学院 ,长春 130025; 21中国第一汽车集团公司技术中心 ,长春 130011)
图 1 ADAM S软件中路面示意图
根据上述方法 ,用户很容易生成理想的水平路 面 ,也可以根据规则分布的节点之间的连接规律 ,编 制程序生成一些不太复杂的路面 [ 3 ] 。但在一般情 况下 ,复杂路面的节点是随机 、杂乱分布的 ,节点之 间的连接关系不能用规律性的关系来描述 ,计算无 规律分布的离散地面节点的连接关系是路面数字化 中的难点 。只有解决这一问题 ,建立复杂试验路面 才有可能 。
( 2) 如果 2个 I ( I = 1, 2)维单形 S1 、S2 ∈T (Ω, V ) ,那么 S1 ∩S2 要么是空集 , 要么是它们公共边或 顶点 ,并且是 T (Ω, V )中小于 I维的单形 ;
Adams组合路面的创建方法

Adams组合路面的创建方法Adams/Car提供了方便的2D路面创建工具Road Builder,用户可用该工具创建各类常用路面。
但在做汽车动力学分析时,用户往往需要用到复杂的路面模型,用单一的路面模型不能满足整车分析需要。
这就需要用户根据Adams/Car的路面生成工具进行相对应的路面特征增加,以此来实现多种特征路面的创建。
Adams/Car允许无数个特征的创建,主要应用根据用户需求而定。
1、2D路面创建在Adams/Car中,点击Simulate->Full-Vehicle Analysis->Road Builder,弹出下图所示的路面创建工具。
点击File->Open,在弹出的文件选择框左侧选择mdids://acar_shared/,在右侧文件夹选择项双击road.tbl,然后选择road_3d_plank_example.rdf。
其他参数不需要更改,主要修改路面的障碍特征即可。
点击Obstacle ,在Obstacle Type 选择pothole ,创建凹坑特征。
凹坑尺寸特征含义如右图所示。
修改Width (坑横向的跨度)为4,length 为0.4,Depth 为0.2,Start Location 改为-5,其他参数不更改。
设定好参数点击Save As ,把路面文件保存为pothole ,所创建路面特征如下图。
2、2D组合创建方法单一特征的路面模型对分析适用性较窄,因此需要创建多种特征组合的路面,来适应分析得需要。
在Adams/Car的Road Builder工具里,可在一个特征的基础上添加多种障碍特征。
保持pothole文件不退出,双击图标进入障碍设定添加项。
在Name空白处输入plank,点击Add,然后双击plank行,退回到特征参数的设定界面。
Obstacle Type改为plank,以下参数分别改为Width 4,Length 0.5,Friction 0.9,Start Location -7,Stop Location -10,Height 0.05,Bevel edge Length 0.002,Plank的参数意义如下图所示。
adams软件文档集合(一)

更新时间:2014-11-12
以下是小编整理的一些有关adams软件的系列文档(一)以及文档的简介, 其中包括了一些应用案例文档、教程和使用技巧。有关文档的下载,可以到研 发埠网站的版块,输入相应的文档名便可查找到。
1.Adams 仿真帮助好奇号探测车实现完美的火星着陆.pdf Adams 仿真帮助好奇号探测车实现完美的火星着陆
7.patran_nastran_adams(update)_solid实例.part2 有关patran_nastran_adams(update)_solid实例
8.ADAMS2012官方培训教程-测量,位移函数和CAD几何.pdf
有关ADAMS2012官方培训教程-测量,位移函数和CAD几何
5.Hypermesh_从nastran到adams的产生柔体几种方法.rar
有关Hypermesh_从nastran到adams的产生柔体几种方法
6.patran_nastran_adams(update)_solid实例.part4 有关patran_nastran_adams(update)_solid实例
、运动空间范围大特点,利用ADAMS规划设计了四足运动步态,并在ADAMS中进
行动力学仿真。仿真分析了对角步态下机器人质心位移、液压缸驱动力以及
与地面的接触力等参数,获得了液压缸工作流量、功率参数。仿真结果验证了
机器人结构设计、步态规划的可行性,为液压缸、发动机选型提供了参考依据
。
14.空气悬架的MATLAB和ADAMS的联合仿真研究
更多资料:/Home.html
19.MSCAdams在方案设计中的使用技巧 总结了在方案设计中使用MSC Adams 进行动力学仿真的一些技巧,可有效地 提高MSC Adams 软件的使用效率.
汽车平顺性仿真中路面文件生成方法.pdf
( 旅行客车除外) 、越野车及总质量大于 4 t 但小于 20 t 的货车 h= 80mm ; % 总质量大于 20 t 的货车 h= 120 m m。
宽度 B 按需要 而定, 但必 须大于轮宽, 长度 L 规定为 400 m m。
经分析可知, 在所生成的 A 级随机路面或水平 路面文件中更改部分节点添加一个三角形凸块或长 坡形凸块即可生成脉冲输入路面文件。图 4 是生成 的脉冲输入路面图, 中间部分为三角形凸块。
比较而言, 第二种方法不需要编程基础, 但不太 方便, 适合短期内完成 项目的人员; 第一种需要 编 程, 但快捷方便, 适合长期从事该行业的专业人员。
图 2、图 3 分别是车速为 60 km/ h 时 B 级路面 的路面不平度曲线图和仿真中的路面图。 2. 2 脉冲输入路面文件的生成
根据 GB4970 ∀ 85 中相关规定, 汽车平顺 性实 验中的脉冲输入采用 2 种形状的单凸块: 三角形和 长坡形。三角形凸块形状具体为: # 轿车、旅行客车 及总质量小于或等于 4 t 的货车 h= 60 m m; ∃ 客车
图 7 汽车以 60 km/ h 行驶于搓板路面时质 心垂直方向加速度及 FFT 变换曲线
4 结束语
本文讨论了仿真中常 用的几种路面 的生成方 法, 并生成了常用车速下的相应路面。建立整车模 型对所生成路面进行了仿真验证, 仿真结果说明了 生成方法的可行性的及路面的正确性, 对 ADAM S 用户有一定的参考价值。
u f2
.
2 路面的生成
由 A DA M S 中路面文件[ 1] 的特点可知, 路面的
& 108 &a路面进行分析, 将其分 解为一系列三角形并研究各元素间的组合方式, 然 后用一定的方法实现。 2. 1 随机输入路面文件的生成
adams路面文件
时域道路模型在MSC.ADAMS中道路时域道路模型是通过属性文件来表达的,而属性文件的创建是使用独立插件Road Builder来完成,通过Road Builder还可以创建IPG和ARM格式包括路肩的3D 道路。
它支持以下种类的路面几何轨迹✧常规仿真车道(开环或闭环)✧赛车道(Chicane)✧椭圆环车道(Oval)✧路标筒车道通过Road Builder可以生成下列种类的文件:✧.rdf✧.drd✧.dcd✧.shl✧.dig (仅用于IPG)✧.road (仅用于IPG)注:使用Road Builder需要单独的许可证文件(license file),但在ADAMS 2005R2版里已经作为标准插件。
在ADAMS里路面模型是通过后缀名为.rdf的路面文件引入到仿真环境中,路面文件的结构仍然是TeimOrbit格式的ASCII文本文件。
例如在操纵性仿真中常用的平整路面文件有:在路面文件中的标题数据块、单位数据块的定义方式与DCF、DCD文件一样,[MODEL]数据块定义路面的类型,[GRAPHICS]数据块定义路面几何图形,注意,在2D道路中只有平整路面Flat才有路面图形;其他类型的路面可以通过专用软件包FTire-tools提供的road visualization功能观察路面形状(另一种方法是用函数构造器下的create_shell_from_rdf函数将路面文件转化为shell文件,再将shell壳文件加入到模型中);[PARAMETERS]数据块定义路面的如摩擦系数、几何形态等参数。
道路类型:道路的类型在TeimOrbit格式的道路属性文件中通过[MODEL]数据块中的METHOD、ROAD_TYPE语句定义,[MODEL]数据块定义的常用道路类型如下:METHOD FUNCTION_NAME ROAD_TYPE‘2D’二维路面‘ARC901’DRUM 轮胎转鼓试验台FLAT 平整路面PLANK 矩形凸块路POLY_LINE 折线路面POT_HOLE 凹坑路面RAMP 斜坡路面ROOF 三角形凸块路面SINE 正弦波路面SINE_SWEEP 正弦变波纹路面STOCHASTIC_UNEVEN 随机不平路面‘3D’‘ARC904’ /none 3D等效容积道路‘3D_SPLINE’'ARC903'/none 3D样条路面'5.2.1' 'ARC913' FLAT或INPUT 521轮胎模型专用路面‘USER’‘ARC501’自定义[FUNCTION_NAME]函数名称变量指路面与轮胎接触函数ID号2D道路文件MTTHOD=2D时二维路面的参数[PARAMETERS]子数据块:参数子数据块[PARAMETERS]的结构根据路面类型的不同而不同,基本上可以划分为3隔部分:通用参数段、路型参数段和数据组,用符号$分开。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
时域道路模型
在MSC.ADAMS中道路时域道路模型是通过属性文件来表达的,而属性文件的创建是使用独立插件Road Builder来完成,通过Road Builder还可以创建IPG和ARM格式包括路肩的3D道路。
它支持以下种类的路面几何轨迹
✧常规仿真车道(开环或闭环)
✧赛车道(Chicane)
✧椭圆环车道(Oval)
✧路标筒车道
通过Road Builder可以生成下列种类的文件:
✧.rdf
✧.drd
✧.dcd
✧.shl
✧.dig (仅用于IPG)
✧.road (仅用于IPG)
注:使用Road Builder需要单独的许可证文件(license file),但在ADAMS 2005R2版里已经作为标准插件。
在ADAMS里路面模型是通过后缀名为.rdf的路面文件引入到仿真环境中,路面文件的结构仍然是TeimOrbit格式的ASCII文本文件。
例如在操纵性仿真中常用的平整路面文件有:在路面文件中的标题数据块、单位数据块的定义方式与DCF、DCD文件一样,[MODEL]
数据块定义路面的类型,[GRAPHICS]数据块定义路面几何图形,注意,在2D道路中只有平整路面Flat才有路面图形;其他类型的路面可以通过专用软件包FTire-tools提供的road visualization功能观察路面形状(另一种方法是用函数构造器下的create_shell_from_rdf函数将路面文件转化为shell文件,再将shell壳文件加入到模型中);[PARAMETERS]数据块定义
路面的如摩擦系数、几何形态等参数。
道路类型:
道路的类型在TeimOrbit格式的道路属性文件中通过[MODEL]数据块中的METHOD、ROAD_TYPE语句定义,[MODEL]数据块定义的常用道路类型如下:
METHOD FUNCTION_NAME ROAD_TYPE
‘2D’二维路面‘ARC901’DRUM 轮胎转鼓试验台
FLAT 平整路面
PLANK 矩形凸块路
POLY_LINE 折线路面
[FUNCTION_NAME]
函数名称变量指路面与轮胎接触函数ID号
2D道路文件
MTTHOD=2D时二维路面的参数[PARAMETERS]子数据块:
参数子数据块[PARAMETERS]的结构根据路面类型的不同而不同,基本上可以划分为3隔部分:通用参数段、路型参数段和数据组,用符号$分开。
路型参数段:
ROAD_TYPE =FLAT
——平整路面
ROAD_TYPE =DRUM
——转鼓试验台
参数子数据块
镶条参数示意图
参数说明
DIAMETER 转鼓直径,通常大于4m;当转鼓的直径为负数时,试验使用的
是转鼓外表面,为正数时使用转鼓的内表面。
与此对应,一个
正的转鼓速度在外表面时为逆时针,在内表面时为顺时针。
ROTATION_ANGLE_XY_PLANE 转鼓轴线与XY平面角度
V转鼓表面线速度,(应确认汽车本身的速度是为0的,并且转鼓
的中心与汽车的x=0共线)。
NUMBER_CLEATS镶条数目(镶条数目可以为0,即使用光滑表面的试验鼓)CLEAT_HEIGHT镶条高度
CLEAT_STARTING_ANGLE第一个镶条在鼓面上的角度位置
CLEAT_LENGTH镶条底边宽度
CLEAT_BEVEL_EDGE_LENGTH镶条45°倒角边长
ACCELERATION_TIME任选的仿真开始时刻,在这段时间内转鼓加速到额定速度(XZR_DATA)
共享数据库中mdi_2d_ramp.rdf不是TeimOrbit格式,不能用于A/Car模块的标准仿真。
它的功能可以用ROAD_TYPE=plank代替
ROAD_TYPE = plank
——凸块路面
参数子数据块
参数 说明
HEIGHT 凸块高度
START 汽车初始位置到凸块的距离 LENGTH
凸块沿X 轴方向长度
BEVEL_ENGE_LENGTH 凸块的倒角底边长度,倒角规定为45°;如果该长度值为负数,则表示该倒角为圆角,圆角的半径为该值的绝对值。
DIRECTION
凸块方向角(°),以与Y 轴的夹角表示;如果DIRECTION =0,表示横放在汽车的行进方向(设定汽车沿-X 轴方向前进)
ROAD_TYPE = poly_line —— 折线路面
参数子数据块
[PARAMETERS]必须有(XZ_DATA) 子段;在XZ 子段中的3列数据,其意义是:第一列为X 值(行程值);第二列和第三列分别是左右车轮轨迹处的Z 向高度。
(XZ_DATA ) 子段可以定义得很长(超过200行),且不需要任何注释行,注意折线路面同时定义了两侧的轮辙。
ROAD_TYPE = pot_hole —— 凹坑路面
参数子数据块
HEIGHT
LENGTH
START
Z
X
ROAD_TYPE = ramp ——斜角凸块路面
参数子数据块
ROAD_TYPE = roof ——三角形凸块路面
参数子数据块
ROAD_TYPE = sine ——正弦波路面
参数子数据块
ROAD_TYPE = sine_sweep ——正弦变波纹路面
参数子数据块
Height
Start
Height
Length
Start
Length
Depth
Start
α
Slope=tan(α)
Start Wave length
Amplitude
参数说明
START 波纹路开始时的车辆行程
END 波纹路结束时的车辆行程
AMPLITUDE_AT_START 开始时波幅
AMPLITUDE_AT_END 结束时波幅
WAVE_LENGTH_AT_START 开始时波长
WAVE_LENGTH_AT_END 结束时波长,必须≤开始时波长
SWEEP_TYPE sweep_type = 0:频率在全程波纹路段内线性递增
sweep_type= 1:频率在全程波纹路段按自然内对数递
增
ROAD_TYPE = stochastic_uneven
——随机不平路面
在ADAMS中的二维随机路面是根据路面文件按白噪声线性滤波法生成的左右两条轮辙纵
剖面曲线。
值得注意的是,在2003版(包括2003版)以前,MSC向用户提供的位于共享数据
库中的随机不平路面示例文件mdi_2d_uneven.rdf是随第一个F-Tire一起发布的,一直没有得
到更新,如果用户要使用该文件作为模板则应修改PATH_CONSTANT的值为1000m(原为20)。
参数子数据块
这个值相当于H级道路
参数说明
START 随机不平路开始时的车辆行程
INTENSITY 按道路级别从ISO 8608选择空间功率谱密度的平均值计算其平方根,即
MeanValue
INTENSITY 。
例如,我们选择的随机不平道路的级别是。