航空摄影测量立体测图基础
无人机航测技术与应用课件:航空摄影测量基础

航摄像片的特点
当像片倾斜、地面起伏时,地面点在航摄像片上构像相对于理想 情况下的构像所产生的位置差异称像点位移
航摄像片与地形图的区别 1)投影方式的不同:地形图为正射投影,航摄像片为中心投影
AC B
c ab
c ba S
B
A
C
2)航片存在两项误差:像片倾斜引起的像点位移,地形起
伏引起的像点位移
s
5.2双像解析摄影测量
5.2.1共线方程 4共线方程
X
Y
Z1
X A X s YA Ys Z A Zs
X
Y
Z
1
X A
YA ZA
Xs Ys Zs
X x a1 a2 a3 x
Y Z
R y f
bc11
b2 c2
b3 c3
y f
5.2双像解析摄影测量
y
RT
Y
a2
b2
c2
Y
f Z a3 b3 c3Z
其中R是一个正交矩阵,它由9个方向余弦构成
5.2双像解析摄影测量
5.2.1共线方程 3空间直角坐标系的旋转变换
a1 a2 a3 cos Xx cos Xy cos Xz
R b1
b2
b3
c
osYx
cosYy
0201-摄影测量基本知识

g i Pg
主垂线(SN)
k R K W
t
k
V N t
T
6、透视变换中的特别点、线、面 SO:主光轴 (Especial Points、Lines、Planes ) 特殊点(9): 像主点(o) 地主点(O) 像底点(n) 地底点(N)
主横线(hoho)
等比线(hchc)
g
主灭点(K) 主迹点(V) 主合点(i) 像等角点(c)
L
l
5像片旋角:一张像片上相邻主点连线
与同方向框标连线间的夹角。要求旋片 角不得大于60
a2 a1
像片旋角过大会减少立体像对的有效范围
6像对:航向相邻两张像片组成一个像对
理想像对:相邻两像片水平、摄影基线水平组成的像对 正直像对:相邻两像片水平、摄影基线不水平组成的像对 竖直像对:相邻两像片不严格水平、摄影基线不水平组成 的像对
地等角点(C)
k
S
hc R t K W k
G ho c o hc ho
i
Pg
n V N t
C
O
T
6、透视变换中的特别点、线、面 (Especial Points、Lines、Planes ) 底点特性
S
p
t
V
a0
a
A
α
n N
底点特性: 铅垂线在像平面上 的构像位于以像底 点n为辐射中心的相 应辐射线上.
a
o
Z
ZT
x
G
YT
X
A
G
O
OT
XT
Y
G
[三]常用的坐标系统 1、常用的坐标系统(Coordinate System)
• • • • • •
航空摄影测量

航空作业名称
01 基本原理
03 相关技术
目录
02 优点 04 测量方法
05 具体工作
07 未来发展
目录
06 我国发展情况
航空摄影测量(aerial photogrammetry)指的是在飞机上用航摄仪器对地面连续摄取像片,结合地面控制 点测量、调绘和立体测绘等步骤,绘制出地形图的作业。
测量方法
20世纪30年代以来,航空摄影测量的测图方法主要有3种,即综合法、全能法和分工法(或称微分法)。
航空摄影测量的综合法是摄影测量和平板仪测量相结合的测图方法。地形图上地物、地貌的平面位置由像片 纠正的方法得出像片图或线划图,地形点高程和等高线则用普通测量方法在野外测定。它适用于平坦地区的大比 例尺测图。
③综合法测图。主要是在单张像片或像片图上用平板仪测绘等高线。
航测内业工作包括:
①测图控制点的加密。以前对于平坦地区一般采用辐射三角测量法,对于丘陵地和山地则采用立体测图仪建 立单航线模拟的空中三角,进行控制点的加密工作。20世纪60年代以来,模拟法空中三角测量逐渐地被解析空中 三角测量代替(见空中三角测量)。
航空摄影测量的全能法是根据摄影过程的几何反转原理,置立体像对于立体测图仪内,建立起所摄地面缩小 的几何模型,借以测绘地形图的方法。在立体测图仪上安置像片时依据内方位元素,目的是使恢复后的投影光束 同摄影光束相似(也可在一定条件下变换投影光束)。由于像对的相对定向过程中并未加入控制点,只利用了像 对内在的几何特性,所以建立的几何模型的方位是任意的,模型的比例尺也是近似值,因此必须通过绝对定向才 能据以测图。
全能法测图的仪器是立体测图仪。
具体工作
航空摄影测量需要进行外业和内业两方面的工作。
航测基础知识讲课文档

第三十五页,共64页。
三数字正射影像图
数字正射影像图(Digital Orthophoto Map 简称 DOM)是利用数字高程模型对扫描处理的数字 化的航空相片/遥感相片(单片/彩色),经逐象
元进行纠正,再按影像镶嵌,根据图幅范围裁剪生 成的影像数据。一般带有公里格网、图廓内/外整 饰和注记的平面图。
旁向重叠:两相邻航带之间的重叠称为旁向重叠。
航测成图要求:航向重叠不小于60%,旁向重叠不 小于30%。
真正射的重叠度要求:相邻航片的重叠度不能小于85%。
第八页,共64页。
第九页,共64页。
第十页,共64页。
投影
用一组假想的直线将物体向几何面投射称为投 影,其投射线称为投影射线,投影的几何面通 常取平面称为投影平面,在投影平面上得到的 图形称为该物体在投影平面上的投影。
摄影比例尺与成图比例尺
航摄比例尺是指空中摄影计划设计时的像片比例尺。 其计算公式为:M=f/h(其中f为焦距、h为飞机到地面的 相对高度即相对航高。)
成图比例尺是指图上一个单位距离在实地的距离的 比例。如1:500表示图上1米代表的是实地上500米。
第五页,共64页。
国内常见摄影比例尺和成图比例尺的 关系
间坐标轴的两个角度和像片绕摄影方向旋转的一个角度。
Z
Y
φ 航向倾角
S
X
ω
y
ω 旁向倾角
Z
Zs φ
κ
Y
pox
κ 像片旋角
O
Ys
O´
Xs
X
D
第二十一页,共64页。
8 相机
在立体测图之前,选择正确的相机文件,至关重 要。定向之前一定要检查测区信息中相机文件的 指标是否正确。相机有多种,最常见的几种相机 如下:
航空摄影测量技术的基本原理及操作步骤
航空摄影测量技术的基本原理及操作步骤航空摄影测量技术是利用航空摄影测量设备,通过飞行器在空中进行航拍,结合摄影测量原理和相关测量手段,对地面物体进行测量、测图和分析的一种技术。
其基本原理和操作步骤是航空摄影测量工作者必须掌握的重要知识。
一、航空摄影测量的基本原理航空摄影测量的基本原理包括航空摄影原理、摄影测量原理和测图原理。
1.航空摄影原理:航空摄影原理是指在航空器上安装相机,通过摄影机进行航空摄影,获取地面物体的图像信息。
其中包括飞行高度、航向角、倾角、焦距等要素的测量和控制。
2.摄影测量原理:摄影测量原理是指通过对航空摄影图像的几何解析,获得地面物体的位置、形状和尺寸等相关信息。
其中包括像空间和物空间的几何关系、立体视觉原理、影像纠正等。
3.测图原理:测图原理是指通过对航空摄影图像的解译和分析,生成具有地理空间坐标的地图产品。
其中包括地物解译、地物提取、三维建模等。
二、航空摄影测量的操作步骤航空摄影测量包括任务规划、飞行前准备、航空摄影、航空制图等多个步骤。
1.任务规划:在进行航空摄影测量之前,需要进行任务规划,确定摄影区域、飞行高度、航线计划、地面控制点等。
这一步是整个航空摄影测量的基础。
2.飞行前准备:飞行前准备包括协调飞行任务、组织资源、准备测量设备和器材等。
确保航空摄影测量工作的顺利进行。
3.航空摄影:在航空器上安装好相机后,根据任务规划进行航飞。
在飞行过程中,航空摄影仪器会自动拍摄照片,记录地面物体的图像。
4.航空制图:航空制图是利用航空摄影图像进行解译和分析,生成地图产品的过程。
该步骤包括密集块的测绘、地物特征的解译、地物提取、地理信息系统构建等。
三、航空摄影测量的应用领域航空摄影测量技术在各个领域有广泛的应用,如城市规划、土地调查、资源调查、环境监测、灾害评估等。
1.城市规划:航空摄影测量可以为城市规划提供大规模的高分辨率影像资料,用于调查测量、地形分析、地物分类等。
可以帮助规划师更好地进行城市规划设计。
无人机航空摄影测量:立体像对解析基础

互补色法:一般采用红、 绿两种颜色。如果我们将 左影像表示为红颜色,右 影像表示为绿色,并将其 叠合在一起,如右图。当 人们带上一个由红、绿颜 色组成的眼睛时,就可以 看出立体。这是由于红色 影像(左影像)只能通过 红色滤光片到达左眼,绿 色影像(右影像)只能通 过绿色滤色片到达左眼, 从而达到“分像”进行立 体观察的目的
双像解析摄影测量的方法:
➢ 单张像片的空间后方交会与立体像对的前方交 会方式求地面点的三维坐标
➢ 用解析相对定向和绝对定向方法求解地面点的三 维坐标
➢ 光束法求解地面点的三维坐标
立体像对中的点、线、面
同名光线(AS1,AS2) 同名像点(a1,a2) 摄影基线(S1S2)
P1
ao1 1 n1
o2 n2 a2
w2
v2 u2
A(U,V,W)
模型点坐标:
U A N1u1 bu N2u2 VA N1v1 bv N2v2 WA N1w1 bw N2w2
u1 x1
v1
R1
y1
,
w1 f
u2 x2
v2
R2
y2
w2 f
N1
bu w2 u1w2
bwu2 u2w1
W1
V2
V1
U2
s1
w1 v1 u1
U1
其中常数项为:
F0 w1u2 u1w2
N1v1 N2v2
Bv
Q
N1v1
N2v2
常数项的几何意义:
第3章摄影测量基础知识

三、摄影测量生产对摄影资料的基本要求
1、影像的色调 影像清晰、色调一致、反差适中,无防碍测图 的阴影。 2、像片倾角 像片倾斜角的要求,一般为2-3度之间。
像片倾斜角:航空摄影时,航空 摄影机主光轴与铅垂线的夹角, α= 0 时为最理想的情形。
3、像片重叠 ❖航向重叠度与旁向重叠度
航向重叠:同一航线内相邻像 片应有一定的影像重叠。 旁向重叠:相邻航线也 应有一定的重叠。
地面摄影测量坐 标系
摄影测量坐标系
像平面坐标系
1.框标坐标系
框标坐标系是依像片上相应框标连线作为基准建立直角坐 标。
对于框标设在像幅四边中央的像片,通常依航线方向两边 对应框标连线作为x轴,以飞行方向为正方向;旁向两边 对应框标连线作为y轴,方向以右手系确定;两连线的交 点P作为坐标原点.如图所示。
2、航摄机在摄影曝光的瞬间物镜主光轴保持垂直地 面。
3、要确定地面点,用单张像片是不能确定位置的, 只能确定方向,所以要采用从不同摄站对同一区 域进行立体摄影,所以要求两相邻的照片要有重 叠,重叠的范围称为航向重叠度(60%-65%,最 小不得小于53%)。同理旁向重叠(30%-40%, 最小不得小于15%)
4、航线弯曲
❖ 航线弯曲:把一条航线内的像片根据地物的影像叠拼 起来,各张像片的像主点连线不在一条直线上,而呈 现为弯弯曲曲的折线
❖ 航线弯曲度:一条航线内各张像片主点至首尾两张像
主点连线的最大偏离度⊿L
⊿L
≤ 3%
L
⊿L L
我国航空摄影规范 中明确规定:航线 弯曲度一般不得超 过3%
5、对像片旋角的要求
2、重要点、线满足的数学关系:
on ftg
oc ftg 2
oi fctg
摄影测量基础知识

摄影测量基础知识一、航空摄影测量1.航空摄影:a.航空摄影机Leica:RC10,RC30Zeiss:RMK,LMKb.航摄仪焦距:窄角:300mm,常角:210mm,宽角:153mm,特宽角:70—100mm:c.像幅Format 180mm*180mm,230mm*230mm:d.像片倾斜角,航向和旁向倾角:=60%,旁向:>=30%:f.摄影比例尺,M图:M像=5倍左右2.外业控制测量与调绘a.控制点布设:平面控制点一般布设在所测区域的四角及周边,高程控制点则根据精度要求按基线数敷设高程导线.b.地面标志布设:对于高精度的测绘项目,在航空摄影前应在计划的平面控制点位置布设特定形状的标志.c.控制点联测:一般应先与高等级的国家三角点联测,控制点实测可用全站仪,激光测距仪,GPS全球定位系统等仪器进行.d.野外调绘:外业调绘系指利用航摄像片,放大像片或地形原图,实地辨认并绘注植被边界,电力线,通讯线,以及道路,居民地,水系的名称等.二、解析空中三角测量a.刺点:在涤纶像片上利用精密刺点仪,将选定的内业加密点刺出并编号标注.b.立体观测:在精密立体坐标量测仪或解析测图仪上,立体量测加密点及框标在左右像片上的坐标.当作业人员通过观测系统使左右眼分别观察左片和右片,则可看到重建的立体光学模型。
其他建立立体视觉的方法,包括:互补色法;偏振光立体眼镜法;液晶立体眼镜法等。
c.内定向:内定向是指根据量测的像片四角框标坐标和相应的摄影机检定植,恢复像片与摄影机的相关位置,即确定像点在像框标坐标系中的坐标.d.相对定向:相对定向的含义是,恢复摄影瞬间立体像对内左右像片之间的相对空间方位.确定两个像片的相对空间方位需要5个参数.相对定向的数学关系通常用同名光线共面条件表示,即左右摄影中心至地面点的两条光线共面.相对定向一般假定左像片保持水平不变,右片相对左片的五个参数通常以基线分量Bx,By 和右片的旋转角Ф,W,K表示.相对定向方程式为非线性函数,需要将其线性化.相对定向至少需量测6个定向点,利用最小二乘法平差解算.e.绝对定向:绝对定向也称大地定向,是指确定立体模型或由多个立体模型构成的区域的绝对方位,也就是确定立体模型或区域相对地面的关系.绝对定向参数为7个.f.区域平差:区域平差也称区域空中三角测量,俗称电算加密,是对整个区域网进行绝对定向和误差配赋.区域平差目前一般采用独立模型法或光线束法.独立模型法是以单个立体模型为单元;而光线束法则以单张像片为单元。
1:5000、1:10000地形图航空摄影测量内业规范
1:5000、1:10000 地形图航空拍照丈量内业规范1.地形图的规格投影、坐标系统和高程基准1:5000、1:10000 地形图采纳高斯——克吕格投影,按 3°分带。
平面坐标系统采纳 1980 西安坐标系;高程采纳 1985 国家高程基准。
地形图的分幅和编号地形图的分幅和编号按GB/T13989 履行。
在特别状况下,如周边国境线或广阔水域地区,图幅内只有少部分陆地,并入邻幅作破图廓办理。
破图幅的图幅编号写在主图幅编号以后,中间用逗号分开。
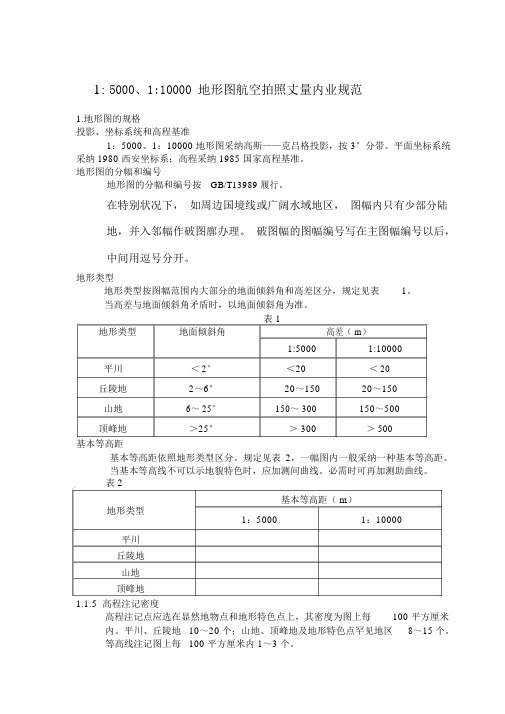
地形类型地形类型按图幅范围内大部分的地面倾斜角和高差区分,规定见表1。
当高差与地面倾斜角矛盾时,以地面倾斜角为准。
表 1地形类型地面倾斜角高差( m)1:50001:10000平川< 2°<20< 20丘陵地2~6°20~15020~150山地6~ 25°150~ 300150~500顶峰地>25°> 300> 500基本等高距基本等高距依照地形类型区分。
规定见表2,一幅图内一般采纳一种基本等高距。
当基本等高线不可以示地貌特色时,应加测间曲线。
必需时可再加测助曲线。
表 2地形类型基本等高距( m)1:50001:10000平川丘陵地山地顶峰地1.1.5 高程注记密度高程注记点应选在显然地物点和地形特色点上,其密度为图上每100 平方厘米内。
平川、丘陵地10~20 个;山地、顶峰地及地形特色点罕见地区8~15 个。
等高线注记图上每100 平方厘米内 1~3 个。
2.1 地形图的精度表 3地形类别平川、丘陵地( mm)山地、顶峰地( mm)中偏差项目加密点地物点表 4成图比率尺1:5000 ( m)1:10000 (m)地形类型平川丘陵山地顶峰平川丘陵山地顶峰地地地地内业加密————高点程高程注记中点误差等高线地形变地形变地形变地形变换点换点换点换点2.2 立体测图一般要求本条只规定各种测图仪在测图作业中共同恪守的一般要求。
航空摄影测量 第一章

⑷对像片重叠度的要求
同一航线相邻像片之间的重叠称为航向重叠,应达到60%~65%,最小 56%,最大75%
相邻两条航线之间像片的重叠称为旁向重叠,应达到30%~35%,个别最 小不应小于13%
六度重叠区 三度重叠区 四度重叠区
航向重叠度≥60℅ 航向重叠 旁向重叠 旁向重叠到的航摄底片
数码航摄仪
影 像 分 辨 率
胶片影像分辨率:用“线对/mm”表示。反映了线条及
其背景间的特定反差比
数字影像分辨率:用“地面采样间隔GSD (Ground Sample Distance)”表示。
四 航摄成图对航摄资料及大地测量的要求
• 1、对摄影质量的技术要求
⑴航空摄影后所获得的航摄像片,首先目视检查应满足影像清晰、色 调一致、层次丰富、反差适中、灰雾度小的要求。 ⑵航摄像片上不应有云影、阴影、雪影。 ⑶航摄像片上不应有斑点、擦痕、折伤及其他情况的药膜损伤。 ⑷航摄像片上所有摄影标志(如圆水准器、时钟、框标、像片号等) 应齐全且清晰可辨。 ⑸航摄像片应具有一定的现势性。
航空摄影测量的作业过程
航空摄影 航测外业
航空摄影
像控测量获取 GCPs
内业加密
解算像片外方位元素
Xs, Ys, Zs, , ,
测绘产品
前方交会解算地面点坐标
摄影比例尺的确定 航摄分区的划分
航摄准备
摄区基本情况分析 确定航摄设计用图
航 空 摄 影 的 流 程
基准面高度的确定
航线的敷设 航摄基本参数的计算 航摄季节和时间的选择 航摄仪的选择与检定 航摄胶片的选择与测定 配置冲洗药液 胶片冲洗 像片印制
6、摄影测量的产品——4D产品 DRG(Digital Raster Graphic) 数字栅格图 DLG (Digital Line Graphic) 数字线划图 DOM(Digital Orthophoto Map) 数字正射影像图 DEM(Digital Elevation Model) DSM (Digital Surface Model) 数字高程模型、数字表面模型
2.0基础版第7章(航空摄影测量)
7.2 航摄仪
1、胶片航摄仪: (1)概述:单镜头分幅摄影机是目前应用较多的航空摄影机,又称为框幅式摄影机,装有 低畸变透镜。胶片幅面的大小通常是 18*18cm、23*23cm、30*30cm,主要由镜筒、机身和 暗盒组成,大多设有两种类型的框标:位于承片框每边中央的机械框标和位于承片框四角的光 学框标。 (2)像场角和主距的选择:
中国测绘师论坛 | 斑点牛
编者按:此版本为 2.0 基础版,主要是把综合和案例辅导教材内容加以融合和归纳,力求不
遗漏知识点,并加以适当拓展和解析,使入门者容易看懂,并节省时间。本版笔记基本可以
替代官方教材使用,但读者最好还是把它作为官方教材的辅助资料。
后续加强的版本将以此为蓝本,标注重点,加以颜色注记,内容极大扩展,力求成为注册测
成图比例尺
设计用图比例尺
≥1:1000
1:1 万
≥1:1 万
1:2.5 万-5 万
≥1:10 万
(2)摄影比例尺选择: 成图比例尺 1:500 1:1000
航摄比例尺 1:2000-3500 3500-7000
1:10 万-25 万
比例尺分母关系 4-7 3.5-7
5
中国测绘师论坛 | 斑点牛
7.3 航摄基本要求:
1、像片倾角:摄影物镜的主光轴偏离铅垂线的夹角,小于 2-3°的称为竖直航空摄影,一
般不大于 2°,个别最大不大于 4°。通过陀螺稳定平台和调整座架来调整。
航测摄影测量的基本原理与操作方法

航测摄影测量的基本原理与操作方法引言:航测摄影测量是一种通过航空器上搭载的相机进行摄影测量的技术,它利用航空摄影测量的原理和方法,对地面目标进行大范围的获取、测绘和分析。
本文将介绍航测摄影测量的基本原理和操作方法。
一、航测摄影测量的基本原理航测摄影测量的基本原理主要包括空间立体视觉原理和射线投影、相对定向和绝对定向原理。
(1)空间立体视觉原理空间立体视觉原理是航测摄影测量的基础。
航测摄影测量相机通过分别向左右两侧拍摄,获取同一地物在不同角度下的影像,从而形成立体视觉。
利用立体视觉,可以测量地面点与相机在空间中的相对位置。
(2)射线投影原理射线投影原理是航测摄影测量中的基本原理之一。
相机成像原理是将实际世界中的立体景物通过镜头成像到胶片或传感器上,成像过程是实际世界中光线的投影过程。
(3)相对定向原理相对定向是指通过观测物点在不同摄影机像片上的连线,确定物点在空间中的位置和方位关系。
通过测量像点的图像坐标和像片外方位元素,可以得到物点的空间坐标。
(4)绝对定向原理绝对定向是指通过已知控制点的空间坐标和相机空间定位元素来确定相机的空间位置和姿态。
通过合理选择控制点,并通过测量和计算,可以将相机坐标系与地面坐标系进行转换,从而实现对地物的定位。
二、航测摄影测量的操作方法航测摄影测量的操作方法主要包括航迹规划、航空器摄影、航摄图像处理和制图。
(1)航迹规划航迹规划是航测摄影测量的第一步。
通过对测区进行分析和预估,确定航线布设,规划航摄的航迹以及飞行高度。
航迹规划需要综合考虑测区的地形、航摄需求以及飞行器的性能等因素。
(2)航空器摄影航空器摄影是航测摄影测量的核心环节。
在摄影之前,需要对航摄设备进行检查和校准,确保器材和系统的正常工作。
在飞行过程中,需要控制航速、航向和姿态等参数,保证摄影点的重叠度和图像的质量。
(3)航摄图像处理航摄图像处理是航测摄影测量的重要一步。
首先需要对航摄获取的图像进行质量检查和选择,剔除不合格的图像。
摄影测量基础与航空摄影试卷(第二阶段) (1)

试卷使用说明:(1)本次试卷打破教材体系,补充了一些摄影测量学基础知识,以便对摄影测量有一个概略的认识,并且分解后续《摄影测量与遥感》的难度。
到那时,我们将更多关注摄影测量与遥感作业流程,全面攻克关键内容,从而突破案例分析。
(2)本章最重要的内容包括:①设计用图比例尺选择②摄影比例尺确定③航摄仪选择与检定④摄影季节与航摄时间确定⑥航摄分区划分⑦航线敷设⑧计算航摄参数⑨航空摄影新技术⑩成果检查验收(3)本章案例主要是解决航摄参数计算问题。
(4)航空摄影流程图《摄影测量基础与航空摄影》试卷(第二阶段)一:单项选择题(每小题仅有一个选项最符合题意)1.航测法成图作业中,立体测图是基于()的原理。
A.空间前方交会B.空间后方交会C.空间侧方交会D.空间距离交会★摄影测量基础2.要获取单张像片的外方位元素,可利用一定数量的地面控制点,采用()方法进行。
A.空间前方交会B.空间后方交会C.相对定向-绝对定向D.空中三角测量★摄影测量基础3.基于胶片的航测内业数字化生产过程中,内定向的主要目的是()A.恢复像片内方位元素B.恢复像片外方位元素C.恢复像片像点坐标D.恢复扫描图像坐标★摄影测量基础4.立体像对相对定向所确定的立体模型属于()★摄影测量基础A.地面测量坐标系B.像空间辅助坐标系C.像空间坐标系D.地面摄影测量坐标系5.立体像对绝对定向的目的是()★摄影测量基础A.恢复立体像对左右像片相对位置关系B.把相对定向立体模型纳入地面测量坐标系C.恢复像点像平面坐标D.精确求定像片外方位元素6.以下不属于共线方程应用的是()★摄影测量基础A.数字微分纠正制作DOMB.单像空间后方交会和多像空间前方交会C.解析空中三角测量光束法平差D.立体像对绝对定向7.空三加密方法中,能最方便地顾及影像系统误差影响的方法是()A.航带法B.独立模型法★摄影测量基础C.光束法D.相对定向-绝对定向方法8.数字影像地面分辨率GSD表示的是()★摄影测量基础A.影像上一个像元的大小B.影像上一个像元所代表地面的大小C.影像上能识别的地面物体的最小尺寸D.扫描像素在原始胶片上的实际尺寸9.下列航摄仪中,()是基于三线阵CCD的推扫式测量型数字航摄仪。
无人机技术智能测绘课件:摄影测量技术基础知识

摄影测量的分类
摄影测量简介
摄影测量的分类:
➢ (2)按用途分类
➢ 地形摄影测量:主要任务是测绘国家基本比例尺的
地形图和各专题图,建立地形数据库,为地理信息系 统提供三维基础数据。无人机摄影测量通常应用于地 形摄影测量。
➢ 非地形摄影测量:将摄影测量方法应用于资源 调查、变形观测、环境监测、军事侦察等领域, 主要通过从二维影像重建三维模型,提取各种 信息。
2 人机交互矢量化成图
3 在数字正射影像图上,人工跟踪框架要素数字化。
4 数字摄影测量,三维跟踪测量。
DLG示意图
习题与思考题
1. 传统与现代的摄影测量有什么本质区别? 2. 摄影测量经历了几个发展阶段?每个阶段特点是什么? 3. 摄影测量的数字化产品包括哪些?
DOM示意图
摄影测量产品
DOM(数字正射影像图):
➢ (2)制作方法:
1 全数字摄影测量方法
全数字摄影测量采用数字影像进行内、相对、绝对定向,生成 DEM,进行数字微分纠正,最终生成裁切的数字正射影像图,包括 地名注记和图廓整饰。
2 单片数字微分纠正
单片数字微分纠正通过使用现有 DEM 数据和像片控制成果, 直接进行数字内定向和微分纠正,生成数字正射影像。
无人机地形摄影测量
摄影测量简介
摄影测量的任务:
摄影测量的主要任务是对地观测,据此测绘各种比例尺的地形图和专题图,如图所示,建立地 形图数据库,并贮备地理信息系统的建立与更新时需要的各种基础数据。
摄影测量的任务
摄影测量简介
摄影测量的优势
1 影像记录的物体目标客观、信息丰富、图像清晰 2 摄影测量不需要接触被测目标实物,因此测量
• 传感器搭载在航空飞机或航空器上,摄影距 离在 1~10km, 是当前摄影测量生产各种中 小比例尺地形图的主要方法。
摄影测量基础知识 ppt课件
2、平行投影与中心投影 [Central Projection & Parallel Projection ]
投射线互相平行的
正射投影(垂直投影)
投影,叫做平行投影。
§3-2中心投影的基本知识
2、平行投影与中心投影
地形图是地面的什么投影?
AB
D C
地形图
a0
b0 c0
d0
地形图在局部范围内是地面的正射投影! 航摄像片??
夹角。要求像片旋角<6
片
旋
角
o2
o1
像片旋角过大会减少立体像对的有效范围
§3-2中心投影的基本知识
一 中心投影的基本知识
1、投影[Projection]
一个空间点按一定方式在一个平面上的构像,叫做该 空间点的投影。
物点、像点、投射线、像面(投影平面)
物点
像面
投影射线 像点
§3-2中心投影的基本知识
数学工具:微 分
dc
f
ab
P0 P
S
H
AB
CD
§3-1 航空摄影
1、像点比例尺的概念和一般公式
?
• 像点比例尺的概念
1lims ds m s0S dS
点比例尺定义:为像片上 某点在某一方向上的无穷 小线段与地面上相应线段 长度比的极限。
§3-1 航空摄影
摄影比例尺与成图比例尺的关系
§3-1 航空摄影
绝对航高:航摄仪物镜 中心S在摄影瞬间相对于 大地水准面的高度。
H0hHT
§3-1 航空摄影
航高差
同一航线上相邻像片的航高差不得大于30m,最大航高与 最小航高之差不得大于50m;
摄影分区内实际航高与设计航高之差不得大于设计航高的 5%。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Y手轮
上下视差环
测绘与城市空间信息系 Steko 1818 型立体坐标量测仪
立体坐标量测步骤
仪器归零:各个手轮应放在零读数(x0,y0,p0,q0)位置上,
左、右测标分别对准左、右像片盘的中心即仪器坐标系与像片 坐标系重合 上的x轴向运动,若测标不在x轴向上,则需要用k螺旋旋转像 片,使测标保持在x轴上移动
测绘与城市空间信息系
立体效应
正立体
S1
b1 a1 b2
反立体
S1
P2
反立体
S2
S1
a1 P1 b1 a2
S2
S2
a2 P2
b2
a2
b1
a1
P1
P1
b2 P2
B A
A B
A B
立体模型与实物相反
(正立体效应基础上左右像片旋转180°)
立体模型与实物相似
零立体:起伏的视模型变平(正立体效应基础上左右像片旋转90°) 测绘与城市空间信息系
Ztp Z0 Ytp X0 Y0
Mห้องสมุดไป่ตู้
Xtp
绝对定向元素: ,X0 , Y0 , Z0 ,, , 测绘与城市空间信息系
四、像点坐标的获取
S1 S2
立 体 量 测 原 理
a
a’
A’ A A” 测绘与城市空间信息系
四、像点坐标的获取
双像立体测图:利用一个立体像对重建立体几何模型,量 测该几何模型,绘制地形图。
Lx,Ly为框标距的理论值 lx,ly为框标距的量测值 x’,y’为像点坐标的量测值 x,y 为像点坐标的改正值 测绘与城市空间信息系
像片系统误差预改正(摄影机物镜畸变差)
• 摄影机鉴定时提供物镜畸变差参数
x x( k0 k1r 2 k 2 r 4 ) y y ( k0 k1r 2 k 2 r 4 )
三、模型的绝对定向
描述立体像对在摄影瞬间的绝对位置和姿 态的参数 通过将相对定向模型进行缩放、平移和旋 转,使其达到绝对位置
测绘与城市空间信息系
绝对定向公式
X tp X p X0 Y R Y Y tp p 0 Z tp Z p Z0
y’ x’
仿射变换
x a0 a1x a2 y y b0 b1x b2 y
x
双线性变换
x a0 a1 x a2 y a3 xy y b0 b1 x b2 y b3 xy
测绘与城市空间信息系
像片误差源
摄影机的系统误差 底片变形 航摄飞机带来的系统误差 大气折光误差 地球曲率的影响 摄影处理与底片复制中的系统误差 观测系统误差
测绘与城市空间信息系 描述立体像对中两张像片相对位置和姿态关系的参数
连续法相对定向元素
Z2 Y2 Z1 Y1 B X1 Bx S2 X2 y2
Bz
By
以左像空间 坐标系为基 础,右像片 相对于左像 片的相对方 位元素
x2
S1 y1
x1
k w
连续法相对定向元素: By , Bz ,,w,k
测绘与城市空间信息系
像点量测:移动X,Y,p,q手轮,使测标立体切准量测像
像片定向:移动X手轮,单眼观察测标的移动看是否沿像片
点,并记下相应读数鼓上的读数 x,y,p,q
坐标计算: xa=x-x0, ya=y-y0;
xa’=xa-(p-p0), ya’=ya-(q-q0 )
测绘与城市空间信息系
测绘与城市空间信息系
四、像点坐标的获取
PSK-2精密立体坐标量测仪
测绘与城市空间信息系
四、像点坐标的获取
BC2解析测图仪
测绘与城市空间信息系
四、像点坐标的获取
数字摄影测量工作站
测绘与城市空间信息系
四、像点坐标的获取
光学框标
机械框标
测绘与城市空间信息系
解析内定向
• 利用平 面相似 变换, 将像片 架坐标 变换为 以像主 点为原 点的像 平面坐 标
单独法相对定向元素
Z1 Y1 S1 X1 y1 B S2 Z2 Y2 X2 y2
在以左摄影中心 为原点、左主核 面为 XZ 平面、 摄影基线为 X 轴的右手空间直 角坐标系中,左 右像片的相对方 位元素
x2
k2
k1
1 2
w2
单独法相对定向元素: 1 , k1 ,2,w2,k2
测绘与城市空间信息系
测绘与城市空间信息系
像 片 系 统 误 差 源
像片系统误差预改正(摄影材料变形)
• 四个框标位于像片的四个角隅时 可用仿射变换
x a0 a1x a2 y y b0 b1x b2 y
•
四个框标位于像片的中央时可用 比例缩放
x x y x Lx lx Ly ly
测绘与城市空间信息系
一、立体视觉原理
人 眼 基 本 构 造
视网膜上大约有108个杆状细胞,直径2mm;
6.5×106个锥状细胞,直径2~8mm
测绘与城市空间信息系
一、立体视觉原理
人 眼 感 知 过 程
来自物体的光刺激视网膜的杆状和锥状细胞(物
理过程)使其感光(生理过程),通过视神经纤
维传至后大脑视觉中心,经记忆加入已有的概念 与经验(心理过程),从而形成感知
测绘与城市空间信息系
四、像点坐标的获取
立 体 量 测 原 理
左右像片同名像点的坐标量测值为(xa,ya),( xa’,ya’ ) 左右视差 p= 测绘与城市空间信息系 q= ya – ya’ xa – xa’ 上下视差
四、像点坐标的获取
左右视差(p)读数鼓 上下视差(q)读数鼓
x读数鼓 X手轮
左右视差手轮
2倍
测绘与城市空间信息系
一、立体视觉原理
人用双眼观察景物可判断其远近,得到景物的立体效应, 这种现象称为人眼的立体视觉
人 眼 立 体 视 觉
生理视差=ab ab
测绘与城市空间信息系
一、立体视觉原理
人 眼 的 观 察 能 力
交会角 眼基线 视 距 生理视差 眼主距 r br L σ fr
正形变换
x a0 a1x a2 y y b0 a2 x a1 y
y
y’ x’
仿射变换
x a0 a1x a2 y y b0 b1x b2 y
x
双线性变换
x a0 a1 x a2 y a3 xy y b0 b1 x b2 y b3 xy
测绘与城市空间信息系
测绘与城市空间信息系
二、像对的立体观察
像 对 的 立 体 观 察 方 法
叠映影像立体观察
光闸法
在两投影光路中各安装一光闸 (一个打开、一个关闭) 观测者双眼分别带上与投影器 光闸同步的光闸眼镜 光闸起闭频率>10Hz
测绘与城市空间信息系
二、像对的立体观察
像 对 的 立 体 观 察 方 法
• 地球曲率引起像点在径向的变形
H 2 Rf 2
r 为像点误差改正数
r3
r 为向径 R 为地球曲率半径
•
地球曲率引起像点在坐标向的变形
x r y y r
x
测绘与城市空间信息系
像片系统误差预改正
• 内定向并经系统误差预改正后的像点坐标
x x x dx x y y y dy y
叠映影像立体观察
偏振光法
在两投影光路中安装两块偏振 平面互成90°的起偏镜 观测者带上一副检偏镜 镜片与起偏镜相同 左右偏振平面相互垂直
测绘与城市空间信息系
二、像对的立体观察
双目镜观测光路的立体观察
像 对 的 立 体 观 察 方 法
通过双筒望远镜观察
每个望远镜像面有一固定的测标
像片可在两个相互垂直方向共同移动,也可一张像片相对于另一张 像片移动 可以分别对左右像片进行调焦、亮度调节及必要旋转,观测系统放 测绘与城市空间信息系 大倍率可调节
Lmax=
min
br
65 207692 450m 30
测绘与城市空间信息系
一、立体视觉原理
A
人 造 立 体 视 觉 的 产 生
B
P a
b
a’ b’
P’
左眼
右眼
测绘与城市空间信息系
一、立体视觉原理
人 造 立 体 观 察 的 条 件
立体像对
分像条件 两像片上相同景物(同名像点)的连线 与眼基线应大致平行 两像片的比例尺应相近(差别<15%)
b tan( ) r 2 2L b r L b d r2 dL L br dr L2 σ dL 2 br f r
当人眼观察50m处景物时,设双眼观察的
分辨力为30〞,人眼基线长65mm,人眼
主距17mm,则dL=5.6m 人眼分辨远近物点的极限距离
测绘与城市空间信息系
一、立体视觉原理
单眼能够判别最小物体的能力称单眼分辨力
人 眼 分 辨 力
用单眼所能观察出两点间的最小距离称第一分辨力
用单眼所能观察出两平行线间的最小距离称第二分辨力
0.0035 第一分辨力 = 45 17 第二分辨力 20
双眼观察精度比单眼提高
内定向
镜头畸变
大气折光
地球曲率
测绘与城市空间信息系
实验与讨论
1 像对立体观察产生立体感觉的原因是什么?
2 看一张航空像片能否看出立体? 3 像对立体观察的条件是什么? 4 如何实现正立体—>反立体,正立体—>零立 体,其原因是什么?