列车自动驾驶系统 2分解
列控系统的系统构成与分级

闭塞与列控概论傅世善第三讲列控系统的系统构成与分级3.列控系统的系统构成我国正在编制中国列车运行控制系统(简称CTCS)的技术规范,着手全力发展和装备列车运行控制系统。
CTCS技术规范是参照欧洲列车运行控制系统(简称ETCS)编制的。
以下的介绍将以CTCS为主。
CTCS系统两个子系统,即车载子系统和地面子系统。
地面子系统可由以下部分组成:应答器、轨道电路、无线通信网络(GSM-R)、列车控制中心(TCT)/无线闭塞中心(RBC)。
其中GSM-R不属于CTCS设备,但是重要组成部分。
应答器是一种能向车载子系统发送报文信息的传输设备,既可以传送固定信息,也可连接轨旁单元传送可变信息。
轨道电路具有轨道占用检查、沿轨道连续传送地车信息功能,应采用UM系列轨道电路或数字轨道电路。
无线通信网络(GSM-R)是用于车载子系统和列车控制中心进行双向信息传输的车地通信系统。
列车控制中心是基于安全计算机的控制系统,它根据地面子系统或来自外部地面系统的信息,如轨道占用信息、联锁状态等产生列车行车许可命令,并通过车地信息传输系统传输给车载子系统,保证列车控制中心管辖内列车的运行安全。
车载子系统可由以下部分组成:CTCS车载设备、无线系统车载模块。
CTCS车载设备是基于安全计算机的控制系统,通过与地面子系统交换信息来控制列车运行。
无线系统车载模块用于车载子系统和列车控制中心进行双向信息交换。
见图3.1 CTCS系统结构示意图。
图3.1 CTCS系统结构示意图4. CTCS应用等级CTCS根据功能要求和设备配置划分应用等级分,分为0~4级。
CTCS应用等级0(以下简称L0):由通用机车信号+列车运行监控装置组成,为既有系统。
CTCS应用等级1(以下简称L1):由主体机车信号+安全型运行监控记录装置组成,点式信息作为连续信息的补充,可实现点连式超速防护功能。
CTCS应用等级2(以下简称L2):是基于轨道传输信息并采用车-地一体化系统设计的列车运行控制系统。
11-CTCS-2级列控系统结构
第11讲 CTCS-2级列控系统结构
一、概述
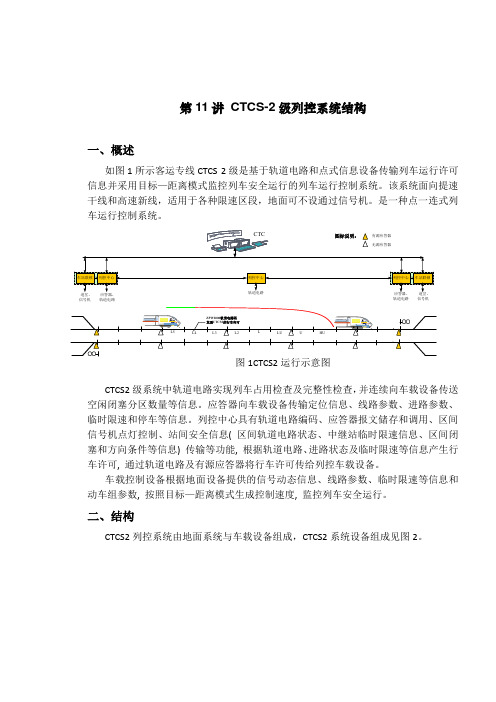
如图1所示客运专线CTCS 2级是基于轨道电路和点式信息设备传输列车运行许可信息并采用目标—距离模式监控列车安全运行的列车运行控制系统。
该系统面向提速干线和高速新线,适用于各种限速区段,地面可不设通过信号机。
是一种点一连式列车运行控制系统。
CTCS2级系统中轨道电路实现列车占用检查及完整性检查,并连续向车载设备传送空闲闭塞分区数量等信息。
应答器向车载设备传输定位信息、线路参数、进路参数、临时限速和停车等信息。
列控中心具有轨道电路编码、应答器报文储存和调用、区间信号机点灯控制、站间安全信息( 区间轨道电路状态、中继站临时限速信息、区间闭塞和方向条件等信息) 传输等功能, 根据轨道电路、进路状态及临时限速等信息产生行车许可, 通过轨道电路及有源应答器将行车许可传给列控车载设备。
车载控制设备根据地面设备提供的信号动态信息、线路参数、临时限速等信息和动车组参数, 按照目标—距离模式生成控制速度, 监控列车安全运行。
二、结构
CTCS2列控系统由地面系统与车载设备组成,CTCS2系统设备组成见图2。
信号机
轨道电路
信号机
轨道电路
图2 CTCS2级列控系统结构图。
CTCS-2级列控系统操作

■目标距离控制模式根据目标距离、目标速度及列车本身的性能确定列车 制动曲线,不设定每个闭塞分区速度等级,采用一次制动方式。目标距离 控制模式追踪目标点是前行列车所占用闭塞分区的始端,而后行列车从最 高速开始制动的计算点是根据目标距离、目标速度及列车本身的性能计算 决定的。目标点相对固定,在同一闭塞分区内不依前行列车的走行而变化, 而制动的起始点是随线路参数和列车本身性能不同而变化的。两列车空间 间隔的长度是不固定的,所以称为准移动闭塞。
CTCS-2列控系统速度防护模式
• 目标距离速度控制线,从最高速至零速的列车控制减速线为一条连贯 和光滑的曲线,列车实际减速运行线只要在常用制动控制线以下就可以了, 列车超速碰撞了常用制动速度控制线,设备报警并自动实施常用制动,如 继续超速碰撞了紧急制动速度控制线,则引发紧急制动,因为速度控制是 连续的,全程监控的,所以不会超速太多,紧急制动的停车点不会冒出闭 塞分区,可以不需增加一个闭塞分区作为安全防护区段,当然设计时会在 停车点与自标点之间留有一定的安全距离。
• 当列车经过地面无源应答器上方时,无源应答器接收到车载天线发射的电 磁能量后,电子电路工作,把存储的1023位数据报文循环发送出去,直 至电能消失。
• 车载天线将接收到的数据报文传送给应答器传输模块(BTM),经过滤波、 放大、解调后,对接收到的数据报文进行解码,还原得到用户报文,然后 发给车载列控设备。
• 级间转换分界标设在级间转换应答器组对应的线路左侧,为涂有白底色、 黑框、写有黑“C2”(或C0)字样的反光菱形板标志。如下图:
车站值班员操作
一、岗位职责
二、岗位基本作业
• 2.收集资料
• 3.参加点名
CTCS2列控系统概述资料
► 列车在ATP监控下运行,司机对安全负责。每运行一段距离
(100-200m)或一段时间(60秒),司机应重复按压按钮, 否则设备制动停车。
2018/10/21
中国铁路通信信号集团公司研究设计院
目视行车模式(OS)
速度(km/h)
控车曲线
20
轨道电路故障
2018/10/21
中国铁路通信信号集团公司研究设计院
中国铁路通信信号集团公司研究设计院
总体设计原则
►在我国既有成熟信号系统技术设备基础上
(如:自动闭塞、机车信号、车站联锁、调
度集中等),通过适当增加其它信号设备
(如:应答器、列控车载设备),构成具有
先进连续速度控制功能并符合国际列控系统 功能需求规范(ETCS)的列控系统。 ►考虑建设周期的长期性,系统应与既有线 信号系统具有良好的兼容性。
2018/10/21
中国铁路通信信号集团公司研究设计院
引导接车模式(CO)
速度(km/h)
200
监控曲线
2
0
HB 码
► 引导接车,ATP车载设备收到接近区段的轨道电路信息 (HB码),形成并保持固定限制速度,监控列车运行。
2018/10/21
中国铁路通信信号集团公司研究设计院
目视行车模式(OS)
2018/10/21
中国铁路通信信号集团公司研究设计院
部分监控模式(PS)
► 当由于为车载设备提供线路数据的某部分出现故障 或者由于系统配置结构决定的线路数据缺损而使得 车载设备无法按照完全监控模式运行,但轨道电路 能正确给出进路开通状态信息时,车载设备采用的 一种工作模式
► 在待机模式下,司机一按压启动开关就进入PS模式
2018/10/21
CTCS2系统原理、车载设备介绍

BEIJING HOLLSYS CO.,LTD.
列控车载设备(ATP)总体结构-BTM和BTM天线
C T C S
BTM单元通过BTM天线,接收来自地面应答器线路数据 ;
将正确的信息传输至安全计算机 ;
来自应答器的数据包括线路参数信息、进路信息、临时限速信息 以及级间切换等信息 ;
CTCS2系统原理
C T C S 总体描述 系统构成-地面设备
2
系 统 原 理
系统构成-车载设备
列控系统框图
ATP控车范围
2014-6-25
3
BEIJING HOLLSYS CO.,LTD.
1、总体描述
CTCS-2是基于点式应答器、轨道电路传输列车运行控制信息的点连式系统。
C T C S
2015122260aabbccddeeff待机待机完全监控完全监控部分部分监监控控目目视视行行车车调车调车隔离隔离11待机待机启动键启动键调车键调车键停车停车隔离隔离隔离隔离22完全完全监监控控侧线发车时侧线发车时应答器信息丢应答器信息丢失失引导接车引导接车目视键目视键停车停车22分分停车信停车信调车键调车键停车停车隔离隔离隔离隔离33部分部分监监控控通过应答器通过应答器时确定位置时确定位置目视键目视键停车停车22分分停车信停车信调车键调车键停车停车隔离隔离隔离隔离44目目视视行行车车允许行车信允许行车信息息确定位确定位允许行车信息允许行车信息未确定位置未确定位置调车键调车键停车停车隔离隔离隔离隔离55调车调车调车键调车键接接收收132132包包缓缓隔离隔离隔离隔离66隔离隔离隔离隔离正常正常ccttccss22车车ctcsctcs22级各工作模式之间的切换级各工作模式之间的切换注
CTCS2系统原理、车载设备介绍

1 传输方式
无线电传输或光纤传输。
2 信息处理速度
最高可达200km /h 。
3 信息传递距离最远可达2000米。来自车载设备的应用和发展前景
目前,CTCS2系统已经在我国高速铁路上得到了广泛应用。随着我国高速铁路 网的不断完善,CTCS2系统的设备和技术将会不断更新和升级,为高效、安全、 舒适的铁路运输提供更好的支撑。
功能
• 无线电通信 • 自动列车保护 • 自适应控制
特点
• 车载化 • 高可靠性 • 精简化
车载设备的分类
司机室设备
包括控制台、显示器、键盘、通信设备等。
客车设备
包括旅客信息终端、电视、广播等。
车辆设备
主要包括接收机、GPS等车辆主控单元。
固定设备
包括信号设备、道岔设备、联锁设备等固定设备。
车载设备的技术参数
特点
高度自动化、高效率、精确度高,能有效提高高铁行车安全和运行效率。
CTCS2系统的原理
无线电信号
通过铁路信道的无线电信号到达车载设备。
电路控制
车载设备解码、识别、处理无线电信号,再进行踏 面牵引控制、制动控制等车辆控制操作。
地面设备
路段联锁、道岔控制等地面设备的信号保证了铁路 运输的安全和运行效率。
CTCS2系统原理、车载设 备介绍
为确保高铁行车安全、稳定、高效,CTCS2系统应运而生。接下来,我们将介 绍CTCS2系统的概述、原理和组成部分,以及车载设备的功能、分类、技术参 数和应用前景。
CTCS2系统的概述
定义
CTCS2(Chinese Train Co ntro l System Level 2)全称中国铁路列车控制系统二级,是一 种列车自动保护及控制系统,可对高速铁路列车进行统一调度控制和安全保障。
CTCS2列控系统简介

既有线时速200公里电务新技术培训教材CTCS2列车控制系统简介2006年10月既有线200km/h动车组CTCS2列控系统由地面和车载设备两部分组成。
地面设备由列控中心、K5B计算机联锁、CTC、ZPW-2000A轨道电路和应答器等设备组成。
车载设备安装在动车组上,ATP车载设备由车载安全计算机、轨道信息接收单元(STM)、应答器信息接收单元(BTM)、制动接口单元、记录单元、人机界面(DMI)、速度传感器、轨道信息接收天线、应答器信息接收天线等组成。
ATP车载设备根据地面设备提供的信号动态信息、线路静态参数、临时限速信息及有关动车组数据,生成控制速度和目标距离模式曲线,控制列车运行。
同时,记录单元对列控系统有关数据及操作状态信息实时动态记录。
CTCS2列控系统设备构成见下图。
CTCS2列控系统设备构成图从上图可以看出,CTCS2级区段地面信号系统中除了通过轨道电路向列车传输连续信息外,还要通过应答器把地面的一些线路静态数据、临时限速以及进路参数等发送到机车上,以保障列车安全行驶。
第一章列控系统地面设备列控系统地面设备主要由车站列控中心、应答器设备、ZPW-2000轨道电路等组成。
第一节车站列控中心(TCC)车站列控中心设置在各车站机械室,是一套二乘二取二安全计算机系统,它与K5B计算机联锁、CTC车站自律机接口,根据调度命令、进路状态、线路参数等产生进路及临时限速等相关控车信息,通过安装在进、出站口的有源应答器传送给列车。
CTC调度中心的调度员向车站自律机发送临时限速命令(包括操作员姓名、命令号、限速起点、限速终点、限速级别、线路号和预计限速时间长度等相关内容),经车站值班员签收确认后,将限速命令发送给列控中心;列控中心通过P口与自律机通信,接收来自CTC的限速命令,并对收到的数据进行有效性检查;同时通过Q口与计算机联锁系统通信,获取进路信息、股道信息、区间运行方向信息,根据这些信息和限速命令在报文存储器内检索到相应报文,通过S口发送给LEU;LEU装设在列控中心机柜内,实时接收列控中心传送的数据报文并通过应答器数据传输电缆,送给对应室外有源应答器,实时更新有源应答器的数据,实现应答器对变化数据的发送。
第6章列车自动驾驶系统

第6章 列车自动驾驶系统ATO目录第1节 列车自动驾驶系统概述 (2)第2节 ATO系统的组成 (3)一、ATO系统车载设备 (3)二、列车自动驾驶系统地面设备 (6)第3节 ATO驾驶模式与模式转换 (7)一、列车驾驶模式 (7)二、列车驾驶模式转换 (9)第4节 ATO系统的功能及其工作原理 (9)一、 ATO系统基本控制功能 (10)2. ATO系统服务功能 (12)第1节 列车自动驾驶系统概述人工驾驶列车运行时,列车驾驶员操纵列车驾驶手柄,控制列车运行,实现列车加速、减速和停车。
列车自动驾驶系统,即ATO系统,主要实现“地对车控制”,实现正常情况下高质量的自动驾驶,提高列车运行效率,提高列车运行舒适度,节省能源。
列车自动驾驶系统实现列车自动驾驶,它需要列车自动防护系统ATP和列车自动监控系统ATS提供支持。
•列车自动防护系统向列车自动驾驶系统提供列车的运行速度、线路允许速度、限速和目标速度,以及列车所处位置等基本信息;•列车自动监控系统向列车自动驾驶系统提供列车运行作业和计划。
列车自动驾驶系统取代驾驶员人工驾驶,实现列车自动驾驶,有效地提高了列车的运营效率,降低了驾驶员的劳动强度,是城市轨道交通运营作业自动化的重要体现。
列车自动驾驶系统对列车进行控制,使得列车驾驶处于最佳的运行状态,列车运行更加平稳,可以有效提高运营效率,降低列车运行能耗。
第2节 ATO系统的组成列车自动驾驶系统是非故障-安全系统,由车载设备和地面设备组成。
一、ATO系统车载设备车载设备包括:车载ATO模块、ATO车载天线、人机界面。
(1)车载ATO模块车载ATO模块从车载ATP子系统获得必要的信息,如列车运行速度和列车位置等,车载ATO模块软件对这些数据进行实时处理,计算出列车当前所需的牵引力或制动力,向列车发出请求,列车牵引或制动系统收到请求指令后,对列车施加牵引或制动,对列车进行实时控制。
车载ATO模块与列车的牵引和制动系统相互作用,实现列车在站台区精确对位停车。
列车自动驾驶系统

2019/3/21
20
四、列车自动驾驶系统基本操作
在驾驶室内,列车的状态显示单元上,有“ATO模式指示 灯”。驾驶员将列车驾驶模式选择开关置于ATO挡位,系统正 常运行情况下,ATO模式指示灯会点亮。列车在车站完成停站, 关好车门后,根据系统的设置,驾驶员可以按“发车按钮”或 直接由系统自动发车,列车自动驾驶系统对列车进行控制,自 动运行到下一运营车站。 列车在自动驾驶模式下运行,列车驾驶员需要观察列车的运 行状态,如果出现列车控制系统故障情况,需及时采取措施, 如按压紧急停车按钮,使列车及时停止运行以排除故障,保证 运营安全。
列车自动驾驶系统
知识要点
:了解列车自动驾驶系统设备组成。
:掌握列车自动驾驶系统基本功能及 人机 界面信息。 :了解列车自动驾驶系统站台精确停 车功能。
一、列车自动驾驶系统概述
人工驾驶列车运行时,列车驾驶员操纵列车驾驶手柄, 控制列车运行,实现列车加速、减速和停车。
列车自动驾驶系统,即ATO系统,主要实现“地对车控制”, 实现正常情况下高质量的自动驾驶,提高列车运行效率,提高 列车运行舒适度,节省能源。与ATP系统为列车运行提供安全 保障相比,ATO是提高城市轨道交通列车运行水平的技术措施。
广州无人驾驶列车.flv
2019/3/21
23
在自动驾驶模式下,必须具备下列条件,列车才能从车站 出发: 1)与ATP有效的通信(即无连接故障); 2)有效的目的地ID; 3)有效的轨道电路ID(来自ATP); 4)有效的驾驶员ID: 5)非零速限制(来自ATP); 6)有效的车辆方向——东/西(来自ATP); 7)在出发测试期间没有检测到故障; 8)列车必须位于车站轨道电路、折返轨道电路、车辆段转 换轨电路或试车线。
CTCS2系统原理、车载设备介绍课件

CTCS2系统接口标准
CTCS2系统采用严格的接口标准,以确保各个部分设备之间的兼容性和互操作性。
1 通信标准
CTCS2系统采用国际标准 的通信模式和协议,以确 保通信的高效、稳定和可 靠。
2 控制标准
CTCS2系统采用统一的控 制标准,可以方便设备之 间的配置和管理。
3 数据标准
CTCS2系统采用规范的数 据格式和结构,以便各个 部分设备之间的数据共享 和传输。
CTCS2车载设备介绍
CTCS2车载设备是用于列车自动化控制的重要部件,具有多种不同的类型和规格。
车载处理器
CTCS2车载处理器是具有高精度计算功能的重要 部件,负责对列车状态和控制信息进行分析处理。
列车制动装置
列车制动装置是CTCS2的关键部件之一,负责列 车制动系统的控制和操作,确保列车行驶安全。
2 自动化控制
列车牵引装置和列车制动装置可以实现自动 化控制,提高行车效率和安全性。
3 可靠性
车载设备的多模式通信技术和列车状态监控 能力,以及车载通信装置的可靠性,为列车 的运行提供了保障。
4 适应性
车载设备采用模块化设计,不同型号和规格 的设备能够在不同的列车类型中得到应用。
CTCS2车载设备应用场景
CTCS2系统通信原理
CTCS2系统的通信原理是利用多种技术和设备实现的。
天线
天线在CTCS2系统中起着重要作 用,通过天线进行驾驶员和监控 中心之间的通信。
卫星通信
CTCS2系统通过卫星进行通信, 覆盖面积广,数据传输速度快。
基站
基站是CTCS2系统的核心设备, 确保信号的可靠传输和接收。
CTCS2系统等级分类
3 技术优势
CTCS2系统具有很强的技术优势,将会得到更加广泛的应用于高速铁路、城际铁路、地铁和轻轨等列车上的新型控制设备。
列车运行自动控制(ATC)系统 (2) ppt课件
ATC 系统的组成
ATC 系统的设备组成 现场轨旁设备、车载信号设备、控制中心及车站信
号设备 ATC系统的功能组成 ATO、ATS、ATP
ATC系统控制框图
ATS系统
监控作用,相当于控制中心本身,在出现故障时,由 控制中心替代 功能:收集,绘画列车运行信息
指挥列车运行,包括进路安排 调整列车运行
ATS子系统根据联锁信息,列车自动办理进路。用 以指挥和监督列车的运行。它根据列车运行计划, 制定实时运行图,指挥列车的运行,包括办理列 车进路,控制列车发车时间,改变运行区间的模 式等;同时实时收集列车运行信息及线路的各种 信息,包括车次号、目的地号。由控制中心计算 机系统进行实时跟踪,并显示在中心表示盘上。
ATP系统
防护作用 功能:监督列车运行速度,检查列车位置
监督车门和屏蔽门开关 道岔区段检查进路安全
ATO系统
自动运行 功能:自动运行
定点停车 开关车门
中央控制室
功能
(1)停车点防护 (2)速度监督与超速防护 (3)列车间隔控制 (4)测速与测距 (5)车门控制 (6)其他功能:紧急停车、给出发车命令、列车倒退控
转换 (8)记录运行信息
ATS——列车自动监控子系统
ATS子系统主要实现对列车运行的监督和控制,辅 助行车调度人员对全线列车运行进行管理。
它给行车调度人员显示全线列车的运行状态,监 督和记录运行图的执行情况,在列车因故偏离运 行图时及时做出反应(提出调整建议或者自动修 整运行图)。
通过ATO的接口,向旅客提供运行信息通报(列车 到达、出发时间、运行方向、中途停靠站名……)。
1.固定闭塞 2.准移动闭塞
3.移动闭塞
(1)固定闭塞ATC系统 固定闭塞ATC系统是指基于传统轨道电路的自动
列车全自动自动驾驶系统结构和功能

列车全自动自动驾驶系统结构和功能1. 引言咱们今天聊聊列车全自动自动驾驶系统,听起来有点高大上,其实说白了就是让列车自己开,像是给它装了一个“大脑”。
嘿,你想想,这可真是未来科技的一个缩影,仿佛进入了科幻电影的场景!那么,这样的系统究竟长什么样子,能干啥呢?2. 系统结构2.1 感知系统首先,说到感知系统,咱们得给它一个响亮的名号——“眼睛”。
没错,列车要开得稳,得先“看清”前面的路。
这个“眼睛”可不仅仅是普通的摄像头噢,还得有激光雷达、红外传感器等等,简直就像大海捞针,能把周围的一切尽收眼底。
列车动动脑筋,通过这些设备实时监测路线、障碍物,确保安全运行。
2.2 控制系统接下来就是控制系统,大家可以理解成“指挥官”,它负责接收感知系统传来的信息,然后做出决策。
比如,前面有个小猫悠然自得地横穿铁路,它可得立马做出反应,既不能让小猫受伤,也不能影响正常行驶。
这个“指挥官”里边可是蕴含了复杂的算法,怎么说呢,就像大厨调配菜谱,各种材料都得恰到好处,才能做出绝妙的佳肴。
3. 功能特点3.1 安全性咱们这系列说到的,其实最关键的功能就是安全性。
你想啊,列车开得再快,要是没有安全保障,那可真是“纸上谈兵”了!全自动系统的好处就是可以避免人为失误,配合严密监控,降低事故率。
就像是让列车平稳地走在“人生的路上”,风里雨里都不怕。
3.2 效率然后,如果聊到效率,大家肯定会想到,列车开得快可真是好事!这个自动驾驶系统正好可以优化调度,提高运输效率。
想象一下,繁忙的早高峰中,列车能够实现无缝对接,所有乘客都能顺畅上车,下车,这种感觉可比飞起来还爽!有了这种系统,咱们的出行就像在喝咖啡一样顺畅,轻松惬意,简直是“如沐春风”。
4. 未来展望4.1 发展趋势说到未来,这个全自动驾驶系统毫无疑问是大势所趋。
你看,如今越来越多的城市开始引入这样的技术,让人们的出行体验越来越好。
有的地方甚至开始实现无人驾驶列车的试运行,简直就像是在玩游戏,代入感满分!4.2 社会影响当然,这种技术不仅仅影响到乘客,也会改变整个运输行业的生态。
CTCS2和CTCS0的区别文档资料

CTCS-2的简介:
• CTCS-2级列车控制系统是基于轨道电路和 应答器传输列车运行信息的点连式系统, 是采用目标距离模式监控列车安全运行的 列车运行控制系统。
7
CTCS-2的功能:
• 1、载频切换功能 • 2、速度、距离计算及防滑防空转 • 3、数据记录 • 4、位置校正 • 5、应答器信息接收与处理 • 6、与乘务员进行信息交互 • 7、设备制动优先和司机制动优先 • 8、防溜功能
2 点式信息设备:设置在车站附近,主要用于向车载设 备传输定位信息。
2
车载子系统组成:
1 主体机车信号:完成轨道电路信息的接收与处理。 2 点式信息接收模块:完成点式信息的接收与处理。 3 安全型运行监控记录装置:实时检测列车运行速度,对列
车运行控制信息进行综合处理,控制列车按命令运行。
3
4
CTCS的分级
CTCS的概述:
CTCS就是中国列车运行控制系统( ChineseTrain Control System),由地面子系 统和车载子系统构成。
1
地面子系统的组成:
1 轨道电路:完成列车占用检测及列车完整性检查,连 续向列车传送控制信息。车站正线采用与区间同制式 的轨道电路,侧线采用与区间同制式的叠加电码化设 备。
8
列控系统等级比较表
CTCS等级
地面设备组成 车载设备组成 地对车信息传输 闭塞方式 适用区段
CTCS-0级
CTCS-2级
轨道电路
Hale Waihona Puke 车站列控中心,轨道电路, 应答器及LEU
通用机车信号,运行监控记 ATP(含机车信号,应答器信
录装置(LKJ)
息接收功能),LKJ
多信息轨道电路
简述列车自动控制系统的组成和各组成子系统功能
简述列车自动控制系统的组成和各组成子系统功能列车自动控制系统(Train Control System,简称BTC)是一种新型列车运行控制系统,由多个子系统组成,包括信号系统、自动控制系统、通信系统、自动列车保护系统等。
本文将介绍列车自动控制系统的组成及其各组成子系统的功能。
一、信号系统信号系统是列车自动控制系统的基础,包括铁路信号、道岔信号、轨道电路等。
铁路信号用于对列车进行定位和引导,道岔信号用于切换列车行驶的方向,轨道电路用于检测轨道的状态,以便调整列车的运行轨迹。
二、自动控制系统自动控制系统是列车自动控制系统的核心技术,包括列车运行控制系统、自动驾驶系统、牵引控制系统等。
列车运行控制系统主要用于控制列车的运行速度和方向,自动驾驶系统主要用于列车的自主定位和转向,牵引控制系统主要用于列车的牵引和制动。
三、通信系统通信系统是列车自动控制系统的重要组成部分,包括列车通信、车站通信、轨道通信等。
列车通信用于列车之间的通信,包括列车运行信息交换、故障信息传递等;车站通信用于车站之间的通信,包括列车信号信息的传输、车站指令的发送等;轨道通信用于轨道之间的通信,包括列车轨迹信息的传输、轨道状态信息的传递等。
四、自动列车保护系统自动列车保护系统是列车自动控制系统的最后一个组成部分,主要用于检测和预防列车出轨等事故发生。
自动列车保护系统包括列车自动驾驶系统、轨道电路、故障检测等。
列车自动驾驶系统用于列车的自主定位和转向,轨道电路用于检测轨道的状态,故障检测用于及时发现列车的故障,以便采取相应的措施。
列车自动控制系统由多个子系统组成,包括信号系统、自动控制系统、通信系统、自动列车保护系统等。
这些子系统相互协作,共同完成列车的运行控制和安全保障任务。
随着科技的不断发展,列车自动控制系统的功能将不断扩展和完善,为人们的出行提供更加安全和高效的服务。
CTCS2系统原理、车载设备介绍

03 车载设备介绍
车载设备概述
车载设备是CTCS2系统中不可或缺的组成部分,用于实现列车与地面设备之间的信 息交互和安全控制。
车载设备主要包括ATP(列车自动防护)系统、ATO(列车自动运行)系统、TSR (临时限速)设备等。
车载设备的主要功能是接收地面设备发送的控制命令和列车状态信息,根据预设的 安全策略和逻辑判断,控制列车运行,确保列车安全、高效地运行。
成功分析了CTCS2系统的基本原理和车载设备的功能特点,为后续研究奠 定了基础。
深入探讨了CTCS2系统的信号传输机制和车载设备的控制逻辑,提高了系 统的可靠性和安全性。
针对实际应用中遇到的问题,提出了有效的解决方案,并进行了实验验证, 证明了其可行性和有效性。
研究展望和未来工作
01
进一步研究CTCS2系统的优化方案,提高系统的性 能和稳定性。
列车控制
根据列车位置和运行状态,列车控 制系统生成列车控制指令,控制列 车运行。
CTCS2系统与其他系统的比较
与CTCS3级比较
CTCS2级和CTCS3级都是中国列车控制系统的重要组成部分,但CTCS3级在技术上更加先进,可以实现列车的连 续定位和移动闭塞。
与欧洲列车控制系统(ETCS)比较
ETCS是欧洲采用的列车控制系统,与CTCS2级相比,ETCS更加开放和灵活,可以适应多种不同国家和地区的铁 路系统。
02
探索车载设备的智能化和自动化技术,以适应未来 铁路运输的发展需求。
03
加强与国内外相关机构的合作与交流,共同推动铁 路信号技术的发展和应用。
THANKS FOR WATCHING
感谢您的观看
高速铁路
CTCS2系统广泛应用于我国高速铁路,如京津城际、京沪高铁等,为列车提供安全可靠的 运行控制。
(交通运输)CTCS2列控系统概述

CTCS2列控系统的主要功能是实现列车安全追踪、列车速度 自动控制、列车运行调整和列车间隔控制等,保障列车运行 安全、高效和准时。
系统工作原理
工作原理
CTCS2列控系统通过地面设备和车载设备之间的信息交互,实现列车追踪、速度控制和间 隔控制等功能。地面设备发送列车追踪信息和速度控制指令,车载设备接收并处理这些信 息,控制列车运行。
促进产业升级和发展。
02
CTCS2列控系统概述
系统定义与特点
定义
CTCS2列控系统是中国铁路第二代列 车控制系统,用于列车运行控制和管 理。
特点
CTCS2列控系统采用目标距离控制模 式,实现列车安全追踪和自动控制; 同时,该系统还具有高精度、高可靠 性和高安全性的特点。
系统组成与功能
系统组成
CTCS2列控系统由地面设备和车载设备两部分组成。地面设备 包括轨道电路、应答器和信号机等;车载设备包括列车控制单 元(TCU)、测速单元和人机界面等。
操作复杂性
由于该系统功能强大,操作界面 相对复杂,对操作人员的专业素 质要求较高。
未来发展方向
智能化
未来CTCS2列控系统将更加注重智能 化发展,通过引入人工智能、大数据 等技术,提高系统的自主决策和优化 能力。
绿色环保
互联互通
加强与其他交通方式的互联互通,提 高运输效率,为旅客提供更加便捷、 高效的出行体验。
进行实时监测和控制,确保列车运行的安全和稳定,降低事故风险。
02
提高效率
列控系统能够实现列车的自动化控制和调度指挥,提高列车运行效率,
缩短旅行时间,为旅客提供更好的出行体验。
03
推动技术进步
列控系统的研究和应用涉及到多个领域的技术,如通信、信号处理、计
CTCS-2列控系统

车载
机车信
设备
号 LKJ
BMT
ATP
GSM-R
适应最 高速度
160 km/h
160 km/h
200-250 km/h
(理论300 km/h)
300-350 km/h
RBC GSM-R
GSM-R
高速和 特殊线路
级间转换
CTCS-2级(ATP)
CTCS-0/1级
正向预告点
切换点
反向预告点
26
级间转换
车站正线采用与区间同制式的轨道电路,侧线采用与区间 同制式的叠加电码化设备。
12
CTCS-1级
点式信息设备 宜设置在车站附近,主要用于向车载设备传输定位信息。
(2)车载子系统组成 主体机车信号
完成轨道电路信息的接收与处理。 点式信息接收模块
完成点式信息的接收与处理。 安全型运行监控记录装置
6
a.总体规划
我们在充分借鉴欧洲发展ETCS成功经验的基础 上,经过充分调查研究和专家论证,已对CTCS 作出了总体规划。中国发展CTCS技术既要兼顾 既有设备的现状,也要充分考虑未来的发展, 避免造成人力物力的浪费和制式的混乱。
7
b.系统设计
ATP是由地面信号设备和车载设备共同组成的闭环高安全系统, 是地面联锁向车载设备的延伸,在此基础实现了以车载设备 为主的行车方式。
CTCS-4级
(2) 车载子系统组成
无线通信(GSM-R)车载设备
作为系统信息传输平台完成车-地间大容量的信息交 换。
测速模块
需要时,实时检测列车运行速度并计算列车走行距离 。
设备维护记录单元
对接收信息、系统状态和控制动作进行记录。
CTCS-4级
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• • • • • 列车自动驾驶系统概述 列车自动驾驶系统设备组成 列车自动驾驶系统基本功能 列车自动驾驶系统基本操作 列车自动驾驶系统基本原理
1、列车自动驾驶系统概述
• 人工驾驶列车运行时,列车驾驶员操纵列车驾驶手柄,控制 列车运行,实现列车加速、减速和停车。列车自动驾驶系统, 即ATO系统,主要实现“地对车控制”,实现正常情况下高 质量的自动驾驶,提高列车运行效率,提高列车运行舒适度, 节省能源。与ATP系统为列车运行提供安全保障相比,ATO 是提高城市轨道交通列车运行水平的技术措施。列车自动驾 驶系统车载设备根据列车运行计划,以及列车的运行速度、 当前线路限速和目标速度等信息,实时计算列车达到目标速 度值所需要的牵引力或制动力的大小,通过列车接口电路, 由列车的牵引系统或制动系统完成对列车进行加速或减速作 业。
• 由列车ATO车载设备进行接收和处理。
•
地面信息接收发送设备的谐调控制部分安装在信号设 备室内,轨道环线安装在线路上。
列车自动运(ATO) 地面系统
ATO数据环动驾驶系统基本功能
• 列车自动驾驶系统基本功能包括列车车站发车控制、列 车区间运行控制、列车精确停站、列车自动折返、跳停 和扣车等。
• ①从列车向地面发送的信息。列车自动驾驶系统车载模 块通过ATO车载天线向地面列车自动监控系统发送的信 息有列车识别号信息,该列车识别号信息包括了列车的 车组号、车次号、目的地编码等内容;列车向地面发送 的信息还有列车运行方向、列车车门状态、车轮磨损指 示、列车车轮打滑和空转、车载ATO模块状态和报警信 息等。 ②从地面向列车ATO车载设备发送的信息。从地 面向列车ATO车载设备发送的信息有列车开关门命令、 列车车次号确认、列车测试指令、门循环测试、主时钟 参考信号、跳停/扣车指令和列车运行等级等。
•
•
1.车站发车控制功能
列车在ATO模式下运行时,列车驾驶员按压发车按钮 起动列车运行,ATO根据列车自动防护系统ATP发送的 控制速度和列车自动监控系统ATS发送的运行等级,自 动运行到下一车站。
ATO系统
•
在ATO自动模式下,必须具备一定的条件,列车才能从 车站出发,这些条件包括:
• ①ATO模块与ATP模块通信正常; • ②列车运行目的地代码有效; • ③有效的驾驶员代码; • ④在出发测试期间没有检测到故障; • ⑤列车所处的轨道电路,能够建立ATO模式; • ⑥其他必要的信息。
• (2)扣车 扣车作业是指列车在某站台停靠,不允许列 车继续运行。列车自动驾驶系统收到来自列车自动监控 系统ATS发出的扣车指令后,完成扣车作业。
6.控制车门 •
由ATP系统监督开门条件,当ATP系统给出开门命令 时,可以按照事先设定由ATO系统自动打开车门,也可 由驾驶员手动打开正确一侧的车门。车门的关闭只能由 驾驶员完成。 车门打开功能的输入来自ATP功能的车门释放、运行 方向和打开车门数据,以及来自ATS的目的地号。当列 车空车运行时,从ATS接收到的指定目的地号阻止车门 的打开。
• 列车自动驾驶系统车载设备根据列车运行计划,以及列车的运 行速度、当前线路限速和目标速度等信息,实时计算列车达到 目标速度值所需要的牵引力或制动力的大小,通过列车接口电 路,由列车的牵引系统或制动系统完成对列车进行加速或减速 作业。
• 列车自动驾驶系统实现列车自动驾驶,它需要列车自动防护系 统ATP和列车自动监控系统ATS提供支持。列车自动防护系统 向列车自动驾驶系统提供列车的运行速度、线路允许速度、限 速和目标速度,以及列车所处位置等基本信息;列车自动监控 系统向列车自动驾驶系统提供列车运行作业和计划。 • 列车自动驾驶系统取代驾驶员人工驾驶,实现列车自动驾驶, 有效地提高了列车的运营效率,降低了驾驶员的劳动强度,是 城市轨道交通运营作业自动化的重要体现。
4.跳停
• 车载ATO系统从轨旁ATC系统接收跳停指令。跳停指 令通常应在被跳停站的前一站或更早收到。车地通信子 系统还能够在完成计划停站之前告知列车中央ATC已经 发出了一个跳停该车站的命令。在被跳停车站,车载 ATO系统也能接收并响应轨旁产生的跳停指令。 如果在车站停车过程中收到跳停该车站的命令, ATO将会点亮状态显示单元上的跳停指示灯来告知驾驶 员列车不能在站台停车。在这种情况下,列车继续以 ATP控制速度进行速度调节。跳停命令可以在跳停的车 站之前的任何有轨旁通信环线的车站取消。但是,一旦 列车处于要跳停的车站的环线内时,跳停本站的命令就 不能取消。
• 图9一l中列车在ATO模式下,其实际运行速度曲线在 ATP限制速度曲线以下,在一个较小的速度范围内波动, 使得列车以接近ATP限制速度运行,最有效提高列车运 行效率,降低列车能耗,减少列车在牵引、惰行和制动 状态之间的不断切换次数,有效提高乘客的舒适度。
•
惰行可以有效降低地铁列车能耗,通过选择合适的惰行点 可以实现列车的节能运行。建立了定时约束条件下列车 节能运行惰行控制优化模型,将模型求解的遗传算法嵌入 到城市列车运行计算系统中,实现了给定线路条件下站间 最佳惰行点的自动计算。
2.列车区间运行速度控制
• 列车自动驾驶系统车载模块接收到从车载ATP发出的列 车速度控制指令后,它向列车的牵引系统或制动系统发 出请求,以施加牵引力将列车加速到控制速度,或施加 制动力使列车减速至规定值,保存列车的运行速度在一 个速度控制窗口内,如图9一l所示。
图9—1列车自动驾驶模式下的速度距离曲线
ATP车载设备接口
ATO工作原理图
• (2)ATO车载天线 列车自动驾驶系统的车载模块与地 面设备之间的信息交换是通过ATO车载天线来完成, 以实现列车自动驾驶系统与列车自动监控系统(ATS)之 间的信息交换。 • ATO车载天线一般安装在列车第一列编组的车体下, 它接收来自列车自动监控系统的信息,同时向列车自 动监控系统发送有关的列车状态信息。这些信息一般 包括以下内容:
• 列车自动驾驶系统对列车进行控制,使得列车驾驶处于最佳的 运行状态,列车运行更加平稳,可以有效提高运营效率,降低 列车运行能耗。 • 列车自动驾驶系统在站台可以精确对位停车,为乘客上下 车提供便捷的条件,列车在站台精确停车为站台加装安全门或 屏蔽门提供了有利的条件。
轨道电路信 息 人接 机界面 应 ( D答 器 信 收 STM MI ) 息接 ATP 车 收 BT 载 M 设 备
AR(自动折返Automatic return) SM(supervision management受监控的人工模式)
5.执行跳停和扣车功能
•
(1)跳停 跳停作业是指在线路上运营的列车,在某一
指定车站不停车,而以规定的速度通过该车站。列车自 动驾驶系统收到来自列车自动监控系统ATS发出的跳停 指令后,完成跳停作业。
•
5、列车自动驾驶系统基本原理
• 1.列车自动驾驶 • ATO系统存储了轨道布局和坡度信息,能够优化列车 控制命令,保证列车在ATP监督下按照最大允许速度运 行。 ATO通过地面ATP设备传来的编码确定前方空闲轨道 电路数目或前行列车位置,根据本次列车位置,列车在 综合考虑安全因素的前提下可尽量全速行驶至本次列车 的停车点。 ATO系统的自动驾驶功能是通过ATO车载 设备控制列车牵引和制动系统实现的。所需的ATP数据 包括:从ATP轨旁单元接收到的全部ATP运行命令、测 速单元提供的当前列车位置和实际速度信息、位置识别 和定位系统的信息、列车长度、ATS通过ATP轨旁单元 发送的出站命令和达到下一车站的计划时间。
3.车站精确停车
• 车站精确停车是列车自动驾驶系统非常重要的功能,它实现列 车在车站站台区精确对位停靠,可以有效提高列车运营效率, 有利于引导乘客上下车。 列车实现车站精确停车,需要列车自动驾驶车载模块与列车的 牵引系统和制动系统共同参与,相互配合。在列车接近站台时, 列车自动驾驶车载模块实时对列车的速度进行采集和 比较,并及时向列车的牵引系统和制动系统发出控制指令,实 现对列车速度的实时控制,追踪实现列车精确停车。 列车实现车站精确停车,可以在站台区安装轨道环线,提高 停车的精度。列车在站台精确停车,有利于在车站站台设置屏 蔽门或安全门,保障乘客安全候车。
•
(3)人机界面 列车驾驶员通过人机界面可以将列车运 行的模式选择为“ATO”,起动列车在ATO模式下运行。
2.列车自动驾驶系统地面设备 •
列车自动驾驶系统地面设备由地面信息接收发送设备和 轨道环线组成。这些地面设备接收来自列车ATO车载天 线所发送的信息,并把ATS有关信息通过轨道环线发送 到线路上,
2、列车自动驾驶系统设备组成
列车自动驾驶系统是非故障-安全系统,由车 载设备和地面设备组成。 1.列 车自动驾驶系统车载设备 • 列车自动驾驶系统车载设备包括车载ATO 模块、ATO车载天线、人机界面。
• (1)车载ATO模块 车载ATO模块是列车自动驾驶系统的核 心组成部分,它包含硬件和软件两部分。车载ATO模块从 车载ATP子系统获得必要的信息,如列车运行速度和列车 位置等,车载ATO模块软件对这些数据进行实时处理,计 算出列车当前所需的牵引力或制动力,向列车发出请求, 列车牵引或制动系统收到请求指令后,对列车施加牵引或 制动,对列车进行实时控制。 车载ATO模块与列车的牵引 和制动系统相互作用,实现列车在站台区精确对位停车。
1.车站发车
• 当准备在ATO模式下运行时,ATP通过通信天线接收到 关门命令,ATP点亮状态显示单元上的停站时间结束指 示灯。如果门是人工操作,驾驶员必须关好车门(否则, ATP将不允许发车)。门一旦关好,驾驶员必须按压并 释放发车按钮来让列车出发运行到下一车站。 • 在车站停车结束之后,驾驶员必须关好车门再按压并 释放发车按钮以继续运行到下一车站。一旦发车按钮被 按压,ATP发给ATO一个控制速度。
2.车门控制和停站
• 车载ATO系统通过轨旁通信环线从轨旁ATC系统接收到传送 给车辆的开门指令,通过要求车载ATP系统开启车门来启动开 门程序。驾驶员按下开门按钮打开车门。 轨旁ATC系统累计停站时间。在正常情况下,停站时间结束 后轨旁ATC系统会传送一个关门命令。车载ATO系统接收到命 令后及时励磁关门列车线。驾驶员按下关门按钮关门。 当从本地或中心接收到指令时,轨旁ATC系统会向车辆传送 一个停放制动命令。在这种情况下,车载ATO系统通过从车地 通信子系统传来的命令控制车门开闭,但在相应的停放制动缓 解以及从轨旁接收到命令之前不允许列车从该站发车。 车载ATO系统通过车地通信子系统向轨旁传送车门状态。