自动控制原理期末考试试卷及答案
自动控制原理期末考试卷与答案

自动控制原理期末考试卷与答案一、填空题(每空 1 分,共20分)1、对自动控制系统的基本要求可以概括为三个方面,即: 稳定性 、快速性和 准确性 。
2、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
3、在经典控制理论中,可采用 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判断线性控制系统稳定性。
4、控制系统的数学模型,取决于系统 结构 和 参数, 与外作用及初始条件无关。
5、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω 。
6、奈奎斯特稳定判据中,Z = P - R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时针方向包围 (-1, j0 )整圈数。
7、在二阶系统的单位阶跃响应图中,s t 定义为 调整时间 。
%σ是超调量 。
8、设系统的开环传递函数为12(1)(1)K s T s T s ++,则其开环幅频特性为2212()()1()1KA T T ωωωω=+⋅+,相频特性为01112()90()()tg T tg T ϕωωω--=---。
9、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。
10、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为1050.20.5s s s s+++。
11、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭环控制系统。
12、根轨迹起始于开环极点,终止于开环零点。
13、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。
13自动控制原理期末试卷与答案

自动控制原理1一、 单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( c )A.系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在( )上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( d )A.比较元件B.给定元件C.反馈元件D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为(a )A.圆B.半圆C.椭圆D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( d )A.比例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传 递函数为2)(5 10 s s ,则它的开环增益为(c ) A.1 B.2 C.5 D.107. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是(b ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以(b )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量9. 一阶微分环节Ts s G +=1)(,当频率T 1=ω时,则相频特性)(ωj G ∠为( a )A.45°B.-45°C.90°D.-90°10.最小相位系统的开环增益越大,其( d )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( )A.稳定B.临界稳定C.不稳定D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( )时,闭环系统临界稳定。
(完整word版)自动控制原理期末考试题
(完整word 版)自动控制原理期末考试题《 自动控制原理B 》 试题A 卷答案一、单项选择题(本大题共5小题,每小题2分,共10分) 1.若某负反馈控制系统的开环传递函数为5(1)s s +,则该系统的闭环特征方程为 ( )。
A .(1)0s s += B. (1)50s s ++=C 。
(1)10s s ++= D.与是否为单位反馈系统有关 2.梅逊公式主要用来( )。
A 。
判断稳定性B 。
计算输入误差C 。
求系统的传递函数D 。
求系统的根轨迹 3.关于传递函数,错误的说法是 ( )。
A 。
传递函数只适用于线性定常系统;B 。
传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响; C.传递函数一般是为复变量s 的真分式; D 。
闭环传递函数的极点决定了系统的稳定性。
4.一阶系统的阶跃响应( ).A .当时间常数较大时有超调B .有超调C .无超调D .当时间常数较小时有超调5。
如果输入信号为单位斜坡函数时,系统的稳态误差为无穷大,则此系统为( )A . 0型系统 B. I 型系统 C. II 型系统 D. III 型系统二、填空题(本大题共7小题,每空1分,共10分)1.一个自动控制系统的性能要求可以概括为三个方面:___、快速性、____.2。
对控制系统建模而言,同一个控制系统可以用不同的 来描述.3. 控制系统的基本控制方式为 和 。
4. 某负反馈控制系统前向通路的传递函数为()G s ,反馈通路的传递函数为()H s ,则系统的开环传递函数为 ,系统的闭环传递函数为 。
5 开环传递函数为2(2)(1)()()(4)(22)K s s G s H s s s s s ++=+++,其根轨迹的起点为6。
当欠阻尼二阶系统的阻尼比减小时,在单位阶跃输入信号作用下,最大超调量将 。
7。
串联方框图的等效传递函数等于各串联传递函数之 。
稳定性 _准确性 数学模型开环控制 闭环控制 ()()G s H s()1()()G s G s H s +0,4,1j --± 增大 积三、简答题(本题10分)图1为水温控制系统示意图。
(完整版)自动控制原理期末考试复习题及答案

(完整版)⾃动控制原理期末考试复习题及答案⼀、填空题1、线性定常连续控制系统按其输⼊量的变化规律特性可分为_恒值控制_系统、随动系统和_程序控制_系统。
2、传递函数为 [12(s+10)] / {(s+2)[(s/3)+1](s+30)} 的系统的零点为_-10_,极点为_-2__,增益为_____2_______。
3、构成⽅框图的四种基本符号是:信号线、⽐较点、传递环节的⽅框和引出点。
4、我们将⼀对靠得很近的闭环零、极点称为偶极⼦。
5、⾃动控制系统的基本控制⽅式有反馈控制⽅式、_开环控制⽅式和_复合控制⽅式_。
6、已知⼀系统单位脉冲响应为t e t g 5.16)(-=,则该系统的传递函数为。
7、⾃动控制系统包含_被控对象_和⾃动控制装置两⼤部分。
8、线性系统数学模型的其中五种形式是微分⽅程、传递函数、__差分⽅程_、脉冲传递函数_、__⽅框图和信号流图_。
9、_相⾓条件_是确定平⾯上根轨迹的充分必要条件,⽽⽤_幅值条件__确定根轨迹上各点的根轨迹增益k*的值。
当n-m ≥_2_时, 开环n 个极点之和等于闭环n 个极点之和。
10、已知⼀系统单位脉冲响应为te t g 25.13)(-=,则系统的传递函数为__。
11、当∞→ω时⽐例微分环节的相位是: A.90 A.ο90 B.ο90- C.ο45 D.ο45-12、对⾃动控制的性能要求可归纳为_稳定性__、_快速性_和准确性三个⽅⾯,在阶跃响应性能指标中,调节时间体现的是这三个⽅⾯中的_快速性___,⽽稳态误差体现的是_稳定性和准确性_。
13、当且仅当离散特征⽅程的全部特征根均分布在Z 平⾯上的_单位圆 _内,即所有特征根的模均⼩于___1____,相应的线性定常离散系统才是稳定的。
14、下列系统中属于开环控制系统的是 D.普通数控加⼯系统A.电炉箱恒温控制系统B.雷达跟踪系统C.⽔位控制系统D.普通数控加⼯系统15、某单位负反馈系统在单位阶跃信号作⽤下的系统稳态误差0=ss e ,则: B.意味着该系统的输出信号的稳态值为1 A.意味着该系统是⼀个0型系统 B.意味着该系统的输出信号的稳态值为1 C.意味着该系统没有输出信号 D.意味着该系统具有⽐较⾼的开环增益16、⼀阶系统11)(+=Ts s G 在单位斜坡信号作⽤下,系统的稳态误差为 T 。
自动控制原理期末试卷与答案
A.提高上升时间和峰值时间
B.减少上升时间和峰值时间
C.提高上升时间和调整时间
D.减少上升时间和超调量
9. 一阶微分环节 G(s) 1 Ts ,当频率 1 时,则相频特性 G( j) 为( a ) T
A.45°
ห้องสมุดไป่ตู้
B.-45°
C.90°
D.-90°
10.最小相位系统的开环增益越大,其( d )
A.振荡次数越多
Xi(s) +
K
1
X0(s)
s2
1+K1s
44.系统开环频率特性由实验求得,并已用渐近线表示出。试求该系统的开环传递函数。(设 系统是最小相位系统)。
一、
自动控制原理 2 单项选择题(每小题 1 分,共 20 分)
3
1. 系统已给出,确定输入,使输出尽可能符合给定的最佳要求,称为( )
A.最优控制
29.PID 调节中的“P”指的是
控制器。
30.若要求系统的快速性好,则闭环极点应距虚轴越_
_越好。
二、
名词解释(每小题 3 分,共 15 分)
31.稳定性
32.理想微分环节
33.调整时间
34.正穿越
35.根轨迹
三、
简答题(每小题 5 分,共 25 分)
36.为什么说物理性质不同的系统,其传递函数可能相同 ? 举例说明。
差为( )
A.0
B.0.25
C.4
D.
16.
若已知某串联校正装置的传递函数为
Gc
(s)
s 1 0.1s 1
,则它是一种(
)
A.相位超前校正 B.相位滞后校正 C.相位滞后—超前校正 D.反馈校正
大学期末考试自动控制原理题集( 附带答案)
大学期末考试自动控制原理题集(附带答案)自动控制原理1一、单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( C )A.系统综合B.系统辨识C.系统分析D.系统设计 2. 惯性环节和积分环节的频率特性在(A)上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( C ) A.比较元件 B.给定元件 C.反馈元件 D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为(A )A.圆B.半圆C.椭圆D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( B )A.比例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传递函数为10,则它的开环增益为(C )s(5s?2)A.1 B.2 C.5 D.10 7. 二阶系统的传递函数G(s)?5,则该系统是(B ) 2 s?2s?5A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统 8. 若保持二阶系统的ζ不变,提高ωn,则可以(B )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量 9. 一阶微分环节G(s)?1?Ts,当频率??1时,则相频特性?G(j?)为(A) TA.45°B.-45°C.90°D.-90° 10.最小相位系统的开环增益越大,其( D )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为D?s??s4?8s3?17s2?16s?5?0,则此系统( A ) A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:G?s??k,当k=( C)时,闭环系s(s?1)(s?5)统临界稳定。
期末考试试题集-自动控制原理(含完整答案)
自动控制原理1一、单项选择题(每小题 1 分,共20 分)系统和输入已知,求输出并对动态特性进行研究,称为1. ()2. 惯性环节和积分环节的频率特性在()上相等3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为()A. 比较元件B.给定元件C. 反馈元件D. 放大元件ω从0 变化到+ ∞时,延迟环节频率特性极坐标图为4. ()当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个()A. 比例环节B. 微分环节C. 积分环节D. 惯性环节10,则它的开环增益为(s(5s 2)期末考试- 复习重点7. A.1二阶系统的传递函数临界阻尼系若保持二阶系统B.2C.5D.10G ( s)2 sA. 提高上升时间和峰值时2s 5,则该系统是(过阻尼系 D. 零阻尼系减少上升时间和峰值时A. 系统综合B. 系统辨识C. 系统分析D. 系统设计A. 幅频特性的斜率 B. 最小幅值 C. 相位变化率 D. 穿越频率A. 圆B. 半圆 C. 椭圆 D. 双曲线5.6. 若系统的开环传递函数为C. 提高上升时间和调整时间1 T s ,当频率D. 减少上升时间和超调量1时,则相频特性G ( j )为()T9.(s)阶微分环节GA.45B. -45C.90D. -9010. 最小相位系统的开环增益越大,其(A. 振荡次数越多B. 大 稳定裕量越C. 相位变化越小D. 小 稳态误差越11. 设系统的特征方程为D s s 4D s s 8s 3 17s 20 ,则此系统16 s 5 (A. 稳定B. 临界稳定C. 不稳定D. 稳定性不确定。
12. 某单位反馈系统的开环传递函数为:k)时,闭环系统临界稳 ,当 k= ( 定。
s( s 1)( s 5)A.10B.20C.30D.4013. 设系统的特征方程为3s43210s 5s s2 0 ,则此系统中包含正实部特征的个数有(A.0B.1C.2D.314. 单位反馈系统开环传递函 数为A.2B.0.2G s s C.0.5,当输入为单位阶跃时,则其位置误差为(sD.0.0515. 若已知某串联校正装置的传递函数为G c (s)A. 反馈校正B. 正s 1 ,则它是一种( 10s 1相位超前校 C. 相位滞后—超前校正D. 正 相位滞后校16. 稳态误差 ess 与误差信号 E( s) 的函数关系为()A. e ss lim E(s) s 0 C. e ss lim E(s) s limB. e ss sE(s)s 0 lim D. e sssE(s) 17. 在对控制系统稳态精度无明确要求时,为提高系统的稳定减小增益 超前校正 滞后校正 D. 滞后 - 超前18. 相位超前校正装置的奈氏曲线为(A. 圆B. 上半圆C. 下半圆D.45 °弧线K19. 开环传递函数为G(s)H( s)=3 s (s, 则实轴上的根轨迹为(C.(- ∞,A.(-3 ,∞ ) B.(0 ,∞ ) 3)20. 在直流电动机调速系统中,霍尔传感器是用作( A. 电压 B. 电流 C. 位移 D. 速度 二、填空题(每小题 1 分,共 10 分)21闭环控制系统又称 .为 系统。
自动控制原理期末考试试卷六套 (答案详解)
42.建立图示系统的数学模型,并以传递函数形式表示。
43.已知系统的传递函数 ,试分析系统由哪些环节组成并画出系统的Bode图。
44.电子心率起搏器心率控制系统结构如图所示,其中模仿心脏的传递函数相当于一个纯积分环节,要求:
3)离虚轴的闭环极点对瞬态响应影响很小,可忽略不计;(1分)
4)要求系统动态过程消失速度快,则应使闭环极点间的间距大,零点靠近极点。即存5)在偶极子;(1分)
5)如有主导极点的话,可利用主导极点来估算系统的性能指标。(1分)
五、计算题(第41、42题每小题5分,第43、44题每小题10分,共30分)
39.什么是偏差信号?什么是误差信号?它们之间有什么关系?
偏差信号:输入信号与反馈信号之差;(1.5分)误差信号:希望的输出信号与实际的输出信号之差。(1.5分)
两者间的关系: ,当 时, (2分)
40.根轨迹的分支数如何判断?举例说明。
根轨迹S平面止的分支数等于闭环特征方程的阶数,也就是分支数与闭环极点的数目相同
B.输入量
3.直接对控制对象进行操作的元件称为()
A.给定元件B.放大元件D.执行元件C.比较元件
4.某典型环节的传递函数是 ,则该环节是()
A.比例环节B.惯性环节C.积分环节D.微分环节
5.已知系统的单位脉冲响应函数是 ,则系统的传递函数是()
A. B. C. D.
6.梅逊公式主要用来()
A.判断稳定性B.计算输入误差
17.进行串联超前校正前的穿越频率 与校正后的穿越频率 的关系,通常是()
B. >
18.已知系统开环传递函数 ,则与虚轴交点处的K*=()
自动控制原理期末考试卷与答案

自动控制原理期末考试卷与答案一、填空题(每空 1 分,共20分)1、对自动控制系统的基本要求可以概括为三个方面,即: 稳定性 、快速性和 准确性 。
2、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
3、在经典控制理论中,可采用 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判断线性控制系统稳定性。
4、控制系统的数学模型,取决于系统 结构 和 参数, 与外作用及初始条件无关。
5、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω. 6、奈奎斯特稳定判据中,Z = P — R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时针方向包围 (-1, j0 )整圈数。
7、在二阶系统的单位阶跃响应图中,定义为 调整时间 。
%σ是超调量 。
8、设系统的开环传递函数为12(1)(1)Ks T s T s ++,则其开环幅频特性为2212()()1()1KA T T ωωωω=+⋅+,相频特性为01112()90()()tg T tg T ϕωωω--=---。
9、反馈控制又称偏差控制,其控制作用是通过给定值 与反馈量的差值进行的。
10、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s )为1050.20.5s s s s+++。
11、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭环控制系统。
12、根轨迹起始于开环极点,终止于开环零点。
13、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。
自动控制原理期末考试卷含答案

自动控制原理期末考试卷与答案一、填空题(每空 1 分,共 20 分)1、对自动控制系统的基本要求可以概括为三个方面,即:稳定性 、快速性和 准确性 。
2、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
3、在经典控制理论中,可采用 劳斯判据 (或:时域分析法 )、根轨迹法或奈奎斯特判据 (或:频域分析法 ) 等方法判断线性控制系统 稳定性。
4、控制系统的数学模型,取决于系统结构 和 参数 , 与外作用及初始条件无关。
线性系统的对数幅频特性,纵坐标取值为 20lg A( )(或: L( )) ,横坐标为 lg。
0 1 1( ) 900 tg 1(T 1 ) tg 1(T 2 )。
9、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。
10 10、若某系统的单位脉冲响应为 g(t) 10e 0.2t 5e 0.5t,则该系统的传递函数 G(s)为 。
s 0.2s s 0.5s 11、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制 装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭 环控制系统。
12、根轨迹起始于开环极点,终止于开环零点。
13、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。
判断一个闭环线性控制系统是否 稳定,在时域分析中采用劳斯判据;在频域分析中采用奈奎斯特判据。
14、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值越频率 c对应时域性能指标 调整时间 t s ,它们反映了系统动态过程的快速性 二、(8 分)试建立如图 3 所示电路的动态微分方程,并求传递函数。
图3 解: 1、建立电路的动态微分方程 根据 KCL 有 u i (t) u 0(t) C d[u i (t) u 0(t)] u 0(t) R 1 dt R 2(2分)R 1R 2C du 0(t) (R 1 R 2)u 0(t) R 1R 2C du i (t) R 2u i (t) 1 2 dt 1 2 0 1 2 dt 2 i (2分)2、求传递函数 对微分方程进行拉氏变换得5、奈奎斯特稳定判据中, Z = P - R ,其中 P 是指 开环传函中具有正实部的极点的个数, 的个数, R 指 奈氏曲线逆时针方向包围 (-1, j0 )6、 整圈数。
自动控制原理期末试卷及答案
自动控制原理期末试卷一、简答:(共30分,每小题10分)1、说明闭环控制系统的基本组成,并画出其典型结构方框图。
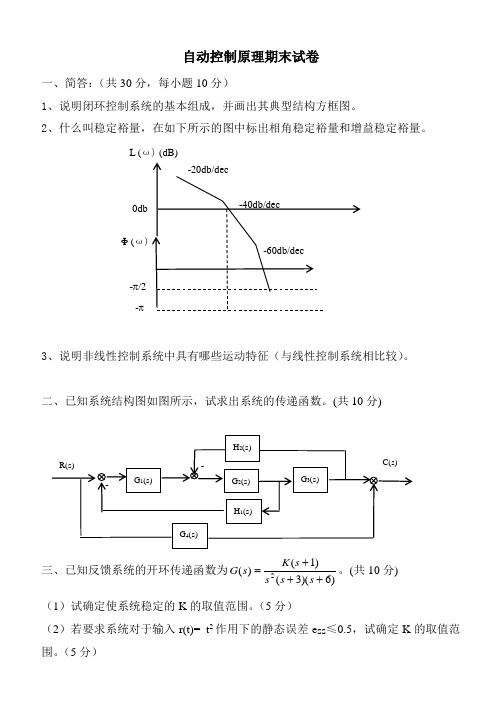
2、什么叫稳定裕量,在如下所示的图中标出相角稳定裕量和增益稳定裕量。
3、说明非线性控制系统中具有哪些运动特征(与线性控制系统相比较)。
二、已知系统结构图如图所示,试求出系统的传递函数。
(共10分)三、已知反馈系统的开环传递函数为)6)(3()1()(2+++=s s s s K s G 。
(共10分) (1)试确定使系统稳定的K 的取值范围。
(5分)(2)若要求系统对于输入r(t)= t 2作用下的静态误差e SS ≤0.5,试确定K 的取值范围。
(5分)四、已知最小相位系统开环对数幅頻特性图如图所示,写出相应的传递函数。
(共10分)五、已知单位负反馈系统的开环传递函数为 )1)(1()(21++=s T s T s Ks G 。
(共10分)(1)试概略画出G (s )对应的Nyquist 图。
(5分) (2)由Nyquist 稳定判据给出闭环系统稳定的条件。
(5分) 六、已知系统的开环传递函数为)1()3(2)(+++=s s s s K s G )(绘制负反馈的根轨迹图,并确定使系统处于欠阻尼的K 值范围。
(共15分) 七、某采样控制系统的结构如图所示,已知τ=1,求: (1)求系统的脉冲传递函数。
(10分) (2)求系统稳定的K 值范围。
(5分)答案一、 简答:(共30分,每小题10分)1、答案:闭环控制系统的基本组成:检测元件、比较元件、放大元件、执行元件、给定元件、校正元件及被控对象。
(共6分,除被控对象外,每一个元件给1分)典型结构方框图(4分,可以没有局部反馈)2、答案:稳定裕量是系统距离稳定 的边界所具有的余量(5分)。
相角稳定裕量(3分)。
增益稳定裕量(2分)。
3、答案:与线性控制系统相比非线性控制系统表现出如下的特征: (1)非线性控制系统的运动不满足态的迭加原理。
自动控制原理期末试题3套及答案一套
⾃动控制原理期末试题3套及答案⼀套⾃动控制理论(A/B 卷闭卷)⼀、填空题(每空 1 分,共15分)1、反馈控制⼜称偏差控制,其控制作⽤是通过与反馈量的差值进⾏的。
2、复合控制有两种基本形式:即按的前馈复合控制和按的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联⽅式连接,其等效传递函数为()G s ,则G(s)为(⽤G 1(s)与G 2(s) 表⽰)。
4、典型⼆阶系统极点分布如图1所⽰,则⽆阻尼⾃然频率=n ω,阻尼⽐=ξ,该系统的特征⽅程为,该系统的单位阶跃响应曲线为。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为。
6、根轨迹起始于,终⽌于。
7、设某最⼩相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该系统的开环传递函数为。
8、PI 控制器的输⼊-输出关系的时域表达式是,其相应的传递函数为,由于积分环节的引⼊,可以改善系统的性能。
⼆、选择题(每题 2 分,共20分)1、采⽤负反馈形式连接后,则 ( )A 、⼀定能使闭环系统稳定;B 、系统动态性能⼀定会提⾼;C 、⼀定能使⼲扰引起的误差逐渐减⼩,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提⾼系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引⼊串联超前校正装置。
3、系统特征⽅程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平⾯闭环极点数2=Z 。
4、系统在2)(t t r =作⽤下的稳态误差∞=ss e ,说明 ( )A 、型别2B 、系统不稳定;C 、输⼊幅值过⼤;D 、闭环传递函数中有⼀个积分环节。
5、对于以下情况应绘制0°根轨迹的是( )A 、主反馈⼝符号为“-” ;B 、除r K 外的其他参数变化时;C 、⾮单位反馈系统;D 、根轨迹⽅程(标准形式)为1)()(+=s H s G 。
期末考试试卷试题集自动控制原理含完整包括答案.docx
WORD格式.期末考试 - 复习重点自动控制原理1一、单项选择题(每小题 1 分,共20 分)1.系统和输入已知,求输出并对动态特性进行研究,称为()A. 系统综合B. 系统辨识C. 系统分析D. 系统设计2.惯性环节和积分环节的频率特性在()上相等。
A. 幅频特性的斜率B. 最小幅值C. 相位变化率D. 穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为()A. 比较元件B.给定元件C. 反馈元件D. 放大元件ω从 0变化到 + ∞时,延迟环节频率特性极坐标图为4. ()A. 圆B.半C. 椭圆D. 双曲线圆5.当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个()A. 比例环节B. 微分环节C. 积分环节D. 惯性环节10,则它的开环增益为6. 若系统的开环传递函数为()s(5s2)A.1B.2C.5D.1057. 二阶系统的传递函数G ( s),则该系统是()A. 临界阻尼系s22s 5D. 零阻尼系B. 欠阻尼系统 C. 过阻尼系统统统8.若保持二阶系统的ζ 不变,提高ω n,则可以()A. 提高上升时间和峰值时间B. 减少上升时间和峰值时间C. 提高上升时间和调整时间D. 减少上升时间和超调量9. 一阶微分环节 G1(s) 1 Ts ,当频率时,则相频特性 G ( j) 为()TA.45 °B. -45 °C.90 °D. -90°专业资料整理WORD格式.....专业资料整理WORD格式.10.最小相位系统的开环增益越大,其()B.稳定裕量越A. 振荡次数越多大D.稳态误差越C. 相位变化越小小11. 设系统的特征方程D ss48s3 17s 20 ,则此系统为16 s 5 ()A. 稳定B.临界稳C. 不稳定D. 稳定性不确定。
定k)时,闭环系统临界稳12. 某单位反馈系统的开环传递函数为:G s,当 k= (定。
《自动控制原理》A卷期末考试试题及参考答案

考生答题不得过此线∶∶∶∶∶∶∶∶∶∶∶∶∶∶密∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶封∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶线∶∶∶∶∶∶∶∶∶∶∶∶∶∶ 任课教师:教学班号:姓名:学号:∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶装∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶订∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶线∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶红河学院成人高等学历教育2021学年春季学期电气工程及其自动化(2019级高起本/2020级专升本)《自动控制原理》课程期末考试试卷卷别: A 卷考试单位: 工学院 考试日期: 年 月 日一、填空题(每空1 分,共 15 分)1.闭环系统工作的本质机理是:将系统的 信号引回到输入端,与输入信号相比较,利用所得的 信号对系统进行调节,达到减小或消除 的目的。
2.在二阶系统阶跃响应中,不同的阻尼系数有不同的响应特征。
当ξ 时,二阶系统的阶跃响应为单调上升曲线;ξ 时,其响应为衰减振荡曲线; ξ 时,其响应为等幅振荡曲线,此时系统 。
3.传递函数的定义是在 条件下,线性定常系统 拉氏变换与 拉氏变换之比。
4.应用迟后网络进行串联校正主要是利用迟后网络的 特性。
5.对于Ⅱ型系统,在给定的阶跃输入信号下,其稳态误差为 。
6.设惯性环节的时间常数为3s ,当要求误差范围∆=0.05时,t s = 。
7.若系统的根轨迹与虚轴相交,则意味着闭环特征方程出现 ,此处的根轨迹增益也称为 根轨迹增益。
二、分析计算题(共 85 分) 1.(本题15分)已知单位反馈系统的单位阶跃响应为()601010.2 1.2t t c t e e --=+-,求:(1)开环传递函数G (s );(2)系统的阻尼比ξ及自然频率ωn 。
(60024.5=)2.(本题10分)试用梅逊增益公式求下图所示系统的闭环传递函数。
3.(本题10分)下图为水温控制系统示意图。
冷水在热交换器中由通入的蒸汽加热,从而得到一定题 号 一二 总分 得 分得 分 评卷人考 生 答 题 不 得 过 此 线∶∶∶∶∶∶∶∶∶∶∶∶∶∶密∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶封∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶线∶∶∶∶∶∶∶∶∶∶∶∶∶∶ 任课教师:教学班号: 姓名: 学号:∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶装∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶订∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶线∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶∶温度的热水。
自动控制原理期末试题及答案
参考答案及评分标准一、单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( C )A.系统综合B.系统辨识C.系统分析D.系统设计2。
惯性环节和积分环节的频率特性在( A )上相等.A 。
幅频特性的斜率B 。
最小幅值C 。
相位变化率 D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( C )A 。
比较元件 B.给定元件 C 。
反馈元件 D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( A )A.圆 B 。
半圆 C.椭圆 D 。
双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( B )A 。
比例环节 B.微分环节 C.积分环节 D 。
惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为( C ) A.1 B.2 C.5 D 。
107。
二阶系统的传递函数52 5)(2++=s s s G ,则该系统是( B ) A 。
临界阻尼系统 B 。
欠阻尼系统 C.过阻尼系统 D.零阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以( B )A.提高上升时间和峰值时间 B 。
减少上升时间和峰值时间C 。
提高上升时间和调整时间D 。
减少上升时间和超调量9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( A ) A.45° B 。
-45° C 。
90° D.—90°10.最小相位系统的开环增益越大,其( D )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11。
设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( A )A.稳定B.临界稳定 C 。
不稳定 D 。
稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( C )时,闭环系统临界稳定。
13自动控制原理期末试卷与答案(2)

13⾃动控制原理期末试卷与答案(2)⾃动控制原理1⼀、单项选择题(每⼩题1分,共20分)1. 系统和输⼊已知,求输出并对动态特性进⾏研究,称为( c ) A.系统综合 B.系统辨识 C.系统分析 D.系统设计2. 惯性环节和积分环节的频率特性在()上相等。
A.幅频特性的斜率B.最⼩幅值C.相位变化率D.穿越频率3. 通过测量输出量,产⽣⼀个与输出信号存在确定函数⽐例关系值的元件称为( d )A.⽐较元件B.给定元件C.反馈元件D.放⼤元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为(a ) A.圆 B.半圆 C.椭圆 D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输⼊变量时,电动机可看作⼀个( d )A.⽐例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传递函数为2)(5 10s s ,则它的开环增益为(c )A.1B.2C.5D.107. ⼆阶系统的传递函数52 5)(2++=s s s G ,则该系统是(b )A.临界阻尼系统B.⽋阻尼系统C.过阻尼系统D.零阻尼系统8. 若保持⼆阶系统的ζ不变,提⾼ωn ,则可以(b )A.提⾼上升时间和峰值时间B.减少上升时间和峰值时间C.提⾼上升时间和调整时间D.减少上升时间和超调量 9. ⼀阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( a )A.45°B.-45°C.90°D.-90° 10.最⼩相位系统的开环增益越⼤,其( d )A.振荡次数越多B.稳定裕量越⼤C.相位变化越⼩D.稳态误差越⼩11.设系统的特征⽅程为()0516178234=++++=s s s s s D ,则此系统() A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s ks G ,当k =()时,闭环系统临界稳定。
13自动控制原理期末试卷与答案
13⾃动控制原理期末试卷与答案⾃动控制原理1⼀、单项选择题(每⼩题1分,共20分)1. 系统和输⼊已知,求输出并对动态特性进⾏研究,称为( c ) A.系统综合 B.系统辨识 C.系统分析 D.系统设计2. 惯性环节和积分环节的频率特性在()上相等。
A.幅频特性的斜率B.最⼩幅值C.相位变化率D.穿越频率3. 通过测量输出量,产⽣⼀个与输出信号存在确定函数⽐例关系值的元件称为( d )A.⽐较元件B.给定元件C.反馈元件D.放⼤元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为(a ) A.圆 B.半圆 C.椭圆 D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输⼊变量时,电动机可看作⼀个( d )A.⽐例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传递函数为2)(5 10s s ,则它的开环增益为(c )A.1B.2C.5D.107. ⼆阶系统的传递函数52 5)(2++=s s s G ,则该系统是(b )A.临界阻尼系统B.⽋阻尼系统C.过阻尼系统D.零阻尼系统8. 若保持⼆阶系统的ζ不变,提⾼ωn ,则可以(b )A.提⾼上升时间和峰值时间B.减少上升时间和峰值时间C.提⾼上升时间和调整时间D.减少上升时间和超调量 9. ⼀阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( a )A.45°B.-45°C.90°D.-90° 10.最⼩相位系统的开环增益越⼤,其( d )A.振荡次数越多B.稳定裕量越⼤C.相位变化越⼩D.稳态误差越⼩11.设系统的特征⽅程为()0516178234=++++=s s s s s D ,则此系统() A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s ks G ,当k =()时,闭环系统临界稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程名称: 自动控制理论 (A/B 卷 闭卷)试卷A一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω ,阻尼比=ξ ,该系统的特征方程为 ,该系统的单位阶跃响应曲线为 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
8、PI 控制器的输入-输出关系的时域表达式是 , 其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
5、对于以下情况应绘制0°根轨迹的是( )A 、主反馈口符号为“-” ;B 、除r K 外的其他参数变化时;C 、非单位反馈系统;D 、根轨迹方程(标准形式)为1)()(+=s H s G 。
6、开环频域性能指标中的相角裕度γ对应时域性能指标( ) 。
A 、超调%σB 、稳态误差ss eC 、调整时间s tD 、峰值时间p t7、已知开环幅频特性如图2所示, 则图中不稳定的系统是( )。
系统① 系统② 系统③图2A 、系统①B 、系统②C 、系统③D 、都不稳定8、若某最小相位系统的相角裕度0γ>,则下列说法正确的是 ( )。
A 、不稳定;B 、只有当幅值裕度1g k >时才稳定;C 、稳定;D 、不能判用相角裕度判断系统的稳定性。
9、若某串联校正装置的传递函数为1011001s s ++,则该校正装置属于( )。
A 、超前校正 B 、滞后校正 C 、滞后-超前校正 D 、不能判断10、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位超前角的是:A 、 1011s s ++B 、1010.11s s ++C 、210.51s s ++D 、0.11101s s ++三、(8分)试建立如图3所示电路的动态微分方程,并求传递函数。
图3四、(共20分)系统结构图如图4所示:1、写出闭环传递函数()()()C s s R s Φ=表达式;(4分) 2、要使系统满足条件:707.0=ξ,2=n ω,试确定相应的参数K 和β;(4分)3、求此时系统的动态性能指标s t ,00σ;(4分)4、t t r 2)(=时,求系统由()r t 产生的稳态误差ss e ;(4分)5、确定)(s G n ,使干扰)(t n 对系统输出)(t c 无影响。
(4分)五、(共15分)已知某单位反馈系统的开环传递函数为2()(3)r K G s s s =+: 1、绘制该系统以根轨迹增益K r 为变量的根轨迹(求出:渐近线、分离点、与虚轴的交点等);(8分)2、确定使系统满足10<<ξ的开环增益K 的取值范围。
(7分)六、(共22分)某最小相位系统的开环对数幅频特性曲线0()L ω如图5所示:图41、写出该系统的开环传递函数)(0s G ;(8分)2、写出该系统的开环频率特性、开环幅频特性及开环相频特性。
(3分)3、求系统的相角裕度γ。
(7分)4、若系统的稳定裕度不够大,可以采用什么措施提高系统的稳定裕度?(4分)试题一答案一、填空题(每题1分,共15分)1、给定值2、输入;扰动;3、G 1(s)+G 2(s);4、2; 20.7072=;2220s s ++=;衰减振荡 5、1050.20.5s s s s +++; 6、开环极点;开环零点7、(1)(1)K s s Ts τ++ 8、1()[()()]p u t K e t e t dt T =+⎰;1[1]p K Ts+; 稳态性能 二、判断选择题(每题2分,共 20分)1、D2、A3、C4、A5、D6、A7、B8、C9、B 10、B三、(8分)建立电路的动态微分方程,并求传递函数。
解:1、建立电路的动态微分方程根据KCL 有 200i 10i )t (u )]t (u )t (d[u )t (u )t (u R dt C R =-+- (2分)即 )t (u )t (du )t (u )()t (du i 2i 21021021R dtC R R R R dt CR R +=++ (2分)2、求传递函数对微分方程进行拉氏变换得 )(U )(U )(U )()(U i 2i 21021021s R s Cs R R s R R s Cs R R +=++ (2分) 得传递函数 2121221i 0)(U )(U )(R R Cs R R R Cs R R s s s G +++== (2分) 四、(共20分)解:1、(4分) 22222221)()()(n n n s s K s K s K sK s K s Ks R s C s ωξωωββ++=++=++==Φ 2、(4分) ⎩⎨⎧=====2224222n n K K ξωβω ⎩⎨⎧==707.04βK 3、(4分) 0010032.42==--ξξπσe83.2244===n s t ξω 4、(4分) )1(1)(1)(2+=+=+=s s K s s K sK s Ks G βββ ⎩⎨⎧==11v K K β 414.12===βKss K A e 5、(4分)令:0)()(11)()()(=s s G s s K s N s C s n n ∆-⎪⎭⎫ ⎝⎛+==Φβ得:βK s s G n +=)(五、(共15分)1、绘制根轨迹 (8分)(1)系统有有3个开环极点(起点):0、-3、-3,无开环零点(有限终点);(1分)(2)实轴上的轨迹:(-∞,-3)及(-3,0); (1分)(3) 3条渐近线: ⎪⎩⎪⎨⎧︒︒±-=--=180,602333a σ (2分) (4) 分离点: 0321=++d d 得: 1-=d (2分) 432=+⋅=d d K r(5)与虚轴交点:096)(23=+++=r K s s s s D [][]⎩⎨⎧=+-==+-=06)(Re 09)(Im 23r K j D j D ωωωωω ⎩⎨⎧==543r K ω (2分) 绘制根轨迹如右图所示。
2、(7分)开环增益K 与根轨迹增益K r 的关系:⎥⎥⎦⎤⎢⎢⎣⎡+⎪⎭⎫ ⎝⎛=+=139)3()(22s s K s s K s G r r 得9r K K = (1分)系统稳定时根轨迹增益K r 的取值范围:54<r K , (2分)系统稳定且为欠阻尼状态时根轨迹增益K r 的取值范围:544<<r K , (3分) 系统稳定且为欠阻尼状态时开环增益K 的取值范围:694<<K (1分) 六、(共22分)解:1、从开环波特图可知,原系统具有比例环节、一个积分环节、两个惯性环节。
故其开环传函应有以下形式 12()11(1)(1)KG s s s s ωω=++ (2分) 由图可知:1ω=处的纵坐标为40dB, 则(1)20lg 40L K ==, 得100K = (2分)1210ωω=和=100 (2分)故系统的开环传函为 ⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+=1100110100)(0s s s s G (2分) 2、写出该系统的开环频率特性、开环幅频特性及开环相频特性:开环频率特性 0100()1110100G j j j j ωωωω=⎛⎫⎛⎫++ ⎪⎪⎝⎭⎝⎭(1分) 开环幅频特性0()A ω=(1分)开环相频特性: 110()900.10.01s tg tg ϕωω--=--- (1分)3、求系统的相角裕度γ:求幅值穿越频率,令0()1A ω== 得31.6/c rad s ω≈(3分)11110()900.10.0190 3.160.316180c c c tg tg tg tg ϕωωω----=---=---≈- (2分) 0180()1801800c γϕω=+=-= (2分)对最小相位系统0γ= 临界稳定4、(4分)可以采用以下措施提高系统的稳定裕度:增加串联超前校正装置;增加串联滞后校正装置;增加串联滞后-超前校正装置;增加开环零点;增加PI 或PD 或PID 控制器;在积分环节外加单位负反馈。
试卷B一、填空题(每空 1 分,共15分)1、在水箱水温控制系统中,受控对象为 ,被控量为 。
2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 ;含有测速发电机的电动机速度控制系统,属于 。
3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 。
判断一个闭环线性控制系统是否稳定,在时域分析中采用 ;在频域分析中采用 。
4、传递函数是指在 初始条件下、线性定常控制系统的 与 之比。
5、设系统的开环传递函数为2(1)(1)K s s Ts τ++,则其开环幅频特性为 ,相频特性为 。
6、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率c ω对应时域性能指标 ,它们反映了系统动态过程的 。
二、选择题(每题 2 分,共20分)1、关于传递函数,错误的说法是 ( )A 传递函数只适用于线性定常系统;B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响;C 传递函数一般是为复变量s 的真分式;D 闭环传递函数的极点决定了系统的稳定性。