基础机器人ppt课件 (1)
合集下载
机器人课件ppt

机器人课件
汇报人: 202X-12-31
目 录
• 机器人基础知识 • 机器人技术介绍 • 机器人编程实践 • 机器人应用案例分析 • 未来机器人展望
01
机器人基础知识
机器人的定义与分类
定义
机器人是一种能够通过预设程序 或人工智能技术自主完成一系列 复杂动作的自动化机器。
分类
根据应用领域和功能,机器人可 以分为工业机器人、服务机器人 、医疗机器人、军事机器人等。
Java
Java是一种面向对象的编程语言,具有跨平台的特性。它提 供了大量的机器人开发框架和库,如ROS(Robot Operating System),可用于构建复杂的机器人应用程序。
机器人编程环境搭建
ROS
ROS(Robot Operating System)是一个用于机器人开发的框架,提供了丰富的库和工 具,方便开发者进行机器人软件开发。ROS支持多种编程语言,包括Python、C和Java。
机器人控制技术
运动控制技术
通过对机器人的运动学和动力学 进行分析,实现对机器人的精确 控制,使其能够依照预定的轨迹
和姿态进行运动。
路径计划技术
根据机器人的任务需求,计划出 最优或次优的路径,使机器人能
够高效地完成任务。
导航控制技术
通过传感器和算法实现机器人在 复杂环境中的自主导航,使其能 够躲开障碍物并找到目标位置。
产品质量。
服务行业
服务机器人主要用于餐饮、酒 店、医疗、物流等领域,提供 便利、高效的服务体验。
农业领域
农业机器人可以实现自动化种 植、施肥、采摘等作业,提高 农业生产效率和下落劳动强度 。
航空航天
航空航天领域的机器人能够完 成高精度、高风险的装配和维 修工作,提高工作效率和安全
汇报人: 202X-12-31
目 录
• 机器人基础知识 • 机器人技术介绍 • 机器人编程实践 • 机器人应用案例分析 • 未来机器人展望
01
机器人基础知识
机器人的定义与分类
定义
机器人是一种能够通过预设程序 或人工智能技术自主完成一系列 复杂动作的自动化机器。
分类
根据应用领域和功能,机器人可 以分为工业机器人、服务机器人 、医疗机器人、军事机器人等。
Java
Java是一种面向对象的编程语言,具有跨平台的特性。它提 供了大量的机器人开发框架和库,如ROS(Robot Operating System),可用于构建复杂的机器人应用程序。
机器人编程环境搭建
ROS
ROS(Robot Operating System)是一个用于机器人开发的框架,提供了丰富的库和工 具,方便开发者进行机器人软件开发。ROS支持多种编程语言,包括Python、C和Java。
机器人控制技术
运动控制技术
通过对机器人的运动学和动力学 进行分析,实现对机器人的精确 控制,使其能够依照预定的轨迹
和姿态进行运动。
路径计划技术
根据机器人的任务需求,计划出 最优或次优的路径,使机器人能
够高效地完成任务。
导航控制技术
通过传感器和算法实现机器人在 复杂环境中的自主导航,使其能 够躲开障碍物并找到目标位置。
产品质量。
服务行业
服务机器人主要用于餐饮、酒 店、医疗、物流等领域,提供 便利、高效的服务体验。
农业领域
农业机器人可以实现自动化种 植、施肥、采摘等作业,提高 农业生产效率和下落劳动强度 。
航空航天
航空航天领域的机器人能够完 成高精度、高风险的装配和维 修工作,提高工作效率和安全
机器人学基础 第1章 绪论 蔡自兴1PPT课件
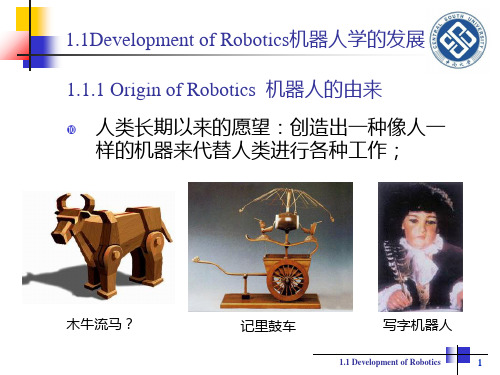
Isaac Asimov
1.1 Development of Robotics
5
1.1.1 History of Robotics
1962年,美国万 能自动化公司( Unimation)的 第一台机器人 Unimate在美国 通用汽车公司投 入使用,标志着 第一代机器人的 诞生。
1.1 Development of Robotics
Definition 4
机器人是“一种能够进行编程并在自动控制下执行 某些操作和移动作业任务的机械装置”。 —— (National Bureau of Standards, NBS)
1.1 Development of Robotics
12
1.1.2 Definition of Robotics
1.1 Development of Robotics
7
1.1.1 History of Robotics
1978年,美国 Unimation公司推 出通用工业机器 人PUMA,这标 志着工业机器人 技术已经完全成 熟。PUMA至今 仍然工作在工厂 第一线。
1.1 Development of Robotics
9
1.1.1 History of Robotics
2006年 6月,微软公司 推出Microsoft Robotics Studio,机器人模块化 、平台统一化的趋势越 来越明显,比尔·盖茨 预言,家用机器人很快 将席卷全球。
1.1 Development of Robotics
10
1.1.2 Definition of Robotics 机器人的定义
Robot(英文,“机器人”)
1.1 Development of Robotics
机器人技术及其应用课堂PPT
种类似自然语言的语句代替简单的if 和goto语 句
3.应用的自然性:由于这一特性的要求,使得 机器人语言逐渐增加各种功能,由低级向高级 发展。
4.易扩展性:从技术不断发展的观点来说,各 种机器人语言都能满足各自机器人的需要,又 能在扩展后满足未来新应用领域以及传感设备 改进的需要。
8
5.调试和外部支持工具 它能快速有效地对程序进行修改,已
商品化的较低级别的语言有非常丰富的调 试手段。 6.效率:语言的效率取决于编程的容易性。
9
第三节 动作级语言
10
一、AL语言 AL语言是一种高级程序设计系统,描
述诸如装配一类的任务。它有类似ALGOL 的源语言,有将程序转换为机器码的编译 程序和由控制操作机械手和其他设备的实 时系统。编译程序是由斯坦福大学人工智 能实验室用高级语言编写的,在小型计算 机上实时运行。近年来该程序已能够在微 型计算机上运行。
11
【例8-1】用AL语言 编制图8-1机器人把螺 栓插入其中一个孔里 的作业。这个作业需 要把机器人移至料斗 上方A点,抓取螺栓, 经过B点、C点再把它 移至导板孔上方D点 (见图8-1),并把螺 栓插入其中一个孔里。
12
编制这个程序采取的步骤是: (1)定义机座、导板、料斗、导板孔、
螺栓柄等的位置和姿态; (2)把装配作业划分为一系列动作,如
移动机器人、抓取物体和完成插入等; (3)加入传感器以发现异常情况和监视
装配作业的过程; (4)重复步骤1~3,调试改进程序。
13
二、LUNA语言及其特征 LUNA语言是日本SONY公司开发用
于控制SRX系列SCARA平面关节型机器人 的一种特有的语言。LUNA语言具有与 BASIC相似的语法,它是在BASIC语言基 础上开发出来的,且增加了能描述SRX系 列机器人特有的功能语句。该语言简单易 学,是一种着眼于末端操作器动作的动作 级语言。
3.应用的自然性:由于这一特性的要求,使得 机器人语言逐渐增加各种功能,由低级向高级 发展。
4.易扩展性:从技术不断发展的观点来说,各 种机器人语言都能满足各自机器人的需要,又 能在扩展后满足未来新应用领域以及传感设备 改进的需要。
8
5.调试和外部支持工具 它能快速有效地对程序进行修改,已
商品化的较低级别的语言有非常丰富的调 试手段。 6.效率:语言的效率取决于编程的容易性。
9
第三节 动作级语言
10
一、AL语言 AL语言是一种高级程序设计系统,描
述诸如装配一类的任务。它有类似ALGOL 的源语言,有将程序转换为机器码的编译 程序和由控制操作机械手和其他设备的实 时系统。编译程序是由斯坦福大学人工智 能实验室用高级语言编写的,在小型计算 机上实时运行。近年来该程序已能够在微 型计算机上运行。
11
【例8-1】用AL语言 编制图8-1机器人把螺 栓插入其中一个孔里 的作业。这个作业需 要把机器人移至料斗 上方A点,抓取螺栓, 经过B点、C点再把它 移至导板孔上方D点 (见图8-1),并把螺 栓插入其中一个孔里。
12
编制这个程序采取的步骤是: (1)定义机座、导板、料斗、导板孔、
螺栓柄等的位置和姿态; (2)把装配作业划分为一系列动作,如
移动机器人、抓取物体和完成插入等; (3)加入传感器以发现异常情况和监视
装配作业的过程; (4)重复步骤1~3,调试改进程序。
13
二、LUNA语言及其特征 LUNA语言是日本SONY公司开发用
于控制SRX系列SCARA平面关节型机器人 的一种特有的语言。LUNA语言具有与 BASIC相似的语法,它是在BASIC语言基 础上开发出来的,且增加了能描述SRX系 列机器人特有的功能语句。该语言简单易 学,是一种着眼于末端操作器动作的动作 级语言。
机器人课程ppt课件(2024)

当前面临挑战分析
01 02
技术瓶颈
机器人技术涉及多个领域,如机械、电子、计算机等,技术集成度高, 目前仍存在许多技术瓶颈,如机器视觉、语音识别等方面的准确性问题 。
法规政策
机器人产业的法规政策尚不完善,涉及安全、隐私等方面的法律法规缺 失,给产业发展带来一定的不确定性。
03
市场应用
机器人市场应用广泛,但不同领域的需求差异大,定制化程度高,如何
国外研究现状
日本、美国、欧洲等发达国家在机器人领域的研究处于领先 地位,拥有众多知名的机器人企业和研究机构。这些国家在 工业机器人、服务机器人、特种机器人等领域都有较为成熟 的应用和产业化经验。
发展历程及未来趋势
发展历程
机器人的发展历程经历了从第一代示教再现型机器人到第二代感觉型机器人,再到第三 代智能型机器人的演变。随着人工智能技术的不断发展,机器人的智能化水平不断提高
02
03
内部传感器
检测机器人自身状态,如 位置、速度、加速度等。
外部传感器
检测外部环境信息,如距 离、温度、声音、光线等 。
传感器融合技术
将多个传感器的信息进行 融合处理,提高检测精度 和鲁棒性。
控制技术
开环控制
根据预设的指令或程序, 对机器人进行精确控制。
闭环控制
通过反馈机制,实时调整 机器人的行为,以达到预 期目标。
校企合作
与企业合作,引入先进技术和资源,为学生提供更多实践机会和就业渠道
社区互动
利用社区资源,开展线上线下交流活动,拓宽学生视野和交际圈
优秀案例展示和评价标准探讨
案例一
学生自主研发智能小车,实现自动寻 迹、避障等功能
案例二
学生利用Python编程实现人脸识别系 统,应用于校园安全管理
2024年度-机器人教学课件(共26张PPT)pptx

介绍了机器人常用传感器类型、 工作原理及在机器人感知中的应 用。
机器人自主导航与定位
阐述了机器人自主导航的基本原 理、定位方法及SLAM技术。
机器人基本概念与分类
机器人操作系统与编程
介绍了机器人的定义、发展历程 、分类及应用领域。
介绍了ROS的基本概念、功能特 点、常用命令及编程实践。
32
学生自我评价报告分享
第三代机器人
智能型机器人,具备自主 学习和决策能力,能够适 应复杂环境和任务。
5
未来趋势展望
人机协作
随着人工智能技术的发展,未来 机器人将更加注重与人类的协作 ,共同完成任务。
应用领域拓展
随着技术进步和应用需求增加, 机器人将在更多领域得到应用, 如医疗、教育、娱乐等。
自主化
机器人将具备更高的自主性和智 能化水平,能够独立完成复杂任 务。
以促进课程的不断完善和提高。
33
下一步学习计划和资源推荐
深入学习机器人相关领域知识
鼓励学生继续深入学习机器人相关领域知识,如机器视觉、深度学习在机器人中的应用等 。
参加机器人竞赛和项目实践
推荐学生参加各类机器人竞赛和项目实践,锻炼自己的实践能力和团队协作能力。
利用在线资源进行自主学习
推荐学生利用MOOCs、在线实验室等资源进行自主学习和实践操作,提高自己的学习效 果和兴趣。
01
学习成果展示
通过课程学习,学生能够掌握机器人基本概念、运动学与控制、传感器
与感知、自主导航与定位等关键知识点,并具备一定的实践操作能力。
02
学习方法分享
学生可以采用多种学习方法,如课前预习、课后复习、小组讨论、实践
操作等,以提高学习效果和兴趣。
工业机器人技术基础课件(最全)ppt课件

右图就处于a)的奇异状态,直角下示教会报警。
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
直角坐标系
Never Stop Improving
— 6—
1 机器人工坐业标系机器人坐标系
机器人系统 关节坐标系
两者关系???
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
— 2—
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
1 机器人坐标系
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
在分析机器人时会牵涉诸多坐标系,一些是操作者不须关心的,另外一些却是和工艺相 关的。常见的坐标系有: 关节坐标系 基座坐标系 工具坐标系 用户坐标系
Never Stop Improving
px a
p
py
b
1pz
c w
— 12 —
2 机器人位姿变换
坐标轴方向的描述:
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
i、j、k分别是直角坐标系中x、y、Z坐标轴的单位向量。若用齐次坐标来描述x、y、z轴的方向, 则
基坐标系
Never Stop Improving
— 7—
1 机器人工坐业标系机器人坐标系
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
用户坐标系(工件坐标系):
用于描述各个物体或工位的方位的需要。用户常常在自
z
己关心的平面建立自己的坐标系,以方便示教。
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
直角坐标系
Never Stop Improving
— 6—
1 机器人工坐业标系机器人坐标系
机器人系统 关节坐标系
两者关系???
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
— 2—
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
1 机器人坐标系
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
在分析机器人时会牵涉诸多坐标系,一些是操作者不须关心的,另外一些却是和工艺相 关的。常见的坐标系有: 关节坐标系 基座坐标系 工具坐标系 用户坐标系
Never Stop Improving
px a
p
py
b
1pz
c w
— 12 —
2 机器人位姿变换
坐标轴方向的描述:
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
i、j、k分别是直角坐标系中x、y、Z坐标轴的单位向量。若用齐次坐标来描述x、y、z轴的方向, 则
基坐标系
Never Stop Improving
— 7—
1 机器人工坐业标系机器人坐标系
变频器 | PLC | HMI | 伺服驱动器 | 电机 | 大传动 | 新能源
用户坐标系(工件坐标系):
用于描述各个物体或工位的方位的需要。用户常常在自
z
己关心的平面建立自己的坐标系,以方便示教。
《工业机器人技术基础》教学ppt课件—第1章-工业机器人概述

作为这个世界上第一个工业机器人和第一家机器人企业的联合 开创者,恩格尔伯格也从此被称为为“机器人之父”。
约瑟夫·恩格尔伯格(美)
Joseph F·Engelberger
研制出了世界上第一台工业机器人 被誉为“机器人之父”
乔治·德沃尔(美)
George Devol
第一台可编程工业机器人的发明者 成立世界上第一家机器人公司Unimation
20世纪70年代,德国就开始了“机器换人”的过程。同时德 国政府通过长期资助和产学研结合,扶植了一批机器人产业和人 才梯队,如KUKA机器人公司。
德国工业机器人
总数位居世界第二位,仅次于日本
随着德国工业迈向以智能生产为代表 的“工业4.0”时代,德国企业对工业 机器人的需求将继续增加。
库卡
品类齐全 领域广泛
人们印象中的机器人
《罗萨姆的万能机器人》剧照
现实的东西
科幻文学作品 玩具商店中的玩具
20世纪50年代 约瑟夫·恩格尔伯格(美)& 乔治·德沃尔(美)设计发明出
世界上第一台工业机器人Unimate
● 意思为“万能自动” ● 是用于压铸的五轴液压驱动机器人 ● 手臂的控制由一台计算机完成 ● 能够记忆完成180个工作步骤
英国简明牛津字典
机器人是“貌似人的自 动机,具有智力的和顺 从于人的但不具人格的 机器”。这一定义并不 完全正确,因为还不存 在与人类相似的机器人 在运行。
美国国家标准 与技术研究院
一种能够进行编程并在 自动控制下执行某些操 作和移动作业任务的机 械装置”。这也是一种 比较广义的工业机器人 定义。
国际标准组织
图中有两台PUMA机器人
世界第一台 SCARA 工业机器人
Selective Compliance Assembly Robot Arm
工业机器人基础ppt课件
基坐标系 基坐标系是一个固定定义的直角坐标系,位于位于机器人基座。它是最 便 于机器人从一个位置移动到另一个位置的坐标系。
世界坐标系 世界坐标系是固定定义的直角坐标系,默认世界坐标系与基坐标系重合。 世界坐标系可定义机器人单元,所有其他的坐标系均与世界坐标系直接 或 间接相 关。它适用于微动控制、一般移动以及处理具有若干机器人或外 轴 移动机器人的工作站 和工作单元。
图4-17 工具坐标系及各轴的运动
主运动轴 腕运动轴
表4-4 工具坐标系下机器人的运动方式
轴
运动方式
六轴联动
沿 X 轴方向运动 沿 Y 轴方向运动
沿 Z 轴方向运动
末端点位置不变, 机器人分别绕 X 、Y、Z 轴转 动
5. 用户坐标系 用户坐标系是用户根据工作的需要,自行定义的坐标系,用户可根据需要 定义多个坐 标系,如图 4-19所示。用户自定义可以方便的量测工作区间中 各点的位置并加以任务安 排,且更符合人的直观。在用户坐标系下,机器 人末端轨迹沿用户自己定义的坐标轴方 向运动,其运动方式见表 4-5。
2、控制分辨率
是指位置反馈回路能 检测到的最小位移量。
当编程分辨率与控制分辨率相等时, 系统性能达到最高。
2.2.5 工业机器人的精度
机器人的精度主要体现在定位精 度和重复定位精度两个方面。
定位精度
指机器人末端操作器的实际位置 与目标位置之间的偏差,由机械误差、 控制算法误差与系统分辨率等部分组 成。
2.机器人自由度的选择
(1)一般自由度的选择
机器人的自由度是根据机器人的用途来设计的,人们希望机器人能以准确 的方位把它的末端执行部件或与它连接的工具移动到指定点。如果机器人的用 途是未知的,那么它应当具有6个自由度;机器人自由度数目越多,动作越灵 活,通用性越强,但是结构则更复杂,刚性也差;如果工具本身具有某种特别 结构,那么就可能不需要6个自由度。
世界坐标系 世界坐标系是固定定义的直角坐标系,默认世界坐标系与基坐标系重合。 世界坐标系可定义机器人单元,所有其他的坐标系均与世界坐标系直接 或 间接相 关。它适用于微动控制、一般移动以及处理具有若干机器人或外 轴 移动机器人的工作站 和工作单元。
图4-17 工具坐标系及各轴的运动
主运动轴 腕运动轴
表4-4 工具坐标系下机器人的运动方式
轴
运动方式
六轴联动
沿 X 轴方向运动 沿 Y 轴方向运动
沿 Z 轴方向运动
末端点位置不变, 机器人分别绕 X 、Y、Z 轴转 动
5. 用户坐标系 用户坐标系是用户根据工作的需要,自行定义的坐标系,用户可根据需要 定义多个坐 标系,如图 4-19所示。用户自定义可以方便的量测工作区间中 各点的位置并加以任务安 排,且更符合人的直观。在用户坐标系下,机器 人末端轨迹沿用户自己定义的坐标轴方 向运动,其运动方式见表 4-5。
2、控制分辨率
是指位置反馈回路能 检测到的最小位移量。
当编程分辨率与控制分辨率相等时, 系统性能达到最高。
2.2.5 工业机器人的精度
机器人的精度主要体现在定位精 度和重复定位精度两个方面。
定位精度
指机器人末端操作器的实际位置 与目标位置之间的偏差,由机械误差、 控制算法误差与系统分辨率等部分组 成。
2.机器人自由度的选择
(1)一般自由度的选择
机器人的自由度是根据机器人的用途来设计的,人们希望机器人能以准确 的方位把它的末端执行部件或与它连接的工具移动到指定点。如果机器人的用 途是未知的,那么它应当具有6个自由度;机器人自由度数目越多,动作越灵 活,通用性越强,但是结构则更复杂,刚性也差;如果工具本身具有某种特别 结构,那么就可能不需要6个自由度。
机器人ppt(共21张PPT)

送给操作人员。 (2) 凿岩机器人。这种机器人可以利用传感器 来确定巷道的上缘,这样就可以自动瞄准巷 道缝,然后把钻头按规定的间隔布置好,钻 孔过程用微机控制,随时根据岩石硬度调整 钻头的转速、力的大小以及钻孔的形状,这 样可以大大提高生产率,人只要在平安的地 方监视整个作业过程就行了。
(3) 井下喷浆机器人。井下喷浆作业是一项繁 重且危害人体健康的作业,目前这种作业主 要由人操作机械装置来完成,缺陷很多。采 用喷浆机器人不仅可以提高喷涂质量,也可 以将人从恶劣和繁重的作业环境中解放出来。 (4) 瓦斯、地压检测机器人。瓦斯和冲击地压 是井下作业中的两个不平安的自然因素,一 旦发生突然事故,那么相当危险,
先兆,采取相应的预防措施。 柔性特征:对作业具有广泛适应性
机器人学是人们设计和应用机器人的技术和知识。 柔性特征:对作业具有广泛适应性 机器人学是一门交叉学科,它得益于机械工程、电气与电子工程、计算机科学、生物学以及其他许多学科。
此外,在食品工业、核工业等行业中也已 其结构简单,无独立控制系统,造价低廉,如附设在加工中心机床上的自动换刀机械手。
动作平稳可靠,运行速度快,称重精度高,缝口位置准确,码垛垛形整齐。 (2) 凿岩机器人。 动作平稳可靠,运行速度快,称重精度高,缝口位置准确,码垛垛形整齐。
围 大 , 定 位 精 度 高 , 通 用 性 强 , 适 用 于 不 断 哈工大博实公司自主开发的“自动包装机器人码垛生产线〞应用于大庆石化公司10万吨/年聚丙烯生产装置,全线实现了自动运行,
南京金城机械在其125-7D车架的生产线上 使用了7台机器人用于焊接和切割,提高了 产品的一致性。
2) 在电子、家电行业中的应用 机器人的应用改变了韵声集团八音琴全靠手工
装配的历史,提高了企业形象,积累了经验, 培养了人才,为企业的下一步开展打下了根 底。 3) 在石化行业中的应用 哈工大博实公司自主开发的“自动包装机器人 码垛生产线〞应用于大庆石化公司10万吨/ 年聚丙烯生产装置,全线实现了自动运行,
工业机器人技术基础ppt-课件
再现操作盒 控制柜
示教编程器
16
(3) 焊接系统
焊接系统是焊接机器 人完成作业的核心装备,主 要由焊枪、焊接控制器及水 、电、气等辅助部分组成。 焊接控制器是由微处理器及 部分外围接口芯片组成的控 制系统,它可根据预定的焊 接监控程序,完成焊接参数 输入、焊接程序控制及焊接 系统故障自诊断,并实现与 本地计算机及手控盒的通讯 联系。
12
1.3 弧焊机器人系统的构成
1.机器人操作机 日本安川(YASKAWA)公司:MOTOMAN-UP20型 2.机器人控制器 YASNAC XRC UP20型 3.焊接电源 MOTOWELD-S350型弧焊电源 4.辅助系统 送丝机构、焊丝、焊接保护气体等
13
14
(1)机器人操作机
机器人操作机是焊接机器人 系统的执行机构,它由驱动器、传动 机构、机器人臂、关节以及内部传感 器(编码器)等组成。它的任务是精 确的保证末端操作器所要求的位置、 姿态和实现其运动。由于具有六个旋 转关节的铰接开链式机器人操作机从 运动学上已被证明能以最小的结构尺 寸为代价获取最大的工作空间,并且 能以较高的位置精度和最优路径到达 指定位置,因此这种类型的机器人操 作机在焊接领域得到广泛的应用。
成具有大批量、高质量要求的工作,如自动化
生产线中的点焊、弧焊
、喷漆、切割、
电子装配及物流系统的搬运 、包装、码垛
等作业的机器人。此外,机器人也可用于软质
材料的切削加工,如陶泥,泡沫,石蜡 ,有机
玻璃等。
3
1、Motoman机器人简介
• 焊接制造工艺由于其工艺的复杂性、劳动强度 、产品质量、批量等要求,使得焊接工艺对自 动化对于其工艺的自动化、机械化的要求极为 迫切,实现机器人焊接代替人工操作成为焊接 工作者追求的目标。
机器人基础知识培训ppt课件

26
三、组成
1、执行机构 2、机械本体 3、控制系统 4、检测系统
27
组成部分关系图
28
1、执行机构
29
2、机械本体
30
3、控制系统
31
4、检测系统
32
四、特点
1、通用性 2、柔软性 3、准确性 4、自动性
33
五、工业机器人的分类
1)按自动化功能层次分为专用机器人、通用机器人、示教再 现机器人、智能机器人;
第三条:在不违反第一条和第二条的情况下, 机器人必须保护自己。
11
机器人的分类
A、工业机器人 B、娱乐机器人 C、家庭机器人 D、竞赛机器人 E、军用机器人
12
工业机器人
我国工业机器人这几年发展很快,随着人口红利的逐渐 下降,企业用工成本不断上涨,工业机器人正逐步走进 公众的视野。
将工业机械手臂安装在工厂生产线,可提高产品的质量 与产量,而且对保障人身安全,改善劳动环境,减轻劳 动强度,提高劳动生产率,节约原材料消耗以及降低生 产成本,有着十分重要的意义。随着近几年一直严峻的 招工难问题,以及工厂老板一直头痛的劳资纠纷,安装 工业机器人无疑是一个很好的解决方法。
国际物流技术发展的新趋势之一,而移动机器人是其中的核心 技术和设备,是用现代物流技术配合、支撑、改造、提升传统 生产线,实现点对点自动存取的高架箱储、作业和搬运相结合, 实现精细化、柔性化、信息化,缩短物流流程,降低物料损耗, 减少占地面积,降低建设投资等的高新技术和装备。
46
47
点焊机器人
25
二、发展方向
要想跟上未来工业发展,工业机器人技术是先进制造技 术的代表。首要任务是提高工业机器人的智能化技术。 智能化技术可以提高机器人的工作能力和使用性能。智 能化技术的发展将推动着机器人技术的进步,未来智能 化水平将标志着机器人的水平,虽然目前还有很多问题 需要解决,但随着科学技术的进步,会逐渐改进发展。 未来的智能化方向不会改变,并且会将机器人产品拓展 到更多行业,形成完备的系统。现今我国人工利息不时 上升的大环境下,工业机器人必将迅速发展,逐渐成为 工厂自动化生产线的主要发展形式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中科鸥鹏
ห้องสมุดไป่ตู้
伺服电机调零
零点标定信号的时序图
' CenterServoP12.bs2 ' This program sends 1.5 ms pulses to the servo connected to ' P12 for manual centering. ' {$STAMP BS2} ' {$PBASIC 2.5} DEBUG "Program Running!" DO PULSOUT 12, 750 PAUSE 20 LOOP
注意:每个伺服电机的控制电缆有三根线,其中白色的线用来传送电机的控 制信号,红色用来接到电源上,而黑色的则是地线。这些线的颜色的定义在 伺服电机出厂时就已经定义好。以后你将会在工程上看到,许多电气元件都 是通过线的颜色来标记电线所承担的功能。
中科鸥鹏
连接完成后,搭建好的系统如下图
教学底板与电池盒、伺服电机接线示意图
这个例程演示了如何对变量进行声明、初始化和运算。 ' VariablesAndSimpleMath.bs2 ' Declare variables and use them to solve a few arithmetic problems. ' {$STAMP BS2} ' {$PBASIC 2.5} value VAR Word ' Declare variables anotherValue VAR Word value = 500 ' Initialize variables anotherValue = 2000 DEBUG ? value ' Display values DEBUG ? anotherValue value = 10 * anotherValue ' Perform operations DEBUG ? value ' Display values again DEBUG ? anotherValue END
中科鸥鹏
用变量存储数值,数学运算和计数
变量可以用来储存数值。
PBASIC语言在使用一个变量之前,要先给该变量起一个名字,并说 明该变量的大小类型。这叫声明一个变量。声明一个变量的PBASIC 语法如下:
variableName VAR Size
中科鸥鹏
PBASIC程序中可以声明的变量类型如下:
如果电机还没有进行零点标定,用螺丝刀轻轻调节伺服电 机上的电位器,直到电机停止转动。(仔细倾听电机的声 音,确信电机已经停止转动)
中科鸥鹏
程序示例: CenterServoP13.bs2
' CenterServoP13.bs2 ' This program sends 1.5 ms pulses to the servo connected to ' P13 for manual centering. ' {$STAMP BS2} ' {$PBASIC 2.5} DEBUG "Program Running!" DO PULSOUT 13, 750 PAUSE 20 LOOP
中科鸥鹏
任务1:将伺服电机连接到教学板
在本任务中首先将伺服电机连接到电源和BASIC Stamp模 块的I/O口,然后搭建一个LED电路来监视BASIC Stamp 模块发送到伺服电机的运动控制信号。
连接伺服电机所需的零部件 帕拉斯公司生产的连续旋转伺服电机2个; 搭建LED电路所需的零配件(LED和470欧姆电阻)2套
中科鸥鹏
连接伺服电机到教学底板
把三位开关拨至0位切断教学底板的电源。 显示的是教学板上伺服电机接线端子。
中科鸥鹏
如果使用6V电池组,将两个伺服电机接线端子之间的跳线 帽接Vin
如果使用7.5 V、1000 mA的直流电源,将跳线帽接Vdd
中科鸥鹏
下图是你将要搭建的电路的示意图,跳线设定接Vin。
中科鸥鹏
右边的真实接线图将LED监视电路在教学板上连接好;然 后转到任务2。
伺服电机控制信号的LED监视电路
中科鸥鹏
任务2:伺服电机调零
所谓伺服电机调零是指,当发送一个特定的控制信号(零 点标定信号)给伺服电机时,让电机保持静止的过程。
由于伺服电机在工厂没有预先调整,它们在接收到该零点 标定信号时可能会转动。因此你要用螺丝刀调节伺服电机 模块内的调节电阻让伺服电机保持静止。这就是伺服电机 调零过程。
中科鸥鹏
连续旋转伺服电机简介
机器人的伺服电机是用来将机器人大脑发出的运动指令 转换为运动动作的部件,相当于人的肌肉的作用。
本讲教你如何连接、调整以及测试机器人伺服电机。为 此,你需要理解和掌握控制伺服电机方向、速度和运行时间 的相关PBASIC指令及其编程技术。
中科鸥鹏
连续旋转伺服电机简介
机器人伺服电机有很多种,本讲要介绍的主要是连续旋转 伺服电机。
Bit — 存储0或者1;
Bib
— 用来存储0到15之间的任意数值;
Byte — 用来存储0到255之间的任意数值;
Word — 用来存储0到65535之间的任意数值,或者-32768到32767之 间的任意数值。
注意:为何有上述特定的变量类型大小呢?请参考二进制 的说明。
中科鸥鹏
程序示例: VariablesAndSimpleMath.bs2
第二讲 机器人的伺服电机
BASIC Stamp 2
教学底板
本课件基于秦志强、陈伟和王文斌合作编译的高职教材
《基础机器人制作与编程》制作而成
主讲人:秦志强博士
中科鸥鹏
本讲摘要
连续旋转伺服电机简介 任务1:将伺服电机连接到教学板 任务2:伺服电机调零 任务3:如何保存数值和计数 任务4:测试伺服电机 本章小结:工程素质和技能归纳
Excerpts from page 54
中科鸥鹏
注意:以上程序一旦执行,将永远执行下去,直到你关断 微控制器的电源为止
最好每次只对一只电机做标定,因为这样的话,在你调节 电机时你就可以听到什么时候电机停止。 (为何用听到, 而不用看到?)
中科鸥鹏
如果电机没有进行零点标定,它的连接喉就会转动,而且 你也能听到里面马达转动的响声。
注意:如果上述任务完成后,不再进行后面的任务,一定要记得 将教学板的电源断开。
中科鸥鹏
任务3:如何保存数值和计数
你在编写某个程序时,肯定并不总是需要机器人永远执行 同一个操作或者说任务,而只希望它执行一段指定的时间 或者执行一些固定的次数。这时,你就要在PBASIC 程序 中用于到变量。
变量用来保存数值。 1.后面的机器人程序很大程度上都要依赖使用变量。 2.用变量保存数值的最主要的作用就是程序能用这些变量 来计数。 3.一旦你的程序能计数,你就能控制和跟踪事件发生的次 数。
ห้องสมุดไป่ตู้
伺服电机调零
零点标定信号的时序图
' CenterServoP12.bs2 ' This program sends 1.5 ms pulses to the servo connected to ' P12 for manual centering. ' {$STAMP BS2} ' {$PBASIC 2.5} DEBUG "Program Running!" DO PULSOUT 12, 750 PAUSE 20 LOOP
注意:每个伺服电机的控制电缆有三根线,其中白色的线用来传送电机的控 制信号,红色用来接到电源上,而黑色的则是地线。这些线的颜色的定义在 伺服电机出厂时就已经定义好。以后你将会在工程上看到,许多电气元件都 是通过线的颜色来标记电线所承担的功能。
中科鸥鹏
连接完成后,搭建好的系统如下图
教学底板与电池盒、伺服电机接线示意图
这个例程演示了如何对变量进行声明、初始化和运算。 ' VariablesAndSimpleMath.bs2 ' Declare variables and use them to solve a few arithmetic problems. ' {$STAMP BS2} ' {$PBASIC 2.5} value VAR Word ' Declare variables anotherValue VAR Word value = 500 ' Initialize variables anotherValue = 2000 DEBUG ? value ' Display values DEBUG ? anotherValue value = 10 * anotherValue ' Perform operations DEBUG ? value ' Display values again DEBUG ? anotherValue END
中科鸥鹏
用变量存储数值,数学运算和计数
变量可以用来储存数值。
PBASIC语言在使用一个变量之前,要先给该变量起一个名字,并说 明该变量的大小类型。这叫声明一个变量。声明一个变量的PBASIC 语法如下:
variableName VAR Size
中科鸥鹏
PBASIC程序中可以声明的变量类型如下:
如果电机还没有进行零点标定,用螺丝刀轻轻调节伺服电 机上的电位器,直到电机停止转动。(仔细倾听电机的声 音,确信电机已经停止转动)
中科鸥鹏
程序示例: CenterServoP13.bs2
' CenterServoP13.bs2 ' This program sends 1.5 ms pulses to the servo connected to ' P13 for manual centering. ' {$STAMP BS2} ' {$PBASIC 2.5} DEBUG "Program Running!" DO PULSOUT 13, 750 PAUSE 20 LOOP
中科鸥鹏
任务1:将伺服电机连接到教学板
在本任务中首先将伺服电机连接到电源和BASIC Stamp模 块的I/O口,然后搭建一个LED电路来监视BASIC Stamp 模块发送到伺服电机的运动控制信号。
连接伺服电机所需的零部件 帕拉斯公司生产的连续旋转伺服电机2个; 搭建LED电路所需的零配件(LED和470欧姆电阻)2套
中科鸥鹏
连接伺服电机到教学底板
把三位开关拨至0位切断教学底板的电源。 显示的是教学板上伺服电机接线端子。
中科鸥鹏
如果使用6V电池组,将两个伺服电机接线端子之间的跳线 帽接Vin
如果使用7.5 V、1000 mA的直流电源,将跳线帽接Vdd
中科鸥鹏
下图是你将要搭建的电路的示意图,跳线设定接Vin。
中科鸥鹏
右边的真实接线图将LED监视电路在教学板上连接好;然 后转到任务2。
伺服电机控制信号的LED监视电路
中科鸥鹏
任务2:伺服电机调零
所谓伺服电机调零是指,当发送一个特定的控制信号(零 点标定信号)给伺服电机时,让电机保持静止的过程。
由于伺服电机在工厂没有预先调整,它们在接收到该零点 标定信号时可能会转动。因此你要用螺丝刀调节伺服电机 模块内的调节电阻让伺服电机保持静止。这就是伺服电机 调零过程。
中科鸥鹏
连续旋转伺服电机简介
机器人的伺服电机是用来将机器人大脑发出的运动指令 转换为运动动作的部件,相当于人的肌肉的作用。
本讲教你如何连接、调整以及测试机器人伺服电机。为 此,你需要理解和掌握控制伺服电机方向、速度和运行时间 的相关PBASIC指令及其编程技术。
中科鸥鹏
连续旋转伺服电机简介
机器人伺服电机有很多种,本讲要介绍的主要是连续旋转 伺服电机。
Bit — 存储0或者1;
Bib
— 用来存储0到15之间的任意数值;
Byte — 用来存储0到255之间的任意数值;
Word — 用来存储0到65535之间的任意数值,或者-32768到32767之 间的任意数值。
注意:为何有上述特定的变量类型大小呢?请参考二进制 的说明。
中科鸥鹏
程序示例: VariablesAndSimpleMath.bs2
第二讲 机器人的伺服电机
BASIC Stamp 2
教学底板
本课件基于秦志强、陈伟和王文斌合作编译的高职教材
《基础机器人制作与编程》制作而成
主讲人:秦志强博士
中科鸥鹏
本讲摘要
连续旋转伺服电机简介 任务1:将伺服电机连接到教学板 任务2:伺服电机调零 任务3:如何保存数值和计数 任务4:测试伺服电机 本章小结:工程素质和技能归纳
Excerpts from page 54
中科鸥鹏
注意:以上程序一旦执行,将永远执行下去,直到你关断 微控制器的电源为止
最好每次只对一只电机做标定,因为这样的话,在你调节 电机时你就可以听到什么时候电机停止。 (为何用听到, 而不用看到?)
中科鸥鹏
如果电机没有进行零点标定,它的连接喉就会转动,而且 你也能听到里面马达转动的响声。
注意:如果上述任务完成后,不再进行后面的任务,一定要记得 将教学板的电源断开。
中科鸥鹏
任务3:如何保存数值和计数
你在编写某个程序时,肯定并不总是需要机器人永远执行 同一个操作或者说任务,而只希望它执行一段指定的时间 或者执行一些固定的次数。这时,你就要在PBASIC 程序 中用于到变量。
变量用来保存数值。 1.后面的机器人程序很大程度上都要依赖使用变量。 2.用变量保存数值的最主要的作用就是程序能用这些变量 来计数。 3.一旦你的程序能计数,你就能控制和跟踪事件发生的次 数。