DGPS设置方法(通用方案)
DGUS屏使用指南
目录一.硬件连接 (1)1.屏命名规则 (1)2.C系列屏 (1)2.1. 实物图如下图1(具体型号请参考对应数据手册)所示: (1)2.2. 串口引脚接法说明: (2)2.3.用户接口方式 (2)3.T系列屏 (2)3.1 .实物图如下图2(具体型号请参考对应数据手册)所示: (2)3.2 .10pin串口引脚接法说明: (3)3.3. 8pin串口引脚接法说明: (3)3.4. 用户接口方式 (3)4.S系列屏 (4)4.1. 实物图如下图3(具体型号请参考对应数据手册)所示: (4)4.2. 10pin串口引脚接法说明: (4)4.3. 8pin串口引脚接法说明: (4)4.4. 用户接口方式 (5)5.18系列屏 (5)5.1. 实物图如下图4(具体型号请参考对应数据手册)所示: (5)5.2. 6pin串口引脚接法说明: (6)5.3. 用户连接端子 (6)二.软件设计 (6)1.开发原理 (6)2.开发前准备资料 (7)2.1 软件 (7)2.1.1 配置软件 (7)2.1.2 0号字库软件 (9)2.1.3 汉字字库生成软件 (10)2.1.4 迪文ICO生成图标库软件 (11)2.1.5 迪文图片分辨率转换软件 (14)2.2 硬件 (16)2.2.1 连接线 (16)2.2.2 下载工具 (17)3.软件开发步骤 (18)3.1. 软件界面介绍 (18)3.2. 通讯说明 (18)3.2.1 数据帧架构 (18)3.2.2 指令集及说明 (19)3.2.3 0x80、0x81指令说明 (19)3.2.4 0x82、0x83指令说明 (20)3.3. 例程说明 (20)3.3.1. 屏按键功能(与上位机交互) (21)3.3.2. 屏显示/不显示变量功能(启动描述指针功能) (21)3.3.3. 数据存储功能(掉电保存) (23)3.3.4. 上电初始化 (24)3.3.5. 不带触摸的屏实现触摸屏功能 (25)4.SD卡升级内核程序 (27)4.1. SD卡升级内核应满足以下任一条件: (27)4.2. SD卡升级注意事项 (27)三.注意事项 (27)一.硬件连接1.屏命名规则图12.2. 串口引脚接法说明:图23.2 .10pin串口引脚接法说明:4.S系列屏4.1. 实物图如下图3(具体型号请参考对应数据手册)所示:图3后的短接焊盘来改变电平为3.3V的COMS电平;供电可以通过焊接屏后的短接焊盘来改变供电范围,具体参数请参考对应型号数据手册;4.3. 8pin串口引脚接法说明:4.4. 用户接口方式10 Pin_1.0mm FCC , 8 Pin_2.54mm5.18系列屏5.1. 实物图如下图4(具体型号请参考对应数据手册)所示:图45.2. 6pin 串口引脚接法说明:引脚名称 说明 GND 接地485_- 接485接口的B 端 485_+ 接485接口的A 端232_Tx 屏发送端,接控制端的接收端 232_Rx 屏接收端,接控制端的发送端VIN 典型12V 供电,宽压供电,具体型号屏请以对应数据手册为准SD 卡座SD 卡下载接口,凤凰端子边上5.3. 用户连接端子6Pin_3.81mm 凤凰端子;二.软件设计1.开发原理开发原理概述:使用迪文DGUS 配置软件将变量和需要实现的功能关联起来,然后通过控制端给该设置的变量赋值来实现对应的功能,或读取变量值来查看屏当前相关功能的状态; 变量地址:是针对屏来进行定义的,类似组态软件的地址定义,又不相同,主要区别在于组态软件的地址是有特定含义的(即和屏内部的某个功能已绑定),而采用DGUS 屏的变量地址可以与任意功能来进行关联(不出现变量地址交叉的情况即可),变量地址范围为0x0000——0x6FFF ;变量地址 屏显示、触控功能 单片机 绑定 对变量读写 配置软件设置设置配置时定义变量地址2.开发前准备资料2.1 软件2.1.1 配置软件配置软件的主要目的是配置屏的触控、通讯参数设置及显示参数设定;配置软件如下图5所示:图5软件使用操作步骤:1.新建一个工程文件,如下图6所示选择屏的分辨率及存储位置;分辨率举例说明:屏型号:DM T80480T070_06WTT:16位色;80480 :800 x 480的分辨率;注:由于所有K600+的屏都是16位色,软件已屏蔽位色选择功能,若屏需要竖起来显示(及该为480 x 800的方式),可以修改软件目录下Config文件夹上的Terminal文件来修改分辨率,修改为480 x 800 ,如下截图7所示(设置R10=480X800):图6图72.注:若图片不是按照存储位置方式命名,添加进来图片后,软件左边“位置”一列,对应的是设置触控及显示的位置,如将上图位置修改为1,再做设置,那么0界面(即首页)的触控及显示设置都将到次页(即1界面)上。
差分GPS(DGPS)测量规范
差分GPS(DGPS)数据测量规范●DGPS的组成:1.DGPS由差分数据播发台、DGPS接收台和导航卫星构成。
2.差分数据播发台最少要求设1座基准台和1座无线电发射台,宜再设1座监测台。
较完善的系统设2个以上的基准台和发射台,并有控制中心交叉覆盖的DGPS网。
3.DGPS接收台由1台GPS接收机,1台差分数据接收机及各自的天线组成。
●基准台GPS接收机技术要求:接收频率:L1 1575.42MHz接收通道数:不少于6通道,使用能连续跟踪10颗以上卫星的多通道连续接收机跟踪方式:C/A码相位跟踪和载波相位辅助跟踪接收灵敏度:—135dBm工作方式:差分工作方式卫星识别:0~37定位算法:视界卫星卫星掩角:7度30分电离层改正:不改正天线高度:固定高度位置:固定位置识别号:三位数数据延时:播发伪距修正值的延迟时间可调日历状态电文:根据变化输出星历数据电文:根据变化输出●DGPS主要技术要求:1.DGPS在覆盖范围内的定位误差应小于10米2.系统向用户提供差分信息的更新间隔1~5秒3.DGPS宜采用全球大地坐标系WGS-84,并发布WGS-84玉1954北京坐标系之间的转换值4.DGPS应采用北京时间5.DGPS应公布该系统的服务范围,各区域的定位精度6.DGPS建成后,应公布差分全球定位系统台站表●航海无线电信标DGPS发射特性1.工作频率:DGPS使用航海无线电信标用283.5~325.0kHz的频率发射。
无线电信标用主(F1,在整数频点上)播发指向信号,用副载波(F1+500Hz)播发DGPS修正值和辅助信息。
2.频率容差:载波的频率精度保持在±6ppm之间(如:315kHz的频率误差为±2Hz)3.相位噪声:频率偏移10Hz时,每一频段的单边带相位噪声应低于-80dB/Hz4.杂散输出:杂散输出应低于-60dB5.同步类型:电文以同步方式播发6.伪距修正值(PRC)延迟时间:播发修正值的平均延迟时间应小于0.25s7.调制方式:采用最小频率键控(MSK)调制,是一种连续的相位、频移键控(CPFSK)调制。
中海达GPS操作流程
中海达GPS操作流程一、仪器架设与连接(GNSS接收机,型号:A10)注意基准站与移动台的模式。
连续按两下F1键为更改主机模式,然后按一下进行模式更改,更改完成按电源键完成。
注意必须在主机锁定卫星的前提下进行软件操作。
基准站架设点必须满足以下要求:1、高度角在15度以上开阔,无大型遮挡物;2、无电磁波干扰(200米内没有微波站、雷达站、手机信号站等,50米内无高压线);3、在用电台作业时,位置比较高,基准站到移动站之间最好无大型遮挡物,否则差分传播距离迅速缩短;4、至少两个已知坐标点(已知点可以是任意坐标系下的坐标,最好为三个或三个以上,可以检校已知点的正确性);5、不管基站架设在未知点上还是已知点上,坐标系统也不管是国家坐标还是地方施工坐标,此方法都适用。
二、手簿软件操作(型号:iHand20)1、建立项目打开HI-Survey 软件→点击项目→点击项目信息→输入项目名→确定。
2、项目设置点击项目设置→点击地球图标设置坐标系统→点击BJ54地方设置投影(目标椭球与已知点坐标系统一致、投影→投影方法(高斯三度带、当地中央子午线)→点击保存→点击确定,项目新建完毕。
3、设置基准站点击设备→点击基准站→点击连接→选择点击基准站对应的仪器S/N号→点击天线类型→点击平滑(10次)→点击确定→点击设置。
(基站设置成功,是否断开当前连接,转去连接移动站?点击是)4、设置移动站点击设备→点击移动站→点击连接→选择点击移动站对应的仪器S/N号→点设置。
达到固定解移动站设置完毕。
5、解算参数点击测量→点击碎步测量→把移动站架到控制点上→设置天线高→对中整平→测点→点击项目→点击参数计算→点击添加→在源坐标里把控制点从点库里调出来→把对应已知坐标输进去→点击保存→点击计算→点击应用。
5.1点击测量→点击碎步测量→把移动站架到控制点上→设置天线高→对中整平→测点5.2点击项目→点击参数计算→点击添加→在源坐标里把控制点从点库里调出来→把对应已知坐标输进去→点击保存。
Pix4Dmapper教程

Pix4Dmapper教程Pix4Dmapper简易作业手册12作业流程图3原始资料准备原始资料包括影像数据、POS数据、相机文件以及控制点数据。
确认原始数据的完整性,检查获取的影像中有没有质量不合格的相片。
同时查看POS数据文件,主要检查航带变化处的相片号,防止POS数据中的相片号与影像数据相片号不对应,出现不对应情况应手动调整。
POS数据格式如下图,从左往右依次是相片号、经度、维度、高度、航向倾角、旁向倾角、相片旋角获取原始资料建立测区导入数据全自动处理结果分析导入的数据包括图像、POS、控制点、相机参数自动完成空三,生成DSM、DOM通常我们可以使用软件数据库中的相机文件,如果软件数据库中没有外业航拍使用的相机,就需要设置相机参数。
控制点文件,有时候为了方便内业刺控制点,控制点名字包含了点所在的一张相片号。
4建立工程并导入数据3.1.建立工程打开pix4dmapper,选项目-新建项目,在弹出来的对话框中设置工程的属性,如下图所示,选上航拍项目,不勾植被和倾斜项目,然后输入工程名字,设置路径(工程名字以及工程路径不能包含中文)。
新建项目选上,然后选择下一步Next。
通过合并现有项目来创建新项目在处理多个工程时会用到。
3.2.加入影像点添加图像,选择加入的影像。
影像路径可以不在工程文件夹中,路径中不要包含中文。
点Next。
(软件英文版还有设置图像标签lable功能)3.3.设置影像属性✓图像坐标系设置POS数据坐标系,默认是WGS84(经纬度)坐标。
✓地理定位和方向设置POS数据文件,点从文件选择POS文件。
✓相机型号设置相机文件。
如果相机模型库没有拍摄的相机,选择Edit手动设置相机参数。
确认各项设置后,点Next进入下一步。
然后点击Finish完成工程的建立。
5快速处理检查(可选)快速处理出来的结果精度比较低,所以快速处理的速度会快很多。
因此快速处理建议在飞行现场进行,发现问题方便及时处理。
中海达GPS设置步骤

中海达GPS设置步骤1.架设基站,量出仪器高度。
需注意的事项:架设完基站与电瓶连接的时候要注意红接“+”,黑接“—”,先接黑线后接红线(即先黑后红)切勿接错。
2.打开手薄,选择Hi-RTK道路版,然后双击。
出现主菜单后,点击GPS。
点击接收机信息,连接GPS,会出现GPS连接设置页面:(手薄:Q series/GIS+ 连接:Q系列/GIS+蓝牙端口:3 波特率:19200 GPS 类型:V8)。
然后点击连接,选中接收机型号(接收机型号位于接收机下部)连接。
连接完成后,点击接收机信息,选择基准站设置。
单击打开后,输入点名,天线高(即仪器高度)。
输入完成后,点击平滑,平滑时接收机会提示卫星锁定,平滑结果的时间为10s,平滑的误差应保证≤0.03。
平滑完成后,点击数据链,数据链为外部数据链,点击运用。
然后点击其他,(差分模式:RTK 电文格式:CMR 高度截止角:5—15),最后点击确定,即基站设置完成。
设置完成后电台与接收机将正常发射信号。
3.设置完基站后,点击接收机信息,断开GPS。
然后连接移动站,连接移动站的步骤和连接基站的步骤基本上一样。
即,点击接收机信息,连接GPS,会出现GPS连接设置页面,(手薄:Q series/GIS+ 连接:Q系列/GIS+蓝牙端口:3 波特率:19200 GPS 类型:V8)。
然后点击连接,选中移动接收机型号。
连接完成后,点击测量,看手薄是否显示为固定解。
若固定,则下步为踩点。
4.踩点步骤:在Hi-RTK道路版主菜单点击测量,在碎部测量中点击Σ∕n,平滑出控制点的坐标,然后打√,会弹出记录点信息,输入已知控制点的点名,天线高为2.071m,然后打√。
踩点的时候应注意,踩的点应≥3个以上,在架设基站位置的大里程踩两个点,小里程也同样踩两个点,点与点的间距可以适当选择,500m—1000m。
或者大里程踩两公里小里程踩两公里,适情况而定。
踩完点之后,退回到主菜单,点击参数,在坐标系统中,输入文件名,将平面转换和高程拟合调成无,点击保存。
DGPS RTK技术及其在工程测量中的应用

DGPS RTK技术及其在工程测量中的应用柳响林全球定位系统(GPS)在测绘生产部门的应用前几年主要集中在控制测量上。
作为测绘行业的一次技术革命,GPS不仅显著地提高了控制测量生产的效率(包括缩短作业周期、减低作业强度、降低作业消耗),而且还从根本上改变了控制测量的作业模式和流程,使控制测量全流程自动化。
GPS定位技术近几年的进展主要集中在实时动态测量上。
这项技术关键在于OTF(On-The-Fly)在航解求整周模糊度,目前这项技术已经成熟。
高精度的实时动态差分DGPS RTK(Real-Time Kinematic)已经广泛应用于电力、公路、铁路的勘测设计和施工放样,地质石油勘探及大江大河的水文地质调查。
最近两年的动态GPS仪器的价格有所下降,OTF锁定整周模糊度的时间不断减少,已经受到测绘生产部门的关注或成为GPS用户的首选目标。
1实时动态差分GPS系统的最低配置和基本特点实时动态差分GPS系统最低配置包括三个部分:①基准站。
基准站由GPS双(单)频接收机、GPS天线、数据发送电台、天线、电源、脚架等部分组成。
②流动站。
流动站由GPS双(单)频接收机、GPS天线、数据接收电台、天线、电源、背包、HUSKY手控器、对中杆等组成。
③支持实时动态差分的软件系统及各项工程测量应用功能。
基准站接收机设在具有已知坐标的参考点位上,连续接收所有可视GPS卫星信号,并将测站坐标、观测值、卫星跟踪状态及接收机工作状态通过数据链发送出去,流动站接收机在跟踪GPS卫星信号的同时接收来自基准站的数据,通过OTF 算法解求载波相位整周模糊度,在通过相对定位模型获取所在点相对基准站的坐标和精度指标。
OTF算法是RTK的关键技术,OTF算法很多,不同的厂家生产的动态GPS接收机使用不同的OTF算法。
一般首先在未知点的近似坐标和协方差的基础上确定整周模糊度的搜索空间,在搜索空间内计算所有可能的模糊度解,然后通过比较最小方差选择最可能的解,最后通过比较最优解和次优解决定最后的模糊度解。
差分GPS定位(DGPS)原理

差分GPS定位(DGPS)原理DGPS是克服SA的不利影响,提高GPS定位精度的有效手段,可达到厘米级及以上精度。
DGPS一般可分为区域DGPS、广域DGPS和全球DGPS,区域性基于基站的DGPS已经实现,全球DGPS正在酝酿中。
DGPS是英文Difference Global Positioning System的缩写,即差分全球定位系统,方法是在一个精确的已知位置上安装监测接收机,计算得到它能跟踪的每颗GPS卫星的距离误差。
该差值通常称为PRC(伪距离修正值),将此数据传送给用户接收机作误差修正,从而提高了定位精度。
随着GPS技术的发展和完善,应用领域的进一步开拓,人们越来越重视利用差分GPS技术来改善定位性能。
它使用一台GPS基准接收机和一台用户接收机,利用实时或事后处理技术,就可以使用户测量时消去公共的误差源电离层和对流层效应,并能将卫星钟误差和星历误差消除,因此,现在发展差分GPS技术就显得越来越重要。
GPS定位是利用一组卫星的伪距、星历、卫星发射时间等观测量来实现的,同时还必须知道用户钟差。
因此,要获得地面点的三维坐标,必须对4颗卫星进行测量。
在这一定位过程中,存在着三部分误差。
一部分是对每一个用户接收机所公有的,例如,卫星钟误差、星历误差、电离层误差、对流层误差等;第二部分为不能由用户测量或由校正模型来计算的传播延迟误差;第三部分为各用户接收机所固有的误差,例如内部噪声、通道延迟、多径效应等。
利用差分GPS定位技术(DGPS),除第三部分误差无法消除外,第一部分误差完全可以消除,第二部分误差大部分可以消除,其主要取决于基准接收机和用户接收机的距离。
差分GPS定位已将卫星钟误差和星历误差消除,并将电离层延迟和对流层延迟误差部分消除,定位精度大大提高。
所以,差分GPS定位技术(DGPS)在最近几年中得到了迅速发展和广泛应用。
根据差分GPS基准站发送的信息方式可将差分GPS定位技术(DGPS)分为三类,即:位置差分、伪距差分和相位差分。
PROJET3510HDPLUS操作规范

PROJET3510HDPLUS操作规范3D打印机操作规范一、环境要求:保持环境温度为23℃左右、空气湿度为≤50%。
二、核心设备:3D打印机一台(型号:PROJET 3510 HD PLUS)、电脑一台、温度计、UPS一台。
三、操作步骤:1、首先将电脑和打印机用网线连接起来,并根据打印机的IP地址:206.65.90.250,将电脑的网络连接IP地址设定为:206.65.90.251,其余采用默认设置。
2、将格式为*.stl或*.ctl的文件导入电脑。
具体操作如下:(1)按截图1操作截图1截图2 (3)进入截图3状态截图3截图4 (5)进入截图5状态截图5截图5(7)进入截图7状态截图7(9)进入截图9状态截图9(10)检查打印机是否一切就绪(如打印铝板的放置、打印材料余量是否合适等)。
若一切就绪,及时填写生产记录单,并按截图10的操作开始打印。
四、注意事项:1、每次打印前都要及时关注打印材料的余量是否能满足本次打印需求,若材料不足应及时添加,并按要求认真填写生产记录单;2、每次开始打印任务前确认打印机是否处于待机状态,热机完成至可打印工作状态方可输入文档开始打印。
切记。
3、现打印机的待机时间是20小时,务必在此时段取出打印件进行后期处理,以免因温差导致模型变形问题。
切记。
4、正确安装打印板,每次均需确认无误。
5、打印过程中,UV灯不能长时间直视,以免影响视力;6、若打印机出现异常,及时与厂方联系。
调试前,迎现将P3口拔掉,即切断UV灯电源;7、打印头出现漏液异常时,若需测真空值,需用专用的测试仪表和测试软管(厂方将配送),按厂方指导要求进行测试。
真空值得理想范围为:1.55-1.65之间;8、收缩补偿值的应用:当发现工件尺寸与设计尺寸不相符时,需对打印机的X、Y、Z三方向的值进行补偿。
具体操作方法按照厂方提供《收缩补偿指导手册》(电子版)进行操作。
MAX DGPS应用简介

Config Wizard和System Setup菜单介绍 Wizard和 Setup菜单介绍
Config Wizard中你可以应用以前保存的 Wizard中你可以应用以前保存的 设置,也可以跟着向导一步步的进行新 的设置。 System Setup子菜单如右图所示,中的 Setup子菜单如右图所示, Display Apps显示目前应用的两种模式 Apps显示目前应用的两种模式 (WAAS﹑Omnistar)。 (WAAS﹑Omnistar)。 Display Format中包括更新频率和基本 Format中包括更新频率和基本 的单位设定,Baud Rates中有4800 的单位设定,Baud Rates中有4800 、 9600 、19200几种波特率的选择,要保持 19200几种波特率的选择, 软件中端口的波特率设置与GPS中波特率 软件中端口的波特率设置与GPS中波特率 设置一致,通常应用9600的设置。 设置一致,通常应用9600的设置。
DGPS-MAX设备参数: 参数: 参数
•GPS 接受频率: •通道: •平面精度: •串口协议: •输出协议:
1.575 GHz
12 parallel tracking <1.2m RS232 NMEA 0183
DGPS MAX操作简介 MAX操作简介
• • • • • •
安装、操作界面简介 GPS菜单介绍 GPS菜单介绍 Beacon菜单介绍 Beacon菜单介绍 Config Wizard和System Setup菜单介绍 Wizard和 Setup菜单介绍 External RTCM 应用介绍 接口介绍
谢 谢!
•
•
NMEA Output的输出格式如右 Output的输出格式如右 图所示:实际应用时只需打开 GPGGA格式的数据就可以,其 GPGGA格式的数据就可以,其 余的都关掉(OFF)。 余的都关掉(OFF)。 Elev mask设置为5o。 mask设置为5 UTC Offset +8为北京时间。 +8为北京时间。
DGPS在浮标定位中的应用

通信与导航DGPS在浮标定位中的应用卢志勇1 范少勇2(1广东海事局 广州 510230,2广东海洋大学航海学院 湛江 524088)摘 要:DGPS的产生给浮标定位带来了革命性的变化,文章论述了DGPS在浮标定位中的应用及具体的操作方法,以供探讨和参考。
关键词:DGPS 浮标定位 操作方法1 前言随着我国航运事业和国民经济的发展,我国沿海新开发的港口、航道大量增加,船舶通航密度加大。
为保障船舶航行安全,有关部门在沿海港口、航道上设置了大量的助航标志,其中一部分为水上灯浮标。
据不完全统计,截至2007年,我国沿海海事直属机构、地方机构、专业单位管理的各类航标共7891座。
海事直属机构管理的各类航标5096座,其中灯浮标2576座,这些浮标的实际敷设位置要求与公布的设计位置一致,尤其是狭窄航道及人工开挖航槽的侧面标、孤立障碍标,如上海港的北槽航道、广州港的伶仃航道和莲花山航道等,浮标敷设位置精度要求更高。
目前我国沿海浮标敷设及维护主要通过航标船进行,大、中型航标船上设有浮标作业专用的起重机及绞盘机,可以方便地进行浮标投放、回收、复位、复光、检查、保养等工作。
作业过程中必不可少的一项工序是浮标定位。
以前,浮标定位是用原始的 三标两角 法求出船舶与浮标设计位置的方位、距离,再操纵船舶接近浮标设计位置。
因受风流的影响,船舶很容易偏离浮标设计位置,往往需要多次的反复定位、反复操作才能将船舶驶到该位置,非常繁琐。
且测定目标方位到在图上定出位置、再到浮标最终投放完成,存在时间差,很难做到 实时定位 ,造成浮标位置误差较大,不能满足精度要求,影响船舶航行安全。
全球定位系统(GPS)的产生,给船舶定位带来了革命性的变化,由此衍生的差分全球定位系统收稿日期:2009-02-22作者简介:卢志勇(1966-),男,广东人,工程师,船长,主要从事航海技术工作。
(D ifferentia lG lobal Positi o n i n g Syste m,简称DGPS),更是使浮标精确定位得以真正的实现。
船用二次雷达标校中DGPS技术的应用

船用二次雷达标校中DGPS技术的应用摘要本文根据某二次雷达工程应用的实际,提出一种以DGPS全球卫星定位技术为基础的雷达标校方法,并对该方法进行了理论分析,该方法也可供其它雷达参考使用。
关键词DGPS;二次雷达;标校0 引言雷达的测距误差与系统的延时、系统带宽和本地噪声等因数有关;测角误差与天线和转台的安装,信号处理方法和接收机噪声等因数有关。
测距和测角的误差可以分解为系统误差和随机误差。
从误差的性质来讲,随机误差部分需在雷达的设计、制造等环节采取措施尽量减小,而系统误差则能在雷达设计、制造、安装等方面予以消除。
这种通过校准和标定减小系统误差的方法就称之为标校。
某新型二次雷达现在已经大批量交付用户安装在船舶平台上使用,为使其方位和测距精度满足使用要求,必须进行距离和方位标校。
特别是由于该二次雷达采用了单脉冲技术,当标校现场环境复杂时,天线方向图易受环境影响而发生变化,所以该雷达在安装完成后、天线安装环境发生变化后、雷达维修后等情况下都必须进行标校,以满足用户使用要求。
1 传统雷达标校方法和不足通常的二次雷达标校方法是船舶停泊在码头,二次雷达对指定的目标进行测距和测向后标校。
码头的准确经纬度是已知的,在与二次雷达通视的远方(通常为十几公里)已有一个永久性的标校塔,将二次雷达标校应答机应答天线装在塔顶,且这个塔的经纬度也是已知的。
这样,舰船停泊的码头中心点对标校塔的距离和方位角就固定了。
每当需要标校时,二次雷达开机搜索标校塔方向的标校应答机,采得的距离和方位数据的平均值与固有值比较,就得到二次雷达测量结果的修正值。
另一种标校法与前者大同小异,是采用高精度的光学仪器测定出二次雷达天线座中心点至目标点的方位和距离,然后二次雷达找到标校目标,修正二次雷达的误差。
上述标校方法的优点是精度高,成本低,重复性好,缺点是对标校环境天气要求较高,在舰船较多的时候很难满足条件。
而且大部分码头并不具备标校塔设施,难于实现。
NovAtelOEM4GPS接收机的基本设置-伪距差分

NovAtel OEM4 GPS接收机的基本设置-RTD伪距差分设置常用命令说明1.Log version查看或输出接收机序列号和软件版本号2.Log comconfig查看或输出接收机串口设置3.Saveconfig保存接收机设置 com1 9600 n 8 1 n off 设置接收机串口5.posave 0.01 取0.01小时的数据作平均值固定测站6.Interfacemode com2 none rtca 设置串口输入或输出形式7.Log bestpos ontime ?输出GPS天线的纬度、经度和高程等信息8.Log GPGGA ontime ?输出GPS通用NMEA语句信息9.Fix position输入基准站已知点的坐标,输入的坐标形式为:纬度(单位为度)经度(单位为度,WGS84坐标系)高度(平均海拔高)10.Fix none取消输入的坐标,使接收机的定位状态由Fix恢复到Single.11.Freset 清空接收机内存中所保存的所有设置和信息备注:ontime ?用以控制输出数据的输出频率,?为数字,即为每?秒输出一次,根据接收机功能的不同,?的最小值的限制也不同,一般?的最小值为0.1,即接收机的最高输出频率为10Hz;输入命令时,对输入字母的大小写没有要求,可任意输入。
DGPS测量时基准站设置(接收机的COM2口发送差分信息,接电台)1.使用GPSolution4.exe软件或Windows超级终端连接GPS接收机的COM1串口;2.在命令栏中输入命令:posave 0.3 (取0.3小时内的平均位置作为基准站已知值)或使用Fix position命令输入基准站已知点的坐标;3.Interfacemode com2 none rtca(设置COM2口发送RTCA格式的差分改正信息); com2 38400(n 8 1 n off)(设置COM2口的串口波特率,要保证改值与电台的Serial Interface的串口波特率一致,其中括号中的内容可以不用输入,为默认设置);5.Log com2 rtca1 ontime 2(设置基准站的COM2输出差分改正信息,频率为每2秒发送一次);6.设置基准站输出信息,如Log com1 GPGGA ontime 1;7.Saveconfig (保存基准站设置);备注:若基准站需要换站,则先输入命令Fix none,取消以前输入的坐标,然后使用命令Fix position再输入新的站点的坐标重新固定基准站,最后保存设置DGPS测量时移动站设置(接收机的COM2口接收差分信息,接电台)1.使用GPSolution4.exe软件或Windows超级终端连接GPS接收机的COM1串口;2.Interfacemode com2 rtca none(设置COM2口接收RTCA格式的差分改正信息); com2 38400(n 8 1 n off)(设置COM2口的串口波特率,要保证改值与电台的Serial Interface的串口波特率一致,其中括号中的内容可以不用输入,为默认设置);4.设置输出信息,如Log com1 GPGGA ontime 1;5.Saveconfig (保存移动站设置);备注:若使用SSII接收机作为移动站,其设置更改如下:DGPS测量时基准站设置(接收机的COM2口发送差分信息,接电台)1.使用GPSolution4.exe软件或Windows超级终端连接GPS接收机;2.在命令栏中输入命令:posave 0.3 (取0.3小时内的平均位置作为基准站已知值)或使用Fix position命令输入基准站已知点的坐标;3.Interfacemode com2 none rtcm(设置COM2口发送RTCM格式的差分改正信息); com2 9600(n 8 1 n off)(设置COM2口的串口波特率,要保证改值与电台的Serial Interface的串口波特率一致,其中括号中的内容可以不用输入,为默认设置);5.Log com2 rtcm1 ontime 2(设置基准站的COM2输出差分改正信息,频率为每2秒发送一次);6.设置基准站输出信息,如Log com1 GPGGA ontime 1;7.Saveconfig (保存基准站设置);备注:若基准站需要换站,则先输入命令Fix none,取消以前输入的坐标,然后使用命令Fix position再输入新的站点的坐标重新固定基准站,最后保存设置DGPS测量时移动站设置(接收机的COM2口接收差分信息,接电台) 运行Starview软件连接时,在菜单工具栏中选择File/Port——Serial Port或Auto Connect如,均可以连接接收机,如图1:图1在设置接收机前,需要将接收机的工作模式切换成Binary模式,在菜单工具栏中选择Tool Setting—Protocol(如图2),在弹出的对话框中(如图3),点击“Force to Binary,9600 BPS”,或者在Desired setting选项中选择Binary,9600 BPS,即可将接收机的工作模式切换至Binary Mode:图2图3开始设置接收机:首先进行接收机的DGPS选项设置:点击StarView软件工具栏中的“Tool setting”,在下拉菜单中选择“Set DGPS Config”选项,屏幕上出现窗口,在窗口中的“DGPS”选项中选择“ON”,在“DGPS Type”选项中选择“Beacon only”,将“Diff. Coast”和“Corr. Coast”设置为120秒,设置COM2串口波特率为9600bps,如下图4:图4其次观察状态:点击StarView软件工具栏中的“Windows”,在下拉菜单中选择“navigation”选项,并继续选择“LLH-solution”,在出现的窗口中查看“Nav Mode”和“DGPS Source”选项,若分别对应显示为“Diff. 3-D”和“Beacon”,具体状态如下图5,表明差分GPS接收机已经开始差分定位,可以正常进行工作;图5。
DGPS系统配置方案

DGPS系统配置方案1、地面基准站搭建基准站接收机OEMV-1G-1Hz;20米GPS天线馈线;A20(带吸盘)/39(不带吸盘)天线(根据现场实际情况);12V电源及相应电源接线(与接收机电源接口相对应);DB9公头-DB9母头直连串口线/USB-RS232转接线;DB9公头-DB9公头交叉串口线。
将GPS接收机固定在机柜内,从12V电源通过电源接线接入GPS接收机;通过DB9公头-DB9母头直连串口线将服务器与OEMV-1G-1Hz接收机COM1相连;将GPS天线(A20/39)在服务器所在信号楼的楼顶固定,视现场情况考虑是否需要加防雷;将GPS天线馈线一端安装在GPS天线(A20/39),另一端引入服务器所在机房(机械室)并与OEMV-1G-1Hz接收机BNC接口相连,尽量避免在接收机上电时插拔馈线;将DB9公头-DB9公头交叉串口线一端与OEMV-1G-1Hz接收机COM2相连,另一端与DB9母头-DB25公头线相连接,DB25公头与地面电台DB25母头相连。
在服务器上安装NovAtel CDU软件,按默认选项安装即可;打开NovAtel CDU应用程序,点击打开,配置接收机COM1参数,注意选择服务器串口号,选择默认配置即可;观察卫星情况;随后进行命令设置:⑴COM COM2 19200设置COM2口波特率19200,通过电台直接与移动站通信进行测点时所设的波特率;⑵INTERFACEMODE COM2 NOV ATEL RTCM OFF设置COM2口发送RTCM差分数据,接受NOV ATEL定位数据;⑶POSA VE 24平均当前位置24小时后固定当前位置,也可根据实际情况选择其他时间长度,但一般不小于12小时,直到状态由Single变为Fixed,记录此时的经、纬、高度信息;⑷FIX POSITION 纬度值经度值高度值固定基准站坐标;⑸LOG COM2 RTCM1B ONTIME 5 ;设置COM2口RTCM1B差分数据5秒发送一次(使用USB-RS232接收数据,确认起始为0xAA,数据长度不超过128个字节);⑹SA VECONFIG保存当前设置;2、移动站搭建……。
GP-36 DGPS导航器操作指南说明书
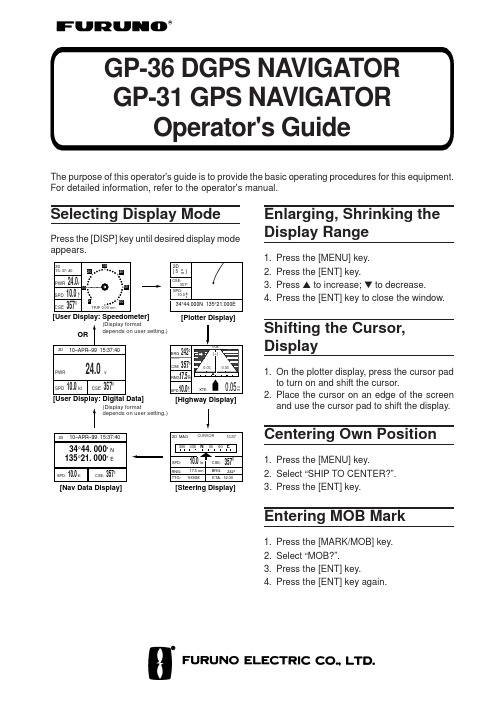
GP-36 DGPS NAVIGATORGP-31 GPS NAVIGATOROperator's GuideThe purpose of this operator's guide is to provide the basic operating procedures for this equipment. For detailed information, refer to the operator's manual.Selecting Display ModePress the [DISP] key until desired display modeappears.[Nav Data Display][Highway Display][Plotter Display][Steering Display](Display formatdepends on user setting.)[User Display: Speedometer]Enlarging, Shrinking theDisplay Range1.Press the [MENU] key.2.Press the [ENT] key.3.Press v to increase; w to decrease.4.Press the [ENT] key to close the window.Shifting the Cursor,Display1.On the plotter display, press the cursor padto turn on and shift the cursor.2.Place the cursor on an edge of the screenand use the cursor pad to shift the display.Centering Own Position1.Press the [MENU] key.2.Select “SHIP TO CENTER?”.3.Press the [ENT] key.Entering MOB Mark1.Press the [MARK/MOB] key.2.Select “MOB?”.3.Press the [ENT] key.4.Press the [ENT] key again.Registering WaypointsA waypoint can be entered four ways. Below is the procedure for entry by the cursor.1.Operate the cursor pad to place the cursor on the location where you want to inscribe a waypoint.2.Press the [ENT] key.CURSOR POS. →WYPT3.Press the [ENT] key.4.Place the cursor under “MARK”.5.Press the [ENT] key.6.Press v or w to select mark shape desired.7.Press the [ENT] key.8.Select “Exit?” and then press the [ENT] key.Registering Routes1.Press the [MENU] key once or twice to dis-play the menu.2.Select “ROUTES”.3.Press the [ENT] key.4.Press the [ENT] key.5.Press the [ENT] key, select route waypoint and press the [ENT] key.6.Repeat step 5 to enter other waypoints on the route.7.Select “Exit?” to register route and finish.8.Press the [ENT] key to register.Setting, Cancelling DestinationDestination can be set three ways. Below is the method for setting destination by the cursor.To set destination by cursor;1.Press the [GOTO] key.2.Select “CURSOR?”.3.Press the [ENT] key.4.Place the cursor on position to set as desti-nation.5.Press the [ENT] key.To cancel destination;1.Press the [GOTO] key.2.Select “OFF?”.3.Press the [ENT] key.Setting the Arrival Alarm1.Press the [MENU] key once or twice to dis-play the menu.2.Select “ALARMS”.3.Press the [ENT] key.4.Select “ARV/ANC” and press the [ENT] key.5.Select “ARV” and press the [ENT] key.6.Press the [ENT] key and enter arrival alarm range with the cursor pad.7.Press the [ENT] key.8.Press the [MENU] key twice to finish.P U B .N O .O S E -43990-A(9905,D A M I )G P -31/36。
DGPS技术在铁路行业的应用

技术应用DGPS技术在铁路行业的应用罗年有,李聪旭,王英杰,孙慧(北京经纬信息技术有限公司,北京100081)摘要:运行环境以及采集数据时的行业特点决定了铁路行业对位置信息高精准度的需求,分析终端接收卫星定位数据的技术原理,GPS数据达不到要求,采取差分技术手段,提出差分全球定位系统(DGPS),通过对GPS数据的差分来提高定位精准度。
总结DGPS数据采集技术特点,并与当前传统勘测手段进行比较,考虑数据隐私、人员安全等因素,通过理论方案设计和试验验证,选取最符合铁路行业运行条件的实现方案,保证铁路部门采集数据的隐私性、时效性和准确性。
关键词:铁路行业;DGPS定位;高精度数据;勘测中图分类号:U212.2文献标识码:A文章编号:1001-683X(2020)10-0115-05 DOI:10.19549/j.issn.1001-683x.2020.10.1150引言随着GPS、北斗卫星导航系统[1]地建立和完善,接收卫星定位数据在铁路行业各专业领域得到了广泛应用,如房屋勘测[2]、轨道采集、应急救援等,这些工作大多采用GPS接收卫星反馈的数据。
铁路行业对采集数据的精准度要求很高[3],普通手机接收到的GPS数据达不到应用要求,需要进一步研究如何获得更精准的数据。
1GPS定位及误差GPS通过观察、测量1组卫星的伪距、星历、卫星发射时间、钟差等实现定位。
想要获得地面点的三维空间数据,必须对至少4颗卫星进行观测,在定位过程中,会产生3部分误差,第一部分是公有的卫星误差,如星历、电离层、对流层、卫星钟误差等;第二部分是传递误差,由卫星发射到用户接受所延迟的时间导致;第三部分则是内部误差,如接收机内部噪声、通道、多路径效应误差等[4]。
2DGPS技术GPS提供了2种服务,一种是精确定位服务(PPS),一种是标准定位服务(SPS)[5],精确定位服务不公开提供,地图定位都是标准定位服务,标准定位服务因人为因素造成误差,降低了精度,想要获取高精度坐标的用户需要使用差分技术,提高标准定位服务精度,第一作者:罗年有(1994—),男,工程师。
GPS误差分析及DGPS

GPS误差分析及DGPS1.GPS 定位的误差来源分析GPS 测量是通过地面接收设备接收卫星传送来的信息,计算同一时刻地面接收设备到多颗卫星之间的伪距离,采用空间距离后方交会方法,来确定地面点的三维坐标。
因此,对于GPS卫星、卫星信号传播过程和地面接收设备都会对GPS 测量产生误差。
主要误差来源可分为:与GPS卫星有关的误差;与信号传播有关的误差;与接收设备有关的误差。
在GPS卫星定位测量中,影响观测量精度的主要误差来源一般可分为三类:与GPS卫星有关的误差:卫星轨道误差、卫星时钟误差。
1.1 与卫星有关的误差1.1.1 卫星星历误差卫星星历误差是指卫星星历给出的卫星空间位置与卫星实际位置间的偏差,由于卫星空间位置是由地面监控系统根据卫星测轨结果计算求得的,所以又称为卫星轨道误差。
它是一种起始数据误差,其大小取决于卫星跟踪站的数量及空间分布、观测值的数量及精度、轨道计算时所用的轨道模型及定轨软件的完善程度等。
星历误差是GPS 测量的重要误差来源。
1.1.2 卫星钟差卫星钟差是指GPS卫星时钟与GPS标准时间的差别。
为了保证时钟的精度,GPS卫星均采用高精度的原子钟,但它们与GPS标准时之间的偏差和漂移和漂移总量仍在1ms~0.1ms以内,由此引起的等效误差将达到300km~30km。
这是一个系统误差必须加于修正。
1.1.3 SA干扰误差SA误差是美国军方为了限制非特许用户利用GPS进行高精度点定位而采用的降低系统精度的政策,简称SA政策,它包括降低广播星历精度的ε技术和在卫星基本频率上附加一随机抖动的δ技术。
实施SA技术后,SA误差已经成为影响GPS定位误差的最主要因素。
虽然美国在2000年5月1日取消了SA,但是战时或必要时,美国可能恢复或采用类似的干扰技术。
SA技术主要内容是:(1)在广播星历中有意地加入误差,使定位中的已知点(卫星)的位置精度大为降低;(2)有意地在卫星钟的钟频信号中加入误差,使钟的频率产生快慢变化,导致测距精度大卫降低。
3s技术在农业中的应用及发展

3s技术在农业中的应用及发展3S技术在农业中的应用论文班级:姓名:学号:指导老师:摘要:农业是在信息技术发展的基础上,以地理信息系统(GIS)、全球定位系统(GPS)、遥感技术(RS)和计算机自动控制技术为核心技术引发的一场新农业技术革命,将对我国农业技术的发展产生重大影响。
因此,应在充分了解国际精准农业发展的理论基础和技术原则的基础上,结合我国具体情况,研究发展适合我国国情的精准农业技术体系。
3S系统将信息获取、信息处理、信息应用集结于一身,突出表现在信息获取与处理的高速、实时与应用的高精度、可定量化方面。
3S系统是三者相互补充相得益彰构成的一个功能完整强大的空间数据采集处理分析系统, 3S集成技术已成为农业、生物信息管理的先进技术手段。
关键字:3S技术, 精准农业, 遥感, 信息处理正文:一、3S技术的概念:3S 是全球定位系统( GPS)、地理信息系统( G IS)和遥感( RS)的统称。
是空间技术、传感器技术、卫星定位与导航技术和计算机技术、通讯技术相结合, 多学科高度集成的对空间信息进行采集、处理、水分反应非常敏感, 所以利用热红外波段遥感监测对象和作业监测土壤和植被水分十分有效。
研究表明, 不同热惯量条件下, 遥感波谱间的差异性表现最明显, 所以通过建立热惯量与土壤水分间的数学模型, 就能够监测土壤水分含量和分布状况。
1.2.3土壤养分分布调查。
在播种之前, 可用一种适用于在农田中运行的采样车辆按一定的要求在农田中采集土壤样品。
车辆上配置有 GPS接收机和计算机, 计算机中配置地理信息系统软件。
采集样品时, GPS接收机把样品采集点的位置精确地测定出来, 将其输入计算机, 计算机依据地理信息系统将采样点标定, 绘出一幅土壤样品点位分布图。
1.2.4农作物病虫害监测。
应用遥感手段能够探测病虫害对作物生长的影响, 跟踪其发生演变状况, 分析估算灾情损失, 同时还能监测虫源的分布和活动习性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DGPS设置及使用说明
一、基准站(星网宇达1060接收机)
XW-ETS1060天线接口通过天线电缆连接GPS天线(蘑菇头)。
另有两根多芯电缆,一根为带T型插头的电源线,可接入直流12V或3S聚合物锂电池供电。
另一根为数据电缆,分出三个RS-232插头,其线上的标记如下:【差分/RS232】为GPS接收机的COM1,发送差分数据,接数传电台;
【调试/RS232】为GPS接收机的COM2,用来连接电脑进行调试、测试等;
【协议/RS232】不使用。
常用命令:
freset复位命令(恢复出厂设置,可根据情况选用)
(注:复位后COM1、COM2波特率为9600bps,如发送此命令无回应,则输入大写的@S2B3,可将基站的COM2波特率改为9600。
)
com com1 115200将串口1设为115200
com com2 115200将串口2设为115200
log comconfig查看各串口的设置
saveconfig保存设置
设置命令:
interfacemode com1 none rtca 设置com1发送rtca差分信息
log com1 rtca ontime 0.2 设置com1输出频率为5Hz
log bestposa ontime 1 输出GPS的纬度、经度及高度等数据
posave 0.05 取0.05小时的数据作平均值固定测站
(或使用fix position 纬经高数据)手动输入基准站坐标
saveconfig 保存设置
注:如基准站需要改变位置,应先输入fix none,取消之前的坐标,然后用fix position再输入新的坐标,重新固定基准站,最后saveconfig保存设置。
二、移动站(诺瓦泰OEM615)
设置命令:
interfacemode com1 rtca none 设置com1接收rtca差分信息
log com2 GPGGA ontime 0.1 设置com2输出10Hz定位信息
(可根据需要调整为二进制输出)
saveconfig 保存设置
NovAtel GPS接收机常用命令说明
1.Log version 查看或输出接收机序列号和软件版本号
2.Log comconfig 查看或输出接收机串口设置
3.Log loglist 查看接收机输出的数据信息设置
4.Log rxstatus 查看接收机状态信息
5.Log GPGGA ontime ?输出GPS通用NMEA语句信息GGA
6.Log bestposa ontime ?输出GPS天线的纬度、经度和高程等信息
7.Saveconfig 保存接收机设置
8.Com com1 9600 n 8 1 n off 设置接收机串口
9.posave 0.01 取0.01小时的数据作平均值固定测站
10.Interfacemode com2 none rtca 设置串口输入或输出形式
11.Fix none 取消输入的坐标,使接收机的定位状态由Fix恢复到Single
12.Freset 清空接收机内存中所保存的所有设置和信息,使接收机恢复出厂设置
备注:
ontime ?用以控制输出数据的输出频率,?为数字,即为每?秒输出一次,根据接收机功能的不同,?的最小值的限制也不同,一般?的最小值为0.1,即接收机的最高输出频率为10Hz;
输入命令时,对输入字母的大小写没有要求,可任意输入。
星网宇达OEM615环境板说明
1.615的COM1(11、12、13脚)是环境板上的DB9;
2.615的COM2是14发、15收、16地;
3.615的COM3是4收、9发。
615的COM3口默认是关闭的,需通过COM1口或者COM2口发6条命令来打开,命令如下:
1. interfacemode usb1 none none
2. interfacemode usb2 none none
3. interfacemode usb3 none none
4. markcontrol mark1 disable
5. interfacemode com3 novatel novatel
6. saveconfig。