动态规划matlab仿真实例整理
动态规划选址,背包matlab
%选址问题cleara=[150 170 210 260 310;150 165 220 170 320;150 180 230 265 310;150 190 215 240 300]%第一年到第五年的选址费用b=[0 5 10 9;5 0 7 6;10 7 0 8;9 6 8 0]%从地址i转到地址j的转移费用f=zeros(4,6);%存储指标函数的值v=zeros(4,1);%存储决策变量的值ff=zeros(5,1);%存储指标函数的值c=zeros(5,1);%存储最终所选地址for s=5:-1:1%用逆推法求解for k=1:4v=a(:,s)+b(:,k);f(k,s)=min(v+f(:,s+1));endff(s,1)=min(f(:,s));c(s,1)=min(find(f(:,s)==ff(s,1)));%找到一列中最小元素所在的行,如果有两行相等则取较小行endff,c% 背包问题A=10; %背包的重量极限n=3; %物品的种数a=[3 4 5]; %第i件物品的单件重量c=[4 5 6]; %第i件物品的单件价值%%%%%%%%%%%%%%%%%%%s=0:1:A;x{1}=floor(s./a(1));f{1}=c(1).*x{1};for i=1:A+1xvalue{1}{i}=x{1}(i); %xvalue为最优路径endfor i=2:nfor j=0:10tmax=floor(s(j+1)/a(i))+1;ff{j+1}=ones(1,tmax);for t=1:tmaxff{j+1}(t)=(t-1)*c(i)+f{i-1}(s(j+1)-(t-1)*a(i)+1); %临时取值:(t-1)*c(i)+f(i)xval{j+1}{t}=[xvalue{i-1}{s(j+1)-(t-1)*a(i)+1},t-1]; %每种ff取值的x 的路径endfff=ones(1,tmax);fff=ff{j+1};[f{i}(j+1),k]=max(fff);xvalue{i}{j+1}=xval{j+1}(k); %通过k值确定最优路径endend[fmax,h]=max(f{n}); %最优解finalx=xvalue{n}{h}; %最优路径finalxfmax。
利用MATLAB求解离散动态规划问题
14 / 28
利用MATLAB求解离散动态规划问题
三、动态规划求解函数-算例1求解过程分析
1. 阶段变量k: 将问题按工程分为4个阶段,即k = 1, 2, 3, 4 2. 状态变量sk : 状 态 变 量sk 表 示 第k个 工 程 至 第4个 工 程 可 用 的 投 资 总 额 , 显 然 有s1 = 60
穷举所有可能的结果,找出其中最优值及对应的策略
3 / 28
利用MATLAB求解离散动态规划问题
二、穷举法:算例1-算法与程序
对 于上 述 问 题 , 在 穷 举 求 解 时 应 注 意 投 资 额 不 多 于60万 元 的 约 束。稍加分析便知道60万元必须全部用完没有剩余,否则结果一 定不会是最优解。因此可以写出以下程序: 输入利润函数: V 1 = [0, 20, 50, 65, 80, 85, 85]; V 2 = [0, 20, 40, 50, 55, 60, 65]; V 3 = [0, 25, 60, 85, 100, 110, 115]; V 4 = [0, 25, 40, 50, 60, 65, 70];
10 / 28
利用MATLAB求解离散动态规划问题
二、穷举法:算例2-算法与程序(续)
n = size(R, 1); Path = zeros(50, 5); Path(1 : 50, 1) = 1; Path(1 : 50, 5) = n; D = inf ∗ ones(50, 1); m = 1; for i = 1 : n; if R(1, i) ∼= inf for j = 1 : n if R(i, j) ∼= inf for k = 1 : n if R(j, k) ∼= inf Path(m, 2 : 4) = [i, j, k]; D(m) = 0; D(m) = D(m)+ R(1, i)+ R(i, j)+ R(j, k)+ R(k, n); m = m + 1; end ...
基于Matlab的动态规划算法的实现及应用
基于Matlab的动态规划算法的实现及应用动态规划(Dynamic Programming)是一种用来求解多阶段最优化问题的方法,在许多领域中都得到了广泛的应用。
本文将介绍如何使用Matlab实现动态规划算法,并通过一个具体的应用案例来说明其使用方法和效果。
动态规划算法的基本思想是将一个问题分解成多个阶段,每个阶段的最优解可以通过前一阶段的最优解来计算得到。
具体实现时,需要定义一个状态转移方程来描述问题的阶段之间的关系,以及一个递推公式来计算每个阶段的最优解。
在Matlab中,可以使用矩阵来表示问题的状态和状态转移方程,使用循环结构来进行递推计算。
下面以求解最长递增子序列(Longest Increasing Subsequence)为例来说明动态规划算法在Matlab中的实现和应用。
最长递增子序列是一个经典的动态规划问题,给定一个序列,找出一个最长的子序列,使得子序列中的元素是递增的。
可以使用动态规划算法来求解该问题。
定义一个状态数组dp,其中dp(i)表示以第i个元素结尾的最长递增子序列的长度。
初始化dp数组为1,表示每个元素自身就是一个递增子序列。
然后,使用一个循环结构遍历序列的每个元素,计算以当前元素结尾的最长递增子序列的长度。
具体实现时,需要比较当前元素与之前的元素的关系,如果当前元素大于之前的元素,则可以将当前元素加入到之前的最长递增子序列中,并更新dp(i)为dp(j)+1,其中j为小于i的所有元素的位置。
遍历dp数组,找出其中的最大值,即为整个序列的最长递增子序列的长度。
下面是Matlab代码的实现:```matlabfunction LIS = LongestIncreasingSubsequence(nums)N = length(nums);dp = ones(1, N);for i = 1:Nfor j = 1:i-1if nums(i) > nums(j)dp(i) = max(dp(i), dp(j)+1);endendendLIS = max(dp);end```以上代码定义了一个函数LongestIncreasingSubsequence,输入参数为一个序列nums,输出结果为最长递增子序列的长度LIS。
基于Matlab的动态规划算法的实现及应用

基于Matlab的动态规划算法的实现及应用动态规划是一种解决多阶段决策过程的优化技术。
它的主要思想是将问题分成几个阶段,在每个阶段用一个状态来描述问题,然后找到在每个阶段中符合条件的最优状态值,以便决定在一个阶段结束的时候采取什么决策。
在Matlab中,可以非常方便地实现动态规划算法。
这里简要介绍一下基于Matlab的动态规划算法的实现及应用。
首先,我们需要定义状态转移方程。
状态转移方程是动态规划算法的核心,决定了如何从一个状态转移到另一个状态。
例如,我们要用动态规划算法求解一个背包问题,物品的重量为w1,w2,w3,w4,w5,物品的价值为v1,v2,v3,v4,v5,背包的容量为W。
那么状态转移方程可以定义如下:dp(i,j) = max(dp(i-1,j), dp(i-1,j-w(i))+v(i))其中dp(i,j)表示前i个物品放入容量为j的背包中所能得到的最大价值。
i表示物品的数量,j表示背包的容量。
w(i)表示第i个物品的重量,v(i)表示第i个物品的价值。
上式中的max表示在当前状态下,应该选择哪个状态值。
然后我们需要初始化第一个状态dp(1,j),当只考虑第1个物品时,dp(1, j)的值与w(1)和v(1)有关。
当物品数量为0时,dp(i, j)的值为0。
接下来,我们可以使用循环以及状态转移方程来计算出dp(i,j)的值,最终得到最优的解。
在Matlab中,可以利用循环完成状态转移方程的计算,例如:dp(1,:) = (w(1) <= j).*v(1);在上述代码中,利用循环计算每个状态的最大价值。
第一行是初始化第一个状态,即当只有一个物品的时候,dp(1, j)的值为v(1)或0。
第二行是循环计算后续状态的最大价值,根据状态转移方程进行计算。
在实际应用中,动态规划算法可以用于诸如最优路径规划、时间序列分析、机器学习等领域。
例如,在机器学习中,动态规划算法可以用于序列模型的预测和分类问题。
基于Matlab的动态规划程序实现
动态规划方法的Matlab 实现与应用动态规划(Dynamic Programming)是求解决策过程最优化的有效数学方法,它是根据“最优决策的任何截断仍是最优的”这最优性原理,通过将多阶段决策过程转化为一系列单段决策问题,然后从最后一段状态开始逆向递推到初始状态为止的一套最优化求解方法。
1.动态规划基本组成(1) 阶段 整个问题的解决可分为若干个阶段依次进行,描述阶段的变量称为阶段变量,记为k(2) 状态 状态表示每个阶段开始所处的自然状况或客观条件,它描述了研究问题过程的状况。
各阶段状态通常用状态变量描述,用k x 表示第k 阶段状态变量,n 个阶段决策过程有n+ 1个状态。
(3) 决策 从一确定的状态作出各种选择从而演变到下一阶段某一状态,这种选择手段称为决策。
描述决策的变量称为决策变量,决策变量限制的取值范围称为允许决策集合。
用()k k u x 表示第k 阶段处于状态k x 时的决策变量,它是k x 的函数。
用()k k D x Dk(xk)表示k x 的允许决策的集合。
(4) 策略 每个阶段的决策按顺序组成的集合称为策略。
由第k 阶段的状态k x 开始到终止状态的后部子过程的策略记为{}11(),(),,()k k k k n n u x u x u x ++ 。
可供选择的策略的范围称为允许策略集合,允许策略集合中达到最优效果的策略称为最优策略。
从初始状态*11()x x =出发,过程按照最优策略和状态转移方程演变所经历的状态序列{}****121,,,,n n x x x x + 称为最优轨线。
(5) 状态转移方程 如果第k 个阶段状态变量为k x ,作出的决策为k u ,那么第k+ 1阶段的状态变量1k x +也被完全确定。
用状态转移方程表示这种演变规律,记为1(,)k k k x T x u +=。
(6) 指标函数 指标函数是系统执行某一策略所产生结果的数量表示,是衡量策略优劣的数量指标,它定义在全过程和所有后部子过程上,用()k k f x 表示。
Matlab中的运动规划与轨迹优化技术
Matlab中的运动规划与轨迹优化技术引言:在现代工程中,如何实现机器人和自动化设备的高效运动规划与轨迹优化成为了一个热门的研究领域。
Matlab作为一种高级的数学建模和仿真工具,为研究者和工程师们提供了许多强大的工具和技术,用于解决运动控制和轨迹优化的相关问题。
本文将介绍Matlab中一些常用的运动规划和轨迹优化技术,以及它们的应用领域和实际案例。
第一部分:运动规划基础1. 运动规划的概念与意义运动规划是指通过合理的算法和技术确定机器人或自动化设备在特定环境中的运动轨迹和关节配置,以实现特定任务。
它在工业生产、机器人导航、医疗手术等领域具有广泛的应用。
Matlab中提供了一系列用于运动规划的工具箱,包括Robotics System Toolbox和Control System Toolbox等,可以帮助工程师们实现复杂的运动规划问题。
2. 运动学建模为了实现运动规划,首先需要对机器人或自动化设备进行运动学建模。
这涉及到对机器人的几何结构和运动学参数进行建模和描述。
Matlab中提供了机器人运动学建模的功能,可以根据机器人类型和几何参数,自动生成运动学模型,为后续的轨迹规划和优化提供基础。
3. 轨迹规划算法在运动规划中,轨迹规划算法起到了关键的作用。
常用的轨迹规划算法包括插值法、最小时间规划法和动态规划法等。
插值法通过线性插值或样条插值的方法,生成平滑的轨迹。
最小时间规划法通过最小化运动时间来规划轨迹,保证在给定的约束条件下,机器人的运动最为高效。
动态规划法则是一种优化方法,通过动态规划的思想,在各种可能的运动轨迹中选择最佳的一条。
第二部分:Matlab中的应用案例1. 工业生产中的运动规划在工业生产中,运动规划和轨迹优化扮演着重要的角色,特别是在自动化装配线和机器人操作中。
通过Matlab中的运动规划工具箱,工程师们可以对机器人进行合理的运动规划,提高生产效率和质量。
例如,在汽车工厂中,通过Matlab进行路径规划和轨迹优化,可以实现机器人自动进行车身焊接和油漆等操作,提高汽车生产线的效率。
动态规划MATLAB求解

例1系统可靠性问题某电子设备由5种元件1,2,3,4,5组成,这5中元件的可靠性分别为0.9,0.8,0.5,0.7,0.6。
为保证电子设备系统的可靠性,同种元件可并联多个。
现在允许设备使用元件的总数为15个,问如何设计使设备可靠性最大的元件安排方案。
解:将该问题看成一个5阶段动态规划问题,每个元件的配置看成一个阶段。
记:x k—配置第k个元件时可用元件的总数(状态变量);u—第k个元件并联的数目(决策变量);kc,—第k个兀件的可靠性;阶段指标函数为:v k(x k,u k)=l-(l-c k)uk;状态转移方程为:kkkkk x=x-u;基本方程为k+1kkf(x,u)=v(x,u),G(a,b)=a-b444444kf(x,u)=min iG(v(x,u),f(x))1u G D(x)J,k=4,3,2,1kkk kkkkk+1k+1kkk根据上面的阶段指标函数,状态转移方程和基本方程,写出下面的4个M函数以备计算调用,函数意义见主函数说明(1)%DecisFl.m(2)SubObjFl.m(3)TransFl.mI、”.,,[□”■.»I-.*I I".»111ifI.”HI.|KI."i....”L.,X|TrsTJ|Ln8GQL□[61®2345c7H.(4) ObjFl.mV.Editor-C=\.Fxngru Fil es ^VATUE ^K2aHffb\nrlE\xiieKiXObjF1-■(5) 调用主程序计算dynexamplel.m3(Z=x2';X t —[x :L^:Jj倉Edlitor —C=\Pro^r au.FileskUTLABkR.2OO6<b^.v0rk\z-LLEixi\drj3i?ii :«pl«1・■口回区1E.L 3.«匚S,a 匚21T KU*匸u 直z ■k二a ■|y”1与|眶 ■斗兔|旦寢丸■吐:E田m LI 鬥二□咱tS iH1j4|+1■■M .•:.-iolc>.c L HMF ; Fl=]5;KL5-t-5&件盘L=[fcl:riAFi^OfclGi S (1^】.1:I].|dyv创4npl4L.r-[p,f]=■DanicF]''E:\J-bQbjF I'TratlsFL','DbJFL')>■lyTipr^c n x H AC L S FL.T>>:)ObJIL ns讯STibObjr]m N TrorisFL.r-:■:wi.;pt(6)主程序dynprog.m(7)MATLAB主窗口运行程序。
基于Matlab的动态规划算法的实现及应用

基于Matlab的动态规划算法的实现及应用动态规划是一种常用的优化算法,可以在给定的约束条件下,求解具有最优解的问题。
它通过将原问题拆分成若干子问题,并保存子问题的解,从而避免重复计算,减少运算量,提高算法的效率。
在Matlab中,可以通过使用递归或迭代的方式来实现动态规划算法。
下面将介绍一种基于Matlab的动态规划算法的实现及应用。
我们需要确定问题的状态,即在求解过程中需要保存的信息。
然后,定义状态转移方程,即问题的解与其子问题的解之间的关系。
确定边界条件,即问题的基本解。
以求解斐波那契数列为例,斐波那契数列的定义如下:F(0) = 0F(1) = 1F(n) = F(n-1) + F(n-2) (n>=2)我们可以使用动态规划算法来求解斐波那契数列。
定义一个数组dp,用来保存每个子问题的解。
然后,通过迭代的方式,计算从小到大的每个子问题的解,直到得到问题的最优解。
在Matlab中,可以使用以下代码实现动态规划算法求解斐波那契数列:```matlabfunction [result] = Fibonacci(n)% 初始化数组dpdp = zeros(1, n+1);% 定义边界条件dp(1) = 0;dp(2) = 1;% 迭代计算每个子问题的解for i = 3:n+1dp(i) = dp(i-1) + dp(i-2);end% 返回问题的最优解result = dp(n+1);end```运行以上代码,输入一个整数n,即可求解斐波那契数列的第n项。
除了求解斐波那契数列,动态规划算法还可以应用于其他许多领域,如路径规划、背包问题等。
在路径规划中,我们可以使用动态规划算法来求解最短路径或最优路径;在背包问题中,我们可以使用动态规划算法来求解能够装入背包的最大价值。
动态规划算法是一种强大的优化算法,在Matlab中的实现也相对简单。
通过定义问题的状态、状态转移方程和边界条件,我们可以使用动态规划算法来求解各种不同类型的问题。
基于Matlab的动态规划算法的实现及应用
基于Matlab的动态规划算法的实现及应用动态规划算法是解决许多计算问题的有效方法,它可以用于组合优化、资源分配和时间序列分析等方面。
Matlab是一种高级计算软件,提供了许多内置函数,使得动态规划算法的实现变得简单。
一、动态规划算法的基本思想动态规划算法是一种优化技术,可以用于解决一些复杂的计算问题。
它的基本思想是把一个大问题分解成一系列子问题,通过解决子问题得到整体的最优解。
在动态规划算法中,通常使用递推式来描述问题的最优解。
在Matlab中,动态规划算法的实现通常包括以下几个步骤:1.定义状态变量:根据问题的特性,定义一组状态变量,用于描述问题的状态。
2.制定状态转移方程:根据问题的条件和规则,制定一组状态转移方程,用于计算问题的最优解。
3.构建转移矩阵:将状态转移方程转化为矩阵形式,便于计算和优化。
4.初始化状态变量:将初始状态赋值给状态变量,用于递推计算。
5.递推计算:根据状态转移矩阵和当前状态,计算下一时刻状态的值,直到达到目标状态。
6.输出最优解:输出最终状态对应的最优解。
三、应用实例1.背包问题背包问题是一种组合优化问题,目标是在给定的一组限制条件下,尽可能地装满容量限制的背包。
动态规划算法可以有效解决背包问题。
function [optx,optf]=knapsack(w,v,c)%w:物品的重量; v:物品的价值; c:背包容量%optx:最优解; optf:最优解对应的函数值n=length(w); %物品数量f=zeros(n+1,c+1); %状态变量fx=zeros(1,n); %物品的选择变量xfor i=1:nfor j=1:cif j<w(i) %背包容量不足的情况f(i+1,j)=f(i,j);else %背包容量足够的情况f(i+1,j)=max(f(i,j),f(i,j-w(i))+v(i));endendendoptf=f(n+1,c); %最优解j=c; %从后往前寻找物品for i=n:-1:1if f(i+1,j)>f(i,j)x(i)=1;j=j-w(i);endendoptx=x; %最优解2.最长公共子序列问题最长公共子序列问题是一种字符串匹配问题,目标是在两个字符串中找到最长的公共连续子序列。
基于Matlab的动态规划算法的实现及应用

基于Matlab的动态规划算法的实现及应用动态规划算法是一种解决多阶段决策问题的优化方法,它可以在每个阶段选择最优决策,并且在各个阶段间保持最优子结构,从而达到整体最优的目的。
在实际应用中,动态规划算法被广泛用于求解优化问题、路径规划、资源分配等方面。
本文将介绍基于Matlab 的动态规划算法的实现及应用,并深入探讨其在实际问题中的应用。
一、动态规划算法的基本原理动态规划算法的基本原理是通过将问题分解为子问题,并计算每个子问题的最优解,然后存储下来以供后续使用。
最终得到整体最优解。
动态规划算法通常包括以下几个步骤:1. 确定状态和状态转移方程:首先需要确定问题的状态,然后建立状态之间的转移关系,也就是状态转移方程。
状态转移方程描述了问题的子问题之间的关系,是动态规划算法的核心。
2. 初始化:初始化动态规划数组,将初始状态下的值填入数组中。
3. 状态转移:利用状态转移方程计算出各个阶段的最优解,并将其存储在动态规划数组中。
4. 求解最优解:根据动态规划数组中存储的各个阶段的最优解,可以得到整体最优解。
Matlab是一种强大的计算软件,具有丰富的数值计算函数和可视化工具,非常适合实现动态规划算法。
下面以一个简单的背包问题为例,介绍如何在Matlab中实现动态规划算法。
假设有n件物品,每件物品的重量为w[i],价值为v[i]。
现在有一个容量为C的背包,问如何选择物品放入背包,使得背包中物品的总价值最大。
我们需要确定问题的状态和状态转移方程。
在这个问题中,我们可以定义状态dp[i][j]表示在前i件物品中选择若干个放入容量为j的背包中所能获得的最大价值。
状态转移方程可以表示为:dp[i][j] = max(dp[i-1][j], dp[i-1][j-w[i]] + v[i])然后,我们可以利用Matlab实现这个动态规划算法,代码如下:```matlabfunction max_value = knapsack(w, v, C)n = length(w);dp = zeros(n+1, C+1);for i = 1:nfor j = 1:Cif j >= w(i)dp(i+1,j+1) = max(dp(i,j+1), dp(i,j-w(i)+1)+v(i));elsedp(i+1,j+1) = dp(i,j+1);endendendmax_value = dp(n+1,C+1);end```三、动态规划算法在实际问题中的应用动态规划算法在实际问题中有着广泛的应用,下面以路径规划问题为例,介绍动态规划算法的应用。
matlab动态系统仿真实例

%|R=L=C=1|:R = 1; L = 1; C = 1;G = tf([1/(R*C) 0],[1 1/(R*C) 1/(L*C)])Transfer function:s-----------s^2 + s + 1Next, use bode to plot the frequency response of the circuit:bode(G), gridAs expected, the RLC filter has maximum gain at the frequency 1 rad/s. However, the attenuation is only -10dB half a decade away from this frequency. To get a narrower passing band, try increasing values of R as follows:R1 = 5; G1 = tf([1/(R1*C) 0],[1 1/(R1*C) 1/(L*C)]);R2 = 20; G2 = tf([1/(R2*C) 0],[1 1/(R2*C) 1/(L*C)]);bode(G,'b',G1,'r',G2,'g'), gridlegend('R = 1','R = 5','R = 20')The resistor value R=20 gives a filter narrowly tuned around the target frequency of 1 rad/s.1.3 Analyzing the Time Response of the CircuitWe can confirm the attenuation properties of the circuit G2 (R=20) by simulating how this filter transforms sine waves with frequency 0.9, 1, and 1.1 rad/s:t = 0:0.05:250;subplot(311), lsim(G2,sin(t),t), title('w = 1')subplot(312), lsim(G2,sin(0.9*t),t), title('w = 0.9')subplot(313), lsim(G2,sin(1.1*t),t), title('w = 1.1')The waves at 0.9 and 1.1 rad/s are considerably attenuated. The wave at 1 rad/s comes out unchanged once the transients have died off. The long transient results from the poorly damped poles of the filters, which unfortunately are required for a narrow passing band:damp(pole(G2))Eigenvalue Damping Freq. (rad/s)-2.50e-002 + 1.00e+000i 2.50e-002 1.00e+000-2.50e-002 - 1.00e+000i 2.50e-002 1.00e+000The following system parameters are assumed:a0 = 1e5;w1 = 1e4;w2 = 1e6;Next, you want to create a transfer function model of this system using Control System Toolbox. This model will be stored in the MATLAB® workspace as an LTI object.First, define the Laplace variable, s, using the TF command. Then use 's' to construct the open-loop transfer function, a(s):s = tf('s');a = a0/(1+s/w1)/(1+s/w2)Transfer function:100000---------------------------1e-010 s^2 + 0.000101 s + 1You can view the frequency response of a(s) using the BODEPLOT command:h = bodeplot(a,'r');setoptions(h,'FreqUnits','rad/sec','MagUnits','dB','PhaseUnits','deg',...'YLimMode','Manual','YLim',{[0,110],[-180,0]});Right-click on the plot to access a menu of properties for this Bode Diagram. Left-click on the curves to create moveable data markers which can be used to obtain response details.You can view the normalized step response of a(s) using the STEPPLOT and DCGAIN commands:a_norm = a / dcgain(a);stepplot(a_norm,'r')title('Normalized Open-Loop Step Response');ylabel('Normalized Amplitude');Right-click on the plot and select "Characteristics -> Settling Time" to display the settling time. Hold the mouse over the settling time marker to reveal the exact value of the settling time. 2.2 Feedback AmplifierNow add a resistive feedback network and wire the system as a non-inverting amplifier.This feedback network, b(s), is simply a voltage divider with input Vo and output Vn. Solving for the ratio Vn/Vo yields the transfer function for b(s):b = Vn / Vo = R1 / (R1 + R2)The block diagram representation of the system is shown below.Solving for the ratio Vo/Vp yields the closed-loop gain, A(s):A = Vo / Vp = a / (1 + ab)If the product 'ab' is sufficiently large (>>1), then A(s) may be approximated asA = 1 / bNow assume that you need to design an amplifier of dc gain (Vo/Vp) 10 and that R1 is fixed at 10 kOhm. Solving for R2 yields:A0 = 10;b = 1 / A0; % approximation for ab>>1R1 = 10000;R2 = R1 * (1/b - 1)R2 =90000Construct the closed-loop system using the FEEDBACK command:A = feedback(a,b);Next, plot the frequency responses of a(s) and A(s) together using the BODEMAG command:bodemag(a,'r',A,'b');legend('Open-Loop Gain (a)','Closed-Loop Gain (A)')set(gca,'YLim',[0,110])% Annotationsopampdemo_annotate(1)The use of negative feedback to reduce the low-frequency (LF) gain has led to a corresponding increase in the system bandwidth (defined as the frequency where the gain drops 3dB below its maximum value).This gain / bandwidth tradeoff is a powerful tool in the design of feedback amplifier circuits. Since the gain is now dominated by the feedback network, a useful relationship to consider is the sensitivity of this gain to variation in the op amp's natural (open-loop) gain.Before deriving the system sensitivity, however, it is useful to define the loop gain, L(s)=a(s)b(s), which is the total gain a signal experiences traveling around the loop:L = a * b;You will use this quantity to evaluate the system sensitivity and stability margins.The system sensitivity, S(s), represents the sensitivity of A(s) to variation in a(s).The inverse relationship between S(s) and L(s) reveals another benefit of negative feedback: "gain desensitivity".S = 1 / (1 + L);S(s) has the same form as the feedback equation and, therefore, may be constructed using the more-robust FEEDBACK command:S = feedback(1,L);The magnitudes of S(s) and A(s) may be plotted together using the BODEMAG command:bodemag(A,'b',S,'g')legend('Closed-Loop Gain(A)', 'System Sensitivity(S)',4)The very small low-frequency sensitivity (about -80 dB) indicates a design whose closed-loop gain suffers minimally from open-loop gain variation. Such variation in a(s) is common due to manufacturing variability, temperature change, etc.You can check the step response of A(s) using the STEPPLOT command:stepplot(A)%Annotationopampdemo_annotate(2)Note that the use of feedback has greatly reduced the settling time (by about 98%). However, the step response now displays a large amount of ringing, indicating poor stability margin.You can analyze the stability margin by plotting the loop gain, L(s), with the MARGIN command:margin(L)The resulting plot indicates a phase margin of less than 6 degrees. You will need to compensate this amplifier in order to raise the phase margin to an acceptable level (generally 45 deg or more), thus reducing excessive overshoot and ringing.2.3 Feedback Lead CompensationA commonly used method of compensation in this type of circuit is "feedback lead compensation". This technique modifies b(s) by adding a capacitor, C, in parallel with thefeedback resistor, R2.The capacitor value is chosen so as to introduce a phase lead to b(s) near the crossover frequency, thus increasing the amplifier's phase margin.The new feedback transfer function is shown below.You can approximate a value for C by placing the zero of b(s) at the 0dB crossover frequency of L(s):[Gm,Pm,Wcg,Wcp] = margin(L);C = 1/(R2*Wcp)C =1.1139e-012To study the effect of C on the amplifier response, create an LTI model array of b(s) for several values of C around your initial guess:K = R1/(R1+R2);C = [1:.2:3]*1e-12;for n = 1:length(C)b_array(:,:,n) = tf([K*R2*C(n) K],[K*R2*C(n) 1]);endNow you can create LTI arrays for A(s) and L(s):A_array = feedback(a,b_array);L_array = a*b_array;You can plot the step response of all models in the LTI array, A_array(s), together with A(s) using the STEPPLOT command:stepplot(A,'b:',A_array,'b',[0:.005:1]*1.5e-6);title('Closed-Loop Step Response (Compensated)');% Plot Annotationsopampdemo_annotate(3)The phase margins for our loop gain array, L_array(s), are found using the MARGIN command: [Gm,Pm,Wcg,Wcp] = margin(L_array);The phase margins may now be plotted as a function of C.plot(C*1e12,Pm,'g');set(gca,'XLim',[0.8 3.6],'YLim',[45 60],'Box','on')xlabel('Compensation Capacitor, C (pF)');ylabel('Phase Margin (deg)')% Plot Annotationsopampdemo_annotate(4)A maximum phase margin of 58 deg is obtained when C=2pF (2e-12).The model corresponding to C=2pF is the sixth model in the LTI array, b_array(s). You can plot the step response of the closed- loop system for this model by selecting index 6 of the LTI array A_array(s):A_comp = A_array(:,:,6);stepplot(A,'b:',A_comp,'b')legend('Uncompensated (0 pF)','Compensated (2 pF)')Note that the settling time has been further reduced (by an additional 85%).We can overlay the frequency-response of all three models (open-loop, closed-loop,compensated closed-loop) using the BODE command:bodeplot(a,'r',A,'b:',A_comp,'b')legend('a(s)','A(s)','A\_comp(s)');Note how the addition of the compensation capacitor has eliminated peaking in the closed-loop gain and also greatly extended the phase margin.2.4 SummaryA brief summary of the choice of component values in the design of this non-inverting feedback amplifier circuit:Final component values: R1 = 10 kOhm, R2 = 90 kOhm, C = 2 pF.A resistive feedback network (R1,R2) was selected to yield a broadband amplifier gain of 10(20 dB).Feedback lead compensation was used to tune the loop gain near near the crossoverfrequency. The value for the compensation capacitor, C, was optimized to provide amaximum phase margin of about 58 degrees.。
基于Matlab的动态规划算法的实现及应用
基于Matlab的动态规划算法的实现及应用动态规划算法是一种解决多阶段决策过程的优化问题的方法,它可以用于求解最优化问题、路径规划、序列匹配等多种应用场景。
在计算机科学领域,动态规划算法被广泛应用于图像处理、机器学习、自然语言处理等诸多领域中。
本文介绍了基于Matlab的动态规划算法的实现及其应用。
一、动态规划算法概述动态规划算法是一种通过将原问题分解成子问题来求解最终问题的优化方法。
它的核心思想是利用子问题的最优解来推导出原问题的最优解。
动态规划算法通常用于解决有重叠子问题和最优子结构性质的问题,这些问题的解可以通过递归地求解子问题而得到。
动态规划算法的一般步骤如下:1. 定义子问题:将原问题分解成若干子问题,确定子问题的状态和状态转移方程。
2. 利用子问题的最优解来递推原问题的最优解,并存储中间结果。
动态规划算法具有较强的通用性和灵活性,可以适用于多种不同类型的问题,如背包问题、最短路径问题、序列匹配问题等。
尤其在处理具有多阶段决策过程的问题时,动态规划算法能够有效地求解最优解。
二、Matlab中的动态规划算法实现Matlab是一种功能强大的科学计算软件,它提供了丰富的数值计算和数据可视化功能,也支持通过编程语言实现各种算法。
在Matlab中,可以通过编写脚本或函数来实现动态规划算法。
下面以一个经典的动态规划问题——斐波那契数列为例,介绍如何在Matlab中实现动态规划算法。
斐波那契数列是一个经典的递归算法问题,其定义如下:F(0) = 0F(1) = 1F(n) = F(n-1) + F(n-2),其中n>1我们可以用递归的方式来求解斐波那契数列:```matlabfunction result = fibonacci(n)if n == 0result = 0;elseif n == 1result = 1;elseresult = fibonacci(n-1) + fibonacci(n-2);endend```递归方法存在重复计算的问题,效率较低。
物流系统动态规划算法经典例题matlab

物流系统动态规划算法经典例题matlab
1、生产计算问题
工厂生产某种产品,每单位(千件)的成本为1 (千元),每次开工的固定成本为3(千元),工厂每季度的最大生产能力为6 (千件)。
经调查,市场对该产品的需求量第一、二、三、四季度分别为2, 3,2,4 (千件)。
如果工厂在第一、二季度将全年的需求都生产出来,自然可以降低成本(少付固定成本费),但是对于第三、四季度才能上市的产品需付存储费,每季每千件的存储费为0.5 (千元)。
还规定年初和年末这种产品均无库存。
试制定-一个生产计划,即安排每个季度的产量,使一年的总费用(生产成本和存储费)最少。
2、背包问题
有编号分别为a,b,c,d,e 的五种金银物品,它们的重量分别是2,2,6,5,4,它们的价值分别为6,3,5,4,6,现有一个承重为10的背包,如何让背包带走金银物品的价值总和最大?。
动态规划讲义 含matlab算法
例 3 图 货郎担问题Fra bibliotek例 4 图 旅行路线图
【分析】这两个问题看起来很非常相似,但本质上是完全不同的。为了方便讨论,可 以将每个顶点标记号码。由于必然经过最右边的顶点 7,所以一条路(P1-P2)可以看做两条 路(P1-7)与(P2-7)的结合。因此,这个题目的状态可以用两条道路结合的形式表示。可以 把这些状态中,两条路中起始顶点相同的状态归于一个阶段,设为阶段[P1,P2]。
S2: K=2,有: F2(B1)=min{d2(B1,C1)+F3(C1),d2(B1,C2)+f3(C2),d2(B1,C3)+F3(C3)}=min {9,12,14}=9
F2(m)=min{d2(B2,c2)+f3(C2),d2(B2,C4)+F3(C4)}=min{16,10}=10
S4:k=1,有: F1(A)=min{d1(A,B1)+F2(B1),d1(A,B2)+F2(B2)}=min{13,13}=13
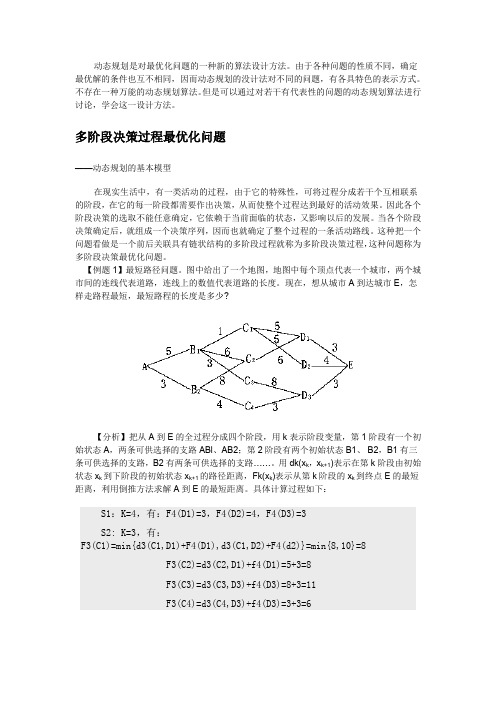
在现实生活中,有一类活动的过程,由于它的特殊性,可将过程分成若干个互相联系 的阶段,在它的每一阶段都需要作出决策,从而使整个过程达到最好的活动效果。因此各个 阶段决策的选取不能任意确定,它依赖于当前面临的状态,又影响以后的发展。当各个阶段 决策确定后,就组成一个决策序列,因而也就确定了整个过程的一条活动路线。这种把一个 问题看做是一个前后关联具有链状结构的多阶段过程就称为多阶段决策过程,这种问题称为 多阶段决策最优化问题。
最优化原理与无后效性
上面已经介绍了动态规划模型的基本组成,现在需要解决的问题是:什么样的“多阶段 决策问题”才可以采用动态规划的方法求解?
一般来说,能够采用动态规划方法求解的问题必须满足.最优化原理和.无后效性原则。
动态规划方法的matlab实现及其应用
动态规划方法的matlab实现及其应用(龙京鹏,张华庆,罗明良,刘水林) (南昌航空大学,数学与信息科学学院,江西,南昌)摘要:本文运用matlab语言实现了动态规划的逆序算法,根据状态变量的维数,编写了指标函数最小值的逆序算法递归计算程序。
两个实例的应用检验了该程序的有效性,同时也表明了该算法程序对众多类典型的动态规划应用问题尤其是确定离散型的应用问题的通用性,提供了求解各种动态规划问题的有效工具。
关键词:动态规划基本方程的逆序算法 MATLAB实现MATLAB Achieve For Dynamic Programming and Its Application(JingpengLong,HuaqingZhang,MingliangLuo,ShuilinLiu)(School of Mathematics and Information Science,Nanchang HangkongUniversity,Nanchang,China)Abstract:This article achieves the reverse algorithm of dynamic programming by using the matlab language,and prepares the recursive calculation program of reverse algorithm which thetargetfunctionvalueisthesmallest.Theapplicationoftwoexamplesshowthattheprogram is effective,and this algorithm program is general to many typical application of dynamic programming,especially the application of deterministic discrete.This algorithm program provides a effective tool to the solution of a variety of dynamic programming problems. Key words:dynamic programming;reverse algorithm;Matlab achievement动态规划是一类解决多阶段决策问题的数学方法, 在工程技术、科学管理、工农业生产及军事等领域都有广泛的应用。
matlab 动态规划讲义
第四章动态规划§1 引言1.1 动态规划的发展及研究内容动态规划(dynamic programming)是运筹学的一个分支,是求解多阶段决策问题的最优化方法。
20世纪50年代初R. E. Bellman等人在研究多阶段决策过程(multistep decision process)的优化问题时,提出了著名的最优性原理(principle of optimality),把多阶段过程转化为一系列单阶段问题,逐个求解,创立了解决这类过程优化问题的新方法—动态规划。
1957年出版了他的名著《Dynamic Programming》,这是该领域的第一本著作。
动态规划问世以来,在经济管理、生产调度、工程技术和最优控制等方面得到了广泛的应用。
例如最短路线、库存管理、资源分配、设备更新、排序、装载等问题,用动态规划方法比用其它方法求解更为方便。
虽然动态规划主要用于求解以时间划分阶段的动态过程的优化问题,但是一些与时间无关的静态规划(如线性规划、非线性规划),只要人为地引进时间因素,把它视为多阶段决策过程,也可以用动态规划方法方便地求解。
应指出,动态规划是求解某类问题的一种方法,是考察问题的一种途径,而不是一种特殊算法(如线性规划是一种算法)。
因而,它不象线性规划那样有一个标准的数学表达式和明确定义的一组规则,而必须对具体问题进行具体分析处理。
因此,在学习时,除了要对基本概念和方法正确理解外,应以丰富的想象力去建立模型,用创造性的技巧去求解。
例1 最短路线问题下面是一个线路网,连线上的数字表示两点之间的距离(或费用)。
试寻求一条由A到G距离最短(或费用最省)的路线。
例2 生产计划问题工厂生产某种产品,每单位(千件)的成本为1(千元),每次开工的固定成本为3(千元),工厂每季度的最大生产能力为6(千件)。
经调查,市场对该产品的需求量第一、二、三、四季度分别为2,3,2,4(千件)。
如果工厂在第一、二季度将全年的需求都生产出来,自然可以降低成本(少付固定成本费),但是对于第三、四季度才能上市的产品需付存储费,每季每千件的存储费为0.5(千元)。
动态规划matlab仿真实例(整理)
动态规划在火力分配中地应用1.问题描述设有m个目标,目标价值(重要性和危害性)各不相同,用数值A< ( K=1, 2, ..m )表示,计划用n枚导弹突袭,导弹击毁目标地概率P K=1,其中儿是常数,取决于导弹地特性与目标地性质;i为向目标发射地导弹数,问题:做出方案使预期地突击效果最大.2.问题建模上述冋题可以表述为max卩=£化弹认1 - e耳叫)约束条件为睨“叫二薜严为非负整数)3.算法描述下面通过一个实例说明:设目标数目为4 (m=4),导弹为5 (n=5),'和a K取值情况如下表所示:表1: A k''取值情况将火力分配可分为4个阶段,每个阶段指标函数为:^1) = 8(1 -叫%(叫}= 7(1 -严® 叭) = 6(1 -""叫3(1 -严爲二可能取值为0, 1, 2, 3, 4, 5,将函数值带人如下表:表2函数值动态规划问题基本方程为: :1■- '■ ■■-' . '■ - :i c■「=0逐次向前推一级 K=3 =max +{E 3(U 3) + <4(x 3- ii 3)} = max (6(1 -e °”叫〕打(工3 -旳)}K=2 K=1 『2(勺)fi %)=max {/2(u 2) + f 3(x 2-u 2)) = max {7(1 - e °叫)+ 応区-沟)}=mux {A 】(叫)+ 爲(尤]一强J} = max {8(1 - e °3 1 +- u i)J只需要求解':':,地最大值然后反推回去就可以获得最优地分配方案4. Matlab 仿真求解因为' 与'取值为整数,可以采用动态规划地方法,获得':':,地最大值,对应地最优方案function[p_opt,fval]=dynprog(x,DecisFun,SubObjFun,TransFun,ObjFun) % 求解动态规划问题最小值函数 判断决策级数 非空状态矩阵。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动态规划在火力分配中地应用.
1.问题描述
设有m个目标,目标价值(重要性和危害性)各不相同,用数值A(K=1,K
=,其n枚导弹突袭,导弹击毁目标地概率P2,..m)表
示,计划用K为向目标发射地导弹数,问是常数,取决于导弹地特性与目标地性质;中题:做出方案使预期地突击效果最大.
2.问题建模
上述问题可以表述为
约束条件为
(为非负整数)
3.算法描述
),和(n=5am=4下面通过一个实例说明:设目标数目为4(),导弹为5K取值情况如下表所示:表1:A取值情况k
4 2 3 1 K 目标 3 6 7 8
0.9
0.3
0.2
将火力分配可分为4个阶段,每个阶段指标函数为:
可能取值为0,1,2,3,4,5,将函数值带人如下表:表2函数值
u
0 0 0 0 0
1.79 1 1.81 1.45
2.36
2.51 2
3.16 2.64 3.79
2.81 4.66 3 4.15
3.61
2.93 4 4.89 5.19 4.41
5
5.44
5.06 5.51
动态规划问题基本方程为:
c
=0
逐次向前推一级
K=4
K=3
K=2
K=1
()
地最大值然后反推回去就可以获得最优地分配方案只需要求解4.Matlab仿
真求解
地最大值,对应取值为整数,可以采用动态规划地方法,获得与因为
地最优方案
function[p_opt,fval]=dynprog(x,DecisFun,SubObjFun,TransFun,ObjFun)
%求解动态规划问题最小值函数
k=length(x(1,:)) %判断决策级数
x_isnan=~isnan(x)。
% 非空状态矩阵
t_vubm=inf*ones(size(x))。
% 性能指标中间矩阵
f_opt=nan*ones(size(x))。
% 总性能指标矩阵
d_opt=f_opt。
%每步决策矩阵
tmp1=find(x_isnan(:,k))。
% 最后一步状态向量
tmp2=length(tmp1)。
% 最后一步状态个数
for i=1:tmp2
u=feval(DecisFun,k,x(tmp1(i),k))。
tmp3=length(u)。
%决策变量
for j=1:tmp3 % 求出当前状态下所有决策地最小性能指标
tmp=feval(SubObjFun,k,x(tmp1(i),k),u(j))。
if tmp <= t_vubm(i,k) %t_vub
f_opt(i,k)=tmp。
d_opt(i,k)=u(j)。
t_vubm(i,k)=tmp。
end。
end。
end
for ii=k-1:-1:1
tmp10=find(x_isnan(:,ii))。
tmp20=length(tmp10)。
for i=1:tmp20 %求出当前状态下所有可能地决策
u=feval(DecisFun,ii,x(tmp10(i),ii))。
tmp30=length(u) 。
for j=1:tmp30 % 求出当前状态下所有决策地最小性能指标
tmp00=feval(SubObjFun,ii,x(tmp10(i),ii),u(j))。
% 单步性能指标
tmp40=feval(TransFun,ii,x(tmp10(i),ii),u(j))。
% 下一状态
tmp50=x(:,ii+1)-tmp40。
% 找出下一状态在 x 矩阵地位置
tmp60=find(tmp50==0) 。
if~isempty(tmp60)
if nargin<6 %矩阵不同需要修改nargin地值,很重要
tmp00=tmp00+f_opt(tmp60(1),ii+1)。
% set the default object value else
tmp00=feval(ObjFun,tmp00,f_opt(tmp60(1),ii+1))。
end %当前状态地性能指标
if tmp00<=t_vubm(i,ii)
f_opt(i,ii)=tmp00。
d_opt(i,ii)=u(j)。
t_vubm(i,ii)=tmp00.
end。
end。
end。
end。
end
fval=f_opt(:,1)。
tmp0 = find(~isnan(fval))。
fval=fval(tmp0,1)。
p_opt=[]。
tmpx=[]。
tmpd=[]。
tmpf=[]。
tmp01=length(tmp0)。
for i=1:tmp01
tmpd(i)=d_opt(tmp0(i),1)。
tmpx(i)=x(tmp0(i),1)。
tmpf(i)=feval(SubObjFun,1,tmpx(i),tmpd(i))。
p_opt(k*(i-1)+1,[1,2,3,4])=[1,tmpx(i),tmpd(i),tmpf(i)]。
for ii=2:k
tmpx(i)=feval(TransFun,ii,tmpx(i),tmpd(i))。
tmp1=x(:,ii)-tmpx(i)。
tmp2=find(tmp1==0)。
if ~isempty(tmp2)
tmpd(i)=d_opt(tmp2(1),ii)。
end
tmpf(i)=feval(SubObjFun,ii,tmpx(i),tmpd(i))。
p_opt(k*(i-1)+ii,[1,2,3,4])=[ii,tmpx(i),tmpd(i),tmpf(i)]。
end。
end。
下面编写四个函数:
function u = DecisF1( k,x ) %决策函数
if k==4
u=x。
else
u=0:x。
end
function y = TransF1( k,x,u )%状态转移方程
y=x-u。
function v = SubObjF1( k,x,u )%阶段k地指标函数
a=[0.2,0.3,0.5,0.9]。
A=[8,7,6,3]。
v=A(k)*(1-exp(-a(k)*u))。
v=-v。
%max变为min
function y = ObjF1( v,f )%基本方程中地函数
y=v+f。
y=-y。
%max变为min
测试代码:。
clear
n=5。
x1=[n。
nan*ones(n,1)]。
x2=0:n。
x2=x2'。
x=[x1,x2,x2,x2]。
[p,f]=dynprog(x,'DecisF1','SubObjF1','TransF1','ObjF1')
%p为分配方案,f为结果
5.Matlab仿真结果分析
运行结果显示:
P为方案:
即对目标1发射1枚导弹,对目标2发射1枚,对目标3发射2枚,对目标4发生1枚导弹,能获得最大效能.
f为最大地效能:
即在这种分配下地最大效能为8.8374。