陀螺仪”和“加速度计”工作原理
陀螺仪和加速度计的精度漂移原理

陀螺仪和加速度计的精度漂移原理
陀螺仪和加速度计是惯性传感器,用于测量物体的姿态和加速度。
它们都存在
精度漂移的问题,但原理略有不同。
陀螺仪通过测量物体的角速度来确定其旋转状态。
其精度漂移主要由两个原因
引起:器件内部的噪声和器件本身的不完美特性。
首先,陀螺仪内部存在噪声源,如温度变化、电子元件的不均匀性和机械振动等。
这些噪声会引起输出信号的波动,从而导致精度漂移。
此外,陀螺仪的灵敏度也可能会随时间发生变化,进一步增加了漂移的可能性。
其次,陀螺仪的不完美特性也会导致精度漂移。
例如,陀螺仪的零偏误差(Bias)是指在无旋转状态下输出的非零信号,这会导致姿态测量的误差。
此外,
陀螺仪还可能受到机械结构的非线性影响,进一步增加了精度漂移的可能性。
与陀螺仪不同,加速度计测量的是物体的加速度。
它的精度漂移主要由重力、
振动和温度等因素引起。
首先,重力是一个常量,但在实际应用中,加速度计可能受到非重力加速度的
影响,例如振动或外力干扰。
这些非重力加速度会引起加速度计输出的误差,从而导致精度漂移。
其次,加速度计的灵敏度也可能受到温度的影响。
温度变化会导致加速度计内
部元件的特性发生变化,从而引起输出信号的波动。
综上所述,陀螺仪和加速度计的精度漂移主要受到内部噪声、器件特性、重力、振动和温度等因素的影响。
为了减少精度漂移,常常需要采取校准、滤波、温度补偿等方法来对传感器进行校正和补偿,以提高其测量的准确性和稳定性。
陀螺仪和加速度计原理

陀螺仪和加速度计原理陀螺仪和加速度计是惯性传感器的两种常见类型,它们经常被用于测量和监测物体的运动状态。
陀螺仪测量物体的角速度,而加速度计测量物体的线性加速度。
陀螺仪的工作原理基于角动量守恒定律。
当物体绕某一轴旋转时,它具有角动量,即物体的质量乘以角速度。
陀螺仪通过使用旋转部件,如陀螺或振荡器,来测量角速度。
当物体进行旋转时,旋转部件会受到作用力,这会导致旋转部件发生位移。
通过测量位移,就可以计算物体的角速度。
然而,陀螺仪存在一个问题,即在长时间的使用中,由于摩擦和其他因素的影响,它会产生漂移,即测量值与真实值之间的误差会逐渐增加。
为了解决这个问题,通常需要使用其他传感器或算法来进行校准和修正。
与陀螺仪相比,加速度计更为简单。
加速度计的工作原理基于牛顿第二定律,即物体的加速度与施加在物体上的力成正比。
加速度计通过测量物体的加速度来确定物体的线性运动状态。
加速度计通常使用微小的弹簧系统或微机电系统(MEMS)来测量物体的加速度。
当物体发生加速或减速时,弹簧系统或MEMS传感器会受到作用力,从而引起位移。
通过测量位移,就可以计算物体的加速度。
然而,与陀螺仪类似,加速度计也存在一些问题。
例如,它对重力的感知会产生误差。
为了解决这个问题,通常需要使用其他传感器或算法来进行校准和修正。
综上所述,陀螺仪和加速度计是常见的惯性传感器,它们可以用于测量物体的角速度和线性加速度。
它们的工作原理分别基于角动量守恒定律和牛顿第二定律。
尽管它们各自具有一些问题,但在现代技术中,它们通常与其他传感器和算法结合使用,以提高测量精度和准确性。
MEMS加速度计(accelerometer)与陀螺仪的(gyroscope)原理介绍

基本應用原理
• F:物體所受合外力 • m:物體質量 • a:物體的加速度
• k:物質的彈性係數 • x:位移量
• C:電容量 • ε:介電常數 • A:極板截面積 • d:板間距離
MEMS加速度計原理
物體的加速度=物質的彈性係數X位移量/物體質量
A A點移動到B點
距離=1/2加速度 ×時間平方
• 陀螺儀又名角速度計,利用內部振動機械結構感測物體轉動所產生角速度, 進而計算出物體移動的角度。
• 兩者看起來很接近,不過加速度計只能偵測物體的移動行為,並不具備精確 偵測物體角度改變的能力,陀螺儀可以偵測物體水平改變的狀態,但無法計 算物體移動的激烈程度。
• 用簡單的例子就是Eee Stick 體感遙控器,這是一個類似 Wii 遊戲的遙控捍 , 例如玩平衡木遊戲,當搖桿向前傾斜時,陀螺儀用來計算搖桿傾斜的角度, 三軸加速度計可以偵測搖桿晃動的劇烈程度以及搖桿是否持續朝斜下方。
MEMS陀螺儀工作原理
• MEMS陀螺儀依賴於由相互正交的振動和轉動引起的交變 科氏力。振動物體被柔軟的彈性結構懸掛在基底之上。整 體動力學系統是二維彈性阻尼系統,在這個系統中振動和 轉動誘導的科氏力把正比於角速度的能量轉移到傳感模式。
Hale Waihona Puke 影響MEMS信號輸出因素• 透過改進設計和靜電調試使得驅動和傳感的共振頻率一致,以實現最大可能 的能量轉移,從而獲得最大靈敏度。大多數MEMS陀螺儀驅動和傳感模式完 全匹配或接近匹配,它對系統的振動參數變化極其敏感,而這些系統參數會 改變振動的固有頻率,因此需要一個好的控制架構來做修正。如果需要高的 品質因子(Q),驅動和感應的頻寬必須很窄。增加1%的頻寬可能降低20%的 信號輸出。(圖 a) 還有阻尼大小也會影響信號輸出。(圖 b)
惯性导航的原理
惯性导航的原理惯性导航是一种基于惯性传感器测量的导航技术,它可以独立于外界参考,为导航系统提供必要的位置、速度和姿态信息。
惯性导航系统主要由加速度计和陀螺仪组成,通过测量加速度和角速度来推算出位置、速度和姿态等相关信息。
惯性导航的原理可以分为两个方面:加速度计和陀螺仪。
一、加速度计:加速度计是惯性导航系统中的一个重要传感器,它能够测量物体在三维空间中的加速度。
加速度计的工作原理是基于牛顿第二定律,通过测量物体受到的惯性力大小来推算出物体的加速度。
加速度计通常采用压电效应或微机械系统(MEMS)技术来实现测量。
当一个物体处于静止状态时,加速度计可以测量出物体所受到的地心引力加速度,即9.8米/秒²。
当物体发生运动时,加速度计可以测量出物体除地心引力之外的其他加速度。
通过对加速度的积分,可以得到物体的速度和位置信息。
然而,由于加速度测量中存在累积误差和噪声,积分过程会导致速度和位置信息的漂移。
二、陀螺仪:陀螺仪是另一个重要的惯性导航传感器,它能够测量物体在三维空间中的角速度。
陀螺仪的工作原理是基于陀螺效应,即物体在旋转时会产生角动量。
陀螺仪通过测量角动量的大小和方向来推算出物体的角速度。
陀螺仪通常采用悬挂式陀螺或光纤陀螺等技术来实现测量。
陀螺仪具有高精度和高灵敏度的特点,可以提供准确的角速度信息。
通过对角速度的积分,可以推算出物体的姿态信息,比如俯仰角、滚转角和偏航角等。
综合应用加速度计和陀螺仪的测量结果,惯性导航系统可以实现导航信息的获取。
加速度计提供了物体的加速度,而陀螺仪提供了物体的角速度,通过对加速度和角速度的积分,可以得到物体的速度和位置信息。
此外,陀螺仪还可以提供物体的姿态信息。
然而,惯性导航系统存在一定的问题和挑战。
首先,加速度计和陀螺仪本身存在噪声和漂移问题,这会导致定位和姿态信息的不准确性和不稳定性。
其次,积分过程会导致误差的累积,导致位置和姿态信息的漂移。
为了解决这些问题,通常需要结合其他导航系统,如全球定位系统(GPS)或视觉传感器等,进行信息融合处理,以提高惯性导航系统的精度和稳定性。
a+gsensorg工作原理
a+gsensorg工作原理
A+Gsensor是一种加速度计和陀螺仪的组合传感器,它可以测量物体的加速度和角速度。
它的工作原理涉及到两种主要的传感器技术,加速度计和陀螺仪。
首先,让我们来看加速度计的工作原理。
加速度计是一种能够测量物体加速度的传感器。
它通常基于微机电系统(MEMS)技术,内部包含微小的质量块和传感器元件。
当物体加速或减速时,质量块会受到力的作用而产生位移,传感器会测量这种位移并将其转换为数字信号。
通过分析这些数字信号,我们可以得知物体的加速度大小和方向。
其次,陀螺仪是另一种关键的传感器技术。
陀螺仪可以测量物体的角速度,即物体围绕自身旋转的速度。
它的工作原理基于角动量守恒定律,通过测量旋转质量块的角位移来检测物体的旋转。
陀螺仪也使用MEMS技术,将角速度转换为数字信号,从而实现对物体旋转状态的监测。
A+Gsensor将这两种传感器技术结合在一起,可以同时测量物体的加速度和角速度。
通过对这些数据进行分析,我们可以获得关
于物体运动状态的详细信息,例如加速度的变化、旋转的角速度等。
这种组合传感器在许多领域都有广泛的应用,包括智能手机、平衡车、无人机等。
它的工作原理使得我们能够更全面地了解物体的运
动特性,为各种应用提供了重要的数据支持。
陀螺仪加速度计的工作原理

陀螺仪加速度计的工作原理好嘞,今天咱们聊聊陀螺仪和加速度计这俩家伙,它们可是现代科技的“顶梁柱”。
你要是觉得它们听起来高大上,那就真是小看了它们的日常工作。
想象一下,当你在玩手机游戏,手机屏幕上那些炫酷的动作、流畅的操作,背后可少不了它们的功劳。
陀螺仪就像一个聪明的导航员,它能知道你手机的倾斜角度。
比如说你横着玩游戏,陀螺仪会“呐喊”一声:嘿,别忘了,我在这里!然后,屏幕就会跟着你手机的姿势来个大变身,简直酷毙了!再说说加速度计,它可不是一个普通的计数器。
想象一下,你在坐过山车,哇,那个速度真是飞起!这时候,加速度计就开始忙活了。
它能测量你设备的加速、减速,甚至是静止状态。
要是你一不小心把手机掉到地上,加速度计马上就会告诉它:“喂,快点紧急刹车!”就像老司机一样,掌控着整个局面。
你知道吗?这东西可不是凭空冒出来的,它的原理简直像魔法一样。
说到工作原理,这就有意思了。
陀螺仪利用一个快速旋转的转子,那个转子就是它的“心脏”。
转子在旋转的时候,它的转轴会保持一个固定的方向。
想象一下,转子像个勇敢的骑士,无论周围怎么变化,它都坚持自己的立场。
这就让陀螺仪能保持方向感,不管你在什么地方。
就是这股坚持,让它在飞行器、航海等领域大展拳脚,真是神奇的玩意儿!而加速度计则是通过一种叫做“质量块”的小部件来工作的。
它就像一个小小的“游泳健将”,在加速或减速的时候,质量块会向不同的方向移动。
这个移动的过程被传感器捕捉到,结果就变成了你手机里那些好玩又神奇的运动数据。
你可以把它想象成一个在跳舞的小人儿,随着节奏变化,不断地在不同方向上舞动。
这种简单而又灵活的设计,让加速度计在智能手表、健身追踪器等设备中广泛应用。
说真的,这两者在一起,就像是一对完美的搭档,缺一不可。
陀螺仪提供方向,加速度计提供位置,它们互相配合,就能让你的手机、无人机、甚至是汽车都能在复杂的环境中保持稳定。
每次你在开车的时候,车上的陀螺仪和加速度计都在“忙活”。
陀螺仪和加速度的讲解详解

图2 光束切断式速度测量
v L NT
相关法
相关法检测线速度,是利用随机过程互相关函数 的方法进行的,其原理如图3所示。被测物体以速 度V行进,在靠近行进物体处安装两个相距L相同 的传感器(如光电传感器、超声波传感器等)。 传感器检测易于从被测物体上检测到的参量(如表 面粗糙度、表面缺陷等),例如对被测物体发射 光,由于被测物表面的差异及传感器等受随机因 素的影响.传感器得到的反射光信号是经随机噪 声调制过的。图中传感器2得到的信号x(t)是由 于物体A点进入传感器2的检测区得到的。当物体 A点运动到传感器1的检测区.得到信号y(t)。 当随机过程是平稳随机过程时,y(t)的波形和x(t) 是相似的,只是时间上推迟了t0(=L/v),即
皮托管测速法
V2,p2
V1,p1 z1
z2
流体伯努力方程:
(Benoulli’s Equation)
1.potential energy: mgz1, mgz2
Permass: gz1, gz2
2. Kinetic energy:
1 2
mv12
Permass:
1 2
v12
1 2
v22
3.pressure energy:
的距离或者从物体移动一定距离所需的时间求得,
这种方法只能求某段距离或时间的平均速度。越
越小,越接近瞬时速度。
(1) 相关法;
v s t
(2) 空间滤波器法
2. 角速度和线速度的相互转化。
v r
3. 利用物理参数测量:多普勒效应、流体力学定 律、电磁感应原理
4. 加速度积分法和位移微分法
光束切断法
多普勒测速仪应用实例
1、卫星跟踪测轨系统
MEMS加速度计(accelerometer)与陀螺仪的(gyroscope)原理介绍
MEMS加速度計
• 加速度計是一種慣性傳感器,主要功用為測量物 體速度變化率,一般經常被用來測量距離及衝擊 力。
• 在微機電(MEMS)技術製造的加速度計,使尺寸 大大縮小,故具有體積小、重量輕、可靠度高、 低功率等優點。
• 目前最廣泛的應用在車用電子領域(high g & low g),近年來已有趨勢大量朝著Game 和手機的應 用。
• 陀螺儀又名角速度計,利用內部振動機械結構感測物體轉動所產生角速度, 進而計算出物體移動的角度。
• 兩者看起來很接近,不過加速度計只能偵測物體的移動行為,並不具備精確 偵測物體角度改變的能力,陀螺儀可以偵測物體水平改變的狀態,但無法計 算物體移動的激烈程度。
• 用簡單的例子就是Eee Stick 體感遙控器,這是一個類似 Wii 遊戲的遙控捍 , 例如玩平衡木遊戲,當搖桿向前傾斜時,陀螺儀用來計算搖桿傾斜的角度, 三軸加速度計可以偵測搖桿晃動的劇烈程度以及搖桿是否持續朝斜下方。
基本ቤተ መጻሕፍቲ ባይዱ用原理
• v = ω ×r • ω=2π/T • ω=n ×2π • a=v^2/r
=w^2 ×r =ω ×v ×r • F=ma
線速度=角速度×半徑 角速度=圓周/周期 角速度=轉速×圓周率 向心加速度=線速度平方/半徑
=角速度平方×半徑 =角速度×線速度×半徑 向心力=質量×向心加速度
MEMS陀螺儀結構
基本應用原理
• F:物體所受合外力 • m:物體質量 • a:物體的加速度
• k:物質的彈性係數 • x:位移量
• C:電容量 • ε:介電常數 • A:極板截面積 • d:板間距離
MEMS加速度計原理
物體的加速度=物質的彈性係數X位移量/物體質量
加速度计陀螺仪

加速度计:测量物体运动产生的加速度。
加速度使得机械悬臂与两个电极之间的距离发生变化,从而改变了两个电容。
再通过电压输出,电压与加速度成正比。
车体发生倾斜的时候,在与车体垂直的方向上,会有重力加速度g 的分量。
所以测出加速度也就知道了小车的倾角。
但是车子移动的过程中会产生抖动而影响实际需要的重力加速度的分量值。
把原本应该是平滑的曲线,变成为在此平滑曲线上下变化的不规则的曲线。
所以可以将加速度计安装的低一些,这样做会减少距车轴的距离而使运动震动产生的误差减到最小。
在此基础上,可以使用滤波的方法,但滤波的方法可能会使原本的波形信息产生影响。
陀螺仪:测量角度的信息(角速度、倾斜角度)。
陀螺仪输出的是车的角速度(准确无误),经过积分可以得到倾角。
在获得倾角的过程中,如果角速度有微小的误差,在积分后,就会有较大的误差。
解决方案是通过上面的加速度传感器获得的角度信息对此进行校正。
通过对比积分所得到的角度与重力加速度所得到的角度,使用它们之间的偏差改变陀螺仪的输出,减小误差。
[()]d g g T θθθωθ=-÷+⎰准
g θ为加速度计获得的角度信息、θ为陀螺仪角速度积分后的角度、ω为陀螺仪输出的角速度。
g T 为一个参数在调试阶段需要调节。
加速度计测量加速度,陀螺仪测量角速度以及倾角。
陀螺仪的误差可以用加速度计的测量值来消减。
加速度计和陀螺仪传感器原理检测及应用
加速度计和陀螺仪传感器原理检测及应用加速度计的原理是基于质量的惯性。
它包含一个质量块,当物体受到加速度时,质量块会受到力的作用,从而产生位移。
位移可以通过电容、压电或压阻等方式检测。
根据牛顿第二定律F=ma,可以通过测量质量块上的力来计算出加速度。
陀螺仪的原理是基于转子的旋转。
转子在其轴向上旋转时,会受到科里奥利力的作用,导致转子发生位移。
位移可以通过电容、压电或压阻等方式检测。
根据角动量守恒定律L=Iω,可以通过测量转子上的力矩和惯性矩来计算出角速度。
在使用加速度计和陀螺仪进行检测时,需要注意其精度和误差。
加速度计的误差包括基线误差(如零偏误差和灵敏度误差)和非线性误差。
陀螺仪的误差包括漂移误差和振动误差。
针对这些误差,可以通过校准、信号处理和滤波等手段进行补偿和消除。
加速度计和陀螺仪的应用非常广泛。
加速度计可以用于物体的运动检测与测量,例如汽车碰撞检测、地震检测、体育运动分析等。
陀螺仪可以用于物体的姿态估计与控制,例如飞行器姿态控制、虚拟现实头显的运动跟踪等。
同时,加速度计和陀螺仪也常常结合使用,以提供更精确的运动状态信息。
总之,加速度计和陀螺仪是两种常用的传感器,用于测量物体的加速度和角速度。
它们的原理基于质量的惯性和转子的旋转,通过检测位移来计算出加速度和角速度。
在应用中,需要注意其精度和误差,并根据具体需求进行校准和补偿。
加速度计和陀螺仪在各种领域都有广泛的应用,如车辆安全、地震监测和虚拟现实等。
加速度计和陀螺仪的工作原理

加速度计和陀螺仪的工作原理1. 开场白嘿,朋友们!今天咱们来聊聊一些很酷的东西——加速度计和陀螺仪。
你们知道吗?这两小家伙就像是现代科技中的超级英雄,总是在默默无闻地工作,却又帮我们解决了无数难题。
想想看,手机、飞机、汽车,甚至是你的游戏控制器,里面都有它们的身影呢。
说到这里,你估计得问了,加速度计和陀螺仪到底是啥?别着急,今天咱们就从头开始,一步步揭开它们的神秘面纱。
2. 加速度计的神奇之处2.1 什么是加速度计?首先,加速度计这家伙听起来就很复杂,但实际上,它就是用来测量物体加速的一个超简单的小仪器。
想象一下,你开车的时候,突然踩油门,那时候车子就开始加速,对吧?加速度计就能感知到这种变化,告诉你车子加速了多少。
就像一个特别敏锐的侦探,专门捕捉“一点一滴”的变化。
2.2 加速度计的工作原理那么,加速度计到底是怎么工作的呢?其实,它的原理很简单。
通常,它里面有一些质量块,稍微一加速,这些小家伙就会向反方向移动。
因为根据物理学的惯性定律,物体总是喜欢保持原来的状态。
当它们移动时,加速度计就会记录下这个变化,最终用它的数据来计算出你车子的加速情况。
就好比你在一栋老房子里,墙上的画斜了一点,你的第一反应就是“这幅画怎么了?”只要给它一个小推力,它就会反应过来!3. 陀螺仪的奥秘3.1 什么是陀螺仪?接下来,咱们再聊聊陀螺仪。
这家伙听起来更高大上,但其实同样是个“守护者”。
它主要用来测量旋转和角速度,像是一个永远不昏睡的警卫。
有了它,你可以知道自己手机的屏幕是不是因为你转身就变成了横屏,真是太实用了,别说,年轻人玩手机可是非常讲究的呀!3.2 陀螺仪的工作原理那么,陀螺仪又是如何把旋转和角速度监控得那么严密的呢?这里面又有“戏”了。
通常,陀螺仪里会有一个转动的轮子,它在高速旋转。
想想那种转火旋风的感觉,哇!然后,只要它的旋转方向发生变化,陀螺仪就能感知到。
这就跟你们玩陀螺似的,越转越快,一旦力量改变,它的方向也会立马反馈回去。
陀螺仪”和“加速度计”工作原理
陀螺仪”和“加速度计”工作原理2016-09-17 16:14:40作者:没有夏天的四叶草修改:小马hoty 时间:2016/1/10最近看到加速度计和陀螺仪比较火,而且也有很多人都在研究。
于是也在网上淘了一个mpu6050模块,想用来做自平衡小车。
可是使用起来就发愁了。
网上关于mpu6050的资料的确不少,但是大家都是互相抄袭,然后贴出一段程序,看完之后还是不知道所以然。
经过翻阅各个方面的资料,以及自己的研究在处理mpu6050数据方面有一些心得,在这里和大家分享一下。
1、加速度和陀螺仪原理当然,在开始之前至少要弄懂什么是加速度计,什么是陀螺仪吧,否则那后边讲的都是没有意义的。
简单的说,加速度计主要是测量物体运动的加速度,陀螺仪主要测量物体转动的角速度。
这些理论的知识我就不多说了,都可以在网上查到。
这里推荐一篇讲的比较详细的文章《AGuide To using IMU (Accelerometer and Gyroscope Devices) inEmbeddedApplications》,在网上可以直接搜索到。
2、加速度测量在开始之前,不知大家是否还记得加速度具有合成定理?如果不记得可以先大概了解一下,其实简单的举个例子来说就是重力加速度可以理解成是由x,y,z三个方向的加速度共同作用的结果。
反过来说就是重力加速度可以分解成x,y,z三个方向的加速度。
加速度计可以测量某一时刻x,y,z三个方向的加速度值。
而自平衡小车利用加速度计测出重力加速度在x,y,z轴的分量,然后利用各个方向的分量与重力加速度的比值来计算出小车大致的倾角。
其实在自平衡小车上非静止的时候,加速度计测出的结果并不是非常精确。
因为大家在高中物理的时候都学过,物体时刻都会受到地球的万有引力作用产生一个向下的重力加速度,而小车在动态时,受电机的作用肯定有一个前进或者后退方向的作用力,而加速度计测出的结果是,重力加速度与小车运动加速度合成得到一个总的加速度在三个方向上的分量。
加速度计和陀螺仪传感器:原理、检测及应用

加速度计和陀螺仪传感器:原理、检测及应用
引言
微机电系统(MEMS)将机械和电子元件集成在微米级的小型结构中。
利
用微机械加工将所有电气器件、传感器和机械元件集成至一片共用的硅基片,
从而由半导体和微加工技术组合而成。
MEMS 系统的主要元件是机械单元、检测电路以及ASIC 或微控制器。
本文简要介绍MEMS 加速度计传感器和陀螺仪,讨论其工作原理、检测结构以及目前市场的热点应用,对我们日常生活具有深
远的影响。
1 MEMS 惯性传感器
MEMS 传感器在许多应用中测量沿一个或多个轴向的线性加速度,或者环绕一个或多个轴的角速度,以作为输入控制系统(2 加速度计工作原理根据牛顿第二定律,物理加速度(m/s2)与受到的合力(N)成正比,与其质
量(kg)成反比,加速度方向与合力相同。
值得注意的是,加速度计的作用力检测单元捕获产生加速的力。
所以,
加速度计实际测量的是力,而不是加速度;基本上是通过测量施加在加速度计其中一个轴向的作用力间接测量加速度。
加速度计也是一种机电装置,包括孔、空腔、弹簧和管道,机械加工采
用微加工技术。
加速度计采用多层晶圆工艺,通过检测物体重心相对于固定电
极的位移测量加速力。
3 加速度计的检测单元
加速度计常见的检测方法是电容检测,其中加速度与运动产生的电容变
化相关(εr= 电极板之间的材料的相对介电常数
A = 电极板之间的重叠面积。
手机传感器工作原理
手机传感器工作原理
手机传感器是一种集成电路,使用不同的物理原理来感知和测量手机周围环境的变化,并将这些变化转化为电信号或数字信号,以便供手机进行处理。
常见的手机传感器包括加速度计、陀螺仪、磁力计、光传感器、接近传感器、指南针、温度传感器等。
下面是几种常见的手机传感器工作原理:
1. 加速度计:基于微机电系统(MEMS)技术,使用微小的弹簧和质量块来测量手机在三个轴上的加速度。
当手机发生加速度变化时,质量块会移动,导致弹簧产生电信号,手机通过处理这些信号来检测和测量加速度变化。
2. 陀螺仪:同样基于MEMS技术,陀螺仪利用旋转质量块的
角动量守恒原理来测量手机绕三个轴旋转的速度和方向。
当手机发生旋转时,质量块会感受到由于角动量变化而产生的力矩,并将其转化为电信号。
3. 磁力计:利用霍尔效应原理,磁力计测量手机周围磁场的变化。
当手机接近磁场时,磁力计中的霍尔元件会感受到磁场的影响,导致输出电压发生变化。
通过测量输出电压的变化,手机可以检测和测量周围磁场的变化。
4. 光传感器:利用光敏电阻或光敏二极管来感知周围光照强度的变化。
当光照强度变化时,光传感器会产生相应的电信号,
手机通过测量这些电信号的变化来检测和测量光照强度的变化。
5. 接近传感器:利用红外线反射原理或超声波原理来测量物体与手机之间的距离。
当物体靠近传感器时,红外线或超声波会被物体反射回传感器,手机通过测量返回的红外线或超声波的强度或时间延迟来判断物体的距离。
这些手机传感器通过将物理变化转化为电信号,手机可以根据这些信号来判断手机周围环境的变化,并实现一系列功能,如屏幕旋转、步数统计、环境亮度调节等。
imu传感器工作原理
imu传感器工作原理IMU(Inertial Measurement Unit),即惯性测量单元,是一种测量物体运动状态的传感器。
它主要由加速度计和陀螺仪两部分组成,其中加速度计用于测量物体的加速度,而陀螺仪则用于测量物体的角速度。
IMU适用于需要超高精度、实时性和大范围度量运动状态等领域,如惯导导航、飞行器控制、导弹制导、机器人定位等。
一、加速度计的工作原理加速度计是一种用于测量物体三维运动状态的传感器。
它的工作原理基于牛顿定律和热力学原理。
当物体受到力的作用时,它会产生加速度,而加速度计可以通过测量这个加速度来判断物体的运动状态。
通常,加速度计会采用霍尔效应、压电效应、微机械系统(MEMS)等技术进行制造。
以MEMS型号的加速度计为例,它是由微机械系统芯片和信号处理器组成的。
微机械系统芯片中包含了多个微小的质量块和弹簧,当物体受到加速度作用时,这些小的质量块会对芯片的结构造成微弱的位移,这个位移会被芯片上的传感电极检测到,然后送到信号处理器中进行计算,最终得出物体的加速度值和方向。
二、陀螺仪的工作原理三、IMU的工作原理IMU通过加速度计和陀螺仪的数据融合,可以获取物体的三维运动状态信息。
具体来说,当物体发生加速度时,加速度计可以测量出物体的加速度,并可以通过积分算法得出物体的速度和位移信息。
而当物体发生旋转时,陀螺仪可以测量出物体的角速度和旋转角度,进而可以推算出物体的方向和变形信息。
IMU的精度受到多种因素的影响,如器件本身的精度、单位安装中的偏差和校准等。
因此,在实际应用中,IMU需要进行精确的校准和误差补偿,在实现高精度度量的基础上,才能提高传感器的性能和可靠度。
加速度计and陀螺仪原理
MEMS加速度计原理技术成熟的MEMS加速度计分为三种:压电式、容感式、热感式。
压电式MEMS加速度计运用的是压电效应,在其内部有一个刚体支撑的质量块,有运动的情况下质量块会产生压力,刚体产生应变,把加速度转变成电信号输出。
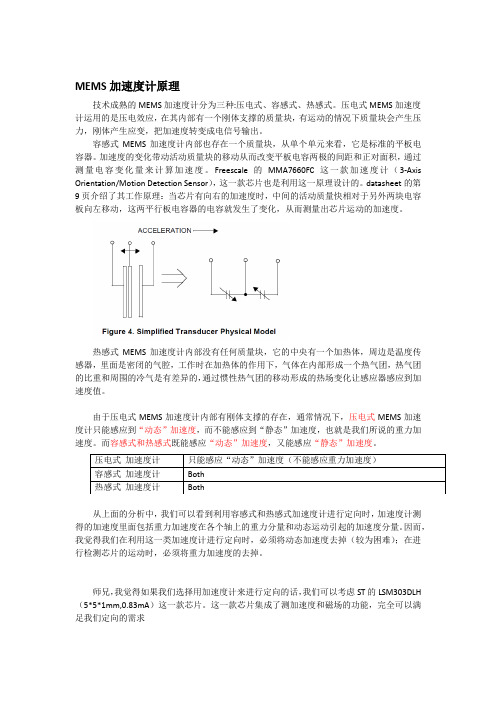
容感式MEMS加速度计内部也存在一个质量块,从单个单元来看,它是标准的平板电容器。
加速度的变化带动活动质量块的移动从而改变平板电容两极的间距和正对面积,通过测量电容变化量来计算加速度。
Freescale的MMA7660FC这一款加速度计(3-Axis Orientation/MotionDetection Sensor),这一款芯片也是利用这一原理设计的。
datasheet的第9页介绍了其工作原理:当芯片有向右的加速度时,中间的活动质量快相对于另外两块电容板向左移动,这两平行板电容器的电容就发生了变化,从而测量出芯片运动的加速度。
热感式MEMS加速度计内部没有任何质量块,它的中央有一个加热体,周边是温度传感器,里面是密闭的气腔,工作时在加热体的作用下,气体在内部形成一个热气团,热气团的比重和周围的冷气是有差异的,通过惯性热气团的移动形成的热场变化让感应器感应到加速度值。
由于压电式MEMS加速度计内部有刚体支撑的存在,通常情况下,压电式MEMS加速度计只能感应到“动态”加速度,而不能感应到“静态”加速度,也就是我们所说的重力加速度。
而容感式和热感式既能感应“动态”加速度,又能感应“静态”加速度。
从上面的分析中,我们可以看到利用容感式和热感式加速度计进行定向时,加速度计测得的加速度里面包括重力加速度在各个轴上的重力分量和动态运动引起的加速度分量。
因而,我觉得我们在利用这一类加速度计进行定向时,必须将动态加速度去掉(较为困难);在进行检测芯片的运动时,必须将重力加速度的去掉。
师兄,我觉得如果我们选择用加速度计来进行定向的话,我们可以考虑ST的LSM303DLH (5*5*1mm,0.83mA)这一款芯片。
3轴陀螺仪传感器和3轴加速度传感器的工作原理

3轴陀螺仪传感器和3轴加速度传感器的工作原理三轴陀螺仪传感器和三轴加速度传感器是常见的惯性传感器,能够检测物体的角速度和加速度。
它们在许多领域如航空航天、导航、智能手机等中得到广泛应用。
本文将详细介绍三轴陀螺仪传感器和三轴加速度传感器的工作原理。
一、三轴陀螺仪传感器三轴陀螺仪传感器通过检测物体的角速度来测量物体的旋转运动。
其工作原理基于陀螺效应,即旋转物体在无外力作用时会有一个稳定的自转轴。
陀螺仪传感器利用了这个原理来检测自转轴的方向和角速度。
三轴陀螺仪传感器通常由三个相互垂直的敏感轴组成,分别为X轴、Y轴和Z轴。
每个轴上都包含一个陀螺仪传感器,用于测量相应轴的角速度。
在传感器内部,通常使用MEMS(微电子机械系统)技术构建微小的马达(如振荡陀螺仪)或者利用光学原理(如光纤陀螺仪)来测量角速度。
以MEMS陀螺仪传感器为例,其工作原理如下:在传感器中的微小马达内部有一个旋转的转子。
当传感器发生旋转时,转子会受到陀螺效应的影响,使得转子的旋转轴相对于固定结构发生偏转。
这个转子的偏转量被测量并转换成相应的电压信号。
通过测量在不同轴上的偏转量,可以得到物体在三个轴上的角速度。
二、三轴加速度传感器三轴加速度传感器用来测量物体在三个轴方向上的加速度。
其工作原理基于牛顿第二定律,即物体所受的合力等于物体的质量乘以加速度。
三轴加速度传感器通常由三个相互垂直的敏感轴组成,分别为X轴、Y轴和Z轴。
每个轴上都包含一个加速度传感器,用于测量相应轴的加速度。
在传感器内部,通常使用微机电系统(Micro Electro-Mechanical System,MEMS)技术来构建微小的质量块(如微型弹簧质量块)或者利用电容变化原理来测量加速度。
以MEMS加速度传感器为例,其工作原理如下:在传感器内部有一个微小的振动质量块,其相对于传感器壳体可以自由移动。
当传感器受到加速度时,质量块会受到惯性力的作用而发生位移。
这个位移会导致传感器内部的一些物理量(如电容)发生变化。
单反相机平衡仪的工作原理
单反相机平衡仪的工作原理
单反相机平衡仪是一种用来稳定相机的设备,使摄影师能够更轻松地拍摄稳定的照片或视频。
它采用了陀螺仪和加速度计等传感器来实现平衡功能。
具体工作原理如下:
1. 陀螺仪:平衡仪中的陀螺仪可以感知到相机的倾斜角度和旋转角度。
当相机发生倾斜或旋转时,陀螺仪会检测到这些变化,并向平衡仪发送相应的信号。
2. 加速度计:平衡仪中的加速度计可以感知到相机的加速度和重力加速度方向。
它可以帮助平衡仪判断相机的位置和姿态,并根据需要进行调整。
3. 控制系统:平衡仪的控制系统可以根据陀螺仪和加速度计的信号来判断相机是否处于平衡状态。
如果相机失去平衡,控制系统会通过内置的电机和传动装置对相机进行调整,使其重新回到平衡位置。
4. 电池和电路:平衡仪依靠内置的电池供电,并通过电路将传感器收集到的信号进行处理和转换。
电路还可以将调整信号传送给电机,使其按照需要调整相机的位置。
通过陀螺仪和加速度计的传感器数据,平衡仪可以实时监测相机的姿态和位置,并通过调整相机的角度来保持相机的平衡。
这样,在拍摄时,摄影师可以更加轻松地移动相机,同时获得更稳定的图像或视频。
智能手机的陀螺仪与加速度计技术研究
智能手机的陀螺仪与加速度计技术研究智能手机已经成为我们日常生活中不可或缺的一部分。
平时我们用它来发送信息、浏览新闻、购物、娱乐等。
但是,我们是否真正了解智能手机的组成结构和所使用的技术?今天,我们来探讨一下智能手机中的两种技术:陀螺仪和加速度计。
一、陀螺仪技术陀螺仪是一种能够检测智能手机旋转运动的技术。
它类似于儿童们常玩的陀螺,能够在空间中保持自转,从而实现对旋转运动的感知。
陀螺仪技术的实现需要借助MEMS(微机电系统)技术。
这种技术可以将微小的机械组件集成到芯片上,使得智能手机的体积变得更加小巧。
陀螺仪由一根细而长的柱状陀螺和两个电极组成。
当智能手机发生旋转运动时,柱状陀螺会产生一种叫做科里奥利力的力,这个力会引起两个电极之间的压电效应,最终产生电信号。
陀螺仪技术的应用非常广泛。
首先,它可以用于检测智能手机的旋转方向,比如横屏和竖屏转换。
其次,它还可以用于导航和跟踪系统,并在无载体的情况下执行空间姿态控制。
二、加速度计技术加速度计是一种能够检测智能手机线性运动的技术。
它可以通过测量物体在不同时间段内的速度变化,来计算出物体的加速度。
加速度计同样基于MEMS技术。
它由许多能够在不同方向上弯曲的微小柔性悬臂组成。
当智能手机发生线性运动时,这些悬臂会因为惯性而发生微小的弯曲变化,从而产生电信号。
根据这些电信号,加速度计可以计算出物体的加速度和方向。
加速度计技术在智能手机中的应用非常重要。
首先,它可以用于智能手机的摇一摇功能。
其次,它还可用于检测智能手机的倾斜角度、运动轨迹和速度,从而实现更加精确的计步、定位和导航功能。
总结陀螺仪和加速度计是智能手机中两种非常重要的技术。
它们分别能够检测旋转运动和线性运动,并在智能手机的诸多应用中发挥重要作用。
虽然这些技术在智能手机中是微小的组成部分,但是它们的应用范围非常广泛,为我们的生活带来了很多便利。
mpu9050工作原理
mpu9050工作原理
MPU9050是一种集成了三轴陀螺仪、三轴加速度计和三轴磁力
计的传感器。
它的工作原理涉及到多个方面。
首先,让我们从陀螺仪的工作原理开始。
陀螺仪利用角动量守
恒定律,测量物体绕着自身旋转的角速度。
在MPU9050中,三轴陀
螺仪能够测量物体绕X、Y和Z轴的角速度变化,从而提供了物体的
旋转状态。
其次,加速度计的工作原理也很重要。
加速度计通过测量物体
在三个轴上的加速度来确定物体的运动状态。
MPU9050中的三轴加
速度计可以检测物体的加速度变化,从而可以用来确定物体的运动
状态和姿态。
最后,磁力计的工作原理也需要考虑进来。
磁力计可以测量地
球磁场在三个轴上的分量,从而可以确定物体相对于地球的方向。
MPU9050中的三轴磁力计可以提供物体在三维空间中的方向信息。
综上所述,MPU9050的工作原理涉及到利用陀螺仪测量角速度、加速度计测量加速度以及磁力计测量磁场信息,从而提供了物体的
运动状态和方向信息。
这些信息对于许多应用领域,如惯性导航、运动追踪和姿态控制等都具有重要意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陀螺仪”和“加速度计”工作原理2016-09-17 16:14:40
作者:没有夏天的四叶草修改:小马hoty 时间:2016/1/10
最近看到加速度计和陀螺仪比较火,而且也有很多人都在研究。
于是也在网上淘了一个mpu6050模块,想用来做自平衡小车。
可是使用起来就发愁了。
网上关于mpu6050的资料的确不少,但是大家都是互相抄袭,然后贴出一段程序,看完之后还是不知道所以然。
经过翻阅各个方面的资料,以及自己的研究在处理mpu6050数据方面有一些心得,在这里和大家分享一下。
1、加速度和陀螺仪原理
当然,在开始之前至少要弄懂什么是加速度计,什么是陀螺仪吧,否则那后边讲的都是没有意义的。
简单的说,加速度计主要是测量物体运动的加速度,陀螺仪主要测量物体转动的角速度。
这些理论的知识我就不多说了,都可以在网上查到。
这里推荐一篇讲的比较详细的文章《AGuide To using IMU (Accelerometer and Gyroscope Devices) inEmbeddedApplications》,在网上可以直接搜索到。
2、加速度测量
在开始之前,不知大家是否还记得加速度具有合成定理?如果不记得可以先大概了解一下,其实简单的举个例子来说就是重力加速度可以理解成是由x,y,z三个方向的加速度共同作用的结果。
反过来说就是重力加速度可以分解成x,y,z三个方向的加速度。
加速度计可以测量某一时刻x,y,z三个方向的加速度值。
而自平衡小车利用加速度计测出重力加速度在x,y,z轴的分量,然后利用各个方向的分量与重力加速度的比值来计算出小车大致的倾角。
其实在自平衡小车上非静止的时候,加速度计测出的结果并不是非常精确。
因为大家在高中物理的时候都学过,物体时刻都会受到地球的万有引力作用产生一个向下的重力加速度,而小车在动态时,受电机的作用肯定有一个前进或者后退方向的作用力,而加速度计测出的结果是,重力加速度与小车运动加速度合成得到一个总的加速度在三个方向上的分量。
不过我们暂时不考虑电机作用产生的运动加速度对测量结果的影响。
因为我们要先把复杂的事情分解成一个个简单的事情来分析,这样才能看到成果,才会有信心继续。
下边我们就开始分析从加速度得到角度的方法。
如下图,把加速度计平放,分别画出xyz轴的方向。
这三个轴就是我们后边分析所要用到的坐标系。
如图一
图一
把mpu6050安装在自平衡车上时也是这样的水平安装在小车底盘上的,假设两个车轮安装时车轴和y轴在一条直线上。
那么小车摆动时,参考水平面就是桌面,并且车轴(y轴)与桌面始终是平行的,小车摆动和移动过程中y轴与桌面的夹角是不会发生变化的,一直是0度。
发生变化的是x轴与桌面的夹角以及z轴与桌面的夹角,而且桌面与x轴z轴夹角变化度数是一样的。
所以我们只需要计算出x轴和z轴中任意一个轴的夹角就可以反映出小车的倾斜的情况了。
如图二。