自动化实验-倒立摆实验-附仿真结果图复习课程
自动化实验-倒立摆实验-附仿真结果图
一、直线一级倒立摆的仿真(一)直线一级倒立摆的数学建模对于倒立摆系统,由于其本身是自不稳定的系统,实验建模存在一定的困难。
但是忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程。
下面我们采用其中的牛顿-欧拉方法和拉格朗日方法分别建立直线型一级倒立摆系统的数学模型.图2 直线一级倒立摆模型φ摆杆与垂直向上方向的夹角;θ摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)。
图3 小车及摆杆受力分析分析小车水平方向所受的合力,可以得到以下方程:由摆杆水平方向的受力进行分析可以得到下面等式:把这个等式代入式1中,就得到系统的第一个运动方程:为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:力矩平衡方程如下:注意:此方程中力矩的方向,由于θ=π+φ,cosφ= −cosθ,sinφ= −sin θ,故等式前面有负号。
合并这两个方程,约去P 和N,得到第二个运动方程:设θ=π+φ(φ是摆杆与垂直向上方向之间的夹角),假设φ与1(单位是弧度)相比很小,即φ<〈1,则可以进行近似处理:。
用u 来代表被控对象的输入力F,线性化后两个运动方程如下:对式9进行拉普拉斯变换,得到注意:推导传递函数时假设初始条件为0。
由于输出为角度φ,求解方程组的第一个方程,可以得到:或如果令v = x,则有:把上式代入方程组的第二个方程,得到:整理后得到传递函数:其中设系统状态空间方程为:方程组对解代数方程,得到解如下:整理后得到系统状态空间方程:设则有:实际系统的模型参数如下:M 小车质量1。
096 Kgm 摆杆质量0.109 Kgb 小车摩擦系数0 。
1N/m/secl 摆杆转动轴心到杆质心的长度0。
2 5mI 摆杆惯量0。
0034 kg*m*m把上述参数代入,可以得到系统的实际模型。
摆杆角度和小车位移的传递函数:摆杆角度和小车加速度之间的传递函数为:摆杆角度和小车所受外界作用力的传递函数:以外界作用力作为输入的系统状态方程:(二)倒立摆的PID调节:经典控制理论的研究对象主要是单输入单输出的系统,控制器设计时一般需要有关被控对象的较精确模型。
(完整)倒立摆实验报告
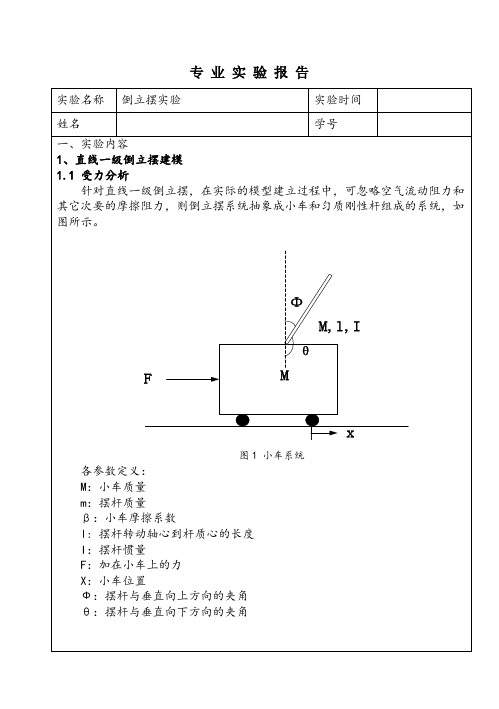
专业实验报告摆杆受力和力矩分析θmg VH θX V X H图2 摆杆系统摆杆水平方向受力为:H 摆杆竖直方向受力为:V 由摆杆力矩平衡得方程:cos sin Hl Vl I φφθθπφθφ⎧-=⎪=-⎨⎪=-⎩(1) 代入V 、H ,得到摆杆运动方程。
当0φ→时,cos 1θ=,sin φθ=-,线性化运动方程:2()I ml mgl mlx θθ+-=1.2 传递函数模型以小车加速度为输入、摆杆角度为输出,令,进行拉普拉斯变换得到传递函数:22()()mlG s ml I s mgl=+- (2) 倒立摆系统参数值:M=1.096 % 小车质量 ,kg m=0.109 % 摆杆质量 ,kg0.1β= % 小车摩擦系数g=9.8 % 重力加速度,l=0.25 % 摆杆转动轴心到杆质心的长度,m I= 0.0034 % 摆杆转动惯量,以小车加速度为输入、摆杆角度为输出时,倒立摆系统的传递函数模型为:20.02725()0.01021250.26705G s s =- (3) 1.3 倒立摆系统状态空间模型以小车加速度为输入,摆杆角度、小车位移为输出,选取状态变量:(,,,)x x x θθ= (4)由2()I ml mgl mlx θθ+-=得出状态空间模型001001000000001330044x x x x x g g lμθθθθ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥'==+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦(5) μθθθ'⎥⎦⎤⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=0001000001 xx x y (6) 由倒立摆的参数计算出其状态空间模型表达式:(7)010000001000100029.403x x x x x μθθθθ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥'==+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦(8)00x μθθ⎤⎥⎡⎤⎥'+⎢⎥⎥⎣⎦⎥⎥⎦作用)增大,系统响应快,对提高稳态精度有益,但过大易作用)对改善动态性能和抑制超调有利,但过强,即校正装Ax B Cx μ+= 1n x ⎥⎥⎥⎦,1n x x x ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,1111n n nn a A a a ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ , 1n B b ⎥⎥⎥⎦,]n C c =。
自动控制实验报告——球杆系统 倒立摆 bupt
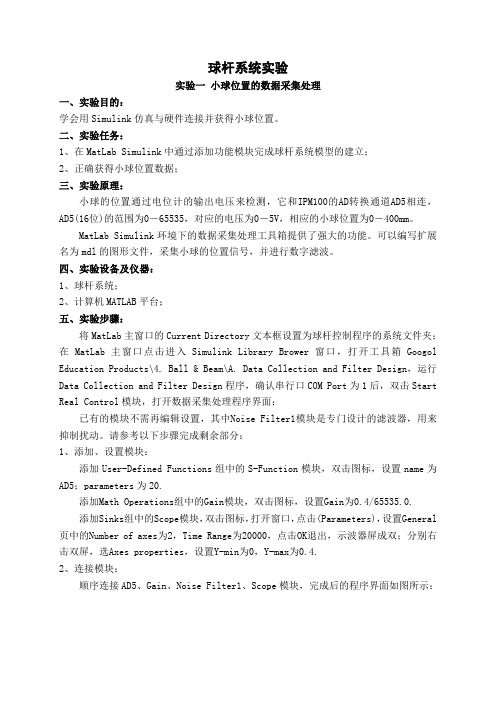
球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
倒立摆仿真及实验报告
最优控制实验报告二零一五年一月目录第1章一级倒立摆实验 (3)1.1 一级倒立摆动力学建模 (3)1.1.1 一级倒立摆非线性模型建立 (3)1.1.2 一级倒立摆线性模型建立 (3)1.2 一级倒立摆t∞状态调节器仿真 (3)1.3 一级倒立摆t∞状态调节器实验 (3)1.4 一级倒立摆t∞输出调节器仿真 (3)1.5 一级倒立摆t∞输出调节器实验 (3)1.6 一级倒立摆非零给定调节器仿真 (3)1.7 一级倒立摆非零给定调节器实验 (3)第2章二级倒立摆实验 (3)2.1 二级倒立摆动力学模型 (3)2.1.1 二级倒立摆非线性模型建立 (3)2.1.2 二级倒立摆线性模型建立 (3)2.2 二级倒立摆t∞状态调节器仿真 (3)2.3 二级倒立摆t∞状态调节器实验 (3)2.4 二级倒立摆t∞输出调节器仿真 (3)2.5 二级倒立摆t∞输出调节器实验 (3)2.6 二级倒立摆非零给定调节器仿真 (3)2.7 二级倒立摆非零给定调节器实验 (3)第1章一级倒立摆实验1.1一级倒立摆动力学建模在忽略了空气阻力和各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如图所示图1-1 直线一级倒立摆模型M小车质量 1.096 kg;m 摆杆质量0.109 kg;b 小车摩擦系数0 .1N/m/sec;l 摆杆转动轴心到杆质心的长度0.25m;I 摆杆惯量0.0034 kg·m2;φ摆杆与垂直向上方向的夹角,规定角度逆时针方向为正;x 小车运动位移,规定向右为正。
1.1.1一级倒立摆非线性模型建立采用拉格朗日方法,系统的拉格朗日方程为:()()()=-(1.1),,,L q q T q q V q q其中,L 为拉格朗日算子,q 为系统的广义坐标,T 为系统的动能,V 为系统的势能。
拉格朗日方程由广义坐标i q 和L 表示为:i i id L Lf dt q q ∂∂-=∂∂ (1.2)i f 为系统沿该广义坐标方向上的外力,在本系统中,系统的两个广义坐标分别为φ和x 。
自动控制原理课程设计(倒立摆)
南京航空航天大学课程名称:自动化控制原理课程设计专业:探测制导与控制技术时间:2016.6.20-2016.6.25一、实验目的1、 学会用SIMULINK 软件分析复杂的控制系统。
2、 会用状态反馈进行控制系统设计。
3、 了解状态观测器的实现。
二、实验设备1、 计算机和打印机。
2、 实际倒立摆系统。
三、实验原理假设原系统的状态空间模型为BU AX X+= ,若系统是完全能控的,则引入状态反馈调节器KX R U -=这时,闭环系统的状态空间模型为⎩⎨⎧=+-=CXY BR X BK A X)(设计任务是要计算反馈K ,使A-BK 的特征值和期望的极点P 相同。
通过将倒立摆线性数学模型输入到MATLAB 中,使用K=place(A,B,P)函数算出反馈矩阵反馈增,K 和期望极点向量P 应与状态变量X 具有相同的维数。
本系统可令输入R=0,即只讨论初始值对系统的作用。
倒立摆系统模型如下:1、倒立摆线性模型:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=3444.16254.42122.822122.822760.07062.38751.168751.6510000100A ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=5125.62184.500B ⎥⎦⎤⎢⎣⎡=00100001C ⎥⎦⎤⎢⎣⎡=00D 2、倒立摆非线性模型:)(cos 00144.00061.0212001θθθ--+=⋅⋅B A2121121222)sin(2.1)cos(2.1sin 2.61⋅⋅⋅⋅⋅⋅⋅-----=θθθθθθθθθθ其中:⋅⋅---++=11212110]0168.0)cos()sin(00144.0[sin 2979.00236.0θθθθθθθu A 2221212210])sin()[cos(0012.0sin )cos(0734.0⋅⋅---+--=θθθθθθθθθB四、实验内容1、根据给出的倒立摆的线性数学模型,讨论系统的稳定性,可控性和可观性。
现代控制理论大作业-倒立摆模型建立与仿真(深圳大学)

深圳大学实验报告课程名称:现代控制理论实验项目名称:倒立摆模型建立与仿真学院:机电与控制工程学院专业:自动化指导教师:***报告学号:班级:实验时间:实验报告提交时间:教务部制一、 实验目的(1)实验一:增强状态空间表达式的理解和应用,通过直线型一级倒立摆系统的具体对象,展现非线性系统线性化的应用和特点,提高仿真计算和应用Matlab 进行系统分析的能力,并为后续章节的有关系统稳定性提供感性认识。
(2)实验二:了解采用状态反馈改善系统性能的方法,应用状态反馈方法配置直线型一级倒立摆系统的极点,设计控制器,并在倒立摆系统实验平台上实现一级倒立摆系统稳定运行。
二、 实验任务与要求(1)实验一建立倒立摆的非线性状态空间表达式; 建立倒立摆的线性状态空间表达式;在两种模型下,在matlab simulink 平台上通过仿真计算给出摆角和直线位移的运动曲线,位移的初始为零,摆角的初始值分别选取如下:20πθ≤, 20πθ≥, πθ=0(2)实验二针对一级倒立摆系统,对于给定的动态性能指标(调节时间小于3秒,阻尼比0.5)确定闭环极点(参考值,32,32,10,10j j --+---),设计系统状态反馈阵的参数; 在倒立摆系统平台上完成极点配置控制实验。
实验要保持倒立状态,当系统受到扰动后仍保持稳定。
记录控制结果曲线,并进行讨论。
重新选择一组(或多组)期望的闭环极点,设计系统状态反馈阵的参数,在倒立摆系统平台上完成极点配置控制实验,记录控制结果曲线,并和第二条的实验结果进行比较分析。
三、 实验原理(1)实验参见固高《倒立摆与自动控制原理实验》(2)若受控系统(A,B)完全能控,则通过状态反馈可以任意配置闭环极点。
实验设计原理参见固高《倒立摆与自动控制原理实验》第82-89页 。
四、 实验步骤及过程(1) 非线性状态方程系统方程:1/(M+m )=0.82988;1/(I+ml^2)=97.91922;m*g*l=0.26705;m*l=0.02725 将系统模型参数代入,可得以下仿真下载后图片可放大X 和φ输出的响应曲线(红为x ,黄为φ) 当20πθ≤,取40πθ=当20πθ≥,取430πθ=当πθ=0(2)线性状态方程可以看出,在单位阶跃响应作用下,小车位置和摆杆角度都是发散的。
自动控制实验报告——球杆系统-倒立摆-bupt概要

球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
自动控制实验报告——球杆系统倒立摆bupt概要
球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、直线一级倒立摆的仿真(一)直线一级倒立摆的数学建模对于倒立摆系统,由于其本身是自不稳定的系统,实验建模存在一定的困难。
但是忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程。
下面我们采用其中的牛顿-欧拉方法和拉格朗日方法分别建立直线型一级倒立摆系统的数学模型。
图2 直线一级倒立摆模型φ摆杆与垂直向上方向的夹角;θ摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)。
图3 小车及摆杆受力分析分析小车水平方向所受的合力,可以得到以下方程:由摆杆水平方向的受力进行分析可以得到下面等式:把这个等式代入式1中,就得到系统的第一个运动方程:为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:力矩平衡方程如下:注意:此方程中力矩的方向,由于θ=π+φ,cosφ= −cosθ,sinφ= −sinθ,故等式前面有负号。
合并这两个方程,约去P 和N,得到第二个运动方程:设θ=π+φ(φ是摆杆与垂直向上方向之间的夹角),假设φ与1(单位是弧度)相比很小,即φ<<1,则可以进行近似处理:。
用u 来代表被控对象的输入力F,线性化后两个运动方程如下:对式9进行拉普拉斯变换,得到注意:推导传递函数时假设初始条件为0。
由于输出为角度φ,求解方程组的第一个方程,可以得到:或如果令v = x,则有:把上式代入方程组的第二个方程,得到:整理后得到传递函数:其中设系统状态空间方程为:方程组对解代数方程,得到解如下:整理后得到系统状态空间方程:设则有:实际系统的模型参数如下:M 小车质量 1.096 Kgm 摆杆质量0.109 Kgb 小车摩擦系数0 .1N/m/secl 摆杆转动轴心到杆质心的长度0.2 5mI 摆杆惯量0.0034 kg*m*m 把上述参数代入,可以得到系统的实际模型。
摆杆角度和小车位移的传递函数:摆杆角度和小车加速度之间的传递函数为:摆杆角度和小车所受外界作用力的传递函数:以外界作用力作为输入的系统状态方程:(二)倒立摆的PID调节:经典控制理论的研究对象主要是单输入单输出的系统,控制器设计时一般需要有关被控对象的较精确模型。
PID控制器因其结构简单,容易调节,且不需要对系统建立精确的模型,在控制上应用较广。
首先,对于倒立摆系统输出量为摆杆的角度,它的平衡位置为垂直向上的情况。
系统控制结构框图如下:图1 直线一级倒立摆闭环系统结构框图图中KD(s)是控制器传递函数, G(s)是被控对象传递函数。
考虑到输入r(s)=0,结构图可以很容易的变换成:图2 直线一级倒立摆闭环系统结构框图该系统的输出为:()()()1()()()()()G s num denPID F S KD S G S denPID den num numPID =++ 其中 num ——被控对象传递函数的分子项den ——被控对象传递函数的分母项numPID ——PID 控制器传递函数的分子项denPID ——PID 控制器传递函数的分母项通过分析上式就可以得到系统的各项性能。
摆杆角度和小车加速度的传递函数:22()()()s ml V S I ml s mglϕ=+- PID 控制器的传递函数为:()()()()I D p K num PID KD s K s s K S den PID =++= 需仔细调节PID 控制器的参数,以得到满意的控制效果。
小车位置输出为:2()()X s V s s =通过对控制量v 双重积分即可以得到小车位置。
由实际系统的物理模型:2()0.02725()0.01021250.26705s V s s ϕ=- (三) simulink 仿真在Simulink 中建立如图所示的直线一级倒立摆模型:其中Scope 中的图像为位移的响应曲线,Scope1为角度的响应曲线。
PID参数的调节:首先确定比例环节,不考虑微分环节和积分环节,分别取三组数据p 9;0;0I DK K K===,p 20;0;0I DK K K===,p 40;0;0I DK K K===,仿真结果如下:图(1)p 9;0;0I DK K K===图(2)p 20;0;0I DK K K===图(3)p 40;0;0I DK K K===图(1)的图像不收敛,是由于比例调节系数取得不得当,随着比例系数pK 的增大,从图中可以看出,闭环控制系统持续振荡,周期约为0.7s。
为消除系统的振荡,增加微分控制参数DK。
下面探讨DK环节对系统响应的影响,分别取p 40;0;1I DK K K===,p 40;0;5I DK K K===,p 40;0;10I DK K K===,p 40;0;20I DK K K===,仿真响应结果如下图:图(1)p =40==1I DK K K;0;图(2)p 40;0;5I DK K K===图(3)p 40;0;10I DK K K===图(4)p 40;0;20I DK K K===图(1),p 40;0;1I DK K K===,系统稳定时间过长,大约为4秒,且在两个振荡周期后才能稳定,因此再增加微分控制参数DK,图(2)的超调明显减少,而到了图(3),基本没有是渐进稳定的,但是无论怎么调节,都存在稳态误差,因此,加入积分环节IK。
为了探讨积分环节的作用,去以下三组数据,p 40;5;10I DK K K===,p 40;10;10I DK K K===,p 40;20;10I DK K K===,仿真结果如下:图(1)p 40;5;10I DK K K===图(2)p 40;10;10I DK K K===图(3)p 40;20;10I DK K K===由上图可以看出,从上面仿真结果可以看出,系统可以较好的稳定,但由于积分因素的影响,稳定时间明显增大。
可以从Scope1看出,由于PID控制器为单输入单输出系统,所以只能控制摆杆的角度,并不能控制小车的位置,所以小车会往一个方向运动。
二、 直线一级顺摆建模和实验(一) 直线一级顺摆的数学建模直线一级倒立摆的摆杆在没有外力作用下,会保持静止下垂的状态,当受到外力作用后,摆杆的运动状态和钟摆类似,如果不存在摩擦力的作用,摆杆将持续摆动,很多情况下,我们并不希望出现这种持续振荡的情况,例如吊车在吊动物体的时候,我们希望物体能过很快地停止到指定的位置。
下面我们对直线一级顺摆进行建模分析,并对其进行仿真和控制。
同直线一级倒立摆的物理模型相似,可以采用牛顿力学和拉格朗日方法进行建模和分析,对于牛顿力学方法,这里不再进行分析和计算,读者可以参考直线一级倒立摆的物理模型对其进行建模,下面采用拉格朗日方法对直线一级顺摆进行建模。
和直线一级倒立摆相似,直线一级顺摆也可以进行根轨迹校正实验、频率响应校正实验和状态空间极点配置实验,以上实验请参照直线一级倒立摆的相关实验和直线一级顺摆的 PID 控制实验进行,对于直线一级顺摆,我们只进行 PID 控制实验和LQR 控制实验。
图1 ,顺摆物理模型摆杆角度和小车位移的传递函数:22()3()29.4s s V s s ϕ-=+ 摆杆角度和小车加速度之间的传递函数为:22()3()29.4s s V s s ϕ-=+ 因此以小车加速度作为输入的系统状态方程:和一级倒立摆相同,系统的状态完全可控性矩阵的秩等于系统的状态维数,系统的输出完全可控性矩阵的秩等于系统输出向量y数,所以系统可控,因此可以对系统进行控制器的设计,使系统稳定。
(二)倒立摆的PID调节Simulink的PID仿真:首先确定比例环节,不考虑微分环节和积分环节,分别取三组数据p 10;0;0I DK K K=-==,p 20;0;0I DK K K=-==,p 40;0;0I DK K K=-==,图像依次如下:可以看出,在P控制器作用下,系统呈现等幅振荡,需要给系统增加微分控制,设置PID参数为:p 40;0;5I DK K K=-==-,p 40;0;10I DK K K=-==-,p 40;0;20I DK K K=-==-图像如下:有图可以看出,随着微分系数DK的减小,稳定时间延长,振荡减缓,但是始终存在稳态误差,因此,加入积分环节IK。
分别取以下值,以确定积分系数,p 40;5;10I DK K K=-=-=-,p 40;10;10I DK K K=-=-=-,p 40;20;10I DK K K=-=-=-仿真图像如下:从图中可以看出,稳态误差已经基本消除了。
三、倒立摆PID控制器仿真结果通过单一变量变化法对P,I,D每个参数的参数进行了研究,得出结论如下:1.比例调节器(P):采用P调节器要选择合适的比例带参数。
比例带参数小时,系统已发生振荡且稳态误差减小;参数大时,动态偏差和稳态误差增大,但稳定性提高。
2.比例积分环节(PI):PI调节器兼顾了比例调节器和积分调节器的作用,其既具有比例调节器的快速稳定特点,保证了调节过程不会出现过分振荡;又具有积分调节器没有稳态误差的优点。
3.比例微分调节器(PD):增加微分环节后,可起到超前调节作用,一旦偏差e出现变化趋势,即可发挥调节作用,故可以减少调节过程中被调量得动态偏差,同时减小了调节过程中的振荡倾向。
4.比例积分微分调节器(PID):PID兼顾了以上三种调节器的优点,既能靠积分作用消除被调量的静态误差,有能靠微分环节改善动态过程的品质。
调节的参数有三个,只要调节得当,就会出现非常好的效果,但过程较复杂,一般用于多惯性对象系统。
在仿真时,参数的选择既有优点,也有缺点,因此更重要的是根据实际的情况,在实践的基础上对参数进行修正。