RIEGL三维激光扫描仪培训新教程
Riegl 三维扫描仪培训教程

图标列表说明: (3)一. 扫描仪与电脑IP获取连接 (7)1.1本地连接ip设置 (7)1.2新建工程ip更改 (9)二.相机参数调整 (12)2.1查找反射片 (12)2.2删除错误点 (13)2.3反射片二次扫描 (15)2.4添加点进行连接 (16)2.5生成 new mounting (18)2.6导出相机参数 (21)三.外业数据采集 (24)3.1新建工程 (24)3.2建立扫描站 (24)3.3其他参数记录 (25)四.内业数据处理 (26)4.1站点拼接: (26)4.2点云赋色 (33)4.3删除杂点数据(过滤噪点) (34)4.4点云矢量化处理 (34)4.5建立平面 (35)4.6删除冗余点数据 (37)4.7建立三角网模型 (39)4.8计算体积 (43)4.9生成等高线 (46)4.10建立正射影像图 (47)图标列表说明:创建新的对象创建新的项目创建新的扫描点位置创建新的扫描获取新的图片(照相)获取新的视角打开项目文件删除打印编辑当前对象的属性在窗口器中显示对象结束所有当前运行作业打开项目管理器(project manager)打开对象监督器(object inspector)打开联测点列表打开数据读取窗口打开主题列表打开信息列表水平展示窗口垂直展示窗口串联展示窗口上一个窗口下一个窗口连接扫描仪线路状态连接照相机线路状态间隔网络连接检查选择模式矩形选择多线选择三角形选择自由选择模式标记选择区域切换选择区域取消标记选择区域内部过滤器外部过滤器线过滤器正面背面选择单个三角形选择所有三角形选择部分线段元素选择整条线段选择面元素模式反选取消创建等高线移动选择的线段删除选择区域删除选择区域并建立……隐藏选择区域只显示选择区域显示所有三角选择的区域标准(平面)三角测量极面三角测量平滑、降低数据修改法线三角形法线翻转正面背面基本设置查看选择模式保存图像(相机)建立新的多线对象建立新的点对象建立新的边缘建立新的球面对象用中心点和半径的模式用中心点到表面点的模式用2个表面点的模式建立新的面状对象建立截面对象建立新的联测点一.扫描仪与电脑IP获取连接扫描开始前需要确保扫描仪与其搭配的笔记本电脑已连接上。
Riegl三维激光扫描仪简单入门操作过程
下面我简单介绍一下Rigel VZ-400三维激光扫描仪的扫描过程(入门级)1) 选择合适的站点架设仪器,将扫描仪,相机,计算机,电源等各部分连接好,仪器对中,将四个配准反光片架设到合适的位置。
打开RISCAN PRO软件。
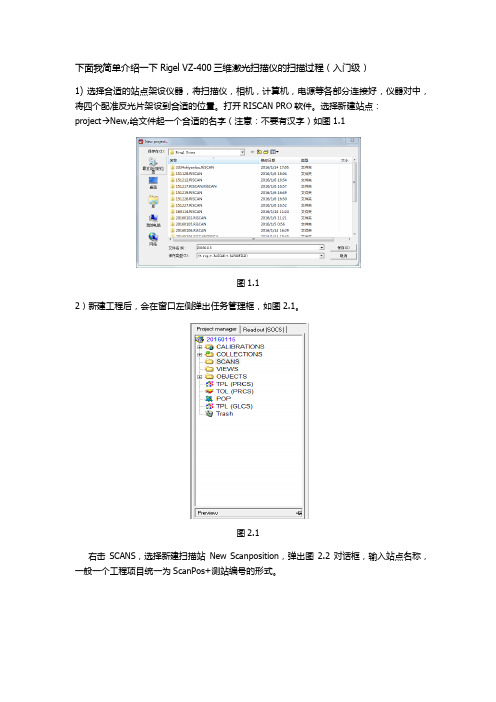
选择新建站点:project New,给文件起一个合适的名字(注意:不要有汉字)如图1.1图1.12)新建工程后,会在窗口左侧弹出任务管理框,如图2.1。
图2.1右击SCANS,选择新建扫描站New Scanposition,弹出图2.2对话框,输入站点名称,一般一个工程项目统一为ScanPos+测站编号的形式。
图2.2点击OK,则在SCANS文件目录下,建立新的扫描站点文件,如图2.3图2.33)右键单击新建的ScanPos001站点,选择New single scan,弹出对话框图3.1图3.1单击Panorama(全景扫描),设置全景扫描参数,将Resolution[deg]分辨率改为合适的数值。
(校园三维模型建设我们用的是0.1的分辨率,我觉得这里跟点云的采集频率有关,直接影响采集数据量的大小),改为0.1后,点击右边”=”,此时Est.time估计扫描时间为1’26’’在右下角勾选Image acquisition,这样在全景扫描完后,相机会自动拍摄相片。
设置完成后,点击OK,弹出configuration扫描仪当前配置框,点击OK,扫描仪开始工作,进行全景扫描。
图3.24)全景扫描和影像获取结束后,就要开始对四个反光片进行精扫。
右击扫完后新生成的点云文件,例如图4.1中的160101_170812形式的文件。
图4.1选择Find reflectors,寻找反射片。
如图4.2图4.2在name prefix出更改合适的名称前缀,点击OK 。
图4.2之后点击Arrange windows vertically图标,将窗口按列排列,如图4.3图4.3将右侧2D视图最大化,点击Show/hide all tie points ,选择Show TPL SOCS显示反光片.视图中除安置的四个反光片之外的强反射处都是多余的,要删除这些多余的强反光处,才可以进行反光片精扫工作。
Riegl设备操作拼接数据入门(Z或V系列适用)

Riegle设备操作规范及其配套软件的使用目录第一部分激光数据的采集第二部分数据预处理(激光数据的拼接,公共点和全站仪测量标靶法)第一部分激光数据的采集一、激光数据的采集前的准备1. 采点:确定扫描站2. 粘贴反射体如果扫描站相对较少,可以采用公共反射体的方式进行拼接;否则确定一个坐标系,采用全站仪测点坐标进行拼接。
如果采用公共反射体的方式,要注意公共反射体粘贴的角度与方位。
不论采用何种方法,应该让反射体分布均匀。
分布均匀包括2个层面的意义:一是四面八方尽量均匀;二是高低错落有致。
每个扫描站的有效发射体最低3个,建议每站的反射体6~8个。
反射体的数目对扫描工作量影响极小;对数据拼接工作量的影响可以忽略不计。
二、地面三维激光扫描系统操作流程每天开始新的扫描,一般按照如下步骤进行:1.修改IP2.新建文件3.添加相机文件4.新的mounting5.新的扫描6.找出反射体7.调试相机参数8.采集数码相片9.重新mounting10.精确扫描11.照片获取12.把激光点云赋色如果变换扫描站,只要相机重新安装,则按照上面的步骤5--12进行;如果相机没有重新安装,以上的步骤可以精简为5-6,10-12;其中步骤12可以作为内业部分去完成。
1.修改IP如下2.新建文件在弹出的对话框中,选择保存的目录和文件名“test”3.添加相机文件右击“test”目录下的“calibration”,在弹出的对话框中选择“new camera calibration(blank)”在弹出的“new camera calibration”对话框中选择“import”,弹出“import from project…”,根据已经知道的相机参数的位置,选中该参数,单击打开。
在新弹出的对话框中,选择“calibration_gei_14mm”,单击OK“new camera calibration”的对话框如下,单击OK4.新的mounting右击mounting,选中“new mounting”弹出“new mounting calibration”对话框,单击“import…”打开相机参数所在的位置并选中该参数,单击“打开”此时matrix的信息已经导入新的参数,单击OK5.新的扫描右击scan,选中“new scanposition”在弹出的对话框中,输入扫描站的名称,单击OK右击刚刚新建的扫描站,选择“new single scan…”在弹出的对话框中,首先选中,然后单击“overview”,单击“calulate”,单击OK弹出目前扫描的相关信息对话框,单击OK,扫描开始下图是扫描过程中截图6.找出反射体扫描结束后,右击“BeamWidening ”,选中“Find reflectors”弹出如下对话框,一般按照缺省的参数,直接单击OK过了几秒钟,已经找到的反射体就弹出如下:最小化该窗口,打开窗口在快捷菜单中,点击,在弹出的对话框中,选择“show tpl socs”自动找到的反射体位置就在图中标出,选中实际存在的反射体如下图,选中的为红色,未选中的为兰色双际“TPL(SOCS)”打开刚才最小化的窗口选中的反射体已经被自动选中单击反选按钮,直接按删除键,弹出如下对话框单击YES单击,对反射体进行精确扫描。
RIEGL VZ-1000 三维激光扫描成像系统 说明书

LASER MEASUREMENT SYSTEMS®Preliminary DatasheetRIEGL VZ-1000®三维激光扫描成像系统拥有RIEGL 独一无二的全波形回波技术(waveform digitization)和实时全波形数字化处理和分析技术(on-line waveform analysis),每秒可发射高达300,000点的纤细激光束,提供高达0.0005°的角分辨率。
这种高精度高速激光测距及可同时探测到多重乃至无穷多重目标的细节信息技术优势,是传统单次回波反映单一物体技术所无法比拟的。
除此以外,基于RIEGL 独特的多棱镜快速旋转扫描技术,它能够产生完全线性、均匀分布、单一方向、完全平行的扫描激光点云线。
的高质量制作水准和密封等级使它能够在恶劣的环境条件下完成高难度的测量分析任务。
具有轻便、坚固耐用等显著优点,其安装和操作也极其简单:通过自带的控制面板即可设置参数,控制扫描,无需携带笔记本电脑,并可使用iPhone 或PDA 进行远距离的遥控操作,将全部数据都储存在设备附带的存储卡中。
操作模式:●无需笔记本即可单机获取数据,并利用内置用户界面进行基本配置及输入命令。
●通过有线或无线网络端口,在笔记本上经由RiSCAN PRO 进行远程遥控操作。
●将命令提示整合到移动激光扫描系统中。
●提供连接后处理软件接口。
使用界面:●整合人机交互界面(HMI),在设备上进行单机操作。
●使用320x 240像素、3.5寸高分辨率TFT 彩色液晶显示屏,防刮防反射并配备多语言菜单。
●防水抗污键盘,按钮设计便于控制。
●通过扩音器可获取声音信号。
RIEGL VZ-1000VZ-1000VZ-1000长距离、高精度、快速度、轻巧便携的三维激光扫描成像系统 ●超高速数据采集●广阔的扫描视场角,可控性强●能够识别多重目标●在恶劣环境下卓越的测量能力●标配高精度数码相机安装底盘●集成倾角传感器和激光铅锤●内置GPS 天线●多种端口(LAN,WLAN,USB 2.0)●设备本身具备内部数据存储能力●超长距离,高达1400米●建筑和正射影像测量●建立考古和文化遗产档案●隧道测量●土木工程应用及工程监测●城市三维建模●数字城市建模和车载激光扫描成像系统●地形和矿产测量系统构成软件包用于扫描仪的操作和数据处理数据存档:以目录树结构存储为XML 文件格式核查,智能视图和特征抽取拼接方式:提供包括全球坐标系拼接在内的全自动和半自动四种拼接方式高精度、低畸变的专业单反数码相机(4,256×2,832pixel)(4,288x 2,848pixel) ●自动生成高分辨率的贴图纹理网格●自动生成三维正射影像、数字高程图和等高曲线图●实时定位、距离、面积和体积的测量将扫描仪、软件和数码相机结合,能够实现Ø 200 mm308 m m3Preliminary Datasheet扫描仪通讯和数据接口●LAN 10/100/1000MBit/s 接口位于旋转头里●LAN 10/100MBit/s 接口位于底部●WLAN 接口位于顶部天线处●USB 2.0用于外部驱动存储(闪存●USB 2.0用于连接数码相机●GPS 天线连接器●两个用于额外电源供给的接口●GPS 脉冲同步接口(1PPS 扫描数据存储●内置32G 闪存存储●外部有USB 2.0存储驱动接口(可接/RIEGL VZ -1000®2)Laser PRR (Peak) 70 kHz100 kHz 150 kHz 300 kHz2)Effective Measurement Rate 29 000 meas./sec.42 000 meas./sec.62 000 meas./sec.122 000 meas./sec.3)Max. Measurement Range 4)for natural targets ρ ≥ 90%1200 m 1000 m 800 m 450 m for natural targets ρ ≥ 20%560 m470 m380 m270 m5)Max. Number of Targets per Pulse practically unlimited 6) 8)Accuracy 8 mm 7) 8)Precision 5 mmCLASS 1 LASER PRODUCT1)with online waveform processing4)limited by PRR 2)rounded values, selectable by measurement program 5)details on request3)Typical values for average conditions. Maximum range is 6)Accuracy is the degree of conformity of a measured quantity to its actual (true) value.specified for flat targets with size in excess of the laser7)Precision, also called reproducibility or repeatability, is the degree to beam diameter, perpendicular angle of incidence, and for which further measurements show the same result.atmospheric visibility of 23 km. In bright sunlight, 8)One sigma @ 100 m range under RIEGL test conditions.the max. range is shorter than under an overcast sky.9)0.3 mrad correspond to 30 mm increase of beamwidth per 100 m of range.Minimum Range 1.5 mLaser Wavelength near infrared 9)Beam Divergence 0.3 mrad10) frame scan can be disabled, providing 2D operation11) selectable, minimum stepwidth increasing to 0.004° @ 70 kHz PRRLASER MEASUREMENT SYSTEMS®0100200400500800Target Reflectivity [%]M a x i m u m M e a s u r e m e n t R a n g e [m ]w e t i c e , b l a c k t a r p a p e rd r y s n o wc o n i f e r o u s t r e e sd r y a s p h a l td e c i d u o u s t r e e st e r r a c o t t ac l i f f s , s a nd , m a s o n r yw h i t e p l a s t e r w o r k , l i m e s t o n e30051015202530354045505560657075801400w h i t e m a r b l e9085standard clear atmosphere: visibility 23 km light haze: visibility 8 kmc o n s t r u c t i o n c o n c r e t e9001000110012001300600700150 kHz100 kHz70 kHzrange limited by PRR300 kHz技术参数物理参数激光产品分类一级安全激光制造依照IEC60825-1:2007The following clause applies for instruments delivered into the United States:Complies with 21CFR 1040.10and 1040.11except for deviations pursuant to Laser Notice No.50,dated Jul 26,2001.温度范围:0℃~40℃(使用);-10℃~50℃(存放)保护等级:IP64,防尘,防雨水重量:9.8KG1)Range Performance 100°(+60°~-40°)旋转反射棱镜3线/秒~120线/秒0.0024°≤∆ϑ≤0.288°优于0.0005°(1.8arcsec)内置,专门用于扫描仪垂直位置的变化定位实时同步扫描数据的采集时间控制扫描仪同步旋转0°~360°旋转激光头0°/秒~60°/秒0.0024°≤∆φ≤0.5°优于0.0005°(1.8arcsec)扫描角度范围扫描机制原理扫描速度角度步频率∆ϑ(垂直),∆φ(水平)角度分辨率倾角传感器:内置同步计时器:同步扫描(可选):11)11)10)假设具备以下条件:平面目标大于激光光束;入射角垂直于目标且亮度平均。
RIEGL三维激光扫描仪培训新教程
RIEGL 三维扫描仪地形图培训教程一.相机参数调整1。
点击project-new新建一个扫描工程实例:2.右击左侧编辑栏的calibration,在弹出的方框中,选择第二项,即new cemara calibration (wirard):3.在新的对话框中,可以选定客户仪器自配置相机型号、配置镜头型号。
点击OK。
点击next,得到下一步设置相机镜头型号:点击next,得到下一步设置相机和镜头的序列号,可用x代替:点击OK,此时会在左侧编辑框中的calibration-camera二级菜单中出现新的相机参数图框:4.右击左侧编辑框的mounting菜单,选择new mounting选项。
这时,会出现新的安装图标:5。
在左侧编辑框中右击scnas,建立新的扫描站和扫描工程:。
在弹出的对话框中的instrument选项选择仪器型号;右击扫描站,在弹出的新对话框中,选中distance 前面的方框(表示在10m的距离处的扫描点间隔),start angle和stop angle设定起始角.点击OK。
此时将得到扫描数据视图:6.点击左侧编辑框中的扫描数据图标,在出现的方框中选择find reflectors。
在弹出的新对话框中threshold detection设定反射率.并且把delete existing tiepoints of tiepointlist前面的方框选中。
此时将会出现以下界面:7。
双击扫描数据的图标,选择在出现的对话框中选择2D显示模式:8。
在新打开的二维视图中点击按钮,在下拉框中选择第一项,show TPL SOCS:此时,二维视图将出现仪器扫描点的坐标:如果有地物的反射率较高,可能会造成干扰点,此时在二维视图中,按住shift键,点鼠标选中,此点将变为红色:同时,在TPL的列表中将出现对应的该点的属性:此时,可直接点击按钮,删除该干扰点。
9。
点击按钮,将选中TPL列表中的所有数据,再点击按钮,仪器将定位扫描TPL列表中的点位。
三维扫描仪培训手册
三维扫描仪培训手册目的本培训手册旨在向使用三维扫描仪的人员提供必要的知识和技能,以确保他们能够正确操作和维护设备。
通过本手册的研究,您将掌握三维扫描仪的基本操作方法和常见故障的排除方法。
适用对象本培训手册适用于企业员工、技术人员或其他需要使用三维扫描仪的人员。
培训内容1. 三维扫描仪的基本原理- 三维扫描仪的工作原理- 如何选择合适的扫描仪型号2. 设备的安装和设置- 三维扫描仪的安装步骤- 连接设备和电源- 验证设备的连接和功能- 设置扫描参数和扫描范围3. 扫描操作步骤- 准备工作和环境要求- 样品准备和固定技巧- 扫描操作步骤说明- 解决常见扫描问题的方法4. 数据处理和结果分析- 扫描数据的导出和保存- 数据分析软件的使用- 结果的解读和分析5. 设备维护和保养- 设备的日常清洁和维护- 常见故障排除和维修方法- 定期保养和检查的注意事项培训方式本培训可以通过面对面的教学方式进行,也可以使用在线培训平台进行远程教学。
培训期间,学员将进行理论研究和实践操作,以确保他们全面掌握所学知识。
培训考核培训结束后,学员将进行考核,以评估他们掌握三维扫描仪操作和维护的程度。
考核内容包括理论知识考试和实际操作能力测试。
培训证书通过本培训并且经过考核合格的学员将获得由我们颁发的三维扫描仪培训证书,证书将作为学员在使用三维扫描仪方面的资质证明。
联系方式如需更多信息或者报名参加培训,请联系我们的培训部门:- 联系人:XXX- XXX- 邮箱:XXX免责声明本培训手册的内容仅供参考,我们对使用此手册中提及的任何设备或操作所导致的问题不承担任何责任。
在使用三维扫描仪之前,请确保已经完全阅读并理解设备的用户手册和安全操作规程。
三维激光扫描仪的使用教程及效果展示

三维激光扫描仪的使用教程及效果展示现如今,随着科技的不断进步与发展,我们生活的方方面面都得益于现代科技的蓬勃发展。
其中,三维激光扫描仪作为一种先进的测量工具,正在被广泛应用于各行业中。
本文将为您详细介绍三维激光扫描仪的使用教程,并通过实际案例展示其出色的效果。
一、三维激光扫描仪简介三维激光扫描仪是一种使用激光测距原理进行三维信息采集与处理的仪器。
它通过发射激光束来扫描物体表面,通过接收激光反射回来的信号来测量物体的位置与形状,从而实现对物体的全方位测量与重建。
相比传统的测量工具,三维激光扫描仪具有测量速度快、精度高、操作简便等优势,被广泛应用于建筑、工程、制造、文化遗产保护等领域。
二、三维激光扫描仪的使用教程1. 准备工作在使用三维激光扫描仪之前,首先需要进行一些准备工作。
确保仪器处于正常工作状态,检查扫描仪的设备连接,确保电源充足,以便正常进行扫描操作。
另外,还需选择合适的扫描场景与扫描模式,根据实际需求确定扫描范围与精度。
2. 扫描操作开始扫描之前,我们需要将三维激光扫描仪放置在固定位置,并确保其稳定。
接着,在扫描软件中设置扫描参数,例如分辨率、角度等。
然后,根据扫描仪的指示,将激光束对准目标物体进行扫描。
在扫描过程中,需保持稳定的手持,保持扫描过程的连贯性和准确性。
3. 数据处理与重建一旦扫描完成,我们可以将扫描的数据导入到计算机中进行进一步处理与重建。
主要的数据处理步骤包括点云配准、深度图像处理、三维模型生成等。
通过配准技术,可以将多次扫描的数据进行对齐,形成一个完整的三维模型。
根据实际需求,可以对三维模型进行编辑、修复、优化等操作,以得到更加精确的模型。
三、三维激光扫描仪的效果展示随着三维激光扫描仪的普及与应用,其出色的效果也逐渐展现出来。
下面将通过几个实际案例展示三维激光扫描仪的应用效果。
1. 建筑测量与设计三维激光扫描仪可以快速准确地获取建筑物的外部结构与内部空间信息,方便进行建筑测量与设计。
RIEGL VZ-400,3D扫描仪软件培训

一、叠加照片1、打开工程文件project.rsp2、将ScanPos003目录下的ScanPos003_001和ScanPos003_002拖动到同一个窗口显示,选择“3D”模式,采用True color下的Linear scaled;3、右键点击ScanPos003_001 →点击Color from images…会自动选择已有的相对应照片→点击OK,在目录上会生成一个Color_ScanPos003_ScanPos001文件,然后打开此文件,显示贴片效果如下图二、反射片拼接1、初始化:双击转换矩阵SOP,右键单击数字框,初始化矩阵“Set default”右键单击ScanPos003,将Registered的勾去掉2、关联大地坐标:双击总目录的TPL(GLCS),在弹出的窗口点击Import tiepointlis…选择导入的坐标点数据,右键点击Copy tiepointlist to…下的TPL PRCS,是数据复制到TPL(PRCS)3、反射片拼接:双击打开ScanPos003目录下的TPL(SOCS),点击Find corresponding points…然后在打开的窗口中修改参数,精度Tolerance[m]:0.1,最小反射片数Minimum N:3 ,然后点击Start,下一步OK双击ScanPos004的TPL(SOCS),点击Find corresponding points…,同时勾选ScanPos003,修改参数后点击Start,最后点击OK,至此反射片拼接完成,效果如下图:4、坐标拼接——五羊雕塑1)打开project.rsp2)初始化:双击POP,在打开的数字框按右键,点击Set default;然后双击ScanPos001、ScanPos002、ScanPos003、ScanPos004的SOP,在打开的数字框右键点击Set default。
3)双击TPL(GLCS),先删除遗留数据,然后点击Import tiepointlist导入坐标点文件,在弹出的对话框选择文件类型,选择“测量控制点坐标.csv”文件打开,在弹出的对话框匹配对应好X、Y、Z坐标,点击OK,这样控制点坐标就被导入了工程4)双击ScanPos001的TPL(SOCS),在弹出的对话框点击“Find corresponding points…”,修改参数0.5、3,点击Start →OK,将ScanPos001拼接到工程;5)同理处理ScanPos002、ScanPos003、ScanPos004,在拼接时同时勾选ScanPos001,将全部都拼接到ScanPos001,然后将4个反射片坐标拼接的效果显示如下图:三、后视拼站——矿山1、打开project.rsp2、双击POP,初始化“Set default”,3、双击TPL(GLCS),在弹出的对话框删除遗留的数据,然后点击,选择“GPS坐标.csv”打开,在弹出的对话框匹配对应好X、Y、Z坐标,点击OK,这样后视控制点坐标就导入了工程里面;4、右击ScanPos001下的SOP,选择“Backsighting orientation…”,在弹出的对话框中的Instrument height[m]输入仪器高1.7,点击Use GLCS tiepoint,选择c1,点击OK →next点击Use GLCS tiepoint,选择h1,点击OK →next点击“Use tiepoint [finescanned]”,再点击“Select tiepoint”,选择反射片“SOCS_001”,点击OK点击next →Set SOP →Cancel →Close5、同理处理ScanPos002、ScanPos003,分别选择c2、h2和c3、h3,仪器高均为1.7,反射片分辨是SOCS_046和SOCS_1161,最后显示效果图:四、手动拼站——操作视频071、打开project.rsp2、双击打开SCANS目录下ScanPos01的Color_ScanPos01-panorama和ScanPos02的Color_ScanPos02-panorama,True Color显示,然后点击Arrange windows vertically,双屏显示两个窗口;3、点击Registration →Coarse registration,在弹出的对话框中点击View A的选项框,然后点击01窗口的图上,定义View A;同理定义View B(02)4、在01上找到第一个匹配点,按住shift,点击第一个点,在02找到相同位置的点,同样按住shift 点击,然后点击对话框的“Add point pair”,在对话框显示生成第一个匹配点。
三维激光扫描仪工作流程.
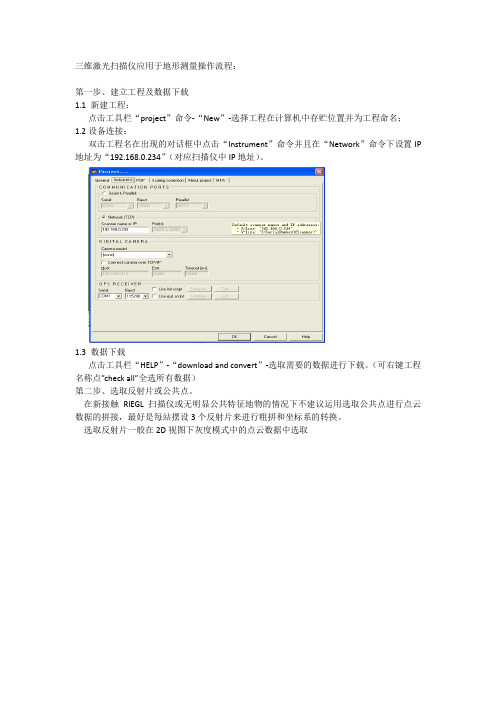
三维激光扫描仪应用于地形测量操作流程:第一步、建立工程及数据下载1.1 新建工程:点击工具栏“project”命令-“New”-选择工程在计算机中存贮位置并为工程命名;1.2设备连接:双击工程名在出现的对话框中点击“Instrument”命令并且在“Network”命令下设置IP 地址为“192.168.0.234”(对应扫描仪中IP地址)。
1.3 数据下载点击工具栏“HELP”-“download and convert”-选取需要的数据进行下载。
(可右键工程名称点”check all”全选所有数据)第二步、选取反射片或公共点。
在新接触RIEGL扫描仪或无明显公共特征地物的情况下不建议运用选取公共点进行点云数据的拼接,最好是每站摆设3个反射片来进行粗拼和坐标系的转换。
选取反射片一般在2D视图下灰度模式中的点云数据中选取且与选取的公共点区分开)在2D视图中选取反射片后,可在3D视图中拖入标记的反射片来检查标记的反射片位置是否正确,若发现反射片偏离,可在TPL中删除改点,在3D视图中重新选择。
第三步、导入外业实测反射片坐标(反射片坐标是用RTK测得)把外业RTK点(TXT格式或者CSV格式)导入TPL(GLCS)需要注意X6位Y7位;如果我们是用选取公共点进行站站之间的粗拼,或用反射片进行粗拼,可以在TPL(GLCS)中选取所有点右键,复制到TPL(PRCS)。
注意:一般我们在野外作业时都是用磁罗盘进行定向配合GPS进行数据扫描,内业一般就可以不用进行粗拼,第四步可以跳过,所以我们不用将TPL(GLCS)中的点复制到TPL(PRCS)中。
第四步、粗拼粗拼就是将站站之间的位置在一定的误差范围内重合。
粗拼有三种方法一、在野外作业时都是用磁罗盘进行定向配合GPS进行数据扫描,相对位置不会发生太大的变化,我们可以理解为已经粗拼完成。
某些个别站因为各种原因可能会发生相对位置变化很大的情况,我们可以通过改变某站扫描数据的X、Y、Z坐标进行粗拼。
Riegl_Scan-Pro使用要点
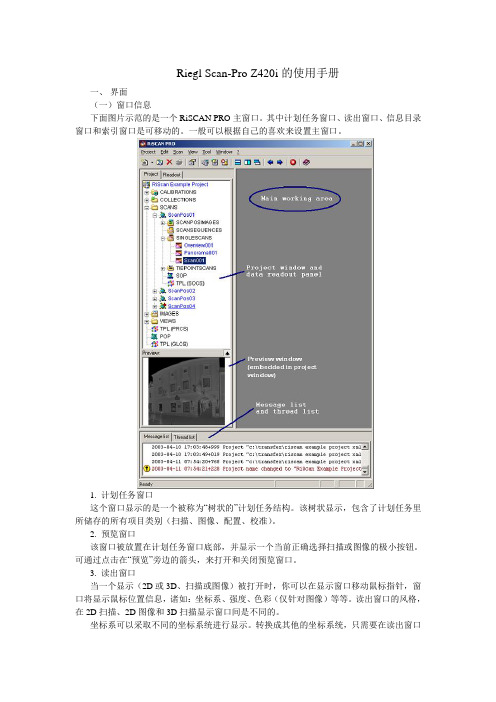
Riegl Scan-Pro Z420i的使用手册一、界面(一)窗口信息下面图片示范的是一个RiSCAN PRO主窗口。
其中计划任务窗口、读出窗口、信息目录窗口和索引窗口是可移动的。
一般可以根据自己的喜欢来设置主窗口。
1. 计划任务窗口这个窗口显示的是一个被称为“树状的”计划任务结构。
该树状显示,包含了计划任务里所储存的所有项目类别(扫描、图像、配置、校准)。
2. 预览窗口该窗口被放置在计划任务窗口底部,并显示一个当前正确选择扫描或图像的极小按钮。
可通过点击在“预览”旁边的箭头,来打开和关闭预览窗口。
3. 读出窗口当一个显示(2D或3D、扫描或图像)被打开时,你可以在显示窗口移动鼠标指针,窗口将显示鼠标位置信息,诸如:坐标系、强度、色彩(仅针对图像)等等。
读出窗口的风格,在2D扫描、2D图像和3D扫描显示窗口间是不同的。
坐标系可以采取不同的坐标系统进行显示。
转换成其他的坐标系统,只需要在读出窗口任意处点击右键,并在坐标系统菜单(SOCS、PRCS、GLCS)中选择一个。
对于不同的坐标系统,是可以采取多个读出窗口来进行显示。
所有这些读出窗口将显示同一点的坐标,在一个不同的坐标系统进行变换的将除外。
以下图片显示的是,在SOCS坐标系统中展示的一个2D扫描。
4. 信息目录窗口该窗口可显示来自RiSCAN PRO的所以信息。
这些信息和计划任务存储在一起,因此,你可以清楚的看到在这个计划任务中所进行的所有操作。
信息案例:加载计划任务,加载(只读)计划任务;保存计划任务;开始数据采集;结束数据采集;以及其他的诸如报警信息和错误信息。
5. 索引目录窗口这个窗口显示一个所有运行的索引清单(二)主菜单这是RiScan Pro的主菜单1. 计划任务菜单在这个菜单里,你可以加载、保存或关闭一个计划任务。
菜单中的“Abort”,用以终止当前运行的数据或图像采集。
通过子菜单中的“New”,以建立一个新的计划任务或创建计划任务中新的项目(扫描,显示,扫描位置,图像)。
三维激光扫描仪操作步骤【详解】

随着国内三维扫描仪技术的成熟及在各行各业的普及,三维扫描技术已成为生产制造中的一项重要技术支撑,起着不可或缺的作用,并逐渐形成一门新的科学。
如何正确高效的操作三维扫描仪成为了众多企业关心的问题。
使用同样一款三维扫描仪扫描同一物体时,不同的操作人员得到的数据结果度会有一定的差异,其原因便在于扫描人员在操作过程中所掌握的操作技巧。
掌握三维扫描仪操作原理比较容易,但如果想成为扫描专家还需要一定的学习与反复操作。
本文主要以拍照式三维扫描仪为例,简单叙述如何快速掌握三维光学扫描仪的操作方法:一、前期的准备工作(主要分三步)步骤1:确保稳定的三维扫描环境进行三维扫描首先须确保三维扫描仪是建立在一个稳定的环境中(包括光环境:避免强光和逆光对射;三维扫描仪的稳固性等),要限度地减少环境破坏,确保三维扫描结果不会受到外部因素的影响。
步骤2:三维扫描仪校准(需要学习)在三维扫描前,对机器进行校准尤为关键的一步。
三维扫描仪要知道自身在什么环境下进行扫描,才能扫描出准确的三维数据。
在校准过程中,要根据三维扫描仪预先设置的扫描模式,计算出扫描设备相对于对扫描对象的位置。
校准扫描仪时,应根据扫描对象调整设备系统设置的三维扫描环境。
正确的相机设置会影响扫描数据的准确性,因此必须确保曝光设置是正确的。
严格按照制造商的说明进行校准工作,仔细校正不准确的三维数据。
校准后,可通过用三维扫描仪扫描已知三维数据的测量物体来检查比对,如果发现扫描仪扫描的精度无法实现时,需要重新校准扫描仪。
步骤3 :对扫描物体表面进行处理有些物体表面扫描是比较困难的。
这些物体包括半透明材料(玻璃制品、玉石),有光泽,或颜色较暗的物体。
对于这些物体需要使用哑光白色显像剂覆盖被扫描物体表面,对扫描物体喷上薄薄的一层显像剂,目的是是为了更好的扫描出物体的三维特征,数据会更精确。
需要注意的是,显像剂喷洒过多,会造成物体厚度叠加,对扫描精度造成影响。
注:显像剂不会对物体表面及人体造成损害,扫描完成后用清水洗掉即可。
RIEGL三维激光扫描仪培训新教程

RIEGL三维激光扫描仪培训新教程RIEGL是一家致力于生产高精度激光测量设备的公司,其产品包括三维激光扫描仪、测距仪和航空激光雷达等。
作为用户端,在使用RIEGL三维激光扫描仪时,需要掌握一些基本的操作和技巧,本文将针对RIEGL三维激光扫描仪的使用提供新的培训教程。
仪器介绍RIEGL三维激光扫描仪是一种快速获取大量点云数据的传感器设备。
它可以快速地将三维物体的形状、面积和体积等信息转化为数字形式的数据。
该设备使用激光束扫描测量目标物体,并利用光电二极管(PD)接收反射光信号,从而测量出物体表面位置的数据。
扫描准备在使用RIEGL三维激光扫描仪之前,需要进行一些准备工作:1.进行场地勘测,确认要扫描的区域范围;2.准备好扫描笔记本电脑,确保其可以兼容使用RIEGL扫描软件;3.确认扫描区域的光照充足,以保证扫描精度;4.针对扫描区域的不同材质、颜色,调整设备的扫描参数。
数据采集进行数据采集的时候,应该按照以下步骤操作:1.选择扫描区域,进行扫描前的测量;2.打开RIEGL扫描软件,并进行设备的连接,确保设备正常工作;3.设置扫描参数,包括扫描时间、分辨率等;4.开始三维激光扫描,并以预定的路径、角度和时间完成数据采集。
针对复杂的扫描区域,不同的扫描参数和路径会影响到最后数据的质量。
因此,在数据采集过程中,需要根据实际情况及时调整扫描参数和路径。
数据处理完成数据采集后,需要进行数据处理,步骤如下:1.将采集到的点云数据导入RIEGL扫描软件中;2.对点云数据进行清理、筛选,去除噪点和无用数据;3.将点云数据转化为数字模型图形;4.对数据图形进行编辑和处理,包括平面分割、三维重建等。
在数据处理的过程中,需要注意的是:数据的清理和筛选是非常关键的,对于一些含噪点的数据,需要进行适当的处理,否则会影响到数据的质量。
数据应用RIEGL三维激光扫描仪由于其性能优越,已经被广泛应用于不同的领域,比如地质勘探、建筑设计、城市规划等。
三维扫描仪操作培训

2、掌握三维扫描仪的基本操作 方法
6. 按[确定]键。
2、掌握三维扫描仪的基本操作 方法
浏览 SD 卡中的数据
3.利用Scanmaster软件和T3D软 件进行数据处理
1.Scanmaster软件使用说明 1.1打开Scanmaster软件
1.2新建项目:点击表头“文件”选项,点击新建项目
3.利用Scanmaster软件和T3D软 件进行数据处理
1.6缩放(点击放大镜的位置) 1.7选择数据:点击全部选择 1.8点云处生成点云 1.9生成点云重新取样,生成点云2 2.0点云2导出
3.利用Scanmaster软件和T3D软 件进行数据处理
T3D软件使用说明: 1.主页 1.1.新建项目 点击“主页”选项卡中--“新建项目”,弹出新建项目对话框,输入项目名称,选 择文件路径,点“确定”新建项目。具体如下图:
2.2 输入断面参数 点击“线路参数”选项卡中的“断面参数”按钮,打开断面参数输入对话框。
3.利用Scanmaster软件和T3D软 件进行数据处理
3.利用Scanmaster软件和T3D软 件进行数据处理
3.利用Scanmaster软件和T3D软 件进行数据处理
3.利用Scanmaster软件和T3D软 件进行数据处理
3.利用Scanmaster软件和T3D软 件进行数据处理
Hale Waihona Puke 3.利用Scanmaster软件和T3D软 件进行数据处理
3.利用Scanmaster软件和T3D软 件进行数据处理
2.输入线路参数 2.1 输入断链表参数:点击“线路参数”选项卡中“断链表”,弹出断链表参 数输入对话框,
3.利用Scanmaster软件和T3D软 件进行数据处理
RIEGL三维激光扫描仪培训新教程

RIEGL三维激光扫描仪培训新教程RIEGL是一家全球领先的激光测量技术公司,专注于研发和制造高精度、高质量的三维激光扫描仪。
为了帮助用户更好地理解和应用RIEGL的产品,该公司定期提供培训课程。
本文章将介绍RIEGL三维激光扫描仪培训的新教程。
RIEGL的培训课程旨在向用户传授掌握RIEGL激光扫描仪的基本原理、操作技巧和数据处理方法。
培训课程通常分为理论和实践两个部分,通过理论部分的讲座和实验室实践,学员可以深入了解RIEGL激光扫描仪的工作原理和技术特点。
在理论部分的讲座中,培训师通常会介绍激光扫描仪的基本原理、器件构成和性能参数。
学员将学习到激光扫描仪如何通过激光束扫描和接收返回的反射波,从而生成三维点云数据。
此外,还会介绍RIEGL激光扫描仪的扫描范围、分辨率、测量速度等参数,并解释其对实际应用的影响。
在实践部分的实验室实践中,学员将有机会亲自操作RIEGL激光扫描仪,并进行数据采集和处理。
培训师将指导学员如何正确设置激光扫描仪的参数、选择扫描模式和调整扫描角度,以获取最佳的数据质量。
学员还将学习如何使用RIEGL的数据处理软件,对采集的数据进行拼接、滤波和建模等处理。
此外,RIEGL的培训课程还特别关注应用案例的分享和讨论。
培训师将介绍RIEGL激光扫描仪在各个行业中的应用案例,包括建筑测量、地形测绘、工程监测、文物保护等领域。
通过分享不同应用场景下的经验和教训,学员可以更好地理解RIEGL激光扫描仪的优势和限制,并探讨如何解决实际问题。
总结起来,RIEGL三维激光扫描仪培训的新教程包括理论部分的讲座、实践部分的实验室实践和应用案例的分享。
通过这些培训课程,学员可以全面了解RIEGL激光扫描仪的原理和技术特点,掌握其正确操作和数据处理方法,并通过应用案例的分享,深入了解实际应用中的挑战和解决方案。
这将有助于提高用户在使用RIEGL激光扫描仪时的效率和准确性,从而更好地应用于各个行业中。
RIEGL VZ—1000型三维激光扫描仪地形测量作业方法
RIEGL VZ—1000型三维激光扫描仪地形测量作业方法本文介绍了了RIEGL VZ-1000地面三维激光扫描仪组成及工作原理,详细讲述了该软件地形测绘后处理工作流程,为用户能客观的认识与选择技术交流。
标签:RIEGL VZ-1000 地面三维激光扫描仪点云1引言地面激光扫描仪技术采用高速激光测量技术,以高精度高密度离散点云形式来反射测量目标对象表面的三维形态信息,然后对点云观测数据进行处理,提取目标对象矢量化三维空间形态信息。
RIEGL VZ-1000三维激光扫描系统主要由三维激光扫描仪,软件部分包括系统控制软件和数据后处理软件RISCAN_PRO等,除此之外还配有GPS定位系统全站仪等常规测量系统为后续进行地面空间数据获取及数据拼接提供支持。
瑞格三维激光扫描仪其扫描原理是三维点云数据采集设备,主要包括激光发射器措施控制系统和测量每个激光脉冲水平角度与垂直角度根据空间三角函数的的原理计算出激光点在被测场景中的三维三坐信息,其工作原理是三维激光扫描仪发射出一个激光脉冲信号给物体表面反射后几乎沿相同的路径返向传到接收器。
测程范围达到1400米,扫描精度5mm@100m。
2野外数据采集处理数据采集包括根据扫描对象和周围环境进行设站,站点标靶点的安置采集参数的设置扫描区间(角度设置)相机分辨率等外业数据扫描等。
在摆放标靶点反射片时应该形成不规则三角形或多边形一般距离控制到3-5米范围内,这样可以倾斜扫描时扫描高度大一些,一般反射片不少于3个,同时在点云容易找到标靶反射片的位置,这一点非常重要否则可能导致扫描站作废。
反射片的实地坐标可配合GPS RTK采集。
3数据后处理(1)建立工程及数据下载:下载点击工具栏“project”命令-“New”-选择工程在计算机中存贮位置并为工程命名;双击工程名在出现的对话框中点击“Instrument”命令并且在“Network”命令下设置对应扫描仪中IP地址。
点击工具栏“HELP”-“download and convert”-选取需要的数据进行下载。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RIEGL 三维扫描仪地形图培训教程一.相机参数调整1.点击project—new新建一个扫描工程实例:2.右击左侧编辑栏的calibration,在弹出的方框中,选择第二项,即new cemara calibration (wirard):3.在新的对话框中,可以选定客户仪器自配置相机型号、配置镜头型号。
点击OK。
点击next,得到下一步设置相机镜头型号:点击next,得到下一步设置相机和镜头的序列号,可用x代替:点击OK,此时会在左侧编辑框中的calibration-camera二级菜单中出现新的相机参数图框:4.右击左侧编辑框的mounting菜单,选择new mounting选项。
这时,会出现新的安装图标:5.在左侧编辑框中右击scnas,建立新的扫描站和扫描工程:.在弹出的对话框中的instrument选项选择仪器型号;右击扫描站,在弹出的新对话框中,选中distance 前面的方框(表示在10m的距离处的扫描点间隔),start angle和stop angle设定起始角。
点击OK。
此时将得到扫描数据视图:6.点击左侧编辑框中的扫描数据图标,在出现的方框中选择find reflectors。
在弹出的新对话框中threshold detection设定反射率。
并且把delete existing tiepoints of tiepointlist 前面的方框选中。
此时将会出现以下界面:7.双击扫描数据的图标,选择在出现的对话框中选择2D显示模式:8.在新打开的二维视图中点击按钮,在下拉框中选择第一项,show TPL SOCS:此时,二维视图将出现仪器扫描点的坐标:如果有地物的反射率较高,可能会造成干扰点,此时在二维视图中,按住shift键,点鼠标选中,此点将变为红色:同时,在TPL的列表中将出现对应的该点的属性:此时,可直接点击按钮,删除该干扰点。
9.点击按钮,将选中TPL列表中的所有数据,再点击按钮,仪器将定位扫描TPL列表中的点位。
如果出现扫描点定位和标靶位置偏差较大的情况,可采用8所说的步骤,删除偏差大的点位。
需要注意的是:在TPL列表中删除相关点后,还要在左侧的编辑框中删除该点对应的照片的数据。
10.在scans中右击扫描数据的图标,在方框中选择image acquisition;第一次将会出现请你选择相机型号的提示,点击OK,并将在如下对话框中选择相机型号:再采取相同的步骤,仪器将自动对准扫描目标的位置进行拍照。
11.打开照片,选择按钮,在下拉框中选中show TPL POCS,照片中将出现扫描点的对应坐标:12.在照片视图中选中反射片的中心,按住shift点击,之后右击,选择add point to TPL,在弹出的对话框中,reflector type下选择5cm 模式:框选仪器扫描点和自定义反射片中心,点右键,选择link tiepoints together:重复次步骤,直到所有的点都被选中。
13.当全部都选中后,右击左侧编辑框的calibration,选择calibratecamera:在弹出的新的对话框中选择,初始相机标定和初始安装校准都选择命名的50MM,扫描站选择你所选择进行上面各步骤操作的站点:此时将弹出新的对话框:一步步点击,到第四步即image acquisition时,点击对话框下面的start,仪器将解算相关位置差。
注:如果此时出现错误提示,将重复上诉步骤,进行重新参数设定。
14.选择calibration,点击start。
将出现全新的对话框:在新的对话框中figure of merit 选择least squares fitting(最小平方配合),点击Use all,选中所有的参数,再点击start,系统将解算位置参数。
解算完成后,可在statistics中查看结果:当一个平均像素距离为0.5以,,可认为是正确的结果。
否则,将重新进行解算。
二.外业数据扫描1.建立新的扫描工程:点击project,在弹出的对话框中选择new:在新的对话框中输入要设定的工程名称:2.导入相机参数和位置参数:相机参数的导入:点击左侧编辑栏,选择calibrations前面的+,在二级树中右击camear 按钮,再选择new camear calibrations按钮:在弹出的对话框中,选择import按钮,选择import from project:双击选择的工程文件夹,点击RiSCAN图标:点击打开—OK。
位置参数的导入:点击左侧编辑栏,在打开的calibrations二级树中右击mounting按钮,再选择new mounting按钮:在弹出的对话框中选择import按钮,此时,软件会自动弹出对应相机参数的工程文件夹中的容:点击RiSCAN图标,点击打开—OK。
3.建立扫描站:右击左侧编辑框中的SCANS,选择new scanposition:软件会自动命名为scanpos001,点击OK即可。
在左侧的编辑框中会出现scanpos001,右击该图标,选择new singl scan。
在新的对话框中选择overview,软件会自动将扫描围设定为0°—360°;将对话框中的diatance the object前面的方框选中,其实软件会自动将扫描精度设定为0.35,此时的意思是在10m的半径处,每隔3.5cm扫描一个点。
(可根据实际需要自行设定扫描精度)。
点击OK,系统将进行扫描。
三.业数据处理:1.站点拼接:①GPS或者全站仪拼接:将GPS或者全站仪采集的坐标点的数据以.txt或者.csv格式的文件。
双击左侧编辑栏中的TPL(GLCS):在弹出的对话框中选择import tiepointlist按钮在新的对话框中选择数据保存的位置和格式:点击打开。
在新的对话框中,将X、Y、Z拖动到对应的值中。
(可参考操作视频registration 4分5秒处)在确定好相关的参数后,点击OK。
选中新进对话框中的点数据,然后右击,选择copy tiepoints to—TPL prcs,将坐标导入到项目中。
点击扫描站名前面的+,在左侧编辑栏中双击TPL(SOCS),依旧全部选中点数据,再点击,然后在弹出的对话框中选择project coordinate system,将第一站的数据往坐标系统中导。
在Minimum N中选择共同点的个数,最低3个,点击Start。
新的图框中:Standard deviarion ofresidues得出的是拼接的精度。
同样的方法,将后续站点往坐标系统中拼接。
②手工拼接:右击第一站的站点位置,选择末项registred:此时第一站站点后面会出现图标;打开两站数据,点击菜单栏的,将两站数据平铺在页面中;选择工具栏中的registration—Coarse registration:点击view A后面的方框,然后点击第一站的点云数据页面;(这样将第一站的点云数据和view A对应起来了)点击view B后面的方框,然后点击第二站的点云数据页面;(这样将第二站的点云数据和view B对应起来了)找到第一站的特征点,按照shift键的同时,点左键;用同样的方式在第二站中找出相同的特征点;然后在Coarse registration中点击按钮,此时中的数字将变为1,在最少找到3个共同点后,点击按钮即可。
2.纹理贴图:在左边编辑框中选择需要贴照片纹理的点云项,右击color from images:此时,软件会自动将该站点云对应的照片掉出来:点击OK按钮即可。
三.点云处理矢量化:将拼接好的几站数据拖到一个视图框中,点击工具栏按钮,将所有数据全部选中,此时点云会呈红色;然后点击按钮,将视图框中的点云进行矢量化处理;处理后的数据将被统一保存到object—polydata树下:删除杂点数据:点击工具栏中的按钮,可以通过矩形、多边形和自由选择三种方式来选择需要删除的杂点,当选中后,点击,进行删除。
(此操作不可逆)建立平面:选中所有的点云数据,单击按钮,在弹出的下拉框中,对于坐标系,选择所建平面的位置。
当创建平面后,在右侧的编辑栏中会出现该平面对应的相关属性,可通过该属性框对平面实现移位、改变大小、颜色等操作。
在右侧编辑框中,右击创建的平面,单击弹出的对话框中的modify orientation & position,会弹出用于条件平面方向和角度的对话框:选择action中的translate,然后在values中输入相应的数字,可以通过点击坐标系的三个左边来移动平面的距离位置;选择action中的rotate,可以移动平面的相对角度位置。
删除冗余点数据:①在左侧的编辑栏中,选中需要处理的点云数据,右击选择filter data,选中2.5D raster,会出现如下对话框:在reference plane 中选择刚才创建的平面,在width中选择所需要过滤的点的距离,在mode下拉框中选中要过滤的类型:True Minimum (保留到平面的最低点,最低点以上所有的点)。
在前面打勾,可以在去除冗余点的同事建立三角网。
②在某些情况下,需要进行人工干预。
点击工具栏上的,会出现下图的对话框:在plane中选择相关平面,通过bandwidth设定围上下值,通过offset 设定开始删除的点的位置,increment设定的是删除带的间隔。
按+/-号按钮来移动删除带。
建立三角网模型:选中所有的点云数据,右击选择triangulation—plane triangulation,出现下图对话框:在改对话框中可以调节建立三角网的角度大小和边长。
建立等高线:在建立的三角网模型基础上,点击按钮,弹出新的对话框:在步长step width中选择等高线的高程差。
建立三角网模型①打开需要建立模型的点云数据:②在点云数据下面建立平面(可参考前面的平面建立操作,这里介绍一种新的平面建立方法):i点击右侧编辑栏中的图标,会在右下侧的编辑框中出现相关的平面设置和属性图表:ii将cemara mode 设置到orthogonal模式:此时,页面将出现网格状的画面:iii点击平面建立按钮,使用下拉框选项From 2 points,此时将弹出一个对话框,对话框中将出现平面名称和相关设置。
在orientation中有:free、vertical、horizontal,分别标示用户所画平面的类型:自由定义,垂直,水平。
关掉对话框后可以查看所画平面的相关位置和属性:③点击创建三角网的图表,选择plane triangulation,在弹出的对话框中选定需要建立的三角网的最大最小角度和长度:注:此时要选中需要建立三角网模型的点云,如果你需要全部选择,则点击按钮,否则系统将弹出提示你没有选择需要建立三角网的提示框。