连杆挡块机构设计详细计算过程
第二章 平面连杆机构及其设计-4

§2-6 平面连杆机构的设计
二、用作图法设计四杆机构
(已知固定铰链和某一活动铰链,求另一活动铰链)。 已知固定铰链和某一活动铰链,求另一活动铰链)。——刚化转动法 已知固定铰链和某一活动铰链 )。 刚化转动法
求解内容: 求解内容: 已知条件: 已知条件:两连架杆的对应位置 确定连杆与摇杆相连接的活动铰链C的位置 确定连杆与摇杆相连接的活动铰链 的位置 曲柄AB AB: 曲柄AB:ϕ1 、 ϕ 2、 ϕ3 求解连杆杆L 求解连杆杆 BC、摇杆LCD的长度 、ψ 2、ψ 3 摇杆L 标线ED对应位置:ψ 1 对应位置: 摇杆 CD上标线 摇杆L 对应位置
§2-6 平面连杆机构的设计
二、用作图法设计四杆机构
步骤: 步骤:(1)选比例尺,作出连杆的已知位置; )选比例尺,作出连杆的已知位置; 的垂直平分线,其交点即为固定铰链点A。 (2)分别作 1B2、B2B3的垂直平分线,其交点即为固定铰链点 。 )分别作B (3)同理作出 点; )同理作出D点 即为所求。 (4)连接 、B、C、D即为所求。 )连接A、 、 、 即为所求
B’ B’’
§2-6 平面连杆机构的设计
二、用作图法设计四杆机构
4)作rt ∆C1C2P 的外接圆。 7)连接 、B、C、D即为所求。 ) 3、 按给定的行程速比系数 设计四杆机构 的外接圆。 、 按给定的行程速比系数K设计四杆机构 即为所求。 )连接A、 、 、 即为所求 则圆弧C) 2上任一点 至 则圆弧 1)铰链四杆机构 C1 ( 1PC 上任一点A至 和C2的连线的夹角都等于极 设已知摇杆的长度CD、 设已知摇杆的长度 、 位夹角θ,所以曲柄轴心A应 位夹角 ,所以曲柄轴心 , 摆角ψ及行程速比系数 应 摆角 及行程速比系数K, 及行程速比系数 在此圆弧上。 在此圆弧上。
平面连杆机构CAD1杆组法

对未来研究的展望
要点一
技术发展
随着计算机技术和数值分析方法的不 断进步,CAD1杆组法有望在未来实 现更加高效、精确和智能化的分析和 设计。例如,利用人工智能和机器学 习技术,可以自动识别和优化连杆机 构的设计参数,提高设计效率。
要点二
应用拓展
除了传统的机械设备领域,CAD1杆 组法还可以拓展应用到其他领域,如 机器人、医疗器械、航空航天等。这 些领域对连杆机构的设计和分析有更 高的要求,需要进一步发展和完善 CAD1杆组法。
要点三
跨学科融合
将CAD1杆组法与其他学科领域进行 交叉融合,如动力学、控制理论、优 化算法等,可以促进多学科的协同创 新,为平面连杆机构的设计和分析提 供更广阔的思路和方法。
THANKS FOR WATCHING
感谢您的观看
求解方程
分析结果
根据输入的初始条件和外作用力,利用数 学软件或编程语言求解方程,得到基本杆 组的运动轨迹和动态响应。
根据计算结果,分析基本杆组的运动规律 和动力学特性,进而推导整个机构的运动 特性和动力学行为。
CAD1杆组法的应用实例
曲柄摇杆机构分析
以曲柄摇杆机构为例,采用CAD1杆组法对 其进行分析,研究机构的运动特性和动力学 行为,为优化设计和改进提供依据。
应用领域
该方法广泛应用于农业机械、轻工机械、化工机械、食品机械、包装机械等领域,用于设计和改进平面连杆机构,提 高机械设备的性能和效率。
优势与局限性
CAD1杆组法具有高效、精确、直观等优点,能够快速分析和优化连杆机构的设计。然而,它也有一定的 局限性,例如对于复杂机构的解析能力有限,需要结合其他方法进行综合分析和设计。
平面连杆机构的分类
按照构件的数目,平面连杆机构 可分为三杆、四杆、五杆及多杆
6-4平面连杆机构的设计

§6-4 平面四杆机构的设计实知从动件动规①实现已知(从动件)运动规律(位置,速度,加速度)②实现给定点的运动轨迹•AMF保龄球置瓶机扫瓶机构•造型机反转机构解析法→精确作图法→直观※设计方法实验法→简便一.按照给定的行程速比系数设计四杆机构(作图法)二.按给定连杆位置设计四杆机构(作图法)三.按给定两连架杆对应位置设计四杆机构(解析法)三按给定两连架杆对应位置设计四杆机构(解析法)四.按给定点的运动轨迹设计四杆机构(实验法)一.按照给定的行程速比系数设计四杆机构:1.:1180−=K oθ(1)可求出极位夹角θ分析:曲柄摇杆机构1+K (2) ∠C 1AC 2=θψ→如果三点位于同一圆上θA D B B 2同圆上,θ是C 1C 2弧上O 已知: 摇杆长度1的圆周角→如何作此圆L 3, 行程速比系数K, 摆角ψθ→ ∠C 1PC 2=θ(未知A 点)∠C C P=90°P 点→可作→连OC 2交圆于P 点21∠C 1C 2P=90°-θP解:(1)确定作图比例,任选D 点,作摇杆两极位C 1D 和C 2D(2)过C 1作C 1C 2垂线C 1M-θψC 1M 与C 2N 交于P 点作∠C 1C 2N=90θ,A B 1B 2D (3)过C 1、C 2、P O θP作圆L 在圆上任选一点A(4)AC 1=L 2-L 1,AC 2=L 2+L 1→→无数解L 1=1/2(AC 2-AC 1)以L 为半径作圆,交B ,B 点P 112→曲柄两位置MN注意:•作图比列规定•缩小比例:1:2,1:10等•放大比例:2:1,10:1等放大比例2.导杆机构:已知:机架长L 4 , K 1−K o m n 解:(1)任选固定铰链中心C →1180+==K ϕθ作导杆两极位Cm 和Cnψ= θA B 2m n (2)作摆角ψ的平分AC AC L B 1A θ线AC,取AC=L 4→固定铰中心AψB 1B 2(3)过A 作导杆极位垂线=AB →唯一解φAB 1(AB 2)→L 1AB 1CC3、设计曲柄滑块•已知:滑块的行程H=50mm,偏距已知滑块的行程H50偏距e=30mm,行程速比系数K=1.4eθH3、曲柄滑块机构2B 1C b aA 34v cH c 1c 2θ−o 90已知:H ,K ,e求运动学尺寸。
连杆机构的设计1(5页)

连杆机构的设计1(5页)第一篇:连杆机构的设计1(5页)连杆机构的设计是机械原理中关于机构设计的重要内容。
它的设计有多种类型,其中按照行程速比系数进行设计是考试中最常见的类型,本文先举一个例子来说明其设计过程。
问题:设计一曲柄摇杆机构ABCD。
已知摇杆CD的长度 290 mm,摇杆两极限位置间的夹角,行程速比系数K = 1.25,连杆BC的长度260 mm。
试求曲柄的长度AB和机架AD的长度。
问题分析:设计四杆机构,实际上要确定两个固定铰链A,D的相对位置,以及AB,BC,CD的长度。
这里共有5个设计要素。
这里先进行简单的分析。
(A)固定铰链D的位置。
随便取一个作为初始位置。
已知。
(B)固定铰链A的位置。
待定。
(C)AB的长度。
待定。
(D)BC的长度。
已知,为260mm.(E)CD的长度。
已知,为290mm.这里的关键是要求出铰链A的位置,一旦确定后,根据AC的一个位置,就可以计算AB的长度。
确定铰链A的位置。
由于A在几何上就是一个点,要确定一个点的位置,在作图中基本上都是通过两根线相交而得来的。
这就是说,先根据某些已知条件得到A所在的一个曲线,再根据另外的已知条件得到A所在的另外一条曲线,二者相交得到A点的位置。
显然,这里根据形成速比系数就可以得到A点所在的一个圆,而另外A点所在的一条曲线,我们随着分析的深入,在解题过程中确定。
(1)计算极位夹角首先,计算极位夹角。
根据形成速比系数的定义,可以得到因此,极位夹角是20度。
(2)作出摇杆的两个位置然后,根据题意随便取一个点做出固定铰链A,然后随便做一个290mm的长度C1D作为摇杆的第一个位置,顺时针转动32度得到另外一个位置C2D。
(3)根据极位夹角确定转动副A所在的圆下面根据据极位夹角确定A点所在的圆。
连接C1C2.过C1作一条直线垂直于C1C2;过C2作一条直线,与C2C1的夹角是90-20=70度;上述两条直线相交于一点,该点命名为E点。
四杆机构设计

2021/10/10
12
借助惯性或采用机构错位排列的方法,使机构能顺 利通过死点位置而正常运转;而自锁是指机构在考 虑摩擦的情况下,当驱动力的作用方向满足一定的 几何条件时,虽然机构的自由度大于零,但机构仍 无法运动的现象。
④以O为圆心,C1O为半径作圆。
⑤作偏距线e,交圆弧于A,即为所求。
⑥以A为圆心,A C1为半径作弧交于E,得: l1 =EC2/ 2 l2 = A C2-EC2/ 2
2021/10/10
3
二、按预定连杆位置设计四杆机构
C1
a)给定连杆两组位置
C2
将铰链A、D分别 选在B1B2, C1C2连线的垂直平分线上任意 位置都能满足设计要求。
P
④作△P C1C2的外接圆,则A点必在此圆上。
⑤选定A,设Leabharlann 柄为l1 ,连杆为l2 ,则:A C1= l1+l2 ,A C2=l2- l1 => l1 =( A C1-A C2)/ 2
⑥以A为圆心,A C2为半径作弧交于E,得:
2021/1l01/1=0 EC1/ 2
l2 = A C1-EC1/ 2
7.一对心曲柄滑块机构,若以滑块为机架,则将演化
成___________机构。
8.曲柄为主动件的曲柄摇杆机构中,当从动摇杆处于
两极限位置时,________在该位置所夹的锐角,称
为极位夹角。
9.铰链四杆机构中,_____角越大,对机构的传动越
有利。
2021/10/10
22
10.死点是指不计摩擦时机构所处的特殊位置,可借 助_____或采用_____的方法使机构能顺利通过死点 位置而正常运转。
02平面连杆机构的设计计算
180°+
180°−
= 3.17 ;
摇杆摆角: = ∠ ′ − ∠ " = 90.07° 。
例 2-3 设计一曲柄摇杆机构。已知摇杆长度3 = 100,摆
角 = 30°,摇杆的行程速度变化系数 = 1.2。
(1)用图解法确定其
余三杆的尺寸;
(2)用式(2-6)和式(2-7)确定机构最小传动角(若
第2章
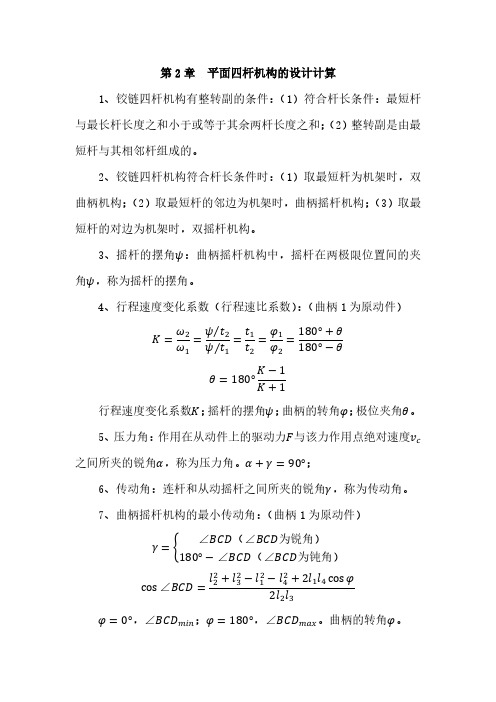
平面四杆机构的设计计算
1、铰链四杆机构有整转副的条件:(1)符合杆长条件:最短杆
与最长杆长度之和小于或等于其余两杆长度之和;
(2)整转副是由最
短杆与其相邻杆组成的。
2、铰链四杆机构符合杆长条件时:(1)取最短杆为机架时,双
曲柄机构;
(2)取最短杆的邻边为机架时,曲柄摇杆机构;
(3)取最
短杆的对边为机架时,双摇杆机构。
位置如题 2-13 图所示,
1 = 45°,
1 = 52°10′;2 = 90°,
2 = 82°10′;
3 = 135°,2 = 112°10′,机架长度 = 50 ,试用解析法求其
余三杆长度。
2-13 解:已知:
1 + 2 = 50 + 3
(b) 最短杆与最长杆长度之和= 45 + 120 = 165
其余两杆长度之和= 100 + 70 = 170
①满足杆长条件:最短杆与最长杆长度之和≤其余两杆长度之和;
②最短杆的邻边为机架;
所以此铰链四杆机构为曲柄摇杆机构。
(c) 最短杆与最长杆长度之和= 60 + 100 = 160
其余两杆长度之和= 70 + 62 = 132
机械原理课程设计图解法设计平面连杆机构
工程技术学院课程设计题目:图解法设计平面连杆机构摘要设计内容:设计曲柄摇杆机构。
已知摇杆长度l,摆角ψ,摇杆3的行程速比系数K,要求摇杆CD靠近曲柄回转中心A一侧的极限位置与机架间的夹角为∠CDA,试用图解法设计其余三杆的长度,并计算机构的最小传动角γ。
设计方法:在设计时首先需计算极位夹角θ,再绘制机架位置线及摇杆的两个极限位置,然后确定曲柄回转中心和各杆长度最后验算最小传动角 。
最后根据已知数据和所计算的数据进行图解,画出平面四杆机构图。
平面连杆机构是由若干构件用平面低副(转动副和移动副)联接而成的平面机构,用以实现运动的传递、变换和传送动力。
平面连杆机构的使用很广泛,它被广泛地使用在各种机器、仪表及操纵装置中。
例如内燃机、牛头刨、钢窗启闭机构、碎石机等等,这些机构都有一个共同的特点:其机构都是通过低副连接而成,故此这些机构又称低副机构低副机构低副机构低副机构。
关键词:机械设计基础机械设计基础课程设计平面四杆机构图解法极位夹角云南农业大学工程技术学院目录1题目 (3)1.1原始数据及要求 (3)1.2 工作量 (3)1.3 制图说明 (3)1.4 设计计算说明书包括的内容 (3)2 设计方案的讨论 (4)3 设计过程 (5)3.1 各杆长度的确定 (5)3.2 盐酸最小传动角 (6)4 小结 (7)5 参考文献 (8)1、题目1.1原始数据及要求:设计曲柄摇杆机构。
已知摇杆长度l,摆角ψ,3摇杆的行程速比系数K,要求摇杆CD靠近曲柄回转中心A一侧的极限位置与机架间的夹角为∠CDA,试用图解法设计其余三杆的长度,并计算机构的最小传动角γ。
1.2工作量:1.平面连杆机构图解法设计图纸一张。
2.计算说明书一份。
1.3制图说明:1.用3号图纸作图。
2.标注尺寸。
3.辅助线用细实线。
4.杆的一个极限位置用粗实线,另一个极限位置用虚线。
1.4设计计算说明书包括的内容:1.设计任务书2.目录3.设计过程3.1.计算极位夹角θ3.2.绘制机架位置线及摇杆的两个极限位置3.3.确定曲柄回转中心3.4.确定各杆长度3.5.验算最小传动角γ参考文献2、设计方案的讨论平面连杆机构是将各构件用转动副或移动副联接而成的平面机构。
杆组参数计算

Harbin Institute of Technology大作业设计说明书课程名称:机械原理设计题目:连杆机构运动分析院系:机电学院班级:1008107设计者:杨文德学号:**********指导教师:***设计时间:2012.05哈尔滨工业大学一.第23题如图:已知机构各构件的尺寸为AB=180mm,β=130,BC=290mm,CD=300mm,e=65mm,AD=150mm,DE=180mm,EF=500mm,构件1的角速度ω1=10rad/s,试求构件5上的点F的位移,速度和加速度.并对结果进行分析.图:二.机构结构分析,组成机构的基本杆组划分;1.自由度计算:平面连杆机构,所以F=3*n-2*PL-PH=3*5-2*7=12.基本杆组划分:1).原动件(一级杆组)组成构件1 杆组分类:RR简图:2).二级杆组组成构件2,3 杆组分类:RRR简图:3).二级杆组组成构件4,5 杆组分类:RRP简图:4).其余,也就是原动件以及机架简图:三.建立坐标系以A点为原点,AD方向为X轴,垂直AD想上方向为Y轴四.各基本杆组的运动分析数学模型;(1)原动件AB(一级杆组)已知原动件的转角ψ= 0-360原动件的角速度ω1 = 10 rad/s原动件的角加速度e1=0AB杆长为L=180mmxA=0 , yA=0vxA=0 , vyA=0axA=0 , ayA=0由RR杆组求出B点坐标(xB,yB),速度(vxB,vyB),加速度(axB,ayB) 2).二级杆组(RRR): BC CD DE 杆由B点坐标(xB,yB),速度(vxB,vyB),加速度(axB,ayB)D的坐标xD=150 , yD=0vxD=0 , vyD=0axD=0 , ayD=0BC杆长Li = 290mm CD杆长Lj = 300mmB,C,D为顺时针方向,所以M=1代入RRR杆组程序可求得DC的角度fj,角速度w3,角加速度e3由几何方程可以求得E点坐标(xE,yE),速度(vxE,vyE),加速度(axE,ayE) 3).二级杆组(RRP) EF杆,滑块5由E点坐标(xE,yE),速度(vxE,vyE),加速度(axE,ayE)EF杆长Li=EF=500mmCD杆长Lj = 0滑块导路方向角ψj=0计算位移s时参考点K的位置(xK=0,yK=e=65mm)速度(vxK=0,vyK=0)加速度(axK=0,ayK=0)代入RRP杆组程序可求得滑块F的位移s5,速度v5,加速度a5五.计算编程主程序(VB):Private xB(3600) As Double 'B点的x 位移Private yB(3600) As Double 'B点的y 位移Private vxB(3600) As Double 'B点的x 速度Private vyB(3600) As Double 'B点的y 速度Private axB(3600) As Double 'B点的x 加速度Private ayB(3600) As Double 'B点的y 加速度Private f3(3600) As Double '杆3的转角Private w3(3600) As Double '杆3的角速度Private e3(3600) As Double '杆3的角加速度Private s5(3600) As Double '5的位移Private vs5(3600) As Double '5的速度Private as5(3600) As Double '5的加速度Private pi As DoublePrivate pa As DoublePrivate Sub Command1_Click()Dim iAs DoubleDim j As LongDim RR1 As RRDim RRR1 As RRRDim RRP1 As RRPSet RR1 = New RRSet RRR1 = New RRRSet RRP1 = New RRPpi = 3.1415926pa = pi / 180Picture1.Scale (-20, 1000)-(390, -40)Picture1.Line (-20, 0)-(390, 0) 'X Picture1.Line (0, 1000)-(0, -40) 'Y Picture1.CurrentX = 330: Picture1.CurrentY = 40 Picture1.Print "主动件转角/度" 'X表示Picture1.CurrentX = 10: Picture1.CurrentY = 960 Picture1.Print "滑块位移S /mm" 'Y表示For j = 30 To 390 Step 30 'X轴坐标Picture1.Line (j, 5)-(j, 0)Picture1.CurrentX = j - 5: Picture1.CurrentY = 0 Picture1.Print jNext jFor j = 0 To 1000 Step 80 'Y轴坐标Picture1.Line (0, j)-(5, j)Picture1.CurrentX = -20: Picture1.CurrentY = j + 2 Picture1.Print jNext jPicture1.DrawStyle = 2For j = 0 To 1000 Step 80Picture1.Line (-20, j)-(390, j), vbBlack'横向网格Next jFor j = 0 To 390 Step 30Picture1.Line (j, -20)-(j, 1000), vbBlack'纵向网格Next jPicture2.DrawWidth = 1Picture2.Scale (-20, 2500)-(390, -8000)Picture2.Line (-20, 0)-(380, 0) 'XPicture2.Line (0, 2500)-(0, -8000) 'YPicture2.Print "主动件转角/度"Picture2.Print "滑块速度V mm/s"For j = 30 To 390 Step 30 'X轴坐标Picture2.Line (j, 5)-(j, 0)Picture2.CurrentX = j - 5: Picture2.CurrentY = 0 Picture2.Print jNext jFor j = -7200 To 2500 Step 800 'Y轴坐标Picture2.Line (0, j)-(5, j)Picture2.Print j Array Array Next jPicture2.DrawStyle = 2For j = -8000 To 2500 Step 800Picture2.Line (-8000, j)-(2500, j), vbBlack '横向网格Next jFor j = 30 To 390 Step 30Picture2.Line (j, -8000)-(j, 2500), vbBlack '纵向网格Next jPicture3.DrawWidth = 1Picture3.Scale (-20, 90000)-(380, -200000) Picture3.Line (-20, 0)-(390, 0) 'XPicture3.Line (0, 90000)-(0, -200000) 'YPicture3.CurrentX = 300: Picture3.CurrentY=10000 Picture3.Print "主动件转角/度"Picture3.CurrentX = 10: Picture3.CurrentY=80000 Picture3.Print "滑块加位移a mm/S^2"For j = 30 To 390 Step 30 'X轴坐标Picture3.Line (j, 5)-(j, 0)Picture3.CurrentX = j - 5: Picture3.CurrentY = 0 Picture3.Print jNext jFor j = -200000 To 90000 Step 10000 'Y轴坐标Picture3.Line (0, j)-(5, j)Picture3.CurrentX = -20: Picture3.CurrentY = j + 7 Picture3.Print jNext jPicture3.DrawStyle = 2For j = -200000 To 90000 Step 10000Picture3.Line (-200000, j)-(90000, j), vbBlack Next jFor j = 0 To 390 Step 30Picture3.Line (j, -200000)-(j, 90000), vbBlack Next j'主程序For i = 0# To 3600# Step 0.1 '主动件转角0-360,f1(i) = i * pa / 10'RR类模块属性赋值RR1.f = f1(i)RR1.L = 180RR1.w = 10RR1.e = 0RR1.xA = 0RR1.yA = 0RR1.vxA = 0RR1.vyA = 0RR1.axA = 0RR1.calRR '执行RR类模块方法xB(i) = RR1.xByB(i) = RR1.yBvxB(i) = RR1.vxBvyB(i) = RR1.vyBaxB(i) = RR1.axBayB(i) = RR1.ayBRRR1.Li = 290'RRR类模块属性赋值RRR1.Lj = 300RRR1.xB = xB(i)RRR1.yB = yB(i)RRR1.M = 1RRR1.vxB = vxB(i)RRR1.vyB = vyB(i)RRR1.axB = axB(i)RRR1.ayB = ayB(i)RRR1.xD = 150RRR1.yD = 0RRR1.vxD = 0RRR1.vyD = 0RRR1.axD = 0RRR1.ayD = 0RRR1.calRRR '执行RRR类模块方法f3(i) = RRR1.fjw3(i) = RRR1.wje3(i) = RRR1.ejRRP1.Li = 500 'RRP类模块属性赋值RRP1.Lj = 0RRP1.fj = 0RRP1.wj = 0RRP1.ej = ORRP1.xK = 0RRP1.yK = 65RRP1.vxK = 0RRP1.vyK = 0RRP1.axK = 0RRP1.ayK = 0RRP1.xB = 150 + 180 * Cos(f3(i) - 130 * pa)RRP1.yB = 0 + 180 * Sin(f3(i) - 130 * pa)RRP1.vxB = 0 - w3(i) * 180 * Sin(f3(i) - 130 * pa)RRP1.vyB = 0 + w3(i) * 180 * Cos(f3(i) - 130 * pa)RRP1.axB = 0 - w3(i) ^ 2 * 180 * Cos(f3(i) - 130 * pa) - e3(i) * 180 * Sin(f3(i) - 130 * pa)RRP1.ayB = 0 - w3(i) ^ 2 * 180 * Sin(f3(i) - 130 * pa) + e3(i) * 180 * Cos(f3(i) -130 * pa)RRP1.calRRP '执行RRP类模块方法s5(i) = RRP1.ssvs5(i) = RRP1.vssas5(i) = RRP1.assPicture1.PSet (i / 10, s5(i)) '画出滑块位移s5(i)与主动件转角i/10的关系图Picture2.PSet (i / 10, vs5(i)) '画出滑块位移v5(i)与主动件转角i/10的关系图Picture3.PSet (i / 10, as5(i)) '画出滑块位移as5(i)与主动件转角i/10的关系图Next iPicture4.Print " 滑块位移速度加速度主动件转角"For i = 0 To 3600 Step 20Picture4.Print s5(i); vs5(i); as5(i); i / 10 '显示滑块部分位移,速度,加速度的值Next iEnd Sub六.分析结果滑块位移,速度,加速度与主动件转角的对应值(部分)滑块速度--主动件转角关系图七.计算结果分析主动件转角为0时,滑块的位移为478mm,随着转角的匀速增加,滑块位移先下降(向左运动),速度为负快速上升,加速度为正且开始值很大并逐渐下降,到达最低点463mm左右,此时速度为0, 然后开始上升(向右运动),速度也随之增大,然后到达最大值840左右,此时速度为0, 又开始下降(向左运动),速度反向增大,在后面一段时期速度急剧增大,加速度为负的很大然后速度上升,加速度急剧正向增加. 滑块就是这样周期性的左右运动。
机械原理课程设计-连杆机构B4完美版
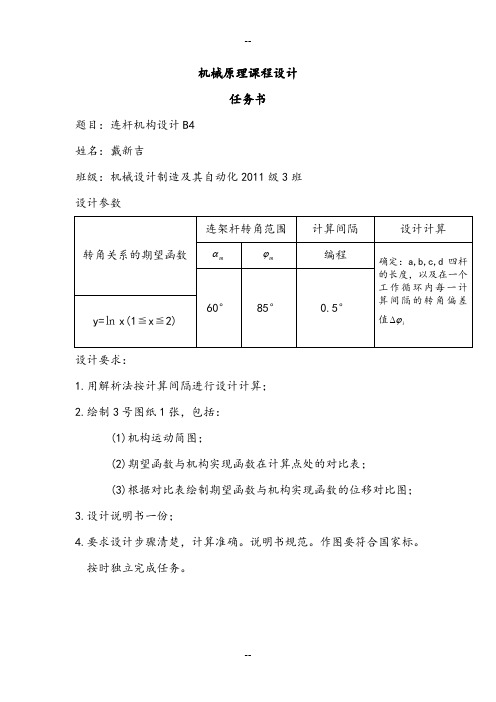
机械原理课程设计任务书题目:连杆机构设计B4姓名:戴新吉班级:机械设计制造及其自动化2011级3班设计参数设计要求:1.用解析法按计算间隔进行设计计算;2.绘制3号图纸1张,包括:(1)机构运动简图;(2)期望函数与机构实现函数在计算点处的对比表;(3)根据对比表绘制期望函数与机构实现函数的位移对比图;3.设计说明书一份;4.要求设计步骤清楚,计算准确。
说明书规范。
作图要符合国家标。
按时独立完成任务。
目录第1节 平面四杆机构设计 ................................. 3 1.1连杆机构设计的基本问题 ............................... 3 1.2作图法设计四杆机构 ................................... 3 1.3作图法设计四杆机构的特点 ............................. 3 1.4解析法设计四杆机构 ................................... 3 1.5解析法设计四杆机构的特点 ............................. 3 第2节 设计介绍 ......................................... 5 2.1按预定的两连架杆对应位置设计原理 ...................... 5 2.2 按期望函数设计 ....................................... 6 第3节 连杆机构设计 ..................................... 7 3.1连杆机构设计 ......................................... 7 3.2变量和函数与转角之间的比例尺 .......................... 8 3.3确定结点值 ........................................... 8 3.4 确定初始角0α、0ϕ .................................... 9 3.5 杆长比m,n,l 的确定 .................................. 13 3.6 检查偏差值ϕ∆ ....................................... 13 3.7 杆长的确定 .......................................... 13 3.8 连架杆在各位置的再现函数和期望函数最小差值ϕ∆的确定 . 15 总结 .................................................... 17 参考文献 ................................................ 18 附录 ..................................... 错误!未定义书签。
机械原理-连杆机构设计图解法_一_
连杆机构设计(图解法)
按给定连杆位置设计四杆机构 按给定两连架杆对应的角位移设计四杆机构
按给定的急回要求设计四杆机构
按给定连杆位置设计四杆机构
按给定连杆位置设计四杆机构
给定连杆三个位置,设计四杆机构
B1
A1
E1
A
2
E2
A3
B2
A0
B0
E3
B3
A0 A1 B1 B0就是所求机构的第一个位置。
m12
N1 M2
n12
M1 M0
动平面上任选两个参考点 M、N——动铰链
N2
12 12
P12
N0
m12上任选M0—定铰链
n12上任选N0—定铰链
引导平面由E1到E2的位置的 四杆机构有无数
两连架杆上动铰链和定铰链与极连线的夹角 相等∠M1 P12 M0= ∠N1 P12 N0= θ 12/2
方法:半角转动法
方法:半角转动法
原理
N1 M1 M2 E1 E2 N2
动平面由E1到E2的位置过程中,动 平面上任意一点都可以视为绕某点 P12转θ 12
P12——转动极(极)
θ 12——有向转动角
E1、E2两个位置一经确定,P12、 θ 12就确定与选择的参考点无关
12
P12
转动极P12 的求法
m12
N1 M2
n12
M1
连接P12M1和P12M2,所夹 的角即为转动角θ 12
N2
12 12
P12
连接P12 N1和P12 N2 ,所 夹的角也为转动角θ 12 ∠M1 P12 M2= ∠N1 P12 N2= θ 12
动平面由E1到E2的位置可由四杆机构实现
02平面连杆机构的设计计算

02平面连杆机构的设计计算设计计算是指根据设计要求和机构参数进行计算,以确定机构的尺寸、材料和工作性能等技术指标的过程。
本文将介绍02平面连杆机构的设计计算,包括机构类型选择、杆件尺寸设计和运动性能分析等。
一、机构类型选择1.传动比要求:根据实际需要确定机构的传动比,即输入与输出杆件的运动比值。
2.运动要求:根据机构所需完成的运动类型和精度要求,选择适合的机构类型。
3.结构紧凑度:考虑机构安装空间、结构合理性和制造工艺等因素,选择紧凑、易制造的机构类型。
二、杆件尺寸设计杆件尺寸设计是机构设计的关键环节,决定着机构的强度、刚度和运动特性。
具体步骤如下:1.确定负荷:根据使用条件和设计要求,确定机构的负荷、转矩和速度等参数。
2.计算受力:根据杆件的位置和受力情况,计算杆件的拉压应力和弯矩等。
3.材料选择:根据受力情况和材料性能,选择合适的材料,如碳钢、合金钢等。
4.尺寸计算:根据受力计算结果,计算杆件的截面尺寸、直径和长度等。
5.强度校核:根据材料强度和尺寸,进行强度校核,确保杆件在工作条件下不发生破坏。
6.刚度分析:根据杆件尺寸和连接方式,计算机构的刚度和变形情况,确保机构的工作精度。
三、运动性能分析运动性能分析是对机构运动特性进行计算和评估的过程,对于确定机构的工作性能和优化设计具有重要意义。
具体步骤如下:1.运动解析:根据机构的运动模式和约束条件,进行运动解析,得到机构的运动方程和转角速度等。
2.运动参数计算:根据机构的运动方程和参数,计算机构的位移、速度、加速度和滑动速度等。
3.动力学分析:对机构的动力学特性进行计算和分析,包括惯性力、弹性力和粘性力等。
4.稳定性分析:对机构的稳定性进行分析,确保机构的运动平稳和可靠性。
5.优化设计:根据运动性能分析结果,对机构的参数和结构进行优化设计,提高机构的工作效率和精度。
总结:02平面连杆机构的设计计算是通过选择合适的机构类型、进行杆件尺寸设计和运动性能分析,来确定机构的尺寸、材料和工作性能等指标。
平面四连杆机构等效转动惯量计算公式和应用

(((((( (2)
可得方程组:
"XC=- YC·tan (θ)
YC= #XC- XO1 $·tan (θ1 )
解得瞬心坐标:
《一重技术》
’ )
))XC=
) ))
XO1·tan %θ1 &·tan %θ& 1+tan %θ1 &·tan %θ&
(
) )
))YC=
- 17 -
T=T1+T2+T3
式中,
T1=
1 2
2
J1 ωA
T2
=
1 2
J2
2
ωC
+
1 2
JC
2
ωC
=
1 2
!J2 +JC "ωC2
T3
=
1 2
2
J3 ωB
令:
T=
1 2
2
Jv ωA
(JV 即为系统的等效转动惯量)
2
2
2
则:
JV =J1 + !J2 +Jc
"·
L1
2
+J3·L21·BC2
AC
L3·AC
根据平行轴定理:
Calculation For mula And Application of Equivalent Rotating Iner tia of Plane 4- tie Bar Mechanism
Zhang Yuanqi, Xu Shaotang
Abstr act: A calculation formula of equivalent rotating inertia is derived from particle kinetic energy and rigid shaft rotating kinetic energy theory and rigid plane motion theory. Key wor ds: equivalent rotating inertia; plane 4 tie bar mechanism; plane motion
机械设计原理-连杆机构

常用传动角的大小和变化来衡量机构传力 性能的好坏。设计时通常要求γmin≥40°, 对于高速和大功率的传动机械, γmin≥50°。
最小传动角的确定
图示铰链四杆机构中,原动件为
AB。各杆长度为:a、b、c、d。
由图可见,γ 与
机构的∠BCD有关。 在ΔABD和ΔBCD中,
B
11 a A
F2
第四章 连杆机构
连杆机构:由若干个构件通过低副连接而组 成,又称为低副机构。
平面连杆机构:所有构件均在相互平行的平 面内运动的连杆机构。
空间连杆机构:所有构件不全在相互平行的 平面内运动的连杆机构。
由于平面连杆机构不仅应用广泛,而且还往 往是多杆机构的基础;所以这里重点介绍平 面连杆机构.
4.1 平面连杆机构的类型
2b
C
F
c
F1vc
3
4d D
由余弦定理得:
BD2 a2 d 2 2ad cos BD2 b2 c2 2bc cosBCD
则
BCD cos1 b2 c2 a2 d 2 2ad cos
2bc
BCD cos1 b2 c2 a2 d 2 2ad cos
C C1
C2
l2
B
l3
φ1
l1 θ
ψ
B1
l4
A
D
φ2
B2
行程速比系数
k
v2 v1
c1c2 / t2 c1c2 / t1
t1 t2
1 2
180 180-
或:
=180 k 1
k 1
结论:当θ≠0时,机构具有急回运动特性,θ角愈 大,K值愈大,急回运动特性愈显著。
[详细设计]连杆设计的详细计算
![[详细设计]连杆设计的详细计算](https://img.taocdn.com/s3/m/b01d2b7049d7c1c708a1284ac850ad02de8007c1.png)
[详细设计]连杆设计的详细计算篇一: 连杆设计的详细计算第四章典型零部件的设计连杆是发动机最重要的零件之一,近代中小型高速柴油机,为使发动机结构紧凑,最合适的连杆长度应该是,在保证连杆及相关机件运动时不与其他机件相碰的情况下,选取小的连杆长度,而大缸径的中低速柴油机,为减少侧压力,可适当加长连杆。
[]连杆的结构并不复杂,且连杆大头、小头尺寸主要取决于曲轴及活塞组的设计。
在连杆的设计中,主要考虑的是连杆中心距以及大、小头的结构形式。
连杆的运动情况和受力状态都比较复杂。
在内燃机运转过程中,连杆小头中心与活塞一起作往复运动,承受活塞组产生的往复惯性力;大头中心与曲轴的连杆轴颈一起作往复运动,承受活塞连杆组往复惯性力和不包括连杆大头盖在内的连杆组旋转质量惯性力;杆身作复合平面运动,承受气体压力和往复惯性力所产生的拉伸.压缩交变应力,以及压缩载荷和本身摆动惯性力矩所产生的附加弯曲应力。
为了顺应内燃机高速化趋势,在发展连杆新材料、新工艺和新结构方面都必须既有利于提高刚度和疲劳强度,有能减轻质量,缩小尺寸。
对连杆的要求:1、结构简单,尺寸紧凑,可靠耐用;2、在保证具有足够强度和刚度的前提下,尽可能的减轻重量,以降低惯性力;3、尽量缩短长度,以降低发动机的总体尺寸和总重量;4、大小头轴承工作可靠,耐磨性好;5、连杆螺栓疲劳强度高,连接可靠。
但由于本设计是改型设计,故良好的继承性也是一个考虑的方面。
4.1连杆材料结合发动机工作特性,发动机连杆材料应当满足发动机正常工作所需要的要求。
应具有较高的疲劳强度和冲击韧性,一般选用中碳钢或中碳合金钢,如45、40Cr等,本设计中发动机为中小功率发动机,故选用一般的45钢材料基本可以满足使用要求。
4.2连杆主要尺寸1、连杆长度l曲柄连杆比?一般均大于0.3,这样可以使柴油机的机体高度降低,净质量减少,而且连杆长度减小后,其材料也相应减少,从而成本降低。
[]但是,过小的曲柄连杆比会引起活塞侧压力增加,从而导致柴油机摩擦损失的增加,加速活塞、活塞环、气缸套的磨损,影响可靠性。
4-4 平面连杆机构的设计

y
B
b
C
ab cd
a cos bcos d c cos
a
c
A
d D
a sin bsin csin
x R1 R2 cos R3 cos cos( )
把三组对应角位置
R1
a2
案例分析:已知加热炉炉门上两个活动铰链的中心矩为 50mm,炉门打开成水平位置时,要求炉门温度较低的一面 朝上(如虚线所示),设固定铰链安装在YY轴线上,其相 关尺寸如图所示,求此铰链四杆机构其余三杆的长度。
CopyRight ZDJ
4.4 平面四杆机构的设计
2、按给定连杆的两个位置设计四杆机构 已知铰链四杆机构连杆B1C1、B2C2 、 B3C3的三个位
c2 d 2ac
2
b2
1,1;2, 2;3, 3
带入,可得关于
R2
d c
,
R3
d a
R1, R2 , R3 的三元一次方程组
实验法设计四杆机构
连杆曲线 四杆机构在运动时,连杆作平面运动,连杆上任一点的轨迹为一封闭曲
线,这些曲线称为连杆曲线
连杆曲线的形状随点在连杆上的位置和构件的相对长度的不同而不同
90
A
O
lAB l AB lBC l BC
3 按给定两连架杆的对应位置设计四杆机构
刚 化 反 转 法
给定两连架杆上三对对应位置的设计问题
B2
B3
E1
E2
B1
1 2
E3
C1
1 2
3
3
A
D
5.5 支挡式结构设计计算(16∶9)
5基坑工程5.5 支挡式结构设计计算一、支挡式结构的构成及计算内容二、支挡式结构的计算方法简介三、支挡式结构计算弹性支点法四、土层锚杆五、内支撑结构☐支挡式结构的构成⚫结构形式:悬臂式、支撑式、锚拉式支挡式结构。
⚫结构构件:挡土构件(桩或墙)、锚杆、支撑结构。
☐支挡式结构的设计计算内容⚫挡土构件(桩或墙)的设计及受力变形计算⚫锚杆的设计计算⚫支撑结构体系的设计计算一、支挡式结构的构成及计算内容挡土构件(桩或墙)悬臂式~挡土构件(桩或墙)锚拉式~支撑挡土构件(桩或墙)支撑式~二、支挡式结构的计算方法简介☐传统的经典方法(不能计算支挡结构的变形,但计算简单,可手算)⚫静力平衡法:只适用于悬臂式、单支点支挡结构的受力计算。
⚫布鲁姆简化计算法:适用于悬臂式支挡结构的受力计算。
⚫等值梁与连续梁法:适用于单支点、或多支点式支挡结构的受力计算。
☐弹性支点法(能计算支挡结构的内力和变形,但计算复杂,一般不可手算)又称为弹性抗力法或地基反力法。
适用于悬臂式、单支点和多支点支挡结构的计算。
☐有限单元法(能同时计算支挡结构和周边环境的应力和变形,但计算工作量大且复杂)分杆系和实体有限单元法,此处指后者。
适用于各种场地、工况和支护结构形式。
☐悬臂式支挡结构⚫计算模型:将挡土构件(桩或墙)视为竖向弹性地基梁,根据弹性地基梁理论导出控制微分方程:⚫计算方法:采用幂级数解法或杆系有限元法对上述方程求解,可得到挡土构件(桩或墙)的内力和变形,并据此对挡土构件进行设计。
40a 40ak d yEI b b m z y zh d p ⋅−−⋅+⋅=()悬臂式支挡结构h d挡土构件弹簧☐有支点(支撑或锚杆)支挡结构⚫支点及支点力的处理将每个支点用一弹簧代替,并将每个支点力转化为支挡结构计算宽度上的力作用于支点处,再将其并入前述悬臂式支挡结构计算模型进行计算。
⚫挡土构件(桩或墙)的内力和变形计算采用杆系有限元法可求出挡土构件(桩或墙)的内力和变形,并据此对挡土构件进行设计。
杆及结构的变形计算

1 i
li
M
0 i
M
i
Ei Ii
dsi
i
li
N
0 i
N
i
Ei Ai
dsi
上述公式也可计算角位移,只要将P0视为单位力偶 就能够了。此时公式中旳M0 i,N0 i 即为单位力偶作用 在该构造上所引起旳相应内力。
所以,此时旳功能关系式应是:
A A0 P0 i
li
Mi M0i 2Ei Ii
2
dsi
i
li
Ni N0i 2Ei Ai
2
dsi
用此式减去前两式,可得:
P0 i
li
M 0i M i Ei Ii
dsi
i
li
N0i Ni Ei Ai
dsi
end
为了能直接得到 旳数值,可令P0=1,而相应于此
退出
7-l 拉伸(压缩)时旳变形
单段等截面 等轴力杆件
l Nl EA
多段等截面 等轴力杆件
l Nili
Ei Ai
多段变截面或 变轴力杆件
l
Ni (x) dx
i li Ei Ai (x)
例7-l 计算杆在自重作用下所引起旳伸长,设杆长为l,横截面面积为A,
材料旳比重为g,,弹性模量为E。
ymax y xl ql 4 / 8EI
end
7-4 求杆件变形旳叠加法
在假定杆旳变形微小及材料服从虎克定律旳前提下,杆旳变形(一 般指旳就是截面形心旳线位移和截面旳角位移)都是外加载荷旳线性齐 次函数。所以,当杆上有多种载荷共同作用时,尤其是当各载荷单独作 用时旳变形成果已知(如有表可查)时,用叠加法来计算杆旳变形尤为以 便,用式子体现,以挠度为例,即:
连杆挡块机构设计详细计算过程

规格目的・动作∙将工件传送到下一工序前,阻挡工件,在下一工序准备完成后解除。
环境·操作性∙调整输送机和下一工序的节拍时间的差异的机构。
对象工件∙工件:金属垫圈∙尺寸:φ28×t8、内径10mm∙重量:约34g特点规格・尺寸∙动作规格o薄型气缸的行程:10mmo挡块的行程:10mm∙尺寸o W125×D100×H249mm主要零件的选型依据∙气缸o为了节省空间,选择薄型气缸。
设计要点主要零件的计算过程∙根据直线运动部分负载和凸轮重量验证气缸推力。
∙气缸的推力o所需推力:F=(F1×r1+F2×r2)/ro直线运动部分的负载:F1=μm×9.8No直线导轨的摩擦系数:μ=0.1(实测值)o直线运动部分总重量:m=0.096kgo F1=0.1×0.096×9.8=0.0941No凸轮的自重:F2=0.185kg×9.8m/sec²=1.814No凸轮中心与直线运动部分之间的距离:r1=60mmo凸轮中心与凸轮重心之间的距离:r2=25.77mm(通过3D CAD测量)o凸轮中心与关节轴承之间的距离:r=60mmo F=(0.0941×60+1.814×25.77)/60=0.776No动作空气压力为0.4MPa时的气缸理论推力:F0=80N(φ16)(根据产品目录) o将负载率设为η=50%,o实际推力=F0×0.5=40N≫F,具有充分的余量构造制作与设计要点∙通过底座下的凸轮机构和气缸进行驱动。
∙可同时使用2台进行避让。
也可调整工件间距。
∙对于型材,通过螺栓组装3块经铣削加工的板,价格较低且可轻松确定连杆与直线导轨的平行度。
∙设计连接板时,紧密固定支点的导向轴和轴承,通过固定环固定导向轴单侧(左图中为相反侧),以便在不向轴承施加轴向负载的状态下进行定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
规格
目的・动作
∙将工件传送到下一工序前,阻挡工件,在下一工序准备完成后解除。
环境·操作性
∙调整输送机和下一工序的节拍时间的差异的机构。
对象工件
∙工件:金属垫圈
∙尺寸:φ28×t8、内径10mm
∙重量:约34g
特点
规格・尺寸
∙动作规格
o薄型气缸的行程:10mm
o挡块的行程:10mm
∙尺寸
o W125×D100×H249mm
主要零件的选型依据
∙气缸
o为了节省空间,选择薄型气缸。
设计要点
主要零件的计算过程
∙根据直线运动部分负载和凸轮重量验证气缸推力。
∙气缸的推力
o所需推力:F=(F1×r1+F2×r2)/r
o直线运动部分的负载:F1=μm×9.8N
o直线导轨的摩擦系数:μ=0.1(实测值)
o直线运动部分总重量:m=0.096kg
o F1=0.1×0.096×9.8=0.0941N
o凸轮的自重:F2=0.185kg×9.8m/sec²=1.814N
o凸轮中心与直线运动部分之间的距离:r1=60mm
o凸轮中心与凸轮重心之间的距离:r2=25.77mm(通过3D CAD测量)
o凸轮中心与关节轴承之间的距离:r=60mm
o F=(0.0941×60+1.814×25.77)/60=0.776N
o动作空气压力为0.4MPa时的气缸理论推力:F0=80N(φ16)(根据产品目录) o将负载率设为η=50%,
o实际推力=F0×0.5=40N≫F,具有充分的余量
构造制作与设计要点
∙通过底座下的凸轮机构和气缸进行驱动。
∙可同时使用2台进行避让。
也可调整工件间距。
∙对于型材,通过螺栓组装3块经铣削加工的板,价格较低且可轻松确定连杆与直线导轨的平行度。
∙设计连接板时,紧密固定支点的导向轴和轴承,通过固定环固定导向轴单侧(左图中为相反侧),以便在不向轴承施加轴向负载的状态下进行定位。