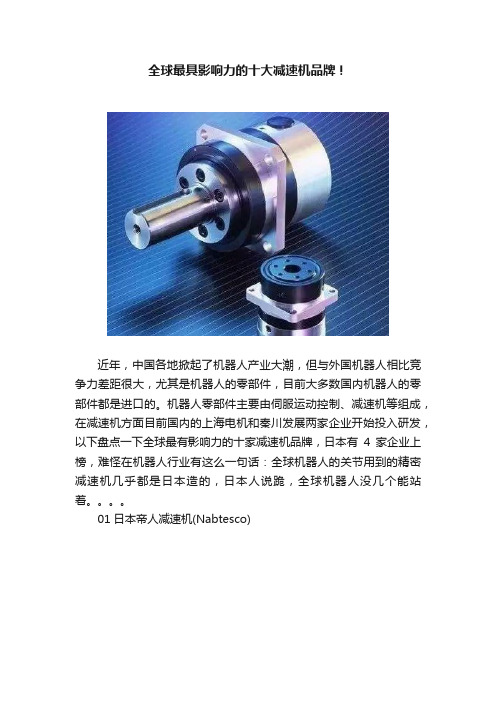
日本住友高精密RV减速机
摆线轮

摆线针轮减速器的研究现状摆线针轮减速器国外的研究现状上世纪在50年代到70年代间,对针摆传动的理论做大量研究主要是国外学者。
前苏联科学家库德罗夫采夫,推导出了一套标准齿形受力分析理论,对针摆传动的理论发展做出了巨大的贡献。
许多国内教材和工具书上描述的受力分析方法大都是这个库氏理论的引用、修正和改进。
然而它也有其局限性,它仅仅使用于无齿侧间隙的理想啮合状态。
波兰Manfred Chmurawa等科学家建立了理论标准齿廓的数学模型,通过有限元计算的方法对摆线轮齿面的接触力和接触变形进行了计算,但是使用的摆线轮的数学模型是理论的的齿廓,而理论齿廓和实际齿廓有一定的偏差,因此计算前提出现了一定的偏差,所以计算值和实际相比误差仍然很大。
Kuen-Bao提出了基于d'Alembert原理的K-H-V摆线机构传动效率计算、静力学分析和运动学分析的数学模型。
Chang.S L利用微分和几何学,建立了外旋轮线少齿差针摆传动压力角的数学模型。
在针摆传动机构设计方面,Botsiber针对摆线传动机构的工作原理进行了研究,具有较少的分析工作。
Malhotra和Parameswaran针对设计参数对摆线减速器各个构件的理论效率及作用力的影响进行了研究。
虽然德国人发明了摆线少齿差传动,然而德国在这方面的研究相对缓慢;上世纪70年代末,慕尼黑工业大学的Lehmann博士曾经对摆线齿形的误差的形成、分布规律以及成型原理做了一定的探讨,还指出了法向修形产生的间隙大于径向修形所产生的间隙。
并对生产的样机进行了动态测试,结果表明:由于啮合时间隙的存在,摆线轮和针齿同时啮合的齿数小于针齿数的一半,并连续发表了5篇该方面的研究论文。
但以后该方向的研究并没有持续下去。
德国Birkholz.H博士利用相对精密的实验设备对摆线传动装置传动时,由于不同的原因产生的转动误差进行了测量,还对其转速变化的情况进行了探讨。
Blanche和Yang开发了具有加工误差的摆线传动的分析模型并研究了加工误差对齿侧间隙的影响,并且提出了使用计算机辅助分析程序来检验针摆传动的性能。
RV减速机的前世今生

RV减速机的前世今生当我们在无限憧憬机器人时代的时候,你可曾知道,机器人最关键的机械结构之一RV减速机,到今天,中国仍然不具备设计和制造能力。
“十二五”时期,国家“863”计划将其列入重点攻克的技术瓶颈。
国内顶尖大学和科研机构几年攻关也只有论文,没有实物。
机器人所有核心零部件中,减速机最为关键。
工业机器人成本结构大致如下:本体22%、伺服系统25%、减速器38%、控制系统10%以及其他5%。
简单拆分国内6轴工业机器人成本(总成本25万元),可以看出减速器和伺服电机两项成本接近13万元,主要以进口为主。
今天小编就综合各方资料,为大家讲述下RV减速机。
一、RV减速机的机械原理德国人劳伦兹·勃朗于1926年创造性地提出了一种少齿差行星传动机构,它是用外摆线作为齿廓曲线的,这就是最早期的针摆行星传动,由于两个啮合齿轮其中之一采用了针轮的形式,这种传动也被称做摆线针轮行星齿轮传动。
RV传动一种全新的传动方式,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,而且因为具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
以RV-E型减速机为例第1减速部…正齿轮减速机构输入轴的旋转从输入齿轮传递到直齿轮,按齿数比进行减速。
这是第一减速部。
第2减速部…差动齿轮减速机构直齿轮与曲柄轴相连接,变为第二减速部的输入。
在曲柄轴的偏心部分,通过滚动轴承安装RV齿轮。
另外,在外壳内侧仅比RV齿轮数多一个的针齿,以同等的齿距排列。
如果固定外壳转动直齿轮,则RV齿轮由于曲柄轴的偏心运动也进行偏心运动。
此时如果曲柄轴转动一周,则RV齿轮就会沿与曲柄轴相反的方向转动一个齿。
这个转动被输出到第2减速部的轴。
将轴固定时,外壳侧成为输出侧。
纳博特斯克 RV-110E 减速机二、RV减速机对机器人的重要性机器人第一关节到第四关节全部使用RV减速机,轻载机器人第五关节和第六关节有可能使用谐波减速机。
住友减速机资料

• 同年成立住公司,成为中国大陆地区的销 售中心,同时建立松江装配中心及售后服务中心。
精选完整ppt课件
7
住友重机械减速机(中国)有限公司
• 为更好的向各地区的客户提供服务,2002年设立了上海、南京、北京、广州、武汉、沈阳、 郑州、济南、天津办事处。
• 2003年增加了昆明、西安、成都、福州办事处。
• 2003年由住友重机出资,投资US$ 68,000,000.00在上海 松江出口加工区建立工厂,整个投资分为四期,现一期已 竣工投产,二期已进入前期准备工作。目标是争取用5年时 间,使它成为住友重机械(PTC)的第10个制造中心。
精选完整ppt课件
日
精选完整ppt课件
本
欧洲
韩 国
中
国
6
住友重机械减速机(中国)有限公司
住友重机早在上世纪70年代,就开始向中国提供成套及配套产品,仅在上海宝钢集 团、武钢集团热轧厂、冷轧厂、硅钢厂都可以看见不少于500台 住友减速机安全的运行了30年。
住友中国公司从1994年成立,开始了在中国的投资,致力于向中国客户提供优 质的减 速机产品及服务。
精选完整ppt课件
12
welcome to sumitomo
謝謝 !
精选完整ppt课件
13
住友-动力传动及控制设备的专家 提供给您更好的解决方案
精选完整ppt课件
1
住友集团、住友重机械及住友重机械减速机(PTC)介绍
住友集团是一家拥有400年历史的企业,旗下拥有20家主要公司,目前还是位于世界 500强的全球性企业集团。
• 住友重机械工业株式会社 • 住友化学工业株式会社 • 三井住友银行株式会社 • 住友金属工业株式会社 • 住友金属矿山株式会社 • 住友商事株式会社 • 住友生命保险相互会社 • 住友轻金属工业株式会社 • 住友建设株式会社 • 住友电木株式会社
工业机器人RV减速机的机械原理

当我们在无限憧憬工业机器人时代的时候,你可曾知道,工业机器人最关键的机械结构之一RV减速机,到今天,中国仍然不具备设计和制造能力。
“十二五”时期,国家“863”计划将其列入重点攻克的技术瓶颈。
国内顶尖大学和科研机构几年攻关也只有论文,没有实物。
工业机器人所有核心零部件中,减速机最为关键。
工业机器人成本结构大致如下:本体22%、伺服系统25%、减速器38%、控制系统10%以及其他5%。
简单拆分国内6轴工业机器人成本(总成本25万元),可以看出减速器和伺服电机两项成本接近13万元,主要以进口为主。
一、RV减速机的机械原理德国人劳伦兹·勃朗于1926年创造性地提出了一种少齿差行星传动机构,它是用外摆线作为齿廓曲线的,这就是最早期的针摆行星传动,由于两个啮合齿轮其中之一采用了针轮的形式,这种传动也被称做摆线针轮行星齿轮传动。
RV传动一种全新的传动方式,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,而且因为具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
第1减速部…正齿轮减速机构输入轴的旋转从输入齿轮传递到直齿轮,按齿数比进行减速。
这是第一减速部。
第2减速部…差动齿轮减速机构直齿轮与曲柄轴相连接,变为第二减速部的输入。
在曲柄轴的偏心部分,通过滚动轴承安装RV齿轮。
另外,在外壳内侧仅比RV 齿轮数多一个的针齿,以同等的齿距排列。
如果固定外壳转动直齿轮,则RV齿轮由于曲柄轴的偏心运动也进行偏心运动。
此时如果曲柄轴转动一周,则RV齿轮就会沿与曲柄轴相反的方向转动一个齿。
这个转动被输出到第2减速部的轴。
将轴固定时,外壳侧成为输出侧。
二、RV减速机对工业机器人的重要性工业机器人第一关节到第四关节全部使用RV减速机,轻载工业机器人第五关节和第六关节有可能使用谐波减速机。
重载工业机器人所有关节都需要使用RV减速机。
平均而言,每台工业机器人使用4.5台RV减速器。
全球最具影响力的十大机器人减速机品牌

全球最具影响力的十大机器人减速机品牌近年来人力和原材料的上涨给中国制造业带来了巨大的压力,加上发达国家正试图用高度自动化技术来取代中国的制造,一些觉醒的企业已经开始升级自动化,提高工作的生产效率和降低成本。
机器自动化已经成为全球制造业的发展的方向,尤其是机器人产业得到了迅速的发展。
据预测到2015年,中国机器人市场需求将达35000台,占全球比重16.9%,成为全球规模最大的市场。
有如此巨大的市场,自动化行业巨头都在虎视眈眈,纷纷进入中国布局。
中国各地同时掀起了机器人产业大潮,但与外国机器人相比竞争力差距很大,尤其是机器人的零部件,目前大多数国内机器人的零部件都是进口的。
机器人零部件主要由伺服运动控制、减速机等组成,在减速机方面目前国内的上海电机和秦川发展两家企业开始投入研发,以下盘点一下全球最有影响力的十家减速机品牌。
日本帝人减速机(Nabtesco)日本帝人公司(纳博特斯克(Nabtesco))是一家居世界领先地位的精密传动控制系统及组件制造商。
帝人精密减速机在对减速机有特殊要求的行业尽显技术优势,其中RV系列在机器人行业应用中处于非常大的领先地位,而其后推出的RD系列是在拥有世界机器人市场上使用超过200万台骄人业绩的RV系列减速机基础上进行改良,使其使用上更加方便容易。
帝人Nabtesco RVRDRA系列减速机具有高可靠性、高刚性、高精度比、转矩大、轴向尺寸小等特点,为了直接支持较大载荷,内部装有大型角接触球轴承,采用双支撑支持机构和针轮机构,即使施加高达五倍额定转矩时,产品也不会损坏。
帝人Nabtesco RVRDRA 系列减速机特别适用于频繁正反转,对精度和刚度有高要求,对轴向尺寸要求短的行业领域。
Nabtesco製造RV减速器具有长期使用不需再加润滑剂、寿命长、刚度好、减速比大、低振动、高精度、保养便利等优点,适用于在机器人上使用。
其它运用,如:工业机器人、。
住友减速机内部结构
住友减速机内部结构住友减速机是一种常见的机械传动装置,广泛应用于工业生产中。
它的内部结构包括减速器、电机、轴、齿轮等部件,这些部件相互配合,实现了减速的功能。
减速器是住友减速机的核心部件之一。
它由外壳、齿轮和轴承等组成。
外壳起到固定和保护内部部件的作用,齿轮则通过啮合来传递动力。
住友减速机通常采用多级齿轮传动的结构,通过不同级别的齿轮组合来实现不同的减速比。
这种结构能够提供较大的输出扭矩和较低的转速,适用于各种工业场合。
电机是住友减速机的驱动部件。
它通过电能转换为机械能,为减速器提供动力。
电机内部包括定子和转子两部分。
定子是固定不动的部分,它通过电流产生磁场。
转子则是旋转的部分,它受到磁场的作用而转动。
住友减速机通常采用交流电机或直流电机作为驱动源,具有功率大、效率高、运行平稳的特点。
轴是住友减速机的连接部件。
它负责将电机的转动传递给减速器,并且将减速器的输出转动传递给其他设备。
轴一般由金属材料制成,具有一定的强度和刚度。
住友减速机的轴通常采用直径较大、长度较短的设计,以提高刚度和传动效率。
齿轮是住友减速机的关键部件之一。
它是实现减速的主要手段,通过不同齿数的齿轮组合来实现不同的减速比。
住友减速机的齿轮通常采用硬质合金材料制成,具有较高的硬度和耐磨性。
齿轮的精度和啮合间隙对住友减速机的传动性能有重要影响,因此在制造过程中需要严格控制。
住友减速机的内部结构包括减速器、电机、轴和齿轮等部件。
它们相互配合,通过电能转换和齿轮传动来实现减速的功能。
住友减速机具有功率大、效率高、运行平稳等优点,广泛应用于各个行业的工业生产中。
RV减速器研究现状与展望
RV减速器研究现状与展望何卫东;单丽君【摘要】从理论和实验两方面总结了RV减速器的国内外发展状况和关键研究技术,从齿形优化、传动精度、回差和扭转刚度四方面总结了RV减速器理论研究内容,从加工工艺和整机性能两方面进行了总结了RV减速器的实验研究内容,对RV 减速器未来的研究工作进行了展望.【期刊名称】《大连交通大学学报》【年(卷),期】2016(037)005【总页数】6页(P13-18)【关键词】RV减速器;传动精度;扭转刚度;回差【作者】何卫东;单丽君【作者单位】大连交通大学机械工程学院,辽宁大连116028;大连交通大学机械工程学院,辽宁大连116028【正文语种】中文RV减速器是一种新型的摆线针轮行星传动,具有传动比范围大、传动精度高、回差小、刚度大、抗冲击能力强、体积小、结构紧凑、传动效率高等特点.与谐波传动相比具有更高的疲劳强度、刚度和寿命,且回差精度稳定,不像谐波传动那样随着使用时间增长运动精度就会显著降低,故目前世界上许多国家高精度设备的传动多采用RV减速器,如工业机器人、数控机床、半导体设备、精密包装设备、焊接变位机、等离子切割、烟草机械、印刷机械、纺织机械、医疗器械、跟踪天线、雷达等方面.RV减速机在工业机器人领域的应用最为广泛,已成为工业机器人的三大核心技术之一.20世纪30年代摆线齿廓应用于精密传动,德国人L. Braren 在少齿差行星传动基础上发明了摆线针轮行星减速器,1939年日本住友重机械株式公社引入此项技术,20世纪80年代,市场对机器人传动精度要求的不断提高,日本帝人公司在传统摆线针齿传动的基础上发明了RV减速器(Rotary Vector)[1].后来在韩国和中国也出现了研究机构或公司对RV减速器进行研究开发及生产.以德国和日本的先进技术为代表,RV减速器已经形成了不同承载能力、不同传动比的系列产品,其回差及传动精度小于1,能够满足不同的行业要求.日本帝人公司在1986年,取得阶段性成果,实现了RV减速器的产业化,其生产销售也处于世界垄断地位,占据全球60% 左右的市场,但公司许多核心技术至今仍然处于保密状态.我国对工业机器人用精密减速器的研究相比国外较晚,与国外先进技术相比存在一定的差距,严重制约了我国工业机器人的发展进程.20世纪80年代,国内部分厂商和院校开始致力RV减速器的国产化和产业化研究,如重庆大学机械传动国家重点实验室,宁波中大力德智能传动股份有限公司、天津减速机厂,秦川机床厂,大连交通大学等.但这些科研院所的研究多数还仅限于理论和实验研究,即使个别生产出成型的产品,与日本、德国等国家的同类产品相比在传动性能上仍存在较大的差距.国内最早研究RV减速器的是大连交通大学以李力行教授为首的科研团队,从20世纪80年代末就开始了这方面的研究.总结出一整套适用于机器人用高运动精度、小回差、高刚性的RV传动的优化设计理论,并应用该理论成果成功地研制出我国第一台主要技术性能指标(运动精度、间隙回差、扭转刚度和传动效率)达到国际先进水平的机器人用RV- 250AⅡ减速器样机[2- 6].目前正承担国家自然基金项目"机器人RV传动动态传动精度设计理论与方法研究",系统研究动态传动各主要影响因素与整机传动精度关系的机理.RV减速器的技术可以归纳为以下三个主要方面:RV减速器设计理论的研究(包括齿形优化、传动精度、回差和扭转刚度)、加工工艺的研究和减速器整机性能测试的研究.1.1 RV减速器设计理论的研究1.1.1 RV减速器齿形优化的研究RV减速器不仅要求摆线针轮传动部分多齿同时啮合,而且要求合理的啮合间隙来补偿制造、安装误差,同时要求摆线轮齿形有利于实现严格的回差限制.这就对齿形优化修形方法和修形量提出较苛刻的要求.大连交通大学齿轮研究中心[7- 10]建立了摆线齿轮的通用齿形修形方式,提出采用正等距与负移距组合的修形方法,其齿形的工作部分通过优化逼近共轭齿形,同时参与啮合齿数多,承载能力大,这种修形方法能够较准确地在工程实际条件中进行摆线轮的力分析;针对RV减速器高运动精度、低回差的特点,又提出了摆线轮负等距与负移距优化组合的修形方法,并建立了修形量的优化数学模型.通过对日本样机上的摆线轮测绘齿形进行深入分析,提出摆线轮分段优化组合新齿形,该齿形能够保证机器人用RV减速器的高精度、高承载能力及高运转平稳性的要求.1.1.2 RV减速器传动精度的研究高精度RV减速器用于高精密的传动,最重要的性能指标是必须具有高的运动和位置精度,这样才能使精密机械的工作机构精确的达到预定的位置.国内外学者在RV 减速器传动精度方面的研究成果较多.20世纪 80年代末,Blanche 等人[11- 12]采用纯几何学的方法研究了单摆线轮的摆线针轮行星减速器的传动精度,探讨了齿隙和速比波动与扭转振动的关系.利用CAD 的方法推导出齿隙、速比波动与扭振的关系.该项研究只考虑了单级、单摆线轮的摆线针轮减速器的传动精度,未考虑到双级、多摆线轮、多曲柄的RV减速器;只考虑了针齿销半径变化一种误差的影响与扭振的关系,未涉及到双级、多摆线轮、多曲柄及各元件的加工、安装误差的影响.1994年日本学者日高照晃等人[13- 15]进行了更深入的研究,研究了两级、三曲柄、双摆线轮RV减速机的传动精度.运用"质量弹簧等价模型"方法,建立了摆线针轮行星齿轮减速器的传动误差数学模型,探讨了单项加工误差、装配误差对传动精度的影响,也讨论了部分误差综合作用时对传动精度的影响,实验结果与Blanche 的研究成果取得了很好的一致性,但研究的是无负载的静态传动误差,没有考虑间隙、零件弹性变形和负载大小等诸多因素对动态传动误差的影响,这使得上述两种方法在实际运用中受到限制.但这两位学者的研究成果对后人的研究有较大的启发和引领作用.由于国外资料多数都是不公开的,对于传动精度方面的新技术了解是非常有限的.国内以大连交通大学李立行、何卫东教授为代表的学者,从20世纪80年代开始研究RV 减速器传动精度,已经从单纯的几何精度或静态精度方面逐步深入到非线性动态精度领域,以考虑更多的因素对减速器传动精度的影响.齿轮研究所对RV减速机的传动精度进行了深入的理论研究,具体研究成果如下:(1)提出了RV传动几何回差的计算模型,进行了回差敏感性分析,找出了对几何回差影响较大的因素:即针齿销与孔的配合间隙;针齿销半径误差、摆线轮的修形方法及等距修形误差等,为样机研制中确定合理的尺寸与形位公差、编制先进实用的工艺提供可靠的科学依据[16- 18];(2)建立了动态传动精度分析模型:考虑各构件的加工误差、装配误差、配合间隙和变形等因素,采用传递矩阵法建立高精度RV传动减速器系统动态传动精度分析模型.将减速器的运动离散成六大子结构,推导出具有19个自由度的动态平衡方程[10];(3)利用变步长数值积分Runge-Kutta法,基于Matlab编程求解RV传动减速器系统动态传动精度,得到系统传动误差值[10];(4)综合考虑摆线轮、针齿、行星架变形以及部件之间存在的间隙对输出端传动精度的影响,建立了RV减速器动态传动精度刚柔耦合分析模型,得到了综合传动误差曲线,分析了典型误差对系统传动误差的影响,每种误差不是简单叠加,而是相互耦合作用[10];(5)对RV减速器整机动力学特性的分析[19- 22]:对RV减速器的摆线轮、曲柄轴等关键零部件进行了模态分析,建立了RV传动系统的非线性动力学模型,分析了系统的动力学特性.沈允文、董海军和韩林山等人[23- 28]综合考虑各零件加工误差、装配误差和轴承间隙等误差因素的对传动精度的综合影响,对2K-V型传动装置的动态传动精度进行了建模与分析,已从线性进入到非线性领域.1.1.3 RV减速器回差的研究国外有关回差方面的资料是保密的,几乎查不到相关的文献.国内有很多学者从事回差方面研究.张诚,张建润[29]提出了一种以RV减速器几何回差上限值为约束的系统参数优化设计方法,建立了以几何回差为目标函数、系统参数为变量的优化设计模型,并进行了系统参数灵敏度分析.赵海鸣,王猛等[30]分析了RV减速器静态回差的影响因素,建立了矩阵形式的静态回差分析数学模型,并推导出了针齿中心圆半径误差等15项误差的误差分配数学模型.吴俊飞、李瑰贤[31- 32]提出了计算内啮合变厚齿轮副及变厚齿轮RV减速器的回差计算公式,给出变厚齿轮调隙量与回差之间的关系式及考虑调隙量的减速器回差计算式,实现调隙量对减速器回差的影响进行定量的分析,并对该减速器样机进行了回差的实验研究.李蒙[33]为了合理分配各传动零件的加工精度,详细分析了各个传动零件各种误差因素对RV减速器输出轴回差的影响,建立了各误差因素影响输出轴回差的数学模型.通过敏感性分析,找出了对输出轴回差影响较大的误差因素.张金[34]总结了影响系统回差18项误差影响因素,建立了各误差因素影响输出轴回差的数学模型.对影响 RV 减速器回差各影响因素的概率分布情况进行分析,推导出它们的数字特征和相应的逆变换公式.应用概率统计的方法对输出轴回差进行了计算,给出 RV 减速器回差的概率计算值.大连交通大学齿轮研究所[7,35]建立了机器人用高精度RV减速机几何回差计算的数学模型,针对机器人用高精度 RV-250A Ⅱ减速器,采用负等距与负移距修形优化组合修形的方法使齿形工作部分逼近负转角修形的摆线轮齿形,不仅保证了多齿共扼啮合,而且还可在保证需要的径向间隙条件下不仅不增加侧隙,还可以减少针齿销与孔配合间隙产生的超过需要的侧隙,从而有效地减小了间隙回差.1.1.4 RV减速器扭转刚度的研究RV传动必须具有高的运动精度和小的回差外,还必须具有很高的刚性.RV传动时扭转刚度有严格的要求,通常在额定转矩下,由扭转弹性变形引起的弹性回差不超过4′~5′,因此,设计RV传动必须进行刚度分析.大连交通大学齿轮研究所[17,36]建立了RV减速器扭转刚度计算模型,在对影响RV传动扭转刚度的五个部分(渐开线齿轮传动部分、摆线针轮传动部分、行星架输出机构部分、曲柄轴部分和轴承部分)的弹性变形能进行定量计算的基础上,不仅用常规方法,而且用三维有限元方法科学地计算出RV减速器的扭转刚度.并且[37]以RV- 40E减速器为例,考虑了输入轴扭转刚度、转臂轴承扭转刚度以及曲柄轴与行星架之间支撑刚度,建立了RV 减速器的等效扭转刚度模型.考虑摆线轮与针轮之间的啮合刚度具有时变性,对等效扭转刚度数学模型进行了修正,得到了其等效扭转刚度计算方法及结果.聂春松[38]基于应力函数法对输出机构的扭转变形进行了分析,利用有限元法得到输出机构的变形量,对其扭转刚度进行了计算.杨玉虎[39]在ANSYS环境下建立了考虑轴承刚度、轮齿啮合刚度及各构件弹性的有限元模型,模型将轴承刚度按非线性变化规律考虑.分析得出整机扭转刚度的变化规律,应用该模型进一步分析了摆线轮与针齿啮合齿数以及轴承刚度变化对整机扭转刚度的影响规律.上述文献在建立扭转刚度分析模型时,只考虑了单因素为非线性的、时变的,但无论是输入轴扭转刚度、转臂轴承扭转刚度还是曲柄轴与行星架之间支撑刚度都不是定值,都是时变的,因此,扭转刚度分析模型有待于进一步精确化.1.2 RV减速器加工工艺的研究当RV设计理论逐渐趋于完善的情况下,RV减速器的加工工艺成为制约传动精度和回差的主要瓶颈.李兴凯等人[40- 43]对RV传动的关键件,摆线轮和曲柄轴的加工工艺进行了初步研究,根据摆线轮铣削加工特点,建立了摆线轮数控加工有限元分析模型,针对典型薄壁件铣削加工中的变形问题,仿真分析了铣削摆线轮薄壁轮缘时铣削力与变形之间的关系.大连交通大学何卫东教授带领团队与南车戚墅堰机车车辆工艺研究所有限公司(简称戚墅堰研究所)、宁波中大力德智能传动股份有限公司联合攻克这方面的难题.宁波中大力德智能传动股份有限公司从日本进口了三菱磨齿机ZE40A、MAKINO加工中心、喜基亚外偏心轴磨床/多面体数圆磨床GPES- 30、TOYO立式磨床TVG- 35C- 2S等高精度数控加工设备.研究了RV减速器每个零件的加工工艺过程,设计出使整机传动误差和回差最小时,每个件的加工工艺和整机的装配路径,加工装配出多套型号为RV- 20,RV- 40、RV- 80减速器.采用三坐标测量仪对加工出所有零件进行测量,根据测量结果计算出整机的传动误差和回差.如果传动误差和回差大于1,再重新修改加工工艺,确定每个零件合理的公差范围,直到使加工出的RV减速器传动误差和回差都小于1.目前,加工出的RV减速器传动误差和回差还不是很稳定,有待于进一步改进.1.3 RV减速器整机性能测试技术的研究工业机器人对高精度 RV 减速器有着严格的要求,因此需要对 RV 减速器样机进行传动误差、回差和扭转刚度的测试实验,以评价产品的性能.国内测试设备大多只能实现单一参数的测量,如吴俊飞,位云成[44- 45]设计的测量仪器,能够实现对传动误差或回差的测量.减速器综合性能测试方面的研究较少,虽然文献[46- 51]研究的测量仪器能够实现对减速器传动误差、回差、扭转刚度、传动效率和摩擦力矩等参数的组合测量,但尚处于研究阶段,测试精度有待于进一步经过实测的检验.大连交通大学齿轮研究所[52]在1999年成功地研制出了达国际先进水平的机器人用RV- 250Ⅱ减速器样机,并研制了一套能进行静态回差、运动精度、刚度试验的试验装置及一套能进行动态回差和运动精度测试的试验装置.最近,宁波中大力德智能传动股份有限公司与大连交通大学与联合测试了RV- 20,RV- 40、RV- 80减速器的回差和扭转刚度.实验中,固定输入轴(输入齿轮),然后向输出轴(输出法兰)施加转矩,则会产生与转矩相应的扭曲.具体将输入的一端固定后,将输出装置逐步进行转矩加载,将其加载到额定转矩之后再进行减载,之后再反向转矩加载.在加载过程中时刻记录其刚度数据,并绘制相应刚度迟滞曲线图.在试验中把输出轴上的转矩与对应弹性变形的扭转角之比定义为减速机的扭转刚度.在试验中按照国际上的减速机回差的测试标准,施加的转矩为额定输出转矩的±3%.测得RV减速器的迟滞曲线.以RV80E为例,由迟滞曲线计算得出齿隙为55″,回差为56.5″,扭转刚度为203.26 N.m/arcmin,同理可以算得其它系列的RV减速器的侧隙、回差和扭转刚度.本文根据RV减速的使用要求,从理论和实验两方面总结了RV减速器的国内发展状况和关键研究技术,结论如下:(1)RV减速器的理论研究:包括RV减速器齿形优化、传动精度、回差和扭转刚度的研究.RV减速器传动精度与回差已经从单纯的几何、静态逐步深入到非线性动态传动精度与回差的研究,研究的方法更逼近工程实际,研究结果更精准;扭转刚度从单因素、线性逐步深入到单因素非线性、多因素非线性,扭转刚度分析模型进一步精确化;(2)RV减速器加工工艺的研究:国内加工出的RV减速器的传动误差和回差还不是很稳定,不能保证批量化生产的减速器传动误差和回差都小于1,需要系统研究,找出症结所在;(3)RV减速器整机性能测试技术的研究:目前未见满足RV减速器使用要求的成熟的整机检测设备,有待于研究开发.国内虽然在RV减速器的理论和实验等方面取得了许多成果,但与发达国家的同类产品相比,还有很大差距,还有许多技术有待于进一步深入研究,未来工作的展望如下:(1)总结RV减速器的动态传动精度分析理论及方法,整理针摆行星传动啮合部分中曲柄轴、轴承、摆线轮、针轮等零部件的加工精度、间隙大小等的分布规律对整机传动精度的影响,找出一套合理的在实际制造和装配过程中误差分配方法,提出一套符合实际的适用于高精度摆线针轮传动系统的传动精度设计理论及方法; (2)零件加工过程中,专用检测仪器的研究,研制出满足RV减速器精度要求的,在加工和装配过程的专用检测仪器;(3)自主开发曲轴、摆线轮、行星齿轮、输入轴等关键材料,替代进口;开展热处理、制造等工艺研究,制定机器人用RV减速器关键零部件用材料系列化技术规范和批量化生产工艺规范;(4)研究整机的装配工艺与路径,研制出RV减速器专用的装配设备,实现RV 减速器自动化、智能化装配,以满足RV减速器传动精度和回差的要求.E-mail:***************.【相关文献】[1]张丰收,祝鹏.减速器传动精度的研究[J].机械设计,2015,32(4):1- 3.[2]李力行,关天民,王子孚.大型摆线针轮行星传动的合理结构和齿形[J].机械工程学报,1988,24(3):28- 34.[3]何卫东,李力行.RV传动的研究[J].大连铁道学院学报,1993,14(3):104- 107.[4]李力行,何卫东,王秀琦.机器人用高精度RV传动研究[J].中国机械工程,1999,10(9):1001- 1002.[5]李力行,关天民,王子孚.大型摆线针轮行星传动的合理结构和齿形[J].机械工程学报,1988,24(3):28- 34.[6]李力行,何卫东,王秀琦.机器人用高精度RV传动的研究[J].大连铁道学院学报,1999,20(2):1- 11.[7]何卫东,李力行,李欣.机器人用高精度RV减速器中摆线轮的优化新齿形[J].机械工程学学报,2000(3):51- 55.[8]何卫东,李力行.高精度RV减速器中摆线轮齿形的优化修形[J].大连铁道学院学报,1999,20(2):54- 58.[9]何卫东,李欣,李力行.机器人用高精度RV传动中摆线轮修形对回差影响的研究[J].机械传动,1999,23(1):24- 25.[10]吴鑫辉.机器人用RV减速器齿形优化新方法及传动精度研究[D].大连:大连交通大学,2015.[11]BLANCHE J G,YANG D C H.Cycloid drives with machining tolerances[J].Journal of Mechanisms Transmissions and Automation in Design,1989,111(9):337- 344.[12]BLANCHE J G,YANG D C H.Design and application guidelines for cycloid drives with machining tolerances[J].Mechanismand Machinery Theory,1990,25(5):487- 501. [13]日高照晃,王宏猷,石田武.ほか.サイクロイド齒車を用ぃたK-H-V形遊星齒車装置の回转传达误差に开する研究(第1报,解析方法)[C].日本耭械学会论文集,1994:645- 653.[14]石田武,王宏猷,日高照晃.ほか.サイクロイド齒車を用ぃたK-H-V 形遊星齒車装置の回转传达误差に开する研究(第2报,各种加工误差、组立误差が回转传达误差に及ほす影响)[C].日本耭械学会论文集,1994:3510- 3517.[15]石田武,王宏猷,日高照晃.ほか.サイクロイド齒車を用ぃたK-H-V 形遊星齒車装置の回转传达误差に开する研究(第 3 报,各種误差にほる相互影响)[C].日本耭械学会论文集,1994:3518- 3525.[16]吴永宽,郑剑云.摆线针轮行星传动的几何回差分析计算[J].大连铁道学院学报,1999,20(2):28- 32.[17]何卫东.机器人用高精度RV传动的研究[D].哈尔滨:哈尔滨工业大学,1999.[18]吴永宽,何卫东,李力行.RV减速机运动精度误差因素及高运动精度工艺保证[J].大连铁道学院学报,1999,20(2):33- 36.[19]肖君君,何卫东.RV减速器摆线轮的有限元模态分析[J].传动与控制,2009(9):46- 47.[20]何卫东,姜振波,鲍君华.RV传动中曲柄轴的模态分析[J].大连交通大学学报,2011,32(2):28- 31.[21]SHAN L J,FAN Y T G,HE W D.Analysis of Nonlinear Dynamic Accuracy on RV Transmission System[J].Advanced Materials Research,2012,510:529- 535.[22]SHAN L J,FAN Y T G,HE W D.Nonlinear Dynamic Model and Equations of RV Transmission System[J].Advanced Materials Research,2012,510:536- 540.[23]竹振旭,董海军,韩林山.误差组合方式对RV型减速机传动精度的灵敏度分析[J].机械设计,2008,25(10):69- 73.[24]袁昕,武兰英,韩林山.误差对RV 型减速机传动精度的灵敏度研究[J].机电产品开发与创新,2009,22(2):46- 38.[25]韩林山,沈允文,董海军. 2K-V型传动装置动态传动精度理论研究[J].机械工程学报,2007(6):81- 86.[26]韩林山,沈允文,董海军.基于非线性分析方法的摆线针轮系统传动精度研究[J].中国机械工程,2007(9):1039- 1043.[27]韩林山,沈允文,董海军.2K-V型传动装置制造误差对传动精度的影响[J].机械科学与技术,2007(9):1135- 1140.[28]韩林山,谭群燕,沈允文.间隙及转矩对型传动装置传动精度的影响[J].机械科学与技术,2007(8):1011- 1014.[29]张诚,张建润.RV减速器几何回差分析与系统参数优化设计[J].机械设计与制造,2015,44(8):5- 8.[30]赵海鸣,王猛.RV减速器静态回差分析及误差分配研究[J].天津大学学报,2016,49(2):164- 169.[31]吴俊飞,李瑰贤.机器人用变厚齿轮RV减速器回差分析与计算[J].机械设计,2000(3):24- 26.[32]吴俊飞.新型可调间隙RV减速器回差分析与实验研究[J].广州大学学报,2002(5):8- 12.[33]李蒙.中小功率壳固定RV-E型减速器的设计研究[D].哈尔滨:哈尔滨工业大学,2012.[34]张金.RV减速器传动精度的研究[D].哈尔滨:哈尔滨理工大学,2013.[35]吴永宽,郑剑云,陈天旗,等.机器人用高精度RV减速机几何回差分析[J].大连铁道学院学报,1999,20(2):24- 27.[36]徐永贤,何卫东,王洪.RV传动刚度计算方法[J].大连铁道学院学报,1999,20(2):18- 23.[37]何卫东,陆岩,吴鑫辉.基于等价模型的RV减速器扭转刚度计算[J].机械传动,2013,37(9):38- 41.[38]聂春松.RV减速器输出机构扭转刚度分析计算[J].机械设计与研究,2014,30(4):24- 26.[39]杨玉虎.RV减速器扭转刚度特性分析[J].天津大学学报,2015,48(2):111- 117.[40]李兴凯.摆线轮薄壁件加工变形研究[J].工程科技,2011(2):1- 74.[41]郑红.RV减速器摆线轮零件加工工艺设计探讨[J].价值工程,2012(23):62- 64.[42]陈姗姗.工业机器人关节用RV减速器运动学分析及关键零部件制造工艺探索[D].银川:宁夏大学,2015.[43]赵铮.工业机器人减速器RV320的修形参数优化与工艺性研究[D].天津:天津大学,2013.[44]吴俊飞.新型可调间隙RV减速器回差分析与实验研究[J].广州大学学报:自然科学版,2002(5):8- 12.[45]位云成.机器人用RV减速器传动误差的测试[J].电气与自动化,2016,45(2):167- 169.[46]朱临宇.RV减速器综合性能实验与仿真[D].天津:天津大学,2013.[47]李充宁.2K-V型摆线针轮减速机回差与刚度的试验研究[J].机械设计,2014,31(1):33- 35.[48]李瑰贤.RV30-All型变厚齿轮减速器试验研究[J].机械传动,2005,29(4):4- 8.[49]王晓玲.RV减速器综合性能测试仪的设计[D].北京:北京工业大学,2015.[50]张少芳.2K-V型减速机振动测试实验与分析[J].机械设计与制造工程,2015,44(9):81- 85.[51]齐浩然.RV精密减速器综合参数测量机的研制[J].机械传动,2016,40(6):162- 165.[52]何卫东,李力行.RV减速器样机研制及试验研究[J].大连铁道学院学报,1999,20(2):59- 64.。
RV减速器技术壁垒及行业格局分析
RV减速器技术壁垒及行业格局分析RV减速器是一种用于机械传动的重要部件,广泛应用于工业机械、自动化设备、机器人等领域。
其主要作用是将驱动轴的高速运动转换为输出轴的低速高扭矩运动。
随着高精度、高可靠性、高扭矩密度的需求不断增加,RV减速器市场迎来了快速发展。
首先,RV减速器技术具备一定的壁垒。
主要体现在以下几个方面:1.精密设计与制造能力:RV减速器的精度非常高,通常达到0.1°以下。
这要求企业具备优秀的设计和制造能力,需要掌握先进的CAD/CAM技术,以及高精度的加工设备和检测手段。
2.特殊材料与热处理工艺:RV减速器主要采用特殊材料,如高强度合金钢、钛合金等,以保证其高刚度和高扭矩密度。
同时,还需要进行特殊的热处理工艺,如渗碳、淬火等,以提高其表面硬度和耐磨性。
3.高效传动结构与精密装配技术:RV减速器采用了精密的传动结构,如星形齿轮传动、内齿环传动等,以实现高扭矩密度和高刚性。
此外,还需要进行精密的装配工艺,保证各零部件的匹配度和运转精度。
以上几个方面的技术要求和工艺难度,对企业的技术实力和制造能力提出了较高的要求,因此形成了一定的技术壁垒。
其次,RV减速器行业格局主要有以下几个方面:1.市场竞争激烈:RV减速器市场竞争非常激烈,主要分布在中国、德国、日本、美国等传动技术实力较强的国家和地区。
其中,中国是世界最大的减速器生产和消费国,拥有大量的制造企业和销售商。
德国和日本则以其高端技术和优质品质在市场上占据一定份额。
2.技术水平和品牌影响力:在RV减速器行业,技术水平和品牌影响力是企业竞争的重要因素。
拥有核心的自主知识产权、具备高精密加工设备和检测手段的企业,在市场上具有明显的优势。
同时,有良好品牌影响力和口碑的企业也能够吸引更多的客户和合作伙伴。
3.合作与创新:RV减速器行业的发展离不开合作与创新。
企业之间的技术合作和资源共享,有利于提高整个行业的技术水平和竞争力。
同时,适应市场需求的创新能力也十分关键,能够推出独特的产品和解决方案,将获得更多的市场机会。
2017年中国减速器排行-GGII

2017年中国市场工业机器人减速器竞争力排名TOP10文/高工产研机器人研究所(GGII)2017年中国工业机器人销量实现高速增长,拉动核心零部件——减速器需求量迅速上升。
据高工产研机器人研究所(GGII)调研数据显示,预计2017年中国工业机器人减速器新增需求量将有望突破33万台,同比增速超70%;预计市场规模达到25亿元左右,同比增速超60%。
图表 1 2013-2017年中国工业机器人减速器市场需求及其市场规模(万台,亿元,%)数据来源:高工产研机器人研究所(GGII)减速器紧缺,对机器人厂商产能的扩大形成一定的制约。
2017年,由于下游需求的持续扩大,工业机器人需求量暴增,进而拉动减速器需求的增长。
2017年上半年,因为减速器厂商现有产能无法满足市场需求,市场缺货现象较为普遍,对机器人厂商产能扩大造成一定的制约,缺货现象在下半年得到一定程度的缓解。
国产减速器厂商进步明显,国内入局者将增多。
2017年,国产主要减速器厂商销量增长明显,几乎都实现了翻番,但因为市场定位及产品性能方面的因素,呈量增价减的趋势。
根据GGII调研显示,基于市场的旺盛需求和自身成本的考量,不少厂商已开始切入减速器领域,预计未来中国市场减速器入局者将进一步增多,产品价格将加快下行速度,进而促使到机器人成本的进一步降低。
高工产研机器人研究所(GGII)结合中国市场机器人减速器企业的产业布局以及综合实力等因素,盘点出2017年中国市场最具竞争力的机器人减速器TOP 10企业(6家RV和5家谐波企业)。
图表 2 中国市场工业机器人减速器竞争力TOP 10资料来源:高工产研机器人研究所(GGII)评选方法:根据评选对象2017年企业市场销量情况(60%)、综合研发实力(40%)维度综合考量排名。
RV减速器:NO.1、纳博特斯克纳博特斯克由帝人精机株式会社和纳博克株式会社2003年合并而来,是全球最大的精密摆线针轮减速机制造商,自1986年由垂井工厂开始投入量产以来,截至2017年年底已累计生产精密RV减速器超700万台。
RV减速器传动精度及固有特性研究
RV减速器传动精度及固有特性研究工业是一个国家发展的重要基础,随着科技的进步与发展,工业机器人在工业生产制造领域中的应用越来越广,工业机器人的应用能够有效地提高工业生产的效率及质量.相较于国外工业机器人的发展,我国工业机器人起步较晚,对于工业机器人中的一些核心部件都需要进口.随着智能化和数字化的到来,工业机器人已经逐渐应用于国家发展的各个领域.减速器是影响工业机器人质量和水平的重要部件,也标志着一个国家的工业发展水平.精密齿轮RV系列是机床、工厂机器人、装配设备、输送机等需要精密定位、高刚度、高冲击负荷能力的相关领域精密机械控制的理想减速器.2 RV减速器的结构RV减速器是由行星齿轮传动和行星摆线传动组成的两级减速传动机构,由于其由中心圆盘支撑的封闭、超静定和组合行星传动机构,具有传动比大、体积小、刚度大、承载能力大、传动效率高和传动精度高等突出优点,广泛应用于工业机器人关节驱动装置中,它的结构简图如下图2-1所示.RV减速器的摆线齿轮以相反的方向绕其自身轴线转动输入旋转的角度,因为轴具有一体化结构.摆线减速器包含由销或行星齿轮组成的内齿轮,对减速器系统产生双速减速效果,最近已在机器人中流行起来.这是因为它们可以产生比相同尺寸的普通摆线减速器更大的减速率,普通摆線减速器通过将摆线齿轮运动直接平移通过输入偏心轴来减速.RV减速器的结构基于其传动原理和结构特点,包括摆线齿轮、销齿轮箱、销齿轮、曲轴和轴承孔等部件.为了提高装配精度,必须进行高精度加工,因此RV减速器通常成本和销售价格都很高.下面RV减速器的主要零部件进行说明:2.1 输入齿轮轴在摆线针轮减速器的理想设计中,输入齿轮的齿形可以与风轮上的所有销齿接触,其中一半的销齿参与载荷传递.同时,摆线齿轮上的输出孔可以与输出盘上的所有销保持接触,并且输出销的一半传递负载.2.2 渐开线行星轮行星轮以齿轮轴为中心互成120°对称安装,与输入齿轮轴相啮合,输入齿轮轴转动带动三个行星轮以同样的速度转动,通过梯形键与曲柄轴固联,带动曲柄轴一起转动,进而完成RV减速器的第一级减速任务.复合行星齿轮的装配条件比简单的行星齿轮更严格,而且它们必须以相对正确的初始方向装配,否则它们的齿不能同时与行星两端的太阳轮和环形齿轮啮合,复合行星齿轮能以相同或更小的体积容易获得更大的传动比.2.3 曲柄轴三个曲柄轴分别通过梯形键与三个行星轮相对应联接固定在一起,在进行转速求解时将两者看成一个整体,通过安装在曲柄轴偏心部分上的圆柱滚子轴承,将动力传递给摆线轮,作为RV 减速器第二级减速的输入部分.2.4 摆线轮两摆线轮对称分布,相位差180°,与曲柄轴通过圆柱滚子轴承相接触,绕输入齿轮轴轴线做偏心转动,在输入扭矩的作用下,零件的运动方向为角正方向,等效位移的正方向为每个零件的运动方向.2.5 行星架以轴线为中心,行星架和输出盘成120°对称分布,曲柄轴通过圆锥滚子轴承与行星架相联接,行星架为行星轮和曲柄轴的转动起支撑作用,同时随曲柄轴绕输入齿轮轴轴线做公转转动.2.6 输出盘输出盘与第一级的固定环形齿轮的壳体滚子接触,并且能够围绕其自身的轴自由旋转.中心圆盘沿与输入轴相反的方向旋转,可以围绕轴轴线自由旋转,输出盘不动,壳体反过来提供输出动力进行输出,实现RV减速器二级减速.2.7 壳体壳体的作用是承载各零部件,此外还可作为输出端:当输出盘与行星架固定式时,壳体则作为输出机构进行输出转动,进而完成RV减速器目标二级减速任务.3 RV传动原理及其特点3.1 RV减速器的传动原理RV减速器传动过程首先通过输入齿轮轴输入动力,与一级渐开线行星轮的啮合传动来实现第一次减速;行星轮在曲柄轴上固定,从而带动曲柄轴绕中心轮公转,同时进行自转带动摆线轮;摆线轮与针齿轮做啮合转动时,通过反馈带动曲柄轴将传动行星架和输入盘.随着摆线盘的旋转,与组件的其它减速部件发生两个接触点.首先,盘的外表面相对于环形齿轮箱的辊子滑动,其次,盘的旋转运动与低速轴的辊子相互作用.摆线盘本身以与高速轴相反的方向旋转,同时,盘的外边缘上的凸起逐渐与连接到环形齿轮箱内周的辊子接合.这种相互作用以降低的速度产生反向旋转.对于高速轴的每一次完整旋转,摆线盘以相反的方向旋转一个摆线齿长.通常,圆盘周围的摆线齿比固定环形齿轮壳体中的销少一个,导致实际减速比等于圆盘上摆线齿数,摆线盘的减小的旋转通过与盘内包含的孔接合的驱动销和辊传递到低速轴.随着同时承受接触和传递载荷的滚子(齿)数量的增加,最大应力值减小,提供了更大的扭矩传递能力,并提供了异常平稳、无振动的驱动,这种系统通常包括两个圆盘和一个双偏心凸轮.对于具有相应较小扭矩容量的较小单元尺寸,可以使用由单个偏心凸轮驱动的单个盘系统.壳体固定的情况下,输入齿轮轴(1)提供动力,通过输出盘-6输出动力,假如齿轮轴(1)顺时针转动,行星轮(2)与曲柄轴(3)为整体,一边绕输入齿轮轴(4)的轴线公转,同时以逆时针方向自转完成高速段第一次减速,主减速器一是改变动力传动的方向,二是作为传动的延伸,为每个齿轮提供共同的传动比.曲柄轴(3)的转动作为二级减速的转动输入,曲柄轴(3)与摆线轮(4)接触后将动力传递给摆线轮(4),之后摆线轮与针齿轮(5)做内啮合式的滚动摩擦反馈给曲柄轴(3),带动曲柄轴(3)一起绕输入齿轮轴(1)的轴线做以顺时针为方向的公转完成二级减速;曲柄轴(3)分别与行星架(7)和输出盘(5)相接,曲柄轴绕输入齿轮轴(1)的做以顺时针为方向公转的同时,行星架(7)和输出盘(6)也随曲柄轴一起做绕输入齿轮轴(1)的轴线的顺时针转动作为最终输出转速,输出转速与输入转速的比值即为RV减速器传动比.RV减速器的传动简图如图3-1所示.3.2 RV减速器的传动特点RV减速器采用两级摆线设计,具有高传动比、高扭矩和强的冲击负荷能力,采用滚动接触元件,减少磨损,延长使用寿命.同时,RV减速器由于独特的针齿结构的摆线设计,具有低齿隙的特点,与传统减速器相比,具有更高的精度和抗冲击性.RV减速器由大的内部角支撑轴承组成,这些轴承提供大的力矩能力,并且不需要外部支撑装置.RV减速器由于集成角支承轴承,具有刚度高、承受外力矩能力强、无需外力支承的特点,不仅减少了零部件数量,而且节省了成本,也增加了操作的可靠性.摆线轮和针轮啮合力的影响程度由大到小依次为摆线轮齿数、短振幅系数和针齿中心半径,针齿半径相对较小.在RV减速器传动中,核心传动部分为摆线针轮传动,而核心传动部分为摆线针轮传动,其精度直接影响RV减速器的传动精度、稳定性乃至整体性能.减速器的摆线针齿是100%的连续接触,保证极低的侧隙和高的冲击负荷能力,由于两个摆线齿轮的低速旋转,两级减速机构能够减小振动,同时由于减小了输入耦合尺寸而减小了惯性.RV减速器也有各种各样的比率,可以通过在第一阶段的直齿轮组合得到,在整RV减速器中使用滚动接触部件有助于出色的启动效率、低侧隙、低磨损和长的使用寿命.传动误差反映了输入轴和输出轴之间的角传动精度,当输入齿轮固定时,指定扭矩沿两个方向施加到输出轴上,并且测量弹性.在零负载(死点)时,滞回区上下边界映射之间的距离-φ最大为1弧分钟.机器人RV减速器还提供了多齿啮合,同时,平衡双圆盘结构的偏置振动、高重叠系数以及具有适当间隙的滚子接触,以避免齿轮干涉,从而有效降低噪音和振动.RV减速器采用滚动接触元件设计独特的针摆线轮齿,有利于减少磨损,减小间隙,使其比传统减速机具有更强的抗沖击性能,并进一步减小间隙.RV减速器具有承载大的内部轴承,以实现更大的承载能力,从而降低外部支撑设备的要求,从而减少设计时间和安装成本.真正的对称齿轮设计,以及所有的轴滚珠轴承支撑,保证了恒定性能的使用周期,并允许在短时间内达到额定峰值扭矩的5倍.4 RV减速器传动精度的分析与控制RV减速器以精密运动控制专用的平板为中心的减速器,具有结构紧凑、重量轻、刚度高等特点,其强度足以抵抗过载情况.此外,自由间隙、微转动振动和低惯量的优点保证了快速加速度、超精密定位和平滑运动.在理论上,RV减速器摆线盘的所有齿都与环形齿轮的相应滚子接触,其中一半传递载荷.然而,实际情况并非如此,因为环形齿轮的滚子和摆线盘的齿之间存在一定的间隙,以便补偿摆线盘制造过程中产生的误差,为润滑提供更好的条件,实现减速器的更容易组装和拆卸等等.这些间隙的大小直接影响摆线盘齿和齿圈辊之间接触时出现的接触力的分布,意味着随着间隙尺寸的增加,传递载荷的相应元件的数量正在减少.摆线盘与齿圈和输出辊接触,接触力的值取决于间隙的大小,即传递载荷的摆线盘齿(环形齿轮的滚子)的数量.第一级行星齿轮由输入轴、中心论、行星轮等部分构成.摆线针轮传动由曲柄轴、摆线轮、针轮等部分构成.RV减速器的偏心轴与输出轴连接,保证了偏心轴与针齿壳同步转动,其输出轴和输入轴是一条直线,结构得到了加强,节省了空间,因此在相同的齿轮减速器和蜗杆减速器减速比下,RV减速器尺寸更加紧凑.RV减速器二级减速的摆线针轮减速部分输出速度就是RV减速器经过减速所最后输出的速度,机器人专用RV减速器对驱动精度、承载能力要求很高.齿隙是影响精度的重要指标之一.RV减速器设计中必须严格控制齿隙.齿隙会导致输出轴和输入轴之间在短时间内失去轨迹.将产生输出中断.RV减速器传动过程中存在输出损耗.运动传递关系变得非线性.此外,齿隙也会影响反馈控制系统和动态品质.因此,RV减速器的齿隙必须要严格的控制,才能保证减速器的正常动力传动要求.目前机器人可使用的许多类型的减速器中,通常都使用平面齿轮减速器和谐波驱动器.摆线减速器(RV减速器)是当今使用的最常见类型的平心齿轮减速器.摆线传动从20世纪30年代到现在一直是受欢迎的减速器,因为与行星齿轮系相比,它体积小、重量轻、速度快,并且在单个阶段具有很高的机械优势.然而,由于加工过程中的变化,摆线驱动器中存在齿隙,将降低稳定性以及固有噪声和振动,特别是在高速时.大多数用于自动化制造的机器人都使用谐波驱动器来驱动上两个机器人或者三个接头和摆线减速器.在全尺寸机器人中,摆线减速器用于所有六个关节.谐波减速器和摆线减速器即使在一个阶段也能表现出显著的减速比,并且由于它们的齿数比很大,即使在小尺寸时也能传递大扭矩;因此,它们主要用于需要紧凑结构、大负载能力和高精度位置控制的机器人.这些减速器越来越专门用于测量齿形制造技术和装配技能等应用.随着半导体制造和航天工业等领域对高功能的需求不断增加,从满足用户需求的角度来看,摆线和谐波减速器有望继续发展.5 结语随着制造自动化,机器人越来越多地从事人类工作.因此,使用精密减速器对于实现机器人手臂位置的精确控制变得至关重要.曲线齿廓,如摆线或渐开线齿廓,通常用于精密减速器,RV减速器能够实现高精度控制,广泛用于操纵机器人系统.本文在分析RV减速器结构的基础上对RV减速器传动特性,传动精度进行简要介绍,以供参考.。
国内外知名减速器品牌[1]
![国内外知名减速器品牌[1]](https://img.taocdn.com/s3/m/bf58f7d676a20029bd642ddb.png)
国内外知名减速器品牌
德国品牌主要有:阿尔法\斯德博\纽卡特\SEW\弗兰德...德国品牌基本都是高品质,高精度,主要应用于高端行业\高端市场
日本品牌主要有:新宝\住友,其中星宝是行星减速机,住友是做滚柱式减速机的.在机械手行业,新宝占据绝对优势.(国内有工厂)
台湾品牌就多了,主要如下:
1-VGM聚盛,台湾最老的牌子,但在精度上比不上APEX和PHT以及晶桀SUNUS,其代理商在大陆有三家:分别是东莞(上海)、深圳、苏州。
2-APEX精锐广用,一直走高端市场,品质相当不错,在印刷机行业的竞争力最大, 3-PHT品宏,品质也不错,在中高端\中端\中低端市场占据相当的份额,在09年专门针对机械手研发的SX070上市后,推出的产品在机械手行业一起步就获得好评,其代理商在大陆只有三家:东莞富宝、上海丽非、深圳永紘
4-晶桀SUNUS,.在国内也占据相当的市场份额,主要在机床,机械手上应用比较多,其大扭矩行星式减速机是其他厂牌所不具有的。
5-利明,品质感觉一般,但总比国内的好,呵呵
6-世协,在国内推广的不怎么样,品质与利明差不多
7-东利,东利的减速机结构与新宝的差不多,前身是新宝的代理商
8-精工
9-鼎镒
10-柯泰(滚柱式减速机,目前国内华南地区只有东莞的富宝机电的一家在推、华北也有家不怎么出名的贸易公司恒天焦作商贸--
国内品牌,国内做得最好的减速机应该就是湖北行星了,湖北行星有着强大的资本做研发和推广,而且品质做得也还可以,另外就是纽氏达特了.
注:有一款叫托玛斯的减速机,号称是美国制造的,实际上这是台湾精工的一个产品.特点短\小,但这同时也是致命伤,这导致受力面小,承压力不够。
RV-N中文版

RVTM 更进一步升级!! 小小的 N 将带来无限可能性!!
工业用机器人 (垂直多关节)的关 节用途占世界市场的
60% (本公司调查)
全新机型 RV N SERIES 以拥有 400 万台出货 成绩的减速机 RV 为基础,进一步紧凑化、 轻量化后诞生而来,拥有可应用于工业机器 人的强大功能。
R 转速比
轴旋转
41 81 323/3 126 137 2133/13 41 81 105 126 141 2133/13 41 81 1737/17 121 1893/13 161 41 81 101 129 141 171 41 81 1737/17 121 141 161 41 81 1737/17 121 1893/13 161 41 81 1131/11 2379/19 156 201 75 93 117 139 162 185 81 105 123 144 159 192.75 105 118 142.44 159 183 3867/19
700
105,118,142.44,159,183,203.52
※ 想了解本型号的相关事项请咨询本公司。
输入齿轮代码
A: 标准品 A B: 标准品 B Z: 特殊及无
参见 p.36,37
外形尺寸图 P.10 P.11 P.12 P.13 P.14 P.15 P.16 P.17 P.18 P.19
110
1.0
52
100
1.0
44
94
1.0
40
88
1.0
35
83
1.0
35
79
1.0
19
48
1.0
11.5
减速机工作原理及常见故障排查

减速机工作原理及常见故障排查减速器一般用于低转速大扭矩的传动设备,把电动机、内燃机或其它高速运转的动力通过减速机的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的,普通的减速机也会有几对相同原理齿轮达到理想的减速效果,大小齿轮的齿数之比,就是传动比.当提及国产机器人精度不够,机器人寿命短的问题,大家可能都会埋怨我们的国产减速机不够,有人说我们国产减速机精度不够,寿命时间短,总之问题出现了一大堆。
可为什么国产机器人用的减速机跟四大家族的一模一样,但是装出来的效果就是比四大家族的差呢?其实问题不光来自减速机,比如装配,系统都会出现问题,今天就让小编来教给大家如何辨别减速机的优劣。
减速机原理解析01RV减速机RV减速机是蜗轮蜗杆减速机家族中比较常见的减速机之一,它由蜗杆和蜗轮组成,具有结构紧凑,传动比大,以及在一定条件下具有自锁功能的传动机械,是最常用的减速机之一而且振动小,噪音低,能耗低。
工作原理:RV减速机一般用于低转速大扭矩的传动设备,把电动机、内燃机或其它高速运转的动力通过减速机的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的,普通的减速机也会有几对相同原理齿轮达到理想的减速效果,大小齿轮的齿数之比,就是传动比。
减速机是一种动力传达机构,利用齿轮的速度转换器,将马达的回转数减速到所要的回转数,并得到较大转矩的机构。
普遍认为机器人行业的RV三巨头是帝人、住友、SPINEA,强调机器人界是因为有些减速机也很厉害,但并没有广泛应用在机器人行业,比如柴埃浮,减速机的性能跟精度也十分高,但是主要应用在高端机床上,工业机器人行业并没有多少。
02谐波减速机用于负载小的工业机器人或大型机器人末端几个轴,谐波减速器是谐波传动装置的一种,谐波传动装置包括谐波加速器和谐波减速器。
谐波减速器主要包括:刚轮、柔轮、轴承和波发生器三者,四者缺一不可。
其中,刚轮的齿数略大于柔轮的齿数。
谐波减速机用于小型机器人特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。
住友减速机资料ppt课件

2
住友重机械工业株式会社的历史:
• 住友重机械工业株式会社创建于1888年,最初是为修理矿山机械而成立。 • 1934年正式设立住友机械制作株式会社。 • 在日本经济高速发展期开始从事生产减速机、制铁机械及各种起重机械等运输机械。 • 1969年兼并浦贺重工业,开始生产化学机械和成套设备机械。 • 改名为住友重机械工业(株)。还开始生产塑料加工机械及激 光加工系统和半导体。
目前住友重机械减速机(PTC),在世界50个国家,有9个制造中心,18个专业制 造厂和35个装配厂,226个办事处。
住友减速机资料
5
变减速机事业介绍
营业额: 约700億円 海外:国内=40% : 60%
欧洲
加拿大
北美,南美
世界50个国家 9个制造中心 35个装配厂 226个办事处
东南亚
台 湾
日
住友减速机资料
本
欧洲
韩 国
中
国
6
住友重机械减速机(中国)有限公司
住友重机早在上世纪70年代,就开始向中国提供成套及配套产品,仅在上海宝钢集 团、武钢集团热轧厂、冷轧厂、硅钢厂都可以看见不少于500台 住友减速机安全的运行了30年。
住友中国公司从1994年成立,开始了在中国的投资,致力于向中国客户提供优 质的减 速机产品及服务。
综合重机械
住友减速机资料
3
住友重机械减速机(PTC)是住友重机的核心机构
作为日本有代表性的综合机械制造厂商之一,不单生产减 速机,而且长期从事制造钢铁冶金设备、起重、运输机械、 化工机械及其它各种机械设备。
住友减速机资料
4
住友重机械减速机(PTC)的历史:
• 从1888年住友重机械成立,便开始了电动机及减速机的自行制造生产。 • 1911年为别子矿山生产了3.7KW直流电动机。 • 1938年与德国Cyclo公司(现Sumitomo(SHI)Cyclo Drive Europe.Ltd)展开技术合作。 • 1939年开始生产Cyclo系列减速机,这也是PTC集团的前身。 • 随后开始发展各类型齿轮减速机。 • 1966年在美国建立了第一家海外工厂,开始了大规模的海外投资。 • 1994年开始了在中国的投资,建立了PTC天津专业制造厂。
全球最具影响力的十大减速机品牌!
全球最具影响力的十大减速机品牌!近年,中国各地掀起了机器人产业大潮,但与外国机器人相比竞争力差距很大,尤其是机器人的零部件,目前大多数国内机器人的零部件都是进口的。
机器人零部件主要由伺服运动控制、减速机等组成,在减速机方面目前国内的上海电机和秦川发展两家企业开始投入研发,以下盘点一下全球最有影响力的十家减速机品牌,日本有4家企业上榜,难怪在机器人行业有这么一句话:全球机器人的关节用到的精密减速机几乎都是日本造的,日本人说跪,全球机器人没几个能站着。
01日本帝人减速机(Nabtesco)日本帝人公司(纳博特斯克(Nabtesco))是一家居世界领先地位的精密传动控制系统及组件制造商。
帝人精密减速机在对减速机有特殊要求的行业尽显技术优势,其中RV系列在机器人行业应用中处于非常大的领先地位,而其后推出的RD系列是在拥有世界机器人市场上使用超过200万台骄人业绩的RV系列减速机基础上进行改良,使其使用上更加方便容易。
帝人NabtescoRVRDRA系列减速机具有高可靠性、高刚性、高精度比、转矩大、轴向尺寸小等特点,为了直接支持较大载荷,内部装有大型角接触球轴承,采用双支撑支持机构和针轮机构,即使施加高达五倍额定转矩时,产品也不会损坏。
帝人NabtescoRVRDRA系列减速机特别适用于频繁正反转,对精度和刚度有高要求,对轴向尺寸要求短的行业领域。
Nabtesco製造RV减速器具有长期使用不需再加润滑剂、寿命长、刚度好、减速比大、低振动、高精度、保养便利等优点,适用于在机器人上使用。
其它运用,如:工业机器人、机械臂、码垛机器人、焊接变位台(翻转台)、精密包装机械、工具机(CNC车床、综合切削加工机、刀库、刀塔)、半导体製造、精密雷达驱动控制医疗设备、太阳能设备等要求空间小、速比大的精密传动行业。
02 日本住友减速机(SUMITOMO)SUMITOMO是拥有400多年历史的世界500强之一的住友集团旗下的建设机械厂家,在世界范围享有盛誉。
机械设备周报:RV减速器国产化:山雨欲来风满楼
[Table_ReportType][Table_StockAndRank][Table_Author]+86 61678586********************131****1826**********************91 100031[Table_Title]RV 减速器国产化:山雨欲来风满楼[Table_ReportDate]2021年1月3日[Table_Summa [Table_Summary] 本周专题:随着全球机器人销量的增长,对RV 减速器的需求也在逐步提升。
根据我们测算,目前,全球机器人RV 减速器需求为110.2万台,假设单台RV 减速器价格为6000元,则全球机器人RV 减速器的市场规模约为66.12亿元。
我国机器人RV 减速器需求约为38.68万台,市场规模约为23.21亿元,至2024年我国机器人用RV 减速器需求有望达到71.21万台,对应的市场规模有望达到42.73亿元。
目前我国RV 减速器大部分市场份额仍旧被纳博特斯克、住友重机、Spinea 、赛劲(SEJIN)等外资企业占据,其中纳博特斯克在我国RV 减速器的市占率达到60%左右。
近年来,南通振康、双环传动、中大力德、秦川机床等国产RV 减速器企业正在逐步崛起,收入规模也保持快速增长,2019年双环传动和中大力德减速器收入分别为1.23亿元和1.89亿元,同比增速分别为95.92%和26.0%。
同时,根据我们草根调研,2020年双环传动等国产减速器销量依旧保持快速增长。
我们认为未来我国RV 减速器仍将伴随机器人需求快速增长,同时,随着双环传动等国产RV 减速器企业技术的逐步突破,未来进口替代有望持续加速。
本周核心观点:(1)全面把握高端制造、智能制造主题,围绕工业装备数字化、工业互联自动化的大方向优选标的。
重点推荐工业机器人国产龙头品牌埃斯顿、工业控制装置优势品种川仪股份,激光产业用控制系统柏楚电子、重点关注DCS 龙头并切入工业软件体系的中控技术、关注工业自动化链条上优质标的埃夫特、汇川技术、绿的谐波等;(2)继续选择成长空间明确的主流赛道,优选竞争优势持续夯实的优质公司:光伏设备领域,工艺迭代呈现加速趋势,高成长的贝塔叠加工艺更迭带动的设备更替需求,捷佳伟创等公司我们是持续推荐;锂电设备处在行业扩容的大赛道上,行业景气度抬升,设备公司具备贝塔属性,持续关注克来机电、先导智能、诺力股份等;核电领域,华龙一号全球首堆——中核集团福清核电5号机组首次并网成功,核电预期升温,2019年以来持续批复新增机组,且核心零部件国产化加速,重点推荐江苏神通、中密控股;(3)受益监管政策强化,多个细分行业迎来行业空间扩容机遇,消防监管政策强化带动消防设施需求提升,重点推荐青鸟消防;受益建筑安全领域政策强化,建议关注减隔震行业,关注震安科技;受益国内安全生产政策执行力度强化,建议关注防爆电器行业,重点关注华荣股份;(4)工业制造业需求持续复苏,11月工业企业利润同比增加15.5%,在通用设备领域继续优选优质品种,重点关注锐科激光、安徽合力、国茂股份等;(5)考虑细分赛道上的长期稳定性和成长性,继续重点推荐广电计量,关注华测检测、安车检测、捷昌驱动等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
295 0.15 445 0.15 295 0.32 445 0.32 595 0.32 295 0.42 445 0.42 595 0.42 295 0.59 445 0.59 595 0.59 295 1.15 445 1.15 595 1.15
226 23.0 201 20.5 487 49.7 433 44.1 396 40.4 635 64.8 565 57.6 517 52.7 899 91.7 798 81.4 732 74.6 1756 179 1562 159 1431 146
373
2670 1.59
3560 1.95
41.4
38.0
4550 3800 1900
3.96 15.85
372 3570 1.46
37.9
3.95 15.81
650
596
557
1770 2.55
2360 3.12
2950 3.65
66.2
60.8
56.8
4.93 19.71
574 2670 2.25
• 初始填充润滑脂时,请从下面的排脂孔加注,以确保润滑脂循环。
• 每运行 20,000 小时或每 3 ~ 5 年更换一次润滑脂。
图 D-17
表 D-20 F4CF-D 系列推荐润滑脂 推荐润滑脂名称
Multemp FZ No.00 环境温度: -10℃〜 40℃
供应商 协同油脂
垂直①
表 D-21
机座号
145
133
124
117
0.37
2670 0.57
3560 0.69
4450 0.81
5340 0.92
14.7
13.5
12.6
12.0
1.50
353
323
302
286
1.55
1770 1.38
2360 1.69
2950 1.98
3540 2.25
35.9
33.0
30.8
29.2
6.19
311
285
容许最大输出转速 (r/min)
50% 100% ED ED
高速轴换算 上 / 惯性矩 (×10-4kg•m2) 下 /GD2 (×10-4kgf•m2)
163
150
140
133
0.38
1770 0.64
2360 0.78
2950 0.92
3540 1.04
16.6
15.3
14.3
13.5
1.52
6150 5600 2800
w2 = 1 ... 式 2 w1 P 如果将 S-P=2 应用于式 1,则速度比可从下式算出。
图 D-5 等速内齿轮结构
w2 = 2 ... 式 3 w1 P
当曲柄以角速度 ω1 绕恒星齿轮的轴线旋转时,行星齿轮将以 下述角速度旋转:
1w1
2w1
- P 或- P
图 D-6 CYCLO® 减速机结构模型
非保修项目
凡涉及以下情况者 , 均不在保修范围以内。 1. 本产品的安装,与其他装置的连接不当所引起的故障。 2. 对本产品的保管未实施本公司规定的保管要领书中的要领,对维修管理不严格,未正确操作而引起的故障。 3. 规格以外的运转,或者其他在本公司不知的运转条件、使用状态下引起的故障,或者使用并非本公司推荐的润滑油引起的故障。 4. 用户连接的装置缺陷或者特殊规格引起的故障。 5. 改造本产品或者变更结构而引起的故障。 6. 用户提供的零件或指定的零件的缺陷而引起的故障。 7. 地震、火灾、水灾、盐害、煤气灾害、雷击、其他不可抗力所引起的故障。 8. 即使采用正常的使用方法,轴承、油封等消耗品的自然消耗,磨损、老化等有关该消耗品的保修。 9. 其他不属于本公司责任范围的事项引起的故障。
590 0.30 890 0.26 590 0.64 890 0.57 1190 0.52 590 0.84 890 0.74 1190 0.68 590 1.18 890 1.05 1190 0.96 590 2.31 890 2.04 1190 1.87
201 20.5 178 18.1 434 44.2 383 39.0 351 35.8 566 57.7 500 51.0 458 46.7 800 81.6 707 72.1 648 66.1 1565 160 1383 141 1267 129
输出转速(r/min)
5
10
15
20
25
机座号 D15 D25 D30 D35 D45
减速比
59 89 59 89 119 59 89 119 59 89 119 59 89 119
额定输出转矩 输入转速 (上 /N·m) (下 /kgf·m)(r/min)
容许输入 功率
(kW)
额定输出转矩 输入转速 (上 /N·m) (下 /kgf·m)(r/min)
2670 1.22
3560 1.49
31.7
29.1
1.54 5050 4200 2100
6.15
285
1.53
3570 1.12
29.1
6.12
460
422
394
373
1770 1.81
2360 2.21
2950 2.58
3540 2.93
46.9
43.0
40.2
38.1
3.99 15.96
406
容许输入 功率 (kW)
((额下上定//输kNg出·f·转mm矩))(输r入/m转in速)
容许输入 功率
(kW)
额定输出转矩 输入转速 (上 /N·m) (下 /kgf·m)(r/min)
容许输入 功率
(kW)
((额下上定//输kNg出·f·转mm矩))(输r入/m转in速)
容许输入 功率
(kW)
226 23.0 226 23.0 487 49.7 487 49.7 487 49.7 635 64.8 635 64.8 635 64.8 899 92 899 92 899 91.7 1756 179 1756 179 1756 179
58.5
3950 3300 1650
4.89 19.55
4.87
19.50
1271
1166
1770 4.99
2360 6.11
130
1150 2600 1300
12.41 49.65
12.38
49.52
#:50%ED
#: 100% ED
Mass (kg) 5.2 8.1
11
15
24
注: 1. 额定输出转矩
额定输出转矩用输出轴上平均负载力矩的容许值表示。 对应 600r/min 以下的输入转速的额定转矩与 600r/min 时的额定转矩相同。 容许输入功率是 100% 额定转矩时所需输入量。 该值考虑了 FINE CYCLO® 的效率。 2. 容许最高输入转速与容许平均输入转速 虽然可以在容许最高输入转速的范围内使用,但容许平均输入转速受到运行比的限制。 3. 容许加减速峰值转矩 正常启动和停止时在输出轴上的容许峰值转矩。 4. 容许瞬间最大转矩 非正常停止时,或受到外部冲击等在输出轴上的瞬间最大容许负载转矩值。这样的值在整个寿命中只出现 1000 次。 5. 转动惯量,GD2 各型号高速轴上的惯性矩以及 GD2 的值,当用惯量来换算时,惯性矩用 g(转动惯量:9.8m/sec2)、GD2 用 4g (转动惯量:4×9.8m/sec2)去除。 6. 若速度未显示在上表中,则使用下述公式计算额定转矩。
24
2
1. 结构
图 D-1
2. 应用示例
3
3. 型号规格表示
F 4C F S — D15 — 59
标准:特殊规格:S
机座号
针齿壳外形 圆柱型 :带法兰型 :F
4C(带角接触球轴承的输出轴)
机型代号
减速比
4. 产品构成
机座号
D15 D25 D30 D35 D45
减速比
标记●: 产品线
59
89
119
保修
本公司提供产品的保修范围仅限于本公司生产的产品。 保修(期限与内容)
保修期限 仅限于新品 , 在出厂后 18 个月或运转后 12 个月内,以其中时间较短的一方为保修期限。
保修范围
在保修期内,按照使用说明书的要求正确安装,连接并进行维修管理;按照产品目录上记载的规格或在另行协商的条件下进行 正常运转的,除了下列情况外,经本公司判断,无偿进行修理或更换。 但是,将本产品与用户的其他装置等连接时,从该装置卸下以及安装所附带的施工费用、运输费用以及对用户发生的机会损失, 作业损失、其他间接损失均不提供补偿。
1180 0.48 1780 0.43 1180 1.04 1780 0.92 2380 0.84 1180 1.36 1780 1.20 2380 1.10 1180 1.92 1780 1.70 2380 1.56 1180 3.76 1780 3.32 2380 3.04
172 17.6 153 15.6 372 38.0 329 33.5 301 30.7 486 49.5 429 43.7 393 40.1 686 70.0 607 61.8 556 56.7 1343 137 1180 121
5
11-4. 润滑
• F4CF-D 系列出厂前已将润滑脂排空。 用户必须准备并加注适量(表 D-21)所推荐的润滑脂(表 D-20)。
• 表 D-21 规定的填充量仅为大致用量,在实际填充时请注意填充程度。
• 输出一侧的给、排脂孔位置应与偏心行星轴轴承位置一致(参见图 D-17,表 D-20 所示尺寸)。