丘陵山区双履带式小型动力底盘的设计_杜蒙蒙
履带式工程机械底盘检测系统的研制

对履 带式 工 程机 械 的 发 动机 、传 动 系统 、液 压 系统 等 检 测平 台设计 为 固定 测 功平 台和 移 动测 功平 台两 个
重要零 部 件 的性 能检 测 ,该 种方 式往 往需要 将履 带式 部 分 ,移 动测 功平 台安 装 在 滑 轨装 置 上 ,通 过 液 压 缸
工业控制计算机
l
f
f
J
i模拟信号采集卡l 冲信号采集卡l畦电器输出控制
f
f
I
『
牍抱H膏号采集盘 申l言鞣 崾}I继电器 0 J ]子6R^7o直流调脚
图 3 计算机测控 系统 总体结 构
4.1 工控机 及传 感器 履 带 式 工 程 机 械 底 盘 检 测 系 统 采 用 研 华 IPC一
· l69 ·
检测与控制
2012年第2期 (总第118期)·机 械 研究 与应 用 ·
计 算 机 测控 系 统 包 括 工控 机 、传 感 器 、数据 采集 卡、RS232串行通信卡 以及软件等部分 ,完成检 测平 台 的调整 、转 矩转 速 信 号 的采 集 处 理 、加 载 控制 等功 能 。进行 履 带式 工程 机 械底 盘动 力性 能检 测 时 ,计算 机 测 控 系统 对整 个试 验 过程进 行 监控 ,实 时显示 各种 试 验 数据 ,并 将 这些 参数 储存 到 数据库 中。辅 助装 置 包括 挡块 、锁紧装 置 、液压 站 、LED灯 屏 、打 印机 等设 备 ,这些 设 备是 整个 检测 系统 完 成正 常功 能必 不可少 的组 成 部分 。 3 检测 平台 3.1 路 面 模 拟装 置
方式 有路 试 法 和 台架 测 试 两种 形 式 。路 试 法 需 要专 用履带 结构 ,以适应 履带 式工 程机 械行走 装 置接 地 面
丘陵地区经济林内动力底盘研究现状分析

第47卷第12期 林业机械与木工设备Vol 47 No. 122019 年 12 月FORESTRY MACHINERY & WOODWORKING EQUIPMENT Nov. 2019综 述丘陵地区经济林内动力底盘研究现状分析汤晶宇",寇 欣",徐克生吴 昊",曲振兴",王德柱",樊 涛V(1.国家林业和草原局哈尔滨林业机械研究所,黑龙江 哈尔滨150086;2.国家林业和草原局林业机电工程实验室,黑龙江哈尔滨150086)摘要:介绍分析几种适用于南方丘陵地区经济林地形的履带式动力底盘和轮式动力底盘,对不同动力 底盘的结构、工作原理、驱动形式、越障能力、转向结构和运行平稳性进行分析,归纳当前经济林内动力底盘的研究发展现状以及主要研究方向,展望未来发展趋势,为丘陵地区动力底盘的设计提供一定参考。
关键词:丘陵地区;经济林;动力底盘;履带式;轮式中图分类号:S776文献标识码:A 文章编号:2095 -2953(2019)12 -0004 -05Analysis of Research Status of Power Chassis in Economic Forest in Hilly AreaTANG Jing-yu 12, KOU Xin 12, XU Ke-sheng 12 * , WU Hao 12QU Zhen-xing 12, WANG De-zhu 12, FAN Tao 12收稿日期=2019-06-19基金项目:国家重点研发计划项目"智能化油料作物收获技术与装备研发"(2016YFD0702100)。
第一作者简介:汤晶宇(1980 -),男,研究员,硕士,主要从事营林机械技术装备及其智能化的理论与应用研究,E-mail :hljtjy@ 163. com o*通讯作者:徐克生(1964-),男,研究员,硕士,研究方向为森林工程技术装备研究设计、林业安全工程研究,E-mail :lyldaq@ 163. com o(1. Harbin Research Institute of Forestry Machinery ,State Forestry and Grassland Administration ,Harbin Heilongjiang 150086,China ;2. Forestry Electrical and Mechanical Engineering Lab of State Forestry and GrasslandAdministration ,Harbin Heilongjiang 150086,China)Abstract : Several kinds of caterpillar power chasses and wheel-type power chasses that are applicable to the econom ic forest terrain in southern hilly areas are introduced in this paper , the structures , drive forms , obstacle-crossing capa bility ,steering structures and operation smoothness of different power chasses are analyzed , the current research anddevelopment status of power chasses in economic forests and main research direction are summed up and the prospect of future development trend is presented , which can provide certain reference for the design of dynamic chasses in hilly areas.Key words : hilly area ; economic forest ; power chassis ; caterpillar type ; wheel type我国南方地区的气候适宜植物生长,是各种经 济林的主要种植区,丘陵地区的经济林大部分是在人工开发出的阶梯式区域种植⑷,但因种种环境因 素限制,机械化水平较低,主要是缺少能适应复杂丘陵地形的林地动力底盘。
丘陵山区小型多功能底盘液压系统的设计_吕小荣

的研究只涉及到差速转向机构的动 态仿真以及相关研究。 与现有农业机具相比, 套作机具面临转向的问 题更为复杂且严重。中国西南丘陵山区套作种植土 地规模小、 分散、 不规则、 坡地多、 道路差, 而且作物 种 植 在 窄 行 距 空 间, 所以农机化作业的难度更 大
[711 ]
等作业。 , 尤其在转向方面, 由于地头转向空间有限, 1 . 2 液压系统的设计要求 为研发适合中国西南丘陵山地套作田间作业的 小型多功能底盘, 在充分结合西南丘陵山区套作种 植的实际情况基础上, 对液压系统的设计提出以下
( 2 ) 和( 3 ) 可得 由式( 1 ) 、 T p ≤1 223. 04 ≈1 223 N·m 液压马达排量为 2 ˑπ ˑT g V gm = ( ) / η m ≤266. 68 mL / r ( 4) ΔP 式 中 V gm 为 马 达 排 量; T g 为 单 个 马 达 驱 动 扭 T p = 2 ˑ T g ; Δ P 为 马 达 压 差,ΔP = 16 MPa; 矩, η m 为马达机械效率( 0. 90 0. 99 ) 。 因此, 以理论计算为依据, 综合考虑, 选取马达 250 ; 扭矩为 620 N · m; 排量为 250 的型号为 BM5mL / r。 双联泵的选取: 选择液压泵的主要依据是其最 [1314 ] 。 多功能底盘计算液 大工作压力和最大流量 压泵的最大工作压力 p p ( Pa ) 取决于执行元件液压
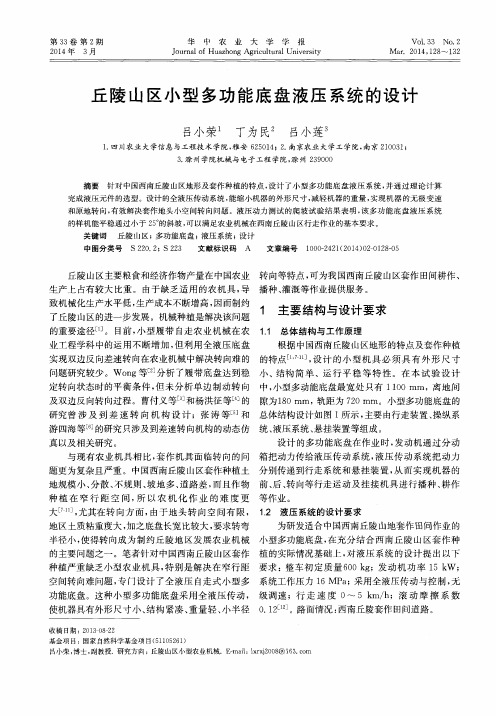
图1 Fig. 1
小型多功能底盘的总体结构图 multifunctional chassis
The overall structure diagram of the small
图2 Fig. 2
液压系统传动示意图
Schematic diagram of the hydraulic drive
基于模型试验的履带车动力学研究方案设计

度。 在运动速度一定的情况下,哥氏加速度正比于
角速度。 由哥氏加速度的变化引起的惯性力大小
确定模型车的角速度。
3.2.4 履带车滑转率测量
理论行驶状态下, 履带接地段随车体相对地
面做直线运动的速度与履带相对车体做卷绕运动
的速度相等。 但是由于滑转和滑移现象的存在,坦
克的实际行驶速度(相对于地面)与按发动机转速
计数采用边沿计数的方式来统计产生脉冲的数
量,转速计算式为
n=T0 / 60
(1)
式中:T0— ——每分钟边沿计数脉冲的数量。
(2)转矩测量
扭矩加载在测试轴上, 使粘贴在测试轴上的
应变片发生形变,加载了激励电压后,应变片的阻
值变化转换为电学信号变化, 经放大和调理后输
第 53 卷第 9 期
郭晓林 等: 基于模型试验的履带车动力学研究方案设计
了合理布置,最后介绍了模型试验的功能实现。
[关键词] 模型试验;履带车;方案设计
[中图分类号] U462;U469.6+94
[文献标志码] A
[文章编号] 1673-3142(2015)09-0017-04
Design of Dynamics Research Project of Tracked Vehicle Based on Model Test
基于模型试验的履带车动力学研究方案设计
郭晓林,赵炎,刘国强,华玉龙
(100072 北京市 装甲兵工程学院 机械工程系)
[摘要] 对利用模型试验开展履带车动力学研究的试验方案进行了设计。 首先对模型试验总体方案和模型履带
车结构设计进行分析和介绍。 在此基础上,结合月球车模型试验的研究成果,对履带车模型试验测控仪器进行
履带拖拉机软土地行走动力学仿真

履带拖拉机软土地行走动力学仿真徐飞军;黄文倩;陈立平【摘要】采用多体动力学仿真软件RecurDyn的履带车辆子系统Track(LM)建立履带拖拉机多体动力学模型,并进行仿真分析,着重对履带拖拉机在粘土和重粘土两种软性路面运行过程中履带板间及支重轮受力情况进行比较分析,提出了延长履带寿命的措施,为履带拖拉机的研制和使用提供参考.【期刊名称】《农机化研究》【年(卷),期】2009(031)012【总页数】4页(P204-207)【关键词】履带拖拉机;子系统;地面力学;动力学仿真【作者】徐飞军;黄文倩;陈立平【作者单位】国家农业信息化工程技术研究中心,北京,100097;国家农业信息化工程技术研究中心,北京,100097;国家农业信息化工程技术研究中心,北京,100097【正文语种】中文【中图分类】S219.2;S1260 引言在低洼易涝地区,大部分农田作业时期土壤含水率较高,轮式拖拉机或不能下地或作业时形成较深的轮辙,对土壤结构破坏严重[1]。
履带拖拉机对土壤的单位面积压力小,对土壤的附着性能好,适合于在松软的地面条件下进行农田作业,在农业生产过程中起着重要作用[2]。
由于履带车辆自身以及使用环境的复杂性,传统的研究模式导致研制费用高、周期长。
地面力学以及多体动力学的发展和完善为履带车辆的建模仿真提供了理论与技术支持[3],但软土地与履带之间相互作用复杂,建模困难。
以往研究履带车辆都假设在刚性路面上行走,如吉林大学的王水林对挖掘机履带行走装置在硬地面上进行了动力学分析[4]。
文献[5]和文献[6]都对滑转滑移条件下履带车辆在坚实路面上的转向过程进行了仿真和分析,而对履带车辆与软土接触情况的研究较少;文献[7]利用计算机仿真技术,就履带预张紧力对车辆软土通过性能的影响规律进行研究;文献[8]分析了履带预张紧力对高速履带车辆的平顺性的影响,但都没有涉及不同土壤特性条件下履带板和支重轮的受力分析。
目前,用于履带车辆动力学仿真的软件主要有ADAMS和RecurDyn两种。
小型电动履带底盘系统设计与试验

小型电动履带底盘系统设计与试验孙欣欣(常州汉森机械股份有限公司,江苏常州 213034)摘要:小型自走式履带底盘可用于作业空间狭窄等拖拉机无法进入的作业空间进行作业,可作为如大棚、果园、茶园等除草、采摘、植保及搬运等工作用机械的底盘,作业种类繁多,对作业机械的动力要求更多是能绿色环保。
针对现有燃油动力底盘在动力方面无法满足绿色环保作业要求的问题,对小型履带式底盘进行了动力系统的匹配设计、对传动系统结构进行理论分析,并按分析结果研制样机,对样机进行了动力系试验。
结果表明:底盘最高行驶速度平均值为6.5 km/h,两种爬坡工况底盘行驶速度为0.45 km/h和2.75 km/h,续航里程约20 km,可以满足多种作业工况的要求。
关键词:小型电动履带底盘;系统设计;试验0 引言茶园、果园作业环境空间狭窄、作业种类繁多,对机械动力要求希望绿色环保。
因此,发展小型、环保、高效、电动动力底盘是提升机械化作业水平的关键。
近年来,电动技术快速发展,电动底盘以其灵活、环保等特点在茶园、果园得到大量应用。
针对此情况,笔者在现有的履带式动力底盘基础上,对电动动力系统进行匹配设计,对传动系统及结构进行理论分析,设计了一种小型电动自走式履带底盘,该底盘主要可以满足动力环保、作业空间狭窄等拖拉机无法进入的果园、茶园作业的动力和续航方面的需求。
1 动力底盘总体结构与工作原理果园种植环境有丘陵地形和平原地形,本文研究最大坡度不超过20%地形作业用机器,主要适应除草、采摘、植保及搬运等作业,确定底盘最高行驶速度为6.5 km/h、最低行驶速度为1.5 km/h、最大载重质量为300 kg、自重120 kg,续航里程为30 km,以满足各种复杂工况需求。
1.1 底盘结构电动履带式底盘主要由车架、驱动电机、电池、变速机、控制系统、左侧履带和右侧履带组成,如图1所示。
作业底盘的动力系统安装于作业底盘行走装置的前部位置,上方安装用于茶园、果园作业的各种农机具。
油茶林抚育机履带底盘设计与试验研究

油茶林抚育机履带底盘设计与试验研究欧阳益斌;李立君;汤刚车;周方思【摘要】为了解决果园中作业机具通过性差的问题,设计一款小型抚育机履带底盘,以提高抚育机具在油茶林中的机动性和通过性.结合农用拖拉机稳定性设计的主要参数指标,基于RecurDyn动力学仿真软件建立抚育机履带底盘的多体动力学模型,开展底盘跨沟行驶过程的动力学仿真;结合设计参数及仿真试验结果,研制1台抚育机样机,并进行样机实地性能正交试验.结果表明,履带底盘的仿真试验结果与样机实地试验结果基本吻合,验证了履带底盘动力学模型的正确性;在样机实地性能试验中,抚育机林地直线行驶最高速度为1.5 m/s,当抚育机底盘质心位置横坐标为500 mm,行驶速度0.9 m/s以上时,过沟稳定性较优.%In order to solve the problem of the poor generality in operation of the agricultural implements in the mechanized farming in the oil tea plantations in southern China,and to improve the maneuverability of the machine,a small high mobility crawler chassis was designed and tested.Based on RecurDyn dynamics simulation software,the multi-body dynamics model of crawler chassis of tending machine was set up,and the dynamic simulation of cross ditch process of chassis was carried bined with the main parameter indexes of the stability design of agricultural tractors and simulation test results,a prototype of tending machine was developed,and field performance test of the prototype was conducted.The simulation results were consistent with the crawler chassis prototype field test results,verifying the correctness of the crawler chassis dynamic model.In the prototype field performance test,the highest speed of the tending machine was 1.5m/s,and the stability of cross ditch was better when the chassis center position of the chassis was 500 mm,and the running speed was more than 0.9 m/s.【期刊名称】《西北林学院学报》【年(卷),期】2018(033)002【总页数】5页(P252-256)【关键词】履带式底盘;结构设计;稳定性分析;动力学仿真【作者】欧阳益斌;李立君;汤刚车;周方思【作者单位】中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004【正文语种】中文【中图分类】S776.01随着我国林业产业结构的调整和精准扶贫的不断深入,南方地区油茶林种植面积不断增加,由于林地地形复杂,沟坡纵横,机械化抚育作业难度大。
履带工程机械底盘检测线的台体设计

测试仪 器进行 了选型。结果表明 , 台体设计方案 的通 用性较 强 , 定性好 , 该 稳 测试精度 高, 能够 满足履 带工程 机械
性 能 测 试 的 需要 。
关键词 : 履带工程机械 ; 检测线 ; 台体设计
中图分类号 :H12 T 2 文献标识码 : A 文章编号 :0 3 7 3 2 1 )5 0 3 — 3 1 0 — 7 X(0 10 — 0 6 0 表 1 常见履带工程机械的参数表
图 5 负 重 轮 结 构
图 2 履 带 路 面模 拟 装 置 结 构
张紧 轮 能使 履带 面 处 于 张紧 状 态 , 好 地模 拟 路 更 面状 况 , 紧轮 结 构 , 图 6 主要 由平 列 双扭 弹 簧 、 张 见 , 张 紧 轮 、 紧轮 轴 、 紧 轮 摆 动 架 、 兰 盘 、 子 轴 承 张 张 法 滚 N 72 2 等 组 成 , 用 目前 履 带 装 备 通 用 张 紧 轮 即 E 87 6 采 可 。张 紧轮 摆 动 架轴 1 在 主 体 机 架 上 的 轴 承 中 , 装 张 紧轮 南轴 2 过 N 7 22 轴 承定 位 支撑 。 通 E 876
21 台体 结 构 及 调 节 方 式 的 设 计 .
由于履 带 _程 机械 要两 个履 带驱 动 , 台体结 构 T 单 不能 全 面反 映履 带 T程 机械 的整体 性能 , 而双 台体结 构 则可 同 时测量 两 履带 轮 的输 出性能 参数 , 够全 面 能 反映 履带工 程装备 的性 能 , 因此 , 采用 双 台体结 构 。为 保证 底盘检 测 系统 的通 用性 , 左右两测 功 台体 的设计 , 必须 能适应 所有 T程机 械 的履 带 中心距 。综 合结构 复 杂性 、 可靠 性 、 本等 因素 , 带工 程 机械 底盘 检测 系 成 履 统采 用一个 固定测 功平 台 , 移 动测 功平 台结构 , 一个 其 结构 , 见图 1
基于圆筒式伸缩嵌套结构的伸缩履带式底盘设计

的要求 ,提高了生产效率 ,滑动轴承更易拆卸 ,且便于维护保养 ,减少 了结构件 的刚性磨损 。
关键词 :伸缩履带 ;底盘 ;伸缩嵌套结构 ;圆形截面 ;设计
中图 分 类 号 :T 2 37 H 1. 文献 标 识码 :A
,
文章 编 号 :10 — 75 ( 0 0 0 0 0 0 0 1 0 8 2 1 ) 8— 0 4— 3
i g t e o e ain a d ma n e a c ,t et ls o i c a l rc a sso yi d ia ee c p cn s d s u t r e in d b s d n h p r t n i tn n e h ee c p c r w e h si fc l r l ls o i e t t c u e i d sg e a e o n c t e r s
Ab t a t sr c :T ru h t e a a y i o h r c s i g ma u a tr b l y r lt d t h ee c p c ca e h s i wi e — h o g h n l s n t e p o e sn n f cu a i t ea e t e t ls o i r wlrc a ss t r c s i Байду номын сангаас h
o n UGN paf r b X lt m y印 p yn e c a a t r t so a yp o e s gf r ic lrc o ss c in a d s o g b a i gc p c t f o l ig t h r cei i fe s rc s i ru a r s e t n t n e rn a a i o h sc n oc o r y s d n e rn n y a o t g t e c o s s c in c lu ai n o t z t n p o r m r tn b sn EL HIs f a e T e l i g b a i g a d b d p i h r s —e t — a c lt p i ai r g a w i e y u i g D P ot r . h i n o o mi o t w c ru a ee c p c c o s s ci n o e c a sssg i c n y i r v st e p o e s g ma u a tr b l y o e c t a at f ic lrt ls o i r s e t f h h si inf a t mp o e h r c s i n f eu a i t t r il p r o o t i l n i fh i c s s u t rl c mp n n s t cu a o o e t ,wh c o n y r d c st e df c l f r c s i gb tas r a y r d c st e a u to c a ia r ih n t l e u e h i u t o o e sn u lo g e t e u e h mo n fme h n c o i y p l l p o e sn .T er q i me t f r h a g l n n o i gma h n r e u e e p c f d l tu t r e in a d rc s i g h e u r e n s o e 1r emi i ga d b r c i e ae r d c d i r s e t t l n n o mo u esr cu ed s g n p c si g tc n lg o r e sn e h oo y,te p d ci i s i rv d,a d t e si ig b ai g b c me r e v b e a d e s ob i - h r u t t i mp o e o vy n h l n e rn e o s mo e rmo a l n a y t e man d
丘陵山区小型多功能底盘液压系统的设计
大_ 7 。 , 尤其 在转 向 方 面 , 由于 地 头 转 向空 间有 限 , 1 _ 2 液压 系统 的设 计要 求 地 区土 质粘重 度大 , 加 之底盘 长宽 比较大 , 要求 转 弯 为研发适 合 中 国西 南 丘陵 山地套 作 田间作业 的
1 主 要 结构 与设 计 要 求
根据 中 国西 南丘 陵 山区地形 的特 点及 套作 种植
的重要 途径 _ 1 ] 。 目前 , 小 型履 带 自走 农 业 机 械 在 农 1 . 1 总体 结构与 工作 原理
业工程学科中的运用不断增加 , 但利用全液压底盘
实 现双 边反 向差 速转 向在农 业机 械 中解 决转 向难 的 的特 点[ 1 , 7 - 1 1 ] , 设 计 的 小 型 机 具 必 须 具 有 外 形 尺 寸 问题研 究较 少 。W o n g等_ 2 ] 分 析 了履 带 底 盘达 到 稳 小 、结构 简 单 、运 行 平 稳 等 特 性 。在 本 试 验 设 计 定 转 向状态 时 的平衡 条 件 , 但 未 分 析单 边 制 动 转 向 中 , 小 型多 动能底 盘最 宽 处 只有 1 1 0 0 mm,离地 间
的样 机能平稳 通过小于 2 5 。 的斜坡 , 可 以满足农业机械在西南丘陵山区行走作业的基本要求 。 关键 词 丘 陵山区 ; 多功能底 盘 ; 液压系统 ; 设计 中图分类号 S 2 2 0 . 2 ; S 2 2 3 文献标识码 A 文章编号 1 0 0 0 — 2 4 2 1 ( 2 0 1 4 ) 0 2 — 0 1 2 8 — 0 5
游 四海 等_ 6 ] 的研究 只涉及 到差 速转 向机 构 的动态 仿 统 、 液 压系统 、 悬 挂装置 等组 成 。 真 以及相 关研 究 。 设 计 的多 功 能底 盘 在 作业 时 , 发 动 机 通过 分 动 与 现有 农 业 机具 相 比 , 套 作机 具 面 临转 向的 问 箱把动力传给液压传动系统 , 液压传动系统把动力 题更 为 复杂且 严重 。中国西南 丘 陵 山区套作种 植 土 分 别传 递到行 走 系统 和 悬 挂 装 置 , 从 而 实现 机 器 的 地规 模 小 、 分散、 不规 则 、 坡地多、 道路 差 , 而 且作 物 前 、 后、 转 向等行走 运 动 及 挂 接 机具 进 行 播 种 、 耕 作
西南丘陵山地套作小型多功能底盘的应用前景分析

西南丘陵山地套作小型多功能底盘的应用前景分析吕小荣;丁为民【摘要】对西南丘陵山地耕作区农业生产现状包括其特有的地理、气候和套作种植模式等特点进行了分析,并结合国家政策以及研究的多功能底盘自身适合丘陵山地套作种植的特点,得出套作小型多功能底盘在西南丘陵山地具有广阔的发展应用前景.【期刊名称】《农机化研究》【年(卷),期】2013(035)009【总页数】3页(P250-252)【关键词】多功能底盘;西南丘陵山地;套作;应用前景【作者】吕小荣;丁为民【作者单位】南京农业大学工学院,南京210031;四川农业大学信息与工程技术学院,四川雅安625014;农业部西南作物生理生态与耕作重点实验室,成都611130;南京农业大学工学院,南京210031【正文语种】中文【中图分类】S219.0320 引言西南6省区是我国主要的农业生产区[1-3],包括四川、贵州、广西、云南等在内。
该区多以丘陵和山地为主,地理环境复杂,地块小且不连片,种植分散,道路崎岖起伏不平;且经营规模以家庭为主,农民一家一户一个生产单位的经营形式,使得田块被人为地划分过小,适宜使用小型机具,极需研制开发新型小型农业机械装备。
1 农业生产现状农业机械化是农业现代化的重要组成部分和主要标志。
四川省是丘陵大省,丘陵山地占全省幅员的70%以上[3],农业机械化发展的快慢好坏,直接影响到全省农业机械化、农业现代化总体目标能否实现。
1.1 西南丘陵地区的特点西南丘陵山区地理环境和种植结构比较复杂,地形高低不平,有坡度,田间沟埂纵横,道路崎岖难行,交通极不便利,机械通过能力差;地块小且不连片,同时坡度和落差大,不便于机械作业;且自然环境、气候条件和种植习惯多样化,导致农机化发展滞后。
1.2 西南气候环境对农业生产的影响西南丘陵山地由于土地类型较多,气候资源适宜,如年平均气温15 ℃以上、日平均温度在10 ℃以上、年积温5 000℃、年日照时数1800 ~2 200h、年降雨量800mm以上[3-4],长期以来形成了多熟农作制度。
双侧电驱动履带车辆等效条件积分滑模稳定转向控制

双侧电驱动履带车辆等效条件积分滑模稳定转向控制曾庆含;马晓军;廖自力;魏曙光【摘要】履带车辆转向阻力随行驶状态呈现非线性、大范围变化的现象,且由于车辆惯性大、电机驱动能力有限,易进入深度饱和状态,而双侧电机动力相互独立,要实现车辆全速度范围的稳定转向必须对两侧力矩进行有效控制.针对以上问题,设计了一种横摆角速度控制律.开展转向动力学分析,提出速度、横摆角速度转向控制结构;设计了一种带等效控制项的条件积分滑模控制算法,通过引入等效控制项,提高系统响应速度,减小滑模抖振;通过引入条件积分控制项,使滑模控制项边界层外与经典滑模性能一致,鲁棒性强,边界层内平滑切换为Anti-Windup结构的PI控制,便于消除误差,抑制积分饱和.Matlab与RecurDyn联合仿真表明,提出的算法具备跟踪能力强、抗扰动和饱和、输出控制量平滑的优点,能够实现车辆稳定转向控制.【期刊名称】《兵工学报》【年(卷),期】2016(037)008【总页数】8页(P1351-1358)【关键词】兵器科学与技术;履带车辆;电传动;转向控制;滑模控制【作者】曾庆含;马晓军;廖自力;魏曙光【作者单位】装甲兵工程学院全电化技术重点实验室,北京100072;装甲兵工程学院控制工程系,北京100072;装甲兵工程学院全电化技术重点实验室,北京100072;装甲兵工程学院控制工程系,北京100072;装甲兵工程学院全电化技术重点实验室,北京100072;装甲兵工程学院控制工程系,北京100072;装甲兵工程学院全电化技术重点实验室,北京100072;装甲兵工程学院控制工程系,北京100072【正文语种】中文【中图分类】TJ81+0.323双侧电驱动结构简单、控制方便,在履带车辆中被广泛采用,美国M113、瑞典SEP以及北京理工大学的电驱动履带样车均采用该结构[1-3]。
该方案中两侧驱动系统输出动力相对独立,要精确、稳定地转向,需要对其进行闭环反馈控制,协调控制两侧输出动力。
丘陵山地拖拉机后悬挂技术的应用与研究

丘陵山地拖拉机后悬挂技术的应用与研究作者:李玲玲李广宇徐峰张云硕孟长伊来源:《农业与技术》2017年第21期摘要:大幅度提高山地拖拉机的耕作效率一直是农业生产者的使用需求,丘陵山地拖拉机后悬挂系统作为拖拉机进行农业生产的关键部分,已然成为研究问题的重要部分。
本文介绍了后悬挂液压系统与电液控制系统的应用与研究,比较分析了电液控制系统的优点,进一步说明智能拖拉机是未来农业生产的关键动力源。
关键词:山地拖拉机;后悬挂系统;控制技术中图分类号:S222 文献标识码:A DOI:10.11974/nyyjs.20171132022引言我国地型复杂多样,特别是丘陵山地面积占有量大,目前,用于丘陵山地作业的农机具主要是一些小型拖拉机,这些拖拉机动力小,作业效率低,专业型山地拖拉机占有量少。
无论在发展规模上、发展水平上还是发展速度上,丘陵地区的农机化发展水平滞后于平原地区几十年,导致我国农业机械发展极度不平衡。
受地形因素的影响,国内外对丘陵山地农机化的发展模式都没有找到合适的解决方法,丘陵山地农机化发展水平也是我国农业机械发展的面临的一大难题,是亟待解决的一项技术难题。
2016年9月12日,国家科技部重点研发计划“智能农机装备”中重点专项“丘陵山地拖拉机关键技术研究与整机开发”项目成功启动。
与会专家一致认为,我国丘陵山地农机发展水平落后,机械化进程缓慢,智能化水平较低等技术问题亟待解决[1]。
丘陵山地拖拉机后悬挂技术控制着农具的升降,是保证机组作业质量的关键技术。
1 拖拉机后悬挂简介拖拉机只有与相匹配的农机具安装在一起才可进行农业作业,比如将铧式犁与拖拉机安装在一起,则会组合形成拖拉机犁耕机组,将拖拉机与收割机安装在一起,则会组合形成拖拉机收割机机组等。
拖拉机与农机具的安装方式一般分为3种模式:牵引式、悬挂式和半悬挂式[2]。
1.1 牵引式由拖拉机牵引农机具进行农业作业,这类农机具结构复杂,需要手动操作,正在被逐渐取代,如牵引式播种机和收割机等。
应急救援装备小型手扶式运输车动力传动系统参数匹配与结构设计
应急救援装备小型手扶式运输车动力传动系统参数匹配与结构设计杜波;王建华;殷鹰;胡园园;陈娟;毛丹【摘要】针对目前在偏远地区复杂道路上消防部队人员运输应急救援装备存在困难的问题,设计了一种应急救援装备小型手扶式运输车布置方案.在此基础上对运输车动力传动系统参数进行了匹配,验证了参数匹配的合理性.运用SolidWorks软件,对运输车各组成部分结构进行了详细的设计,最终建立了应急救援装备小型手扶式运输车整车三维模型.该运输车的设计开发为解决在偏远地区复杂道路上应急救援装备的运输问题提供一种有效途径.【期刊名称】《机械工程师》【年(卷),期】2018(000)005【总页数】5页(P88-91,95)【关键词】应急救援装备;手扶式运输车;参数匹配;结构设计【作者】杜波;王建华;殷鹰;胡园园;陈娟;毛丹【作者单位】四川省特种设备检验研究院,成都 610061;西华大学汽车与交通学院,成都 610039;四川省消防总队眉山市消防支队,四川眉山620020;四川省特种设备检验研究院,成都 610061;四川省特种设备检验研究院,成都 610061;四川省特种设备检验研究院,成都 610061;四川省特种设备检验研究院,成都 610061【正文语种】中文【中图分类】TU480 引言近几年来,我国西部地区自然灾害频发,造成了惨重的人员伤亡以及巨大的经济损失。
发生自然灾害的地区往往是一些地势复杂、交通欠发达的贫困偏远地区[1-2]。
一旦主干道路受阻,大型救援专业设备将无法快速运抵灾区现场。
此时,消防救援官兵只能以人力背运或担架搬运的方式携带一些应急救援装备,沿着一些狭窄的山间小路以徒步的方式挺进灾区。
但长距离的负重步行会增加士兵负担、消耗体能,将严重影响到抢险救援的有效实施。
因此,有必要开发一种能在复杂道路上(如:狭窄乡村小道、坑洼路面、陡长坡道等)辅助消防官兵运输应急救援装备小型运输工具。
以减轻消防官兵的负担,节省体能,提高部队应急抢险救援的能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力底盘的作业生产 率 ,在 农 艺 技 术 要 求 所 允 许 的 范 围
内,选取尽量低的刀轴转速 n = 125r / min 配以较大的
机组前进速度 Vm = 0. 65m / s 进行旋耕作业。 1. 3. 1 旋耕功率消耗的设计计算
由以下公式计算、预测旋耕功耗,即
N1 = 0. 1Kλ dVm B
·116·
2013 年 9 月
农机化研究
第9 期
工作刀轴采用与行 走 装 置 相 独 立 的 传 动 系 统 ,工 作 平 稳可靠 ,提高了机 手 的 操 作 舒 适 度 ,但 机 器 结 构 复 杂 , 轮距和外形尺寸过 大 ,不 适 合 山 地 垄 间 作 业。 ③ 少 数 机型采用单履带作 为 行 走 部 件 ,从 而 减 小 了 机 器 的 外 形尺寸; 但同时却大大降低了机器的横向平稳性,依 靠机 手 扶 持 保 持 机 身 平 衡,劳 动 强 度 大,容 易 发 生 侧 翻等事故[6]。 1. 2 整体方案设计及工作原理
( 1)
式中 N1 —旋耕功耗( kW) ;
Kλ —旋耕比阻( N / cm2 ) ;
d—耕深( cm) ,d = 12;
Vm —机组前进速度( m / s) ,Vm = 0. 65; B—耕幅( m) ,B = 0. 6。
·117·
2013 年 9 月
农机化研究
第9 期
在不同土质及作 业 方 式 下 ,旋 耕 比 阻 应 乘 以 适 当 的系数进行修正,则
笔者以上文述及的第 2 种机型的结构为基础,吸 收履 带 式 底 盘 牵 引 力 大、附 着 性 能 好、通 过 性 能 强 等 优点 ,结合河南省西 部 地 区 烟 田 的 实 际 农 艺 状 况 设 计 开发了一种双履带式微耕机动力底盘。该底盘采用 双履带行走装置提 高 了 机 器 的 作 业 稳 定 性 ,从 而 改 善 了作业质量,减轻了机手的操纵难度; 采用橡胶履带, 降低 接 地 比 压,减 轻 了 对 土 壤 的 压 实,有 利 于 根 系 的 健壮成长[7]。
机器总体由动力 部 分 、传 动 系 统 、行 走 装 置 、工 作 部件、机架及扶手操纵装置等组成。
为了保护传动系 链 条 以 及 发 动 机 的 安 全 使 用 ,第 一级传动采用窄 V 带,主变速箱采用三级直齿圆柱齿 轮传动,分前进挡、空挡和倒挡 3 级 挡 位。动 力 经 过 主变速箱后分成两路: 一部分输出至履带行走部分的 驱动轮,带动微耕机行走; 另一部分动力输送至作业 机具,装 配 不 同 的 工 作 部 件 便 可 完 成 喷 药、覆 膜布八 级工作位置,高度方向 3 个工作位置,可满足不同机 手从事个别作业的位置要求。结构简图及传动路线 图分别如图 1 和图 2 所示所示。
图 2 动力底盘传动路线图
Fig. 2 Transmission map of the power chassis
1. 3 功率消耗的设计计算
以消耗功率最大 的 旋 耕 作 业 为 计 算 对 象 ,动 力 底
盘驱动旋耕刀具作 业 时 ,发 动 机 的 绝 大 部 分 功 率 用 于
刀辊的入土 、翻土 过 程 。 其 数 值 可 计 算 预 测 和 实 测 确
1 研究内容
1. 1 国内相关机型 针对丘陵山区微 耕 机 适 应 性 能 不 足 等 缺 点 ,相 关
学者以及科研单 位 进 行 了 大 量 的 研 究 工 作 。 目 前 ,研 制的机型大致分为 3 种: ①刀轴驱动型。这类机器运 输 时 使 用 橡 胶 双 轮 行 走,中 耕 作 业 时 将 橡 胶 轮 拆 下, 装 配 上 旋 耕 刀 组 、除 草 轮 等 即 可 完 成 相 应 的 旋 耕 、培 土 、除草等作业 。 该 机 型 大 多 采 用 立 轴 式 小 功 率 发 动 机直接联接行走变 速 箱 ,如 河 南 洛 阳 卓 格 哈 斯 机 械 有 限公司生产的 1WG3. 3 多功能微耕机及 美 国 俄 亥 俄 州 MTD 公司生产的 21A - 24MK000 型 园 艺 管 理 机。 刀轴驱动型微耕机结构简单,操作轻便; 但工作时受 土壤反力大 ,稳定 性 差 ,机 手 操 作 费 力 。 ② 刀 轴 、行 走 双轴型。这种机型采用双轮或者四轮作为行走装置,
定。为了计 算 预 测 功 耗,国 内 外 学 者 提 出 了 如 单 元
法 、能量法 、比功法 、比 阻 法 等 解 析 方 法 。 由 于 旋 耕 作
业功率消耗影响因素较多 ( 主要有刀轴转速 n 、机组
前进速度 vm 、耕深 d 、耕幅 B 以及土质等) ,但速度参 数是其最主要的影 响 因 素 ,它 不 仅 影 响 垡 块 的 抛 掷 速
1. 旋耕刀组 2. 齿轮变速箱 3. 双履带行走装置 4. 机架 5. 带传动 6. 发动机 7. 扶手
图 1 动力底盘结构简图( 装配旋耕刀具图) Fig. 1 Structural sketch of the power chassis( assembled with
rotary blades)
关键词: 动力底盘; 双履带; 虚拟装配; 旋耕; 丘陵山区
中图分类号: S224. 4
文献标识码: A
文章编号: 1003 - 188X( 2013) 09 - 0116 - 04
0 引言
目前 ,我国丘陵山 区 农 业 机 械 化 作 业 水 平 普 遍 偏 低,运 输、旋 耕 以 及 起 垄、培 土、除 草 等 中 耕 作 业 仍 主 要以手工作业为 主 ,用 工 多 、劳 动 强 度 大 ,劳 动 力 投 入 在农业生产总成本 中 所 占 比 例 过 大 ,已 成 为 限 制 丘 陵 山区农业生产发展的主要因素[1]。丘陵山区 田 块 细 碎分 散、耕 层 薄、坡 度 大、交 通 不 便,大 中 型 农 业 机 械 进田作业存在着一 定 难 度 以 及 安 全 隐 患 ,并 且 大 型 农 机成本过高 ,我国个 体 户 农 民 尚 不 具 备 足 够 的 经 济 能 力和购买意愿 。 因此 ,广 泛 适 用 于 我 国 丘 陵 山 区 的 农 业机械主要以各式 各 样 的 自 走 式 微 型 耕 耘 机 为 主 ,此 外还有少量山地拖拉机[2]。山地拖拉机由于 引 入 液 压差高驱动及流 量 、方 向 调 节 等 装 置 ,机 器 结 构 复 杂 , 外形尺寸庞大 ,运 行 、保 养 技 术 高 ,价 格 昂 贵 。 微 型 耕 耘机又称 田 园 管 理 机、微 型 耕 作 机,简 称 微 耕 机[3]。 2006 年,中国 农 业 部 发 布 微 型 耕 耘 机 鉴 定 大 纲 DG / T006 - 2006,大 纲 规 定 微 耕 机 为 额 定 功 率 不 大 于 7. 5kW,主要用于水旱田耕整、田园管理、设施农业等 作业的微动力型耕整作业机械。目前市场通用机型 的配套动力多为 1. 5 ~ 6. 0kW 风冷汽油机或柴油机, 普遍采用 2. 20 ~ 5. 88kW。20 世纪 80 年代,随着土地 联产承包责任制政 策 的 实 施 ,大 型 农 业 机 械 的 发 展 陷 入低潮 ,加之农民 收 入 普 遍 提 高 ,购 买 力 增 加 ,我 国 开
考虑到动力底盘 采 用 橡 胶 履 带 代 替 金 属 履 带 ,避
免了金属履带装置的驱动轮卷绕履带时销与销套的
摩擦力 、履带架与 履 带 板 的 接 触 摩 擦 力 ,而 驱 动 轮 、导
∑ F = 1. 15 ( Ff + Fi ) =
1. 15( fG + Gsinα)
( 3)
式中
f—滚动阻力因数,f = 0. 09 ; G—底盘质量( N) ,G = 600 ; α—坡度角( °) α ≤ 45 。
∑ F ≤ 1. 15 ( 0. 09 × 600 + 600 × sin45° ) = 550N
mail) jjt0907@ 163. com。
始引入价格相对低廉、功能多用的微耕机; 20 世纪 90 年代中期至今,我国微耕机行业迅猛发展,至 2000 年 底全国专业生产微耕机厂家便达百余家[4 - 5]。
目前 ,将大田通用 型 微 耕 机 直 接 或 经 简 单 改 造 后 配以作业机具应用 于 丘 陵 山 区 作 业 效 果 并 不 理 想 ,主 要原因包括以下两点: 一是配套机具方面。一些生产 厂家 自 行 改 造、设 计 的 起 垄 机、开 沟 器、培 土 器、覆 膜 机 等 中 耕 管 理 机 具 的 针 对 性 不 足 ,实 用 价 值 小,整 机 设计技术水平偏低导致作业质量往往不能达标。二 是缺少成型的动力 机 械 作 业 底 盘 ,农 机 具 与 动 力 匹 配 性能 差,经 常 会 有 功 率 不 足、机 具 牵 引 阻 力 过 大 等 现 象的发生 。 因此 ,在 丘 陵 山 区 农 业 生 产 中 大 范 围 推 广 使用的成熟机型较 少 ,丘 陵 山 区 整 体 机 械 化 水 平 远 低 于全国平均水平。
种 适 应 山 地 作 业 、结 构 简 单 的 小 型 动 力 底 盘 ,并 采 用 模 块 化 设 计 理 念 开 发 了 与 动 力 底 盘 相 独 立 的 配 套 作 业 机 具 。
在 三 维 设 计 软 件 中 完 成 了 变 速 装 置 的 虚 拟 装 配 设 计 ,进 行 了 干 涉 检 查 。 利 用 快 速 拆 卸 装 置 ,安 装 不 同 的 作 业 部
件 ,该 底 盘 可 完 成 旋 耕 、起 垄 、覆 膜 、培 土 、除 草 、运 输 和 喷 药 等 作 业 。试 验 表 明 ,双 履 带 式 动 力 底 盘 具 有 优 越 的 爬
坡 能 力 与 较 强 的 牵 引 附 着 性 能 ,操 作 稳 定 性 好 ,田 间 松 软 地 面 通 过 性 高 。
K4 —作业方式修正系数,K4 = 0. 66 。 Kλ = 5. 46N / cm2 N1 = 2. 56kW