台达伺服驱动器ASDA-A2参数设置
Delta_ASDA-A2_M_SC_20130603操作手册-第四章 面板显示及操作

第四章面板显示及操作本章说明ASDA-A2系列伺服驱动器的面板状态显示及各项操作说明。
4.1 面板各部名称第四章 面板显示及操作 ASDA-A2系列4.2 参数设定流程(1) 驱动器电源投入时,显示器会先持续显示监视变量符号约一秒钟。
然后才进入监控模式。
(2) 按MODE 键可切换参数模式→监视模式→异警模式,若无异警发生则略过异警模式。
(3) 当有新的异警发生时,无论在任何模式都会马上切到异警显示模式下,按下MODE 键可切换到其他模式,当连续20秒没有任何键被按下,则会自动切换回异警模式。
(4) 在监视模式下,若按下UP 或DOWN 键可切换监视变量。
此时监视变量符号会持续显示约一秒钟。
(5) 在参数模式下,按下SHIFT 键时可切换群组码。
UP /DOWN 键可变更后二字符参数码。
(6) 在参数模式下,按下SET 键,系统立即进入编辑设定模式。
显示器同时会显示此参数对应的设定值,此时可利用UP /DOWN 键修改参数值,或按下MODE 键脱离编辑设定模式并回到参数模式。
(7) 在编辑设定模式下,可按下SHIFT 键使闪烁字符左移,再利用UP /DOWN 快速修正较高的设定字符值。
(8) 设定值修正完毕后,按下SET 键,即可进行参数储存或执行命令。
(9) 完成参数设定后,显示器会显示结束代码「SAVED 」,并自动回复到参数模式。
第四章面板显示及操作 ASDA-A2系列4.3 状态显示4.3.1 储存设定显示当参数编辑完毕,按下SET储存设定键时,面板显示器会依设定状态持续显示设置状态符号一秒钟。
4.3.2 小数点显示4.3.3 警示信息显示4.3.4 正负号设定显示第四章面板显示及操作 ASDA-A2系列4.3.5 监控显示驱动器电源输入时,显示器会先持续显示监控显示符号约一秒钟。
然后才进入监控模式。
在监控模式下可按下UP或DOWN键来改变欲显示的监视变量,或可直接修改参数P0-02来指定监视代码。
台达A2系列伺服电机调试步骤(2019.7.12)

第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C DC/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通EBproV6.0设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1)、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44(分子)和P1-45(分母)电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如0.001mm,相当于一个脉冲想走的距离0.001mm;b.行走速度200mm/s,PLC最大发脉冲数2000000*0.001(目前伺服电机最快20m/min)c.电机编码器分辨率1280000P/Rd.齿轮分度圆直径63.66mme.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可。
台达CANopen通讯伺服速度S控制

16.16 通过CANopen 总线控制ASDA-A2伺服驱动器(DS402)¢ 控制要求当 X0=ON 时,变频器停止并进入准备运转状态;当 X1=ON 时,变频器运转,运转速度为900转/分钟,运转方向为顺时针旋转。
¢ 连接示意图¢ 台达ASDA-A2 伺服驱动器通讯参数设置¢ ADSA-A2 伺服驱动器在本例中配置的参数说明参数 设置值 说明P1-01 b 设置伺服工作模式为CANopen模式。
P03-002设置ASDA-A2伺服CANopen 站号P03-01 0400ASDA-A2伺服CANopen 通讯速率设置为1Mbps 。
P03-01的第三位用于设置伺服的CANopen 通讯速率,其值与通讯速率对应关系如下所示:0:125Kbps 1: 250Kbps 2: 250Kbps 3: 500Kbps 4: 1M Kbps参数索引 参数子索引 参数说明 6083 0 伺服驱动器才从0rpm 加速到3000rpm 需要的时间,单位ms 。
6084 0 伺服驱动器才从3000rpm 减速到0rpm 需要的时间,单位ms 。
6081 0 伺服驱动器速度,单位为单元/每秒。
607A 0伺服驱动器目标位置,单位为单元。
¢模块设置按照下表分别对DVPCOPM-SL扫描模块进行设置模块名称节点地址通讯速率DVPCOPM-SL 扫描模块011M bpsASDA-A2伺服驱动器021M bps¢使用 CANopen 网络配置工具配置网络1. 打开 CANopenBuilder 软件,软件界面如下图所示。
2. 选择『设置(S)』菜单,点击『通讯设置』,选择『串口设置』指令。
3. 在此对计算机与 SV 主机的通讯参数进行设置。
如”通讯端口”、”通讯地址”、”通讯速率”、”通讯格式”。
项目说明默认值当计算机连接的设备为DVPCOPM-SL时,接注:CANopenBuilder 组态软件中的通讯速度,数据位,校验位,停止位以及模式的选择须与 SV PLC 主机设置一致。
ASDA-A2

8-42
Revision Jun, 2013
第八章 参数与功能ASDA-A2 系列
混合模式:可藉由外部的 DI (Digital Input)来切换模式,例如 设为 PT/S 的混合模式(控制模式设定:06), 则可藉由DI: S-P(请参考表 7.1)来进行模式的切换。
操作接口: 面板 / 软件
通讯
初值: 0
控制模式: ALL
单位: P(pulse);S(r/min);T(N-M)
设定范围: 00 ~ 110F
资料大小: 16bit
数据格式: HEX
参数功能:
通讯地址:0102H 0103H
相关索引:6.1 节
表 8.1
Revision Jun, 2013
8-41
3.33Mpps ):
<150ns 150ns
150ns<150ns
Pulse Input
Pulse Input
filtered signal
当此段脉冲频宽小于150 ns,会被视为低准 当此段脉冲频宽小于150 ns,会被视为高准
位,因此两个输入脉冲被视为一个脉冲
位,因此两个输入脉冲被视为一个脉冲
TH
Pulse
TH
(29)
(46) Sign
(40)
T1 T1 T1 T1 T1 T1
辑 正转脉波列 及 逆转脉波列
(38) Pulse
(29)
(46) Sign (40)
TH
T2 T2 T2 T2 T2 T2
T3
T2 T2 T2 T2 T2 T2
TH
高速脉波输入
台达A2伺服配线及操作

台达A2伺服配线及操作伺服驱动器是一种高性能运动控制设备,广泛应用于机械加工、物流设备、仪器仪表等领域。
而台达A2伺服驱动器是台达电子推出的一款先进的伺服驱动器,具有高稳定性、高精度和高效能的特点。
本文将介绍台达A2伺服驱动器的配线及操作。
首先,说到伺服驱动器的配线,我们需要了解一些基本概念。
在伺服驱动器的使用过程中,通常需要进行电源和信号线的连接。
电源线连接到伺服驱动器的电源接口,用来提供工作所需的电力;信号线连接到伺服驱动器的信号接口,用来传输指令和反馈信号。
在进行配线之前,一定要确保伺服驱动器处于断电状态,以确保安全。
接下来,我们来具体介绍一下台达A2伺服驱动器的配线步骤:1.确认电源线的接线口。
台达A2伺服驱动器通常有两个电源接线口,分别是主电源接线口和控制电源接线口。
主电源接线口连接到主电源,用来提供运动控制的电力;控制电源接线口连接到控制器,用来提供控制信号的电力。
2.连接电源线。
根据实际情况,选择适合的电源线,一端连接到伺服驱动器的电源接线口,另一端连接到电源。
3.确认信号线的接线口。
台达A2伺服驱动器通常有几个信号接线口,包括运动指令输入、位置反馈输入和报警输出等。
根据实际控制需求,选择适合的信号接线口。
4.连接信号线。
根据实际情况,选择适合的信号线,一端连接到伺服驱动器的信号接线口,另一端连接到控制器或传感器。
5.安装连接好的伺服驱动器。
将连接好的伺服驱动器安装到合适的位置,并固定好。
完成上述配线步骤后,我们可以进行台达A2伺服驱动器的操作。
伺服驱动器的操作可以通过控制器或人机界面进行。
下面是一些常见的操作步骤:1.通电前的检查。
在通电之前,需要检查伺服驱动器的电源线、信号线以及控制器的连接是否正确。
2.通电。
将主电源和控制电源分别接通,并确保伺服驱动器的指示灯亮起,表示电源正常。
3.参数设置。
通过控制器或人机界面,设置伺服驱动器的参数,包括运动控制参数、速度参数和位置参数等。
Delta_ASDA-A2_M_SC_20130603操作手册-第三章 配线

伺服电机
Revision Jun, 2013
3-1
第三章 配线ASDA-A2 系列
NOTE
安装注意事项: 1) 检查 R、S、T 与 L1c、L2c 的电源和接线是否正确。 2) 确认伺服电机输出 U、V、W 端子相序接线是否正确,接错电机可能 不转或乱转。 D 端开路、 外部回生电阻应接于 P 、 3) 使用外部回生电阻时, 需将 P 、 C 端,若使用内部回生电阻时,则需将 P 、D 端短路且 P 、C 端开 路。 4) 异警或紧急停止时, 利用 ALARM 或是 WARN 输出将电磁接触器 (MC) 断电,以切断伺服驱动器电源。
3-2
Revision Jun, 2013
第三章 配线ASDA-A2 系列
3.1.2 驱动器的连接器与端子
端子记号
L1c、L2c R、S、T U、V、W FG
名称
控制回路电源输入端 主回路电源输入端 电机连接线 格)
说明
连接单相交流电源。 (根据产品型号,选择适当的电压规 连接三相交流电源。 (根据产品型号,选择适当的电压规 格) 连接至电机 端子记号 U V W FG 线色 红 白 黑 绿 连接至驱动器的接地处 P 、D 端短路,P 、C 端开路 电阻接于 P 、C 两端,且 P 、D 端开路 使用外部刹车单元 将刹车单元的 P 、P 分别连接于 伺服的 P 、P 两端,且 P 、D -8
Revision Jun, 2013
第三章 配线ASDA-A2 系列
3.1.5 编码器引出线的连接头规格
编码器连接示意图一:
伺服驱动器
*2
快速接头
*1
CN2 连接头
编码器引出线 的连接头
编码器引出线
电机
台达PLC控制伺服ASDA说明

台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
2:监控画面:原点回归、相对定位、绝对定位。
附:ASD-A伺服驱动器参数必要设置注意:当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
附:PLC元件说明附:PLC与伺服驱动器硬件接线图控制程序:程序说明:1:当伺服上电之后,如无警报信号,X3=On,此时,按下伺服启动开关,M10=On,伺服启动。
2:按下原点回归开关时,M0=On,伺服执行原点回归动作,当DOG信号X2由Off→On变化时,伺服以5KHZ的寸动速度回归原点,当DOG信号由On→Off变化时,伺服电机立即停止运转,回归原点完成。
3:按下正转10圈开关,M1=On,伺服电机执行相对定位动作,伺服电机正方向旋转10圈后停止运转。
4:按下正转10圈开关,M2=On,伺服电机执行相对定位动作,伺服电机反方向旋转10圈后停止运转。
5:按下坐标400000开关,M3=On,伺服电机执行绝对定位动作,到达绝对目标位置400,000处后停止。
6:按下坐标-50000开关,M4=On,伺服电机执行绝对定位动作,到达绝对目标位置-50,000处后停止。
7:若工作物碰触到正向极限传感器时,X0=On,Y10=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
8:若工作物碰触到反向极限传感器时,X1=On,Y11=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
9:当出现伺服异常报警后,按下伺服异常复位开关,M11=On,伺服异常报警信息解除,警报解除之后,伺服才能继续执行原点回归和定位的动作。
10:按下PLC脉冲暂停输出开关,M12=On,PLC暂停输出脉冲,脉冲输出个数会保持在寄存器内,当M12=Off时,会在原来输出个数基础上,继续输出未完成的脉冲。
AELTA ASDA-A2 说明书
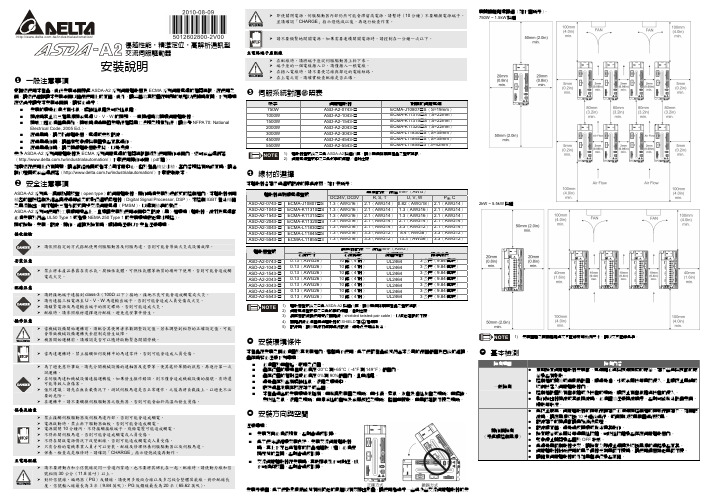
安裝示意圖:為了使散熱風扇能夠有比較低的
檢測項目
運轉前檢測 (已供應控制電源)
檢測內容 編碼器電纜應避免承受過大應力。當馬達在運轉時,注意接續電纜是否與機件接觸 而產生磨耗,或發生拉扯現象。 伺服馬達若有振動現象,或運轉聲音過大,請與廠商聯絡。 確認各項參數設定是否正確,依機械特性的不同可能會有無法預期的動作。勿將參 數作過度極端之調整。 重新設定參數時,請確定驅動器是否在伺服停止(SERVO OFF)的狀態下進行, 否則會成為故障發生的原因。 繼電器動作時,若無接觸的聲音或其他異常聲音產生,請與廠商聯絡。 電源指示燈與 LED 顯示有異常現象,請與廠商聯絡。
NOTE
驅動器型號後之為 ASDA-A2 機種代碼,請參照實際購買產品之型號資訊。 伺服馬達型號中之為煞車或鍵槽/油封仕樣。
ቢՄ۞Ᏼፄ
本驅動器各端子與信號配線的標準線材,如下表所示: 驅動器與對應馬達型號 ASD-A2-0743- ASD-A2-1043- ASD-A2-1543- ASD-A2-2043- ASD-A2-3043- ASD-A2-4543- ASD-A2-5543- 驅動器型號 ECMA-J10807S ECMA-K11310S ECMA-K11315S ECMA-K11320S ECMA-L11830S ECMA-L11845S ECMA-L118553 DC24V, DC0V 1.3(AWG16) 1.3(AWG16) 1.3(AWG16) 1.3(AWG16) 1.3(AWG16) 1.3(AWG16) 1.3(AWG16) 電源配線-線徑 mm²(AWG) R, S, T U, V, W 2.1(AWG14) 0.82(AWG18) 2.1(AWG14) 1.3(AWG16) 2.1(AWG14) 1.3(AWG16) 2.1(AWG14) 2.1(AWG14) 2.1(AWG14) 3.3(AWG12) 3.3(AWG12) 8.4(AWG8) 3.3(AWG12) 13.3(AWG6) P ,C 2.1(AWG14) 2.1(AWG14) 2.1(AWG14) 2.1(AWG14) 2.1(AWG14) 3.3(AWG12) 3.3(AWG12)
台达伺服驱动器ASDA-A2参数设置

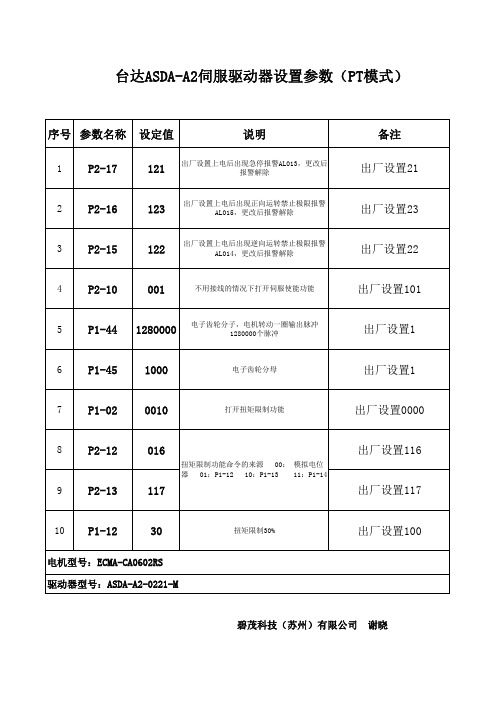
序号参数名称
设定值说明
备注1
P2-17121出厂设置上电后出现急停报警AL013,更改后
报警解除
出厂设置212
P2-16123出厂设置上电后出现正向运转禁止极限报警
AL015,更改后报警解除
出厂设置233
P2-15122出厂设置上电后出现逆向运转禁止极限报警
AL014,更改后报警解除
出厂设置224
P2-10001不用接线的情况下打开伺服使能功能
出厂设置1015
P1-441280000电子齿轮分子,电机转动一圈输出脉冲
1280000个脉冲
出厂设置16
P1-451000电子齿轮分母
出厂设置17
P1-020010打开扭矩限制功能
出厂设置00008
P2-12016
出厂设置116
9
P2-13117出厂设置11710
P1-12
30
扭矩限制30%
出厂设置100
碧茂科技(苏州)有限公司 谢晓
台达ASDA-A2伺服驱动器设置参数(PT模式)
驱动器型号:ASDA-A2-0221-M
电机型号:ECMA-CA0602RS 扭矩限制功能命令的来源 00: 模拟电位器 01:P1-12 10:P1-13 11:P1-14。
台达-A2 伺服电子凸轮使用

凸輪脫離後關掉電子凸輪 功能 (P5-88. X = 0)
Low Word UZ YX 0~8 0~2 0~5 0~1
脫離
P5-88.U=2 凸輪行走到達P5-89的
Bit
設定量後脫離且立即停止 (P5- 89)
P5-88.BA < > 0
脫離時呼叫P5-88.BA 所設定的PR
P5-88 .U=4 Bit
/ Opt B /OB /Opt B /OB
P1-74.B = 1
P1-74.B = 1
主動軸信號來源(6)
脈波控制流程圖
光學尺 輔助編碼器
馬達 主編碼器
CN5 CN2
P1-74 .C 光學尺回授
正反相
P5-17 軸位置輔助編碼器
內部電路
P5-18 軸位置脈波命令
P5-16
CN1
軸位置-
馬達
編碼器 0 1 1 2
主動軸: 主動軸訊號來源
P5-88.Y
離合器: 控制凸輪軸開始跟隨 主動軸運動的時機
P5-88.UZ, P5-87, P5-89
主動軸電子齒輪: 命令脈波解析控制
P5-83, P5-84
凸輪軸電子齒輪: 凸輪曲線對輸出訊號 的解析控制
P1-44, P1-45, P5-19
Delta Confidential
訊號強度回復,無衰減。
主動軸信號來源(4)
脈波 By-pass CN1 傳遞
•P1-74.B=2 是設定CN1為脈波by-pass訊號的來源
主動軸 CN1 OA, /OA, OB, /OB
Delta Confidential
凸輪軸 1 凸輪軸 1 凸輪軸 2 凸輪軸 2 凸輪軸 3凸輪軸 3
台达伺服驱动器ASDAA2参数设置.pdf
序号参数名称
设定值说明
备注1
P2-17121出厂设置上电后出现急停报警AL013,更改后
报警解除
出厂设置212
P2-16123出厂设置上电后出现正向运转禁止极限报警
AL015,更改后报警解除
出厂设置233
P2-15122出厂设置上电后出现逆向运转禁止极限报警
AL014,更改后报警解除
出厂设置224
P2-10001不用接线的情况下打开伺服使能功能
出厂设置1015
P1-441280000电子齿轮分子,电机转动一圈输出脉冲
1280000个脉冲
出厂设置16
P1-451000电子齿轮分母
出厂设置17
P1-020010打开扭矩限制功能
出厂设置00008
P2-12016
出厂设置116
9
P2-13117出厂设置11710
P1-12
30
扭矩限制30%
出厂设置100
碧茂科技(苏州)有限公司 谢晓
台达ASDA-A2伺服驱动器设置参数(PT模式)
驱动器型号:ASDA-A2-0221-M
电机型号:ECMA-CA0602RS 扭矩限制功能命令的来源 00: 模拟电位器 01:P1-12 10:P1-13 11:P1-14。
ASDA-A2参数一览表
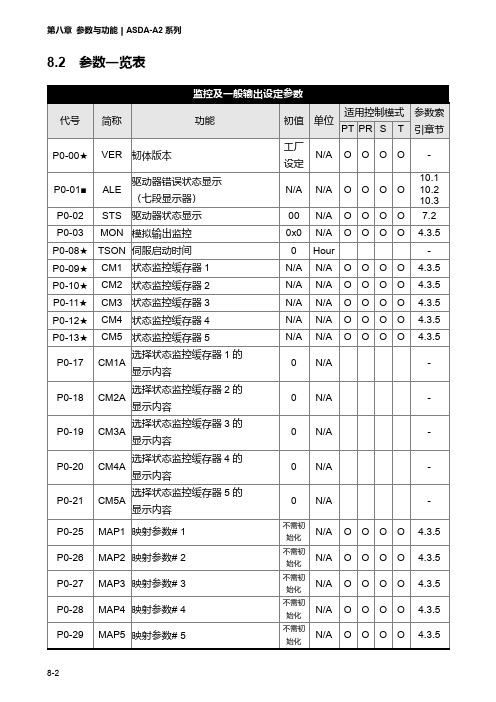
8.2 参数一览表(★) 只读缓存器,只能读取状态值,例如:P0-00、P0-10及P4-00等(▲) Servo On伺服启动时无法设定,例如:P1-00、P1-46及P2-33等( ● ) 必须重新开关机参数才有效,例如:P1-01及P3-00( ■ ) 断电后此参数不记忆设定的内容值,例如:P2-31及P3-06(★) 只读缓存器,只能读取状态值,例如:P0-00、P0-10及P4-00等(▲) Servo On伺服启动时无法设定,例如:P1-00、P1-46及P2-33等( ● ) 必须重新开关机参数才有效,例如:P1-01及P3-00( ■ ) 断电后此参数不记忆设定的内容值,例如:P2-31及P3-06(★) 只读缓存器,只能读取状态值,例如:P0-00、P0-10及P4-00等(▲) Servo On伺服启动时无法设定,例如:P1-00、P1-46及P2-33等( ● ) 必须重新开关机参数才有效,例如:P1-01及P3-00( ■ ) 断电后此参数不记忆设定的内容值,例如:P2-31及P3-06(★) 只读缓存器,只能读取状态值,例如:P0-00、P0-10及P4-00等(▲) Servo On伺服启动时无法设定,例如:P1-00、P1-46及P2-33等( ● ) 必须重新开关机参数才有效,例如:P1-01及P3-00( ■ ) 断电后此参数不记忆设定的内容值,例如:P2-31及P3-06备注: (* )请详见参数说明。
(★) 只读缓存器,只能读取状态值,例如:P0-00、P0-10及P4-00等(▲) Servo On伺服启动时无法设定,例如:P1-00、P1-46及P2-33等( ● ) 必须重新开关机参数才有效,例如:P1-01及P3-00( ■ ) 断电后此参数不记忆设定的内容值,例如:P2-31及P3-06备注: (* )请详见参数说明。
(★) 只读缓存器,只能读取状态值,例如:P0-00、P0-10及P4-00等(▲) Servo On伺服启动时无法设定,例如:P1-00、P1-46及P2-33等( ● ) 必须重新开关机参数才有效,例如:P1-01及P3-00( ■ ) 断电后此参数不记忆设定的内容值,例如:P2-31及P3-06备注: (* )请详见参数说明。
台达A2伺服 运动控制功能

資料陣列
A2新增的資料儲存區域,可以由使用者自由規劃位置, 儲存CAPTURE、COMPARE與ECAM等資料
驅動器資訊-2
系統參數
面版上顯示格式為PX-XX,其資料可讀寫,可由面版按 鈕或通訊方式讀寫,資料為16位元或32位元(依參數而定)
由面板按鍵 設定參數
CAN Open 設定參數 MODBUS支援 RS485/RS232 設定參數 ASDA-SOFT USB 設定參數000 70000 80000 90000 10000
50000
馬逹 位置
0 10000 20000
執行中 命令 Cmd_E
30000 40000
60000
增量命令 60000
60000 70000 80000 90000 10000
50000
馬逹位置 CAP 動作
H H S3 L H L L H S3 E S2 H H E S1 L S3 L ERR H L ERR H H ERR
Y=0,返 回找Z
E S1
S2
Y=1,往 前找Z
S1
Y=2 ,不 找Z Z Pulse PL Signal
S2
ORG Signal
回原點模式-5
P5-04.X:4正轉直接尋找Z脈波作為復歸原點 P5-04.X:5反轉直接尋找Z脈波作為復歸原點 P5-04.Z:極限設定,0顯示錯誤、1方向反轉
00000
映射參數 1
監視變數
驅動器資訊-9
可在ASDA-Soft上,輕易操作監視變數
監視參數設定
資料陣列
驅動器資訊-10
資料陣列為A2系列專有資料暫存器,共有800筆,可提供 電子凸輸、CAPTURE與COMPARE儲存資料用,此資料 陣列對資料的放置位址並無強制規定,使用者必須自已 規劃此空間
台达A2系列伺服电机调试步骤

台达A2系列伺服电机调试步骤调试步骤如下:1.首先,了解A2系列伺服电机的参数和特性。
了解电机的额定转矩、额定转速、电机编号等参数。
同时,了解伺服电机的工作原理和控制方式,以便在调试过程中能够理解和解决问题。
2.确定伺服电机的机械连接。
将电机和负载连接在一起,例如通过联轴器。
确保机械连接牢固可靠,以保证传递电机的转动力矩和转速给负载。
3.进行电气连接。
将伺服电机的输入端(通常是三相交流电源)和输出端(通常是编码器和控制器)与其他电气设备连接好。
检查电气连接是否正确,例如插头是否插紧,线路是否接触良好等。
4.设置参数。
根据实际情况,对伺服电机的控制器进行参数设置。
这些参数包括速度环、位置环、加速度环等。
根据机械系统的特性,调整这些参数以使电机能够稳定工作,并实现所需的性能。
5.进行功率调试。
通过控制器提供的接口,调整电机的工作功率。
测试电机在不同负载和转速下的输出性能,并记录相应的数据。
根据测试结果,调整功率参数或机械系统,以优化电机的功率输出。
6.进行控制调试。
通过控制器的接口设定所需的控制模式,例如位置控制、速度控制或力矩控制等。
测试电机在不同控制模式下的响应性能,并记录相应的数据。
根据测试结果,调整控制参数或机械系统,以实现更好的控制性能。
7.进行保护调试。
根据实际需要,为电机设置保护功能,例如过流保护、过热保护、过载保护等。
通过模拟和测试不同的故障和异常情况,检验保护功能的可靠性和响应性,并记录相应的数据。
根据测试结果,调整保护参数或机械系统,以提高电机的安全性和可靠性。
8.进行稳定性调试。
通过控制器的接口设定所需的稳定性要求,例如阻尼、迟滞等。
测试电机在不同负载、转速或控制模式下的稳定性,并记录相应的数据。
根据测试结果,调整稳定性参数或机械系统,以使电机能够稳定工作在所需的工况下。
9.进行性能验证。
将伺服电机安装在实际工作环境中,并进行性能验证。
测试电机在实际工况下的工作性能、响应性能和稳定性,并记录相应的数据。
台达A2系列伺服电机调试步骤
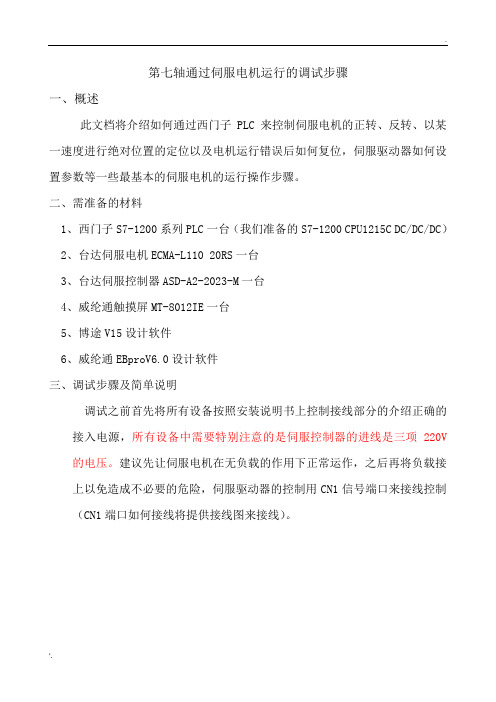
第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C DC/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通EBproV6.0设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1)、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44(分子)和P1-45(分母)电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如0.001mm,相当于一个脉冲想走的距离0.001mm;b.行走速度200mm/s,PLC最大发脉冲数2000000*0.001(目前伺服电机最快20m/min)c.电机编码器分辨率1280000P/Rd.齿轮分度圆直径63.66mme.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可。
台达伺服调试
台达伺服调试何谓伺服的低频摆振?当发生低频摆振时如何处理?若系统刚性不足,在定位命令结束后,即使马达本身已经接近静止,机械传动端仍会出现持续摆动。
低频抑振功能可以用来减缓机械传动端摆动的现象。
低频抑振的范围为~ 。
本功能提供手动设定与自动设定,但目前只有ASDA-A2系列机种支持此功能。
低频抑振方式分为自动及手动方式:(1) 自动设定若用户难以直接知道频率的发生点,可以开启自动低频抑振功能。
此功能会自动寻找低频摆动的频率。
若P1-29设定为1时,系统会先自动关闭低频抑振滤波功能,并开始自动寻找低频的摆动频率。
当自动侦测到的频率维持固定后,P1-29会自动设回0,并会将第一摆动频率设定在P1-25且P1-26设为1。
第二摆动频率设定在P1-27且将P1-28设为1。
当P1-29自动设回零后,低频摆动依然存在,请检查低频抑振P1-26或P1-28是否已被自动开启。
若P1-26与P1-28皆为零,代表没有侦测到任何频率,此时请减少低频摆动检测准位P1-30,并设定P1-29 = 1,重新寻找低频的摆动频率。
(2) 手动设定低频抑振有两组低频抑振滤波器,第一组为参数P1-25 ~ P1-26,第二组为参数P1-27 ~ P1-28。
可以利用这两组滤波器来减缓两个不同频率的低频摆动。
参数P1-25与P1-27用来设定低频摆动所发生的频率,低频抑振功能唯有在低频抑振频率参数设定与真实的摆动频率接近时,才会抑制低频的机械传动端的摆动。
参数P1-26与P1-28用来设定经滤波处理后的响应,当P1-26与P1-28设定越大响应越好,但设太大容易使得马达行走不顺。
参数P1-26与P1-28出厂值默认值为零,代表两组滤波器的功能皆被关闭。
伺服煞车电阻使用时机为何?当伺服驱动器搭配马达运转时,若驱动器面板出现ALE05(回生能量异常)时,代表马达回生产生的能量超过驱动器内建回生电阻所能消耗的能量,此时必须安装回生电阻,提高驱动器回生能量消耗速度。
台达DVP15MC11T与ASDA-A2伺服电机调试方法

台达DVP15MC11T与ASDA-A2伺服电机调试方法台达绝对型编码器伺服系统的参数设置(DVP15MC11T与ASDA-A2 伺服驱动器)一,手动设定参数 :在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 :1.将伺服 P2-08 设置为 10,回归原厂设定。
2.将伺服断电后重新上电。
1.设置伺服驱动器站号(P3-00),伺服从1开始依次设定。
2.设置伺服电机与PLC的通讯速率(P3-01,可以设置为403)3.设置伺服电机的运动模式(P1-01如设置为000B就是CANopen模式搭配台达PLC(DVP15MC11T)),第三位数值可以设置电机运行方向。
4.设置伺服电机的正反向禁止极限,和急停触发。
(P2-10-P2-17) 检测P2-10到P2-18,(P2-10到P2-17,对应DI1到DI8)报警代号:AL013,紧急停止报警,检查P2-10到P2-17中有没有设定为21,将其设定为反向信号,或者设定为0。
报警代号:AL014,反向运作极限报警,检查P2-10到P2-17中有没有设定为22,将其设定为反向信号,或者设定为0。
报警代号:AL015,正向运作极限报警,检查P2-10到P2-17中有没有设定为23,将其设定为反向信号,或者设定为0。
正常限位接DI6,DI7,对应的是P2-15,P2-16,5.设置电机在绝对型编码器下的参数。
首先P2-69(绝对型编码器设定)为1,设置P2-08为271,设置P2-71(绝对位置归零,1:将目前编码器位置归零)为1,然后设置P3-12为100(只适用于P1-01=000B,即CANopen模式),设置完成后断电重启。
6.再设置伺服电的电子齿轮比,在CANopen Builder软件中也可设定,软件中设定后伺服驱动器上面就不用设置。
7.设置驱动器状态显示(P0-02为00,就是电机回授脉冲数)8.伺服电机回原点设置参数为:以下参数也可在CANopen Builder软件中设定,一般设定原点回归模式为:模式17。
台达DVP15MC11T与ASDA-A2伺服电机调试方法

台达绝对型编码器伺服系统的参数设置(DVP15MC11T与ASDA-A2 伺服驱动器)一,手动设定参数 :在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 :1.将伺服 P2-08 设置为 10,回归原厂设定。
2.将伺服断电后重新上电。
1.设置伺服驱动器站号(P3-00),伺服从1开始依次设定。
2.设置伺服电机与PLC的通讯速率(P3-01,可以设置为403)3.设置伺服电机的运动模式(P1-01如设置为000B就是CANopen模式搭配台达PLC(DVP15MC11T)),第三位数值可以设置电机运行方向。
4.设置伺服电机的正反向禁止极限,和急停触发。
(P2-10-P2-17) 检测P2-10到P2-18,(P2-10到P2-17,对应DI1到DI8)报警代号:AL013,紧急停止报警,检查P2-10到P2-17中有没有设定为21,将其设定为反向信号,或者设定为0。
报警代号:AL014,反向运作极限报警,检查P2-10到P2-17中有没有设定为22,将其设定为反向信号,或者设定为0。
报警代号:AL015,正向运作极限报警,检查P2-10到P2-17中有没有设定为23,将其设定为反向信号,或者设定为0。
正常限位接DI6,DI7,对应的是P2-15,P2-16,5.设置电机在绝对型编码器下的参数。
首先P2-69(绝对型编码器设定)为1,设置P2-08为271,设置P2-71(绝对位置归零,1:将目前编码器位置归零)为1,然后设置P3-12为100(只适用于P1-01=000B,即CANopen模式),设置完成后断电重启。
6.再设置伺服电的电子齿轮比,在CANopen Builder软件中也可设定,软件中设定后伺服驱动器上面就不用设置。
7.设置驱动器状态显示(P0-02为00,就是电机回授脉冲数)8.伺服电机回原点设置参数为:以下参数也可在CANopen Builder软件中设定,一般设定原点回归模式为:模式17。
台达伺服调试

何謂伺服的低頻擺振?當發生低頻擺振時如何處理?若系統剛性不足,在定位命令結束後,即使馬達本身已經接近靜止,機械傳動端仍會出現持續擺動。
低頻抑振功能可以用來減緩機械傳動端擺動的現象。
低頻抑振的範圍為 1.0 ~ 100.0Hz。
本功能提供手動設定與自動設定,但目前只有ASDA-A2系列機種支援此功能。
低頻抑振方式分為自動及手動方式:(1) 自動設定若使用者難以直接知道頻率的發生點,可以開啟自動低頻抑振功能。
此功能會自動尋找低頻擺動的頻率。
若P1-29設定為1時,系統會先自動關閉低頻抑振濾波功能,並開始自動尋找低頻的擺動頻率。
當自動偵測到的頻率維持固定後,P1-29會自動設回0,並會將第一擺動頻率設定在P1-25且P1-26設為1。
第二擺動頻率設定在P1-27且將P1-28設為1。
當P1-29自動設回零後,低頻擺動依然存在,請檢查低頻抑振P1-26或P1-28是否已被自動開啟。
若P1-26與P1-28皆為零,代表沒有偵測到任何頻率,此時請減少低頻擺動檢測準位P1-30,並設定P1-29 = 1,重新尋找低頻的擺動頻率。
(2) 手動設定低頻抑振有兩組低頻抑振濾波器,第一組為參數P1-25 ~ P1-26,第二組為參數P1-27 ~ P1-28。
可以利用這兩組濾波器來減緩兩個不同頻率的低頻擺動。
參數P1-25與P1-27用來設定低頻擺動所發生的頻率,低頻抑振功能唯有在低頻抑振頻率參數設定與真實的擺動頻率接近時,才會抑制低頻的機械傳動端的擺動。
參數P1-26與P1-28用來設定經濾波處理後的響應,當P1-26與P1-28設定越大響應越好,但設太大容易使得馬達行走不順。
參數P1-26與P1-28出廠值預設值為零,代表兩組濾波器的功能皆被關閉。
伺服煞車電阻使用時機為何?當伺服驅動器搭配馬達運轉時,若驅動器面板出現ALE05(回生能量異常)時,代表馬達回生產生的能量超過驅動器內建回生電阻所能消耗的能量,此時必須安裝回生電阻,提高驅動器回生能量消耗速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
序号参数名称
设定值说明
备注1
P2-17121出厂设置上电后出现急停报警AL013,更改后
报警解除
出厂设置212
P2-16123出厂设置上电后出现正向运转禁止极限报警
AL015,更改后报警解除
出厂设置233
P2-15122出厂设置上电后出现逆向运转禁止极限报警
AL014,更改后报警解除
出厂设置224
P2-10001不用接线的情况下打开伺服使能功能
出厂设置1015
P1-441280000电子齿轮分子,电机转动一圈输出脉冲
1280000个脉冲
出厂设置16
P1-451000电子齿轮分母
出厂设置17
P1-020010打开扭矩限制功能
出厂设置00008
P2-12016
出厂设置116
9
P2-13117出厂设置11710
P1-12
30
扭矩限制30%
出厂设置100
碧茂科技(苏州)有限公司 谢晓
台达ASDA-A2伺服驱动器设置参数(PT模式)
驱动器型号:ASDA-A2-0221-M
电机型号:ECMA-CA0602RS 扭矩限制功能命令的来源 00: 模拟电位器 01:P1-12 10:P1-13 11:P1-14。