平面控制测量PPT课件
合集下载
井下平面控制测量教程课件

06
井下平面控制测量的未 来发展与展望
技术发展趋势与方向
智能化技术
随着人工智能和机器学习的发展 ,井下平面控制测量将更加智能 化,实现自动化和自主化的测量
。
实时数据处理
通过实时数据处理技术,能够快速 获取测量数据并进行分析,提高测 量效率和精度。
多源数据融合
将不同来源的数据进行融合,提高 测量数据的完整性和可靠性。
井下平面控制测量的应用领域
01
02
03
矿井建设
在矿井建设过程中,需要 进行大量的井下平面控制 测量工作,以确保矿井建 设的顺利进行。
安全生产
通过井下平面控制测量, 可以及时发现矿井中的安 全隐患,为安全生产提供 保障。
资源开发
在资源开发领域,井下平 面控制测量可以为资源开 采提供精确的位置信息, 提高资源开发效率。
数据整理与检查
对外业数据进行整理,检查数据准确性,剔 除异常值。
外业数据采集
按照测量计划进行实地测量,获取各点的平 面坐标数据。
内业数据处理
利用专业软件对数据进行处理,计算各点的 平面坐标,生成测量成果图。
测量后的数据处理与分析
数据后处理与精度分析
资料归档与更新
对测量数据进行后处理,进行精度分 析,评估测量结果的可靠性和精度。
加强技术研发和创新
鼓励企业加强技术研发和创新,推动井下平面控制测量技术的进 步。
建立统一的标准和规范
建立统一的标准和规范,促进井下平面控制测量技术的规范化和标 准化。
加强国际合作与交流
加强国际合作与交流,引进国外先进技术和管理经验,推动井下平 面控制测量技术的国际化和现代化。
THANKS FOR WATCHING
《平面控制测量》课件

土地监测
对土地进行定期的平面控制测量,有助于监测土地利用变化 和非法占用情况。
矿产资源勘探与开发
矿产资源勘探
平面控制测量为矿产资源勘探提供了高精度的定位和测量数据,有助于发现潜在 的矿产资源。
矿产开发
在矿产开发过程中,平面控制测量用于指导矿井、采场的精确施工和资源合理开 发。
水利水电工程
水库建设
04
平面控制测量的应用领 域
城市规划与建设
城市规划
平面控制测量为城市规划提供了精确的空间数据,有助于合理规划城市布局和 功能分区。
城市建设
在城市建设中,平面控制测量用于确保各项设施的准确布局和定位,如道路、 桥梁、建筑物等。
土地资源调查与监测
土地资源调查
通过平面控制测量,可以精确测定土地的边界、面积等数据 ,为土地资源管理和利用提供依据。
准。
02
平面控制测量的技术方 法
三角测量法
01 总结词
02 详细描述
03 适用范围
04 优点
05 缺点
通过使用三角函数和已知 点之间的距离来计算未知 点的位置。
三角测量法是一种利用三 角函数和已知点之间的距 离来计算未知点位置的方 法。它通常需要使用全站 仪或经纬仪等测量仪器, 通过测量角度和距离来确 定点的平面坐标。
目的
确保测量成果的准确性和可靠性,满 足各种工程建设和地理信息采集的需 求。
平面控制测量的分类
根制测量和工程控制测量 。
可分为常规控制测量和GPS控制测量 。
根据坐标系统
可分为绝对控制测量和相对控制测量 。
平面控制测量的基本原则
精度要求
根据不同工程需求,选择合适 的测量方法和精度等级,确保
适用范围:适用于各种 地形和气候条件,具有 全球覆盖能力。
对土地进行定期的平面控制测量,有助于监测土地利用变化 和非法占用情况。
矿产资源勘探与开发
矿产资源勘探
平面控制测量为矿产资源勘探提供了高精度的定位和测量数据,有助于发现潜在 的矿产资源。
矿产开发
在矿产开发过程中,平面控制测量用于指导矿井、采场的精确施工和资源合理开 发。
水利水电工程
水库建设
04
平面控制测量的应用领 域
城市规划与建设
城市规划
平面控制测量为城市规划提供了精确的空间数据,有助于合理规划城市布局和 功能分区。
城市建设
在城市建设中,平面控制测量用于确保各项设施的准确布局和定位,如道路、 桥梁、建筑物等。
土地资源调查与监测
土地资源调查
通过平面控制测量,可以精确测定土地的边界、面积等数据 ,为土地资源管理和利用提供依据。
准。
02
平面控制测量的技术方 法
三角测量法
01 总结词
02 详细描述
03 适用范围
04 优点
05 缺点
通过使用三角函数和已知 点之间的距离来计算未知 点的位置。
三角测量法是一种利用三 角函数和已知点之间的距 离来计算未知点位置的方 法。它通常需要使用全站 仪或经纬仪等测量仪器, 通过测量角度和距离来确 定点的平面坐标。
目的
确保测量成果的准确性和可靠性,满 足各种工程建设和地理信息采集的需 求。
平面控制测量的分类
根制测量和工程控制测量 。
可分为常规控制测量和GPS控制测量 。
根据坐标系统
可分为绝对控制测量和相对控制测量 。
平面控制测量的基本原则
精度要求
根据不同工程需求,选择合适 的测量方法和精度等级,确保
适用范围:适用于各种 地形和气候条件,具有 全球覆盖能力。
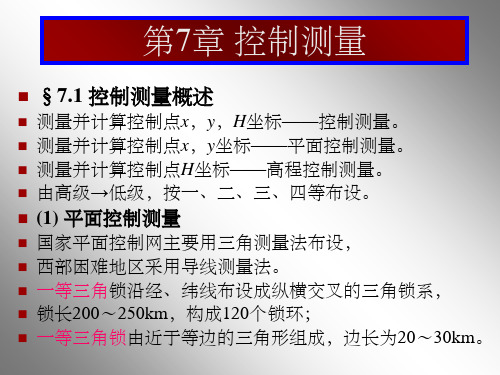
控制测量—平面控制测量概述(工程测量课件)

目的:“从整体到局部”、“先控制后碎部” 作用:限制误差的累积与传播、作为各种细部测量的基准
控制测量
平面控制测量
高程控制测量
2 平面控制测量及其方法
平面控制测量及其 方法
平面控制测量方法 测定控制点平面位置(平面坐标)的工作。 ① 导线测量 ② 三角测量 ③ 三边测量 ④ GPS测量
导线网
三角网
3 平面控制网的建立及等 级划分
200 km
平面控制网的建立 和等级划分
① 国家平面控制网:采用分级布设、 逐级控制的原则,按其精度分为 一、二、三、四等四个等级 。
②城市平面控制网 ③小区域平面控制网:首级控制网、 图根控制网。
200 km
1-一等三角网一般称为一等三角锁 ,沿经纬线方向布设。 2-二等三角网布设于一等三角锁环内
平面控制测量概述
模块三
01
控制测量概述
平面控制测量概述
02
直线定向
03
全站仪传统法导线测量
控制
04
测量
05
全站仪坐标法导线测量 交会法定点
06 07
高程控制测量 卫位定位测量
C目 录 ONTENTS 1 控制测量含义 2 平面控制测量及其方法 3 平面控制网的建立和等级划分
1 控制测量含义
控制测量含义 控制点 (图1~5点) 控制网 控制测量(基本任务:在地面上 建立控制网,即提供地面控制点 的精确可靠的坐标和高程 )
对公路工程而言,平面控制测量主要有两方面的作用,一 是用于中桩测量,二是用于绘地形图。只要等级相同,精 度要求就应相同。
《公路勘测规范》(JTG C10—2007)规定:公路工程平 面控制测量其等级依次为二等、三等、四等、一级和二级。
控制测量
平面控制测量
高程控制测量
2 平面控制测量及其方法
平面控制测量及其 方法
平面控制测量方法 测定控制点平面位置(平面坐标)的工作。 ① 导线测量 ② 三角测量 ③ 三边测量 ④ GPS测量
导线网
三角网
3 平面控制网的建立及等 级划分
200 km
平面控制网的建立 和等级划分
① 国家平面控制网:采用分级布设、 逐级控制的原则,按其精度分为 一、二、三、四等四个等级 。
②城市平面控制网 ③小区域平面控制网:首级控制网、 图根控制网。
200 km
1-一等三角网一般称为一等三角锁 ,沿经纬线方向布设。 2-二等三角网布设于一等三角锁环内
平面控制测量概述
模块三
01
控制测量概述
平面控制测量概述
02
直线定向
03
全站仪传统法导线测量
控制
04
测量
05
全站仪坐标法导线测量 交会法定点
06 07
高程控制测量 卫位定位测量
C目 录 ONTENTS 1 控制测量含义 2 平面控制测量及其方法 3 平面控制网的建立和等级划分
1 控制测量含义
控制测量含义 控制点 (图1~5点) 控制网 控制测量(基本任务:在地面上 建立控制网,即提供地面控制点 的精确可靠的坐标和高程 )
对公路工程而言,平面控制测量主要有两方面的作用,一 是用于中桩测量,二是用于绘地形图。只要等级相同,精 度要求就应相同。
《公路勘测规范》(JTG C10—2007)规定:公路工程平 面控制测量其等级依次为二等、三等、四等、一级和二级。
《控制测量》PPT课件
最长不应超过平均边长的两倍, 相邻边长悬殊不应太大。 ⑤ 导线均匀分布在测区,便于控制整个测区。
导线点位埋设
泥土地面,点位上打木桩,桩顶钉小钉——临时性标志 碎石或沥青路面,顶上凿十字纹的大铁钉代替木桩。 混凝土场地或路面,钢凿凿十字纹,涂红油漆。 需长期保存导线点,埋设混凝土导线点标石。 导线点应分等级统一编号,便于测量资料统一管理。 为便于观测时寻找, 在点位附近房角或电线杆等明显地物上 用红油漆标明指示导线点的位置。 为每个导线点绘制点之记 注记地名、路名、导线点编号 及导线点距离邻近明显地物点的距离。
§7.3 导线测量
(1) 导线的布设 将相邻控制点连成直线构成的折线——导线, 控制点称为导线点。 导线测量——依次测定导线边的水平距离 与两相邻导线边的水平夹角, 根据起算数据,推算各边的方位角,求出导线点的平面
坐标。 水平角用经纬仪测量, 边长用光电测距仪或钢尺丈量, 也可使用全站仪测量水平角与边长。 建立小地区平面控制网的常用方法, 地物分布复杂的建筑区,视线障碍多的隐蔽区和带状区, 布设形式有闭合导线、附合导线和支导线。
青藏高原导线
城市或厂矿地区, 应在国家等级控制点的基础上, 根据测区的大小、城市规划或施工测量的要求, 布设不同等级的城市平面控制网, 供地形测图和测设建、构筑物时使用。 建立城市平面控制网可采用GPS测量、 三角测量、各种形式边角组合测量和导线测量方法。
(2) 高程控制测量
二等三角测量有两种布网形式, 一是由纵横交叉的两条二等基本锁 将一等锁环划分成4个大致相等的部分, 这4个空白部分用二等补充网填充,称纵横锁系布网方案; 二是在一等锁环内布设全面二等三角网的全面布网方案。 二等基本锁边长20~25km,二等网的平均边长13km。 一等锁两端和二等网中间, 测定起算边长、天文经纬度和方位角。 国家一、二等网合称为天文大地网, 我国天文大地网于1951年开始布设,1961年基本完成, 1975年修补测工作全部结束。 三、四等三角网为在二等三角网内进一步加密。
导线点位埋设
泥土地面,点位上打木桩,桩顶钉小钉——临时性标志 碎石或沥青路面,顶上凿十字纹的大铁钉代替木桩。 混凝土场地或路面,钢凿凿十字纹,涂红油漆。 需长期保存导线点,埋设混凝土导线点标石。 导线点应分等级统一编号,便于测量资料统一管理。 为便于观测时寻找, 在点位附近房角或电线杆等明显地物上 用红油漆标明指示导线点的位置。 为每个导线点绘制点之记 注记地名、路名、导线点编号 及导线点距离邻近明显地物点的距离。
§7.3 导线测量
(1) 导线的布设 将相邻控制点连成直线构成的折线——导线, 控制点称为导线点。 导线测量——依次测定导线边的水平距离 与两相邻导线边的水平夹角, 根据起算数据,推算各边的方位角,求出导线点的平面
坐标。 水平角用经纬仪测量, 边长用光电测距仪或钢尺丈量, 也可使用全站仪测量水平角与边长。 建立小地区平面控制网的常用方法, 地物分布复杂的建筑区,视线障碍多的隐蔽区和带状区, 布设形式有闭合导线、附合导线和支导线。
青藏高原导线
城市或厂矿地区, 应在国家等级控制点的基础上, 根据测区的大小、城市规划或施工测量的要求, 布设不同等级的城市平面控制网, 供地形测图和测设建、构筑物时使用。 建立城市平面控制网可采用GPS测量、 三角测量、各种形式边角组合测量和导线测量方法。
(2) 高程控制测量
二等三角测量有两种布网形式, 一是由纵横交叉的两条二等基本锁 将一等锁环划分成4个大致相等的部分, 这4个空白部分用二等补充网填充,称纵横锁系布网方案; 二是在一等锁环内布设全面二等三角网的全面布网方案。 二等基本锁边长20~25km,二等网的平均边长13km。 一等锁两端和二等网中间, 测定起算边长、天文经纬度和方位角。 国家一、二等网合称为天文大地网, 我国天文大地网于1951年开始布设,1961年基本完成, 1975年修补测工作全部结束。 三、四等三角网为在二等三角网内进一步加密。
《控制测量》课件

总结和展望
1 控制测量的未来发展
展望控制测量领域的未来趋势和发展方向,以及可能的创新和突破。
3
故障诊断和修复
当控制测量系统发生故障时,如何及时诊断问题并进行修复,确保系统的正常运 行。
实例和案例分析
工业应用案例
通过介绍一些成功ቤተ መጻሕፍቲ ባይዱ工业应用案例,展示控制测量在实际生产中的重要作用和价值。
实验室研究案例
分享一些基于控制测量的实验室研究案例,探索新的控制测量技术和应用领域。
成功的项目
介绍一些成功的控制测量项目,分享项目实施的经验和教训。
基本概念和原理
1 控制系统的组成部分
了解控制系统中的传感器、执行器、控制器等组成部分,以及它们之间的关系和作用。
2 测量方法和技术
学习各种控制测量方法和技术,包括传感器选择、信号处理、校准等。
控制测量的应用领域
工业控制
自动化系统
实时监测
将控制测量应用于工业生产和制 造过程中,提高生产效率和质量。
《控制测量》PPT课件
控制测量是一门关于控制系统和测量技术的课程,通过本课程学习,您将了 解控制测量的基本概念和原理以及其在工业控制、自动化系统和实时监测等 领域的应用。
课程介绍
课程目标
通过学习本课程,您将掌握控制测量的核心概念 和技术,以及在实际应用中解决问题的能力。
为什么学习控制测量
控制测量是现代工业和自动化领域的重要基础, 掌握其原理和应用可以提升工作能力和竞争力。
在自动化系统中使用控制测量技 术,实现自动化操作和精确控制。
利用控制测量技术对设备和系统 进行实时监测,以及数据分析和 故障诊断。
控制测量的挑战和解决方案
1
高精度测量
《控制测量教程》课件

量技术的高级应用包括自适应控制、系统辨识和建模以及状态观测和 估计。我们将详细介绍这些应用的原理和实践。
实践案例
通过工业自动化系统设计、智能家居控制系统和生物医疗传感器应用等实践案例,我们将展示控制测量 技术在不同领域的应用和创新。
总结
通过学习本课件,您将掌握控制测量的基本原理和设计方法,并能够实践控制测量技术应用。让我们共 同推动控制测量技术的创新和发展!
基础知识
本节将介绍传感器的作用原理、信号调理和放大、数字信号处理以及传感器选择和安装等控制测量的基 础知识。
控制系统设计
如何选择控制器?什么是反馈和控制算法?模型和仿真又是什么?在本节中,我们将深入探讨控制系统 设计的要点。
测量系统设计
选择合适的测量器、掌握接口技术以及分析和校准等是测量系统设计的关键。本节内容将帮助您了解测 量系统设计的方法和技术。
《控制测量教程》PPT课 件
控制测量教程PPT课件是为了让大家了解控制测量的基本原理、设计方法和应 用领域。本课程将详细介绍控制测量的基础知识、控制系统设计、测量系统 设计、高级应用以及实践案例。
简介
控制测量是什么?为什么要学习控制测量?控制测量的应用领域有哪些?在 本节中,我们将一一解答这些问题。
实践案例
通过工业自动化系统设计、智能家居控制系统和生物医疗传感器应用等实践案例,我们将展示控制测量 技术在不同领域的应用和创新。
总结
通过学习本课件,您将掌握控制测量的基本原理和设计方法,并能够实践控制测量技术应用。让我们共 同推动控制测量技术的创新和发展!
基础知识
本节将介绍传感器的作用原理、信号调理和放大、数字信号处理以及传感器选择和安装等控制测量的基 础知识。
控制系统设计
如何选择控制器?什么是反馈和控制算法?模型和仿真又是什么?在本节中,我们将深入探讨控制系统 设计的要点。
测量系统设计
选择合适的测量器、掌握接口技术以及分析和校准等是测量系统设计的关键。本节内容将帮助您了解测 量系统设计的方法和技术。
《控制测量教程》PPT课 件
控制测量教程PPT课件是为了让大家了解控制测量的基本原理、设计方法和应 用领域。本课程将详细介绍控制测量的基础知识、控制系统设计、测量系统 设计、高级应用以及实践案例。
简介
控制测量是什么?为什么要学习控制测量?控制测量的应用领域有哪些?在 本节中,我们将一一解答这些问题。
平面控制测量
按方法分:天文测量、常规测量(三角测量、导线测量、水准测量)、卫星定 位测量
一.控制测量的概念
3.有关名词
控制点:对整个测区起控制作用的测量标志点。 控制网:由按一定规范布设,由一系列相互联系的
控制点所构成的网状几何图形。 图根控制网:直接为测图而建立的控制网。 图根点: 图根控制网中的控制点。
控制测量: 为建立控制网所进行的测量工作。
庆
食品店
路
8.75m D5
中
山
中西 北 18-1 12.36m
路
2.导线边长测量
——测定导线各边长(往返丈量)。
精度要求:符合规范规定。
例:图根导线
测距方法: 钢尺量距 电磁波测距
D往 D返 1 D平均 3000
2 导线测量
一.导线测量概述 二.导线测量的外业 三.导线测量的内业计算
导线测量概述
导线测量是平面控制测量中最常 用的方法。
闭合导线
导线的已知点和新建点组成的若 干条直线(即导线边)联结成一系 列折线或闭合多边形。
附合导线
导线测量时,通常只需要前后两 点相互通视。
闭合导线和附合导线也称为单导 线,结点导线和两个环以上的导 线称为导线网。
导线各边长DB1,D12,……,D51。
2.附合导线
AB、CD为已知边,点1、2、3、4为新建导线点。
已知数据:AB,XB,YB;CD,XC,YC。
C CD
B
1 DB1
D12
2 D23
AB B
1
2
3 D34 4 D4C C
3
4 (XC,YC)
D
(XB,YB)
附合导线图
A
观测数据:连接角B 、C ; 导线转折角1, 2, 3 ,4 ;
一.控制测量的概念
3.有关名词
控制点:对整个测区起控制作用的测量标志点。 控制网:由按一定规范布设,由一系列相互联系的
控制点所构成的网状几何图形。 图根控制网:直接为测图而建立的控制网。 图根点: 图根控制网中的控制点。
控制测量: 为建立控制网所进行的测量工作。
庆
食品店
路
8.75m D5
中
山
中西 北 18-1 12.36m
路
2.导线边长测量
——测定导线各边长(往返丈量)。
精度要求:符合规范规定。
例:图根导线
测距方法: 钢尺量距 电磁波测距
D往 D返 1 D平均 3000
2 导线测量
一.导线测量概述 二.导线测量的外业 三.导线测量的内业计算
导线测量概述
导线测量是平面控制测量中最常 用的方法。
闭合导线
导线的已知点和新建点组成的若 干条直线(即导线边)联结成一系 列折线或闭合多边形。
附合导线
导线测量时,通常只需要前后两 点相互通视。
闭合导线和附合导线也称为单导 线,结点导线和两个环以上的导 线称为导线网。
导线各边长DB1,D12,……,D51。
2.附合导线
AB、CD为已知边,点1、2、3、4为新建导线点。
已知数据:AB,XB,YB;CD,XC,YC。
C CD
B
1 DB1
D12
2 D23
AB B
1
2
3 D34 4 D4C C
3
4 (XC,YC)
D
(XB,YB)
附合导线图
A
观测数据:连接角B 、C ; 导线转折角1, 2, 3 ,4 ;
第九章__平面控制测量
(2) 后一条直线的坐标方位角等于相邻的前一 条直线的坐标方位角±180°后再加左折角或 减右折角。
三、导线测量的近似平差计算
支导线的计算
其计算步骤如下: 1.由A、M两点的坐标,使用坐标反算公式计
算出坐标方位角αAM。 2.由αAM起始,并根据观测角β1、β2…推算出
各边的坐标方位角。 3.由各边的坐标方位角及边长,按正算公式
控制测量的任务
在测绘各种大比例尺地形图时,要进 行必要的图根控制测量;在工程建设施工 阶段,要进行一定精度的施工控制测量; 在工程竣工后的营运阶段,为进行各种变 形观测而作的专用控制测量。由此可见, 控制测量是进行其他各项测量工作的基础, 它具有传递点位坐标并高精度控制全局的 作用,具有限制测量误差的传播和积累的 作用。
控制测量作业内容
技术设计、实地选点、标石埋设、观 测和平差计算等主要步骤。在常规的高等 级平面控制测量中,当某些方向受地形条 件限制不能使相邻控制点直接通视时,就 需要在控制点上建造觇标。采用GPS定 位技术建立平面控制网,由于不要求相邻 点之间通视,因此不需要建造觇标。
布设控制网的要求
控制网中控制点坐标是由起算数据和观测 数据经平差计算得到的。控制网中只有必要的 一套起始数据,例如三角网中已知一个点的坐 标、一条边长和一边的坐标方位角,这种控制 网称为独立网。如果控制网中已知数据多于必 要的起算数据,则这种控制网称为非独立网。 控制网中的观测数据按控制网的种类不同而不 同,有水平角或水平方向、边长、高差以及三 角高程测量的竖直角或天顶距,外业观测工作 完成后,应对观测成果进行整理和检核,保证 观测成果满足限差要求,然后进行平差计算。 对于高等级控制网需要进行严密平差计算,而 低级的控制网可以采用近似平差计算。
三、导线测量的近似平差计算
支导线的计算
其计算步骤如下: 1.由A、M两点的坐标,使用坐标反算公式计
算出坐标方位角αAM。 2.由αAM起始,并根据观测角β1、β2…推算出
各边的坐标方位角。 3.由各边的坐标方位角及边长,按正算公式
控制测量的任务
在测绘各种大比例尺地形图时,要进 行必要的图根控制测量;在工程建设施工 阶段,要进行一定精度的施工控制测量; 在工程竣工后的营运阶段,为进行各种变 形观测而作的专用控制测量。由此可见, 控制测量是进行其他各项测量工作的基础, 它具有传递点位坐标并高精度控制全局的 作用,具有限制测量误差的传播和积累的 作用。
控制测量作业内容
技术设计、实地选点、标石埋设、观 测和平差计算等主要步骤。在常规的高等 级平面控制测量中,当某些方向受地形条 件限制不能使相邻控制点直接通视时,就 需要在控制点上建造觇标。采用GPS定 位技术建立平面控制网,由于不要求相邻 点之间通视,因此不需要建造觇标。
布设控制网的要求
控制网中控制点坐标是由起算数据和观测 数据经平差计算得到的。控制网中只有必要的 一套起始数据,例如三角网中已知一个点的坐 标、一条边长和一边的坐标方位角,这种控制 网称为独立网。如果控制网中已知数据多于必 要的起算数据,则这种控制网称为非独立网。 控制网中的观测数据按控制网的种类不同而不 同,有水平角或水平方向、边长、高差以及三 角高程测量的竖直角或天顶距,外业观测工作 完成后,应对观测成果进行整理和检核,保证 观测成果满足限差要求,然后进行平差计算。 对于高等级控制网需要进行严密平差计算,而 低级的控制网可以采用近似平差计算。
第七章控制测量ppt课件全
Rb Rc
R R
c a
Ra
Rb
二、后方交会
通常观测四个已知点,组成两组后方交会,分别计算P点的两 组坐标值,求其较差。若较差在限差之内,即可取两组坐标的平均 值作为P点的最后坐标。
过三个已知点构成的圆称为危险圆。
待定点P 不能位于危险圆的圆周上,否 则P点将不能惟一确定。
若接近危险圆(待定点P至危险圆圆周 的距离小于危险圆半径的五分之一),确 定P点的可靠性将很低,
导线全长闭合差
fD fx2fy2
导线全长相对闭合差
1 k
D/ fD
(4)坐标增量闭合差的计算和分配
当全长相对闭合差不大于容许值时,可将坐标增量闭合差反符 号按边长成正比例地改正它们的坐标增量,其改正数为:
v x ij
fx D
D
ij
v y ij
fy D
D
ij
改正后的坐标增量为
xij xij vxij
一、前方交会
三点前方交会
为了避免错误并提高待定点的精度,一般 测量中都要求布设有三个已知点的前方交会。
计算时,分两组利用余切公式计算P点坐 标。若两组坐标的较差在允许限差内,则取两 组坐标的平均值作为P 点的最后坐标。
由未知点至两相邻已知点方向间的夹角称 为交会角(γ)。
前方交会测量中,要求交会角一般应大于 30°并小于150°。
yij
yij
vyij
2.附合导线计算
(5)坐标计算 根据起始点坐标及改正后的坐标增量,依次计算各导线点的坐
标。 由推算而得的B 点的坐标应与已知值完全相符,以此作为计算
检核。
3.闭合导线的计算
闭合导线的计算步骤与附合导线完 全相同,仅在角度闭合差和坐标增量闭 合差的计算上有所不同。
控制测量ppt课件
坐标增量:
ΔXAB=DAB·cosαAB
x
ΔYAB=DAB·sinαAB B点坐标:
XB
B
XB=XA+ΔXAB
α
DAB
ΔXAB
YB=YA+ΔYAB
XA A
❁注意:坐标增量的正负取决于 O 直线方位角的象限。
YA
ΔYAB YB
完整最新版课件
39
二、支导线内业计算
1. 由A、M两点的坐标,反算出坐标方位角αAM。 2. 由αAM起始,按β1、β2……角推算S12、S23……各边 的坐标方位角αA2、α23……。 3. 由各边的坐标方位角及边长,正算两相邻导线点的坐标 增量ΔxA2、ΔyA2,Δx23,Δy23……。 4. 依次推算2、3、…各导线点的坐标x2、y2、x3,y3、…。
完整最新版课件
25
小地区平面控制网,应根据测区面积的大小按精度要求 分级建立。在全测区范围内建立的精度最高的控制网, 称为首级控制网;直接为测图而建立的控制网,称为图 根控制网。首级控制网和图根控制网的关系如表6-2所示。
首级控制网和图根控制网
测区面积/km 1~10 0.5~2
0.5以下
首级控制网 一级小三角或一级导线 二级小三角或二级导线
建筑工程放样,在国家控制网的控制下而建立的控制网, 称为城市控制网。
城市平面控制网分为二、三、四等和一、二级小三角网, 或一、二、三级导线网。最后,再布设直接为测绘大比 例尺地形图所用的图根小三角和图根导线。
城市高程控制网分为二、三、四等,在四等以下再布设 直接为测绘大比例尺地形图用的图根水准测量。
比例尺
1:500 1:1000 1:2000
附合导线长 度
(m)
ΔXAB=DAB·cosαAB
x
ΔYAB=DAB·sinαAB B点坐标:
XB
B
XB=XA+ΔXAB
α
DAB
ΔXAB
YB=YA+ΔYAB
XA A
❁注意:坐标增量的正负取决于 O 直线方位角的象限。
YA
ΔYAB YB
完整最新版课件
39
二、支导线内业计算
1. 由A、M两点的坐标,反算出坐标方位角αAM。 2. 由αAM起始,按β1、β2……角推算S12、S23……各边 的坐标方位角αA2、α23……。 3. 由各边的坐标方位角及边长,正算两相邻导线点的坐标 增量ΔxA2、ΔyA2,Δx23,Δy23……。 4. 依次推算2、3、…各导线点的坐标x2、y2、x3,y3、…。
完整最新版课件
25
小地区平面控制网,应根据测区面积的大小按精度要求 分级建立。在全测区范围内建立的精度最高的控制网, 称为首级控制网;直接为测图而建立的控制网,称为图 根控制网。首级控制网和图根控制网的关系如表6-2所示。
首级控制网和图根控制网
测区面积/km 1~10 0.5~2
0.5以下
首级控制网 一级小三角或一级导线 二级小三角或二级导线
建筑工程放样,在国家控制网的控制下而建立的控制网, 称为城市控制网。
城市平面控制网分为二、三、四等和一、二级小三角网, 或一、二、三级导线网。最后,再布设直接为测绘大比 例尺地形图所用的图根小三角和图根导线。
城市高程控制网分为二、三、四等,在四等以下再布设 直接为测绘大比例尺地形图用的图根水准测量。
比例尺
1:500 1:1000 1:2000
附合导线长 度
(m)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)计算坐标增量闭合差:
f x x测 x理 x测 f y y测 y理 y测
➢导线全长闭合差:
fD
f
2 x
f
2 y
➢导线全长相对闭合差: K fD 1 D D / fD
18
(2)分配坐标增量闭合差
若K<1/2000(图根级),则将fx、fy以相 反符号,按边长成正比分配到各坐标增量 上去。并计算改正后的坐标增量。
5
6
任务二 导 线 测 量
一、基本概念
导线:选定的控制点依序相连成折线形式,这 样的路线称为导线。
导线网:数条导线纵横交织组成网络,称为导 线网。
导线点:导线或导线网中的各个转折点称为导 线点。
导线测量法:测定导线各边的边长及转折角, 并化算到某一平面上,根据起始数据推算各边 的方位角及各点坐标,这种测量方法称为导线 测量法。
2
二、控制测量分类
按内容分: 平面控制测量:只测定控制点平面位置的控制测量。 高程控制测量:只是测定控制点高程位置的控制测量。 按精度分:一等、二等、三等、四等;一级、二级、
三级、四级。
按方法分:天文测量、常规测量(三角测量、导线测量、 水准测量)、卫星定位测量(GPS)。 按区域分:国家控制测量、城市控制测量、小区域工 程控制测量。
算改正数:
Vi f / n
计算检核:
Vi f
16
(3)改正后的角值: 改 测 Vi
3、导线边坐标方位角的推算;
前
后
180
左 右
4、计算各边坐标增量;
xi Di cosi yi Di sini
5、坐标增量闭合差计算与调整;
理论上
x理 0
y理 0
实际上
f x
x
测
f y y测 17
Vxi
fx D
Di
Vyi
f
y
D
Di
vx fx vy fy
xˆi xi Vxi yˆi xi Vyi
19
6、坐标计算
根据起始点的已知坐标和经改正的新的坐 标增量,来依次计算各导线点的坐标。
x前 x后 xˆ改 y前 y后 yˆ改
x2 x1 xˆ12 y2 y1 yˆ12
3
三、平面控制测量
常规方法:三角测量、导线测量、GPS测量。 平面控制网:
国家平面控制网 小区域平面控制网
4
(一)、国家平面控制网
在全国范围内建立的平面控制网。
国家平面控制网的建立方法有两种:
三角测量法
一、二、三、四 等
导线测量法
一、二、三、四 等
(二)、小区域平面控制网
首级控制网
图根控制网
图根控制网的建立方法,通常有导线测量法、小三角测量法、交会法等。
(2)相邻点间必须通视,以便于测角和测距。如果 采用钢尺量距的方法测定边长,则要求相邻两点间的 地势比较平缓且没有障碍。
(3)相邻两导线边长应大致相等,以防测角时因望远 镜调焦幅度过大引起测角误差。
( 4 ) 导 线 总 长 应 不 超 过 0.8Mm ( M 为 测 图 比 例 尺 分
母);边长最短不应短于50m,最长不应超过相应的
•当与高级控制点连测时,需进行连接测量。
N
2
A
BA
DA1 1
B
A
1
5
3
4
13
3.测边
◆ 测定各个导线边的边长(两导线点间的水平距 离)。 ◆ 边长测定: 视距法测距
钢尺量距 电磁波测距 ◆ 测距精度≤1/2000。
14
四、 导线测量的内业计算
(一)计算前准备工作 1、检查外业观测手薄(包括水平角观测、边长观测、 方位角观测等),确认观测、记录及计算成果正确无 误。 2、绘制导线略图。略图是一种示意图,绘图比例、 用线粗细没有严格要求,但应注意美观、大方,大小 适宜,与实际图形保持相似,且与实地方位大体一致。 所有的已知数据(已知方位角,已知点坐标)和观测 数据(水平角值,边长)应正确抄录于图中,注意字 迹工整,位置正确。
20
闭合导线坐标计算表
观测角 改
点 号
(右角)
正 数
°´"
˝
改正角 °´"
坐标 方位角αBiblioteka 距离 D m增量计算值
Δx
Δy
m
m
改正后增量
Δx
Δy
m
m
坐标值 点
x
y号
m
m
A
133 46 40
239.18
+0.03
0 -165.45
-165.48 +172.69
规定。
11
点选好后,打下大木桩或埋设混凝土标石以示点位。
点之记
混凝土桩(永久性)
木桩(临时性) 12
2 .测角
• 一般采用J6经纬仪测回法测量。两个以上方向组成的角
也可用方向法。
• 在导线的各转折点上观测水平角。导线转折角有左角和 右角之分。一般观测左角。对于闭合导线,由于前进顺序 为逆时针方向,故左角亦即多边形的内角。
项目六 平面控制测量
任务一、平面控制网概述 任务二、导 线 测 量
1
任务一 平面控制网概述
一、概念
控制点 :具有精确可靠平面坐标或高程的测量基准 点。(x、y、H)
控制测量:在整个测区范围内均匀选定若干数量的 控制点,以较高精度的测量方法测出这些点的坐标 和高程,这项工作称为控制测量。
控制网:选定的控制点按一定规则相互连接起来组 成的网络。
B
附合导线
A
12 3
4
D
C
9
3.支导线 从某一已知点出发,顺序连接 各个未知点,既不闭合又不附合的导线,称 为支导线。如图所示:
B 支导线
A
1
2
注:闭合导线、附合导线均有严格的几何条件供检核,支导线没有 检核条件,一般不宜采用。特殊情况最多只能支出两点。
10
三、 导线测量的外业工作
1 .选点
(1)点位应选在视野开阔、土质坚实,便于安置仪 器和测绘地形的地方。
注:本任务只讨论小范围测区大比例尺测图图根级的平面控制测量。
7
二、导线的布设形式
导线布设的形式可分为:闭合导线、附合导线、 支导线三种形式。
1.闭合导线 从某一已知点出发,顺序连结各个
未知点,最后又闭合到该已知点的导线叫闭合导线。
如图所示。 闭合导线
5
4
B
A
3
1
2
8
2.附合导线 从某一已知点出发,顺序连 接各个未知点,最后又附合到另一已知 点的导线叫附合导线。如图所示。
3、绘制计算表格。在对应的列表中抄录已知数据和观 测数据,注意应确认抄录无误。在点名或点号一列应 按推算坐标的顺序(亦即前进顺序)填写点名和点号。
15
1、绘制计算草图, 在图上填写已知数
据和观测数据(如上图);绘制表格填写已
知数据;
2、角度闭合差的计算与调整; (1)计算角度闭合差:
=测-理= 测-(n-2)180° (2)若在限差内,则按反号平均分配原则,计