减速电机驱动电路
MC33035内部电路图

产品说明MC33035是高性能第二代单片无刷直流马达控制电路。
它包含实现开环、三相或四相马达控制所需的全部功能。
此电路包括转子位子检测器,温度补偿基准,锯齿波振荡器,三个集电极开路的高速驱动器,和三个高电流的图腾柱低速驱动器,适用于驱动功率MOSFET 管。
此控制器还包含一些有保护特点的电路,如欠电压锁定,时间延迟可选的周期接周期限流控制,内部过热保护电路和一个独特的故障输出,易于和微控制系统连接。
典型的马达控制功能包括开环速率,前进/后退方向,运行使能和动态制动。
MC33035是专门为电气相位为60°/300°或120°/240°的马达电路设计的,并能有效的控制无刷直流马达。
DIP-24SOP-24• 10 ~ 30 V 工作电压 • 欠电压锁定• 6.25 V 基准传感器工作电源 • 闭环伺服应用中的误差放大器• 高电流驱动,可控制外部三相MOSFET 电桥• 周期接周期限流控制 • 管脚输出的电流感应基准 • 内部过热保护电路• 60°/300°或120°/240°传感器相位可选 • 通过外部MOSFET 电桥可有效控制产品归类产品型号工作温度封装MC33035DW SOP–24 MC33035PTA =-40° to +85°CDIP-24管脚连接低速驱动输出传感器输入/PWN 输入°选择典型原理图此器件包含了285个有效的晶体管。
极限参数参数符号范围单位电源电压VCC 40 V数字输入(管脚3, 4, 5, 6, 22, 23) – VrefV 振荡器输入电流(源电流或陷电流)IOSC 30 mA 误差放大器输入电压范围(管脚 11, 12,注1)VIR –0.3 ~ Vref V误差放大器输出电流(源电流或陷电流,注2)IOut 10 mA 电流检测输入电压(管脚9,15)VSense –0.3~5.0V故障输出电压VCE(Fault) 20 V故障输出陷电流ISink(Fault) 20 mA高速驱动电压(管脚1, 2, 24) VCE(top) 40 V高速驱动陷电流(管脚1, 2, 24) ISink(top) 50 mA低速驱动工作电压(管脚 18) VC 30V 低速驱动输出电流(源电流或陷电流,管脚19, 20, 21)IDRV 100 mA 功率消耗和热特性DIP-24最大功耗@ TA = 85°C 过热电阻,结对空SOP-24最大功耗@ TA = 85°C 热敏电阻,结对空电阻PDRθJAPDRθJA86775650100mW°C/WmW°C/W工作结温TJ 150°C环境温度TA –40 ~ +85 °C贮存温度Tstg –65~+150°C电气特性(除非特别制定,否则VCC = VC = 20 V, RT = 4.7 k, CT = 10 nF, TA = 25°C)参数符号最小值典型值最大值单位基准部分基准输出电压(Iref = 1.0 mA) TA = 25°CTA = –40°~ +85°C Vref5.95.826.24–6.56.57V线路调整(VCC = 10~30 V, Iref = 1.0mA)Regline -- 1.5 30 mV负载调整(Iref = 1.0~20 mA) Regload -- 16 30 mV输出短路电流(注 3) ISC 40 75 – mA基准欠电压锁定阈值 Vth4.04.55.0V误差放大器输入偏移电压(TA = –40° ~ +85°C) VIO -- 0.4 10 mV输入偏移电流(TA = –40°∼+85°C) IIO -- 8.0 500 nA输入偏置电流(TA = –40° ~ +85°C) IIB -- -46 -1000 nA输入共模电压VICR (0 V ~ Vref) V开环电压增益(VO = 3.0 V, RL = 15 k) AVOL 70 80 -- dB输入共模抑制比 CMRR5586--dB 电源抑制比(VCC = VC = 10 to 30 V) PSRR 65 105 -- dB输出电压摆浮高电平状态(RL = 15 k to Gnd) 低电平状态(RL = 15 k to Vref)VOHVOL4.6–5.30.5–1.0V振荡单元振荡频率 fOSC222528kHz 频率随电压改变(VCC = 10~30 V) ∆fOSC/∆V – 0.01 5.0 %锯齿波峰值电压 VOSC(P)–4.14.5V锯齿波谷值电压 VOSC(V)1.21.5–V逻辑输入输入阈值电压(管脚3, 4, 5, 6, 7, 22, 23)高电平状态低电平状态VIHVIL3.0--2.21.7--0.8V传感器输入(管脚4, 5, 6)高电平输入电流(VIH = 5.0 V) 低电平输入电流(VIL = 0 V)IIHIIL-150-600-70-337-20-150µA前进/后退,60°/120°可选(管脚3, 22, 23)高电平输入电流(VIH = 5.0 V) IIHIIL-75-300-36-175-10-75µA低电平输入电流(VIL = 0 V)输出使能高电平状态输入电流(VIH = 5.0 V) 低电平状态输入电流VIL =0V IIHIIL-60-60-29-29-10-10µA限流比较仪阈值电压 Vth85101115mV 输入共模电压 VICR--3.0--V输入偏置电流 IIB---0.9-5.0µA输出和电源单元高速驱动输出饱和陷电压(Isink = 25 mA) -- 0.51.5 V高速驱动输出关闭状态漏电流(VCE = 30 V) -- 0.06100 µA高速驱动输出转换时间(CL = 47 pF, RL = 1.0 k)上升时间下降时间trtf––10726300300ns低速驱动输出电压高电平状态(VCC = 20 V, VC = 30 V, Isource = 50 mA)低电平状态(VCC =20V, VC = 30V, Isink = 50 mA) VOHVOL(VCC-2.0)--(VCC-1.1)1.5--2.0V故障输出饱和陷电压(Isink = 16 mA) VCE(sat) -- 225 500 mV 故障输出关闭状态漏电流(VCE = 20 V)IFLT(leak) -- 1.0 100 µA欠电压锁定驱动输出允许 (VCC 或VC 增加)滞后Vth(on)VH8.20.18.90.2100.3V电源电流管脚17 (VCC = VC = 20 V)管脚17 ( VCC = 20 V, VC = 30 V) 管脚18 ( VCC = VC = 20 V)管脚18 (VCC = 20 V, VC = 30 V) ICCIC--------12143.55.01620 06.010mA注: 1.输入共模电压或输入信号电压不能低于-0.3V。
基于51单片机的直流减速电机驱动电路的设计
基于51单片机的直流减速电机驱动电路的设计下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!基于51单片机的直流减速电机驱动电路的设计引言直流减速电机在各种应用中广泛使用,其驱动电路设计直接影响到电机的性能和稳定性。
《电动机控制电路》课件

它主要用于驱动各种机械设备, 满足生产和生活需求。
电动机控制电路的组成
01
02
03
主电路
主电路是电动机直接接入 的部分,主要由断路器、 接触器、电动机等组成。
控制电路
控制电路用于控制主电路 的工作,主要由控制按钮 、继电器、接触器等组成 。
保护电路
保护电路用于保护电动机 和控制电路的安全,主要 由热继电器、熔断器等组 成。
ห้องสมุดไป่ตู้
04
CATALOGUE
电动机控制电路的应用
电动机控制电路在工业自动化中的应用
自动化生产线
电动机控制电路用于驱动 各种机械装置,实现自动 化生产线的连续运转。
物流系统
在物流系统中,电动机控 制电路驱动传送带、升降 机等设备,实现货物的快 速、准确传输。
工业机器人
电动机控制电路用于驱动 工业机器人的关节,使其 能够实现复杂、精确的动 作。
方向,实现方向控制。
02
CATALOGUE
电动机控制电路的种类
交流电动机控制电路
交流电动机控制电路是指通过交流电源驱动交流电动机的电路。它通常由电源开 关、接触器、热继电器、熔断器等组成,用于控制电动机的正反转、调速和制动 等操作。
交流电动机控制电路的优点是结构简单、成本低廉、维护方便,适用于大多数工 业控制和自动化设备中。
电动机控制电路的发展趋势和挑战
发展趋势
未来电动机控制电路将趋向于高效、 环保、智能化发展,满足日益增长的 需求。
挑战
随着技术的不断发展,电动机控制电 路面临着成本、技术更新换代、市场 接受度等方面的挑战。同时,如何实 现电动机控制电路的可持续发展也是 当前面临的重要问题。
四种直流电机驱动电路图及设计思路讲解,有图有真相!
四种直流电机驱动电路图及设计思路讲解,有图有真相!下面为您详细介绍直流电机驱动设计需要注意的事项,低压驱动电路的简易栅极驱动、边沿延时驱动电路图解及其设计思路。
一、直流电机驱动电路的设计目标在直流电机驱动电路的设计中,主要考虑一下几点:1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。
如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。
2. 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。
1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。
要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。
3)对控制输入端的影响。
功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。
4)对电源的影响。
共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。
5)可靠性。
电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。
电机不同的部分有不同的设计要求。
1.输入与电平转换部分:输入信号线由DATA引入,1脚是地线,其余是信号线。
注意1脚对地连接了一个2K欧的电阻。
当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。
当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。
或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。
高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。
4种直流电机控制电路详解,含图
4种直流电机控制电路详解,含图含公式,直观又细致,不懂都难!旺材电机与电控2小时前私信“干货”二字,即可领取138G伺服与机器人专属及电控资料!直流电机在家用电器、电子仪器设备、电子玩具、录相机及各种自动控制中都有广泛的应用。
但对它的使用和控制,很多读者还不熟悉,而且其技术资料亦难于查找。
直流电机控制电路集锦,将使读者“得来全不费功夫”!在现代电子产品中,自动控制系统,电子仪器设备、家用电器、电子玩具等等方面,直流电机都得到了广泛的应用。
大家熟悉的录音机、电唱机、录相机、电子计算机等,都不能缺少直流电机。
所以直流电机的控制是一门很实用的技术。
本文将详细介绍各种直流电机的控制技术。
直流电机,大体上可分为四类:第一类为有几相绕组的步进电机。
这些步进电机,外加适当的序列脉冲,可使主轴转动一个精密的角度(通常在1.8°--7.5°之间)。
只要施加合适的脉冲序列,电机可以按照人们的预定的速度或方向进行连续的转动。
步进电机用微处理器或专用步进电机驱动集成电路,很容易实现控制。
例如常用的S A A l027或S A A l024专用步进电机控制电路。
步进电机广泛用于需要角度转动精确计量的地方。
例如:机器人手臂的运动,高级字轮的字符选择,计算机驱动器的磁头控制,打印机的字头控制等,都要用到步进电机。
第二类为永磁式换流器直流电机,它的设计很简单,但使用极为广泛。
当外加额定直流电压时,转速几乎相等。
这类电机用于录音机、录相机、唱机或激光唱机等固定转速的机器或设备中。
也用于变速范围很宽的驱动装置,例如:小型电钻、模型火车、电子玩具等。
在这些应用中,它借助于电子控制电路的作用,使电机功能大大加强。
第三类是所谓的伺服电机,伺服电机是自动装置中的执行元件,它的最大特点是可控。
在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小,除去控制信号电压后,伺服电机就立即停止转动。
伺服电机应用甚广,几乎所有的自动控制系统中都需要用到。
基于场效应管的直流电机驱动控制电路设计
基于场效应管的直流电机驱动控制电路设计一、本文概述随着现代电子技术的飞速发展,直流电机因其优良的控制性能和简单的结构设计,在工业自动化、精密仪器和消费电子等领域得到了广泛应用。
传统的直流电机驱动控制电路存在功耗大、效率低、响应速度慢等问题,难以满足当前对高性能电机控制系统的需求。
研究新型的直流电机驱动控制电路具有重要意义。
本文主要聚焦于基于场效应管的直流电机驱动控制电路设计。
场效应管(FET)作为一种高效、快速的电子器件,在电机驱动领域具有独特的优势。
本文将首先介绍场效应管的基本原理和特性,以及其在直流电机驱动控制中的应用优势。
接着,本文将详细阐述一种基于场效应管的直流电机驱动控制电路的设计方法,包括电路的拓扑结构、工作原理以及关键参数的设计与优化。
本文的研究重点在于如何通过优化电路设计,提高直流电机驱动控制系统的性能,包括降低功耗、提高效率、加快响应速度等。
本文还将探讨电路设计中可能遇到的问题和挑战,并提出相应的解决策略。
总体而言,本文旨在为直流电机驱动控制电路的设计提供一种新的思路和方法,以推动电机控制技术在现代工业和电子领域的应用与发展。
二、场效应管基础知识场效应管(FieldEffect Transistor,简称FET)是一种利用电场效应来控制电流流动的半导体器件。
它具有三个引脚:源极(Source)、栅极(Gate)和漏极(Drain)。
场效应管的主要类型包括结型场效应管(JFET)和金属氧化物半导体场效应管(MOSFET)。
在直流电机驱动控制电路中,MOSFET因其高输入阻抗、低导通电阻和高开关速度等特点而得到广泛应用。
场效应管的工作原理基于电场效应。
在MOSFET中,当在栅极和源极之间施加一个电压时,会在栅极和硅基片之间形成一个电场。
这个电场会影响硅基片中的电荷分布,从而控制源极和漏极之间的电流流动。
当栅极电压达到一定阈值时,MOSFET开始导通,电流可以在源极和漏极之间流动。
场效应管的特性参数对其在电路中的应用至关重要。
10W到500W-空心杯电机驱动电路-超稳定

10W到500W-空心杯电机驱动电路-超稳定空心杯电机灵敏、无齿槽效应、效率高达86%左右,特别是功率体积比非常高。
这点甚至超越永磁同步电机(伺服电机)。
目前价格正在快速下降。
数年内将替代很多铁芯电机。
这篇文章是我自己根据多个项目的工作经验写的,关于电机的驱动部分电路。
实际证明这电路适用范围广,高可靠性。
同行们应该很喜欢。
物有所值。
L301+24V4.7uH/13A31CODER_LD313__100CT12342CODER_L_ACODER_L_BC324101+5VE3011470uF/10VC325101CODER_L_BC_L_BCODER_L_A234567U3081A1Y2A2Y3A3YGND74HC14VCC6A6Y5A5Y4A4YR3222K/1WGND-P+24V-PC317102GND-P+5VC30714131211CODER_R_A1098C_R_ACODER_R_BC_R_B105E3112200uF/63VR3010RCODER_RM_L12L303M_L_R_VS47uH/6.8AC321C3204.7nF/630VM_L_L_VS4.7nF/630V1234CODER_R_ACODER_R_B470uF/10 VC327101M_R12L304M_R_R_VS47uH/6.8AC323C3224.7nF/630VM_R_L_ VS4.7nF/630VC326101+5VE302C_L_AU301M_L_PWM12345M_L_L_IN671A1B1Y2A2B2YGNDNAND74HC00VCC4B4A4Y3B3A3Y+5VC30214131211M_L_R_IN1098M_L_DIR105U302M_R_PWM12345M_R_L_IN671A1B1Y2A2B2YGNDNAND74HC00VCC4B4A4Y3B3A3Y+5VC30814131211M_R_R_IN1098M_R_DIR105U303M_R_R_IN12M_R_R_INM_R_L_IN345M_R_L_IN671A1B1Y2A 2B2YGNDNAND74HC00VCC4B4A4Y3B3A3Y+5VC3281413M_L_R_IN1051211M_L_R_IN10M_L_L_IN98M_L_L_INM_L_L_INR30210kU304123INSDVSSDTCOMLOVCCIRS__S2NCVBHOVSNCNCNC+15V+24V-P1U309IP+IP+__712VCCVIOUTFILTERGND8765R31010 5C31510K103M_L_IR31215KC318102+5VC309+24V-P_L2D3141.5KE33A3 R303+15V4GND-P10KE303514D3011312111049GND-P8+24V-P_LD3052C303M_L_L_HO1N4148105M_L_L_VSM_L_L_LO100UF/25V6E304+15V7C311100UF/25VM_L_R_INR3041 0k103123R305+15V4GND-P10KE3055Q302D307DG1R3151N4148S51M_L_R_VS__0Q304D308DG1SR3171 N414851__0M_L_R_HOU305INSDVSSDTCOMLOVCCIRS__SU306123INSDVSSDTCOMLO VCCIRS__SU307123INSDVSSDTCOMLOVCCIRS__SNCVBHOVSNCNC NC14D3041312111098C306M_R_R_HO1N4148105M_R_R_VS+15VM_R_ L_HONCVBHOVSNCNCNC14D30313+24V-P_R12111098GND-PC305M_R _L_HO1N4148105M_R_L_VSD3151.5KE33A+15VNCVBHOVSNCNCNC1 4D302131211109C304M_L_R_HO1N4148105M_L_R_VSM_L_L_LO+15V M_L_L_HOR3141N414851D306R3161N4148511G1GDS23Q301__0DS3Q303__023M_L_L_VSM_L_R_LOM_L_R_LO100UF/25V6E306+15V7C312100UF/25V103M_R_L_INR 30610kGND-P8+24V-P1234U310IP+IP+__712+24V-P_RVCCVIOUTFILTERGND87653+5VC310R311105C31610K103M_R_IR31315KC319102R307+15V4GND-P10KE3075M_R_L_LO100UF/25V6E308+15V7C313100UF/25VM_R_R_INR308 10k1032D309R3181N414851D310R3201N414851GG2Q306D311DR3191N4148S51M_R_R_VS_ _0Q308D312 DG1SR3211N414851__0G1M_R_R_HOD1S23Q305__0DM_R_L_LO1S3R309+15VQ307__04GND-P10KE309523M_R_L_VSM_R_R_LOM_R_R_L100UF/25VO6E310+15V7C314100UF/25V103GND-P3空心杯电机灵敏、无齿槽效应、效率高达86%左右,特别是功率体积比非常高。
减速器原理图

减速器原理图
减速器是一种用来减少机械设备运动速度并增加扭矩的装置。
它通常由齿轮传动系统组成,通过不同大小的齿轮组合来实现速度的减小和扭矩的增加。
下面我们将详细介绍减速器的原理图及其工作原理。
首先,我们来看一下减速器的结构。
减速器通常由输入轴、输出轴、齿轮组、外壳等部分组成。
输入轴连接到驱动装置,输出轴连接到被驱动装置,齿轮组则是实现速度减小和扭矩增加的关键部件。
外壳则起到保护和支撑齿轮组的作用。
接下来,我们来看一下减速器的工作原理。
当输入轴带动第一个齿轮转动时,它会通过啮合传动的方式带动第二个齿轮转动,第二个齿轮的大小通常比第一个齿轮大,因此它的转速会减小,但扭矩会增加。
同理,第二个齿轮再带动第三个齿轮转动,以此类推,最终输出轴的转速会比输入轴的转速小,但扭矩会比输入轴大。
减速器的原理图如下所示:
(在此插入减速器原理图)。
从原理图中可以看出,输入轴和输出轴之间通过齿轮组连接,而齿轮组的大小决定了最终的速度和扭矩。
减速器的工作原理就是通过这种齿轮传动的方式来实现速度和扭矩的转换。
除了常见的齿轮传动方式,减速器还可以采用带传动、链传动等方式来实现速度和扭矩的转换。
不同的传动方式在原理上略有差异,但都是通过改变传动比来实现速度和扭矩的转换。
总的来说,减速器是一种常见的机械传动装置,通过齿轮组等传动方式来实现速度和扭矩的转换。
它在各种机械设备中都有广泛的应用,如汽车、风力发电机、工业机械等领域。
希望通过本文的介绍,您对减速器的原理图和工作原理有了更深入的了解。
常用电机驱动电路及原理
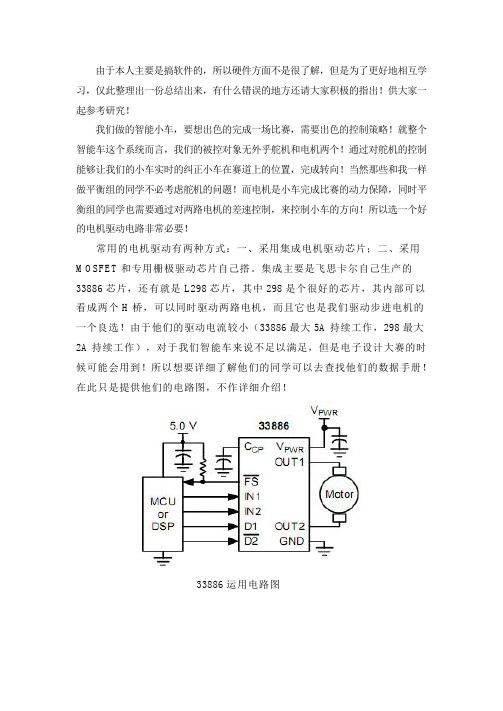
EN1 和 EN2 一般使用时我们直接接高电平,使整个电路始终处于工作状态!
通过对上面电路的了解,大家应该大致了解了 H 桥的基本工作原理,有没有更 好地驱动电路了呢?答案是肯定的!以下是直流电动机的机械特性表达式:
n 是电机的转速,U N 是电机的两端的电压,Ce 、CT 、φN 对于我们来说可以看成一 个定值,Tem 是负载转矩,车做好之后该值基本确定不变,剩下一个重要的参数 Ra 电 机电枢回路的阻值,电机本身的内阻很小,如果外部引入的电阻过大,此时直流电 动机转速降落较大,驱动电路效率较低,电机性能不能充分发挥。为了提高 电机的转速我们应该尽量减小电机电枢回路绕组的阻值,我们知道:N 沟道的 MOS FET 具有极低的导通电阻,IRF3205 导通电阻在 8mΏ左右,而 IRF4905 几乎是其两 倍,那么是不是可以考虑全部使用 N 沟道的 3205 来搭我们的驱动电路呢,答案也 是肯定的,只不过需要换一片栅极驱动芯片就行!
常用的电机驱动有两种方式:一、采用集成电机驱动芯片;二、采用 MOSFET 和专用栅极驱动芯片自己搭。集成主要是飞思卡尔自己生产的 33886 芯片,还有就是 L298 芯片,其中 298 是个很好的芯片,其内部可以 看成两个 H 桥,可以同时驱动两路电机,而且它也是我们驱动步进电机的 一个良选!由于他们的驱动电流较小(33886 最大 5A 持续工作,298 最大 2A 持续工作),对于我们智能车来说不足以满足,但是电子设计大赛的时 候可能会用到!所以想要详细了解他们的同学可以去查找他们的数据手册! 在此只是提供他们的电路图,不作详细介绍!
最全直流电机工作原理与控制电路解析(无刷+有刷+伺服+步进)

最全直流电机工作原理与控制电路解析(无刷+有刷+伺服+步进)直流电动机是连续的执行器,可将电能转换为(机械)能。
直流电动机通过产生连续的角旋转来实现此目的,该角旋转可用于旋转泵,风扇,压缩机,车轮等。
与传统的旋转直流电动机一样,也可以使用线性电动机,它们能够产生连续的衬套运动。
基本上有三种类型的常规电动机可用:AC 型电动机,(DC)型电动机和步进电动机。
典型的小型直流电动机交流电动机通常用于高功率的单相或多相(工业)应用中,需要恒定的旋转扭矩和速度来控制大负载,例如风扇或泵。
在本(教程)中,我们仅介绍简单的轻型直流电动机和步进电动机,这些电动机用于许多不同类型的(电子),位置控制,微处理器,(PI)C和(机器人)类型的电路中。
基本直流电动机该直流电动机或直流电动机,以给它的完整的标题,是用于产生连续运动和旋转,其速度可以容易地控制,从而使它们适合于应用中使用是速度控制,伺服控制类型的最常用的致动器,和/或需要定位。
直流电动机由两部分组成,“定子”是固定部分,而“转子”是旋转部分。
结果是基本上可以使用三种类型的直流电动机。
有刷(电机)–这种类型的电机通过使(电流)流经换向器和碳刷组件而在绕线转子(旋转的零件)中产生磁场,因此称为“有刷”。
定子(静止部分)的磁场是通过使用绕制的定子励磁绕组或永磁体产生的。
通常,有刷直流电动机便宜,体积小且易于控制。
无刷电动机–这种电动机通过使用附着在其上的永磁体在转子中产生磁场,并通过电子方式实现换向。
它们通常比常规的有刷型直流电动机更小,但价格更高,因为它们在定子中使用“霍尔效应”开关来产生所需的定子磁场旋转顺序,但是它们具有更好的转矩/速度特性,效率更高且使用寿命更长比同等拉丝类型。
伺服电动机–这种电动机基本上是一种有刷直流电动机,带有某种形式的位置反馈控制连接到转子轴。
它们连接到PWM型控制器并由其控制,主要用于位置(控制系统)和无线电控制模型。
普通的直流电动机具有几乎线性的特性,其旋转速度取决于所施加的直流电压,输出转矩则取决于流经电动机绕组的电流。
智能小车电机驱动原理

第一节智能小车电机驱动原理一、驱动板概述驱动板由大功率驱动芯片L298为主,加上L1117稳压芯片为整个电路板提供稳定的5V电压;驱动板能同时驱动两个直流电机;通过对六个口的控制就可以分别实现对电机正反转、加减速的控制;完成向前、向后、左转和右转等各种组合运动;每个电机用三个口控制,一个使能端EN或PWM输入端,控制电机的转动与停止,也能用于PWM控制调速;也就说,对这个输入端输入一定频率的脉冲,当为高电平时,电机转动,为低电平时,电机停止转动;一定频率的脉冲,电机一段时间内转动一段时间内停止转动,但由于直流电机的惯性特性,它不会立即停下来,只要频率高于某个值,就不会感觉到电机的停滞现象,反而是一种很连续的运动;只要改变一个周期内高低电平的时间比例,就可以改变电机的速度;另外两个输入端是为了控制方向,分别为In1和In2;In1为高电平,In2为低电平,电机按一个方向转,In1为低电平,In2为高电平,电机向相反方向转,如果他们同时为高电平或低电平,那么电机不转;二、驱动板电路原理那我们首先分析一下L298驱动板,L298驱动板原理图如图1;该驱动板需要用7.2V电源供电,但L298N的逻辑参考电平为典型的TTL电平;用了一个L1117稳压芯片提供稳定的5V输出电压和逻辑参考电压,D9、D10、D11和D12是发光二极管,指示运动方向,与它们连接的电阻都是限流电阻;R5和R8都是下拉电阻,让EnA和EnB口要么是高电平,要么是低电平,避免出现电平混乱,提高对输入信号的抗干扰能力;输出端都接有0.1uF电容,加上二极管平衡电路;他们都是为了保护L298N,电机是感性负载,当给电机突然通电与断电,因为电流的瞬变,电机两端会产生瞬时高压和大电流;如果没有保护措施,L298N就可能会被烧毁;三、恒压恒流桥式2A驱动芯片L298NL298N驱动芯片是由SGS公司的产品,比较常见的15脚Multiwatt封装,内部有4通道逻辑驱动电路;它的内部结构如图1;从内部结构图可知,用三极管组成H型平衡桥,驱动功率大,驱动能力强;同时H型PWM电路工作在晶体管的饱和状态与截止状态,具有非常高的效率;从图2看出该驱动芯片有两路H型PWM电路,上面已谈到用PWM控制直流电机调速的基本原理,现在来看电路的具体实现;In1为高电平,In2为低电平,EnA为高电平时,U1、U4输出为高电平,U2、U3输出为低电平;在OUT1、OUT2接上电机后,T1、T4管导通,T2、T3管截止,电机向一个方向转;In1为低电平,In2为高电平,EnA仍旧为高电平,T1、T4管截止,T2、T3管导通,电机向相反方向转;In1、In2同时为高电平或低电平,T1与T3同时导通或截止,T2与T4也是同时导通与截止,但与前者相反,也就是OUT1与OUT2电压相同;电机会快速停转;如果EnA端为低电平,整个H型PWM电路关闭;电机当然也就不会转;四、驱动板连线:驱动板与单片机和驱动板与直流电机的接线如图3,整个系统的总电源由L298驱动板的供电电源提供;L298驱动板的5V电源输出给单片机;L298驱动板的输入控制端与P0口相连,具体各管脚的连接的情况如图3;L298驱动板的输出直接与直流电机连接,参照图3;L298驱动板的有一个VCC和GND不用;他们是使用步进电机时,作为公共端的;要实现对电机的前后控制,只要P0^0和P0^1逻辑电平相反;假设P0^0为高,P0^1为低时是正转;那么在颠倒送数,即P0^0为低,P0^1为高,车轮就会反转;调速,控制P0^2口的高电平保持时间相对总周期长点,速度就大,短点,速度就小;图3驱动板连线图。
51单片机智能小车全速前进程序源代码、电路原理图和器件表
51单片机智能小车全速前进程序源代码、电路原理图、电路器件表智能小车电路板分为核心板和驱动板。
核心板上的处理器的芯片型号是:STC15W4K56S4,这是一款51单片机。
驱动板上有电源电路、电机驱动电路以及一些功能模块接口。
智能小车全速前进只要控制智能小车的四个轮子以全速向前转动就可以了。
智能小车的四个轮子由四个直流减速电机驱动。
直流减速电机驱动芯片采用L293D,一片电机驱动芯片L293D可以驱动两个直流减速电机,智能小车用到4个直流减速电机,需要用到两片L293D 电机驱动芯片。
在本文主要提供了智能小车全速前进的完整的程序原代码、电路原理图以及电路器件表。
下面是智能小车前进实验的程序流程图:智能小车核心板原理图STC15W4K56S4智能小车核心板器件(BOM)表实物图060306030603PIN插针PIN2x1406030603直插LQFP7x7-48 STC15W4K56S4智能小车核心板正面STC15W4K56S4智能小车核心板背面智能小车驱动板原理图51单片机(STC15W4K56S4)智能小车驱动板器件(BOM)表实物图直插直插直插直插直插直插直插直插直插直插PIN与PIN之间的间隔2.54mm插电池盒PIN与PIN间隔2.54mm,插电机3PIN插针,针与针间隔2.54mm插舵机红色插针和黑色插针3.3V红色插针、GND黑色插针PIN红色插针和黑色插针5V PIN红色插针和黑色插针VINPIN与PIN之间的间隔2.54mm 插MQ2模块针与针间隔2.54mm插GP2Y1014AU模块针与针间隔2.54mm语音播报实验时,串口4插语音播报模块针与针间隔2.54mmIO扩展用,没有必要不要焊接针与针间隔2.54mm插DHT11模块用4PIN插针,针与针间隔2.54mm用杜邦线连接超声波模块针与针间隔2.54mm插蓝牙模块(要原厂原装的)用8PIN插针,针与针间隔2.54mm杜邦线连接红外循迹避障模块用4PIN插针,针与针间隔2.54mm用杜邦线连接测速模块针与针间隔2.54mm插5V的LCD1602液晶MPU6050不要焊接。
l298n

l298nL298N是专用驱动集成电路,属于H桥集成电路,与L293D的差别是其输出电流增大,功率增强。
其输出电流为2A,最高电流4A,最高工作电压50V,可以驱动感性负载,如大功率直流电机,步进电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。
当驱动直流电机时,可以直接控制步进电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。
L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7V电压。
4脚VS接电源电压,VS电压范围VIH为+2.5~46V。
输出电流可达2A,可驱动电感性负载。
1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。
L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。
5,7,10,12脚接输入控制电平,控制电机的正反转。
EnA,EnB接控制使能端,控制电机的停转。
下图是L298N 内部原理图。
二、L298N中文资料汇总—L298N引脚图及功能LN298引脚图L298N逻辑功能表In3,In4的逻辑图与表1相同。
由表1可知EnA为低电平时,输入电平对电机控制起作用,当EnA为高电平,输入电平为一高一低,电机正或反转。
同为低电平电机停止,同为高电平电机刹停。
三、L298N中文资料汇总—L298N工作原理L298N控制器原理如下:图3是控制器的示意图,它由三个虚线框图组成。
(1)虚线框图1控制电机正反转,U1A,U2A是比较器,VI来自炉体压强传感器的电压。
当VI>VRBF1时,U1A输出高电平,U2A输出高电平经反相器变为低电平,电机正转。
同理VI<VRBF1时,电机反转。
电机驱动电路原理
电机驱动电路原理
电机驱动电路原理是一种用于控制电机运转的电路设计。
这种电路通常由一个电机驱动器和一个控制器组成。
电机驱动器是用来提供电力和控制信号的设备。
它接收来自控制器的信号,并将电流传送给电机,以控制电机的运转。
电机驱动器通常包括一个功率开关,用来控制电机的通断,并根据控制器的指令进行调节。
控制器是用来指挥电机驱动器的设备。
它接收来自用户或其他信号源的输入,然后根据输入生成控制信号,再将控制信号传送给电机驱动器。
控制器可以是一个简单的电路,也可以是一个复杂的微处理器系统,取决于具体的应用场景和要求。
在电机驱动电路中,通常会使用一些电子元件来实现各种功能。
例如,电机驱动器中会使用功率开关来控制电流的通断。
常见的功率开关包括晶体管、场效应管和继电器等。
另外,还会使用传感器来感知电机的状态,例如速度传感器和位置传感器等。
电机驱动电路采用的控制方式多种多样,根据不同的需求和应用场景选择合适的控制算法。
常见的控制算法包括开环控制和闭环控制。
开环控制是一种简单的控制方式,通常只需根据预定的输入信号来控制电机的运转。
闭环控制则需要反馈电机的实际状态,并根据反馈信息来调整控制信号,使电机达到预定的运转状态。
总之,电机驱动电路是一种用于控制电机运转的关键电路。
它
通过控制器生成控制信号,并通过电机驱动器将信号传送给电机,以实现电机的运转。
不同的应用场景和需求会有不同的电机驱动电路设计,但基本原理和组成部件大致相同。
常用电机驱动电路及原理

常用电机驱动电路及原理1.直流电机驱动电路:直流电机驱动电路主要用于控制直流电机的转速和方向。
常用的直流电机驱动电路有H桥驱动电路、PWM调速电路和电流反馈调速电路。
-H桥驱动电路:H桥驱动电路是最常用的直流电机驱动电路之一,可以实现正、反转和制动功能。
它由四个开关管组成,分为上电路和下电路。
通过控制上下电路中的开关管的导通和断开,可以改变电机的运行方向和转速。
-PWM调速电路:PWM调速电路通过调整占空比来控制电机的转速。
PWM调速电路将直流电源与电机连接,通过调节PWM信号的占空比,控制电机的平均输出电压,从而改变电机的转速。
-电流反馈调速电路:电流反馈调速电路是一种闭环控制系统,通过反馈电流信号来控制电机的转速。
它使用电流传感器测量电机的输出电流,并将反馈信号与设定值进行比较,通过PID控制算法来调节PWM信号,控制电机的转速。
2.交流电机驱动电路:交流电机驱动电路主要用于控制交流电机的转向和转速。
常用的交流电机驱动电路有逆变器驱动电路和矢量控制电路。
-逆变器驱动电路:逆变器是将直流电源转换成交流电源的装置。
在交流电机驱动中,逆变器将直流电源的电压和频率转换成交流电压和频率,通过改变输出电压的幅值和频率,控制交流电机的转速。
-矢量控制电路:矢量控制电路是一种先进的交流电机驱动技术,通过对电机的磁场进行独立控制来实现高精度的转速和转向控制。
矢量控制电路使用电流传感器测量电机的输出电流,并通过矢量控制算法,控制电机的磁场和转速。
总结:直流电机驱动电路主要包括H桥驱动电路、PWM调速电路和电流反馈调速电路,用于控制直流电机的转速和方向。
交流电机驱动电路主要包括逆变器驱动电路和矢量控制电路,用于控制交流电机的转向和转速。
这些电机驱动电路在工业自动化、电动车和家用电器等领域广泛应用,具有重要的意义和价值。
51单片机智能小车PWM调速前进程序源代码、电路原理图和器件表
51单片机智能小车PWM调速前进程序源代码、电路原理图、电路器件表从控制电路角度划分,智能小车电路板分为核心板和驱动板。
核心板上的处理器的芯片型号是:STC15W4K56S4,这是一款51单片机。
驱动板上有电源电路、电机驱动电路以及一些功能模块接口。
智能小车前进只要控制智能小车四个轮子向前转动就可以了。
智能小车四个轮子由四个直流减速电机驱动。
直流减速电机驱动芯片采用L293D,一片电机驱动芯片L293D可以驱动两个直流减速电机,智能小车用到4个直流减速电机,需要用到两片L293D电机驱动芯片。
但有时候我们需要控制智能小车的速度,不希望智能小车全速前进。
比如在“智能小车循迹实验”中,如果智能小车速度过快,来不及反应做出方向的调整,智能小车会很容易跑离轨迹,这样就需要调整控制智能小车的速度了。
那么怎么样实现智能小车前进速度的调节呢?调节智能小车的速度,实际上是调节电机的运转速度,PWM调速是目前电机的主流调速方式。
智能小车采用脉宽调制(PWM)的办法来控制电机的转速,从而控制智能小车的速度。
在此种情况下,电池电源并非连续地向直流电机供电,而是在一个特定的频率下为直流电机提供电能。
不同占空比的方波信号,调节对直流电机的通断电,能起到对直流电机调速作用。
这是因为电机实际上是一个大电感,它有阻碍输入电流和电压突变的能力,因此脉冲输入信号被平均分配到作用时间上。
这样,改变L293D使能端EN1和EN2上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了直流电机转速。
智能小车PWM调速前进程序如下:首先,定义了2个变量,这2个变量用于设置智能小车的速度。
unsigned char pwmval_left_init=6; //调节此值可以调节小车的速度。
unsigned char pwmval_right_init=6; //调节此值可以调节小车的速度。
通过以下函数初始化定时器0,每1毫秒中断一次。
void Timer0_Init(void) //定时器0初始化{TMOD=0x01;TH0=0xf8;TL0=0xcd;TR0=1;ET0=1;EA=1;}下面我们看定时器0的中断处理函数。
自己做的四相八拍步进电机调速

1 引言在工业控制系统里步进电动机是主要的控制元件之一。
步进电机具有快速启动停止,精确定位和能够使用数字信号进行控制,能够实现脉冲-角度转换的特点,因此得到广泛的应用。
在使用步进电机的控制系统里,脉冲分配器产生周期的控制脉冲序列,步进电机驱动器每接收一个脉冲就控制步进电机沿给定方向步进一步。
本实验旨在通过控制AT89S52芯片,实现对四相步进电机的转动控制。
具体功能主要是控制电机正转、反转、加速与减速。
具体工作过程是:给试验箱上电后,拨动启动开关,步进电机按照预先设置的转速和转动方式转动。
调整正反转按钮,步进电机实现正反转切换;拨动加速开关,步进电机转速加快,速度达到最大值,不再加速;拨动减速开关时,电机减速转动,速度减到最小速度,停止减速。
2 四相步进机2.I 步进电机步进电机是一种将电脉冲转化为角位移的执行机构。
电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
2.2 步进电机的控制1.换相顺序控制:通电换相这一过程称为脉冲分配。
例如:混合式步进电机的工作方式,其各相通电顺序为A-B-C-D,通电控制脉冲必须严格按照这一顺序分别控制A,B,C,D相的通断。
2.控制步进电机的转向控制:如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
3.控制步进电机的速度控制:如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
2.3 步进电机的工作过程图2.1步进电机设计图开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
10W到500W-空心杯电机驱动电路-超稳定

控制的空心杯用过 MAXON 的 RE-40 电机,24V/150W。上海埃依琪的 24V/150W 电机,24V/250W 电机。在最高速正反转切换,电机输出轴抱住,让电机堵死,都没有问题。
这个电路使用 24V 的电机,更高电压电机只要调整些外围元件的耐压值即可,毕竟 IRS21844 之类的芯片是为 600V 高压而设计的。IRS21844 是 IR 公司的新一代电机驱动芯片, 瞬态过负冲耐电压达到 50V,不是 IR2104、IRS2104 的耐 5V 可比的。可靠性大大提高,此外 IRS21844 的电机动力地与控制信号地是分开的,画 PCB 时根据电路具体情况可自由划分地 线,一般都是单点接地的,接地点位置考虑两个地的瞬间电压不相等情况。两个地分开,可 以在瞬间大电流时,避免电机动力地对信号地的大电流涌入涌出,导致的改变信号地的电平, 产生逻辑混乱。
这个电路控制了 2 个电机,两个电机的控制电路是一样的。由于 L303、L304 的电感叠加 到了空心杯电机上,我选用了 64KHz 的 PWM 频率,这样控制器的 CPU 负荷很小,当然,串了 电感,使空心杯的瞬态响应速度下降了,相当于降级使用了,但仍然比其他类型的电机灵敏 得多。
此 PWM 值由诸多因素影响: 例如电机的电感,电感越大,相当于电机惯性越大,反应越慢,PWM 应该越低。 例如电机的负载,负载越大,相当于电机惯性越大,PWM 应该越低。 减速器的减速比越大,相当于电机惯性越大,PWM 应该越低。 C321、C320 等这 4 个电容是 CBB 电容,耐压值 250V 或以上。是蓝色或褐色的、外形像 小面团。CBB 耐瞬间高压、可自愈。L303、L304 是伍尔特电感,黑色的方块块,封闭式的, 相对外露的绕线式电感,他的体积是其他的三分之一左右。伍尔特大电感里面绕的不是铜丝, 是扁铜片。砸碎看过,德国的东西,做的精益求精。十多元钱 1 颗。 1.5KE33A 是瞬态抑制二极管、可以少用到 1 颗或 2 颗,但是不能省略。 E331 是电解铝电容,2200UF/63V。电机反转切换瞬间,由于电机线圈电感左右,电机 变为发电机,产生电压等于输入电压 24V,叠加在电源的 24V 电压上,共 48V 左右。所以这 颗电容耐压要高于 48V。鉴于电容耐电压越高,可靠性约好,但越高,体积又约大,选为 63V。
车用驱动电机原理与控制基础(第2版)课件:车用电驱动系统的集成
inv
inv =
B
m
m =
inv
m
ed =
= inv m
B
由于电驱动系统输入为直流,所以输入功率计
算比较直接,就是电压与电流的乘积。
B = B B
电驱动系统的输出为驱动电机的转速和转矩,
也可以直接通过转矩和转速乘积计算得到。
m m
m =
9.550
得到转折速度表达式为:
s max
rt =
绪
论
f + d d
图8-6 弱磁控制与定子电流最优控制
2
+ q q
2
式中, s max 为定子电压矢量的最大值,在等幅值变换条件下,其最
大值为2B /3。
即逆变器输出电压越高,理论上电机外特性图上恒转矩区对应的转速
越高。考虑到损耗等因素,电源电压的波动也会反映在电驱动系统的
6
车用电驱动系统的功率和效率特性
§ 9.1 车用电驱动系统的负载平衡
一
绪
论
图 8-4 驱动系统能量流
在汽车行驶时,能量由车载能源(直流电源)供给,通过电机控制器中逆变为三相(或者多相)交流电,从而驱动
电机输出转矩驱动车辆行驶;制动情况,在车辆自身的惯性或者坡道势能的驱动下、驱动电机将转换工作模式,由
工作,如图8-1所示。
一
绪
论
图 8-1 驱动电机的一般机械特性举例
电机最高工作转速max 与额定转速N 的比值称为电机的“恒功率调
速比”,简称“调速比”
max
=
N
每种型式的电机有其固有的调速比限值范围。例如,由于有永磁体,
磁场难以衰减,因此永磁电机具有相对较小的调速比(约为3);
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一个电动小车整体的运行性能,首先取决于它的电池系统和电机驱动系统。
电动小车的驱动系统一般由控制器、功率变换器及电动机三个主要部分组成。
电动小车的驱动不但要求电机驱动系统具有高转矩重量比、宽调速范围、高可靠性,而且电机的转矩-转速特性受电源功率的影响,这就要求驱动具有尽可能宽的高效率区。
我们所使用的电机一般为直流电机,主要用到永磁直流电机、伺服电机及步进电机三种。
直流电机的控制很简单,性能出众,直流电源也容易实现。
本文即主要介绍这种直流电机的驱动及控制。
1.H 型桥式驱动电路
直流电机驱动电路使用最广泛的就是H型全桥式电路,这种驱动电路可以很方便实现直流电机的四象限运行,分别对应正转、正转制动、反转、反转制动。
它的基本原理图如图1所示。
全桥式驱动电路的4只开关管都工作在斩波状态,S1、S2为一组,S3、
S4 为另一组,两组的状态互补,一组导通则另一组必须关断。
当S1、S2导通时,S3、S4关断,电机两端加正向电压,可以实现电机的正转或反转制动;当S3、S4导通时,S1、S2关断,电机两端为反向电压,电机反转或正转制动。
在小车动作的过程中,我们要不断地使电机在四个象限之间切换,即在正转和反转之间切换,也就是在S1、S2导通且S3、S4关断,到S1、S2关断且S3、S4导通,这两种状态之间转换。
在这种情况下,理论上要求两组控制信号完全互补,但是,由于实际的开关器件都存在开通和关断时间,绝对的互补控制逻辑必然导致上下桥臂直通短路,比如在上桥臂关断的过程中,下桥臂导通了。
这个过程可用图2说明。
因此,为了避免直通短路且保证各个开关管动作之间的协同性和同步性,两组控制信号在理论上要求互为倒相的逻辑关系,而实际上却必须相差一个足够的死区时间,这个矫正过程既可以通过硬件实现,即在上下桥臂的两组控制信号之间增加延时,也可以通过软件实现(具体方法参看后文)。
驱动电流不仅可以通过主开关管流通,而且还可以通过续流二极管流通。
当电机处于制动状态时,电机便工作在发电状态,转子电流必须通过续流二极管流通,否则电机就会发热,严重时烧毁。
开关管的选择对驱动电路的影响很大,开关管的选择宜遵循以下原则:
(1)由于驱动电路是功率输出,要求开关管输出功率较大;
(2)开关管的开通和关断时间应尽可能小;
(3)小车使用的电源电压不高,因此开关管的饱和压降应该尽量低。
在实际制作中,我们选用大功率达林顿管TIP122或场效应管IRF530,效果都还不错,为了使电路简化,建议使用集成有桥式电路的电机专用驱动芯片,如L298、LMD18200,性能比较稳定可靠。
由于电机在正常工作时对电源的干扰很大,如果只用一组电源时会影响单片机的正常工作,所以我们选用双电源供电。
一组5V给单片机和控制电路供电,另外一组9V给电机供电。
在控制部分和电机驱动部分之间用光耦隔开,以免影响控制部分电源的品质,并在达林顿管的基极加三极管驱动,可以给达林顿管提供足够大的基极电流。
图3所示为采用TIP122的驱动电机电路,IOB8口为“0”,IOB9口输入PWM波时,电机正转,通过改变PWM的占空比可以调节电机的速度。
而当IOB9口为“0”,IOB8口输入PWM 波时,电机反转,同样通过改变PWM的占空比来调节电机的速度。
图4为采用内部集成有两个桥式电路的专用芯片L298所组成的电机驱动电路。
驱动芯片L298是驱动二相和四相步进电机的专用芯片,我们利用它内部的桥式电路来驱动直流电机,这种方法有一系列的优点。
每一组PWM波用来控制一个电机的速度,而另外两个I/O口可以控制电机的正反转,控制比较简单,电路也很简单,一个芯片内包含有8个功率管,这样简化了电路的复杂性,如图所示IOB10、IOB11控制第一个电机的方向,IOB8输入的PWM控制第一个电机的速度;IOB12、IOB13控制第二个电机的方向,IOB9输入的PWM控制第二个电机的速度。
LMD18200是美国国家半导体公司推出的专用于直流电动机驱动的H桥组件,同一芯片上集成有CMOS控制电路和DMOS功率器件。
此种芯片瞬间驱动电流可达6A,正常工作电流可达3A,具有很强的驱动能力,无“shot-through”电流,而且此种芯片内部还具有过流保护的测量电路,只需要在LMD18200的8脚输出端测出电压和给定的电压比较即可保护电路过流,从而实现电路的过流保护功能。
由LMD18200组成的电机驱动电路如图5所示。
LMD18200的5脚为PWM 波输入端,通过改变PWM的占空比就可调节电机的速度,改变3脚的高低电平即可控制电机的正反转。
此电路和以上几种驱动电路比较具有明显的优点,驱动功率大,稳定性好,实现方便,安全可靠。
2 .P W M 控制
PWM(脉冲宽度调制)控制,通常配合桥式驱动电路实现直流电机调速,非常简单,且调速范围大,它的原理就是直流斩波原理。
如图1所示,若S3、S4 关断,S1、S2受PWM控制,假设高电平导通,忽略开关管损耗,则在一个周期内的导通时间为t,周期为T,波形如图6,则电机两端的平均电压为:U=Vcc t/ T=αVcc ,其中,α=t/T称为占空比,Vcc为电源电压(电源电压减去两个开关管的饱和压降)。
电机的转速与电机两端的电压成比例,而电机两端的电压与控制波形的占空比成正比,因此电机的速度与占空比成比例,占空比越大,电机转得越快,当占空比α=1时,电机转速最大。
PWM控制波形的实现可以通过模拟电路或数字电路实现,例如用555搭成的触发电路,但是,这种电路的占空比不能自动调节,不能用于自动控制小车的调速。
而目前使用的大多数单片机都可以直接输出这种PWM波形,或通过时序模拟输出,最适合小车的调速。
我们使用的是凌阳公司的SPCE061单片机,它是16位单片机,频率最高达到49MHz,可提供2路PWM 直接输出,频率可调,占空比16级可调,控制电机的调速范围大,使用方便。
SPCE061单片机有32个I/O口,内部设有2个独立的计数器,完全可以模拟任意频率、占空比随意调节的PWM信号输出,用以控制电机调速。
在实际制作过程中,我们认为控制信号的频率不需要太高,一般在400Hz以下为宜,占空比16级调节也完全可以满足调速要求,并且在小车行进的过程中,占空比不应该太高,在直线前进和转弯的时候应该区别对待。
若车速太快,则在转弯的时候,方向不易控制;而车速太慢,则很浪费时间。
这时图6可以根据具体情况慢慢调节。
在2003年“简易智能电动车”的实际制作中,我们的小车驱动信号的占空比一般在8/16以下。
3.通过软件避免直通短路
从前面的分析可知,桥式驱动电路中,由于开关管有开通和关断时间,因此存在上下桥臂直通短路的问题。
直通短路的存在,容易使开关管发热,严重时烧毁开关管,同时也增加了开关管的能量损耗,浪费了小车宝贵的能量。
由于现在的许多集成驱动芯片内部已经内置了死区保护(如LMD18200),这里主要介绍的是利用开关管等分立元件以及没有死区保护的集成芯片制作驱动电路时增加死区的方法。
死区时间的问题,只有在正转变为反转的时候才存在,而在正转启动或反转启动的时候并没有,因此不需要修正。
如果开关管的开通和关断时间非常小,或者在硬件电路中增加延时环节,都可以降低开关管的损耗和发热。
当然,通过软件避免直通短路是最好的办法,它的操作简单,控制灵活。
通过软件实现死区时间,就是在突然换向的时候,插入一个延时的环节,待开关管关断之后,再开通应该开通的开关管。
图7为利用软件修正死区时间的流程图,在开关管每次换向的时候,不立即进行方向的切换,而是先使开关管关断一段时间,使其完全关断后再换向打开另外的开关管。
这个关断时间由单片机软件延时实现。
4.总结
以上主要分析了电机的全桥式驱动电路,这是直流电机调速使用最多的调速方法。
目前市场上有很多种电机驱动的集成电路,效率高,电路简单,使用也比较广泛,但是其驱动方法大多。