电传动控制基础第七章 8K机车电子控制系统
8k电力机车使用说明书
8k电力机车使用说明书8K电力机车使用说明书一、引言8K电力机车是一种高性能的电力机车,本说明书旨在向用户提供详细的使用指南,以确保用户正确、安全地操作机车。
二、机车概述1. 机车外观:8K电力机车外观整洁、美观,采用高强度材料制造,具有良好的耐久性和抗腐蚀性。
2. 机车性能:8K电力机车采用先进的电力传动技术,具有出色的加速性能和牵引力,适用于各种运输任务。
3. 安全系统:机车配备了完善的安全系统,包括制动系统、防滑系统和防撞系统,以确保行车安全。
三、机车操作1. 启动与停止:按下启动按钮,机车将开始运行;按下停止按钮,机车将停止运行。
在启动和停止过程中,应注意平稳操作,避免急刹车或急加速。
2. 加速与减速:通过控制手柄来调节机车的速度。
向前推动手柄可加速,向后拉动手柄可减速。
在加速和减速过程中,应注意平稳过渡,避免突然变速。
3. 转向操作:通过转向盘来控制机车的转向。
向左转动转向盘可使机车向左转弯,向右转动转向盘可使机车向右转弯。
在转向过程中,应注意转向角度和速度,避免过度转向或转向不及时。
4. 灯光控制:机车配备前照灯、尾灯和转向灯。
通过控制开关来控制灯光的开关和闪烁。
四、维护与保养1. 清洁:定期清洁机车外观,保持机车整洁干净。
2. 润滑:定期给机车的关键部位进行润滑,以确保机车的正常运行。
3. 检查:定期检查机车的各项功能和部件,如制动系统、电池、电机等,确保其正常工作。
4. 维修:如发现机车有故障或异常情况,应及时联系专业维修人员进行维修。
五、安全注意事项1. 操作前请仔细阅读本说明书,并按照说明书的要求正确操作机车。
2. 在操作机车时,请注意周围环境,避免与其他车辆或行人发生碰撞。
3. 在停车时,请将机车停在平坦、稳固的地面上,并拉起手刹。
4. 在行车过程中,请保持适当的车距,遵守交通规则,确保行车安全。
5. 在维护和保养机车时,请切断电源,并采取相应的安全措施,避免触电或其他意外事故。
电传动控制基础第七章 8K机车电子控制系统

2. 当IS1突降后,A5输出正饱和 V462 V461导通 V460 V463截止 +15V R177 R182 C 输出电压IS2直线下降 时间常数为 = R•C = ( R182 + R177 ) • C74 = 2.8(S)
UN
三、晶闸管触发系统
UN 全波 整流
Uo
t t t t t t t t t
6
4 2 2 4 6 8 v IA2 R159
V457
– A2 +
V458
10K
2.
制动特性曲 线形成电路
-15V -V I0
R212 R216 R217
R220
V472
假设A处断开: A3: IA3 = K3v – K4I0 + C1 A4: IA4 = C2 V584 、 V591 最大值选择器
T4
T2
D2
T5
RM3
D3
Ud2
移相 检测
电机端压 开关 检测 控制电压
T6
D4
§7.2 8K型电力机车控制系统
8K机车控制系统:双闭环控制系统 内环是电流环——恒流无静差调速系统 外环是速度环——准恒速控制系统
控制流程:司机手柄指令器 特性控制器 牵引制动转换开关 给定积分器 调制器 传输总线 解调器 最大值限制器 防空转滑行装置 PI调节器 移相触发系统 整流电路
– LM139 + –15V
10K
D:d形成电路
100K U UF 100K 100K +15V LM124 UE
+5V d
– +
LM139
–
+
机电传动控制课件ppt精选全文

第一节 机电传动控制系统得组成与分类
一、自动控制系统分类: (4)按系统稳态时被调量与给定量有无差别,可分为
有静差调节系统与无静差调节系统。
(5)按给定量变化得规律,可分为 定值调节系统、程序控制系统与随动系统。
(6)按调节动作与时间得关系,可分为 断续控制系统与连续控制系统;
(7)按系统中所包含得元件特性,可分为 线性控制系统与非线性控制系统。
机电传动控制课件
第一节 机电传动控制系统得组成与分类
一、自动控制系统分类: (1)从组成原理上分类
开环控制系统: 特点:系统简单;控制精度不高。 闭环控制系统: 特点:系统较复杂;控制精度高。 (2)按反馈方式得不同,可分为 转速负反馈、电势负反馈、电压负反馈及电流 正反馈控制系统; (3)按系统得复杂程度,可分为 单环自动调节系统与多环自动调节系统;
3)调速得平滑性,通常用两个相
邻调速级得转速差来衡量。
S2
n02 nN n02
D nmax
nmax
nmin n02 nN
nmax S2
nN (1 S2 )
第二节 机电传动控制系统调速方案选择
动态指标:
1)最大超调量
MP
nmax n2 n2
100%
2) 过渡过程时间 T
3) 振荡次数 N
第一节 机电传动控制系统得组成与分类
二、一般自动控制系统组成:
比较
给定 Ug + U 放大
环节 — EBR 调节环节
执行 环节
测量 环节
扰动
被调 被调量
对象
n
第二节 机电传动控制系统调速方案选择
一、调速方法 ➢纯机械方法调速: 通过变速齿轮箱或几套变速皮带轮 或其她变速机构来实现; ➢纯电气方法调速: 通过改变电动机得机械持性实现, 这时机械变速机构简单、只一套变速齿轮或皮带轮; ➢电气与机械配合调速: 用电动机来得到多种转速,同 时,又用机械变速机构得换档来进行变速。
8K
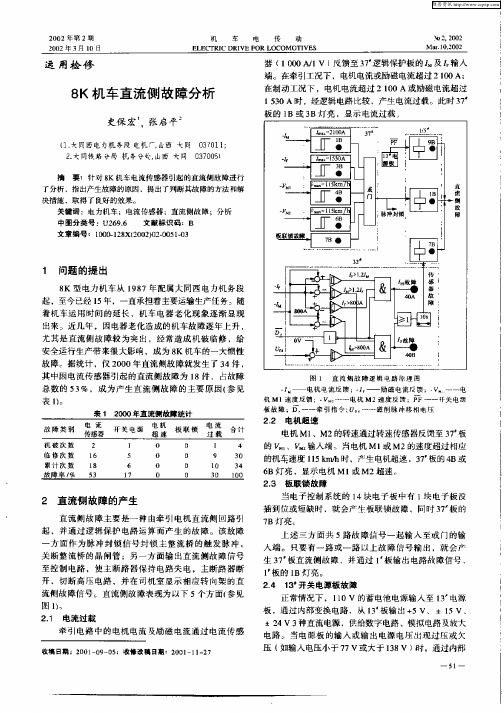
在 牵引工 况且磁场 削弱未投 入 的情 况下, 电机 电流 ^及励磁电流 值应 近似相等慨 一09 ^ 。当电机 电流 . ) 6 L> 0 80A且 ^ 1 / >. ; 2 ,持续 l 以上时 ,产生电机电流传 0s 感 器故障信号 ,3 的 4 A灯亮 ,显示 电机 电流传感 3板 0 器故障 。当励磁 电流 k 8 0 > 0 A且 > . 1 ^、持续 1 上 2 0s 时 ,产生励磁 电流传感器故障信号 ,3 的 4 B灯亮 , 3板 0
流侧故 障信号 。直流侧故 障表现为 以下 5个方 面r 参见
图 1。 1
21 电 流 过 载 .
牵 引 电路 中的 电机 电流及 励磁 电流通过 电流 传感
啦稿 日期 : 0 1 0 — 5 2 0 — 9 0 ;收 修改稿 日 :2 0 — 1 2 期 0 1 1—7
维普资讯
2 直流侧故障的产 生
直流 侧故 障主要 是一 种 由牵引 电机直 流删 回路 引 起 ,并通 过逻 辑保护 电路 运算 而产 生 的故 障 。该 故 障
一
当电子控制系统 的 1 电子 板 中有 1 电子板没 4块 块 插到位或短 缺时 ,就会产 生板联 锁故障 ,同时 3 7 板的
7 B灯 亮 。
22 电机 超 速 .
电机 M1 、M2的转速通过转速传感器反馈至 3 7 板 的 . : 、 输入端 。当电机 M1 M2的速度超过相应 或
的机车速度 15 m/ 1 h时,产生 电机超速 ,3 k 7板的 4 B或
6 B灯 亮 ,显 示 电机 M 1 M2超 速 。 或
23 扳联锁 故障 .
决措施 ,取得 了良好的效果。 关键词 :电力机车 ;电流传感器 ;直流侧故障 ;分析 中图分类号 :U 6 . 2 96 文献标识码 :B 文章编号 :10 _2 X(0 20 .0 1 3 0 o1 8 2 0 )20 5 - 0
电力机车电器第七章

第一节 司机控制器
三、HXD3型电力机车司机控制器
HXD3 型 电 力 机 车 两 端 司 机 室 操 纵 台 上 各 装 一 台 S640U-B型司机控制器。
第一节 司机控制器
1.结 构 从司机控制器面板上看:有两个控制器,一个为推 拉式主手柄,它是机车调速用控制推杆,它分为“牵引” 区域、“0”位区域、“制动”区域。另一个为换向手柄, 它是用于机车换向操纵,有“后”“0”“前”3个位置。 2.动作原理 司机控制器的面板上有主手柄、换向手柄两种可操 作机构。
第三节 传感器
1)按被测物理量分类 2)按工作原理分类 3.磁平衡式霍尔电传感器 磁平衡式霍尔电传感器是采用霍尔器件并引进瑞士 LEM 公司的技术——磁平衡原理制成的电传感器。 1)霍尔器件的工作原理
第三节 传感器第三节 传感器来自2)LEM传感器的工作原理
3)LEM传感器的特点
第三节 传感器
二、电流传感器
2.技术参数 触头S847W2A2b参数 触头S800A/SB参数 防护等级(污染等级3)(整机) 寿命
第三节 传感器
一、概 述
1.传感器的定义 传感器是借助于检测元件接收一种形式的信息,并 按照一定规律将它转换成另一种信息的装置。 2.传感器的分类 随着电子计算机、生产过程自动化、生物医学、环 保、能源、海洋开发、遥感、遥测、宇航等科学技术的 发展,从太空到海洋,从各种复杂的工程系统到日常生 活的衣食住行,都广泛采用了各种传感器。
第一节 司机控制器
2)主要技术参数 2.TKS14A型主司机控制器 1)结 构 TKS14A型司机控制器由上、中上、中下、下4层构 成,各层之间由钢板隔开,并由六方支柱支撑;上层 (面板上)主要有手轮1、手柄2;中上层主要为机械联 锁装置,包括作为联锁用的凸轮组3、4及定位用的凸轮 组5;中下层包括作为控制用以实现电逻辑要求的凸轮架 6和安装在其上的凸轮块7以及辅助触头盒8;下层主要有 电位器9及接线插座10。
《机车电传动与控制》

2021/3/8
6
2021/3/8
7
6. 电力机车控制系统与控制特性
① 8K机车
②
控制系统
机车特性曲线
② SS4机车
③
控制系统框图
④
控制方式
2021/3/8
8
8K机车控制系统
2021/3/8
9
机车控制
产生司机控制指令(特性控制器)
转向架控制
按司机指令,综合各种因素和限制条件 形成实际控制机车主电路负载电流的参 考电流IREF,实现主电路电流、电压的 (闭环)控制调节。
① 为了保证电力机车正常运行,机车上设有三 相 交流辅助电路,以供采用三相鼠笼式异 步电动机驱动的辅助机械装置(如冷却通风机、 油 泵、压缩机等)之用。
② 三相交流辅助电源由机车单相交流电源变换 而 来。三种方变换法: 旋转式劈相机 电容分相法 半导体静止逆变器
③ SS1机车辅助电路(旋转式劈相机Y型联接)
2021/3/8
(2-6-10)
2
2021/3/8
3
3. 电气制动---再生制动
8K机车再生制动 工况主电路:
全控桥电路 牵引电动机他励
2021/3/8
4
4. 减小谐波与功率因数补偿问题 采用功率因数补偿器 L-C, R-C, R-L-C
消除或减小三、五次谐波为主要目的
2021/3/8
5
5. 电力机车辅助电路
现代粘着控制方法的一个显著特点是能够自动搜寻粘着峰值点, 并使粘着工作点保持在粘着峰值点的附近,从而能够获得较高的粘着利 用率。根据搜寻粘着峰值点方法的不同,现代粘着控制方法可以分为蠕 滑速度法和粘着斜率法两大类。
ED=CenDΦD=IDz(Rz+∑RD)=IDzRz’
8K
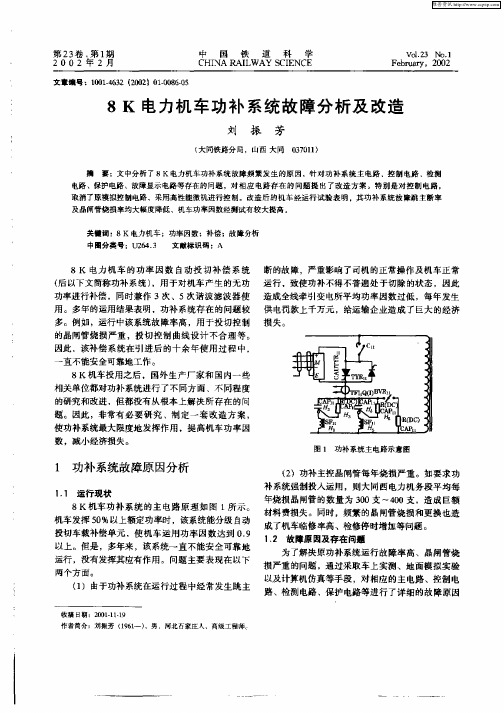
直不能安全可靠地工作 。 8K机车投 用之后 ,国外生产厂家和 国内一些
相关单位都对功补系统进行了不 同方面 、不 同程度 的研究和改进 ,但都没有从根本上解决所存在的问 题。因此 ,非常有必要研 究、制定 一套 改造方案 , 使功补系统最大限度地发挥作用,提高机车功率因 数 ,减小 经 济损失 。
维普资讯
第2 卷 , 1 3 第 期 2002年 2月
文章编号 :10 .6 2 (0 2 10 8 .5 0 14 3 2 0 l0 .0 60
中 国 铁 道 科 学
C NA J HI RA LWAY CI S ENCE
两个方 面 。
()由于功补 系统 在运 行过 程 中经 常发 生 跳 主 1
以及计算机仿真等手段 ,对相应 的主电路 、控制电 路、检测电路 、保护电路等进行了详 细的故障原因
收 穑 日期 : 20 .11 0 11 .9
作者简介:刘振芳 ( 9 卜一 , ,河北石家庄人,高级工程师 16 ) 男
电路 、 保护 电路 、故障显示 电路等存在的问题 , 相应 电路 存在 的 问题提 出 了改 造 方案 。特 别是 对控制 电路 , 对 取消 了原模拟控制电路 ,采用高性能微机 进行 控制 :改造后 的机 车经运行试 验表 明 , 功补系统 故障跳 主断 率 其
及 晶闸瞥烧损率均大 幅度降低 ,机车功率因数经测试 有较 大提高 。 关量 词 :8K电力机车 功率因数 ;补偿 ;故障分析
. 设备产生的谐波电流也流人本车的功补系统,从 而 2 1 1 方案介 绍 易使功补系统产生过电流 , 严重 时造成 晶闸管过流 吸收 电网谐 波 电流 的主要 原 因在 于滤 波器 的谐
烧损。
8T电机车教材

第七章蓄电池电机车【8t】第一节主要技术特征名称:双驾驶室防爆特殊性蓄电池电机车型号:CTL8-6-110-B型号含义:C—煤矿用机车T—蓄电池防爆特殊型L—两端司机室8—电机车粘重8t6—电机车轨距600mm110—电机车标称电压(110V)B—斩波调速第二节主要组成部分一、电气部分主要组成:电机车电气部分由蓄电池电源装置、插销连接器、司机控制器、牵引电动机等电气装置及连接导线构成。
1、蓄电池电源装置:由蓄电池组和电源箱构成,为机车提供电源。
2、插销连接器:用于接通电源和机车电路,内置熔断器起保护整机电路的作用。
3、司机控制器:司机控制操作面板上有换向开关、调速手柄、灯开关、喇叭按钮,内部有换向触头、接触组、数字电压表、霍尔速度给定器、照明用电源盒和斩波器,用于控制机车。
1)换向开关由2组接触铜片组成,完成两个电机的“0”位、“向前”、“向后”三个工作状态。
2)调速手柄用于控制电机车的启动、调速、全速及停止,与换向开关互锁。
3)斩波器由IGBT、续流二极管、电解电容、无感电容、霍尔电流传感器及控制驱动盒电路等组成。
所有原件安装在铝散热板上,铝散热班固定在防爆外壳上,通过防爆外壳传热。
4)照明开关安装在斩波调速控制器面板上,有“0”位、“前灯”、“后灯”三个工作状态,完成白灯、红灯的转换。
5)喇叭按钮安装在斩波调速控制器面板上,控制外电喇叭。
6)霍尔速度给定器安装在固定支架上,发出速度给定信号。
7)照明用电源盒安装在主控制器内为喇叭、照明灯提供电源。
8)数字电压表安装在控制器内,设有观察窗,便于观察电源电压。
4、牵引电动机:为电机车提供动力。
二、机械部分电机车机械部分由车架、行走装置、弹簧系统、制动系统、撒砂装置、缓冲装置、顶棚等主要部件组成。
1、车架车架由钢板焊接而成,是电机车的主体构件,起传递牵引力,安装电气设备和机械零件作用。
整个车架由两块隔板分成三个室,前、后室与顶棚一起构成两端司机室,司机室内安装有司机控制器等司机操作设备及电机车保护设备;中间为机械室,安装有行走、制动、撒砂、弹簧及部分电气设备。
内燃机车电力传动控制
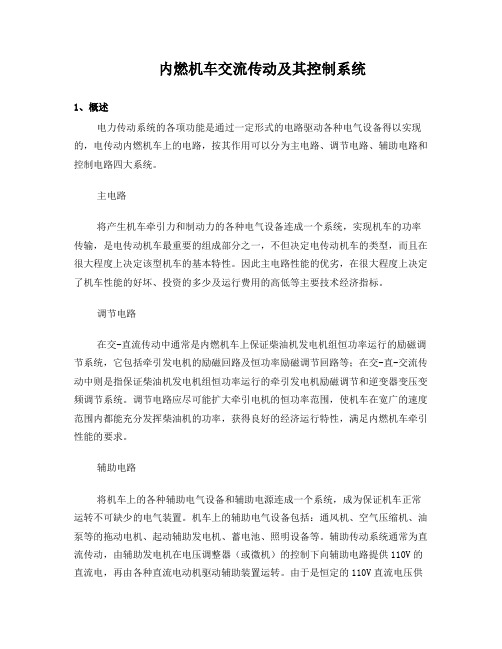
内燃机车交流传动及其控制系统1、概述电力传动系统的各项功能是通过一定形式的电路驱动各种电气设备得以实现的,电传动内燃机车上的电路,按其作用可以分为主电路、调节电路、辅助电路和控制电路四大系统。
主电路将产生机车牵引力和制动力的各种电气设备连成一个系统,实现机车的功率传输,是电传动机车最重要的组成部分之一,不但决定电传动机车的类型,而且在很大程度上决定该型机车的基本特性。
因此主电路性能的优劣,在很大程度上决定了机车性能的好坏、投资的多少及运行费用的高低等主要技术经济指标。
调节电路在交-直流传动中通常是内燃机车上保证柴油机发电机组恒功率运行的励磁调节系统,它包括牵引发电机的励磁回路及恒功率励磁调节回路等;在交-直-交流传动中则是指保证柴油机发电机组恒功率运行的牵引发电机励磁调节和逆变器变压变频调节系统。
调节电路应尽可能扩大牵引电机的恒功率范围,使机车在宽广的速度范围内都能充分发挥柴油机的功率,获得良好的经济运行特性,满足内燃机车牵引性能的要求。
辅助电路将机车上的各种辅助电气设备和辅助电源连成一个系统,成为保证机车正常运转不可缺少的电气装置。
机车上的辅助电气设备包括:通风机、空气压缩机、油泵等的拖动电机、起动辅助发电机、蓄电池、照明设备等。
辅助传动系统通常为直流传动,由辅助发电机在电压调整器(或微机)的控制下向辅助电路提供110V的直流电,再由各种直流电动机驱动辅助装置运转。
由于是恒定的110V直流电压供电,各辅助直流电动机基本不能调速,只能按工况以一定的转速运转或停止,使辅助系统并非保持在最佳工况下运转,工作效率不高。
另有一部分辅助装置则是由机械或液压驱动,工作效率同样不高。
因此,为提高机车整个辅助系统的性能及效率,近年来开始发展辅助交流传动系统,辅助装置的拖动电机为交流电动机,能够根据工况的变化进行变频或变极调速,使辅助系统处于最佳工作状态及工作效率。
控制电路将控制主电路和辅助电路各电气设备的控制电器、信号装置和控制电源连成一个电气系统,实现对机车的操纵和控制。
电传动控制原理第六章 8K型电力机车
④
M
T12
ud
0
① ②
t t
③
总结:通过不对称触 发全控桥运行在半控 桥状态 T12、T14: 二极管工作状态
iT11
iT12
②
t
iT13 iT14
④
③
T11、T13: 晶闸管工作状态
t
t t
④
①
iD23 iD24
⑤
二、半控桥牵引工况时的工作原理 L
①:电源电压正半周
(上正下负)t = 触 发T21 IT21 = ID24 = Id
T13 Ud T14
②
U2 + T12
M
全控桥牵引工况时的工作原理:
L
③:电源电压负半周
(上负下正)t = + 触发T13 IT12 = IT13 = Id
- T11
T13 Ud
③
U2 + T12
M
T14
L ④:电源电压正半周(上
+ T11 U2
-
T13 Ud T14
正下负)t = 2+0 触 发T14 IT13 = IT14 = Id
• = C:选取足够的值,固定不变 随的改变而变化 eg. 8K = 9° BЛ 80P = 18°~ 22°
四、8K机车再生制动的工作原理
L ①:电源电压正半周
(上正下负)t = -0 触发T11 IT11 = IT14 = Id
①
+ T11 U2
-
T13 Ud T14
-
②:电源电压负半周
①
M
D241 T223 T243
T221 T222
D242
8K型电力机车IGBT辅助逆变器的控制与驱动
Abstract: The auxiliary IGBT i nv erter rated 50kV A was equipped to 8K electric locomotive f or t est operation si nce Oct ober 1996, wi th sati sfacto ry operating sta te hereaf ter. The desig n considerations such as the configuration selection, optim um control and driv e ci rcui ts are presented. The EM C desig n and short circuit pro tection for IGBT w as especially focused. Experim ental result s v alidating the proposed structure are also presented. Keywords: elect ric locomo tive; IGBT i nv erter; driv e ci rcuit
郑琼林 , 李 威 , 郝荣泰
(北方交通大学 机械与电气工程学院 , 北京 100044)
摘 要: 8K 型电力机车 IGB T辅助逆变器于 1996年 10月初装车试运行 ,至今运行状况正常。本文介绍了该逆变 器方案的比较选择、控制电路和驱动电路。控制电路由电源变换、脉冲分配和检测保护环节 三部分组成 ;驱动电路 重点介绍了减少电磁干扰的设计要求和 IG BT短路检测与保护 的参数选择。 同时还给出部分试验结果。 关键词: 电力机车 ; IGBT 逆变器 ; 驱动电路 中图分类号: U 264; T M 461 文献 标识码: A
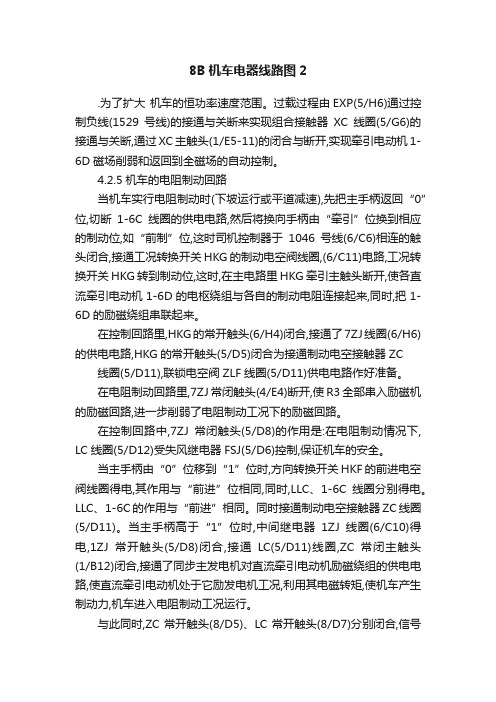
8B机车电器线路图原理

8B机车电器线路图原理8B机车电器线路图一、主回路原理机车电路图是表明机车全部电机、电器、电气仪表等元件的电气连接关系图,也是,控制机车各部分协调工作的中枢系统。
也是机车操作和电气系统安装、维护和检查使用的重要工具书。
一、牵引工况1、主发电机向牵引电动机的供电电路(以第一电机为例)主发电机所发出的的三相交流电由其输出端D1、D2和D3经由07、08、09三组*6=18根导线送至整流柜1ZL,1ZL的正端输出通过10-15号导线送至电控接触器1C-6C主触点,供给牵引电机1D-6D,其电路为:1ZL(+)--10--1C--40--1D电枢--34--1LH--130--HKG--151--HKF --28--1D励磁绕组--22--HKF--176--HKG--16--1ZL(-) 该电路受控于主接触器(1C-6C)主触头,并通过工况转换开关使牵引电机进入牵引工况,当1C控制电路得电接通时,其主触头闭合,牵引电机1D转动,驱动机车前进。
2、机车前进和后退的转换电路东风型内燃机车通过改变牵引电动机励磁电流方向,使牵引电机正传或反转,从而使机车前进或后退。
前进工况:(1D为例)1ZL(+)--10--1C--40--1D电枢--34--1LH--130--HKG--151-HKF --28--1D励磁绕组C1--C2--22--HKF--175--HKG--16--1ZL(-) 后退工况:1ZL(+)--10--1C--40--1D电枢--34--1LH--130--HKG--151-HKF --22--1D励磁绕组C2--C1--28--HKF--HKG--16--1ZL(―)该电路受控于主接触器(1C-6C)主触头,控制主发电机F向牵引电动机供电,并通过方向转换开关HKF改变牵引电机和励磁绕组的励磁电流方向,从而改变机车的运行方向。
机车后进位同理,不同的是HKF将1D-3D的励磁电流方向连接成C2-C1,将4D-6D励磁电流方向连成C1-C2,这样保证了机车在运行方向一致。
机车车辆传动与控制(DOC)
机车车辆传动与控制(DOC)机车车辆传动与控制是机车工程领域中最基础的技术之一。
机车车辆传动与控制是指机车的动力传递和控制系统,通过控制机车的加速度和速度,使机车在不同的速度下发挥出最大的效能和性能。
本文将从机车车辆传动和机车控制两个方面来进行分析,旨在为读者提供机车车辆传动和控制系统的基本知识,以及相关技术的应用。
机车车辆传动机车车辆传动是机车工程中最基础的技术之一,主要涉及机车动力传递和转换系统。
传动系统可以将发动机中产生的动力传递到机车轮胎上,使机车能够正常行驶。
机车车辆传动通常由多个系统组成,包括发动机、离合器、变速器、传动轴和轮胎等。
在机车车辆传动系统中,离合器和变速器是两个最基础的组件。
离合器离合器是机车车辆传动系统中最重要的组件之一,主要用于控制机车的加速度和速度。
离合器的主要作用是将发动机的动力传递到变速器中,而不会让机车出现任何的抖动情况。
如果离合器出现问题,会导致机车运行不稳定,造成机车的损坏和安全隐患。
变速器变速器是机车车辆传动系统中的另外一个非常重要的组件。
变速器的主要作用是将发动机的转速调整到合适的轮速,并将发动机的动力传递到传动轴和轮胎上。
在不同的情况下,需要选择不同的变速器档位,来使机车得以正常运行。
机车控制机车控制系统是指机车运行过程中的电子控制系统。
机车的控制系统主要分为两大类,即机车行驶控制系统和机车安全附件控制系统。
机车行驶控制系统机车行驶控制系统主要用于控制机车在各种路况下的加速度和速度。
机车行驶控制系统通常由以下几个部分组成:•制动系统:用于减速和停车•转向系统:用于控制机车的转向控制•加速系统:用于控制机车的加速和减速•驱动系统:用于控制机车的输出功率机车安全附件控制系统机车安全附件控制系统用于保障机车工作人员和乘客的安全,在机车发生危险情况时提供相关的安全措施。
机车安全附件控制系统通常由以下几个部分组成:•防爆门系统:用于防止机车发生爆炸或火灾•消防系统:用于提供灭火器材•速度限制器:用于调整机车行驶速度,使其不会过快或者过慢结论机车车辆传动系统和机车控制系统是机车工程领域中最基础的技术之一,对于机车的工作效率和安全运行非常重要。
?8B机车电器线路图2
8B机车电器线路图2.为了扩大机车的恒功率速度范围。
过载过程由EXP(5/H6)通过控制负线(1529号线)的接通与关断来实现组合接触器XC线圈(5/G6)的接通与关断,通过XC主触头(1/E5-11)的闭合与断开,实现牵引电动机1-6D磁场削弱和返回到全磁场的自动控制。
4.2.5机车的电阻制动回路当机车实行电阻制动时(下坡运行或平道减速),先把主手柄返回“0”位,切断1-6C线圈的供电电路,然后将换向手柄由“牵引”位换到相应的制动位,如“前制”位,这时司机控制器于1046号线(6/C6)相连的触头闭合,接通工况转换开关HKG的制动电空阀线圈,(6/C11)电路,工况转换开关HKG转到制动位,这时,在主电路里HKG牵引主触头断开,使各直流牵引电动机1-6D的电枢绕组与各自的制动电阻连接起来,同时,把1-6D的励磁绕组串联起来。
在控制回路里,HKG的常开触头(6/H4)闭合,接通了7ZJ线圈(6/H6)的供电电路,HKG的常开触头(5/D5)闭合为接通制动电空接触器ZC 线圈(5/D11),联锁电空阀ZLF线圈(5/D11)供电电路作好准备。
在电阻制动回路里,7ZJ常闭触头(4/E4)断开,使R3全部串入励磁机的励磁回路,进一步削弱了电阻制动工况下的励磁回路。
在控制回路中,7ZJ常闭触头(5/D8)的作用是:在电阻制动情况下, LC线圈(5/D12)受失风继电器FSJ(5/D6)控制,保证机车的安全。
当主手柄由“0”位移到“1”位时,方向转换开关HKF的前进电空阀线圈得电,其作用与“前进”位相同,同时,LLC、1-6C线圈分别得电。
LLC、1-6C的作用与“前进”相同。
同时接通制动电空接触器ZC线圈(5/D11)。
当主手柄高于“1”位时,中间继电器1ZJ线圈(6/C10)得电,1ZJ常开触头(5/D8)闭合,接通LC(5/D11)线圈,ZC常闭主触头(1/B12)闭合,接通了同步主发电机对直流牵引电动机励磁绕组的供电电路,使直流牵引电动机处于它励发电机工况,利用其电磁转矩,使机车产生制动力,机车进入电阻制动工况运行。
《电力机车控制》教学课件—07电力机车自动控制

§3 SS9机车微机控制系统
8.交叉保护
当一个插件箱故障时, 微机柜的转换开关要打在故障位。 此时正常插件箱仍然对所控制的转向架进行闭环控制。 而故障插件箱的开关电源不工作, 故障插件箱所控制的 对应转向架则进行跟随控制。
§2 微机控制系统原理 (2)控制方法
控制原理图
速度给定 速度控制 电流控制 限压环节
脉冲发 生器
微机控制柜
电压传感器 电流传感器 速度传感器
电动机
硅机组
§2 微机控制系统原理
(2)控制方法
➢ 反馈控制; ➢ 速度与电流双闭环,电压限制作为辅助
手段;
➢ 微机控制系统的作用:比较计算、数值 变换——由差值到整流晶闸管的导通角;
§3 SS9机车微机控制系统
4.空电联合制动控制
联合制动控制逻辑: ①电制动优先原则。即空气制动的投入必须以
制动电流达到与机车速度对应点的最大值,且 持续一定的时间为前提。一旦空气制动投入, 则制动电流维持最大限制值,不受准恒速特性 控制,直到空气制动缓解后1分钟。 ②机车速度超过给定速度且其差值达到5 km/h 时投入一级空气制动;差值达到15 km/h 时追 加减压一次;差值未达到15 km/h,但5分钟后 仍未缓解时追加减压一次。
§2 微机控制系统原理
(1)牵引/制动主电路
在制动工况下,牵引电动机作他励发电机运行, 制动力的调节方法可由下面公式看出:
M=CM ΦIZ IZ=(E+Ud)/Ri IZ=(CeΦ n+ Ud)/Ri E=CeΦ n 上面公式可看出,当Ud为0时(此时未进入最 大励磁限制),制动力矩会随机车速度下降而 减少,为了使机车低速时也能产生足够制动力, 可开通硅机组增加Ud,以维持IZ,即所谓的加 馈制动。
机电传动控制系统的基础 (机电传动控制)(精选)共20页
谢谢!
51、 天 下 之 事 常成 于困约 ,而败 于奢靡 。——陆 游 52、 生 命 不 等 于是呼 吸,生 命是活 动。——卢 梭
53、 伟 大 的 事 业,需 要决心 ,能力 ,组织 和责任 感。 ——易 卜 生 54、 唯 书 籍 不 朽。——乔 特
55、 为 中 华 之 崛起而 读书。 ——周 恩来
1、不要轻言放弃,否则对不起自己。
2、要冒一次险!整个生命就是一场冒险。走得最远的人,常是愿意 去做,并愿意去冒险的人。“稳妥”之船,从未能从岸边走远。-戴尔.卡耐基。
梦 境
3、人生就像一杯没有加糖的咖啡,喝起来是苦涩的,回味起来却有 久久不会退去的余香。
机电传动控制系统的基础 (机电传动控制) 4、守业的最好办法就是不断的发展。 5、当爱不能完美,我宁愿选择无悔,不管来生多么美丽,我不愿失 去今生对你有你。 (精选)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T4
T2
D2
T5
RM3
D3
Ud2
移相 检测
电机端压 开关 检测 控制电压
T6
D4
§7.2 8K型电力机车控制系统
8K机车控制系统:双闭环控制系统 内环是电流环——恒流无静差调速系统 外环是速度环——准恒速控制系统
控制流程:司机手柄指令器 特性控制器 牵引制动转换开关 给定积分器 调制器 传输总线 解调器 最大值限制器 防空转滑行装置 PI调节器 移相触发系统 整流电路
6
4 2 2 4 6 8 v IA2 R159
V457
– A2 +
V458
10K
2.
制动特性曲 线形成电路
-15V -V I0
R212 R216 R217
R220
V472
假设A处断开: A3: IA3 = K3v – K4I0 + C1 A4: IA4 = C2 V584 、 V591 最大值选择器
第七章 8K机车电子控制系统
§7.1 SS4型电力机车控制系统
两手柄: 电压指令手柄 给定电机端压 可实现恒流 电流指令手柄 给定电机电流 和恒压控制 司机电压给定 电压延时 电压参考值UREF PI调节器 电流给定 电流延时粘着限制 电流参考值IREF PI调节器
MAX
A1、A2构成全波整流电路 网压正半周:A1负 A2正 网压负半周:A1正 A2负
UN
50K
50K
– A1 +
LM124 22K
D1
Uo
Uo
UN
22K
– A2 +
D2
Uo t
B:积分电路
LM139:电压比较器 1. RU没有脉冲 场效应管截止 给电容C充电 t= U 达到最大值
RU
6
制动 4
2
0
F(kN) 600
184+4000t+ 9%0 1200A 0%0 800A
400
手柄在4位:起动电流为800A 平直道 :牵引力 阻力 V= 38km/h 牵引力=阻力 稳定运行
8
80 8 v(km/h)
200 400A
2
20 -200 2
4
40 4
6
60 6
1
9%0 :牵引力 阻力 手柄必须在第6位才能起动
– LM139 + –15V
10K
D:d形成电路
100K U UF 100K 100K +15V LM124 UE
+5+
–15V
–15V
UF -U t
UE:直流控制电压 UF -U:同步信号电压
当UE UF -U 时: d 输出高电平
d
t
E:有源滤波
68n
+5V 392K
UN
392K 5K7 68n
+15V A714
– +
do
LM139
–
+
–15V
UN
U
A714:滤波器 50Hz有源带通滤波器 LM139:过零比较器
do
单双边变换电路
移相控制电压ec
RM1 RM2 RM3
司机电压给定
电压反馈
UREF
电压延时
PI调 节器
0~-10V MAX 司机电流给定 单双边变换
ec
IREF
电流延时 粘着限制
PI调 节器
电流反馈
连续控制器 -3 -3 RM1 1 2 RM2
T3
RM2
T1
RM1
D1
Ud1
ec
-10~10V
偏压控制 网压过零ABC A B C RM3 3 180 °或 触发 0° 系统
信号形成电路
U 积分 器 UF Uo 移相 d 器 Ue
d0 RU
ds d0’ d’
700s
滤波器 比较器
RU
延时 ds d0’ d’ UF -U
d0
d
控制过程:
网压同步信号UN进行两方面的处理:
1. UN 全波整流 Uo 积分器 同步余弦信号U UF UF -U 直流控制电压Ue d
两级控制:机车控制
转向架控制
+15V
F
牵引
给定积分器 调制
总线
Iss
v
–15V
速度反馈 限制器 解调
制动
网压
Iss
Is
防 Iref 空 转
PI
UE
电流反馈 速度反馈
一、特性控制:单手柄特性控制器
10
牵引 6 4 8 11
2 0
11 10 8
顺时针转动: 牵引工况 分0~11级 逆时针转动: 制动工况 分0~11级 单手柄级位:n 电流指令 :I = 200 • n (A) 速度指令 :v = 10 • n (km/h)
– A6 +
R187 100K
IS2
R180 100K -15V
积分电路工作原理:
A5:放大倍数很大 工作在饱和区 A6:积分器 1. 当IS1突升后,A5输出负饱和 V462 V461阻断 V460 V463导通 -15V R180 R184 C 输出电压IS2为正 直线上升 时间常数为 = R•C = ( R184 + R180 ) • C74 = 6.6(S)
2. UN 滤波器比较器 d0 延时电路 各种
注意:
控制信号RU 、d0’、d’、ds
d0’ d’保证晶闸管承受正向阳极电压才允许获得触发脉冲 1. 保证移相电路有足够的复位时间 2. 在网压过零附近,晶闸管正向阳极电压太低或有不稳定 的毛刺时不应施加触发信号
+15V
A:全波整流电路
+15V
R161
R171
1.
牵引特性曲线形成电路
V455 -V I0 R163 V456 -15V
假设A处断开: A1: IA1 = K1I0 – K2v
A2: IA2 = I0
IA
R154
V456 、 V458 最小值选择器
IA1 8
R156 R165
– A1 +
R151
R164
IS1
A R167 10K
2. 当IS1突降后,A5输出正饱和 V462 V461导通 V460 V463截止 +15V R177 R182 C 输出电压IS2直线下降 时间常数为 = R•C = ( R182 + R177 ) • C74 = 2.8(S)
UN
三、晶闸管触发系统
UN 全波 整流
Uo
t t t t t t t t t
v
– A3 +
R253 V476
V584
IS1
A
IA4
+15V IA
– A4 +
R251
V591
IA3
二、积分延时电路
+15V
R176 1M IS1 47K5 R173 R177 220K
C74 10
V467
– A5 +
R175 1M
V460
V462 R216 56K
R174 47K5
V461
V463 R184 560K
U
t
t +15V 22K S G 68n D LM139
+5V
10K RU
+
2. 加入RU负脉冲 场效应管导通 Uo 78K 使C迅速放电 形成余弦信号
–
– LM124 +
–15V
U
10K
C:网压峰值记忆回路
U S G
D
– LM124 +
C +15V
UF +5V 10K ds
每半周内,U 达到最大值时: 输入网压过零信号ds 比较器输出高电平 场效应管导通 UC = U 电压跟随器 UF