光纤陀螺信号处理
光纤陀螺 y波导调制 零偏
光纤陀螺y波导调制零偏
摘要:
一、光纤陀螺简介
二、Y 波导调制技术
三、零偏问题及解决方案
正文:
光纤陀螺是一种基于光纤技术的光学陀螺仪,它利用光纤中的光程差来测量旋转角速度。
光纤陀螺具有高精度、高灵敏度、抗干扰能力强等优点,被广泛应用于航空航天、地球物理、惯性导航等领域。
Y 波导调制是一种光纤陀螺中的关键技术。
它通过在光纤中传输两个相互正交的信号,实现对光纤陀螺的调制。
Y 波导调制技术可以提高光纤陀螺的灵敏度和测量范围,同时减小零偏误差,提高光纤陀螺的测量精度。
零偏是光纤陀螺中的一个重要问题。
零偏是指在没有任何旋转的情况下,光纤陀螺的输出信号不为零。
零偏误差会对光纤陀螺的测量精度产生影响。
为了解决零偏问题,研究人员提出了多种解决方案,如利用参考信号、采用Y 波导调制技术、使用温度传感器等。
综上所述,光纤陀螺是一种高精度、高灵敏度的光学陀螺仪,Y 波导调制技术是光纤陀螺中的关键技术之一,可以提高光纤陀螺的灵敏度和测量范围,同时减小零偏误差。
光纤通信中的光纤陀螺技术研究
光纤通信中的光纤陀螺技术研究光纤通信在现代通信技术中占有重要的地位,它不仅提高了网络的传输速率和带宽,还提高了网络的可靠性和安全性。
光纤通信中的光纤陀螺技术是一项核心技术,可以在光学通信领域中发挥出重要作用。
本文将详细探讨光纤陀螺技术的原理、应用场景以及当前的研究进展。
一、光纤陀螺技术的原理光纤陀螺是一种将惯性导航传感器的想法与光学传感技术结合的仪器。
它利用光的属性,通过测量光的干涉来检测旋转,并利用检测到的旋转来确定具体方向。
其原理是采用光纤中的光纤环作为检测器,利用光纤中的两束激光束在光纤环中反射出现出变幻,使用光电探测器处理输出信号,可以实时地监测到旋转角速度。
二、光纤陀螺技术的应用场景光纤陀螺技术被广泛应用于惯性导航、火箭制导、天然气采集、地震勘查、精密测量、地球物理勘探、卫星通讯等领域。
以航空领域为例,航空领域的惯性导航系统需要计算对象在空间三维坐标系中的运动状态,并根据该状态实现精确导航和定位。
在这个过程中,光纤陀螺技术可以通过检测飞机的旋转来计算出飞机在空间中的角度和速度,从而帮助导航系统实现更为精确的定位和导航。
三、光纤陀螺技术的研究进展近年来,光纤陀螺技术在实际应用中广泛受到关注,并且取得了一系列令人瞩目的研究进展。
例如,近期研究人员提出了一种高精度、高灵敏度的光纤陀螺,该系统使用了独特的“光纤耦合式陀螺”技术,能够实现在恶劣环境下的高精度测量。
此外,研究人员还提出了一种基于光纤陀螺的高精度声波测量方法,该方法可以实时监测地球板块的运动,并精确测定板块之间的位移。
总之,光纤陀螺技术不仅是一种重要的光学传感器技术,而且是现代通信业中的重要一环。
通过不断地研究和发展,光纤陀螺技术在未来的发展中有望进一步提高其可靠性和实用性,推动光学通信领域的发展。
光纤陀螺的信号处理方案评述
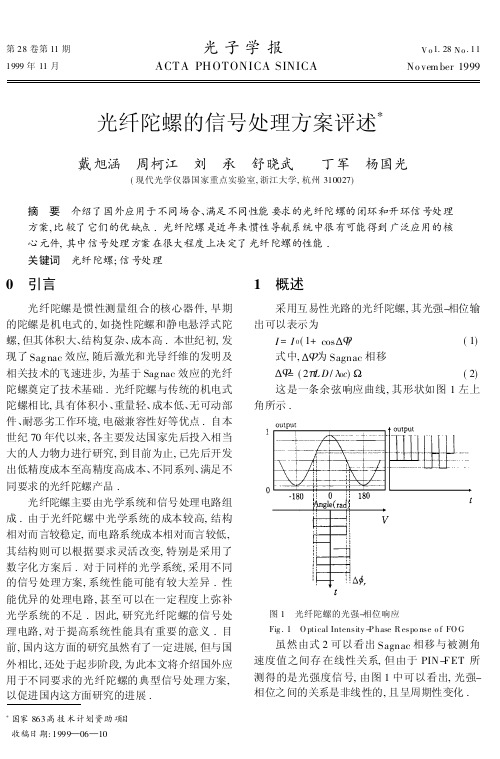
第28卷第11期光子学报V o1.28N o.11 1999年11月 ACTA PHOTONICA SINICA No vem ber1999光纤陀螺的信号处理方案评述*戴旭涵 周柯江 刘 承 舒晓武 丁 军 杨国光(现代光学仪器国家重点实验室,浙江大学,杭州310027)摘 要 介绍了国外应用于不同场合、满足不同性能要求的光纤陀螺的闭环和开环信号处理方案,比较了它们的优缺点.光纤陀螺是近年来惯性导航系统中很有可能得到广泛应用的核心元件,其中信号处理方案在很大程度上决定了光纤陀螺的性能. 关键词 光纤陀螺;信号处理0 引言光纤陀螺是惯性测量组合的核心器件,早期的陀螺是机电式的,如挠性陀螺和静电悬浮式陀螺,但其体积大、结构复杂、成本高.本世纪初,发现了Sag nac效应,随后激光和光导纤维的发明及相关技术的飞速进步,为基于Sag nac效应的光纤陀螺奠定了技术基础.光纤陀螺与传统的机电式陀螺相比,具有体积小、重量轻、成本低、无可动部件、耐恶劣工作环境,电磁兼容性好等优点.自本世纪70年代以来,各主要发达国家先后投入相当大的人力物力进行研究,到目前为止,已先后开发出低精度成本至高精度高成本、不同系列、满足不同要求的光纤陀螺产品.光纤陀螺主要由光学系统和信号处理电路组成.由于光纤陀螺中光学系统的成本较高,结构相对而言较稳定,而电路系统成本相对而言较低,其结构则可以根据要求灵活改变,特别是采用了数字化方案后.对于同样的光学系统,采用不同的信号处理方案,系统性能可能有较大差异.性能优异的处理电路,甚至可以在一定程度上弥补光学系统的不足.因此,研究光纤陀螺的信号处理电路,对于提高系统性能具有重要的意义.目前,国内这方面的研究虽然有了一定进展,但与国外相比,还处于起步阶段,为此本文将介绍国外应用于不同要求的光纤陀螺的典型信号处理方案,以促进国内这方面研究的进展.1 概述采用互易性光路的光纤陀螺,其光强-相位输出可以表示为I=I0(1+cos )(1)式中, 为Sagnac相移=(2 L D/ 0c) (2)这是一条余弦响应曲线,其形状如图1左上角所示.图1 光纤陀螺的光强-相位响应Fig.1 O ptical Intensity-P hase R espo nse o f FO G虽然由式2可以看出Sagnac相移与被测角速度值之间存在线性关系,但由于PIN-FET所测得的是光强度信号,由图1中可以看出,光强-相位之间的关系是非线性的,且呈周期性变化.*国家863高技术计划资助项目收稿日期:1999—06—10为了获得严格的单调线性输入输出关系和较大的动态范围,必须综合运用光学和电路的方法对测得量作信号处理,以满足上述要求.通常,首先需要采用的方法是在系统回路中引入调制波,以方波为例,如图1所示,加上图中所示的方波调制后,光纤陀螺的工作点就被动偏置在±90°位置上了.由图1左上角可以看出,在±90°位置处d I/d 最大,即此处光纤陀螺的灵敏度最大,同时输入输出的线性度也最好.此时光纤陀螺的光强-相位输出可以表示为I=I0[1+cos( ± /2)](3)对应的光强输出如图1右上角所示,此信号经过开关相关调解器锁相放大后,可以表示为I=K・sin( )(4)式中K为等效放大倍数,如上所述,由于在±90°附近具有很好的线性度,当 很小时,可以认为I≈K・ (5)于是可以认为,此时陀螺的输入输出是线性的.此外,由于系统工作点在±90°位置之间来回切换,工作点偏置在+90°和-90°位置的时间相等,因此偏置对系统输出影响的时间平均值为零,即系统虽然加上了调制信号,但从时间平均的角度来说仍然是满足互易性条件的.引入调制波的另一个作用是:把PIN-FET的输出信号由基带平移到更高的频段,这样就可以利用高通滤波器排除低频噪音的影响,从而消除低频干扰的影响,提高了信噪比.目前光纤陀螺常用的信号处理方案主要可以分为两大类:闭环方案和开环方案.闭环方案的基本原理是在上述光路中引入相位反馈元件,在测出Sag nac相移后,用相位反馈元件产生一个与Sagnac相移大小相等,方向相反的非互易补偿相移,使系统相位工作点始终保持在线性度较好的偏置位置附近.由上述分析可知,此补偿相移线性正比于被测角速度,闭环方案通常就把此相移作为输出.目前通常采用铌酸锂相位调制器作为相位反馈元件.开环方案则不采用相位反馈元件,主要靠模拟或数字处理电路提取Sagnac相移,因此结构简单,成本低.其基本原理,以正弦波调制为例,加上正弦调制波后,PIN-FET的输出信号为I=I0[I+cos( + m・sin m・t)](6)式中 为Sag nac相移, m为相位调制幅度, m为调制频率.将上式右边按第一类贝塞耳函数展开,可得I(t)=I0/2{1+[J0( m)+2 ∞n=1J2n( m)・cos(2n m t)]cos( )-2 ∞n=0J2n+1( m)sin[(2n+1) m t]sin( )}(7)上式中,奇次谐波对应Sagnac相移的正弦函数项,偶次谐波对应其余弦函数项,若用解调电路提取出第一、二次谐波分量的幅值I( m)、I( 2m),即可根据=arctan{I( m)J2( m)/I(2 2m)J1( m)}(8)求得对应的Sagnac相移.2 闭环方案闭环方案的关键是如何引入补偿用非互易相移.为了保证光路的互易性,所采用的反馈器本身都是满足互易性要求的,只不过将它们以一定的方式接入光路后,再加上时变信号后,才产生了非互易相移.以相位调制器为例,若给相位调制器加上时变信号,则光在不同时间通过相位调制器时,产生的相移不同.将相位调制器放在光纤环的一端,由于互逆光经过调制器的时间是不同的,其时间间隔为渡越时间=nL/c(9)式中,n为光纤折射率,L为光纤环长度,c为光速.会在光路中引入非互易相移.对于相位调制器,理想情况下,若在相位调制器上加上无限斜坡信号=kt(10)则相位调制器引入的非互易相移为=kt-k(t- )=k (11)这样,只要改变k值,就可以获得不同的非互易相移,以抵销不同角速度对应的Sagnac相移.实际应用中,由于不可能在相位调制器上加上无限斜坡信号,通常采用其它波形实现上述闭环补偿原理.下面分别具体介绍各种闭环信号处理方案.2.1 模拟闭环方案2.1.1 锯齿波解调方案由上述分析我们可以知道,最直接的模拟伺服解调方案是用周期性复位的锯齿波信号来等效无限斜坡信号的锯齿波方案.其典型的系统结构如图2所示.1044光 子 学 报28卷 图2 模拟锯齿波解调方案 Fig.2 Schematic o f a clo sed-lo op gy ro with anglog ser ro dy ne phase mod-demodulat ion如图中所示,此方案采用铌酸锂相位调制器实现动态偏置和相位补偿,采用Lock-in解调PIN-FET输出电流并据此调整补偿信号使探测器输出保持在零位,而补偿信号的频率就反映了被测的Sagnac相移的大小,对应于输入转速值.这时,为了改变引入补偿相移的大小,首先固定锯齿波的幅值,通常设置在2 ,改变其频率,以得到不同的补偿相移.这时在未复位的T- 时间和复位所经历的 时间内所对应的 值相差2 ,由于光纤陀螺响应的周期性,其作用相互等效.因此都可以用于补偿Sag nac相移.采用锯齿波解调方案,能够在光路中引入一个平稳的非互易相移以补偿Sag nac相移,但由于锯齿波的复位时间要尽可能短,以避免引起刻度因子误差,因此要求所采用的相位调制器具有很大的响应带宽.在这类系统中通常采用铌酸锂相位调制器,将所加锯齿波幅值 m设置在2 ,通过改变其频率f m以调整引入的非互易相移的大小以抵销转速信号所引入的Sag nac相移.f m可以表示为f m=(D/n )・ (12)将此频率作为输出,即可反映输入转速值的大小.此方案中,在非复位段和复位段产生的非互易补偿相移分别为2 f m 和2 f m - m,若 m设置在2 ,由于陀螺响应的周期性,上述两段非互易相移经Lo ck-in解调结果应相等.实际应用中,可以检测上述两段时间内的解调输出,以监测 m,使之保持在2 .2.1.2 正弦波方案由于锯齿波方案中所采用的铌酸锂相位调制器成本较高,并且不易与光纤耦合,会带来较大损耗.为了降低成本,人们又转向全光纤方案,即采用光纤调制器代替铌酸锂调制器,此方案成本较低,结构简单,而且由于调制器本身就是由光纤构成,与光纤环容易接续,损耗较小.通常,光纤调制器是由一小段光纤以一定张力缠绕在圆柱形压电陶瓷而成.对于复杂的驱动波形,如锯齿波,包含了较宽频率范围内的许多谐波分量,由于压电陶瓷在其中某些频率分量的作用下会产生机械谐振,对不同谐波分量的响应不一致,因此光纤调制器通常不能用上述波形驱动,而采用频谱简单的正弦波驱动.采用正弦波方案的光纤陀螺,通常在光纤调制器上加上两个信号,一是幅值为 m,频率为f m 的动态偏置调制正弦信号,二是幅值可调、频率为f f的相位反馈正弦波信号、其PIN-FET输出经Lock-in解调后为一随时间变化的正弦曲线.由于其时间平均值为零,不能直接用于补偿Sagnac 相移,通常采用电路选通的方法,即用电路选通解调输出符号相同的固定半周部分(时间平均值不为零),用此部分信号补偿Sagnac相移,使补偿后输出的时间平均值为零.此时,要求反馈正弦波的频率f f小于偏置正弦波的频率f m,以获得较好的时间平均效果.同时f f又必须大于输入转速的变化频率,以保证系统具有足够的带宽.固定反馈正弦波的频率f f,改变反馈正弦波的幅值,即可改变非互易补偿相移的时间平均值,以补偿不同的转速对应的Sag nac相移.将此幅值信号作为陀螺的输出,即可测得转速.上述方案的缺点是虽然输入输出是一一对应的,但线性度不好.为了提高刻度因子线性度,通常是在上述补偿正弦波的基础上,再叠加上频率不同的另一个补偿正弦波分量,当这两个补偿正弦波分量的相位差和幅值差选取恰当值时,可以大大提高输出的线性度.但此时必须使两个补偿正弦波分量的相位差和幅值差保持恒定值,以保证刻度因子的稳定性.即使采用了上述措施,由于压电陶瓷的响应会随温度变化而产生较大变化,会引入刻度因子误差,且输出的被测量是交流信号的幅度值,难以精确测量,这些都限制了采用此方案的陀螺的性能,因此此方案只能用于精度不高的场合.2.2 数字式阶梯波解调方案这种方案是模拟锯齿波解调方案的数字化翻版,其补偿波形如图3所示,它用台阶宽度为 (渡越时间)、高度可调、周期复位的阶梯波来近似模拟锯齿波的作用,两者之间的不同在于数字式方案的输出存在间隔为 的窄而尖的瞬态脉冲,104511期 戴旭涵等.光纤陀螺的信号处理方案评述图3 阶梯波调制原理F ig.3 Schemat ic of dig ital serr odyne pha se mo dulatio n但只要控制好处理电路的选通时间就可以避免其不利影响.由图中可以看出,阶梯波的台阶高度对应于Sagnac 相移的大小,台阶的最小高度反映了闭环系统所能达到的分辨率.由于存在光子散粒噪音,且其频率为×10MHz,远大于系统工作频率,利用噪音的积累效应,可以利用一般的数字器件实现较高的性能.在构成数字闭环时,通常将偏置方波与补偿阶梯波叠加以构成铌酸锂相位调制器的驱动波形.此时要求偏置波与补偿波两者完全同步,由于是数字系统,很容易满足上述要求.图4所示为我们采用DSP构成的数字闭环信号 图4 调制信号及解调结果 Fig.4 T he wav e for m of mo dulatio n signal andt he co rr espo nding demo dulatio n r esult处理方案的输出结果,图中上方曲线为解调结果,下面曲线为偏置波与补偿波的迭加结果.图5所示为陀螺输出随时间漂移曲线,图中纵坐标为漂移量,横坐标为时间,根据图中结果所折算的长期漂移率小于0.2°/小时.在此类闭环系统中,除了采用闭环补偿Sag nac 相移以外,通常还要采用第二闭环控制锯齿波的幅值,使之保持在2 ,以避免阶梯波复位过程对系统输入产生较大影响. 图5 陀螺输出随时间漂移曲线 F ig .5 T he bias per for mance of F OGalo ng w ith the time var iance除了上述的各种方案以外,还研究过其它方案,如利用磁光效应构成相位调制器的方案等,但由于它们实现起来比上述各方案困难得多,因此没有进一步研究下去.3 开环方案开环方案不采用铌酸锂相位调制器补偿Sagnac 相移以此构成线性闭环,而是直接检测PIN -FET 的输出电流中所包含的萨格那克相移的正弦分量和余弦分量,以此一一对应地求出Sagnac 相移及其所反映的角速度,因此结构简单,成本较低.正如前面所述,若直接检测包含在不同谐波分量幅值内的Sagnac 相移的正弦分量和余弦分量来进行测量,由于需要检测交流信号的幅值,很难获得很高的精度,因此通常采用其它方法来实现上述测量原理,目前主要有合成外差法和数字锁相法两种.3.1 合成外差法合成外差法的基本原理是对PIN -FET 的输出信号再加上一级方波调制信号,调制频率与动态偏置调制频率f m 相同,其结果是PIN-FET 的输出信号中包含的各个谐波分量(其频率分别为动态偏置调制频率的整数倍),经过调制后,都产生了一个频率与其相差±f m 的边带信号,刚好与其相邻的谐波分量重叠.这样,每个谐波分量都同时包含了Sagnac 相移的正弦分量和余弦分量;同时应使调制波的幅值为固定值,以保证刻度因子的线性度.运用带通滤波器提取输出中某一频率分量,例如2f m 分量,则输出的两个通道的信号频率相等,都是2f m ,相互之间有相位差,大小为2 s ,将这两路信号输入鉴相器,通过比较信号过零的时间间隔,即可测出它们的相位差,从而测出Sagnac 相移及对应的角速度.由于输入鉴相器的两路信号都是有同一路信1046光 子 学 报28卷号经过调制后产生的,因此可以避免采用两路输入时由于光路和电路中其它器件引入的相位误差.由于采用了鉴相器,系统可以有很宽动态响应范围.而方案中主要的误差源来自所加调制波幅值偏离给定值,两路带通滤波器对同一输入相位响应不同,以及鉴相器在测量两种信号过零间隔时引入的误差.3.2 数字锁相法由于合成外差法主要由模拟电路构成,在实际应用中,由于模拟器件固有的温漂、零漂等因素的影响,会引入一定的误差,因此又出现了一种采用数字电路构成的光路开环,电路闭环信号处理方案,以克服模拟电路的缺点,其结构如图6所示. 图6 数字锁相法原理图 Fig .6 Schematic o f the open -loo p g yr oscope w ithdig ital phase locked lo op sig nal pro cessing图中,PIN-FET 的输出电流,经过高通滤波后,被频率等于正弦调制波频率,占空比可调的数字脉冲信号调制,然后由低频滤波器提取被调制信号的直流分量,此直流分量S ( , )的大小与输入角速度 及调制波占空比 有关,其不同 值所对应的波形如图7所示.将S ( , )作为数字调制波形发生器的输入,以调整 的大小.最终使得直流分量S ( , )保持在零位附近,从而构成电闭环.此时,反馈信号S ( , )可以表示为S ( ,R )=I 0 -1[(cos R )・S x ( )-(sin R )・C x ( )](14)式中S x ( )=∞n =12・J 2(2n -1)( m )2n -1・sin [(2n -1)・ ](15)C x ( )=∞n =12・J 2(2n -1)( m )2n -1×{sgn[co s(2)] ・co s [(2n -12)・ ]+(-1)n ・sgn [sin ( 2)] ・sin [(2n -12)・ ]}(16)图7 数字锁相法方案中不同Sag nac 相移所对应的数字调制脉冲波形. R :Sag nac 相移, :占空比Fig.7 D ig ital w av efor ms for the dig ital phase lo ckedlo op gy ro sco pe for sever al v alues o f Sagnac phase shift . R :sagnac shift , :digital pulse spac-ing当 m 为一定值( m =2.77)时,S x ( )与C x ( )分别近似等于sin ( )和co s ( ),则此时,S ( , )可以近似表示为S ( , )≈(I 0/ )sin( - R )(17)这样,当构成闭环后,S 的值保持在零位附近, - R 很小,可以近似认为此时 - R =0,即 = R ,从而获得 与 R 的线性关系.这种方案的误差源主要有两个:一是 m 偏离设定值2.77,二是数字脉冲调制波与PIN-FET 的输出电流信号有相位差.若能够将 m 的值精确设定在2.77,则 与 m 的最大偏差不超过0.007rad.由于信号解调部分完全由数字电路构成,调整方便,因此是一种很有前途的方案.104711期 戴旭涵等.光纤陀螺的信号处理方案评述4 结论综上所述,光纤陀螺的信号处理方案可以根据实际应用要求灵活选择,要求高精度、大动态范围时通常采用闭环方案,目前被广泛采用的是数字式阶梯波解调方案.而要求低成本的场合则通常采用开环方案,其中,数字锁相法是一种很有前途的方案.参考文献1 Burns W K.Optical Fiber Ro tation Sensing.Bosto n:A cademic P ress,1994:81~1112 Burns W K,Chen Chin-L in,M oeller R P.Fiber-o ptic g yr oscopes with br o ad-band sources.Jo ur nal o f L ig htwa ve T echno lo gy,1983,L T-1(1):98~1053 Ezekiel S,A rditt y H J.Fiber-o pt ic ro tation senso rs.Fiber-Optic R otat ion Sensor s and R elat ed T echno lo gies,1982:2~264 Ber gh R A.D ual-ramp closed-lo op fiber-o ptic gy ro sco pe.SP IE F iber Optic a nd L aser Senso rsⅦ,1989,1169:429~4395 Ber gh R A,L efevr e H C,Shaw H J.A n ov erv iew of fiber-o pt ic gy r oscopes.Journal of Lightw av e T echno log y,1984, LT-2(2):91~1076 V ali V,Sho rt hill D N.F iber ring inter fero meter.A ppl Opt,1976,15,1099~11007 A sami E,Sasaki Y,Hisa H,et al.Inertial g r ade IF O G development status at JAE.SPIE,1996,2837:192~1988 Sakuma K.A pplication of fiber g yr os at JA E,SP IE,1996,2837:72~799 L iu R Y,El-Wailly T F,Dankw o rt R C.T est r esults o f Ho neyw ell′s fir st-g ener ation,hig h-perfo r mance int erfer-o metric fiber-optic g yr oscope.SP IE,1991,1585:262~275GENERAL COMMENTS ON SIGNAL PROCESSING SCHEMEFOR FIBER OPTIC GYROSCOPEDai Xuhan,Zhou Kejiang,Liu Cheng,Shu Xiaow u,Ding Jun,Yang Guoguang State K ey L abor atory of M odern Op tical I nstr umentation,Zhej iang U niver sity,H ang z hou310027R eceived date:1999-06-10Abstract With consideratio n on application,it is presented typical closed-loop and o pen-loop FOG sig nal processing scheme used for different application and fulfilled different requirem ents.Both ad-vantag es and disadv antages of each scheme are compared.Fiber optic gy roscope is one of the m ost pr ominent com ponents utilized in intertial navigatio n system in recent y ears.T he sig nal-processing schem e is the key factor for the improvement of its perform ances.Keywords Fiber optic gy roscope;Sig nal pr ocessing Dai Xuhan w as ho rn in Nanping,Fujian in1974,receiv ed his B.S.deg reeat the depar tm ent of mechanical eng ineering fr om Yanshan Univ er sity andM.S.degree at the departm ent of m echanical eng ineer ing from ZhejiangUniver sity in1994and1997r espectively.Currently he is a doctor can-didate at the department o f optical engineering of Zhejiang U niversity.Hisresear ch is focused on fiber optic sensor and its sig nal processing method. 1048光 子 学 报28卷。
三轴光纤陀螺仪数据接收原理
三轴光纤陀螺仪数据接收原理主要包括以下步骤:
光路调整与配置:光纤陀螺仪中的光学环路是核心部分,当光束在一个环形的通道中前进时,如果环形通道本身具有一个转动速度,那么光线沿着通道转动的方向前进所需要的时间要比沿着这个通道
转动相反的方向前进所需要的时间要多。
这是塞格尼克理论的基本要点。
利用这种光程的变化,可以测量环路的转动速度。
信号处理:在光路调整的基础上,对不同方向上前进的光之间进行干涉,通过测量干涉产生的信号,可以得到环路的转动速度,即角速度。
数据接收与处理:接收到的信号经过一系列的信号处理,如放大、滤波、解调等,最终转换成可以读出的数据。
这些数据反映了陀螺仪的状态和姿态变化。
接口通信:通过数据接口,如串口、USB或网络接口等,将处理后的数据传输到上位机或其他设备进行进一步的分析和处理。
误差补偿与校正:由于各种因素的影响,如温度、压力、光学元件的误差等,都会对陀螺仪的测量结果产生影响。
因此,需要进行误差补偿和校正,以提高测量精度。
以上是三轴光纤陀螺仪数据接收的基本原理。
在实际应用中,还需要根据具体需求和场景进行相应的设计和优化。
光纤陀螺信号降噪的无监督自适应滤波方法
光纤陀螺信号降噪的无监督自适应滤波方法1 光纤陀螺信号的降噪问题光纤陀螺是一种高精度、高稳定性的旋转传感器,被广泛应用于工业、军事等领域。
然而,由于各种噪声的存在,光纤陀螺所产生的信号常常受到很大的干扰,降低其测量精度和可靠性。
因此,如何对光纤陀螺信号进行有效的降噪,一直是研究者关心的热点问题。
2 传统滤波方法存在的问题传统的光纤陀螺信号滤波方法主要包括数字滤波和模拟滤波两种。
数字滤波方法的优点是可以通过软件实现,易于控制和调节;模拟滤波方法的优点是可以在滤波器前端直接滤除噪声。
但是,这两种方法都存在一些不足之处,如数字滤波方法会引入额外的延迟和失真;模拟滤波方法需要对电路进行精细的调整,不易实现自动化。
3 无监督自适应滤波方法的优点为了解决传统滤波方法存在的问题,近年来,提出了一种新的光纤陀螺信号降噪方法——无监督自适应滤波方法。
该方法可以自动适应信号的变化,并根据信号的特征对其进行滤波,避免了传统滤波方法中需要手动调整参数的缺点。
此外,这种方法可以识别和能处理多信噪比环境下的信号,有很好的鲁棒性和适应性。
4 无监督自适应滤波方法的实现无监督自适应滤波方法的实现基于自适应算法,主要包括LMS(最小均方)算法、NLMS(归一化最小均方)算法、RLS(递归最小二乘)算法等。
其中LMS算法是最常见的一种,其基本思想是对待滤波信号和噪声信号分别自适应调整一组加权系数,以期望信号的平均误差最小。
5 结语综上所述,无监督自适应滤波方法是一种有效的光纤陀螺信号降噪方法,具有自动化、适应性、鲁棒性等优点。
在实际应用中,可以根据具体情况选择不同的自适应算法,并对算法参数进行合理调整,以达到最优的滤波效果。
光纤陀螺工艺技术

光纤陀螺工艺技术光纤陀螺是一种基于光学原理的传感器设备,主要用于测量和检测物体的旋转运动。
它具有高精度、快速响应和稳定性好等特点,在航空航天、导航控制、惯性导航等领域有着重要的应用。
光纤陀螺的工艺技术是实现其高精度和稳定性的关键。
下面介绍一下光纤陀螺的工艺技术。
首先是光纤的制备。
光纤陀螺是利用光纤的特殊传输特性来实现测量的,因此光纤的质量对陀螺的性能影响很大。
光纤的制备需要严格控制其材料的成分和工艺参数,确保其光学性能和机械稳定性符合要求。
目前常用的制备方法有拉制法和化学气相沉积法,不同的制备方法适用于不同的光纤材料。
其次是光纤的耦合和调制技术。
光纤陀螺需要将光信号输入到光纤中并经过光纤传输到检测器中进行测量,因此需要耦合器将激光器产生的光束与光纤耦合在一起,并根据需要调制光纤中的光信号。
耦合和调制技术的精度要求很高,需要精确控制光束的入射角度和位置,并通过材料和结构设计来优化光纤的传输特性。
再次是光纤陀螺的检测原理和信号处理技术。
光纤陀螺通过测量光纤中传输光束的相位差来实现对物体旋转运动的测量。
在光纤中传输的光束会受到惯性力的影响而产生相位差,通过检测相位差的变化可以计算出物体的旋转角度和角速度。
检测原理需要高精度的光学测量装置和精密的信号处理算法来提取出旋转运动的信号并进行分析。
最后是光纤陀螺的封装和保护技术。
光纤陀螺作为精密的光学设备,对环境的温度、压力和振动等条件都非常敏感。
为了保证陀螺的性能和寿命,需要将光纤陀螺封装在密封的外壳中,并采取各种保护措施来减小对外界环境的影响。
封装和保护技术需要综合考虑陀螺的机械结构、材料和工艺参数等因素,确保陀螺在恶劣环境下仍然正常工作。
综上所述,光纤陀螺的工艺技术是实现其高精度和稳定性的关键。
通过对光纤的制备、耦合和调制技术、检测原理和信号处理技术以及封装和保护技术的研究和应用,可以提升光纤陀螺的性能和可靠性,促进其在各个领域的应用。
随着光纤陀螺工艺技术的不断改进和创新,相信它将在更广泛的领域发挥重要作用。
干涉型光纤陀螺的信号处理稳定性
co e —o p .Th y t m p i z d i s e t fco k,p we o r e e e t o g e i o a i i t EM C), t . ls dlo s es s e i o t s mie a p c so lc n o rs u c , l c r ma n tcc mp t l y( b i ee Th e tr s lss o t a l t e e me h d r fe t e t e t an e t r a it r a c ,a d t e s se i s a l e t s e u t h w h ta l h s t o s a e e f c i O r s r i x e n l su b n e n h y tm s t b e v d a d rl be n e i l .Th t t e t g d t fI OG s a ay e y u i g t e me h d o ln v ra c .Th e u t s o a esai tsi aao F c n i n l z d b sn h t o f Al a in e a e r s l h ws
W ANG h i ,S e g ,HAO n i g ,J a g Liu UN F n Ya l lQin n
( . Co l g fAu o 1 le e o t ma i n.Ha b n En i e rn to r i g n e i g Un v r iy,H a b n 1 0 0 iest r i 5 0 1,Ch n ; ia
摘 要 : 号 处 理 在 数 字 闭 环 光 纤 陀 螺 (F ) 的 主 要 作 用 是 产 生 偏 置 相 位 及 用 于 补 偿 外 部 S g a 相 移 的 信 I OG 中 an c 阶梯 相位 , 输 出载 体 的转 速 , 字 闭 环 I O 信 号 处 理 的 稳 定 性 直 接 影 响 IOG 的 整 体 性 能 。 在 信 号 处 理 系统 并 数 F G F 中 , 述 数 字 闭 环 2次 反 馈 技术 , 四状 态 调制 波进 行 分 析 和 设计 , 对 时 钟 、 源 电磁 兼 容 ( 论 对 并 电 EMC) 电气 结 构进 等 行优 化 。测 试 结 果 表 明 ,F IOG 的 信 号 处 理 过 程 稳 定 可 靠 。采 用 Al n方 差 法 对 IOG静 态 测 试 数 据 中 的各 项 噪声 l a F 误差 进 行 定 量 分 析 。结 果 表 明 ,F IOG 的零 偏稳 定 性 优 于 0 0 ()h I O 动 态 测 试 数 据 表 明 IOG 的 标 度 因数 . 3 。/ ;F G F
光纤陀螺信号降噪的无监督自适应滤波方法
光纤陀螺信号降噪的无监督自适应滤波方法光纤陀螺信号降噪是提高光纤陀螺仪性能的重要问题之一、由于光纤陀螺信号是通过采集光强数据得到的,它受到各种噪声干扰的影响,如光源噪声、检测器噪声以及环境振动等。
这些噪声会对陀螺仪输出的精度和稳定性造成不利影响,因此需要采用降噪方法对信号进行处理。
对于光纤陀螺信号的降噪,常用的方法是滤波。
一般来说,滤波方法可以分为两类:有监督滤波和无监督滤波。
有监督滤波需要先提供已知的噪声模型或噪声测量值作为输入,然后通过模型或测量数据对信号进行滤波。
然而,在实际应用中,我们常常无法获得准确的噪声模型或测量数据。
而无监督滤波方法则不依赖已知的噪声模型或测量数据,而是通过对信号的统计特性进行估计和分析,从而实现信号的降噪。
一种常用的无监督自适应滤波方法是基于小波变换的降噪方法。
小波变换是一种时频分析方法,它具有良好的局域特性和多分辨率分析能力,适用于非平稳信号的处理。
在小波域中,信号分解成不同尺度的频带,并且可以对每个频带的系数进行调整和滤波。
因此,小波变换在信号降噪中具有较好的效果。
具体而言,基于小波变换的降噪方法的步骤如下:1.将光纤陀螺信号进行小波分解,得到信号的小波系数。
2.对小波系数进行阈值去噪。
阈值去噪是指对小波系数进行幅值的判断和处理。
可以使用硬阈值或软阈值来进行去噪。
硬阈值将小于给定阈值的系数置零,而软阈值将小于阈值的系数缩小到一个较小的值。
通过调整阈值的大小,可以控制信号的平滑程度和噪声的去除效果。
3.对去噪后的小波系数进行小波逆变换,得到降噪后的光纤陀螺信号。
需要注意的是,在选择小波基函数和确定阈值时需要考虑到信号的特性和噪声的统计特性。
不同的小波基函数对信号的处理效果不同,而适当选择阈值可以使得信号在去噪后尽可能保留原始信号的特征信息。
除了基于小波变换的降噪方法,还可以采用其他无监督自适应滤波方法,如自适应滤波器和自适应滤波算法等。
这些方法的原理类似,都是通过对信号的统计特性进行估计和分析,从而实现信号的降噪。
小波阈值滤波在光纤陀螺信号处理中的应用

( y La . fOp o e e to i c n 1 g Ke b o t — l c r n c Te h o o y& S s e ,M i s r fEd c to Ch n q n i e s t Cho gq n 0 0 0, y tm nit y o u a i n, o g i g Un v r iy, n ig 4 0 3 Chi a n)
u so h r o o f iin s b f r n fe i e i g wi o rc mmo i e e t h e h l— a u sv rf d t es p r— e ft ee r r e fce t eo e a d a t rfl rn t f u o c t h n d f r n r s o d— l e e ii h u e i f t v e —
va i use r r s ur e n FO G oie c n b bt i e y u i he A la a in e a he la ts a e fti g. I hi ro r o o c s i n s a e o a n d b sng t l n v ra c nd t e s qu r itn nt s pa r, v l tt r s ol— a u i e f t tc pe wa e e h e h d v l e fl r or s a i ou putsgn lof a c r an m od l t t i a e t i e wa a c m p ihe s co ls d, t q antt tve he u ia i
光纤陀螺原理

光纤陀螺原理
光纤陀螺是一种利用光纤作为传感器的陀螺仪,它利用光的干涉原理来测量角
速度,是一种高精度、高灵敏度的惯性导航仪器。
其原理基于光纤在旋转时会受到Sagnac效应的影响,从而实现了角速度的测量。
光纤陀螺的工作原理主要包括光路、干涉和信号处理三个方面。
首先,光纤陀
螺的光路是由光源、分束器、光纤环、合束器和探测器组成的。
光源发出的光经过分束器分为两路,一路顺时针流过光纤环,另一路逆时针流过光纤环,然后再通过合束器汇聚到探测器上。
当光纤环处于静止状态时,两路光程相等,合束器上的光信号干涉消光。
而当光纤环发生旋转时,由于Sagnac效应的存在,两路光程会产
生微小的差异,导致合束器上的光信号发生干涉,从而产生干涉信号。
其次,干涉信号的处理是光纤陀螺中至关重要的一环。
探测器接收到干涉信号后,会将其转换为电信号,并经过放大、滤波、数字化等处理,最终输出为角速度信号。
这些信号经过一系列的计算和处理后,可以准确地反映出光纤陀螺所受到的旋转角速度。
最后,光纤陀螺的原理还涉及到光的干涉现象。
当两路光程差为波长的整数倍时,两路光信号将完全相消,形成干涉消光;而当光程差为波长的奇数倍时,两路光信号将完全相长,形成干涉增光。
通过探测器对干涉信号的检测,可以准确地测量出光纤陀螺所受到的角速度。
总的来说,光纤陀螺利用了光的干涉原理,通过测量光纤环中光路的微小差异,实现了对角速度的高精度测量。
其原理简单而又精密,使得光纤陀螺在导航、航天、地震监测等领域有着广泛的应用前景。
随着科技的不断进步,相信光纤陀螺在未来会有更加广阔的发展空间。
光纤陀螺姿态系统信号处理方案
引 言 பைடு நூலகம்
光纤陀螺是一种不同于常规机 电陀螺的光 电式传感器 , 它没有机械活动部件 ,具有工艺简单、体积
小 、重量轻 、启动速 度 快 、灵敏度 高 、动态 范围 大 、抗 冲击和 耐过 载等 一系列 的优 异 性能 。在航 空、航
天、 航海等军用及地质、 石油勘探等 民J领域具有广阔的发展前景 , _ I = I 因此成为国内外研究的热点。目前, 在国 内单轴 光 纤陀螺 技术 已经 成熟 ,接近 实 用化 。在应 用中主 要是 作为 角速率传 感 器 但是 , 由于光纤
s h me i ic se .T i lt n r s l h w 血a o ae t e ta i o a u tr i n c e s ds u s d h smu a o e ut s o e ] s t c mp d wi t rd t n lq aeno r h h i ag rtm emeh dc ns o t eefc f os i e ovn es s m t td . lo i h t to a m o t fe t i whl rs ligt yt at u e h hh on e e h e i Ke r s Fie pia y o S g a p o e s g Attd g r m ywo d : b ro t l r ; in l r c si : c g n t u ea o t i l i h
中圈 分 类号 :2 1 V4. 5
关键词:光纤陀螺;信号处理 ;姿态算法 文献标 识 码 :A
A i n l o e sn c e ef rF b rOp i r tt d y t m S g a c s i g S h m i e t Gy oAtiu eS se Pr o c
光纤陀螺仪在导航系统中的精度提升

光纤陀螺仪在导航系统中的精度提升一、光纤陀螺仪概述光纤陀螺仪(Fiber Optic Gyroscope, FOG)是一种利用光波导原理工作的角速度传感器,它具有高精度、高可靠性、长寿命等优点,在现代导航系统中扮演着重要角色。
与传统的机械陀螺仪相比,光纤陀螺仪没有旋转部件,因此具有更高的稳定性和更低的维护成本。
1.1 光纤陀螺仪的工作原理光纤陀螺仪的工作原理基于萨格纳克效应(Sagnac Effect),即当光在闭合路径上传播时,由于存在角速度,逆时针和顺时针方向上的光速会有所不同。
通过测量两个方向上光程差,可以计算出角速度。
1.2 光纤陀螺仪的组成光纤陀螺仪主要由光源、光纤环、光电探测器、信号处理器等部分组成。
光源发出的光信号通过耦合器进入光纤环,光纤环的一端固定,另一端可以旋转。
当光纤环旋转时,逆时针和顺时针方向上的光信号会产生相位差,这个相位差由光电探测器检测,并转换为电信号,最后由信号处理器进行处理和分析。
1.3 光纤陀螺仪的优势光纤陀螺仪的优势主要体现在以下几个方面:- 高精度:由于光纤陀螺仪测量的是光的相位差,因此其测量精度非常高。
- 高稳定性:光纤陀螺仪没有机械旋转部件,因此不受机械磨损和振动的影响。
- 长寿命:由于光纤陀螺仪的稳定性和可靠性,其使用寿命非常长。
- 抗干扰能力强:光纤陀螺仪对电磁干扰和温度变化具有很好的抵抗能力。
二、光纤陀螺仪在导航系统中的应用光纤陀螺仪在导航系统中的应用非常广泛,包括航空、航天、航海、陆地车辆导航等领域。
在这些领域中,光纤陀螺仪主要用于提供高精度的角度信息,以实现精确导航。
2.1 航空导航系统在航空导航系统中,光纤陀螺仪可以提供飞机的姿态信息,包括俯仰角、滚转角等。
这些信息对于飞机的稳定飞行和精确导航至关重要。
2.2 航天导航系统在航天导航系统中,光纤陀螺仪可以用于测量卫星或航天器的姿态变化,为航天器的轨道控制和姿态调整提供重要数据。
2.3 海上导航系统在海上导航系统中,光纤陀螺仪可以为船舶提供准确的航向信息,帮助船舶在复杂的海洋环境中保持正确的航向。
光纤陀螺的原理及应用

光纤陀螺的原理及应用1. 引言光纤陀螺(Fiber Optic Gyroscope,简称FOG)是一种利用光学原理测量旋转的装置。
它通过光的干涉效应来感知旋转角速度,广泛应用于导航、航天、船舶、航空等领域。
本文将介绍光纤陀螺的工作原理和应用。
2. 光纤陀螺的工作原理光纤陀螺的工作原理基于Sagnac效应。
当光沿着一个闭合环路传播时,如果环路在一个平面内以某一速度旋转,光将会沿着环路两个方向分别传播一段距离,而在环路中会产生两束具有不同光程差的光。
当这两束光重新相遇时,它们会发生干涉。
根据Sagnac效应,干涉产生的结果与旋转角速度成正比。
通过测量干涉信号的相移,可以获得旋转角速度的信息。
3. 光纤陀螺的结构光纤陀螺一般由光纤环路、光源、探测器和信号处理器等部分组成。
光纤环路是光纤陀螺中最核心的部分,通常采用一个闭合的环路,光纤被环绕在其中。
环路一般通过一定的结构和材料来保持其稳定性和刚度。
光源发出一束光,经过分光器分成两束光,分别经过光纤环路的两个不同方向传播。
这里的光源一般采用激光器,因为激光的光线干涉效应最为显著。
探测器接收到光纤环路中两束光重新相遇后产生的干涉信号,并将其转化为电信号。
信号处理器对探测器接收到的电信号进行放大、滤波和数字化处理,然后通过算法获取旋转角速度的信息。
4. 光纤陀螺的优势相比传统的机械陀螺,光纤陀螺具有以下优势:•高精度: 光纤陀螺可以实现更高的精度,达到0.01度/小时甚至更高的级别。
•高灵敏度: 光纤陀螺可以感知更小的旋转角速度,对于微小运动的测量非常有优势。
•快速响应: 光纤陀螺的响应速度非常快,可以在毫秒甚至微秒级别对旋转进行测量。
•高可靠性: 光纤陀螺不需要机械部件,减少了零部件运动带来的磨损和故障风险。
•可扩展性: 光纤陀螺可以通过增加光纤环路的长度来提高精度和灵敏度。
5. 光纤陀螺的应用光纤陀螺在以下领域有广泛的应用:5.1 航天导航光纤陀螺被广泛用于航天器的姿态控制和导航系统。
光纤陀螺原理.
设想,当处理回路为闭环时,通过调节斜率 补偿旋转引起的相位差 ,使总的相位差 为零:
锯齿波复位高度 必须等于干涉仪的响应周期2πrad,否则这种复位会引起误差。
也即:
复位后, 由零变为 。
旋转速率的测量值变为:
闭环工作方案与实现
闭环工作的原始方案之一:利用频移——由声光调制器(AOM)也称为布喇格元件产生频移。事实上,萨格奈克效应可以用线圈分束器上的多普勒效应来解释,这样,位于线圈一端的频移器可以使萨格奈克效应的多普勒频移置零。
稳定性!
闭环工作方案与实现
原始方案二:模拟相位斜波——锯齿波调制 通过采用一个线性相位斜波,可以克服声光频移器的稳定性问题。 频率是相位的导数,运用一个相位调制器来代替频移器施加相位斜波调制 (其中 是斜率),等价于一个频移。 这种处理方案允许在零点附近正向或负向工作(与斜波斜率的符号关)。 实际上,锯齿波调制波形在复位时必须具有很快的回扫时间。它要求相位 调制器在很大的带宽内具有平坦的调制效率。
信号的偏置调制与解调
于是,干涉信号变为:
这种方法可以用一个方波调制来实现,即 ,其中方波的半周期等于τ, 从而产生一个 的偏置调制。
静止时,方波的两种调制态给出相同的信号:
旋转时,则有:
两种调制态之差变为:
信号的偏置调制与解调
闭环工作方案与实现
闭环工作方案与实现
数字相位斜波的产生: 数字寄存器容纳相位台阶的数字值DJ,其动态范围可以很大 (大于25位)。数字积分器产生阶梯斜波的数字值DR。一个 D/A转换器和一个缓冲放大器产生相位调制器的模拟驱动电压。 对于N位的D/A,可以在 的动态范围内把数字 量D转化为一个模拟电压,其中V是与最低有效位(LSB)对应 的驱动电压。 当DR大于 时,自动溢出产生的电压等于 。 如果调节调制通道的增益,使满足: 其中Vπ是产生πrad相移的电压,此时溢出自动地产生一个复位, 它等效于模拟斜波的2π复位,因而不会产生任何标度因数误差。 这种自动溢出可以采用一个相位斜波,也可以采用相位斜波 和方波调制的数字和。这允许Y分支的两个调制器采用推挽连接, 减少他们的整体非线性误差。
光纤陀螺仪的使用方法与误差分析
光纤陀螺仪的使用方法与误差分析一、光纤陀螺仪的使用方法1.安装:首先,将光纤陀螺仪的安装座固定在测试的物体上,座固定后将光源固定在陀螺仪的底座上。
然后,根据具体需要将光纤传感器固定到需要测量的物体上。
2.启动:打开陀螺仪的电源开关,等待一段时间,使陀螺仪内部的激光源和传感器达到稳定状态。
3.校准:在使用光纤陀螺仪之前,需要进行校准操作。
一般来说,可以在静止和已知角速度的条件下对光纤陀螺仪进行校准。
4.测量:校准完成后,可以开始进行测量。
陀螺仪会输出角速度和角位移的数据,并通过接口传输给外部设备进行处理和分析。
二、光纤陀螺仪的误差分析1.随机误差:随机误差主要是由外界干扰、光源和光纤传感器固有噪声等因素引起的。
为了减小随机误差,可以采取以下措施:-降低外界干扰:尽量避免将光纤陀螺仪安装在振动较大或温度波动较大的环境中。
-优化光源和光纤传感器设计:选择优质的光源和光纤传感器,以减小固有噪声。
-信号处理和滤波:合理选择适当的滤波算法对数据进行滤波处理,抑制噪声干扰。
2.系统误差:系统误差主要是由光纤陀螺仪本身的结构、材料和技术等因素引起的。
为减小系统误差,可以采取以下方法:-校准和调整:在使用前对光纤陀螺仪进行校准,并对其进行合适的调整和校验。
-增加纠正算法:通过分析系统误差的规律,可以建立相应的纠正算法,对测量结果进行修正。
总结:光纤陀螺仪的使用方法主要包括安装、启动、校准和测量。
在使用过程中,需要注意光纤陀螺仪的环境条件和校准操作。
光纤陀螺仪的误差主要有随机误差和系统误差,可以通过降低外界干扰、优化光源和传感器设计、信号处理和滤波等方法减小随机误差;通过校准和调整、增加纠正算法、结构优化等方法减小系统误差。
光纤陀螺的应用与技术研究

光纤陀螺的应用与技术研究随着现代技术的发展,光纤陀螺技术在导航系统、航空航天、海洋地球物理勘探、卫星通信等领域得到了广泛的应用。
光纤陀螺是一种利用光学原理测量角位移的惯性导航传感器,它拥有体积小、重量轻、响应速度快、准确性高等优点。
本文将分别从光纤陀螺概述、光纤陀螺工作原理、光纤陀螺的应用、光纤陀螺技术进展四个方面,详细阐述光纤陀螺技术的应用与技术研究。
一、光纤陀螺概述光纤陀螺是指利用光纤技术来检测陀螺仪转动的一种光学陀螺仪,是目前最先进的惯性导航传感器之一。
在高速移动的控制系统中,精准的角度传感器是十分关键的元件,而光学陀螺的优点在于,不受机械惯性的影响,可以获得高精确度的角度测量结果。
光纤陀螺作为一种高精度、高稳定的角速度传感器,包含了激光器、光路、探头、光电器件等部分,在不同领域有着广泛的应用。
二、光纤陀螺工作原理光纤陀螺的工作原理是利用光纤的光学特性来检测出转动角度,其基本构成包括光路系统和电路系统,光纤陀螺通过真空腔体结构,固定有一个转速极高的陀螺旋转体,这个旋转体上有一个大量绕行的光纤环,利用光纤自身的光学特点,通过反射、相位差和光纤束往返传输等方式,测量陀螺旋转体的角速度,实现精确定位和高精度角速度测量。
三、光纤陀螺的应用光纤陀螺的应用非常广泛,包括飞行器导航、导弹制导、漫游导航、无人车辆导航、地震勘探、探测船舶定位、卫星姿态控制、雷达探测、矿山勘探等。
其中,最具代表性的就是在民用、军用飞行器中使用,光纤陀螺提供了精确的飞行安全保障,解决了传统机械陀螺存在的短板。
四、光纤陀螺技术进展近年来,光纤陀螺技术的进展主要是在三个方面:一是开展更高精度、更高性能的光纤陀螺研究,二是开发更高效的光纤陀螺信号处理、运算和控制技术,三是探索应用场景,挖掘潜在的应用领域。
现代光纤陀螺技术的发展,不仅扩展了其应用范围,还在技术上实现了多中心的共性研究,满足了不同领域的需求。
综上所述,光纤陀螺技术的应用与技术研究发展迅速,并已在各种领域中得到了广泛的应用。
一种小体积的高精度光纤惯导陀螺信号处理系统[发明专利]
![一种小体积的高精度光纤惯导陀螺信号处理系统[发明专利]](https://img.taocdn.com/s3/m/e56a5a7cdd88d0d232d46a6c.png)
专利名称:一种小体积的高精度光纤惯导陀螺信号处理系统专利类型:发明专利
发明人:杨利民
申请号:CN201811643189.0
申请日:20181229
公开号:CN111380524A
公开日:
20200707
专利内容由知识产权出版社提供
摘要:本发明提供了一种小体积的高精度光纤惯导陀螺信号处理系统,包括光源、探测器、耦合器、集成光学芯片、光纤环、信号放大滤波器、信号驱动器以及高精度光纤陀螺信号处理芯片,所述光源通过耦合器连接所述集成光学芯片,所述集成光学芯片包括Y分束器,所述Y分束器的上光束按顺时针方向经过所述光纤环后返回所述集成光学芯片,所述Y分束器的下光束按逆时针方向经过所述光纤环后返回所述集成光学芯片;所述耦合器还连接有所述探测器,所述探测器连接所述信号放大滤波器,所述集成光学芯片连接所述信号驱动器,所述信号放大滤波器与所述信号驱动器分别连接所述高精度光纤陀螺信号处理芯片。
本发明实现了陀螺仪产品的小型化。
申请人:天津益华微电子有限公司
地址:300457 天津市滨海新区经济技术开发区新天地科技大厦B座414
国籍:CN
代理机构:天津滨海科纬知识产权代理有限公司
代理人:杨慧玲
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信号的偏置调制与解调
光强响应
I
检测光强信号
静止
旋转
t
− φb
0
φb
0
偏置调制
∆Φ
t
S
信号的偏置调制与解调
∆I (∆Φ S , φb ) = 2 I 0 sin φb sin ∆Φ s
用锁定放大器对探测器信号进行解调,可以测量这个“偏置”信 号∆Ι,当 φb = π 2 时有最大灵敏度,此时 sin φb = 1 。
R
S
• •
− 2π
•
φRS
0
∆φT
∆φT
0
t
φPR
φRS
t
0
t
闭环工作方案与实现
采用第二个处理回路,复位被精确地控制在2π上, 因此正、负复位的计数提供了旋转角的精确测量。 & & 由于 ∆φR = −φ ⋅τ ,斜率 φ 与旋转速率Ω成正比:
& = − 2πLD ⋅ Ω φ λcτ
这种模拟相位斜波反馈方案看起来很有吸引力,但 它需要很短的和非常稳定的回扫时间,才能得到很高的 标度因数稳定性和线性度。 一般地,10ppm的标度因数稳定性要求回扫时间小 于光纤环传输时间的1%(也即小于几十纳秒)。
闭环工作方案与实现
现用方案——数字相位斜波 利用数字方法很容易解决模拟相位斜波反馈的回扫问题。 “数字相位斜波”产生一个持续时间等于τ的相位台阶 φ J , 取代连续斜波。由于光纤环圈的延迟,数字相位斜波引起的相 位差 ∆φFB 为常数,且等于台阶高度。 这些相位台阶和复位可以与方波偏置调制同步:方波半周期 等于τ。 相位台阶的幅值 φ J 通过相位置零反馈回路来设置,与旋转 引起的萨格奈克相位差∆φS大小相等、符号相反: 这个 φ J 值给出的是旋转速率的线性读出值。
t t
0
−
π
2
t
信号的偏置调制与解调
偏置调制状态选择的依据: 偏置调制状态选择的依据: 最佳性能来自于最佳的信噪比;考虑理论光子噪声及探 测器热噪声,偏置工作点可以选在π 2 ~ 3π 4 之间,不会 削弱信噪比。 1
d
c b
a
0 0
π
2
Φf
3π 4
π
信号的偏置调制与解调
x
x4 x3 x1 x2
干涉式光纤陀螺基本原理
等价的概念: 环形干涉仪——光纤陀螺 光纤线圈 ——光纤环 相位调制器——Y波导(Y分支) 群传输时间——渡越时间 萨格奈克相位差——Sagnac ∆Φ S —— ∆φS
干涉式光纤陀螺基本原理
光纤陀螺基于萨格奈克(Sagnac)效应,即当 环形干涉仪旋转时,产生一个正比于旋转速率的相位 差。
光纤陀螺捷联惯导课题组专题研讨
光纤陀螺信号处理原理、 光纤陀螺信号处理原理、方案及实现
哈尔滨工程大学自动化学院 四零七教研室
研讨内容:
干涉式光纤陀螺基本原理简介; 信号的偏置调制与解调; 闭环工作方案与实现; 基于FPGA FPGA的信号处理及时序控制 基于FPGA的信号处理及时序控制 ; 信号处理电路板介绍; FPGA程序介绍。 FPGA程序介绍。
∆φT = ∆φS + ∆φPR = 0
也即:
& ∆φS = −φ ⋅τ
复位后, ∆φT 由零变为 φ RS 。
闭环工作方案与实现
复位误差 为简单起见,考虑干涉仪施加偏置后的正弦响应。 当 ∆φT = 0时信号为零,但在每个复位后的时间τ内,信号变为 sin φ RS 。 这种寄生信号可以作为一个方便的误差信号,用于在每个复位触发第二个 反馈回路,以检验相位调制器的调制效率。
f c (+ ∆f FB)
∆φ1
∆L AOM
∆φ 2
fc
2πf c ∆φe = ∆φ1 + ∆φ2 = ⋅ ∆LAOM c
稳定性!
闭环工作方案与实现
原始方案二:模拟相位斜波——锯齿波调制 通过采用一个线性相位斜波,可以克服声光频移器的稳定性问题。 频率是相位的导数,运用一个相位调制器来代替频移器施加相位斜波调制 & φPR (t ) = φ ⋅ t(其中 φ& 是斜率),等价于一个频移。 这种处理方案允许在零点附近正向或负向工作(与斜波斜率的符号关)。 实际上,锯齿波调制波形在复位时必须具有很快的回扫时间。它要求相位 调制器在很大的带宽内具有平坦的调制效率。
数字相位斜波技术优势: 数字相位斜波技术优势: 1. 在数字方案中,复位和台阶都与时钟时间τ同步。这样,通过在每次回 N 扫时触发第二个反馈回路,放宽了将2 VLSB 的值精确控制为2π的要求。 由于第二个反馈回路也与τ同步,因此不受方波调制的瞬态过程的干扰。 2. 尽管从2πrad到0.1μrad的分辨率之间实际的动态范围高达26位,但数字 相位斜波不需要位数很大的D/A转换器!(对D/A转换器的一般性能要 求是线性度误差小于一个LSB。) 3. 实时速率测量值是相位台阶 的数字值DJ,存储在数字逻辑电路的寄存 φJ 器中。用来驱动电路的时钟必须与光纤线圈的传输时间τ近似匹配,以 便于限制瞬时脉冲的宽度,但台阶值与τ没有直接关系。当τ变化时, 会轻微地改变选通的瞬时脉冲的宽度,而反馈台阶的值 保持不变。 φJ 利用数字斜波和一个稳定的电子时钟,标度因数基本上只与线圈几何长 度上的萨格奈克效应有关,而与折射率没有关系。 4. 数字斜波方法允许将动态范围很容易地扩展到几个条纹。存储在寄存器 中的相位台阶幅值可以对应着大于±πrad的相位,D/A转换器的溢出自 动把实际的相位调制范围限制在小于2π。
旋转时,则有:
I (∆ΦS ,φb ) = I0 [1+ cos(∆ΦS + φb )]
I (∆ΦS ,−φb ) = I 0 [1 + cos(∆ΦS − φb )]
两种调制态之差变为:
∆I (∆ΦS , φb ) = I 0 [cos(∆ΦS − φb ) − cos(∆ΦS + φb )] = 2I 0 sin φb sin ∆Φs
信号的偏置调制与解调
I (∆Φ S ) = I 0 [1 + cos ∆Φ S ]
dI =0 dΩ
I0
∆φS
I'
φb
dI) = I 0 [1 + cos(∆Φ S + φb )]
Φb必须和预定的灵敏度一样稳定!
信号的偏置调制与解调
“互易性偏置调制—解调”
x
5π 3 π − −π − 4 4
3 π 4
π
5 π 4
∆Φ
x1 x3 x2 x4 静止
x1 x3 x2 x4 旋转
t
∆Φ
τ
2
四状态——
π
4
t
闭环工作方案与实现
前面描述的调制—解调检测方案能够保持环形干涉仪的 互易性,因而可以得到很好的零偏性能。 当然,倘若高性能光纤陀螺仪必须有一个稳定的和低噪 声的零偏,它也同样需要在整个动态范围内而不仅仅在零 点附近具有好的精度。 重要的测量参数是旋转的积分角位移而不只是速率,任 何过去的误差都将影响未来的信息。这一约束意味着,在 任何速率上都需要一个精确的测量值(也即要有一个精确 的标度因数)。这就是说,干涉仪的固有响应是正弦 型的,而所需的陀螺仪速率响应信号应是线性的。 这个问题可以采用闭环信号处理方法来解决。
∆φ m = φ m (t ) − φ m (t − τ )
τ
φ m (t )
在光纤线圈的一端放置一个互易性相位调制器作为时延线,可完全克服相位 偏置的漂移问题。 由于互易性,两束干涉波受到完全相同的相位调制,但不同时,其时延等于 调制器和分束器之间的长、短光路的群传输时间之差τ。
信号的偏置调制与解调
闭环工作方案与实现
闭环工作方案与实现
采用第二个反馈回路控制调制幅值的全数字闭环方案原理图
信号输出 调 制 增 益 器 —Y Y A/D 转 换 器 器 D/A 转 换 器 器 FPGA
于是,干涉信号变为:
I (∆Φ S ) = I 0 [1 + cos(∆Φ S + φb )]
这种方法可以用一个方波调制来实现,即 φm = ± 从而产生一个 ∆φm = ±φb 的偏置调制。 静止时,方波的两种调制态给出相同的信号:
φb
2
,其中方波的半周期等于τ,
I (0,−φb ) = I (0, φb ) = I 0 (1 + cosφb )
I (∆Φ S ) = I 0 [1 + cos ∆Φ S ]
I
I0
− Ωπ
Ωπ
Ω
干涉式光纤陀螺基本原理
光源发出的光经过耦合器 后分为两束光,其中的一束光 进入电光相位调制器(Y波 导),经过Y波导的内部调节 后输出的两束光为满足光的相 干条件,这两束光在光纤环中 相向传播,感应外部的角速度 运动,在探测器处检测干涉信 号光强变化,经过光电信号处 理转换之后,形成闭环反馈电 压信号来调节Y波导,使Y波导 产生与外部Sagnac相移大小 相等方向相反的反馈相移,使 数字闭环光纤陀螺始终工作在 零点相移附近,在数据处理的 同时即可以获取外部的角速度 信息。
2 N VLSB = 2Vπ
其中Vπ是产生πrad相移的电压,此时溢出自动地产生一个复位, 它等效于模拟斜波的2π复位,因而不会产生任何标度因数误差。 这种自动溢出可以采用一个相位斜波,也可以采用相位斜波 和方波调制的数字和。这允许Y分支的两个调制器采用推挽连接, 减少他们的整体非线性误差。
闭环工作方案与实现
∆l
Ω
2πLD ∆l 2 At ⋅Ω ∆l = ⋅ Ω; δt = ; ∆Φ S = ω ⋅ δt ; ∆Φ S = c c λc
干涉式光纤陀螺基本原理
干涉型光纤陀螺(I FOG)就是一个光纤Sagnac 干涉型光纤陀螺(I-FOG)就是一个光纤Sagnac 干涉仪,它利用干涉测量技术把相位调制光转变为振 幅调制光;把光相位的直接测量变为光强度的测量, 从而较简单地测出Sagnac相位变化。 从而较简单地测出Sagnac相位变化。 光纤陀螺中Sagnac相位差的响应(光强I)为 ΔΦS的余弦函数: