第5章最小二乘法
机器视觉第5章 尺寸测量技术

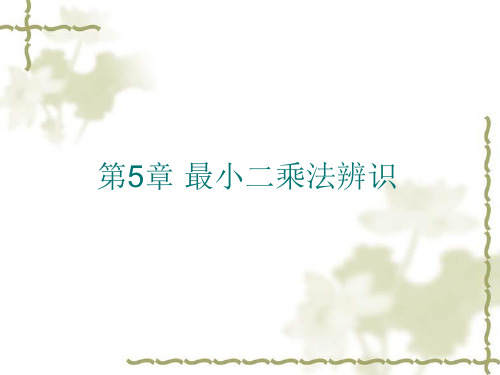
直线拟合的哈夫变换方法
直线函数:y=px+q
图像空间XY:(x, y) 参数空间PQ:(p, q)
Y (x2, y2)
(x1, y1)
O
X
Q
q=-x1p+y1
q’
q=-x2p+y2
O
p’
P
点--线对偶性:
图像空间中共线的点,对应在参
数空间中相交的线。
参数空间中相交于一点的所有直
Hough变换的基本思想:依次检查图像上的每个棋子(特定 像素)。对每个棋子,找到所有包含它的容器(直线),并 为每个容器的计数器加1。遍历结束后,统计每个容器 所包含的棋子数量。当图像上某个直线包含的特定像素 足够多时,就可以认为直线存在。
第5章 尺寸测量技术
L4
A L1
B L8
L6
L7
L2
L3
Hough变换时,依次对像素A、B进行处理
像素A的处理结果:L1、L2、L3、L4等直线的计数器加1; 像素B的处理结果:L2、L6、L7、L8等直线的计数器加1; 最终结果:除L2外,其余直线区域的计数器值均为1。
根据图像大小设定阈值T,规定若某个直线计数器内包含 的特定像素数量>T,则认为此直线存在。
第5章 尺寸测量技术
5.5 角度测量
在工业零件视觉检测的应用中,经常需要对工件中的一些 角度进行测量。
螺母正视图中每条边相互的夹角大小及是否相等 零件底面与侧面的垂直度检测
角度检测的关键是对所测角度的两条边线的提取,然后利 用斜率计算公式得到两条线的夹角。
可采用以上介绍的方法,得出两条直线方程
第5章 尺寸测量技术
Hough算法的改进
第五章 最小二乘法辨识
服从正态分
❖ 4)有效性
❖ 定理4:假设 (k) 是均值为零,方差为 2I 的正态
白噪声,则最小二乘参数估计量
^
是有效估计
量,即参数估计误差的协方差达到Cramer-Rao不
等式的下界
E (^
^
)(
)T
2E
(
T N
N
) 1
M 1
❖ 其中M为Fisher信息矩阵。
4、适应算法
❖ 随着更多观测数据的处理,递推最小二乘法对线性 定常系统的参数估计并非越来越精确,有时会发现
❖ 现举例说明最小二乘法的估计精度 ❖ 例5.1:设单输入-单输出系统的差分方程为
y(k) a1y(k 1) a2 y(k 2) b1u(k 1) b2u(k 2) (k)
❖ 设 u(k)是幅值为1的伪随机二位式序列,噪声 (k)是 一个方差 2可调的正态分布 N(0, 2 )随机序列。
❖ 为了克服数据饱和现象,可以用降低旧数据影响的 办法来修正算法。而对于时变系统,估计k时刻的 参数最好用k时刻附近的数据估计较准确。否则新 数据所带来的信息将被就数据所淹没。
❖ 几种算法:渐消记忆法,限定记忆法与振荡记忆法
❖ 矩阵求逆引理:设A为 n n 矩阵,B和C为 n m 矩阵,
并且A, A和 BCT I CT都A是1B 非奇异矩阵,则有矩
阵恒等式
A BCT 1 A1 A1B(I CT A1B)1CT A1
❖
令
A
PN1
,B
N 1
,C
T N 1
,根据引理有
PN1
T N 1 N 1
1
❖ 算法中,^ N 为2n+1个存贮单元(ai ,bi ,i 1,2, , n), 而 PN 是 (2n 1) (2n 1)维矩阵,显然,将 N 换成 PN 后,存贮量大为减少(因为n为模型的阶数,一般 远远小于N)
高中高三数学《最小二乘法》教案、教学设计
a.作业难度适中,既要涵盖基础知识的巩固,也要涉及一定程度的拓展和提高。
b.鼓励学生在完成作业过程中,积极思考、主动探究,培养解决问题的能力。
c.注重培养学生的数学表达和写作能力,要求学生在解题报告中清晰阐述思路和方法。
3.作业布置要求:
a.学生按时完成作业,保持字迹工整,书写规范。
3.介绍相关系数的概念和意义,通过实例讲解,让学生理解相关系数如何衡量两个变量之间的线性关系。
4.针对本节课的重点和难点,采用举例、讲解、练习等多种教学方法,帮助学生理解和掌握最小二乘法。
(三)学生小组讨论
1.将学生分成若干小组,每组选择一个实际问题,如身高与体重的关系、温度与用电量的关系等,运用最小二乘法进行分析。
b.鼓励学生在完成作业时,互相讨论、交流,共同解决问题。
c.教师在批改作业时,要关注学生的解题过程,及时发现学生的错误和薄弱环节,并进行针对性的指导。
4.作业评价:
a.作业评价以鼓励为主,关注学生的进步,提高学生的自信心。
b.对于学生在作业中表现出的创新思维和优秀成果,教师要给予充分肯定和表扬。
c.针对学生在作业中的共性问题,教师要及时进行讲解和辅导,确保学生掌握本节课的内容。
三、教学重难点和教学设想
(一)教学重难点
1.最小二乘法的推导及其在实际问题中的应用是本章节的教学重点。学生需要理解最小二乘法的原理,掌握其计算步骤,并能运用该方法解决实际问题。
2.相关系数的理解和计算是教学难点。学生对相关系数的概念及其在实际问题中的应用容易产生混淆,需要教师进行详细讲解和引导。
3.数学建模能力的培养是本章节的另一个重点。学生需要学会从实际问题中抽象出数学模型,运用最小二乘法求解,并分析结果。
最小二乘法抛物线拟合公式
最小二乘法抛物线拟合公式好的,以下是为您生成的文章:在咱们学习数学的这条“漫漫征途”上,有一个神秘而有趣的“家伙”叫做最小二乘法抛物线拟合公式。
这玩意儿听起来好像很复杂,让人摸不着头脑,但其实啊,它就像我们生活中的一把“万能钥匙”,能解决不少难题呢!我记得有一次,我带着学生们去做一个实验,测量一个物体下落的高度和时间。
大家兴致勃勃地拿着尺子和秒表,认真地记录着每一组数据。
可当数据摆在眼前的时候,大家都傻了眼,这一堆数字到底能说明啥呀?这时候,我就给他们引出了最小二乘法抛物线拟合公式。
咱们先来看看这个公式到底长啥样:对于一组数据(x₁, y₁),(x₂, y₂),...,(xₙ, yₙ),要拟合的抛物线方程为 y = ax² + bx + c ,那么最小二乘法就是要找到 a、b、c 使得∑(yₙ - (axₙ² + bxₙ + c))² 最小。
说起来有点绕,咱举个简单的例子。
比如说我们有这样五组数据(1,2),(2,5),(3,10),(4,17),(5,26)。
咱们要通过最小二乘法来找到最合适的抛物线。
首先,把这五组数据代入到抛物线方程里,就得到了五个方程:2 = a + b + c5 = 4a + 2b + c10 = 9a + 3b + c17 = 16a + 4b + c26 = 25a + 5b + c接下来就是解这个方程组啦。
这可不是一件轻松的事儿,得一步一步来,仔细计算,不能马虎。
经过一番“苦战”,咱们算出 a = 1,b = 0,c = 1 ,所以拟合出来的抛物线方程就是 y = x² + 1 。
这时候再回头看看咱们一开始的那些数据,是不是发现这个抛物线把这些点都“串”起来啦,就像串糖葫芦一样!最小二乘法抛物线拟合公式在实际生活中的应用可多啦!比如说在经济学中,预测商品的销售趋势;在物理学中,分析物体的运动轨迹;在工程学中,设计桥梁的拱形结构等等。
矩阵论-第五章-广义逆及最小二乘

第五章 广义逆及最小二乘解在应用上见得最频繁的、大约莫过于线性方程组了。
作一番调查或整理一批实验数据,常常归结为一个线性方程组:Ax b =然而是否是相容方程呢?倘若不是,又如何处理呢?最小二乘解是常见的一种处理方法。
其实它不过是最小二乘法的代数形式而已。
广义逆从1935年Moore 提出以后,未得响应。
据说: (S.L.Campbell & C.D.Meyer.Jr Generalized Inverses of Linear Transformations 1979 P9)原因之一,可能是他给出的定义,有点晦涩。
其后,1955年Penrose 给出了现在大都采用的定义以后,对广义逆的研究起了影响,三十年来,广义逆无论在理论还是应用上都有了巨大发展,一直成为了线性代数中不可缺少的内容之一。
为了讨论的顺利进行,我们在第一节中先给出点准备,作出矩阵的奇值分解。
§5.1 矩阵的酉交分解、满秩分解和奇值分解在线行空间中,知道一个线性变换在不同基偶下的矩阵表示是相抵的或等价的。
用矩阵的语言来说,就是:若 ,m n A B C ×∈,倘有非异矩阵()P m n ×,()Q n n ×存在,使B PAQ =则称A 与B 相抵的或等价的。
利用初等变换容易证明m n A C ×∈,秩为r ,则必有P ,Q ,使000r m nI PAQ C ×⎛⎞=∈⎜⎟⎝⎠(5.1-1) 其中r I 是r 阶单位阵。
在酉空间中,上面的说法,当然也成立,如果加上P ,Q 是酉交阵的要求,情形又如何呢?下面就来讨论这个问题。
定理 5.1.1 (酉交分解) m n A C ×∈,且秩为r ,则(),(),,H H m n U m n V n n U U I V V I ∃××==,使00r HU AV Δ⎛⎞=×⎜⎟⎝⎠(m n) (5.1-2) 其中r Δ为r 阶非异下三角阵。
第五章 线性参数最小二乘法处理(1)

光电效应
1 E = hν = m υ0 2 + A 2
1 eU 0 = m υ0 2 2
h A U0 = ν e e
2
光电效应
频率νi(×1014Hz) 8.214 7.408 6.879 5.490 5.196 截止电压U0i(V) 1.790 1.436 1.242 0.688 0.560
3
光电效应
SLOPE函数
频率ν i(Hz) 8.214E+14 7.408E+14 6.879E+14 5.490E+14 5.196E+14 截止电压U0i(V) 1.790E+00 1.436E+00 1.242E+00 6.880E-01 5.600E-01
4.02964E-15
2.000E+00 1.800E+00 1.600E+00
1
i 2
e
i 2 ( 2 i 2 )
di
( i 1, 2,
, n)
由概率论可知,各测量数据同时出现在相应区域的概率
为ቤተ መጻሕፍቲ ባይዱ
P Pi
i 1
n
1
1 2 n
2
e n
i 1
n
i 2 (2 i 2 )
d 1d 2
d n
12
第一节 最小二乘原理
1.400E+00
y = 4E-15x - 1.5314
1.200E+00 1.000E+00 8.000E-01 6.000E-01
4.000E-01
2.000E-01 0.000E+00 0.000E+00 5.000E+14 1.000E+15
线性参数的最小二乘法处理

W1、 +1″, +10″, +1″, +12″,
W2、 +6″, +4″,
W3、
W4„
Wn
+2″ , -3″ , +4″ +12″, +4″ +3″, +4″
+12″, +12″, +12″
W12
2
12
W22
2 2
W32
32
最小值
3
即 ∑(PW2)=(P1W21)+(P2W22)+(P3W32)
的测量结果 yi 最接近真值,最为可靠,即: yi=∠i+Wi 由于改正数 Wi 的二次方之和为最小,因此称为最小二乘法。 二 最小二乘法理 现在我们来证明一下,最小二乘法和概率论中最大似然方法(算术平均值方法) 是一致的。 (一)等精度测量时 (1)最大似然方法 设 x1,x2„xn 为某量 x 的等精度测量列,且服从正态分布,现以最大似然法和最小 二乘法分别求其最或是值(未知量的最佳估计量) 在概率论的大数定律与中心极限定理那一章我们讲过,随着测量次数的增加,测 量值的算术平均值也稳定于一个常数,即
2 i 1
n
曾给出: vi2
i 1
n
n n 1 n 2 ,由此可知 x vi2 / i2 为最小,这就是最小二乘法的基本 i n i 1 i 1
含义。引入权的符号 P ,最小二乘法可以写成下列形式:
Pv
i 1
n
2 i i
最小
在等精度测量中, 1 2 ... , P1 P2 ... Pn 即: 最小二乘法可以写成下列形式:
第五章-异方差性-答案说课讲解
第五章-异方差性-答案第五章 异方差性一、判断题1. 在异方差的情况下,通常预测失效。
( T )2. 当模型存在异方差时,普通最小二乘法是有偏的。
( F )3. 存在异方差时,可以用广义差分法进行补救。
(F )4. 存在异方差时,普通最小二乘法会低估参数估计量的方差。
(F )5. 如果回归模型遗漏一个重要变量,则OLS 残差必定表现出明显的趋势。
( T )二、单项选择题1.Goldfeld-Quandt 方法用于检验( A )A.异方差性B.自相关性C.随机解释变量D.多重共线性2.在异方差性情况下,常用的估计方法是( D )A.一阶差分法B.广义差分法C.工具变量法D.加权最小二乘法3.White 检验方法主要用于检验( A )A.异方差性B.自相关性C.随机解释变量D.多重共线性4.下列哪种方法不是检验异方差的方法( D )A.戈德菲尔特——匡特检验B.怀特检验C.戈里瑟检验D.方差膨胀因子检验5.加权最小二乘法克服异方差的主要原理是通过赋予不同观测点以不同的权数,从而提高估计精度,即( B )A.重视大误差的作用,轻视小误差的作用B.重视小误差的作用,轻视大误差的作用C.重视小误差和大误差的作用D.轻视小误差和大误差的作用6.如果戈里瑟检验表明,普通最小二乘估计结果的残差与有显著的形式的相关关系(满足线性模型的全部经典假设),则用加权最小二乘法估计模型参数时,权数应为( B )A. B. C. D. 7.设回归模型为,其中()2i2i x u Var σ=,则b 的最有效估计量为( D )i e i x i i i v x e +=28715.0i v i x 21i x i x 1ix 1i i i u bx y +=A. B. C. D. ∑=i i x y n 1b ˆ 8.容易产生异方差的数据是( C )A. 时间序列数据B.平均数据C.横截面数据D.年度数据9.假设回归模型为i i i u X Y ++=βα,其中()2i 2i X u Var σ=,则使用加权最小二乘法估计模型时,应将模型变换为( C )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(5-37) 这正是不等精度测量时加权算术平均值原理所给出的结果。
对于等精度测量有
则由最小二乘法所确定的估计量为
此式与等精度测量时算术平均值原理给出的结果相同。 由此可见,最小二乘法原理与算术平均值原理
是一致的,算术平均值原理可以看做是最小二乘 法原理的特例。
第三节 精度估计
用矩阵表示的正规方程与等精度测量情况类似,可表示为
即
(5-27)
上述正规方程又可写成 (5-28)
该方程的解,即参数的最小二乘法处理为 (5-29)
令
则有
(5-30)
例5—2
• 某测量过程有误差方程式及相应的标准差如下:
试求x1,x2的最小二乘法处理正规方程的解。 解: (1)首先确定各式的权
(2)用表格计算给出正规方程常数项和系数
三、线性参数最小二乘法的正规方程
为了获得更可取的结果,测量次数n总要多于未 知参数的数目t,即所得误差方程式的数目总是要 多于未知数的数目。因而直接用一般解代数方程 的方法是无法求解这些未知参数的。
最小二乘法则可以将误差方程转化为有确定解 的代数方程组(其方程式数目正好等于未知数的个 数),从而可求解出这些未知参数。这个有确定解 的代数方程组称为最小二乘法估计的正规方程(或 称为法方程)。
将ti,li,值代人上式,可得残余误差为
(二)不等精度测量数据的精度估计
不等精度测量数据的精度估计与等精度测量数据的精 度估计相似,只是公式中的残余误差平方和变为加权的 残余误差平方和,测量数据的单位权方差的无偏估计为
(5-44) 通常习惯写成
测量数据的单位权标准差为
(5-45)
(5-46)
二、最小二乘估计量的精度估计
1.线性参数的最小二乘法处理的基 本程序
线性参数的最小二乘法处理程序可归结为: (1)根据具体问题列出误差方程式; (2)按最小二乘法原理,利用求极值的方法将误差方程 转化为正规方程; (3)求解正规方程,得到待求的估计量; (4)给出精度估计。 对于非线性参数,可先将其线性化,然后按上述线性参 数的最小二乘法处理程序去处理。
建立正规方程是待求参数最小二乘法处 理的基本环节。
2.等精度测量的线性参数最小二乘法处理
的正规方程
线性参数的误差方程式为 最小二乘法处理的正规方程为
这是一个t元线性方 程组.当其系数行 列式不为零时,有 唯一确定的解,由 此可解得欲求的估
计量
(5-19)
线性参数正规方程的矩阵形式
正规方程(5—19)组,还可表示成如下形式
最小二乘法也可使用。
设X和Y两个物理量之间的函数关系为
假定此函数关系f已知,但其中a1,a2,…,ak等 参数还未求出,现对于X和Y有一批观测数据:
{xi,yi} ,i=1,2,…,n,要利用这批数据 在一定法则之下作出这些参数a1,a2,…,ak的估 计。
一般根据测量的实际情况,可假设变量X的测量没有误 差(或与Y的误差相比很小,可略去),而变量Y的测量有 误差,故关于Y的观测值yi可以写成
最大似然法要求上式取极大值,这就相当于要求指 数项中的
=最小 这就说明了在观测值服从正态分布的条件下,最 小二乘估计与最大似然估计是一致的。
观测值不服从正态分布时的最小二乘估计
实质上,按最小二乘条件给出最终结果能充分 地利用误差的抵偿作用,可以有效地减小随机误 差的影响,因而所得结果具有最可信赖性。
(3)求出待求估计量 求解正规方程解得待求估计量
即
由正规方程,有
按矩阵形式解算
则
所以
(4)给出实验结果 铜棒长度yt随温度t的线性变化规律为
3.不等精度测量的线性参数最小二乘法处理的 正规方程
• 不等精度测量时线性参数的误差方程仍如上述式 (5—9)一样,但在进行最小二乘法处理时,要取加权残 余误差平方和为最小,即
• 最小二乘法的产生是为了解决从一组测量 值中寻求最可信赖值的问题。
一、问题背景
• 在测量的实验数据处理中,经常需要根据两个 量的一批观测数据(xi,yi),i=1,2,…,n求出这 两个变量Y与X之间所满足的一个函数关系式Y= f(X)。
• 若变量间的函数形式根据理论分析或以往的经 验已经确定好了,而其中有一些参数是未知的, 则可通过观测的数据来确定这些参数;
(2)解是观测值的线性组合,且有最小方差。这称为高 斯—马尔可夫定理; (3) 加权的残差平方和的期望值是
当σ2=1,即取wi=1/σi2,这时称
为χ2 量。期望值为n-k。
第二节 线性参数的最小二乘法
一般情况下,最小二乘法可以用于线性参数 的处理,也可用于非线性参数的处理。由于测 量的实际问题中大量的是属于线性的,而非线 性参数借助于级数展开的方法可以在某一区域 近似地化成线性的形式。
二、最小二乘法准则与正规方程
在参数估计问题中,最小二乘法的法则是: 所选取的参数估计值aˆ1 ,aˆ2 ,…,aˆk 应使变量Y的诸观测 值yi与其真值的估计值(又叫拟合值),即f(xi;a1,a2,…ak) 之差的平方和为最小。 用式子表示时,记残差νi为
最小二乘法就是要求
=最小 在这个条件下,利用数学中求极值的方法可以求出 参数 aˆ1 ,aˆ2 ,…,aˆk 。这样求出的参数叫参数的最小 二乘估计。
• 若变量间的具体函数形式尚未确定,则需要通 过观测数据来确定函数形式及其中的参数。
一、问题背景
• 在多数估计和曲线拟合的问题中,不论是参 数估计还是曲线拟合,都要求确定某些(或一个) 未知量,使得所确定的未知量能最好地适应所 测得的一组观测值,即对观测值提供一个好的 拟合。
• 解决这类问题最常用的方法就是最小二乘法。 • 在一些情况下,即使函数值不是随机变量,
对测量数据最小二乘法处理的最终结果, 不仅要给出待求量的最可信赖的估计量,而 且还要确定其可信赖程度,即应给出所得估 计量的精度。
一、测量数据的精度估计
为了确定最小二乘估计量X1,X2,…,Xt的 精度,首先需要给出直接测量所得测量数据的 精度。测量数据的精度也以标准差σ来表示。因 为无法求得σ的真值,因而只能依ˆ 据有限ˆ次的测 量结果给出σ的估计值 ,所谓给出精度估计, 实际上是求出估计值 。
例5—1
在不同温度下,测定铜棒的长度如下表,试估计0℃时 的铜棒长度y0和铜的线膨胀系数α。
解: (1)列出误差方程
式中, li——在温度ti下铜棒长度的测得值; α——铜的线膨胀系数。
令y0=a,αy0=b为两个待估计参量,则误差方程可写为
(2) 列出正规方程
为计算方便,将数据列表如下:
将表中计算出的相应系数值代人上面的正规方程得
最小二乘法的几何意义
从几何图形上可看出,最小二乘法就是要在穿过各 观测点(xi,yi)之间找出这样一条估计曲线,使各观测 点到该曲线的距离的平方和为最小。
Y
X
三、最小二乘法与最大似然法的关系
如果假定各观测值是相互独立且服从正态分布, 期望值是μ(xi;a1,a2,…,ak),方差是σi2, 则观测值的似然函数为
n
前面已证明
2 i
/
2
是自由度为(n-t)的χ2变量。
i 1
根据χ2变量的性质,有
(5-39) 取
(5-40) 可以证明它是σ2的无偏估计量
因为
习惯上,式5-40的这个估计量也写成σ2,即 (5-41)
因而测量数据的标准差的估计量为 (5-43)
例5.3
• 试求例5.1中铜棒长度的测量精度。 已知残余误差方程为
这里y0i表示xi对于的Y的变量真值,△i表示相应的测量 误差。
假设诸观测值相互独立且服从正态分布。在等精度观测的 情况下,即认为各误差服从相同的正态分布N(0, σy)。
现在的问题是一个参数估计问题:需要给出a1,a2,…, ak的估计值 , aˆ1 aˆ2 ,…,aˆk 。
解决这类问题最常用的方法就是最小二乘法。在一些情况 下,即使函数值不是随机变量,最小二乘法也可使用。
最小二乘法所确定的估计量X1,X2,…,Xt的 精度取决于测量数据的精度和线性方程组所给出 的函数关系。对给定的线性方程组,若已知测量 数据l1,l2,…,ln的精度,就可求得最小二乘估 计量的精度。
下面首先讨论等精度测量时最小二乘估计量的精度估计。 设有正规方程
现要给出由此方程所确定的估计量xl,x2,…,xt 的精度。为此,利用不定乘数法求出xl,x2,…,xt 的表达式,然后再找出估计量xl,x2,…,xt的精度 与测量数据l1,l2,…,ln精度的关系,即可得到估计 量精度估计的表达式。
假若观测值不服从正态分布,则最小二乘估计 并不是最大似然估计。但应该指出,在有些问题 中观测值虽然不服从正态分布,但当样本容量很 大时,似然函数也趋近于正态分布,因此,这时 使用最小二乘法和最大似然法实质也是一致的。
不服从正态分布时最小二乘法的统计学性质
若观测值是服从正态分布的,这时最小二乘法和最大似 然法实际上是一回事。但观测值不服从正态分布或其分布 未知时,这时用最小二乘法显得缺乏理论的验证。但应该 指出,作为一种公理来使用,最小二乘法仍然是可以接受 的,而且可以证明,所得到的估计仍然具有一些很好的统 计性质,这些性质是: (1)解是无偏的,即
表示成矩阵形式为
线性参数正规方程的矩阵形式
又因
(5-21)
有 即 若令 则正规方程又可写成 若矩阵C是满秩的,则有
(5-22)
(5-22) (5-23)
Xˆ 的数学期望
因 可见 Xˆ 是X的无偏估计。
式中Y、X为列向量(n ×1阶矩阵和t×l阶矩阵)
其中矩阵元素Y1,Y2,…,Yn为直接量的真值,而 Xl,X2,…,Xn为待求量的真值。
(3)给出正规方程 (4)求解正规方程组
解得最小二乘法处理结果为