Bettis阀门气动控制原理图和开关方式
SDV BDV的基本原理

以上为关断阀SDV的工作原理,放空阀工作原理则相反, 进气关闭,排气打开。
7
2.3 现场执行机构的基本组成
执行机构正面图
执行机构背面图
手动3通阀 示位器 快速泄压阀 手动3通阀
气源分配机构
磁性开关 减压阀 旁通阀 电磁控制阀 气源进口 排气口 旁通阀
8
2.3 主要特点
上图所示的气动控制系统最核心的部分在于气源压力不是直接通过3 通电磁阀进入汽缸的,3通电磁阀在系统中得电时主要是为快速泄 气阀提供动力气源,使快速泄气阀中的机构动作从而打开阀门内 进气气源通道,使仪表气进入汽缸,SDV正常开。3通电磁阀失电 时,排气使快速泄压阀内部机构反方向运动,从而导通阀门内排 气气源通道,使汽缸气体从快速泄压阀排气口排出,SDV关闭。
20
4.2 现场SDV和BDV最大的区别
注意:SVD每次关断以后中控恢复必须现场手动复位
才能打开,BDV只要中控恢复送电后马上自动关闭。
SDV电磁阀(有 复位拉柄)
BDV电磁阀(无 复位拉柄)
复位拉柄
21
谢谢!!! 祝工作安全,顺利
!!!
CEP-INST 09-08
22
排气喷嘴
17
2.7 BDV-1303的故障处理
BDV-1303在没有收到中控任何打开信号自动打开到一定 位置的状态的故障分析:
经过现场检查,3通电磁阀工作正常,所有外部附件均无漏气现象,重 新打开BDV后又正常关闭,BDV功能正常,观察通过减压阀的气源 压力为6.9bar.经过分析,外部无泄漏现象,阀门自动开到中间位置 后不动原因是由于整个气源压力瞬间变化导致。如果当时外部进气源 压力波动导致弹簧突然推动活塞朝阀门开启方向运动,当弹簧压力与 当时活塞缸进气压力平衡时执行机构停在中间位置,阀门也就处于中 间位置。我们到TWT仪表风压力最大也就不超过7BAR 中间如果波动 造成仪表风管路整体压力变小,就完全有可能导致上述情况,解决方 法根据阀门开启压力要求我们把减压阀压力调到5.9BAR这样的压力 再怎么波动也不可能低于这个值。经过调整以后最近3个月都没有再 出现过阀门自动打开的现象。
BETTIS执行机构运行原理及使用方法

缸壁磨损 密封损坏
Valve Automation
[File Name or Event] Emerson Confidential 27-Jun-01, Slide 15 Company Confidential 8-Mar-18 / Slide 15
现场应用及维护
不纯净仪表风损害:不纯净的仪表风会将大量的风尘颗粒,及水分带入气缸。造成气缸内部涂层及密封 受损,气缸内部窜气。这对于控制阀是严重的损害。建议定期对过滤减压阀进行清 理,开关频次较多的执行机构最少一年一次对气缸内部进行润滑处理。
[File Name or Event] Emerson Confidential 27-Jun-01, Slide 12 Company Confidential 8-Mar-18 / Slide 12
5 现场应用及维护
• 通常情况下,该系列执行机构推荐服务间隔为5年。并请严格按 • 照压力要求使用执行机构。维护维修时,应熟知操控文件。并切断一起切动力源。 警告:执行机构中可能流通危险气体和/或液体,应当在进行任何工作之前,确保采取足够的预防措 施,为防止这些有害物质意外泄露或渗漏。 :当弹簧处于压缩状态时请勿拆卸弹簧模块。 :由于弹簧是有预载的且弹簧筒为焊接结构,所以在任何情况下都不能强行拆分弹簧筒。 小心:如果不遵守,用户将损坏执行器,或者造成人员伤害。 注意:提供建议和信息帮助给助理检修人员进行检修操作。 环境及动力源: BETTIS执行机构是适应全天候使用的,但要求动力源纯净,如果环境粉尘较多,控制系统应 采用闭路循环设计。 超压使用对于执行机构是致命的。请严格按照执行机构铭牌信息设置压力范围。 请按照工艺要求和技术参数合理选择BETTIS执行机构。
阀门定位器原理与调节

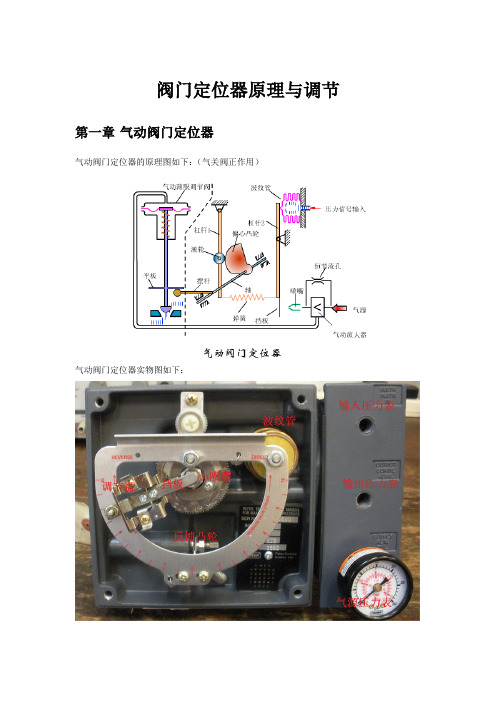
阀门定位器原理与调节第一章气动阀门定位器气动阀门定位器的原理图如下:(气关阀正作用)气动阀门定位器实物图如下:气动阀门定位器是按力平衡原理设计工作的,其工作原理方框见上图所示,它是按力平衡原理设计和工作的。
如图上图所示当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。
此时,一定的信号压力就与一定的阀门位置相对应。
以上作用方式为正作用,若要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。
所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。
要改变正反作用,Fisher的阀只需要把里面的调节盘拨到另一侧即可。
一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。
至于气开阀,由于是在膜盒下面通气,需要将如图中的凸轮反转。
第二章电气阀门定位器由于现在DCS在现场使用越来越多,很多控制器都是使用了中控系统的控制器,所以中控到现场的都是4-20mA的电信号,到现场又需要阀动作的比较快。
虽然阀门定位器由最初的气/气阀门定位器、电/气阀门定位器发展到现在的数字阀门定位器、区域总线阀门定位器,但它们的基本原理和主要功能都没有大的改变。
定位器中基本自控元件介绍--电/气转换器原理随着仪表技术的发展,气动仪表领域已逐步被电动仪表和计算机控制所占领,现在只有在一些特殊的场合还在使用气动仪表,作为仪表中的阀门附件“定位器”也由原来的气动阀门(P/P)定位器逐步由电/气(E/P)阀门定位器所代替。
阀门定位器原理与调节
阀门定位器原理与调节第一章气动阀门定位器气动阀门定位器的原理图如下:(气关阀正作用)气动阀门定位器实物图如下:气动阀门定位器是按力平衡原理设计工作的,其工作原理方框见上图所示,它是按力平衡原理设计和工作的。
如图上图所示当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。
此时,一定的信号压力就与一定的阀门位置相对应。
以上作用方式为正作用,若要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。
所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。
要改变正反作用,Fisher的阀只需要把里面的调节盘拨到另一侧即可。
一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。
至于气开阀,由于是在膜盒下面通气,需要将如图中的凸轮反转。
第二章电气阀门定位器由于现在DCS在现场使用越来越多,很多控制器都是使用了中控系统的控制器,所以中控到现场的都是4-20mA的电信号,到现场又需要阀动作的比较快。
虽然阀门定位器由最初的气/气阀门定位器、电/气阀门定位器发展到现在的数字阀门定位器、区域总线阀门定位器,但它们的基本原理和主要功能都没有大的改变。
定位器中基本自控元件介绍--电/气转换器原理随着仪表技术的发展,气动仪表领域已逐步被电动仪表和计算机控制所占领,现在只有在一些特殊的场合还在使用气动仪表,作为仪表中的阀门附件“定位器”也由原来的气动阀门(P/P)定位器逐步由电/气(E/P)阀门定位器所代替。
气动执行机构(BETTIS)操作维护手册--117761050

所有温度的服务(-50F到+350F)/(-45.5C 到+176.6C)都使用BETTIS ESL-5 润滑剂。ESL-5 润滑剂在BETTIS 备件包的软管中保存。软管上会标注有ELS-4,5&10 号润滑剂。
3.3用于M11液压手轮的液压油
有温度的服务(-50F到+350F)/(-45.5C 到+176.6C)都使用 DEXRON 自动化传动液。
12-MSS或ISO执行机构/阀接口;
13-排气口;
14-压力槽;
15-双向行程限位;
16-内部双连杆。
2
1、执行机构手轮;2、电磁阀;3、电磁阀;4、过滤减压装置;5、限位开关;6、继电器;7、排气阀;8、测试开关;10、速度控制开关;11、电磁阀。
图1-2-3 ESDV阀门执行机构工作原理图
2.2 ESDV阀门执行机构控制
2.2.1 现场手动开关
通过执行机构配套的手轮(或液压手轮)装置选择手动/气动,逆时针旋转手轮,通过液压装置可以现场打开阀门;顺时针旋转手轮,通过液压装置可以现场关闭阀门;手轮处于中间位置时,执行机构处于远程气动状态,通过站控(中控)系统能够远程控制打开(或关闭)阀门。
2.2.2 远程自动操作
正常工作状态下,ESD电磁阀(冗余)励磁,由于该电磁阀为NC,励磁时电磁阀导通,导致ESD先导阀(冗余)导通(与ESD电磁阀相连的),压缩空气进入气缸,压缩弹簧,执行机构动作,阀门打开。当发生紧急情况时,ESD电磁阀(冗余)失电,电磁阀断开,导致先导阀(冗余)断开(与ESD电磁阀相连的),执行机构气缸内的压缩空气通过该先导阀释放,弹簧复位,阀门关闭。
3.4用于M2,M4,M7及M9手轮系统使用的液压油
标准温度及高温(-20F--+350F)/(-28.9C--+176.6C) 使用DEXRON 自动化传动液;低温服务(-40F-+150F)/(-40C-65.6C) 使用EXXON UNIVIS J13 液压油。
气动阀门执行器的控制方式及工作原理【范本模板】
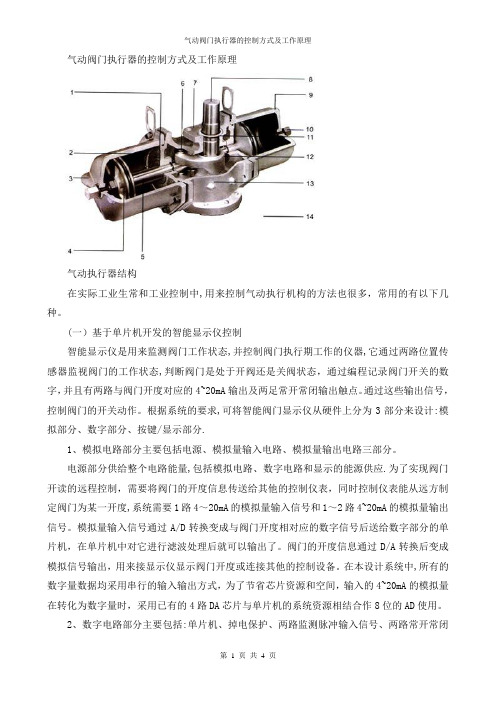
气动阀门执行器的控制方式及工作原理气动执行器结构在实际工业生常和工业控制中,用来控制气动执行机构的方法也很多,常用的有以下几种。
(一)基于单片机开发的智能显示仪控制智能显示仪是用来监测阀门工作状态,并控制阀门执行期工作的仪器,它通过两路位置传感器监视阀门的工作状态,判断阀门是处于开阀还是关阀状态,通过编程记录阀门开关的数字,并且有两路与阀门开度对应的4~20mA输出及两足常开常闭输出触点。
通过这些输出信号,控制阀门的开关动作。
根据系统的要求,可将智能阀门显示仪从硬件上分为3部分来设计:模拟部分、数字部分、按键/显示部分.1、模拟电路部分主要包括电源、模拟量输入电路、模拟量输出电路三部分。
电源部分供给整个电路能量,包括模拟电路、数字电路和显示的能源供应.为了实现阀门开读的远程控制,需要将阀门的开度信息传送给其他的控制仪表,同时控制仪表能从远方制定阀门为某一开度,系统需要1路4~20mA的模拟量输入信号和1~2路4~20mA的模拟量输出信号。
模拟量输入信号通过A/D转换变成与阀门开度相对应的数字信号后送给数字部分的单片机,在单片机中对它进行滤波处理后就可以输出了。
阀门的开度信息通过D/A转换后变成模拟信号输出,用来接显示仪显示阀门开度或连接其他的控制设备。
在本设计系统中,所有的数字量数据均采用串行的输入输出方式,为了节省芯片资源和空间,输入的4~20mA的模拟量在转化为数字量时,采用已有的4路DA芯片与单片机的系统资源相结合作8位的AD使用。
2、数字电路部分主要包括:单片机、掉电保护、两路监测脉冲输入信号、两路常开常闭转换触点输出。
在设计方案中选用目前普遍使用的51系列单片机AT89C4051。
AT89C4051是一款低电压、高性能的CMOS8位微控制器,它具有4K字节的可擦除、可重复编程的只读闪存.通过在单芯片内复合一个多功能的8位CPU闪存,在性能、指令设定和引脚上与80C51和80C52完全兼容.考虑到在系统掉电或重新启动时,需要保持先前在仪表中设置的一些阀门参数,而单片机中的数据存储器不具备掉电存储功能,所以在片外扩展了一个具有掉电保存功能的芯片X5045。
(完整word版)气动保位阀工作原理
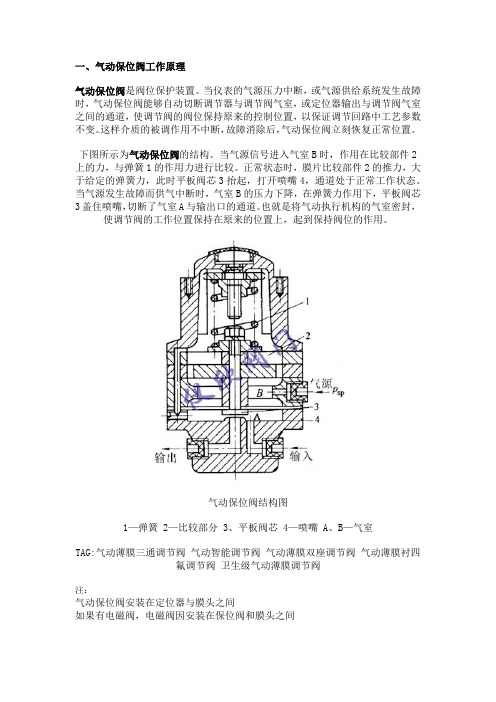
气动保位阀是阀位保护装置。
当仪表的气源压力中断,或气源供给系统发生故障时,气动保位阀能够自动切断调节器与调节阀气室,或定位器输出与调节阀气室之间的通道,使调节阀的阀位保持原来的控制位置,以保证调节回路中工艺参数不变。
这样介质的被调作用不中断,故障消除后,气动保位阀立刻恢复正常位置。
下图所示为气动保位阀的结构。
当气源信号进入气室B时,作用在比较部件2上的力,与弹簧1的作用力进行比较。
正常状态时,膜片比较部件2的推力,大于给定的弹簧力,此时平板阀芯3抬起,打开喷嘴4,通道处于正常工作状态。
当气源发生故障而供气中断时,气室B的压力下降,在弹簧力作用下,平板阀芯3盖住喷嘴,切断了气室A与输出口的通道。
也就是将气动执行机构的气室密封,使调节阀的工作位置保持在原来的位置上,起到保持阀位的作用。
气动保位阀结构图1—弹簧 2—比较部分 3、平板阀芯 4—喷嘴 A、B—气室TAG:气动薄膜三通调节阀气动智能调节阀气动薄膜双座调节阀气动薄膜衬四氟调节阀卫生级气动薄膜调节阀注:气动保位阀安装在定位器与膜头之间如果有电磁阀,电磁阀因安装在保位阀和膜头之间气动继动器本质上是一种气动放大器。
它与气动薄膜式或气动活塞式执行机构配套使用,用以提高气动执行机构的动作速度。
当仪表远距离传送压力信号,或执行机构气室的容量很大时,由于将产生较明显的传递时间滞后,因此,使用这种附件能显著提高执行机构的响应特性。
下面所示为一种典型的气动继动器的结构。
它是以力平衡原理工作的。
当由调节器或阀门定位器来的控制信号压力输入到气室A时,在膜组件1上产生一个向下的推力,膜片组件1向下转动,打开阀芯2。
此时,气源压力由阀芯、阀座之间的间隙,流人到反馈气室B,同时经由输出端被送到执行机构。
当膜片的上下两侧所产生的作用力相平稀时,输入信号与输出信号将保持一定的比例关系。
如果设P为信号压力,膜片组件1 上膜片的有效面积为A1,下膜片的有效面移为A2,输出压力为Pout,则有下列的平衡关系成立:气动继电器结构1—膜片组建 2—阀芯 3—针形阀PA1=PoutA2式中,面积A1、A2均为常数。
气动阀原理和操作介绍

气动阀的基本知识
气动阀门的基本概念 所谓气动阀通常指阀门的闭合或调节功能是 由压缩空气产生的控制力来实现的.其特点是反 应迅速;阀位准确,经常被用在阀门口径比较 小,系统要求开关速度较快的现场位置. 1.“安全位置”的概念 气动阀门在气动头尚未进气或气动头卸压后自 动回复的稳定位置被称为该阀的“安全位置”。 2.“失气关”和“失气开”的概念 “失气开”-气动阀在气动头没有进气的时 候,阀门在弹簧的作用下完全开启。当气动头充 气后在隔膜上产生的作用力压缩弹簧使阀门关闭 (如图1-1a);
气动阀的基本知识
典型手轮的分类 --SEREG气动截止阀: 直接式手轮:手轮杆和阀杆在一条轴线 上,手轮在阀体的正上方; 间接式手轮:是指手轮的转动扭矩通过 一副蜗轮装置将手轮扭矩传递给阀杆,手 轮杆和阀杆不在一条轴线上. --气动调节阀 顶部手轮;側置蜗轮组手轮;杠杆式手轮
图1-7 SEREG气动截止阀的手轮形式
气动截止阀
图2-8 设计中性点位置的轴系图
气动截止阀
“中性点”勺尺是怎么做出来的? 以失气关/直接式手轮的气动截止阀轴系图为例 维修人员在每次解体检修阀门后期都要重新标定勺尺高度,该 工作在阀门组装完成后,品质再鉴定之前执行。内容有测量数 据;总体计算,气动检查和机加工4个步骤 1.测量数据 首先检查各联接紧固部件是否牢固可靠; *摇手轮使手轮杆滑块在气动杆导套中至下止位。测量锁紧器 到手轮轴下表面的距离记为H;(此时阀门为关闭状态) *反向摇手轮使手轮杆滑块在气动杆导套中至上止位。测量锁 紧器到手轮轴下表面的距离记为H1;(阀门仍为关闭状态)
气动截止阀
手轮操作任务完成后,现场操作人员一定要把手动机构回置到 “中性点”上,否则阀门将无法气动操作.确定无误后将手轮杆锁 紧.
气动执行机构(BETTIS)操作维护手册

第二章气动执行机构(BETTIS)操作维护手册(一)BETTIS气动执行机构(ESDV阀)1 设备简介图1-2-1 ESDV阀门执行机构实际安装图图1-2-2 ESDV阀执行机构结构图1- 压力锁紧机构;2- Powr-swivl 活塞杆;3- Acculine 轴传动装置;4- NAMIR ;5- 可更换轴承;6- 推力轴套导向块;7- 共轭滚针推杆;8- 过载控制装置;9- 弹簧组件;10- 吊环;11- 环环紧扣;12- MSS 或ISO 执行机构/阀接口;13- 排气口;14- 压力槽;15- 双向行程限位;16- 内部双连杆。
2 使用操作方法1、执行机构手轮;2、电磁阀;3、电磁阀;4、过滤减压装置;5、限位开关;6、继电器;7、排气阀;8、测试开关;10、速度控制开关;11、电磁阀。
11 ♦●❍ ⏹ ☐ ❑☐图1-2-3 ESDV阀门执行机构工作原理图2.2 ESDV阀门执行机构控制2.2.1 现场手动开关手轮通过执行机构配套的手轮(或液压手轮)装置选择手动/气动,逆时针旋转手轮,通过液压装置可以现场打开阀门;顺时针旋转手轮,通过液压装置可以现场关闭阀门;手轮处于中间位置时,执行机构处于远程气动状态,通过站控(中控)系统能够远程控制打开(或关闭)阀门。
2.2.2 远程自动操作正常工作状态下,ESD电磁阀(冗余)励磁,由于该电磁阀为NC,励磁时电磁阀导通,导致ESD先导阀(冗余)导通(与ESD电磁阀相连的),压缩空气进入气缸,压缩弹簧,执行机构动作,阀门打开。
当发生紧急情况时,ESD电磁阀(冗余)失电,电磁阀断开,导致先导阀(冗余)断开(与ESD电磁阀相连的),执行机构气缸内的压缩空气通过该先导阀释放,弹簧复位,阀门关闭。
2.2.3 部分冲程测试正常工作状态下,部分冲程测试电磁阀不带电,该电磁阀为NO,失电时电磁阀导通,导致先导阀导通(与部分冲程测试电磁阀相连的),此时气源接通,阀门正常工作。
气动执行机构(BETTIS)操作维护手册
第二章气动执行机构(BETTIS)操作维护手册(一)BETTIS气动执行机构(ESDV阀)1 设备简介图1-2-1 ESDV阀门执行机构实际安装图图1-2-2 ESDV阀执行机构结构图1- 压力锁紧机构;2- Powr-swivl 活塞杆;3- Acculine 轴传动装置;4- NAMIR ;5- 可更换轴承;6- 推力轴套导向块;7- 共轭滚针推杆;8- 过载控制装置;9- 弹簧组件;10- 吊环;11- 环环紧扣;12- MSS 或ISO 执行机构/阀接口;13- 排气口;14- 压力槽;15- 双向行程限位;16- 内部双连杆。
2 使用操作方法1、执行机构手轮;2、电磁阀;3、电磁阀;4、过滤减压装置;5、限位开关;6、继电器;7、排气阀;8、测试开关;10、速度控制开关;11、电磁阀。
11 ♦●❍ ⏹ ☐ ❑☐图1-2-3 ESDV阀门执行机构工作原理图2.2 ESDV阀门执行机构控制2.2.1 现场手动开关手轮通过执行机构配套的手轮(或液压手轮)装置选择手动/气动,逆时针旋转手轮,通过液压装置可以现场打开阀门;顺时针旋转手轮,通过液压装置可以现场关闭阀门;手轮处于中间位置时,执行机构处于远程气动状态,通过站控(中控)系统能够远程控制打开(或关闭)阀门。
2.2.2 远程自动操作正常工作状态下,ESD电磁阀(冗余)励磁,由于该电磁阀为NC,励磁时电磁阀导通,导致ESD先导阀(冗余)导通(与ESD电磁阀相连的),压缩空气进入气缸,压缩弹簧,执行机构动作,阀门打开。
当发生紧急情况时,ESD电磁阀(冗余)失电,电磁阀断开,导致先导阀(冗余)断开(与ESD电磁阀相连的),执行机构气缸内的压缩空气通过该先导阀释放,弹簧复位,阀门关闭。
2.2.3 部分冲程测试正常工作状态下,部分冲程测试电磁阀不带电,该电磁阀为NO,失电时电磁阀导通,导致先导阀导通(与部分冲程测试电磁阀相连的),此时气源接通,阀门正常工作。
气动阀的工作原理及操作方法课件

• 安全可靠:气动阀将更加注重安全可靠性能。采用耐高温、耐腐蚀、防火防爆 等高性能材料,能够提高气动阀的使用寿命和安全性。同时加强安全附件的配 置,如安全阀、紧急切断阀等,提高系统的安全性。
气动阀的结构与组成
结构
气动阀主要由阀体、阀芯、驱动装置、定位器等组成。
组成
阀体是气动阀的主体,内部有流道和密封面;阀芯是控制流体流动的关键部件 ,可上下或左右移动;驱动装置是气压驱动的执行机构;定位器则是控制阀芯 位置的装置。
气动阀的工作原理简介
工作原理
通过输入气压来驱动阀芯运动,从而控制流体的通 断或流量。当输入气压增大时,阀芯向下运动,流 体通道打开,流体流量增加;反之,当输入气压减 小时,阀芯向上运动,流体通道关闭,流体流量减 少。
气动阀的工作原理及操作方法课件
目录
• 气动阀概述 • 气动阀的控制系统 • 气动阀的操作方法 • 气动阀的故障诊断与排除 • 气动阀的应用案例及发展方向
01
气动阀概述
Chapter
气动阀的定义与分类
定义
气动阀是一种通过气压驱动的开 关或调节装置,用于控制气体或 液体管道的通断或流量。
分类
根据用途和结构,气动阀可分为 多种类型,如直行程气动阀、角 行程气动阀、调节型气动阀等。
控制方式
可以通过手动、电动、气动等方式来控制气动阀的 工作。其中,手动控制需要人工操作,电动控制需 要电源和电动执行器,气动控制则需要气压源和气 动执行器。
02
气动阀的控制系统
Chapter
控制系统的组成及工作原理
BETTIS气动执行机构

STEP 5 将加长扳手插入到“弹簧模块”内, 并咬合住“弹簧张力杆”. 将“弹簧张力杆”从 “导向滑块” 上松开
“G” S.R. Conversion from “CW” to “CCW”
STEP 6
将“弹簧模块”外壳上 的六角螺栓卸掉 顶部有2~4个 底部有2~4个
“G” S.R. Conversion from “CW” to “CCW”
然后卸掉气源压力
STEP 4
给动力模块外侧(呼吸阀)加载20 psig (最大)的气源压力 确保凹在“弹簧模块”内的“Tension Lok” 螺母 位于 自由位置(DISENGAGED)
“G” S.R. Conversion from “CW” to “CCW”
“G” S.R. Conversion from “CW” to “CCW”
注意: THROUGH TIE BAR DESIGN IS PICTURED. NEW DESIGN FOR G2 & G3 MODELS ARE SAME AS G4 thru G13’s. NO TIE BAR NUTS USED ON INBOARD END.
注意
“延长杆”紧固在 “导向滑块”上
“G” S.R. Conversion from “CW” to “CCW”
然后卸掉气源压力
STEP 8 给“ 动力模块” 的内侧加载 20 psig (最大)的气源压力, 把“ 活塞/活塞杆”推至 “ 动力模块” 的外侧
“G” S.R. Conversion from “CW” to “CCW”
注意 弹簧模块必须做保护措施 防止意外脱落 STEP 18 安装六角螺栓使 “弹簧模块”紧固 到“动力模块”上
《伯马球阀技术培训》课件
鼓励听众继续深入学习伯马球阀相关的知识和技术,并展望未来的发展方向。
详细解释伯马球阀的构造和 工作原理,以及其在流体控 制中的作用。
伯马球阀的结构
主要材料和部件
介绍伯马球阀常用的材料和各个部件的功能。
不同类型的伯马球阀
概述不同类型的伯马球阀,包括全通径球阀和减径 球阀等。
伯马球阀的工作原理
开关操作流程
解释伯马球阀的开关操作步骤,以及如何控制流体的通断。
如何选择适当的伯马球阀
《伯马球阀技术培训》 PPT课件
欢迎参加《伯马球阀技术培训》!本课程将通过详细讲解伯马球阀的结构、 工作原理和应用领域,帮助您更好地理解和运用该技术。
概述
什么是伯马球阀?
介绍伯马球阀的定义和基本 原理。
伯马球阀的优点和应用 范围
探讨伯马球阀相比其他阀门 的优势,并介绍其广泛应用 的领域。
伯马球阀的结构和工作 原理
提供选择适合特定应用的伯马球阀的指导原则和注意事项。
伯马球阀的应用实例
石油和天然气行业
介绍伯马球阀在石油和天然气开采、输送和加工中的关键应用。
化工行业
讲解伯马球阀在化工流程控制、液体分离和调节中的重要作用。
电力行业
探索伯马球阀在发电站和电力输变电系统中的应用,包括燃煤电厂和核电站。
伯马球阀的保养和维修
1
常见问题和故障排除
列出伯马球阀常见的故障情况,并提供解决方法和排除故障的技巧。
2
维护和保养技巧
分享保养伯马球阀的实用技巧,延长其使用寿命,并确保其性能和安全性。
总结
伯马球阀的优点和应用前景
总结伯马球阀的优点和潜在应用前景,包括行业趋势和新兴领域。
气动球阀工作原理图解
气动球阀工作原理图解气动球阀是一种常用的控制阀门,它通过气动执行器来实现阀门的开关控制。
下面我们将通过图解的方式来详细介绍气动球阀的工作原理。
首先,我们来看一下气动球阀的结构。
气动球阀由阀体、阀盖、球体、阀杆、气动执行器等部件组成。
阀体内部有一个球形阀芯,当阀芯旋转时,可以实现阀门的开关控制。
气动执行器则通过压缩空气的力量来驱动阀杆的运动,从而实现对阀门的控制。
接下来,我们来看一下气动球阀的工作原理。
当气动执行器接收到控制信号后,会通过气源将压缩空气送入气动执行器内部。
气动执行器内部的活塞会受到气压的作用而运动,进而带动阀杆的运动。
阀杆与球体连接,当阀杆运动时,球体也会跟随着旋转,从而实现阀门的开关控制。
在气动球阀的工作过程中,气动执行器起到了至关重要的作用。
它能够将外部的控制信号转化为气压力量,通过这种力量来驱动阀门的运动。
这种方式不仅能够实现远程控制,还能够实现快速的开关动作,提高了阀门的控制效率。
此外,气动球阀还具有结构简单、维护方便、使用寿命长等优点。
它适用于各种介质的控制,包括液体、气体等。
在工业生产中,气动球阀被广泛应用于管道控制系统、化工设备、石油化工、电力、冶金等行业。
总的来说,气动球阀通过气动执行器的力量来实现阀门的开关控制,具有结构简单、控制效率高、维护方便等优点。
它在工业生产中扮演着重要的角色,为各种介质的控制提供了便利和高效的解决方案。
通过以上的图解和解释,相信大家对气动球阀的工作原理有了更深入的了解。
希望本文能够对大家有所帮助,谢谢阅读!。
BETTIS阀门工作原理及维护

Slide 5
I
n
d
e x
Features & Benefits - Compact Design
内部双连杆
气动模块内部备有2个高强度合金钢连杆,这样内部连杆可避免腐蚀 和物理破坏,同时也可在缸腔内固定活塞的中心位置,以防止活塞与 缸壁金属间直接摩擦。
BETTIS应用范围
G系列双作用型产生的额定输出扭矩12581~6000000lbin(1420~6778000Nm).弹簧复位产生的弹力扭矩超过3000000lb(33900Nm)。G系列执行机构可长期工作于气压40-2000PSIG,液压 最高为5000PSIG的环境下。G系列的标准温度范围为-29至93摄氏度。
Powr SwivlTM----最新工艺水平
Replaceable Bearings--- 可 替 换 轴 承
Xylan ----高效抗磨防腐涂层
Inboard Spring----由弹簧拉杆压缩 的弹簧系统(内向受压)
这种增强设计极大的提高了效率 ,降低了磨损并延长了执行机构的使 用寿命。
通过这些技术的组合,增强设计 及出色的质量控制技术产生了一个被 我们称为核心产品的G 系列执行机构 .
Sales Training Course – G-Series Actuators – 1.03
Slide 7
I n d
Features & Benefits - Versatility &
e x
Efficient Modular Inventory
多样性
– 动力模块和弹簧模块可以方便的进行互换, 使得失气安全的模式可以 快速改变,同时还提供手动操作装置,附件及其他模块。
Bettis阀门气动控制原理图和开关方式
G-系列弹簧行程,内向受压
1.内置式的液压手动操作装置(液压手轮),并不增加单作用执行机构的 总长度。 2.液压手动操作装置装在动力模块的反方向,这样就可以清楚的将动力气 源和液压源分隔开。
G-系列单作用执行机构的弹簧内向受压设计,与传统的外向受压 弹簧设计相比有以下优势
1.“拉力”杆有“拉力“,可防止弹簧扭曲 2.更安全 –没有弹簧力作用在弹簧模块的外侧端盖上 3.弹簧重心 (COG) 与阀杆重心更接近,为整个执行机构提供了 更小的振动阻尼.
Bettis阀门气动控制原理图和开 关方式
易熔塞
电磁阀(手动复位) 电磁阀
三通先导阀
排气控制阀(控 制关阀速度)
过滤调节器,压力 设定为600kPa
流量控制阀(控 制开阀速度)
动力气源(空气), 压力大约为0.7MPa
操作手轮
限位开关(阀门定位器) 液压手动操作装置
活塞机构
弹簧机构(带液压手动操 作装置)
二、开关方式
1.从控制原则来讲,该气动阀的开关方式为得气开,失气关。 反映到气路控制,具体为相关电磁阀得电,开阀气路导通;失电, 关阀气路导通。
2.从设备结构方面来讲为顺时针旋进开,逆时针旋出关。
主要维护点: 1、气源:应洁净、干燥; 2、减压阀:减压后压力值稳定在执行器运行允许压力范围; 3、电磁阀:定期保养测试,防止污染、粘连、卡阻; 4、阀位反馈:保持阀位反馈正确; 5、执行器本体:传动部件润滑、执行器本体无锈蚀;
BETTIS执行机构运行原理及使用方法 PPT

注意:提供建议和信息帮助给助理检修人员进行检修操作。
环境及动力源:
BETTIS执行机构是适应全天候使用的,但要求动力源纯净,如果环境粉尘较多,控制系统应
采用闭路循环设计。
超压使用对于执行机构是致命的。请严格按照执行机构铭牌信息设置压力范围。
请按照工艺要求和技术参数合理选择BETTIS执行机构。
5 现场应用及维护
缸壁磨损 密封损坏
现场应用及维护
不纯净仪表风损害:不纯净的仪表风会将大量的风尘颗粒,及水分带入气缸。造成气缸内部涂层及密封 受损,气缸内部窜气。这对于控制阀是严重的损害。建议定期对过滤减压阀进行清 理,开关频次较多的执行机构最少一年一次对气缸内部进行润滑处理。
仪表风含水 过多,造成 内部结冰
仪表风杂质 造成内壁
置原始设置。 维护保养:定期清理更换气缸内部润滑。检查限位开关位置。建议一年一次。或从监测数据中发现进行维护保养。
定期排放过滤器内部杂质,保证动力源纯净。视工厂动力源纯净程度定制检查日期。 定期检查压力设置,防止超压使用。建议以周为单位。 对于环境较差的工艺线,呼吸阀应有防尘措施。 定期对执行机构连接螺丝进行检查。以确保没有松动或损坏。 定期检查执行机构呼吸阀工作是否正常 要求客户在压力运行范围内选择较低压力下使用驱动器。在工艺要求允许的情况下,选择最慢的循环时间。较 慢的速度导致较低的冲击载荷和较低的工作压力导致较低的组件损坏。从而延长执行机构的使用寿命。 寻求专业技术人员给您提供支持 BETTIS专业维修包提供密封件及润滑脂,以备客户维修使用。是用来替换密封和聚合物轴承等软部件。 G系 列维修包部件包括:螺栓、杆伸出部件、轭架、轭销、气缸、活塞、活塞杆、分环、挡圈、系杆、系杆螺母和 止动螺钉。并建议每两年进行一次部件维修
气动阀工作原理示意图
气动阀工作原理示意图气动阀是一种利用气压来控制流体流动的设备,它在工业自动化控制系统中起着至关重要的作用。
了解气动阀的工作原理对于工程师和技术人员来说是非常重要的,因此本文将通过示意图的形式来详细介绍气动阀的工作原理。
首先,我们来看一下气动阀的结构示意图。
气动阀通常由阀体、阀盖、阀芯、气缸、气动执行器等部件组成。
阀体是气动阀的主体部分,它负责连接管道并承受流体的压力。
阀盖则用来固定阀芯和密封阀体。
阀芯是气动阀的控制部分,它通过气动执行器的作用来控制流体的通断。
气缸则是气动阀的动力来源,它将气压转化为机械力,从而使阀芯实现开关动作。
接下来,我们来看一下气动阀的工作原理示意图。
当气动执行器接收到控制信号时,气缸内的气压将推动活塞向前运动,从而使阀芯打开,流体得以通过。
相反,当气动执行器接收到关闭信号时,气缸内的气压将减小,活塞向后运动,阀芯关闭,流体停止通过。
这样,通过对气动执行器施加不同的控制信号,就可以实现对流体的精确控制。
此外,气动阀通常还配备有定位器和手动装置。
定位器可以根据输入的控制信号来调整气动执行器的位置,从而实现对阀芯位置的精确控制。
手动装置则是为了在紧急情况下手动操作阀芯,以确保系统的安全运行。
总的来说,气动阀通过气动执行器将气压转化为机械力,从而实现对流体的控制。
通过合理的控制信号和配套设备,可以实现对流体的精确控制,从而满足工业自动化系统对流体控制的各种需求。
通过以上的介绍,相信大家对气动阀的工作原理有了更加深入的了解。
气动阀作为工业自动化控制系统中的重要组成部分,其工作原理的掌握对于工程师和技术人员来说是非常重要的。
希望本文所提供的示意图和介绍能够对大家有所帮助,谢谢阅读!。
BURKERT宝德角座阀的选型问题你了解多少
BURKERT宝德角座阀的选型问题你了解多少BURKERT宝德角座阀的选型问题你了解多少BURKERT宝德角座阀能顺当运转,关键就在于方面上的气动执行器,也叫气动头,气动头靠气缸吸入空气为动力,带着阀杆阀板运动。
气动执行器的工作原理(气动蝶阀气缸原理)AT系列气动执行器是双活塞齿条与齿轮转动构造设计,分为双作用与单作用(弹簧复位),适用于户外或户内各种非腐蚀性环境。
BURKERT宝德角座阀双作用气动执行器工作原理图双作用气动头:通气翻开,通气关闭。
双作用气动执行器多见于活塞式气缸,在失去气源时。
阀门可处于保位(FL)状态。
单作用气动执行器工作原理图当气源压力从气进入气缸两活塞之间中腔时,使两活塞别离向气缸两端方向挪动,迫使两端的弹簧紧缩,两端气腔的空气经过气口。
BURKERT宝德角座阀出,同时使两活塞齿条同步带动输出轴(齿轮)逆时针方向旋转。
在气源压力经过电磁阀换向后,气缸的两活塞在弹簧的弹力下向中心方向挪动,中心气腔的空气从气口排出,同时使两活塞齿条同步带动输出轴(齿轮)顺时针方向旋转。
BURKERT宝德角座阀只能作全开和全关,不能作调整和节流。
闸板有两个密封面,较常用的模式闸板阀的两个密封面形成楔形、楔形角随阀门参数而异,通常为5,介质温度不高时为252'。
楔式液控手动排泥阀的闸板可以做成一个整体,叫做刚性闸板;也可以做成能产生微量变形的闸板,以改良其工艺性,弥补密封面角度在加工过程中产生的偏差,这种闸板叫做弹性闸板。
BURKERT宝德角座阀关闭时,密封面可以只依靠介质压力来密封,即依靠介质压力将闸板的密封面压向另一侧的阀座来保证密封面的密封,这就是自密封。
大部分液控手动排泥阀是接受强制密封的,即阀门关闭时,要依靠外力强行将闸板压向阀座,以保证密封面的密封性。
BURKERT宝德角座阀的闸板随阀杆一起作直线运动的,叫升降杆液控手动排泥阀,亦叫明杆液控手动排泥阀。
通常在升降杆上有梯形螺纹,通过阀门顶部的螺母以及阀体上的导槽,将旋运转动变为直线运动,也就是将操作转矩变为操作推力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
G-系列弹簧行程,内向受压
1.内置式的液压手动操作装置(液压手轮),并不增加单作用执行机构的 总长度。 2.液压手动操作装置装在动力模块的反方向,这样就可以清楚的将动力气 源和液压源分隔开。
G-系列单作用执行机构的弹簧是内向受压设计,与传统的外向受压 弹簧设计相比有以下优势
1.“拉力”杆有“拉力“,可防止弹簧扭曲 2.更安全 –没有弹簧力作用在弹簧模块的外侧端盖上 3.弹簧重心 (COG) 与阀杆重心更接近,为整个执行机构提供了 更小的振动阻尼.
Bettis阀门气动控制原理图和开 关方式
易熔塞
电磁阀(手动复位) 电磁阀
三通先导阀
排气控制阀(控 制关阀速度)
过滤调节器,压力 设定为600kPa
Hale Waihona Puke 流量控制阀(控 制开阀速度)
动力气源(空气), 压力大约为0.7MPa
操作手轮
限位开关(阀门定位器) 液压手动操作装置
活塞机构
弹簧机构(带液压手动操 作装置)
二、开关方式
1.从控制原则来讲,该气动阀的开关方式为得气开,失气关。 反映到气路控制,具体为相关电磁阀得电,开阀气路导通;失电, 关阀气路导通。
2.从设备结构方面来讲为顺时针旋进开,逆时针旋出关。
主要维护点: 1、气源:应洁净、干燥; 2、减压阀:减压后压力值稳定在执行器运行允许压力范围; 3、电磁阀:定期保养测试,防止污染、粘连、卡阻; 4、阀位反馈:保持阀位反馈正确; 5、执行器本体:传动部件润滑、执行器本体无锈蚀;