STM32F107+ULN2003+步进电机
步进电机驱动原理及应用程序
∙ULN2003步进电机驱动原理及应用程序∙发布时间:2011-5-9 10:38:11 | 来源: 第一价值网| 查看: 1191次| 收藏| 打印TAG:ULN2003 步进电机驱动 ULN2003原理 ULN2003应用程序步进电机的基本原理我就不说了,百度能找出一大片来,,简而言之就是能够通过输入脉冲的个数,确定旋转的角位移,一般用他来控制小车轮子的偏移角度等。
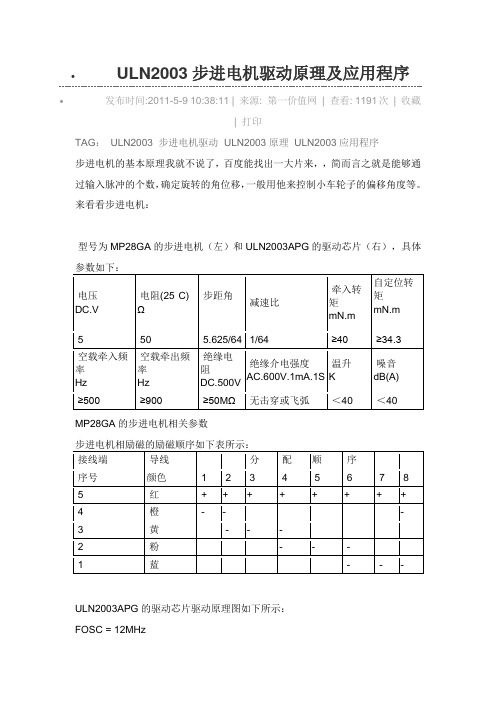
来看看步进电机:型号为MP28GA的步进电机(左)和ULN2003APG的驱动芯片(右),具体参数如下:电压DC.V电阻(25°C)Ω步距角°减速比牵入转矩mN.m自定位转矩mN.m5 50 5.625/64 1/64 ≥40≥34.3空载牵入频率Hz空载牵出频率Hz绝缘电阻DC.500V绝缘介电强度AC.600V.1mA.1S温升K噪音dB(A)≥500≥900≥50MΩ无击穿或飞弧<40 <40 MP28GA的步进电机相关参数接线端导线分配顺序序号颜色 1 2 3 4 5 6 7 8 5 红 + + + + + + + + 4 橙 - - - 3 黄 - - -2 粉- - -1 蓝 - - -ULN2003APG的驱动芯片驱动原理图如下所示:FOSC = 12MHz说得通俗uln2003相当于继电器的作用,例如7个继电器的一端连某电压[也即uln2003电源电压](<50)在一起,而另一端作为则作为输出,又好如一个二极管,只不过因电路集成功能的因素,输出的电压等同于uln2003的电压罢了,常用于步进电机;--------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为5.625度 . 一圈360 度, 需要64个脉冲完成!!!;--------------------------------------------------; A组线圈对应P2.4; B组线圈对应P2.5; C组线圈对应P2.6; D组线圈对应P2.7; 正转次序: AB组--BC组--CD组--DA组(即一个脉冲,正转5.625度);------------------------------------------------ORG 0000HLJMP MAINORG 0100HMAIN:;----------------------------正转MOV R3,#192 ;正转3圈共192个脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START ;对A的判断,当A=0时则转到START MOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转MOV R3,#64 ;反转一圈共64个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAIN;---------------------------转速控制DELAY: MOV R7,#40 ;步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RET;---------------------------延时控制DELAY1: MOV R4,#20 ;2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RET;---------------------------正反转表TABLE:DB 30H,60H,0C0H,90H; 正转表DB 00; 正转结束DB 30H,90H,0C0H,60H; 反转表DB 00; 反转结束END/**************************************//*杭州电子&计算机工作室*//* *//*步进电机演示程*//*目标器件:AT89S51 *//*晶振:11.0592MHZ *//*编译环境:Keil 7.50A *//****************************//*************包含头文件*******/#include/**************端口定义****************/ sbit key = P1^4;/*********************************函数功能:延时子程序入口参数:出口参数:*****************************************/ void delay(void){int k;for(k=0;k<500;k++);}/*************************************函数功能:主程序入口参数:出口参数:********************************/void main(){P1=0x00; //输出全高key=1; //按键置输入状态while(1) //主循环{if(key==1) //无键按下正转{P1=0xFC; //1100delay();P1=0xF6; //0110delay();P1=0xF3; //0011delay();P1=0xF9; //1001delay();}else //有键按下反转{P1=0xFC; //1100delay();P1=0xF9; //1001delay();P1=0xF3; //0011delay();P1=0xF6; //0110delay();}}}1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
uln2003驱动步进电机原理
uln2003驱动步进电机原理
ULN2003是一种集成电路芯片,常用于驱动步进电机。
它通常被用作步进电机驱动器,可以简化步进电机的控制和驱动。
ULN2003芯片内部包含7个开关二极管阵列,每个开关都能够承受较大的电流,因此可以直接驱动步进电机,而不需要外部电流放大器。
ULN2003驱动步进电机的原理是通过控制芯片内部的开关二极管来改变电流的流向,从而控制步进电机的转动。
步进电机是一种特殊的电动机,它通过控制电流的大小和方向来实现精确的角度转动。
ULN2003芯片内部的开关二极管可以提供所需的电流和电压,以驱动步进电机的不同相。
具体来说,ULN2003芯片内部有7个开关二极管,分别对应步进电机的不同相。
通过控制这些开关二极管的通断,可以实现对步进电机的精确控制。
通常情况下,通过外部的控制信号来控制
ULN2003芯片内部的开关二极管,从而控制步进电机的转动。
总的来说,ULN2003驱动步进电机的原理是利用芯片内部的开关二极管来控制电流的流向,从而控制步进电机的转动。
这种集成芯片的使用简化了步进电机的控制电路,提高了系统的稳定性和可
靠性。
ULN2003芯片在控制步进电机方面具有成本低、使用方便等优点,因此在各种应用中得到广泛的应用。
步进电机驱动技术3:基于ULN2003的步进电机驱动

步进电机驱动技术3:基于ULN2003的步进电机驱动 在我们的项⽬中,经常使⽤到低电压⼩功率的步进电机,此类步进电机若采⽤驱动器控制不断成本⾼也过于复杂,我们可以直接使⽤场效应管或者达林顿管来实现对其的驱动。
在本篇中,我们就来讨论⼀下基于ULN2003A达林顿管实现对步进电机的驱动。
1、功能概述 我们先来了解⼀下基本的功能。
ULN2003A达林顿管为7个输出通道,当导通时该通道连接到负端,所以⾮常适合于驱动4相5线步进电机。
1.1、ULN2003A达林顿管 ULN2003A 器件是⾼电压⼤电流达林顿晶体管阵列。
每款器件均由7个NPN 达林顿对组成,这些达林顿对具有⾼压输出,带有⽤于开关感性负载的共阴极钳位⼆极管。
单个达林顿对的集电极电流额定值为500mA。
将达林顿对并联可以提供更⾼的电流。
应⽤包括继电器驱动器、电锤驱动器、灯驱动器、显⽰驱动器(LED 和⽓体放电)、线路驱动器和逻辑缓冲器。
其基本结构图如下:1.2、步进电机基本原理 在我们的测试中,我们使⽤4相5线步进电机。
所谓4相5线步进电机就是该电机具有4组线圈5根连接线,实际上可能不只5根线,但公共端不管抽出多少根线,实际状态与1根⽆异。
我们⼀般将这4组线圈记为A相、B相、C相和D相,当然,也可以⽤别的称呼,只要便于标记分别就好。
4相5线步进电机⼀般采⽤单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
⼀般电机都会提供控制表,具体如下所⽰: 结合ULN2003A结构和4相5线步进电机的驱动要求,我们可以设计ULN2003A达林顿管驱动4相5线步进电机的驱动电路。
1.3、步进电机驱动模式 步进电机的驱动虽然按照电机的驱动表就可以实现,但实际的驱动⽅式有多种,常见的如单波驱动⽅式、全步驱动⽅式、半步驱动⽅式以及微步驱动⽅式等。
这⾥我们可以看⼀看前⾯三种⽐较简单的驱动⽅式。
单波驱动⽅式⼜称之为单四拍⼯作⽅式。
uln2003芯片

uln2003芯片ULN2003芯片:功能、特点及应用ULN2003芯片是一款常用的高电压、高电流驱动器芯片,常被用于电机控制、步进驱动、继电器驱动等应用。
本文将介绍ULN2003芯片的功能、特点及应用。
一、功能ULN2003芯片是一个集成了7个高电压、高电流驱动器的集成电路,每个驱动器的输出端可承受500mA电流,并且可以工作在电压高达50V的条件下。
除了输出端的高电压、高电流特性外,ULN2003芯片还具有以下几个主要的功能:1. 综合保护功能:ULN2003芯片内部具有电压和电流保护电路,当输入信号超过芯片额定电压时,可以自动进行断电保护,避免对芯片造成损坏。
2. 高速驱动能力:ULN2003芯片具有较快的开关速度,可以快速响应输入信号,并输出相应的驱动信号。
3. 高电流承受能力:每个驱动器的输出端可以承受高达500mA电流,可以满足多种高功率设备的驱动要求。
4. 低功耗设计:ULN2003芯片采用精细的低功耗设计,工作时能够有效地减少功耗,提高芯片的稳定性和可靠性。
二、特点除了以上功能外,ULN2003芯片还具有以下几个特点:1. 丰富的输出端口:ULN2003芯片共有7个输出端口,可以同时控制多个设备,方便用户实现多路控制。
2. 输出端口具有隔离功能:ULN2003芯片的输出端口具有隔离功能,可以隔离输入和输出信号,避免干扰和电压噪声对芯片的影响。
3. 可靠性高:ULN2003芯片采用高品质的材料和工艺制造,具有很高的可靠性和稳定性,在长时间工作和恶劣环境下能够正常运行。
4. 简单的引脚布局:ULN2003芯片的引脚布局非常简单明了,用户容易理解和操作。
三、应用ULN2003芯片的广泛应用涉及到多个领域:1. 电机控制:ULN2003芯片可用于控制直流电机的开关和转向等功能,例如电动车、无人机等。
2. 步进驱动:ULN2003芯片可用于步进电机的驱动控制,例如打印机、数码相机等设备。
3. 继电器驱动:ULN2003芯片可用于继电器的驱动控制,常用于工控领域。
单片机结合ULN2003驱动步进电机
U N 03 L 2 0是一种高耐压、 大电流的达林顿陈
列, 由七 ̄' N 林顿管组成 。 NP 达 每—对达林顿都
串联 一 个 27 . K的基 极 电阻 , V的工作 电压 下与 在5P5 】f 啊前 p T 源自 N4 6P1 伍 弼 7
p5 1 P 目爱 3/。 6
脉 冲个数来完成的, 通过控制脉 冲个数控制角位 移量 , 从而达 到准确定位的 目的。 四相电机具有 四相绕 组, 有八个独 立的引线终端 , 接方 式如 连
应制模 型, 判断是否大幅度 转向, 并 采用变脉 冲
宽度方式 来实现 电机 调速 。 程序设计 时把步 进
电机 的控 制方式 建 立成 控制模 型 , 以数 据表 并 形式 存于程序存储器中, 程序在应用过程就可 以 直接使用。 以四相 电机为例 , 设按照四相八拍 假 控制模式 ( 如图4 进行设置 , ) 把单片机 A 8 C T 9 5 1
序如表 l它以半步方式驱 动, , 也就是在某一通电 时间, 步进角仅前进一半。 对 四相步进 电机 驱动 的程 序设置按八 拍工 作 方 式 进 行 设 置 , 照 流 程 图 分 别 设 置 各 个 子 按 程序, 然后根据不同情况分别调用。
p e iey r cs l .
Ke wo ds S y r : CM Drv S e ie tpmo o tr
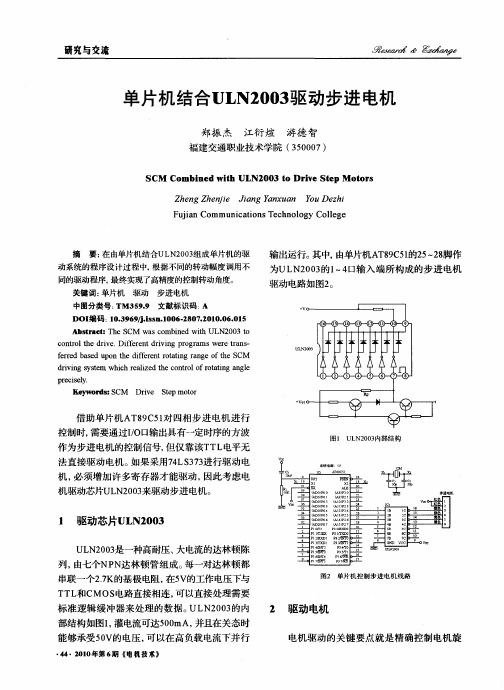
借助单片机 A 8 C T 9 5 对四相步进 电机进行 l 控制时, 需要通过I 输出具有一定时序的方波 / OH 作为步进电机的控制信号, 但仅靠该T L T 电平无 法直接驱动电机 。 如果采用7 L 3 3 4 7进行驱动电 S
输出运行。 其中, 由单片机A 8 C 1 5 2脚作 T 9 5的2 — 8 为UL 2 0 的l 4 N 0 3 ~ H输入 端所构成 的步进 电机
ULN2003步进电机接线图
void Delay(unsigned int i)//延时 { while(--i); }
main()
{
unsigned char i;
while(1)
{
for(i=0;i<4;i++)
//4 相
{
P1=F_Rotation[i]; //输出对应的相 可以自行换成反转表格
Delay(500);
//改变这个参数可以调整电机转速
//八拍方式驱动,顺序为 A AB B BC C CD D DA
unsigned char code clockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d};
void Delay(unsigned int i)//延时 { while(--i); }
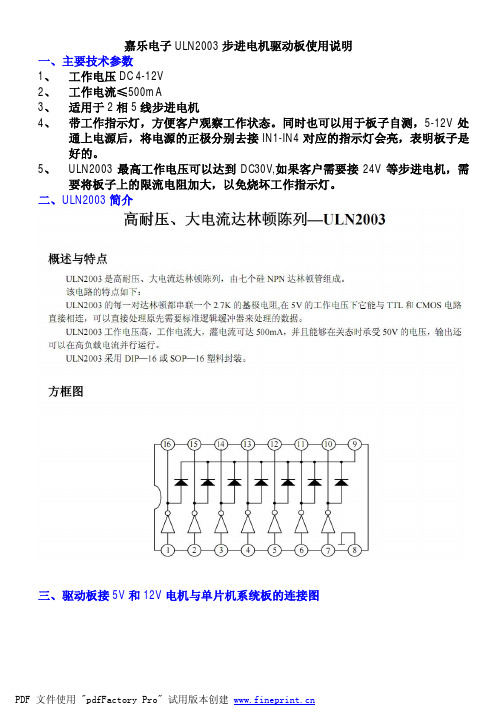
三、驱动板接 5V 和 12V 电机与单片机系统板的连接图
PDF 文件使用 "pdfFactory Pro" 试用版本创建
四、步进电机工作方式 电机可以使用单四拍、双四拍和八拍方式驱动 4.1 单四拍: A-B-C-D (0001、0010、0100、1000) #include <reg52.h>
}
}
}
4.2 双四拍:AB-BC-CD-DA(0011、0110、1100、1001) #include <reg52.h>
unsigned char code F_Rotation[4]={0x03,0x05,0x0D,0x09};//正转表格
unsigned char code B_Rotation[4]={0x09,0x0D,0x05,0x03};//反转表格
}
STM32通过ULN2003对步进电机进行控制

STM32通过ULN2003对步进电机进⾏控制1 前⾔本实验是基于STM32103芯⽚和ULN2003进⾏对步进电机的控制。
2 ULN2003的基本介绍2.1 ULN2003的概述ULN2003是⾼耐压、⼤电流复合晶体管阵列,由七个硅NPN 复合晶体管组成。
⼀般采⽤DIP—16 或SOP—16 塑料封装。
ULN2003的主要特点:ULN2003 的每⼀对达林顿都串联⼀个2.7K 的基极电阻,在5V 的⼯作电压下它能与TTL 和CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
ULN2003 ⼯作电压⾼,⼯作电流⼤,灌电流可达500mA,并且能够在关态时承受50V 的电压,输出还可以在⾼负载电流并⾏运⾏。
2.2 ULN2003的作⽤ULN2003是⼤电流驱动阵列,多⽤于单⽚机、智能仪表、PLC、数字量输出卡等控制电路中,可直接驱动继电器等负载。
输⼊5VTTL电平,输出可达500mA/50V。
简单地说,ULN2003其实就是⽤来放⼤电流的,增加驱动能⼒。
⽐如说单⽚机输出引脚⼀般输出就⼏mA,是⽆法驱动电机、继电器或者电磁阀的,像要让直流电机转需要500mA,⽽⽤ULN2003放⼤后,可以通过单⽚机的输出引脚直接控制这些设备。
⽽我们⽂章的⽬的是使⽤ULN2003芯⽚来增⼤单⽚机的输出电流使得单⽚机的输出电流可以驱动步进电机。
2.3 ULN2003的引脚图和功能引脚1:CPU脉冲输⼊端,端⼝对应⼀个信号输出端;引脚2:CPU脉冲输⼊端;引脚3:CPU脉冲输⼊端;引脚4:CPU脉冲输⼊端;引脚5:CPU脉冲输⼊端;引脚6:CPU脉冲输⼊端;引脚7:CPU脉冲输⼊端;引脚8:接地;引脚9:该脚是内部7个续流⼆极管负极的公共端,各⼆极管的正极分别接各达林顿管的集电极。
⽤于感性负载时,该脚接负载电源正极,实现续流作⽤。
如果该脚接地,实际上就是达林顿管的集电极对地接通;引脚10:脉冲信号输出端,对应7脚信号输⼊端;引脚11:脉冲信号输出端,对应6脚信号输⼊端;引脚12:脉冲信号输出端,对应5脚信号输⼊端;引脚13:脉冲信号输出端,对应4脚信号输⼊端;引脚14:脉冲信号输出端,对应3脚信号输⼊端;引脚15:脉冲信号输出端,对应2脚信号输⼊端;引脚16:脉冲信号输出端,对应1脚信号输⼊端。
ULN2003步进电机接线图及程序

ULN2003步进电机接线图及程序ULN2003 步进电机驱动板使用说明一、主要技术参数1、工作电压 DC 4-12V2、工作电流≤500mA3、适用于 2 相 5 线步进电机4、带工作指示灯,方便客户观察工作状态。
同时也可以用于板子自测,5-12V 处通上电源后,将电源的正极分别去接 IN1-IN4 对应的指示灯会亮,表明板子是好的。
5、ULN2003 最高工作电压可以达到DC30V,如果客户需要接24V 等步进电机,需要将板子上的限流电阻加大,以免烧坏工作指示灯。
二、ULN2003 简介三、驱动板接 5V 和 12V 电机与单片机系统板的连接图四、步进机工作式电机可以使用单四拍、双四拍和八拍方式驱动4.1 单四拍: A-B-C-D(0001、0010、0100、1000)#includeunsigned char code F_Rotation[4]={0x01,0x02,0x01,0x08};//正转表格unsigned char code B_Rotation[4]={0x08,0x04,0x02,0x01};//反转表格void Delay(unsigned int i)//延时{while(--i);main(){unsigned char i;while(1){for(i=0;i<4;i++) //4 相 {P1=F_Rotation[i]; //输出对应的相可以自行换成反转表格Delay(500); //改变这个参数可以调整电机转速}}}4.2 双四拍:AB-BC-CD-DA(0011、0110、1100、1001)#include unsigned char code F_Rotation[4]={0x03,0x05,0x0D,0x09};//正转表格unsigned char code B_Rotation[4]={0x09,0x0D,0x05,0x03};//反转表格void Delay(unsigned int i)//延时{while(--i);}main(){unsigned char i;while(1){for(i=0;i<4;i++) //4 相 {P1=F_Rotation[i]; //输出对应的相可以自行换成反转表格Delay(500); //改变这个参数可以调整电机转速}}4.3 八拍方式:A-AB-B-BC-C-CD-D-DA(0001、0011、0010、0110、0100、1100、1000、1001)#includesbit key=P2^0; //按键控制步进电机的方向//八拍方式驱动,顺序为 A AB B BC C CD D DAunsigned char code clockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d}; void Delay(unsigned int i)//延时{while(--i);}void main(){unsigned char i;while(1){for(i=0;i<8;i++){if(key) //按键未按下,正转{P0=clockWise[i];Delay(500);}else //按键按下,反转{P0=clockWise[8-i];Delay(500);}}。
uln2003工作原理

uln2003工作原理ULN2003芯片是一种集成的高压、驱动能力强、低功耗的直流电机控制器。
常用于开发电机驱动模块、继电器控制模块、步进电机的驱动模块等。
那么ULN2003工作的原理是什么呢?下面,我们就来一起探讨一下。
一、ULN2003芯片的特点1. 高压该芯片能够承受高达50V的电压,适合驱动各种种类的负载,能够满足大部分的应用需求。
2. 驱动能力强ULN2003芯片的用途之一就是电机驱动,其输出端有7路,在输出端能够提供驱动电流。
3. 低功耗ULN2003芯片的静电功耗很低,在不影响工作时可以大幅度地降低功耗,从而可以达到延长使用寿命的目的。
二、ULN2003芯片的应用ULN2003芯片广泛应用于自动化控制、仪器仪表、电源电波处理等领域,由于其可靠性和功耗低的特性,已经成为电力电子领域中不可缺少的元件。
ULN2003还可以用于各种类型的电机驱动、电子门锁、各种类型的继电器驱动等方面。
三、ULN2003芯片的工作原理ULN2003芯片的工作原理比较简单,是通过端口控制电压来实现驱动负载的。
1. 电机驱动模块在这个模块中,使用ULN2003芯片作为电机驱动控制器,通过它来驱动直流电机。
驱动方式是通过输出端口进行控制的,通过输入控制信号来控制输出的电流。
将ULN2003芯片的输出端口接上电机的驱动端口,并连接电源,并且将输入信号与控制端口相连,这样ULN2003芯片就能够实现对电机的控制。
2. 继电器控制模块在这个模块中,使用ULN2003芯片作为继电器控制器,通过它来驱动各种继电器。
驱动方式和电机驱动模块一样,也是通过输出端口进行控制的,同样也通过输入控制信号来控制输出的电流。
将ULN2003芯片的输出级联接继电器的控制端口,这样就能够控制继电器的开关,从而实现对继电器的控制。
3. 步进电机驱动模块在这个模块中,使用ULN2003芯片作为步进电机驱动控制器,通过它来实现对步进电机的控制。
与其他驱动模块类似,也是通过输出端口进行控制的,同时也是通过输入控制信号来控制输出的电流。
ULN2003的内部结构和功能

ULN2003的内部结构和功能:ULN是集成达林顿管IC,内部还集成了一个消线圈反电动势的二极管,可用来驱动继电器。
它是双列16脚封装,NPN晶体管矩阵,最大驱动电压=50V,电流=500mA,输入电压=5V,适用于TTL COMS,由达林顿管组成驱动电路。
ULN是集成达林顿管IC,内部还集成了一个消线圈反电动势的二极管,它的输出端允许通过电流为200mA,饱和压降VCE 约1V左右,耐压BVCEO 约为36V。
用户输出口的外接负载可根据以上参数估算。
采用集电极开路输出,输出电流大,故可直接驱动继电器或固体继电器,也可直接驱动低压灯泡。
通常单片机驱动ULN2003时,上拉2K的电阻较为合适,同时,COM引脚应该悬空或接电源。
ULN2003是一个非门电路,包含7个单元,但独每个单元驱动电流最大可达350mA.资料的最后有引用电路,9脚可以悬空。
比如1脚输入,16脚输出,你的负载接在VCC与16脚之间,不用9脚。
uln2003的作用:ULN2003是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中。
可直接驱动继电器等负载。
输入5VTTL电平,输出可达500mA/50V。
ULN2003是高耐压、大电流达林顿陈列,由七个硅NPN达林顿管组成。
该电路的特点如下: ULN2003的每一对达林顿都串联一个2.7K的基极电阻,在5V的工作电压下它能与TTL和CMOS电路直接相连,可以直接处理原先需要标准逻辑缓冲器。
ULN2003 是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点,适应于各类要求高速大功率驱动的系统。
ULN2003A引脚图及功能ULN2003 是高耐压、大电流、内部由七个硅NPN 达林顿管组成的驱动芯片。
经常在以下电路中使用,作为:1、显示驱动2、继电器驱动3、照明灯驱动4、电磁阀驱动5、伺服电机、步进电机驱动等电路中。
ULN2003 的每一对达林顿都串联一个2.7K 的基极电阻,在5V 的工作电压下它能与TTL 和CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
步进电机(ULN2003)

步进电机驱动器的设计摘要:由在单片机结合ULN2003组成单片机的驱动系统的程序设计过程中,通过操作按键对步进电机的正转、反转和启动、停止。
关键词:单片机驱动步进电机目录一、单片机的驱动原理 (3)二、单片机最小系统 (4)三、 Max232串口电路 ... .. (7)四、步进电机驱动模块电路 (8)五、系统的软件设计 (9)附:参考文献 (33)一、步进电机的驱动原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机是将电脉冲信号转变为角位移或线位移的一种开环线性执行元件,具有无累积误差、成本低、控制简单特点。
产品从相数上分有二、三、四、五相,从步距角上分有0.9°/1.8°、0.36°/0.72°,从规格上分有口42~φ130,从静力矩上分有0.1N·M~40N·M。
(本实验提供的是四相步进电机,它对外有六条引线,其中二条为公共端、另四条分别为A相、B相、C相、D相,但引线具体排序未知,故在使用前需对步进电机进行分析、测试,并判断出具体的相序。
)二、单片机最小系统单片机最小系统,或者称为最小应用系统,是指用最少的元件组成的单片机可以工作的系统.对51系列单片机来说,最小系统一般应该包括:单片机、晶振电路、复位电路.下面给出一个51单片机的最小系统电路图.说明:复位电路:由电容串联电阻构成,由图并结合"电容电压不能突变"的性质,可以知道,当系统一上电,RST脚将会出现高电平,并且,这个高电平持续的时间由电路的RC值来决定.典型的51单片机当RST脚的高电平持续两个机器周期以上就将复位,所以,适当组合RC的取值就可以保证可靠的复位.一般教科书推荐C 取10u,R取8.2K.当然也有其他取法的,原则就是要让RC组合可以在RST脚上产生不少于2个机周期的高电平.至于如何具体定量计算,可以参考电路分析相关书籍.晶振电路:典型的晶振取11.0592MHz(因为可以准确地得到9600波特率和19200波特率,用于有串口通讯的场合)/12MHz(产生精确的uS级时歇,方便定时操作)复位电路一、复位电路的用途单片机复位电路就好比电脑的重启部分,当电脑在使用中出现死机,按下重启按钮电脑内部的程序从头开始执行。
uln2003驱动步进电机的原理

uln2003驱动步进电机的原理英文回答:The ULN2003 is a Darlington transistor array that is commonly used to drive stepper motors. It consists of seven NPN Darlington pairs, each of which can handle up to 500mA of current. This makes it ideal for driving small stepper motors that require currents of up to 3.5A.The ULN2003 is a very easy-to-use chip. It has a simple pinout, and it can be driven directly from a microcontroller. The only external components that are required are a few resistors to limit the current through the Darlington pairs.The ULN2003 can be used to drive stepper motors in a variety of ways. The most common way is to use it to drive a unipolar stepper motor. Unipolar stepper motors have two coils, and they can be driven in one direction or the other by reversing the polarity of the current through the coils.To drive a unipolar stepper motor with the ULN2003, you will need to connect the two coils of the motor to the outputs of the ULN2003. You will also need to connect a resistor to each of the outputs of the ULN2003 to limit the current through the Darlington pairs.Once you have connected the ULN2003 to the stepper motor, you can drive the motor by sending pulses to the inputs of the ULN2003. The pulses should be in the correct order to cause the motor to rotate in the desired direction.The ULN2003 can also be used to drive bipolar stepper motors. Bipolar stepper motors have four coils, and theycan be driven in either direction by reversing the polarity of the current through the coils.To drive a bipolar stepper motor with the ULN2003, you will need to connect the four coils of the motor to the outputs of the ULN2003. You will also need to connect a resistor to each of the outputs of the ULN2003 to limit the current through the Darlington pairs.Once you have connected the ULN2003 to the stepper motor, you can drive the motor by sending pulses to the inputs of the ULN2003. The pulses should be in the correct order to cause the motor to rotate in the desired direction.The ULN2003 is a very versatile chip that can be usedto drive a variety of stepper motors. It is a very easy-to-use chip, and it can be driven directly from a microcontroller. If you are looking for a way to drive a stepper motor, the ULN2003 is a great option.中文回答:ULN2003是一个达林顿晶体管阵列,通常用于驱动步进电机。
uln2003芯片

uln2003芯片ULN2003芯片是一种集成电路芯片,通常用于驱动电机和继电器。
它由七个达林顿对组成,每个达林顿对都有一个PMOS 和一个NMOS组成,用于高电平和低电平的缓冲放大。
ULN2003芯片具有以下特点:1. 七个可编程输出:ULN2003芯片有七个输出引脚,每个引脚都可以独立控制,方便驱动多个电机或继电器。
2. 高电流和高电压:ULN2003芯片的输出端可承受较高的电流和电压。
最大承受电流为500mA,最大承受电压为50V,这使得它适合于控制大功率电机和继电器。
3. 内置自由杜邦二极管:每个达林顿对都内置有自由杜邦二极管,用于保护开关管件免受反向电压的损害,从而提高芯片的可靠性。
4. 浅休眠电流:当输出为低电平时,ULN2003芯片的休眠电流非常低,这有助于降低功耗和发热。
5. 输入与控制电平兼容:ULN2003芯片的输入引脚采用TTL 和CMOS电平控制,与常见的逻辑电平完全兼容,方便与其他数字电路集成。
6. DIP封装:ULN2003芯片常见的封装形式是DIP(双列直插封装),便于插入电路板并易于焊接。
应用领域:ULN2003芯片广泛应用于各种电路和设备中,特别是用于驱动电机和控制继电器。
其中一种常见的应用是步进电机的驱动,通过控制ULN2003芯片的输入和输出,可以实现步进电机的正转、反转、停止和控制速度等功能。
另外,ULN2003芯片还可用于控制其他高功率装置,比如控制灯光、驱动音响设备、控制高功率电磁阀等。
由于它具有高电流和高电压的特性,适用于控制需要较大功率的设备。
在工业领域,ULN2003芯片的应用非常广泛。
比如控制机械臂、驱动输送带、控制温度传感器等,都可以通过ULN2003芯片实现。
总结:ULN2003芯片是一种多用途的集成电路芯片,具有高电流、高电压的特点。
它适用于驱动电机和控制继电器,广泛应用于各种电路和设备中,特别是在机械驱动和工控领域。
它的七个可编程输出、内置自由杜邦二极管和与常见逻辑电平兼容的特性,都使得它成为一种非常实用和重要的驱动芯片。
ULN2003步进电机驱动原理及应用程序
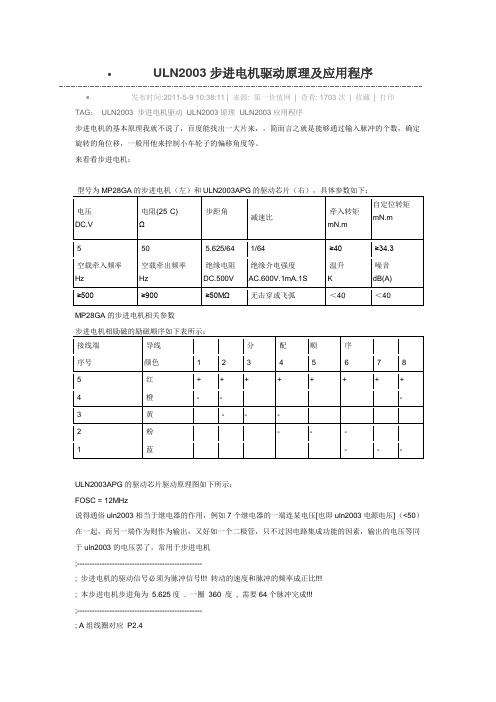
∙ULN2003步进电机驱动原理及应用程序∙发布时间:2011-5-9 10:38:11 | 来源: 第一价值网| 查看: 1703次| 收藏| 打印TAG:ULN2003 步进电机驱动 ULN2003原理 ULN2003应用程序步进电机的基本原理我就不说了,百度能找出一大片来,,简而言之就是能够通过输入脉冲的个数,确定旋转的角位移,一般用他来控制小车轮子的偏移角度等。
来看看步进电机:型号为MP28GA的步进电机(左)和ULN2003APG的驱动芯片(右),具体参数如下:电压DC.V电阻(25°C)Ω步距角°减速比牵入转矩mN.m自定位转矩mN.m5 50 5.625/64 1/64 ≥40≥34.3空载牵入频率Hz空载牵出频率Hz绝缘电阻DC.500V绝缘介电强度AC.600V.1mA.1S温升K噪音dB(A)≥500≥900≥50MΩ无击穿或飞弧<40 <40MP28GA的步进电机相关参数接线端导线分配顺序序号颜色 1 2 3 4 5 6 7 85 红 + + + + + + + +4 橙 - - -3 黄 - - -2 粉- - -1 蓝 - - -ULN2003APG的驱动芯片驱动原理图如下所示:FOSC = 12MHz说得通俗uln2003相当于继电器的作用,例如7个继电器的一端连某电压[也即uln2003电源电压](<50)在一起,而另一端作为则作为输出,又好如一个二极管,只不过因电路集成功能的因素,输出的电压等同于uln2003的电压罢了,常用于步进电机;--------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为5.625度 . 一圈360 度, 需要64个脉冲完成!!!;--------------------------------------------------; A组线圈对应P2.4; B组线圈对应P2.5; C组线圈对应P2.6; D组线圈对应P2.7; 正转次序: AB组--BC组--CD组--DA组(即一个脉冲,正转5.625度) ;------------------------------------------------ORG 0000HLJMP MAINORG 0100HMAIN:;----------------------------正转MOV R3,#192 ;正转3圈共192个脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START ;对A的判断,当A=0时则转到STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转MOV R3,#64 ;反转一圈共64个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAIN;---------------------------转速控制DELAY: MOV R7,#40 ;步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RET;---------------------------延时控制DELAY1: MOV R4,#20 ;2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RET;---------------------------正反转表TABLE:DB 30H,60H,0C0H,90H; 正转表DB 00; 正转结束DB 30H,90H,0C0H,60H; 反转表DB 00; 反转结束END/**************************************//*杭州电子&计算机工作室*//* *//*步进电机演示程*//*目标器件:AT89S51 *//*晶振:11.0592MHZ *//*编译环境:Keil 7.50A *//****************************//*************包含头文件*******/#include/**************端口定义****************/sbit key = P1^4;/*********************************函数功能:延时子程序入口参数:出口参数:*****************************************/ void delay(void){int k;for(k=0;k<500;k++);}/*************************************函数功能:主程序入口参数:出口参数:********************************/void main(){P1=0x00; //输出全高key=1; //按键置输入状态while(1) //主循环{if(key==1) //无键按下正转{P1=0xFC; //1100delay();P1=0xF6; //0110delay();P1=0xF3; //0011delay();P1=0xF9; //1001delay();}else //有键按下反转{P1=0xFC; //1100delay();P1=0xF9; //1001delay();P1=0xF3; //0011delay();P1=0xF6; //0110delay();}}}1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
uln2003驱动原理

uln2003驱动原理ULN2003驱动原理ULN2003是一款多通道继电器和电机驱动器芯片,采用高电流达500mA的晶体管数组接口,可以用于驱动各种外部负载。
其原理基于晶体管开关放大器的工作原理,通过控制输入端的电流流向,以控制负载的电流流动。
下面将一步一步回答有关ULN2003驱动器的原理问题。
第一步:了解ULN2003芯片的结构ULN2003芯片内部包含7个开关放大器(晶体管),每一个开关放大器都可以独立地控制一个外部负载。
每个开关放大器都由NPN和PNP晶体管组成,它们连接在一起以形成一个开关电路。
第二步:ULN2003芯片的输入端和输出端ULN2003芯片有7个输入端和7个输出端。
输入端用于控制开关放大器,输出端用于连接外部负载。
输入端采用低电平触发,即通过给输入端提供低电平(接地),可以打开相应的开关放大器,使其连接到地线。
输出端通过开关放大器与外部负载相连。
第三步:ULN2003芯片的工作原理当输入端与地相连时,对应的开关放大器将对应的输出端与地相连。
当输入端与电源(Vcc)相连时,对应的开关放大器将断开输出端与地的连接。
第四步:连接外部负载到ULN2003芯片将外部负载的正极连接到输入端所对应的输出端,负极连接到地。
通过控制输入端的电平,可以控制外部负载的通断。
第五步:工作电流和电压ULN2003芯片的工作电流范围为0至500mA,工作电压范围为5至50V。
可以根据需要选择适当的电流和电压来驱动外部负载。
第六步:应用领域ULN2003芯片常用于需要控制多个外部负载的应用,如步进电机驱动、继电器控制等。
其具有高电流、高压的特点,能够稳定可靠地驱动各种负载。
总结:ULN2003驱动器的原理基于晶体管开关放大器工作原理,通过控制输入端的电平来控制外部负载的通断。
ULN2003芯片内部有7个开关放大器,每个开关放大器可以独立地控制一个外部负载。
ULN2003芯片工作电流范围为0至500mA,工作电压范围为5至50V。
基于ULN2003 控制步进电机正反转
基于ULN2003 控制步进电机正反转第24组电子设计报告组员:郝冠 111308309郭剑楠 111308308李爽 111308317一、功能说明本设计是基于STC89C52单片机和ULN2003 芯片能控制步进电机正反转的设计。
程序由我们自己完成的。
是由按键引发外部中断来控制步进电机输入信号端先后顺序,从而改变正反转。
功能通过按键输入外部中断信号,改变步进电机步进方向。
还可改进地方:用数码管显示当前步进电机旋转速度,再用按键来控制步进电机旋转速度。
二、原理图(1)52芯片引脚图(2)ULN2003芯片原理图三、程序源代码//本程序内容:使用外部中断控制步进电机的正传和反转// //注意外部中断必须用P3^2//#include<reg52.h>#define uint unsigned int#define uchar unsigned charuchar flag;sbit k1=P3^2;//步进电机数据口取名sbit A1=P3^4;sbit B1=P3^5;sbit C1=P3^6;sbit D1=P3^7;//步进电机1四相八拍所用数据#define POWER_A1 {A1=1;B1=0;C1=0;D1=0;}//A相通电,其他相断电#define POWER_B1 {A1=0;B1=1;C1=0;D1=0;}//B相通电,其他相断电#define POWER_C1 {A1=0;B1=0;C1=1;D1=0;}//C相通电,其他相断电#define POWER_D1 {A1=0;B1=0;C1=0;D1=1;}//D相通电,其他相断电#define POWER_AB1 {A1=1;B1=1;C1=0;D1=0;}//AB相通电,其他相断电#define POWER_BC1 {A1=0;B1=1;C1=1;D1=0;}//BC相通电,其他相断电#define POWER_CD1 {A1=0;B1=0;C1=1;D1=1;}//CD相通电,其他相断电#define POWER_DA1 {A1=1;B1=0;C1=0;D1=1;}//DA相通电,其他相断电#define POWER_OFF {A1=0;B1=0;C1=0;D1=0;}//全部断电void delay_ms(unsigned char t){uchar x,y;for(x=t;x>0;x--){for(y=114;y>0;y--) ;}}uchar speed; //定义速度全局变量,也是时间延迟变量uint i; //旋转一周时间,512一周void main(){EA=1; //全局中断开EX0=1; //外部中断0开IT0=1; //1表示边沿触发i=512;speed=6;POWER_OFFwhile(1){while(i--){if(flag==0){POWER_A1delay_ms(speed);POWER_AB1delay_ms(speed);POWER_B1delay_ms(speed);POWER_BC1delay_ms(speed);POWER_C1delay_ms(speed);POWER_CD1delay_ms(speed);POWER_D1delay_ms(speed);POWER_DA1delay_ms(speed);}else{POWER_DA1delay_ms(speed);POWER_D1delay_ms(speed);POWER_CD1delay_ms(speed);POWER_C1delay_ms(speed);POWER_BC1delay_ms(speed);POWER_B1delay_ms(speed);POWER_AB1delay_ms(speed);POWER_A1delay_ms(speed);}}}}void ex0(void) interrupt 0{if(k1==0){delay_ms(10);if(k1==0){flag=~flag;}}}四、设计总结本次设计完全是我们自己写的程序,有很多没有考虑到的地方,需要我们今后更加努力,改进程序,使功能更齐全,操作更简单。
uln2003引脚图及功能_工作原理驱动应用电路

uln2003有什么作用_引脚图及功能_工作原理及驱动应用电路一、uln2003有什么作用ULN2003是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中。
可直接驱动继电器等负载。
输入5VTTL电平,输出可达500mA/50V。
ULN2003是高耐压、大电流达林顿陈列,由七个硅NPN达林顿管组成。
该电路的特点如下: ULN2003的每一对达林顿都串联一个2.7K的基极电阻,在5V 的工作电压下它能与TTL和CMOS电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
ULN2003 是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点,适应于各类要求高速大功率驱动的系统。
三、uln2003工作原理驱动应用电路ULN2003是高耐压、大电流复合晶体管阵列,由七个硅NPN 复合晶体管组成,每一对达林顿都串联一个2.7K 的基极电阻,在5V 的工作电压下它能与TTL 和CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
LN2003也是一个7路反向器电路,即当输入端为高电平时ULN2003输出端为低电平,当输入端为低电平时ULN2003输出端为高电平,继电器得电吸合。
ULN2003是一个非门电路,包含7个单元,单独每个单元驱动电流最大可达500mA,9脚可以悬空。
比如1脚输入,16脚输出,你的负载接在VCC与16脚之间,不用9脚。
陈翠•来源:网络整理• 2017年10月23日14:37 • 12146次阅读ULN2003应用电路在自动化密集的的场合会有很多被控元件如继电器,微型电机,风机,电磁阀,空调,水处理等元件及设备,这些设备通常由CPU所集中控制,由于控制系统不能直接驱动被控元件,这需要由功率电路来扩展输出电流以满足被控元件的电流,电压。
高压大电流达林顿晶体管阵列系列产品就属于这类可控大功率器件,由于这类器件功能强、应用范围语广。
ULN2003步进电机驱动原理及应用程序
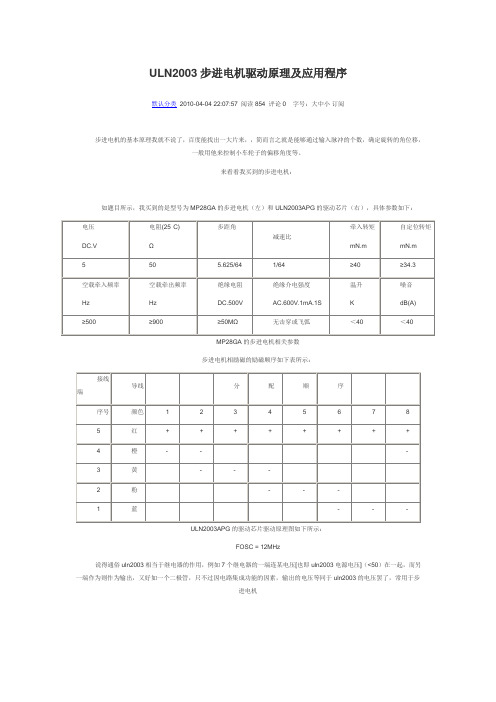
ULN2003步进电机驱动原理及应用程序默认分类2010-04-04 22:07:57 阅读854 评论0 字号:大中小订阅步进电机的基本原理我就不说了,百度能找出一大片来,,简而言之就是能够通过输入脉冲的个数,确定旋转的角位移,一般用他来控制小车轮子的偏移角度等。
来看看我买到的步进电机:如题目所示,我买到的是型号为MP28GA的步进电机(左)和ULN2003APG的驱动芯片(右),具体参数如下:MP28GA的步进电机相关参数步进电机相励磁的励磁顺序如下表所示:;--------------------------------------------------; 步进电机的驱动信号必须为脉冲信号转动的速度和脉冲的频率成正比; 本步进电机步进角为5.625度 . 一圈360 度, 需要64个脉冲完成;--------------------------------------------------; A组线圈对应P2.4; B组线圈对应P2.5; C组线圈对应P2.6; D组线圈对应P2.7; 正转次序: AB组--BC组--CD组--DA组(即一个脉冲,正转5.625度);------------------------------------------------ORG 0000HLJMP MAINORG 0100HMAIN:;----------------------------正转MOV R3,#192 ;正转3圈共192个脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START ;对A的判断,当A=0时则转到STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转MOV R3,#64 ;反转一圈共64个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAIN;---------------------------转速控制DELAY: MOV R7,#40 ;步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RET;---------------------------延时控制DELAY1: MOV R4,#20 ;2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RET;---------------------------正反转表TABLE:DB 30H,60H,0C0H,90H; 正转表DB 00; 正转结束DB 30H,90H,0C0H,60H; 反转表DB 00; 反转结束END/**************************************/ /*杭州电子&计算机工作室*//* *//*步进电机演示程*//*目标器件:AT89S51 *//*晶振:11.0592MHZ *//*编译环境:Keil 7.50A *//****************************//*************包含头文件*******/#include <reg51.h>/**************端口定义****************/sbit key = P1^4;/*********************************函数功能:延时子程序入口参数:出口参数:*****************************************/void delay(void){int k;for(k=0;k<500;k++);}/*************************************函数功能:主程序入口参数:出口参数:********************************/void main(){P1=0x00; //输出全高key=1; //按键置输入状态while(1) //主循环{if(key==1) //无键按下正转{P1=0xFC; //1100delay();P1=0xF6; //0110delay();P1=0xF3; //0011delay();P1=0xF9; //1001delay();}else //有键按下反转{P1=0xFC; //1100delay();P1=0xF9; //1001delay();P1=0xF3; //0011delay();P1=0xF6; //0110delay();}}}1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
基于单片机ULN2003的步进电机控制系统(汇编及C语言程序各一个)

图8 总体电路图1.3.4软件设计通过分析可以看出,实现系统功能可以采用多种方法,由于随时有可能输入加速、加速信号和方向信号,因而采用中断方式效率最高,这样总共要完成4个部分的工作才能满足课题要求,即主程序部分、定时器中断部分、外部中断0和外部中断1部分,其中主程序的主要功能是系统初始参数的设置及启动开关的检测,若启动开关合上则系统开始工作,反之系统停止工作;定时器部分控制脉冲频率,它决定了步进电机转速的快慢;两个外部中断程序要做的工作都是为了完成改变速度这一功能。
下面分析主程序与定时器中断程序及外部中断程序。
(1)主程序设计主程序中要完成的工作主要有系统初始值的设置、系统状态的显示以及各种开关状态的检测判断等。
其中系统初始状态的设置内容较多,该系统中,需要初始化定时器、外部中断;对P1口送初值以决定脉冲分配方式,速度值存储区送初值决定步进电机的启动速度,对方向值存储区送初值决定步进电机旋转方向等内容。
若初始化P1=11H、速度和方向初始值均设为0,就意味着步进电机按四相单四拍运行,系统上电后在没有操作的情况下,步进电机不旋转,方向值显示“0”,速度值显示“0”,主程序流程图如图9所示。
(2)定时中断设计步进电机的转动主要是给电机各绕组按一定的时间间隔连续不断地按规律通入电流,步进电机才会旋转,时间间隔越短,速度就越快。
在这个系统中,这个时间间隔是用定时器重复中断一定次数产生的,即调节时间间隔就是调节定时器的中断次数,因而在定时器中断程序中,要做的工作主要是判断电机的运行方向、发下一个脉冲,以及保存当前的各种状态。
程序流程图如图10所示。
(3)外部中断设计外部中断所要完成的工作是根据按键次数,改变速度值存储区中的数据(该数据为定时器的中断次数),这样就改变了步进电机的输出脉冲频率,也就是改变了电机的转速。
速度增加按钮S2为INT0中断,其程序流程为原数据,当值等于7时,不改变原数值返回,小于7时,数据加1后返回;速度减少按钮S3,当原数据不为0,减1保存数据,原数据为0则保持不变。