MQ2535门座式起重机结构简介
门座式起重机

谢谢观看
门座式起重机
起重机
01 简史
03 组成
目录
02 分类 04 系统
门座起重机大多沿地面或建筑物上的起重机轨道运行,进行起重装卸作业。门座呈“”字形的起重机称半门 座起重机,其运行轨道的一侧设在地面上,另一侧设在高于地面的建筑物上。
简史
门座起重机是随着港口事业的发展而发展起来的。1890年,第一次将幅度不可变的固定式可旋转臂架型起重 机装在横跨于窄码头上方的运行式半门座上,成为早期的港用半门座起重机。随着码头宽度的加大,门座和半门 座起重机并列发展,并普遍采用俯仰臂架和水平变幅系统。第二次世界大战后,港用门座起重机迅速发展为便于 多台起重机对同一条船进行并列工作,普遍采用了转动部分与立柱体相连的转柱式门座起重机(图1[转柱式门座 起重机]),或转动部分通过大轴承与门座相连的滚动轴承式支承回转装置,以减小转动部分的尾径,并采用了减 小码头掩盖面(门座主体对地面的投影)的门座结构。在发展过程中,门座起重机还逐步推广应用到作业条件与 港口相近的船台和水电站工地等处。
③建筑安装用门座起重机:主要用在水电站进行大坝浇灌、设备和预制件吊装等,一般用吊钩。起重量和工 作速度一般介于前两类起重机之间。它具有整机装拆运输性好、吊具下放深度大、能较好地适应临时性工作和栈 桥上工作等的特点。
组成
门座起重机有起升、回转、变幅和运行机构,前3种机构装在转动部分上,每一周期内都参加作业。转动部分 上还装有可俯仰的倾斜单臂架或组合臂架及司机室。运行机构装在门座下部,用以调整起重机的工作位置带斗门 座起重机(图2 [带斗门座起重机])还装有伸缩漏斗、带式输送机等附加设备,以提高门座起重机用抓斗装卸散 状物料时的生产率。除电气保护装置外,还装有起重量或起重力矩限制、起重机夹轨器等安全装置。
港口机械操作门座起重机的工作结构认识
项目三门座起重机的认识、维护与操作任务一门座起重机工作机构认识任务导读本任务通过任务的学习,了解门座式起重机各工作机构、吊具的工作原理和结构组成;门座式起重机各机构的主要零部件的结构组成和工作原理。
教学目标知识目标:了解门座起重机的构造特征以及运用的场合;了解门座起重机的性能参数;掌握门座起重机的起升、变幅、回转和运行四个机构的结构特点、组成与动作原理。
能力目标:具备门座起重机的构造特征、工作机构认识的能力。
工作任务描述桥式起重机各机构的结构组成及特点,并填写任务单。
图门座起重机知识储备一、门座起重机产品简介门座起重机是在港口码头前沿装卸一般散货和杂货的通用港口装卸机械。
根据货种不同可分别使用吊钩或抓斗两种吊具。
它工作幅度大、速度高,可以带载作水平位移变幅,带载作任意角度回转,可以在所有工作范围内作起升、变幅、回转的单独或联合动作,操作方便,动作灵活,可使用于海港或内河港口。
门座起重机使用、三相四线制交流电源,所有机构全部采用封闭的三相异步变频电动机驱动。
门座起重机适用于轨距为,沿水平平行直线铺设的钢轨轨道。
钢轨型号为中规定的型。
要求轨道接地良好。
门座起重机设有安全操作所必需的各种电气、机械保护装置。
门座起重机机房平面布置见图。
门座起重机的主要性能参数见表。
執道平血小贞阳1:和图门座起重机机房平面布置图名称单位参数工作级别起重量幅度最大幅度最小幅度起升高度轨面上轨面下工作速度起升速度变幅速度回转速度行走速度电动机起升电机X变幅电机回转电机立式X行走电机X 轨距基距行走车轮数个其中驱动轮个最大轮压最大工作风压转台尾部回转半径< 装机容量电源电缆卷筒三相四线左右。
本机可用于抓斗或吊钩作起升系统包括起升机构和钢丝绳滑轮系统。
起升机构由两部单独的绞车组成。
两部绞车可以单独或联合动作,便于起重机使用四索抓斗装卸散货或使用吊钩装卸件货。
每部绞车均由电动机、联轴器、减速器、常闭式制动器、电机风机及钢丝绳卷筒组成。
MQ3235门座式起重机总体计算书
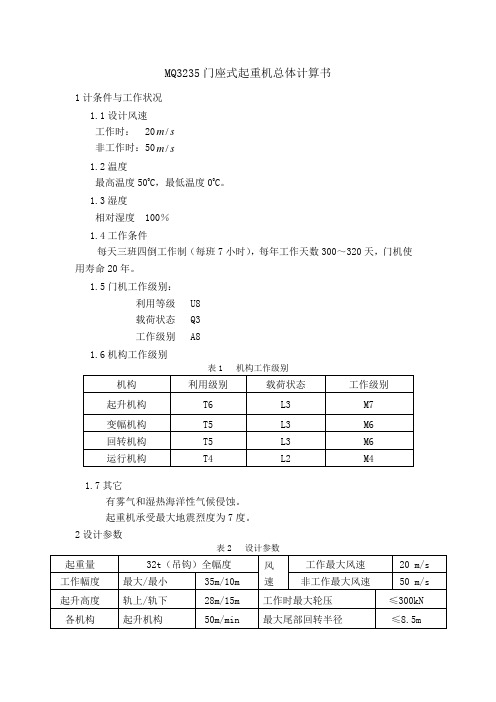
MQ3235门座式起重机总体计算书1计条件与工作状况1.1设计风速工作时: 20/m s非工作时:50/m s1.2温度最高温度500C,最低温度00C。
1.3湿度相对湿度 100%1.4工作条件每天三班四倒工作制(每班7小时),每年工作天数300~320天,门机使用寿命20年。
1.5门机工作级别:利用等级 U8载荷状态 Q3工作级别 A81.6机构工作级别表1 机构工作级别1.7其它有雾气和湿热海洋性气候侵蚀。
起重机承受最大地震烈度为7度。
2设计参数3.1采用图解法确定臂架各部分的尺寸和大拉杆下铰点位置图1 初步确定的臂架尺寸和大拉杆下铰点位置图2臂架尺寸和大拉杆下铰点位置表3 臂架各部分尺寸图3 物品的水平位移①吊重全幅度水平落差应满足:max max min 4370.02()0.02(3510)0.5y h R R m ∆=<∆=-=⨯-=(满足) ②吊重全幅度未平衡力矩应满足:max 20380.10.132********Q M kN m M kN m =⋅>=⨯⨯⨯=⋅(不满足要求) ③象鼻梁端点水平速度应满足:102cos cos A r v v Lr βωβ==平 0ω—臂架摆动角速度max min 2.0952.852 2.60.735v v ==>平平(不满足) 3.2臂架系统自重平衡和合成力矩(初步估算,选配重29t )表5 不平衡力矩表6 最大和最小不平衡力矩检验不平衡力矩:M ∆—臂架系统自重的不平衡力矩QM —吊重不平衡力矩 ① 最大幅度时 0M ∆< 且 00Q M M ∆+<(满足) 最小幅度时 0M ∆> 且 00Q M M ∆+>(满足)② max 3203511200Q M QR kNm ==⨯=max 1266.060.10.1112001120Q M kNm M kNm ∆=>=⨯=(不满足)4稳定性验算4.1.起重机各部分重心4.2.载重稳定性验算 4.2.1.第一种计算工况计算位置取起重机臂架垂直于运行轨道方向(因为轨距小于基距)、倾覆棱边在前沿轨面。
MQ25t-35m门座起重机结构制造工艺要点

工艺方案XW/BQ0901-03 No:MQ25-01MQ25t-35m/40t-27m门座起重机结构制造工艺要点编制:审核:批准:2012年7月2日实施目录一、门座起重机概述 ...................................................................... 1二、基本情况介绍 .......................................................................... 1三、技术工艺要求 .......................................................................... 4四、外协技术控制 .......................................................................... 6五、重点工艺控制 .......................................................................... 6六、工艺要求及检测 ...................................................................... 7七、端梁结构制作工艺要点 ...................................................... 11八、主梁结构制作工艺要点 ...................................................... 13九、转台合成结构制作工艺要点 .............................................. 17十、立柱结构制作工艺要点 ...................................................... 18十一、平衡梁结构制作工艺要点 .................................................. 19十二、小拉杆结构制作工艺要点 .................................................. 20十三、大拉杆结构制作工艺要点 .................................................. 21十四、臂架结构制作工艺要点 ...................................................... 22十五、象鼻梁结构制作工艺要点 .................................................. 23十六、运行机构工艺要点 .............................................................. 24十七、门架与端梁研配工艺要点 .................................................. 25十八、门架与圆筒研配工艺要点 .................................................. 25十九、大车机构与圆筒门架组对工艺要点 .................................. 26二十、转台与立柱研配工艺要点 .................................................. 27二十一、臂架预装工艺要点 ................................................... 28二十二、各机构试车 ............................................................... 30二十三、涂漆技术要求 ........................................................... 31二十四、各部件需用时间 ....................................................... 322328966779.doc- 1-一、门座起重机概述MQ25t-35m/40t-27m门座起重机用于码头的岸边门机轨道上,配置吊钩、抓斗,可用于重件、散货和集装箱的装卸作业。
25T-37M门座式起重机参数规格书
25T-37M门座式起重机参数规格书日照港岚北港务有限公司25T-37M门座式起重机技术规格书第一章概述1.1 总则 (4)1.2 安装地点 (5)1.3 设计制造标准 (5)1.4 工作条件 (6)1.5 起重机工作级别 (7)1.6 稳定性 (8)1.7 主要技术参数 (8)1.8 供货范围 (9)1.9 供货方式、交货期 (10)第二章结构2.1 一般要求 (11)2.2 材料 (11)2.3 金属结构制造工艺 (11)2.4 臂架、门架、主梁和端梁 (13)2.5 四连杆机构和人字架 (14)2.6 平台、通道、阶梯和直梯 (14)2.7 机房 (14)2.8 电气房 (15)2.9 高压室 (16)2.10 司机室 (16)第三章工作机构3.1 一般要求 (19)3.2 一般机械零部件 (20)3.3 起升机构 (23)3.4 变幅机构 (24)3.5 旋转机构 (25)3.6 行走机构 (26)3.7 安全连锁保护装置 (27)3.8 润滑系统 (29)第四章电气与控制4.1 电气系统一般准则 (30)4.2 供配电系统 (30)4.3 主要电气设备 (33)4.4 司机室操作 (35)4.5 配电屏与控制屏、柜与端子 (35)4.6 电缆和电缆敷设 (36)4.7 照明 (37)4.8 接地和防雷 (38)4.9 起重机监控管理系统(CMS) (38)第五章通信5.1 有线电话通信 (42)5.2 无线电话对讲机 (42)5.3 扩音设备 (42)第六章涂装6.1 预处理和底漆 (43)6.2 油漆厚度 (44)第七章标记和铭牌、起重机基本配置和备品备件7.1 标记和铭牌 (45)7.2 起重机基本配置 (46)7.3 备品和备件 (47)第八章项目管理和相关要求8.1 设计审查及图纸资料 (49)8.2 竣工图和最终技术文件 (51)8.3 监造 (53)8.4 培训 (55)第九章安装、调试和验收9.1 运输 (55)9.2 现场安装调试 (56)9.3 起重机的最终验收 (58)第一章概述本技术规格书其内容明确本次招标的起重机基本的技术要求和确保这些基本技术要求所必须的相关条款,并非起重机的所有细节,投标人应仔细阅读,如发现有疑问、不详和矛盾之处,请立即与招标人及时联系。
MQ门机说明书样本
目次1. 用途及特点1.1 用途1.2 主要特点2. 工作性能及主要技术数据2.1 起重性能2.2 变幅性能2.3 回转性能2.4 行走性能2.5 电源及电动机2.6 减速器及制动器2.7 钢丝绳2.8 重量2.9 最大运输单元2.10 使用地区条件3. 构造简介3.1 总体布置3.2 钢结构部分3.3 机构部分3.4 电气部分1、用途及特点1.1 用途MQ900/30/20/10t高架圆筒门机主要用于水利水电工程, 作混凝土吊运、浇筑和水工金属结构件等的吊装工作; 亦可用于火电厂的设备安装工程及组装场地的吊运工作。
1.2 主要特点1.在22~62m全幅度内, 额定起重量为10t, 起升范围125m( 其中轨上90m, 轨下35m) , 用于3m3砼吊罐的砼浇筑作业; 改变起重钢丝绳绕法后, 在22~40m 幅度内, 额定起重量为20t, 用于6m3砼吊罐的砼浇筑作业; 在最小幅度22m至幅度30m时, 安全起重量为30t, 最大起吊高度达90m, 可用以埋件及设备安装。
2.采用圆筒形高架塔身, 结构简单紧凑, 外形美观, 且风阻力小, 自重轻, 有利于起重机在较小轨距时的稳定性。
本机轨距为10.5m, 与国内现有门机通用。
3.采用大件分拆拼装结构, 减少安装工作量, 缩短安装时间。
4.起升机构采用直流调速系统, 变幅机构、回转机构和大车运行机构采用变频调速系统, 调速性能好, 运行平稳。
5.采用联动控制台操作并设有起重量及幅度指示、力矩保护等仪表, 便于司机操作。
6.采用管桁结构臂架, 具有自重轻、风载荷小、承载能力大、装拆方便等优点。
2、工作性能及主要技术数据2.1 起重性能注: 采用各种钢丝绳绕法时, 各工作幅度的额定起重量, 见起重特性曲线2.2 变幅性能最大工作幅度 62m最小工作幅度 22m变幅钢丝绳卷绕速度 30.1m/min吊重水平移动速度平均11.43m/min从最小幅度至最大幅度的变幅时间约3.5min2.3 回转性能回转速度0.075~0.75r/min( 浇筑)0.03~0.3r/min( 安装)回转角度 360全回转2.4 行走性能行走速度 2.2~22m/min轨距 10.5m基距 10.5m钢轨型号 QU80行走轮直径800mm踏面宽120mm主动轮8个从动轮8个最大垂直轮压工作状态470kN非工作状态358kN 最大侧向轮压 47kN2.5 电源及电动机2.5.1 电源2.5.2电动机2.6 减速器及制动器2.7 钢丝绳2.8 重量钢结构部分重量 160t机构部分重量 73t电器设备重量 4t自重 237t砼平衡重 80t全机总重约317t2.9 最大运输单元最长最重件—机台(中间梁部分) 12.45×3.58×2.0m 18.8t最长件—塔柱( Ⅱ) φ3.37×9.55m 14t超宽件—塔柱( Ⅰ) 3.5×3.5×2.65m 11.2t2.10 使用地区条件工作时允许最低温度 -20℃工作时允许最大风压 250N/m2使用地区最大地面风压 600N/m2使用地区海拔高度低于1000米3 构造简介3.1 总体布置本机采用直臂受压臂架, 钢丝绳变幅型式, 具有重量轻, 结构紧凑, 受力合理等优点。
门座式起重机

SANY JIB CRANE 三一门座式起重机
9 / 10
产品系列参数
齐全的产品系列,多种机型供您选择,我们的产品能适应不同港口码头及堆场的各种工 况。我们亦可按照码头、堆场实际情况为您定制,满足您个性化需求。
四连杆门座式起重机系列
额定起重量
16t
工作幅度
30m,33m,35m,37m
轨距
10.5m,12m,16m
组合臂架系统
组合臂架系统的水平位移落差小,使货物变幅运动更加平稳可靠,大大降低变幅过程中 的能量消耗。
能量回馈多传动电控系统
三一自主设计的大港机设备能量回馈电控系统采用有源前端整流模块,可以将重物下降 及机构制动时产生的势能反馈回电网,有效节约能源。同时系统带有线路滤波单元,用 于 抑 制 交 流 电 压 畸 变 以 及 消 除 高 次 电 流 谐 波 ( 电 压 谐 波 低 于 1%,谐 波 电 流 低 于 5%),避免对供电电网产生不良影响。采用IGBT整流单元,可以提高功率因数,节能 环保,降低运行成本。
16 16 / 四连杆 双起升 >6 10.5 10.5 7.5 25 15 15 250 26 1.5 50 35 60 380 50 电缆卷盘
SMQG1633S
A6
A8
/
17
53
13
9~33
9~33
9~23
16
25
16
/
四连杆
双起升
>6
10.5
10.5
8
25
15
15
250
26
1.5
50
35
60
380
50
电缆卷盘
四连杆门座式起重机
门式起重机结构
门式起重机的结构探析门式起重机广泛用于各种工矿企业、交通运输及建筑施工等部门的露天仓库、货场、车站、码头、建筑工地等露天场所,作为装卸与搬运货物、设备以及建筑构件安装等用。
门机是减轻笨重体力劳动,提高作业效率,实现安全生产的起重运输设备,可以在一定范围内垂直起升和水平移动物品.具有动作间歇性和作业循环性的特点,根据门式起重机的不同用选分为通用门式起重机、造船门式起重机和集装箱门式起重机等。
门式起重机主要由门架、小车、大车运行机构、操纵室、电气设各和央轨器等部分组成。
门式起重机的门架由主粱、左右支腿以及横粱构成。
与桥式起重机相比,门式起重机的主要特征是在桥架的一端或两端设有支腿,可直接支承在地基上或沿铺设在地面上的轨道运行,故称其为带腿的桥式起重机。
由于门式起重机可带悬臂,货物吊运和换装方便,不需要占地多、造价高的桥墩,场地面积能充分利用,因此在货场(铁路、码头)的货物装卸中,门式起重机比桥式起重机具有更多的优点。
1 门架的结构型式门式起重机的门架常采用板粱结构和桁架结构。
由于板梁结构制造方便.目前采用这种型式的门式起重机占多数,桁架结构多用于装卸桥。
门式起重机按门架的结构特点来分,有全门式、半门式、单悬臂门式、双悬臂门式等;按其主梁截面型式,可分为箱形单梁、箱形双梁、桁架双梁,万型截面桁架结构以及三角形桁架结构梁等;按主粱与支腿的连接方式,门架可分为两刚性支腿门架及一刚性支腿与一柔性支腿门架,柔性支腿与主梁可采用螺栓连接、柱型铰、球型铰连接。
单主梁门架的支腿常制成”l”型或”c”型,其截面型式也为箱形;双梁门架支腿制成”八”字型或”o”型等。
2 门式起重机尺寸参数确定原则2.1门式起重机的跨度和悬臂长度门式起重机的跨度是指大车行走轨道中心之间的距离。
跨度应根据使用条件和工艺要求而定,普通门式起重机的跨度取18~35m,此时主梁受温度影响及大车运行偏斜的影响相对小,采用刚性支腿,增大水平刚度有利于大车运行。
MQ 25-35门座起重机防风装置功效分析
MQ25-35门座起重机防风装置功效分析谢新鹏㊀刘相超龙口港集团有限公司㊀㊀摘㊀要:以MQ25-35门座起重机为研究对象,依据力学理论,拆分计算各防风装置的防风能力,探讨㊁分析工作状态和非工作状态的各类防风措施机制,提出科学合理门座式重机防风设计方案,确保门座起重机的生产安全㊂㊀㊀关键词:门座起重机;防风措施;防风能力Effect Analysis of Anti-wind Device of MQ25-35Portal CraneXie Xinpeng㊀Liu XiangchaoLongkou Port Group Co.,Ltd.㊀㊀Abstract:Taking MQ25-35portal crane as the research object,according to the mechanics theory,the performance of anti-wind of each anti-wind device is split and calculated,various anti-wind measures mechanism of working state and non-working state are discussed and analyzed,and a scientific and reasonable anti-wind design scheme of portal cranes is put forward to ensure the safety of portal cranes in production.㊀㊀Key words:portal crane;anti-wind measures;performance of anti-wind1㊀引言门座起重机(以下简称门机)是港口装卸作业的主力设备,由于其外形结构高大㊁迎风面积较大㊁风力作用中心高度较高,易受台风㊁突发性阵风等强对流天气影响,引发起重机械位移滑动㊁倾翻等灾难性事故,造成巨大的经济损失,甚至人员伤亡㊂因此,研究㊁优化门机防风措施功能及作用机制意义重大[1-2]㊂鉴于门机型号多㊁结构复杂㊁防风装置不统一,以MQ25-35门座起重机为研究对象,研究防风装置的防风能力和防风机制[3-4]㊂2㊀门机防风装置情况简介起重机结构高㊁自重大,一旦被风吹动将会产生很大惯性,难以停止,导致连锁机损和人身伤害事故[5-6]㊂因此门机在设计时,根据风载荷作用实际,配置多种防风装置,主要是为了防止门机整机失稳倾覆和沿轨道滑移㊂2.1㊀MQ25-35门机基本情况MQ25-35门机为普通四连杆式臂架㊁圆筒式门架的门座起重机,最大幅度35m,起升高度轨道上28m(吊钩)㊁轨道下16m,轨距L=10.5m,迎风面积S=262.9m2,风合力作用点距离地面高度H= 19.8m,自重G=430t㊂MQ25-35门机拥有制动器㊁防爬器㊁防风拉索㊁地锚(锚板)㊁防风楔块等防风装置㊂门机防风一般分两种情况,即工作状态的防风和非工作状态的防风㊂工作状态下制动器㊁防爬器㊁防风楔块发挥作用;非工作状态下,门机移动至指定位置锚定,此时所有防风装置均发挥作用[7-8]㊂2.2㊀制动器惯性制动器是目前国内门机上应用最广的行走制动器,通过对电动机轴的制动起到对门机行走主动轮的制动作用,在非工作状态下也可实现对主动轮的制动㊂在使用过程中及时更换制动器摩擦片㊁调整间隙,就可以取得较好的制动效果㊂惯性制动器无电气元件,使用安全可靠,安装㊁维护简便,摩擦材料磨损均匀,结构紧凑,无漏液㊁漏油㊂MQ25-35门机共有8套惯性制动器,主要技术参数见表1㊂表1㊀行走机构制动器主要技术参数制动器型号QGZ-P-03制动力矩T=365~458Nm传动比I=60.97车轮直径D550mm 2.3㊀防爬器MQ25-35门机共有4套防爬器(也称防跑制动器),位于行走台车之间㊂一旦行走轮有对轨道的相对运动,行走轮爬上楔面,门机自重力对楔块产生向下的正压力,在该作用力下,防爬器下面的齿板与轨道之间产生较大的水平摩擦力,阻止门机移动㊂正常情况下,在门机正压力(自重力)和摩擦力的作用04Port Operation㊀2021.No.2(Serial No.257)下,门机停止移动,超过安全临界点后门机将会滑动㊂静止状态下,防爬器不起作用㊂防爬器的效果取决于防爬器设计㊁使用维护和轨道(沉降)平整度㊂2.4㊀防风铁鞋港口常用的防风楔块(俗称铁鞋),由于其构造简单㊁重量轻㊁易于维修等优点,广泛应用于港口门机防风,但与防爬器不同的是需要人工手动操作㊂MQ25-35门机共有8个防风铁鞋,对向塞垫至行走轮下方㊂防风铁鞋作用原理与防爬器相同,车轮向前滚动时,爬到铁鞋上,与铁鞋成为一体在轨道上滑行,将车轮与轨道的滚动摩擦变为滑动摩擦,因而摩擦力大幅度增加㊂在门机不移动的情况下,防风铁鞋也不起作用㊂2.5㊀防风拉索MQ25-35门机共有4根防风拉索㊂防风拉索是指用钢丝绳(铁链)㊁花篮螺丝㊁卸扣等,将门机机体与码头的锚定座链接起来,将门机固定在封车位置,避免在风力作用下门机移动㊂防风拉索具有直接可靠㊁效果易于检查和防风能力强等优点,其缺点是必须将门机停到指定位置,加固时间长㊂2.6㊀防风锚定MQ25-35门机共有2套地锚㊂防风锚定与防风拉索同样具备直观可靠㊁效果易于检查和防风能力强等优点,其缺点是必须将门机停放到指定位置,需要准确定位,耗时也较长㊂同时在锚板与地锚槽之间有间隙,只有当锚板碰到地锚槽,该装置才发生作用,若门机防风拉索拉紧,门机无法移动的情况下,该装置不起作用㊂3㊀门机抗倾覆能力计算与分析根据规定,港口起重机非工作状态下的抗风能力应不小于55m /s,工作状态下的抗风能力应不小于35m /s㊂[9]假设门机完全处于静止状态,无任何防风装置起作用㊂当风速为55m /s,风向完全垂直轨道,则风压为:Q =0.613V 2=1854.325Pa(1)式中,Q 为风压,Pa;V 为风速,m /s;则门机受到最大的倾覆力为:F =1.2QS =1.2ˑ1854.325ˑ262.9=585.002kN (2)式中,F 为门机受到最大的倾覆力,kN;Q 为风压,Pa;S 为门机迎风面面积,m 2㊂门机受到的倾覆力矩为:T 倾覆=FH =584.9ˑ19.8=11583.04kNm(3)式中,T 倾覆为门机受到的倾覆力矩,kNm;H 为门机高度,m㊂稳定力矩为:T 稳定=M g(L /2-X )=18752.3kNm (4)式中,T 稳定为稳定力矩,kNm;M 为门机的质量,kg;g为重力加速度,m /s 2;L 为门机宽度,m;X 为门机垂直于轨道方向时的重心偏移量,m㊂门机转向㊁幅度不同,X 取值不同㊂式中X 为门机最不利时的重心偏移量,一般情况下变幅最大时X 为0,考虑合理范围内门机幅度最小时X 取值为0.8m㊂安全系数为:σ=T 稳定/T 倾覆=18752.3/11583.04=1.619(5)㊀㊀从上述计算可知,在静态(且风力完全垂直于轨道方向)情况下,即使受到55m /s 的强风,门机也不会倾覆㊂但分析国内外门机倾覆事故,绝大部分事故是门机在风力作用下或人为原因发生移动,巨大的滑移惯性冲击造成的㊂因此,门机防风的重点应是防止风力吹动门机沿轨道滑动,尤其考虑门机在装卸作业过程中遭遇强阵风侵袭的防范㊂4㊀门机抗水平滑移力的计算与分析4.1㊀制动器防风能力F 1依据表1行走机构制动器主要技术参数,可以计算出1个制动器工作时,制动车轮所受到的最大制动力,即1个制动器能提供的防风能力F 0:F 0=2TI /D (6)式中,F 0为制动器能提供的防风能力,kN;T 为制动器的制动力矩,kNm;I 为行走机构的总传动比;D 为行走轮直径,m㊂经计算1个制动器能提供的的防风能力为:F 0=2ˑ458ˑ60.97/0.55=100kN (7)㊀㊀每个制动器控制2个行走轮,若制动器工作时,行走轮恰好滚动,每车轮最小的轮压应为:F 轮压=F 0/(2μ)(8)式中,F 轮压为车轮轮压,kN;μ为制动轮和轨道之间的摩擦系数,参照‘起重机设计规范“(GB /T3811-2008),取0.14㊂[10]计算可得:F 轮压=100/(2ˑ0.14)=357kN (9)㊀㊀当制动车轮的轮压小于357kN 时,制动力矩足够大,车轮发生滑动而非滚动㊂该门机共32个行走轮(其中16个主动轮,16个从动轮),可以计算出每个车轮轮压为134kN,远小于使车轮滚动的最小轮压,主动轮与轨道之间是滑动摩擦㊂因此,制动器对应车轮的最大静摩擦力即为该制动器的防风能力F 1:F 1=N 1GμN(10)14港口装卸㊀2021年第2期(总第257期)式中,F 1为制动器防风能力,kN;N 1为制动轮(主动轮)数量;N 为全部行走轮数量㊂计算可得:F 1=16/32ˑ430ˑ0.14=30.1t =301kN (11)4.2㊀防爬器防风能力F 2防爬器能提供的最大静摩擦力,即防风能力F 2:F 2=N 2Gμ1N(12)式中,F 2为防爬器防风能力,kN;N 2为门机移动方向上,爬上楔面的行走轮数量;N 为全部行走轮数量;μ1为制动轮和轨道之间的摩擦系数,取0.25㊂F 2=2/32ˑ430ˑ0.25=6.7t =67kN (13)㊀㊀该计算的前提条件为门机在风力的作用下,行走轮爬上了楔面重心抬高㊂而实际上,行走轮爬上楔面或对楔面产生正压力,需要移动一短距离,一般在5~10mm;且由于风向㊁风力的复杂多变性,再考虑风的上拔力,实际数值应比该数小㊂[11]4.3㊀防风铁鞋防风能力F 3铁鞋塞至门机行走台车主动轮下方时,根据制动器F 1计算,主动轮与轨道是滑动而非滚动,门机主动轮无法爬上铁鞋楔面,防风铁鞋不能发挥防风功能,该铁鞋防风阻力基本为零㊂铁鞋塞至门机行走台车从动轮下方时,受风载荷影响,门机沿轨道移动,从动轮滚动爬上铁鞋楔面,将从动轮的滚动摩擦变成滑动摩擦,增加起重机自身的摩擦阻力㊂铁鞋使用时,应规范塞至门机行走台车从动轮下方,防爬器也应设置对从动轮作用㊂[12]MQ25-35门机共配备8个防风铁鞋,对向塞垫至从动轮下方㊂当门机滑移时,门机移动方向上4个铁鞋发挥防风功能㊂防风铁鞋的防风能力即受到的最大静摩擦力,取防风铁鞋与轨道之间的摩擦系数为0.1计算得:F 3=4/32ˑ430ˑ0.1=5.375t =53.75kN (14)4.4㊀地锚防风能力F 4地锚的抗风能力即为锚板的水平组合力,MQ25-35门机有2处防风锚定,共4块锚板,锚板的水平组合力F 4为:F 4=4S 锚板F 剪切应力=4ˑ30ˑ180ˑ128=2764kN (15)式中,S 锚板为锚板截面积,m 2;F 剪切应力为锚板剪切应力,kN;该锚定不考虑门机受到的上拔力[13]㊂4.5㊀防风拉索防风能力F 5防风拉索一般设置为与垂直方向有一定的夹角,既能限制门机水平滑移,又能防止上拔力倾覆门机㊂MQ25-35设计的防风拉索受力图见图1㊂图1㊀MQ25-35门机防风拉索受力图图1中L 为防风拉索长度,α㊁β分别为拉风拉索与水平面和轨道方向的夹角,H 为防风拉索门机固定点高度,防风拉索的抗风水平分力见表2㊂表2㊀防风拉索的抗风水平分力防风钢丝绳规格1根钢丝绳的抗拉水平力/kN实际水平力(两根按平衡系统70%计算)/kN6ˑ37-282753855㊀风速㊁风力与门机防风装置功效下面就不同风速㊁风力条件下,各种防风装置的功效进行分析㊂5.1㊀工作状态下防风措施安全系数及分析根据交通部规定,港口起重机工作状态下的抗风能力应大于或等于35m /s,对门机制动器㊁防爬器㊁铁鞋3项防风措施进行单项和组合安全系数计算(见表3)㊂根据门机设计安全系数1.4,该门机任一单项均不符合防风安全要求,应采取 制动器+防爬器 ㊁ 制动器+铁鞋 或 制动器+防爬器+铁鞋表3㊀工作状态下防风措施安全系数风速/(m ㊃s -1)风力/级门机最大水平滑移力/kN 单项防风措施安全系数组合防风措施安全系数制动器防爬器铁鞋防爬器+铁鞋制动器+防爬器制动器+铁鞋制动器+防爬器+铁鞋10.7522.1413.32 2.97 2.38 5.3416.2915.7018.6713.8636.838.01 1.78 1.43 3.219.799.4411.2217.1756.55 5.22 1.160.93 2.09 6.38 6.157.3120.5881.27 3.630.810.65 1.46 4.44 4.28 5.0924.79117.98 2.500.560.45 1.00 3.06 2.95 3.5028.510157.08 1.880.420.340.75 2.30 2.21 2.6332.611205.52 1.440.320.260.58 1.75 1.69 2.013512236.901.250.280.220.501.52 1.47 1.7424Port Operation㊀2021.No.2(Serial No.257)的组合防风安全措施㊂考虑防风措施落实便捷程度及效能,工作状态下门机优先采取 制动器+防爬器 方案,在条件许可的情况下,再塞垫铁鞋㊂作业状态门机遭遇强阵风,当阵风不高于35m /s 时,依靠组合防风措施能够有效应对;当阵风高于35m /s(12级)时,应采取就地封车㊁包桩系缆等方式应对,不得采取移动门机封车的方式㊂工作状态门机防风措施中,制动器至少提供71.3%防风阻力,是防止门机沿轨道滑移安全的关键装置㊂但门机实际工作时,货物载荷的冲击会使门机产生晃动,长期作业将造成门机制动效果下降,因此,定期检查维护调整行走制动器,保持制动器状态良好非常重要㊂5.2㊀非作业状态下防风措施安全系数及分析非作业状态门机,驶回锚定位,一般采取制动器㊁防爬器㊁铁鞋㊁防风拉索㊁地锚等5种措施进行防护,其单项和组合安全系数计算见表4㊂表4㊀非工作状态下防风措施安全系数风速/(m ㊃s -1)风力/级门机最大水平滑移力/kN 单项防风措施系数组合防风措施系数制动器防爬器铁鞋防风拉索地锚制动器+防爬器+铁鞋制动器+防爬器+防风拉索制动器+防爬器+铁鞋+防风拉索制动器+防爬器+地锚20.5881.27 3.630.810.65 4.6434.01 5.099.089.7331.4524.79117.98 2.500.560.45 3.2023.42 3.50 6.25 6.7021.6628.510157.08 1.880.420.34 2.4017.59 2.63 4.70 5.0316.2732.611205.52 1.440.320.26 1.8413.44 2.01 3.59 3.8512.443512236.90 1.250.280.22 1.5911.66 1.74 3.12 3.3410.7955.00飓风585.000.500.110.090.64 4.720.71 1.26 1.35 4.3790.00-1566.430.190.040.030.241.760.260.470.501.63㊀㊀备注:安全系数大于1.4,即在该风速下,采取对应措施,门机防风安全㊂㊀㊀分析表4可得,根据门机设计安全系数1.4,非工作状态下的门机,地锚是最有效的防止门机滑移措施,单项可最高防90m /s 风速,其他制动器㊁防爬器㊁铁鞋㊁防风拉索4种单项和组合防风措施不能防范55m /s 风速㊂因此,MQ25-35门机必须配备地锚,并落实地锚防风措施㊂6㊀结语基于对MQ25-35门机防风装置的分析,提出了科学合理的防风装置配置模式,确保了门机在工作状态和非工作状态下的防风安全性㊂港口企业应加强对门机制动器㊁地锚㊁防爬器㊁铁鞋及防风拉索等防风装置的维护保养,保证其性能良好㊁动作可靠;同时加强员工培训教育,提高员工对门机防风能力的认知,明确门机防风的风险点和防控措施,清楚门机防风应急措施,掌握各类装置的检查㊁维护和操作要求,进一步保障门机安全㊂参考文献[1]㊀胡浩亮,张志坚,柯韬,等.港口起重机风灾事故机理研究[J].起重运输机械,2016(12):87-92.[2]㊀蒋欣祎.浅析港口装卸作业起重机的防滑抗风装置[J].江苏科技信息,2014(8):64-65.[3]㊀李娜,胡吉全.港口门座起重机防风装置的计算与选择[J].港口装卸,2007(2):8-10.[4]㊀蒋国仁.港口起重机械[M].大连:大连海事大学出版社,1995.[5]㊀闵文,褚文俊.材料力学[M].西安:西安交通大学出版社.2009.[6]㊀颜慧珍.钢丝绳的伸长率与预张拉技术[J].金属制品,2006(5):11-13.[7]㊀陈建辉,梁益龙,黄忠渠.钢丝绳结构性伸长问题研究[J].贵州工业大学学报(自然科学版),2006(1):77-79.[8]㊀交通运输部办公厅.港口大型机械防阵风防台风安全工作指南[S].2018.[9]㊀中华人民共和国交通部.港口大型机械防阵风防台风管理规定(交通部令2003年第3号)[S].2003.[10]中华人民共和国国家质量监督检验检疫总局.起重机设计规范(GB /T3811-2008)[S].2009.[11]王宝君.门座起重机防风安全能力提升的措施[J].设备管理与维修,2020(18):144-146.[12]丛培状.浅谈港口大型装卸机械的防风装置[J].中国特种设备安全,2009(1):13-15.[13]张志坚,岑志波,陈峰,等.2535门座起重机抗风防护装置理论防风能力估算[J].建设机械技术与管理,2018,31(10):66-69.谢新鹏:265700,烟台龙口市环海中路1899号收稿日期:2020-11-27DOI:10.3963/j.issn.1000-8969.2021.02.01434港口装卸㊀2021年第2期(总第257期)。
MQ2535门座式起重机结构简介
MQ2535门座式起重机结构简介
门座式起重机简称门机,它由门型金属结构(门架)而得名。
门座式起重机属大型电动超重机,它是现代化港口和船厂机能作业的重要设备之一。
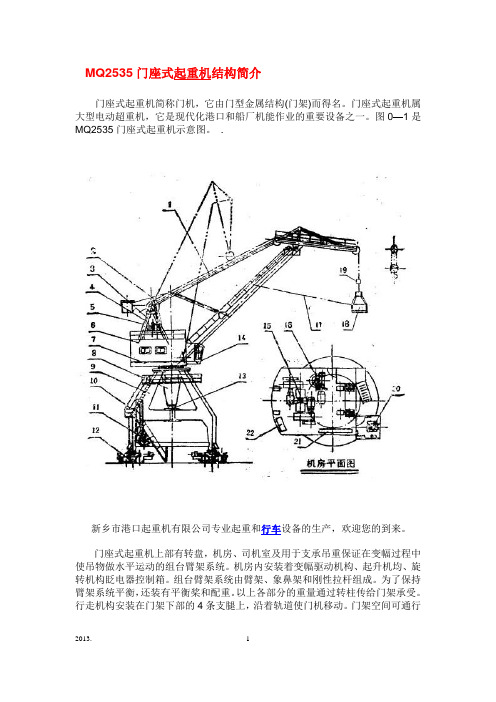
图0—1是MQ2535门座式起重机示意图。
.
新乡市港口起重机有限公司专业起重和行车设备的生产,欢迎您的到来。
门座式起重机上部有转盘,机房、司机室及用于支承吊重保证在变幅过程中使吊物做水平运动的组台臂架系统。
机房内安装着变幅驱动机构、起升机均、旋转机构眨电器控制箱。
组台臂架系统由臂架、象鼻架和刚性拉杆组成。
为了保持臂架系统平衡,还装有平衡桨和配重。
以上各部分的重量通过转柱传给门架承受。
行走机构安装在门架下部的4条支腿上,沿着轨道使门机移动。
门架空间可通行
车辆。
门机的旋转机构能使门机作360°旋转。
起升、旋转、变幅3个机构可单独或联合作业。
梯子、平台、门架、机房,司机室、转柱、转盘、组合臂架系统和人字帮总称门机的金属结构,它与门机起升、变幅、回转、行走等4大机构,以及供电、操作系统,安全装置蛆成一台完整的门机整体。
近几年生产的门机,其主要的金属结构部件入门架,转柱,臂架都采用箱式结构,通常用的门机分为通用门座式和专用门座式两种,通用门座式是用吊钩(或抓斗)装卸货物和吊重,专用门座式的只能用于某一种货物的调运。
MQ2533门座式起重机力矩限制器的研究及结构改造
第 11 卷 2011 年第7期 7月中 国 水 运 Chi na W er Tr a ns por t atVol . 11 J ul yNo. 7 2011MQ2533 门 座 式 起 重 机 力 矩 限 制 器 的 研 究 及 结 构 改 造李华山,程永荣(日照港集团岚山港务有限公司,山东 日照 276800) 摘 要:门座式起重机在工作时,必须利用力矩 限制器进行工况和安全监控。
通过分析、研究在产门机力矩限制出现的实际问题,最大化地利用现有技术、生产和设计能力,实现门机技改项目经济性和安全性的双保险。
关键词:门座式起重机;力矩限制器;技改;经济和安全 中图分类号:TH 703. 64 一、引言 门座式起重机 在工作时,需根据现场实际 情况而经常改 变工况进行起重作业,如改变起吊角(幅度) 、起吊臂长等, 而 在不同 工况 参数 下所 能起 吊的 最大额 定起 重量 及工 作最 大、最小变幅 是相应不同的,因此需要一 套装置对以上参数 综合监测判断 ,作出起重机正常工作、满 载、超载、变幅超上限、变幅超 下限等工作状态的指示并相 应报警、提示、控文献标识码:A文章编号:1006- 7973(2011)07- 0095- 03 三、Q2533 门座式起重机力矩限制器的改造背景 上海信达机械有限公司 20 06 年生产的部分门机起重力 矩限制器采用了 Lx-w 型起重力矩限制器,该限制器具有预 报警,延 时报警和立即报警、自动切断 起重设备上升控制回 路和同步 显示起重物重量、幅度、高度 以及当前额定起重量 等功能, 可有效的避免起重设备因超载造成设备及人身事故,对起重安全生产具有极其重要的意义。
制,以保证起重机械的正常工作。
门座式起重机 力矩限制器就是应上述要求 ,应用于门座 式起重机的安 全保护装置。
笔者在总结公 司系列产品起重机 力矩限制器使 用经验的基础上,结合生产 实际,对出现的问 题做了技术改 造,并对门座式起重机力矩 限制器在门座起重 机的应用和安全使用提出一孔之见。
门座起重机详解-参考
6.司机室。司机室置于转盘右前端,框架主体用翼型方钢管焊 接而成,外壁覆盖 Q235 薄钢板,内壁用装饰板和铝合金嵌条镶固定, 中间装有 50 毫米厚度的泡沫塑料隔热层,前上方有塑钢玻璃移窗及 活动遮阳窗帘,前方及两侧为塑钢框移窗。钢质移门布置在后方,在 右后侧墙壁上装有冷热空调机,并配有冬天用暖风机。
左抓斗绳 左提斗绳 平衡粱
撑杆
快速接扣 右抓斗绳 右提斗绳
滑轮
鄂板 刃口
门机分为四大机构包括(起升机构、变幅机构、旋转机构、行走 机构),其中前三个机构为工作机构,行走机构为非工作机构。门机 采用转盘式回转支承装置。臂架系统、平衡梁系统、人字架、机器房、 司机室等安装在转台上,转台由滚动元件支撑着。这样装在门架上部
8
支持机减速箱
开闭机卷筒
支持机卷筒
开闭机减速箱
起升减速箱高速轴油封
电机接线盒
电机吊耳
钢丝绳压板
开闭机变频电
钢丝绳 起升高度限位控制
起升连轴节
起升制动器
液压推动器
制动刹车盘
刹车榖
起升压绳器 放油口
9
4.臂架及臂架平衡系统。 本起重机的臂架系统为四连杆系统,包括变幅大臂、象鼻梁、
大拉杆、小拉杆四大部分。臂架平衡系统为杠杆式平衡梁方式,它包 括平衡梁、配重及与大臂连接的小拉杆组成。由于应用电子计算机代 替人工计算和作图,系统几何尺寸得到优化,使整个变幅过程、货物 及臂架系统合成重心沿近似水平线移动。系统各构件均为箱形结构, 起重臂、象鼻梁、大拉杆、均为铰接联接。各铰点均装有滑动轴承, 各主要构件都设有梯子、走道,铰接点还设有供维修检查用的平台。 平时要经常检查结构件的铰点处焊缝和母材状况,发现有开焊、开裂 或局部失稳的情况时采取相应措施。
25T-37M门座式起重机参数规格书

日照港岚北港务有限公司25T-37M门座式起重机技术规格书第一章概述1.1 总则 (4)1.2 安装地点 (5)1.3 设计制造标准 (5)1.4 工作条件 (6)1.5 起重机工作级别 (7)1.6 稳定性 (8)1.7 主要技术参数 (8)1.8 供货范围 (9)1.9 供货方式、交货期 (10)第二章结构2.1 一般要求 (11)2.2 材料 (11)2.3 金属结构制造工艺 (11)2.4 臂架、门架、主梁和端梁 (13)2.5 四连杆机构和人字架 (14)2.6 平台、通道、阶梯和直梯 (14)2.7 机房 (14)2.8 电气房 (15)2.9 高压室 (16)2.10 司机室 (16)第三章工作机构3.1 一般要求 (19)3.2 一般机械零部件 (20)3.3 起升机构 (23)3.4 变幅机构 (24)3.5 旋转机构 (25)3.6 行走机构 (26)3.7 安全连锁保护装置 (27)3.8 润滑系统 (29)第四章电气与控制4.1 电气系统一般准则 (30)4.2 供配电系统 (30)4.3 主要电气设备 (33)4.4 司机室操作 (35)4.5 配电屏与控制屏、柜与端子 (35)4.6 电缆和电缆敷设 (36)4.7 照明 (37)4.8 接地和防雷 (38)4.9 起重机监控管理系统(CMS) (38)第五章通信5.1 有线电话通信 (42)5.2 无线电话对讲机 (42)5.3 扩音设备 (42)第六章涂装6.1 预处理和底漆 (43)6.2 油漆厚度 (44)第七章标记和铭牌、起重机基本配置和备品备件7.1 标记和铭牌 (45)7.2 起重机基本配置 (46)7.3 备品和备件 (47)第八章项目管理和相关要求8.1 设计审查及图纸资料 (49)8.2 竣工图和最终技术文件 (51)8.3 监造 (53)8.4 培训 (55)第九章安装、调试和验收9.1 运输 (55)9.2 现场安装调试 (56)9.3 起重机的最终验收 (58)第一章概述本技术规格书其内容明确本次招标的起重机基本的技术要求和确保这些基本技术要求所必须的相关条款,并非起重机的所有细节,投标人应仔细阅读,如发现有疑问、不详和矛盾之处,请立即与招标人及时联系。
门机结构简介及电气设计
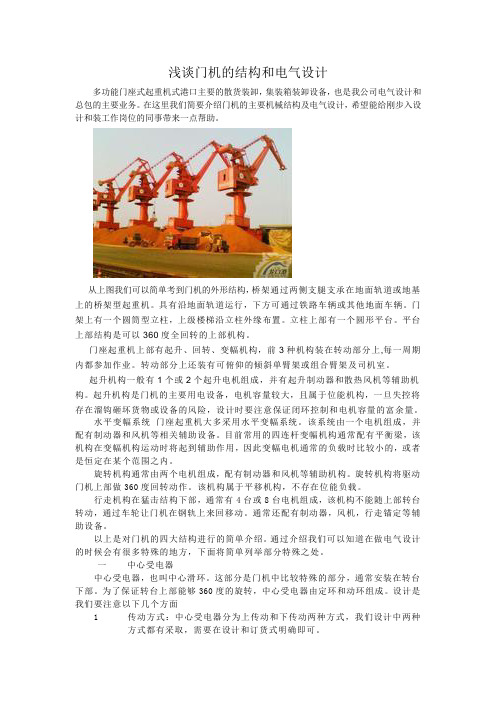
浅谈门机的结构和电气设计多功能门座式起重机式港口主要的散货装卸,集装箱装卸设备,也是我公司电气设计和总包的主要业务。
在这里我们简要介绍门机的主要机械结构及电气设计,希望能给刚步入设计和装工作岗位的同事带来一点帮助。
从上图我们可以简单考到门机的外形结构,桥架通过两侧支腿支承在地面轨道或地基上的桥架型起重机。
具有沿地面轨道运行,下方可通过铁路车辆或其他地面车辆。
门架上有一个圆筒型立柱,上级楼梯沿立柱外缘布置。
立柱上部有一个圆形平台。
平台上部结构是可以360度全回转的上部机构。
门座起重机上部有起升、回转、变幅机构,前3种机构装在转动部分上,每一周期内都参加作业。
转动部分上还装有可俯仰的倾斜单臂架或组合臂架及司机室。
起升机构一般有1个或2个起升电机组成,并有起升制动器和散热风机等辅助机构。
起升机构是门机的主要用电设备,电机容量较大,且属于位能机构,一旦失控将存在溜钩砸坏货物或设备的风险,设计时要注意保证闭环控制和电机容量的富余量。
水平变幅系统门座起重机大多采用水平变幅系统。
该系统由一个电机组成,并配有制动器和风机等相关辅助设备。
目前常用的四连杆变幅机构通常配有平衡梁,该机构在变幅机构运动时将起到辅助作用,因此变幅电机通常的负载时比较小的,或者是恒定在某个范围之内。
旋转机构通常由两个电机组成,配有制动器和风机等辅助机构。
旋转机构将驱动门机上部做360度回转动作。
该机构属于平移机构,不存在位能负载。
行走机构在猛击结构下部,通常有4台或8台电机组成,该机构不能随上部转台转动,通过车轮让门机在钢轨上来回移动。
通常还配有制动器,风机,行走锚定等辅助设备。
以上是对门机的四大结构进行的简单介绍。
通过介绍我们可以知道在做电气设计的时候会有很多特殊的地方,下面将简单列举部分特殊之处。
一中心受电器中心受电器,也叫中心滑环。
这部分是门机中比较特殊的部分,通常安装在转台下部。
为了保证转台上部能够360度的旋转,中心受电器由定环和动环组成。
门机基本结构讲解

臂架系统 起重臂系统是四连杆结构, 并有平衡系统,以使货物和臂 架及平衡系统的重心在变幅过 程中作水平移动的特性。 起重臂、象鼻梁、大拉杆、 均为铰接联接。各铰点均装有 滚动轴承。 臂架系统中有梯子平台, 通往臂架的各铰点处和滑轮位 置便于检查和维修工作,平时 要经常检查结构件的铰点处焊 缝和母材状况,发现有开焊、 开裂或局部失稳的情况时采取 相应措施。
小齿轮齿数
齿条齿数 型号
12
60 YPZ2-500Ⅱ/Ed80/6-MK1S-左 (右) 3930 N·m Φ 500 mm 电力液压推杆
制动器
制动力矩 制动轮直径 操作方式
一、减速器 变幅机构的减速器采用的是德国SEW传动机械公司生产的硬 齿面减速器,减速器的型号是4C390NE-160-13,传动比为160, 出轴形式13;在使用过程中定期检查减速器的润滑油,并按本 说明书要求定期进行更换。 二、电动机 变幅机构的电动机是大连天元厂生产的变频电动机,电动 机的型号为YZP2280S-6,电动机的功率为55kw,该电机具有启动 平稳,冲击小等优点,使变幅机构工作时无严重冲击和异常响 声,振动小,运动平稳,工作可靠。
门机基本机构讲解
本起重机用吊钩或抓斗作业,主 要用于港口码头装卸散货和件杂货。 该机结构是四连杆臂架系统,货物在 变幅过程中水平移动,平衡系统采用 杠杆系统,使变幅平稳,并降低了变 幅所需功率。 本机主要包括四大机构,即 起升、变幅、旋转和行走机构,四大 机构全部采用交流变频器装置调速控 制,整机采用GE90-30的PLC控制,使 各个机构具有良好的调速性能,工作 时无严重冲击和异常响声,振动小, 运动平稳,工作可靠。变幅机构采用 齿条变幅,结构简单,传动可靠。旋 转机构采用立式行星减速器和齿轮传 动。起升机构是相同的两套卷扬装置, 它们可以分别动作或共同动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MQ2535门座式起重机结构简介
门座式起重机简称门机,它由门型金属结构(门架)而得名。
门座式起重机属大型电动超重机,它是现代化港口和船厂机能作业的重要设备之一。
图0—1是MQ2535门座式起重机示意图。
.
新乡市港口起重机有限公司专业起重和行车设备的生产,欢迎您的到来。
门座式起重机上部有转盘,机房、司机室及用于支承吊重保证在变幅过程中使吊物做水平运动的组台臂架系统。
机房内安装着变幅驱动机构、起升机均、旋转机构眨电器控制箱。
组台臂架系统由臂架、象鼻架和刚性拉杆组成。
为了保持臂架系统平衡,还装有平衡桨和配重。
以上各部分的重量通过转柱传给门架承受。
行走机构安装在门架下部的4条支腿上,沿着轨道使门机移动。
门架空间可通行
车辆。
门机的旋转机构能使门机作360°旋转。
起升、旋转、变幅3个机构可单独或联合作业。
梯子、平台、门架、机房,司机室、转柱、转盘、组合臂架系统和人字帮总称门机的金属结构,它与门机起升、变幅、回转、行走等4大机构,以及供电、操作系统,安全装置蛆成一台完整的门机整体。
近几年生产的门机,其主要的金属结构部件入门架,转柱,臂架都采用箱式结构,通常用的门机分为通用门座式和专用门座式两种,通用门座式是用吊钩(或抓斗)装卸货物和吊重,专用门座式的只能用于某一种货物的调运。