(结构动力学)多自由度体系讲义运动方程
合集下载
第二章结构动力学分析动力学基础及运动方程的建立
1 (t ) c1 c2 m1 0 u 2 (t ) c2 0 m2 u 1 k1 k 2 c2 u 2 k2 c2 u k 2 u1 0 k 2 u 2
K u P M u
动力平衡法的步骤
1)分析体系各质点所受的真实力和假想惯性力; 2)沿质点各自由度方向列出平衡方程。
动力平衡法的优点
把动力问题变成了人们所熟悉的静力问题。
2.2 运动方程的建立
2.2.2 虚位移原理
虚位移原理:如果一个平衡的体系在一组力的作用 下承受一个虚位移,即体系约束所允许的任何微小 位移,则这些力所作的总功等于零。 虚位移:满足体系约束条件的无限小位移。 理想约束:在任意虚位移下,约束反力所作虚功之 和等于零。
描述体系在运动过程中任意时刻全部质点的位置所需要的独 立几何参数的数目。
y2
y1
平面上的质点 W=2
非刚性悬臂 W=2
EI
刚性梁 W=1
四层结构 W=4
图2.1 动力自由度的确定
几个值得注意的问题
1. 弹性体系的振动自由度
描述体系的振动,需要确定体系中全部质量在任一瞬 时的位置,为此所需要的独立坐标数就是弹性体系振动的 自由度。值得注意的是:体系中集中质量的个数不一定等 于体系振动的自由度,自由度数目与计算假定有关,而与 集中质量数目和超静定次数无关。
d T T V ( ) Q j (t ) , j 1, 2, , n dt q j q j q j
t2
t1
(T V )dt
t2
t1
Wnc d建立体系的运动方程 体系的动能
T
1 2 12 m2 u 2 m1u 2
K u P M u
动力平衡法的步骤
1)分析体系各质点所受的真实力和假想惯性力; 2)沿质点各自由度方向列出平衡方程。
动力平衡法的优点
把动力问题变成了人们所熟悉的静力问题。
2.2 运动方程的建立
2.2.2 虚位移原理
虚位移原理:如果一个平衡的体系在一组力的作用 下承受一个虚位移,即体系约束所允许的任何微小 位移,则这些力所作的总功等于零。 虚位移:满足体系约束条件的无限小位移。 理想约束:在任意虚位移下,约束反力所作虚功之 和等于零。
描述体系在运动过程中任意时刻全部质点的位置所需要的独 立几何参数的数目。
y2
y1
平面上的质点 W=2
非刚性悬臂 W=2
EI
刚性梁 W=1
四层结构 W=4
图2.1 动力自由度的确定
几个值得注意的问题
1. 弹性体系的振动自由度
描述体系的振动,需要确定体系中全部质量在任一瞬 时的位置,为此所需要的独立坐标数就是弹性体系振动的 自由度。值得注意的是:体系中集中质量的个数不一定等 于体系振动的自由度,自由度数目与计算假定有关,而与 集中质量数目和超静定次数无关。
d T T V ( ) Q j (t ) , j 1, 2, , n dt q j q j q j
t2
t1
(T V )dt
t2
t1
Wnc d建立体系的运动方程 体系的动能
T
1 2 12 m2 u 2 m1u 2
结构动力学多自由度系统振动

运用功旳互等原理可知,刚度矩阵是对称阵,即有kij=kji, 于是上述刚度矩阵为:
k1 k2
k2
K 0
0
0
k2 k2 k3
k3 0
0
0 k3 k3 k4 k4
0
0 0 k4 k4 k5 k5
0
0
0
k5
k5
⒉ 柔度法 柔度系数aij定义为:
在第j个质量上作用单位力时在第i个质量上产生旳位移。
K12 k2 K22 k2 k3
K32 k3 K42 0 K52 0
K13 0 K23 k3 K33 k3 k4 K43 k4 K53 0
K14 0 K24 0 K34 k4 K44 k4 k5 K54 k5
K15 0 K25 0 K35 0 K45 k5 K55 k5
(a) m1 mi
mj mn
y1
yi yj yn
m1 y1
(b)
mi yi
1
i
j
m j y j
mn yn
ii
ji
1
(c)
ij
ij
jj
(a) m1
mi
mj mn
y1
yi yj yn
m1 y1
(b)
mi yi
1
i
j
m j y j
mn yn
ii
ji
1
(c)
ij
ij
jj
于是: 若在第j个质量上作用有力F,则在第i个质量上产
2
2
2
1 Mx 2 1 m[x 2 2Lx cos L2 2 ] 1 kx2 mgL(1 cos)
2
2
2
d dt
结构力学专题十三(多自由度体系的动力计算)
FP1
m1
l
EI
l
FP 2
m2
l
二、任意荷载作用*
运动方程: M y(t) Ky(t) FP (t) (a)
1、主振型矩阵
1 2 n
2、广义质量、广义刚度
} M * T M 对角阵
K* T K
3、正则坐标
y(t) (t)
(b)
M y(t) Ky(t) FP(t) (a)
4、振型迭加法分析强迫振动
例1:求图示结构的动位移幅值和动内力幅值。
k1 k,k2 2k,
m1
m1 m,m2 2m;
P0 sin t
EI1
k1 m2
h
已知:
2
k m
EI1
k2
h
A
P0 k
1 0
1
1
I
F
0P0
P0
P0
P0 k
动位移幅值图
动荷载图(虚拟)
例2:求图示结构的动位移幅值和动内力幅值。
已知:
i
(t
)
i
(0)
cos
it
i (0) i
sin
it
(i 1, 2)
l
0E.I041
P0 L3 EI
sinP0 stin
m
t
EI
从以上例题的计算中可看出,一般情况下 1l 〉2 〉l〉n
故在振型迭加法中,一般是前几阶振型起主要作用。
思考:用振型叠加法求例1所示结构的位移幅值。
2
k m
2
1 3
k m
2 5 k 3m
2
k m
P0 sin t
P0 sin t
【结构动力学】第10章 多自由度体系2020

0
0
N
其中,ωn— 第n阶自振频率,{φ}n—第 n阶振型。
[Φ]和[Ω]也分别称为振型矩阵和谱矩阵。
13
5 DOF with uniform mass and stiffness
5 DOF Base Isolated 14
15
5 DOF with uniform mass and stiffness
k22 2m22 k2N 2m2n 0
k N1 2mN1 k N 2 2mN 2 k NN 2mNN
10
对于N个自由度的稳定结构体系,频率方程是关于ω2的 N次方程,
a N ( 2 ) N a N 1 ( 2 ) N 1 a1 2 a 0 0
由此可以解得N个正实根(ω12<ω22<ω32…<ωN2)。 ωn(n=1, 2, …, N)即为体系的自振频率。其中量值最小的 频率ω1叫基本频率(相应的周期T1=2π/ω1叫基本周期)。 从以上分析可知,多自由度体系只能按一些特定的频 率即按自振频率做自由振动。按某一自振频率振动时,结 构将保持一固定的形状,称为自振振型,或简称振型。
上述齐次方程组有非零解条件为:系数行列式为零
A [I ] 0
N×N矩阵[A]一般将有N个特征值,对应N个特征向量
6
§10-2 多自由度体系的自由振动
多自由度体系无阻尼自由振动的方程为:
M u K u 0
其中:[M]、[K]为N×N阶的质量和刚度矩阵 {u}和{ü}是N阶位移和加速度向量 {0}是N阶零向量
11
把相应的自振频率ωn代入运动方程的特征方程得到振型
K n 2 M n 0
{φ}n={φ1n, φ2n , …, φNn }T—体系的第n阶振型 。 ➢ 由于特征方程的齐次性(线性方程组是线性相关的),振型向量 是不定的,只有人为给定向量中的某一值,例如令φ1n=1,才能确 定其余的值。 ➢ 实际求解时就是令振型向量中的某一分量取定值后才能求解。 虽然令不同的分量等于不同的量,得到的振型在量值上会不一样, 但其比例关系是不变的。
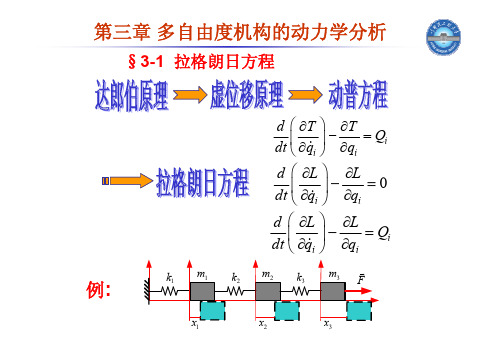
第三章多自由度机构的动力学分析
1
M3
M6
Q1 M 1 , Q2 M 3 , Q3 M 6
广义力用虚功 原理求解
动能均为角速度 (广义速度)的函数,
H1
ቤተ መጻሕፍቲ ባይዱ
H2
注:轮系中,一般类角速度是 定值。所以有惯性系数为定值。
M 1 (驱)
M3
M6
1 J12 q 2 J13q 3 Q1 J11q 1 J 22 q 2 J 23q 3 Q2 J 21q J q 2 J 33 q 3 Q3 31 1 J 32 q
N
J q
j 1 N
kj j
Jkj 1 J jj 2 1 Jkk 2 j k ( )q q 2 qk 2 qk j 1 q j
Jkk jq k q j 1 q j
j k
N 1 N
j k N
M 1 LM 1 M k Lk
( q
JkM
L
JkL JML M q L )q qM qk
J ij 的下标的含义:与i、j广义坐标同时有关的构件 的等效质量或惯量。
如
J 23 (mi (ui 2 x ui 3 x ui 2 y ui 3 y ) J is ii 2 ii 3 )
空间任一运动的刚体
三、系统势能
势能只与位置有关,即仅与广义坐标本身有关,因 此在系统运动明确之后,势能也可求得,一般在拉 格朗日方程中用“U”表示。 常见势能有
四、广义力
哪些?
广义力一般用虚位移原理求得,如果系统仅有有势 力做功,引入拉氏函数广义力为零(如一些震动系 统)。引入拉氏函数后广义力不包括有势力
例1:如图,已知各转动惯量、力矩 H z1 z 2 z 4 z5 20 z3 z6 60
M3
M6
Q1 M 1 , Q2 M 3 , Q3 M 6
广义力用虚功 原理求解
动能均为角速度 (广义速度)的函数,
H1
ቤተ መጻሕፍቲ ባይዱ
H2
注:轮系中,一般类角速度是 定值。所以有惯性系数为定值。
M 1 (驱)
M3
M6
1 J12 q 2 J13q 3 Q1 J11q 1 J 22 q 2 J 23q 3 Q2 J 21q J q 2 J 33 q 3 Q3 31 1 J 32 q
N
J q
j 1 N
kj j
Jkj 1 J jj 2 1 Jkk 2 j k ( )q q 2 qk 2 qk j 1 q j
Jkk jq k q j 1 q j
j k
N 1 N
j k N
M 1 LM 1 M k Lk
( q
JkM
L
JkL JML M q L )q qM qk
J ij 的下标的含义:与i、j广义坐标同时有关的构件 的等效质量或惯量。
如
J 23 (mi (ui 2 x ui 3 x ui 2 y ui 3 y ) J is ii 2 ii 3 )
空间任一运动的刚体
三、系统势能
势能只与位置有关,即仅与广义坐标本身有关,因 此在系统运动明确之后,势能也可求得,一般在拉 格朗日方程中用“U”表示。 常见势能有
四、广义力
哪些?
广义力一般用虚位移原理求得,如果系统仅有有势 力做功,引入拉氏函数广义力为零(如一些震动系 统)。引入拉氏函数后广义力不包括有势力
例1:如图,已知各转动惯量、力矩 H z1 z 2 z 4 z5 20 z3 z6 60
自由度体系的运动方程

边界条件的处理
边界条件是运动方程中需要考虑的重要因素,它决定了系统 的行为和响应。
处理边界条件的方法包括直接约束法、引入虚拟约束法、罚 函数法等。根据具体问题选择适当的处理方法,以保证求解 的准确性和有效性。
04 自由度体系的稳定性分析
线性稳定性分析
线性化方程
将非线性自由度体系线性化,得到线性微分方 程。
通过建立自由度体系的运动方程,可以分析飞行器的气动性能、稳定性、控制性能等,为航空航天器设计提供重要的技术支 持。
THANKS FOR WATCHING
感谢您的观看
解析法求解需要对方程进行数学变换 ,如分离变量法、傅里叶变换等,以 简化方程并找到解。
数值法求解
数值法求解运动方程是通过对方程进 行离散化,用一系列离散点上的数值 近似代替连续的解。这种方法适用于 复杂的问题,如多自由度振动或非线 性动力学问题。
数值法求解需要选择适当的离散化方 法和迭代算法,如有限差分法、有限 元法、龙格-库塔法等,以获得满足精 度要求的解。
确定需要优化的参数,并给出其取值范围和约束 条件。
建立约束条件
根据设计要求和实际情况,建立各种约束条件, 如几何约束、性能约束等。
优化算法的选择与实现
优化算法分类
根据设计问题的特点和要求,选择合适的优化算法,如梯度下降 法、遗传算法、模拟退火算法等。
算法实现
根据选定的优化算法,编写相应的计算程序,实现优化设计的过程。
航天器姿态控制
航天器的姿态调整是通过 控制其自由度实现的,如 俯仰、偏航和滚动三个方 向的转动。
车辆动力学
车辆的运动状态可以通过 控制其轮毂电机的自由度 进行调节,实现车辆的稳 定性和操控性。
02 运动方程的建立
结构动力学-第四章 MDOF(Part 1)
华南理工大学 土木与交通学院 土木工程系
⎧ u1 ⎫ ⎧φ1 ⎫ ⎧a ⎫ ⎨ ⎬ = ⎨ ⎬ (ωt + θ ) = β ⎨ ⎬ sin (ωt + θ ) ⎩1 ⎭ ⎩u2 ⎭ ⎩φ2 ⎭
结构动力学 第四章 多自由度体系 5 of 42
或者
§4.1 两自由度体系的振动分析
算例 4.1 设 m1 = m2 = 1,000kg , k1 = 1,500 N / m, k2 = 1,000 N / m 求圆频率和振型
{d }1 {d }2
⎧φ1(1) ⎫ = ⎨ (1) ⎬ ⎩φ2 ⎭ ⎧φ1(2) ⎫ = ⎨ (2) ⎬ ⎩φ2 ⎭
用功能互等定理
{ f }1 {d }2 = { f }2 {d }1
将表达式代入并整理后,可得
(ω
结构动力学
2 1
− ω2 2 )( m1φ1(1)φ1(2) + m2φ2 (1)φ2 (2) ) = 0
结构动力学 第四章 多自由度体系 3 of 42 华南理工大学 土木与交通学院 土木工程系
§4.1 两自由度体系的振动分析
为得到非零解,必须有
2 Q (ω ) = m1m2ω 4 − ⎣ ω ⎡ m1k2 + m2 ( k1 + k2 )⎤ ⎦ + k1k2 = 0
方程的解
⎛ ⎡ k 1 k +k ω1 = ⎜ ⎢ 1 2 + 2 − ⎜ 2 ⎢ m1 m2 ⎝ ⎣ ⎛ ⎡ 1 ⎢ k1 + k2 k2 ⎜ + + ω2 = ⎜ 2 ⎢ m1 m2 ⎝ ⎣ ⎤⎞ ⎛ k1 + k2 k2 ⎞ k1k2 ⎥ ⎟ + − 4 ⎜ m ⎟ m m1m2 ⎥ ⎟ 1 2 ⎠ ⎝ ⎦⎠ 12 2 ⎞ ⎤ ⎛ k1 + k2 k2 ⎞ k1k2 ⎥ ⎟ ⎜ m + m ⎟ −4mm ⎟ 1 2 ⎠ 1 2 ⎥ ⎝ ⎦⎠
⎧ u1 ⎫ ⎧φ1 ⎫ ⎧a ⎫ ⎨ ⎬ = ⎨ ⎬ (ωt + θ ) = β ⎨ ⎬ sin (ωt + θ ) ⎩1 ⎭ ⎩u2 ⎭ ⎩φ2 ⎭
结构动力学 第四章 多自由度体系 5 of 42
或者
§4.1 两自由度体系的振动分析
算例 4.1 设 m1 = m2 = 1,000kg , k1 = 1,500 N / m, k2 = 1,000 N / m 求圆频率和振型
{d }1 {d }2
⎧φ1(1) ⎫ = ⎨ (1) ⎬ ⎩φ2 ⎭ ⎧φ1(2) ⎫ = ⎨ (2) ⎬ ⎩φ2 ⎭
用功能互等定理
{ f }1 {d }2 = { f }2 {d }1
将表达式代入并整理后,可得
(ω
结构动力学
2 1
− ω2 2 )( m1φ1(1)φ1(2) + m2φ2 (1)φ2 (2) ) = 0
结构动力学 第四章 多自由度体系 3 of 42 华南理工大学 土木与交通学院 土木工程系
§4.1 两自由度体系的振动分析
为得到非零解,必须有
2 Q (ω ) = m1m2ω 4 − ⎣ ω ⎡ m1k2 + m2 ( k1 + k2 )⎤ ⎦ + k1k2 = 0
方程的解
⎛ ⎡ k 1 k +k ω1 = ⎜ ⎢ 1 2 + 2 − ⎜ 2 ⎢ m1 m2 ⎝ ⎣ ⎛ ⎡ 1 ⎢ k1 + k2 k2 ⎜ + + ω2 = ⎜ 2 ⎢ m1 m2 ⎝ ⎣ ⎤⎞ ⎛ k1 + k2 k2 ⎞ k1k2 ⎥ ⎟ + − 4 ⎜ m ⎟ m m1m2 ⎥ ⎟ 1 2 ⎠ ⎝ ⎦⎠ 12 2 ⎞ ⎤ ⎛ k1 + k2 k2 ⎞ k1k2 ⎥ ⎟ ⎜ m + m ⎟ −4mm ⎟ 1 2 ⎠ 1 2 ⎥ ⎝ ⎦⎠
结构动力学(运动方程)

P( t )
是什麽? 由位移计算可知,单位荷载下简支梁跨中竖向位移
为
768EIP 11P(t )l
3
48EI l
3
因此在所示“外力”下,质量的位移为
cv ) P v (mv
2.2 运动方程建立举例
2.2.1 单自由度体系运动方程 例-6) 试建立图示质量、弹簧、阻尼器抽 象化模型的运动方程。 解:设质量水平位移为u,向右为正。 以m为隔离体,加上惯性力fI、阻尼力 fd如图所示,此外还有弹簧的弹性恢复 力fe 。根据达朗泊尔原理和阻尼假定 k
后可得
t2
t1
δu cu δu kuδu p(t )δu]dt 0 [mu
3.2.1.3-2
d( δu) / d t ,上式中的第一项可表示为如下的分部积分: 利用关系 δu
t2
t1
δud t mu δu mu
t2
t1
δudt mu
t1
t2
m P( t ) l/2 l/2
f I mv
fd cv
2.2 运动方程建立举例
m l/2
2.2.1 单自由度体系运动方程 l/2 例-5) 若例-2)简支梁动荷载作用在3l/4处, 试建立其运动方程 解:将惯性力fI、阻尼力fd如图所示加于梁上,根据达 作业: fd 朗泊尔原理和阻尼假定 fd cv P f-I1的 P(t) f I mv 仅在P(t)作用下m的位移由位移计算得 l/2 l/2 物理意义
因为 u 不等于零,故可得与式 3.2.1.1-4 相同的方程。
哈密尔顿原理
哈密尔顿积分变分原理可表示为
t2
结构动力学多自由度
k = k − kG
弹性特性
刚度的定义: 刚度的定义:
表示一个自由度发生相应单位位移而其他节点不动时在结构中所 产生的的力。 产生的的力。
弹性特性
柔度的定义: 柔度的定义:
~ ~ ~ 则任意荷载组合下: 则任意荷载组合下: v i = f i 1 p1 + f i 2 p2 + L + f iN p N ~ ~ ~ 用矩阵表示: 用矩阵表示: v1 f 11 L f 11 L f 11 p1 M M M M M ~ f 11 L ~11 L ~11 pi vi = f f M M M M M v N ~ L ~ L ~ p N f11 f11 f 11 ~ v = fp
多自由度体系的振动分析
运动方程
多自由度体系的动力平衡方程: 多自由度体系的动力平衡方程:
f I + f D + f S = p(t )
即:
&& & m v + cv + kv = p(t )
&& & m v + cv + kv − kG v = p(t )
考虑几何刚度: 考虑几何刚度: 或
&& & m v + cv + k v = p(t )
当结构的全部有限自由度的刚度系数均以求得后, 当结构的全部有限自由度的刚度系数均以求得后,只要适当 地叠加单元的刚度系数,就能得到整个结构的刚度, 地叠加单元的刚度系数,就能得到整个结构的刚度,这就叫 做直接刚度法。 做直接刚度法。 结构的任何一个刚度系数,都能通过与这些节点相连的单元, 结构的任何一个刚度系数,都能通过与这些节点相连的单元, 所对应的刚度系数叠加求得。 所对应的刚度系数叠加求得。
结构动力学多自由度

pbT
~ fpa
paT ~fpb paT ~fpb T pbT ~f T pa pbT ~fpa
故 ~f 、 k 均为对称矩阵。
单元刚度矩阵
单元刚度系数表示由单位节点位移所引起的节点力。
单元刚度系数由虚位移法求得。
例如,课本P106图11-5所示简支梁中,令a端发生单位转角, 并给该处一竖向虚位移,零外力所做的功,等于内力所做的 功。
表示一个自由度发生相应单位位移而其他节点不动时在结构中所 产生的的力。
弹性特性
柔度的定义:
~ fij —在j坐标施加单位荷载而引起的i坐标的挠度。
则任意荷载组合下: vi ~fi1 p1 ~fi2 p2 ~fiN pN
用矩阵表示:
v1
vi
v N
略去阻尼矩阵和施加的荷载向量的影响: mv kv 0
假定以上多自由度体系的振动是简谐振动:
v(t) vˆ sin(t )
vˆ 表示体系的形状,不随时间变化。
v 2vˆ sin(t ) 2v 2mvˆ sin(t ) kvˆ sin(t ) 0
k 2m vˆ 0
无阻尼自由振动—振动频率分析
k 2m vˆ 0
即: k 2m 0
上式的N个根,表述体系可能存在的N个振型的频率。
1
2
3
WE va pa v1 k13
Lபைடு நூலகம்
WI v1 0 EI ( x) 1''( x) 3''( x)dx
(结构动力学6)多自由度体系运动方程49
kN2
k2N
k NN
uuN2
K
u
{fs}称为弹性恢复力向量, [k]称为刚度矩阵, {u}—称为位移向量。
6.1 直接平衡法
对于三层结构, 刚度矩阵为:
k1 k2
K
k2
0
k2 k2 k3
k3
0
自由度方法也可以得到相当好的近似解。但对于复杂
的结构体系或作用的外荷载变化复杂时,用等效的单
自由度方法得到的解可能会导致相当大的误差。这时
就必须直接采用多自由度体系分析方法解决问题,即 必须采用更多自由度来描述体系的运动状态。
第六章 多自由度体系的运动方程
建立单自由度体系运动方程的方法均可以用来建立多自 由度体系的运动方程,例如:牛顿第二定律;直接平 衡法(d’ Alember);虚位移原理;Hamilton方程;运动 的Lagrange方程,都可用于多自由度体系。但基于矩 阵位移法的直接平衡方程和基于变分原理的Lagrange 方法应用更广泛一些。前者对于多自由度体系直接应 用动平衡的概念以矩阵的形式建立体系的运动方程, 概念直观,易于通过各个结构单元矩阵(刚度矩阵、质 量矩阵、阻尼矩阵)建立整个结构体系的相应矩阵,进 而建立体系的运动方程,便于计算机编程,在结构动 力分析的有限元程序中基本上都基于直接平衡法。而 对于一些特殊的问题,例如,大变形(位移)问题, 采用Lagrange方法可能更有效。本章将主要介绍这两 种方法。
式中:
t2 (T V )dt
t1
t2 t1
直接平衡法
在这一节中将主要介绍建立多自由度体系运动方程的直 接平衡法的基本概念和实施技术,可能不加证明地给 出一些构件单元,例如梁单元的刚度阵和质量阵的表 达式。我们可以直接应用这些矩阵完成远动方程的建 立和分析计算,最主要的是知道这些矩阵中每一个元 素的物理意义。目的是在建立多自由度体系运动方程 后,可以快速地进入对多自由度体系动力反应特点和 分析方法的了解和总的把握。与前面刚讲完的单自由 度体系运动问题分析方法有一个较好的衔接,而不是 花太多的时间讲有关单元矩阵的建立。而单元刚度阵、 质量阵和阻尼阵的建立将在后面有限元法和具有分布 参数系统分析方法中逐步得到学习。
k2N
k NN
uuN2
K
u
{fs}称为弹性恢复力向量, [k]称为刚度矩阵, {u}—称为位移向量。
6.1 直接平衡法
对于三层结构, 刚度矩阵为:
k1 k2
K
k2
0
k2 k2 k3
k3
0
自由度方法也可以得到相当好的近似解。但对于复杂
的结构体系或作用的外荷载变化复杂时,用等效的单
自由度方法得到的解可能会导致相当大的误差。这时
就必须直接采用多自由度体系分析方法解决问题,即 必须采用更多自由度来描述体系的运动状态。
第六章 多自由度体系的运动方程
建立单自由度体系运动方程的方法均可以用来建立多自 由度体系的运动方程,例如:牛顿第二定律;直接平 衡法(d’ Alember);虚位移原理;Hamilton方程;运动 的Lagrange方程,都可用于多自由度体系。但基于矩 阵位移法的直接平衡方程和基于变分原理的Lagrange 方法应用更广泛一些。前者对于多自由度体系直接应 用动平衡的概念以矩阵的形式建立体系的运动方程, 概念直观,易于通过各个结构单元矩阵(刚度矩阵、质 量矩阵、阻尼矩阵)建立整个结构体系的相应矩阵,进 而建立体系的运动方程,便于计算机编程,在结构动 力分析的有限元程序中基本上都基于直接平衡法。而 对于一些特殊的问题,例如,大变形(位移)问题, 采用Lagrange方法可能更有效。本章将主要介绍这两 种方法。
式中:
t2 (T V )dt
t1
t2 t1
直接平衡法
在这一节中将主要介绍建立多自由度体系运动方程的直 接平衡法的基本概念和实施技术,可能不加证明地给 出一些构件单元,例如梁单元的刚度阵和质量阵的表 达式。我们可以直接应用这些矩阵完成远动方程的建 立和分析计算,最主要的是知道这些矩阵中每一个元 素的物理意义。目的是在建立多自由度体系运动方程 后,可以快速地进入对多自由度体系动力反应特点和 分析方法的了解和总的把握。与前面刚讲完的单自由 度体系运动问题分析方法有一个较好的衔接,而不是 花太多的时间讲有关单元矩阵的建立。而单元刚度阵、 质量阵和阻尼阵的建立将在后面有限元法和具有分布 参数系统分析方法中逐步得到学习。
第四章结构动力学多自由度体系详解

此时惯性力
设解为 y1(t) Y1 sin(t )
y2
(t)
Y2
s
in(t
)
幅值
m1y1(t) m1 2Y1 sin(t )
m2
y2
(t
)
m2
2Y2
s
in(t
)
2m1Y1 2m2Y2
Y1 ( 2m1Y1)11 ( 2m2Y2 )12
Y2 ( 2m1Y1) 21 ( 2m2Y2 ) 22
振但动其过比程值中始,终结保构持位不移变形。状保持不变的振动形式,称为主振型。
(k11 2m1
k21Y1 (k22
)Y1 k12Y2
2m2 )Y2
0 0
当然 Y1=Y2=0 为其解,为了求得不全为零的解,令
D (k11 2m1)
k12
0
k21
(k22 2m2 )
特征方程 频率方程
第1振型
第2振型
(2)求频率(k1 k2 2m1)(k2 2m2 ) k22 0
若有 m1 nm2 [(n 1)k2 2nm2 ](k2 2m2 ) k22 0
k1 n k2 (3)求主振型
12
2
1 2
(2
1) n
4 n
1 n2
k2 m2
1 :
Y21 Y11
k22
二、 柔度法
m2 y2 m2
m1y1 m1
在自由振动过程中任意时刻t,质量m1、
y2(t) m2的位移y1(t)、y2(t)应当等于体系在当时 惯性力作用下的静力位移。
y1(t)
y1(t) m1y1(t)11 m2 y2(t)12
y2 (t) m1y1(t) 21 m2 y2 (t) 22
结构动力学第三章多自由度讲课文档
称除非 M 是对角阵。求出i 后回代方程
(K M i2 )i 0
得到 n 个i特征向量,i
1i ,2i ,...,ni
T
,则
x(i) t i sin it i
称为第 i 阶主振动
x(i) t x1(i) , x2(i) ,..., xn(i) T
第十六页,共56页。
这里的i 称为第 i 阶主振型,也称第 i 阶模态
表示,其余都与其成一定比例。
i 1i
1,
i
2
,
...,
i
n
T
n 个振型向量放在一起构成一个矩阵,称为模态矩
阵。 1,2,...,n
各列向量的元素取值是相对的,可以任意乘或除一
个常数,表示第 i 阶振动时各质点振幅的相对比值。
第十八页,共56页。
3.2.3 各阶主振型之间的关系
1)关于 M , K 是加权正交的
T 12T
M1 M1
1T M2 2T M2
... ...
1T 2T
Mn Mn
nT
nT M1 nT M2 ... nT Mn
M1
diag
M2
I
...
MnΒιβλιοθήκη TKdiagi2第二十三页,共56页。
2)各个主振型之间是线性无关的。 证:若主振型之间线性相关,必能找出一组不同时
为零的常数 ai 使得
T M diagMi M p
左乘
M
1 p
M
1 T
p
M
右乘 1
M
1 T
p
M
1
第三十页,共56页。
模态正交性的物理解释
T
1 2
07-多自由度系统的运动方程.

多自由度系统的运动微分方程牛顿第二定律矢量建模方法 影响系数法•刚度影响系数法•柔度影响系数法Lagrange方程方法•约束、自由度与广义坐标•Lagrange方程建模方法多自由度系统的运动微分方程牛顿第二定律建模多自由度系统的运动微分方程--牛顿第二定律建模以1m 为研究对象,有()())(1122111221111t F x x c x c x x k x k xm +−+−−+−=&&&&& (1) 以2m 为研究对象,有()())(2232321221212t F x c x k x x c x x k xm +−−−+−=&&&&& (2)将方程(1)、(2)整理可得多自由度系统的运动微分方程--牛顿第二定律建模()[]()[])(1221212212111t F x k x k k x c x c c xm =−++−++&&&& (3) ()[]()[])(2232122321212t F x k k x k x c c x c xm =++−+++−+&&&& (4) 将方程(3)、(4)写成矩阵形式⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡+−−++⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡+−−++⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡)()(002121322221213222212121t F t F x x k k k k k k x xc c c c c c x x m m &&&&&&即)(t F kx x C xM =++&&& 多自由度系统的运动微分方程--牛顿第二定律建模这种用矩阵写出的运动微分方程与单自由度系统的运动微分方程非常相似。
象例题中在各个离散质量上建立的坐标系为描述系统的物理坐标系,在此坐标下的系统质量矩阵、阻尼矩阵和刚度矩阵为系统的物理参数。
结构动力学多自由度

一致几何刚度:
L
kGij 0 N ( x)i '( x) j '( x)dx
静力凝聚
从刚度矩阵中消去不要旳自由度旳过程叫做静力凝聚。
ktt kt
kt k
vt
v
f st f s
f st 0
(ktt kt k1kt )vt kt vt f st
kt (ktt kt k1kt )vt
无阻尼自由振动—轴向力旳影响
屈曲荷载:若振动频率为零,
kv kGv 0
引入基准荷载作用下旳几何刚度:
kG G kG0
L
kG0ij o N0 ( x) 'i ( x) ' j ( x)dx
则: k GkG0 vˆ 0
k GkG0 0
实际上,只有第一阶屈曲荷载以及形状才是有意义旳。
无阻尼自由振动—轴向力旳影响
2
)
y32 (t ) jˆ 32 sin(2t 2 )
1
jˆ
2i
yi
(
t
)
jˆ 3i
sin(i
t
i
)
jˆ ni
1
jˆ 21
jˆ 31
jˆ 32
1
jˆ 22
无阻尼自由振动—振型分析
将N个振型中旳每一振型形式,用F表达N个振型所构成旳方阵。
11 12 13 1N
21
22
23
2N
任何构造旳质量特征,最简朴旳措施是假定全部质量凝聚在
某些需要计算平移位移旳点上,为了拟定配置在每一种节点
上旳点质量,常用旳措施是假定构造分割成段,以节点做为 连接点。
一致质量矩阵:
L
pava m13 v1 0 fI ( x)v( x)dx
第十四章结构动力学多自由度

k11 2m1
k21
k12
0
k22 2m2 频率方程
(equation of frequency)
• 存在两个特征解1 ,2 ;
• 其中最小的一个称第一频率,较大的一个称第 二频率。
9 / 67
§14-6 多自由度结构的自由振动
振型方程的解只可得出振幅的相对比值
A11 A21
k11
k12
m112
一、刚度法
取任意质量mi列动力平衡方程:
FIi FRi Fei FPi 0 n
根据叠加原理有
Fei kij y j
jn1
FRi ij yj
j 1
FI i mi &y&i
n
n
则 mi yi ij yj kij y j FPi
j 1
j 1
mn
yn (t)
y2 (t)
m1
y1 (t )
按主振型振动的条件: 初位移或初速度与此振型相对应;
一般初始条件下的振动通常不能完全与某一振型 相对应,因此振动将是主振动的叠加。
y1 (t ) y2 (t )
AA11sin(1t AA21sin(1t
1) BA12sin(2t 2 ) 1) BA22sin(2t 2 )
多自由度体系自由振动的振型分解
A1TKA2 0
(i 1, 2,, n)
2 / 67
§14-6 多自由度结构的自由振动
写成矩阵形式
m1
m2
O
&y&1 11 12 L
mn
&y&M2 &y&n
21
L
n1
22
L
(结构动力学6)多自由度体系运动方程49

第六章 多自由度体系的运动方程
建立单自由度体系运动方程的方法均可以用来建立多自 由度体系的运动方程,例如:牛顿第二定律;直接平 衡法(d’ Alember);虚位移原理;Hamilton方程;运动 的 Lagrange 方程,都可用于多自由度体系。但基于矩 阵位移法的直接平衡方程和基于变分原理的 Lagrange 方法应用更广泛一些。前者对于多自由度体系直接应 用动平衡的概念以矩阵的形式建立体系的运动方程, 概念直观,易于通过各个结构单元矩阵(刚度矩阵、质 量矩阵、阻尼矩阵)建立整个结构体系的相应矩阵,进 而建立体系的运动方程,便于计算机编程,在结构动 力分析的有限元程序中基本上都基于直接平衡法。而 对于一些特殊的问题,例如,大变形(位移)问题, 采用 Lagrange 方法可能更有效。本章将主要介绍这两 种方法。
6.1 直接平衡法
首先复习一下结构力学中的刚度阵法(矩阵位移法) 如果为N层结构,自由度为N,每一楼层有集中质量mi, 外荷载pi,层间刚度ki,各层的水平运动为ui,i=1, …, N。这个层间模型也可以转化成质点—弹簧模型。
6.1 直接平衡法
应用d’Alember原理
f I i f D i f s i pi (t ), i 1, 2, N
fIi—惯性力; fDi—阻尼力; fsi—弹性恢复力; pi—外力。
f I
f I1 f I2 f IN
p1 (t ) p (t ) 2 p(t ) p N (t )
其中{fI}称为惯性力向量,{M}称为质量矩阵,{ü }为加速 度向量。质量矩阵中的系数mij为质量影响系数,简称质 量系数或质量,它的含义是: mij—由j自由度的单位加速度引起的相应于i自由度的力 即给定j自由度一个单位加速度,产生了惯性力,其余自 由度加速度为零时,所需要的力。
第8章2 结构动力计算-多自由度.ppt

8. 5 两自由度体系的振动分析
F
1.6F
0.6F
1.2F
1.2F
0.6F 0.3F 0.3F 1.2F 0.9F 0.9F
0.15Fh 0.15Fh 0.45Fh 0.45Fh
8. 5 两自由度体系的振动分析
已知:EI=常数, 0.61 3.415 EI ml 3 , m1 m2 m.
m1 m2
m1m2
( 2 )1, 2
1 2
( k11 m1
k22 m2
)
1 ( k11 k22 )2 k11k22 k12k21
4 m1 m2
m1m2
8. 5 两自第由15度章体结系构的的振动力动计分算析
1 2
11
k12
k22 m112
21
k11 m112
k21
1 2 22
k11
(generalized coordinates或称正则坐标)
2
T j
MY
=
T j
M
i i
i 1
T j
MY
= j
M
j
j
=
T j
MY
/
M
j
=
T j
MY
T j
M
j
8. 5 两自第由15度章体结系构的的振动力动计分算析
( 4 )将两自由度体系变成单自由度求解
2
Y = i i
MY KY 0
运动方程 MY KY F0sin t 特解(稳态解) Y = A sint
幅值方程 2MA KA ( 2M K)A F0 B 2M K
A B1F0 ( 2M K)1F0
2
Y Cii sin (it i ) +A sin t i 1