第六章有轨巷道堆垛机20100310
巷道堆垛机的安全保护装置
巷道堆垛机的安全保护装置摘要:介绍了堆垛机的结构组成和工作原理,从机械装置和电气控制两个方面阐述了巷道堆垛机的安全保护措施。
关键词:堆垛机安全保护装置自动化立体仓库由于具有空间利用率高、生产效率高,采用计算机进行控制管理,有利于企业实现现代化管理等优点,已成为企业物流和生产管理不可缺少的仓储技术。
巷道堆垛机是自动化立体仓库的核心设备。
作为一种起重机械,它在巷道内高速运行.为避免对人身、设备及货物造成威胁,其在机械和电气方面需要具有非常完善的安全保护措施。
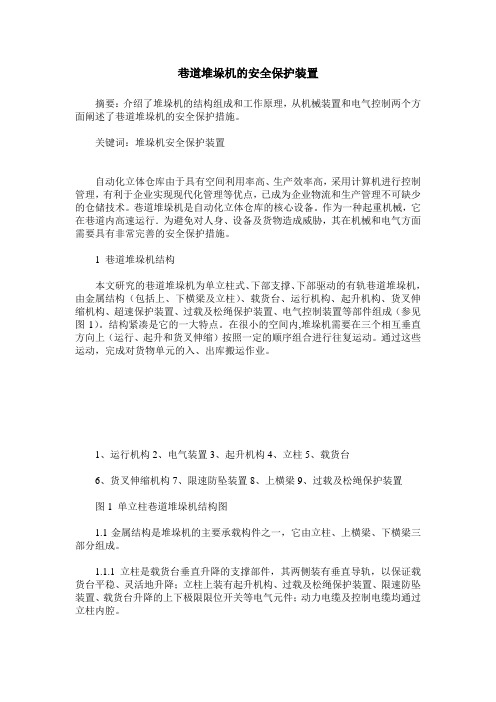
1 巷道堆垛机结构本文研究的巷道堆垛机为单立柱式、下部支撑、下部驱动的有轨巷道堆垛机,由金属结构(包括上、下横梁及立柱)、载货台、运行机构、起升机构、货叉伸缩机构、超速保护装置、过载及松绳保护装置、电气控制装置等部件组成(参见图1)。
结构紧凑是它的一大特点。
在很小的空间内,堆垛机需要在三个相互垂直方向上(运行、起升和货叉伸缩)按照一定的顺序组合进行往复运动。
通过这些运动,完成对货物单元的入、出库搬运作业。
1、运行机构2、电气装置3、起升机构4、立柱5、载货台6、货叉伸缩机构7、限速防坠装置8、上横梁9、过载及松绳保护装置图1 单立柱巷道堆垛机结构图1.1金属结构是堆垛机的主要承载构件之一,它由立柱、上横梁、下横梁三部分组成。
1.1.1立柱是载货台垂直升降的支撑部件,其两侧装有垂直导轨,以保证载货台平稳、灵活地升降;立柱上装有起升机构、过载及松绳保护装置、限速防坠装置、载货台升降的上下极限限位开关等电气元件;动力电缆及控制电缆均通过立柱内腔。
1.1.2上横梁由钢板焊接而成,它上部装有起升用的定滑轮和支撑堆垛机的上部导向轮组。
钢丝绳通过这些滑轮及载货台上的动滑轮,使载货台能上升或下降。
1.1.3下横梁由钢板焊接而成,是堆垛机的主要支撑部件。
下横梁上装有运行驱动车轮组、从动车轮组、下部水平轮组及夹轨器等装置。
还装有红外通讯、电气控制柜及运行限位开关组等电气装置。
物流技术堆垛机介绍

物流技术
分类
1、按支承方式分 ➢悬挂式堆垛机 :其行走机构安装在堆垛机 门架的上部,地面上也铺设有导轨。 ➢地面支承式堆垛机:行走轨道铺设于地面上, 上部导轮用来防倾倒或摆动。
物流技术
分类 2、按结构形式分 物流技术
物流技术
特点
1. 整机结构高而窄。采用有轨巷道式堆垛机 的高架仓库货架很高,而货架巷道非常狭 窄,堆垛机的宽度一般只与所搬运的单元 货物的宽度相等。
2. 结构的刚度和精度要求高。堆垛机的金属
结构设计除需满足强度要求外,结构的静
刚度、动刚度是一项非常重要的指标。制
动时,机架顶端水平位移一般要求不超过
物流技术
有轨巷道式堆垛机与无轨巷道堆垛机比较: ➢有轨巷道式堆垛机采用钢轮在钢轨上运行,无轨堆 垛机采用轮胎,因此轮压不同时会产生不同的变形量 ➢有轨堆垛机采用立柱,无轨堆垛机采用多极门架, 货叉在水平和垂直方向上的定位精度不同
物流技术
五、有轨巷道堆垛机
有轨巷道堆垛机,是指可以在较窄的巷道内作业的堆垛机, 具有一个升降轨道,堆垛机在轨道上上下升降运行。有轨 堆垛机根据金属结构可以分为:单立柱和双立柱式两种。 有轨堆垛机可以在立柱上进行多面旋转,堆高的高度在624米。有轨堆垛机占地面积很小,大大提高了仓库内的面 积和空间的利用率,利于仓库自动化的运行和管理。
当堆垛机启动、停止及加减速运行时会产生惯性力,使立柱 在巷道的纵向发生挠曲,整个金属结构成为振动体,其上部 的振动较大。同样,在巷道的垂直方向,立柱由于货叉作业 时的弯矩作用而产生弯曲,使叉端挠度增大。当柱端振动和 货叉前端的挠度超过极限值时,就成为堆垛机自动定位的障 碍,所以堆垛机的金属结构应具有足够的强度和刚度。
物流工程巷道式堆垛起重机

6.3巷道式堆垛起重机
6.3.2 结构组成 1.运行机构. 在堆垛机的下横梁上装有运行驱动
机构和在轨道地轨上运行的车轮.按运行机构所 在的位置不同可以分为地面驱动式、顶部驱动 式和中部驱动式等几种.顶部驱动式堆垛机又可 分为支承式和悬挂式两种,前者支承在天轨上运 行,堆垛机底部有两组水平导向轮.悬挂式堆垛 机则悬挂在位于巷道上方的支承梁上运行.
(2)双立柱型 金属结构由两根立柱和上、下横梁组成一
个刚性框架;刚性好,自重较单立柱大.适用于 各种起升高度的仓库;起重量可达5吨或更大; 适用于高速运行、快速起、制动. 2.按支承方式分类 (1)地面支承型 支承在地面轨道上,用下部车轮支承和驱动;上 部设水平导向轮;运行机构布置在下部.适用 于各种起重量和起升高度的仓库;
6.3巷道式堆垛起重机
6.3巷道式堆垛起重机
单击图片播放
6.3巷道式堆垛起重机
图6-9单、双柱式巷道堆垛机
6.3巷道式堆垛起重机
(2)悬挂型 仓库屋架下装设轨道,起重机悬挂于轨道下翼缘上运行;
仓库货架下部设导轨,起重机下部设水平导向轮靠在导轨上 防止摆动过大;运行机构设在上部.适用于起重量较小、起 升高度较低(不大于15米)的仓库;便于转移巷道.
6.3巷道式堆垛起重机
6.3巷道式堆垛起重机
6.3巷道式堆垛起重机
6.3巷道式堆垛起重机
6.3巷道式堆垛起重机
6.3巷道式堆垛起重机
3.提升机构. 堆垛机的起升机构由电动机、制 动器、减速机、卷简或链轮以及柔性件组成, 常用的柔性件有钢丝绳和起重链等.卷扬机通 过钢丝绳牵引载荷台作升降运动. 起升机构的工作速度一般在12.30m/min, 最高可达48m/min.不管先用多大的工作速度, 都备有低速档,主要用于平稳停车和取存货物 时的“微升降”作业. 在堆垛机的起重、行走和伸叉(叉取货物) 三种驱动中,起重的功率最大.
物流配送中心的有轨巷道式堆垛机

、 机 械 ,屉 随 体 仓 库的 m 现 而 发展 起 来的 专 用 起厦 l k 机 竹轨 巷遭堆 垛 机心 过运 行 机构 、 升机 卡 起 句和货 义的 嗣 r ,完 成 货物在 货架 范 周 内的纵 向 和横 向 移动 , 作
装 有导 向轮 它 的 I 安装滑 轮或 链轮 机构 、 l水平 导 24 载 货 台 部 : . 轮、 电缆拖 抟机 构或滑 触线 供电装 髓 中部 或下 部盛裟 起 载货 台 足堆 垛 机承 接 贷物 并进 行 升降 运动 的 部件 . 升机 掬 . + 内侧 安桂 州 峁导轨 . 使载 货台平 稳地 卜升及 魁 垂 直吊架 和水 斗结 构 州部分 牢 地 焊接 成 的结 构 £ F降 外 侧犍 有维修 爬梯便 维修 . 下部安 黻 毒莉及 被 动 乍轮 、 行 蛾 动牲 坦 及 F水平 导轮 、 冲 器等 部件 运 缓 件 , 【 有 货义 伸缩 机 构 绳过 载 干断 绳 安伞 装酋 装 松 n 升降动滑 轮 、1 ,降 向轮相I 导轮 删向 后 部和 侧曩 犍有 电 器拄删 机 I 1 F 终端 限位 开 25 货 又 及 降 7 . 关 和选J 认址板 等翻 件 5 货 艾魁堆垛 机 存取 货物 的执 行机构 ,犍 【 于载 货 台 5 } ;
安 全保 护装 置构 成
21 机 . 榘
起升 机构 用 以驱 动载 货 台 }升及下 降。起 升机 构 :
婴F电机 减速 器 、 h 驱动链 轮 动链 条 驱 升降链 轮 、 升降链
堆垛 机的机 架 足m 、桩 I 槊 、 ) . : 横 下横繁组 成 的 f方 条 、 ∈ 配重 块等组 成 升降链 条 虢货 台相 连接 . 升降链 与 形结 构框 架 . 垛 tt书器 取载 构件 为 r俺干 安城零 轮 F磺梁 的健轮披 裁货 台组成 封闭结 构 电机 减速机 足 t , ' J 件 和减 轻堆 垛机 露镀 .I、 横 粱 用榴 制制 作 , 杜 用 力 F 通 过冁动 链轮 带动 升降链 轮 旋转 .升降 链轮再 通 过7 降 1 通 制作 机架 沿 灭轨运 行 , 为防 J框架 倾倒 , I 梁 f I 在 : 横 链 条带动 城货 台 F运动
【10-10】JB5319.2—91有轨巷道堆垛起重机安全规范
有轨巷道堆垛起重机安全规范JB 5319.2—91中华人民共和国机械电子工业部1991—07—03批准1992—07—01实施1 主题内容与适用范围本标准规定了有轨巷道堆垛起重机的设计、制造、使用等方面的安全要求。
本标准适用于高层货架仓库内的有轨巷道堆垛起重机(以下简称堆垛机)。
2 引用标准GB 985 气焊、手工电弧焊及气体保护焊焊缝坡口的基本形式与尺寸GB 986 埋弧焊焊缝坡口的基本形式与尺寸GB 1102 圆股钢丝绳GB 2682 电工成套装置中的指示灯及按钮的颜色GB 3323 钢熔化焊对接接头射线照相和质量分级GB 3811 起重机设计规范GB 4205 控制电气设备的操作件标准运动方向GB 5117 碳钢焊条GB 5118 低合金钢焊条GB 5972 起重机械用钢丝绳检验和报废实用规范GB 8110 二氧化碳气体保护焊用钢焊丝GBJ 232 电气装置安装工程施工及验收规范3 一般要求3.1 堆垛机及其零、部件的强度、刚度、稳定性等,应满足GB 381l的规定。
3.2 结构件焊接要求3.2.1 主要受力构件,如下横梁、立柱、上横梁、载货台、货叉等,其对接焊缝质量不得低于GB 3323中Ⅱ级焊缝的规定。
3.2.2 焊条、焊丝和焊剂应与被焊接件的材料相适应,并应符合GB 5117、GB 5118和GB 8110的规定。
3.2.3 焊缝应符合GB 985与GB 986的规定。
3.2.4 焊接工作必须由经培训考试合格的焊工担任。
主要受力构件的焊缝附近必须打上焊工及检验人员代号钢印。
3.3 可拆装的连接部件,应防止自行松动。
3.4 堆垛机的金属结构和零、部件应采取防锈措施。
3.5 堆垛机电气设备的安装,必须符合GBJ 232的有关规定。
4 构造设计安全要求4.1 设计堆垛机时,应考虑堆垛机遇上撞击不倾覆,并应防止堆垛机脱轨。
4.2 司机室设计要求4.2.1 司机室应有良好的视野,能观察到货物人出库作业的全部过程,并便于操作和维护。
物流技术堆垛机介绍
基本组成
巷道式堆垛机由升降机构、运行机构、货叉伸缩机构、 机架以及电器部分组成。
起升机构
升降机构是使载货台垂直运动的机构。一般
由电动机、制动器、减速机、滚筒或轮以及
柔性件组成。常用的柔性件有钢丝绳和起重
链两种。除了一般的齿轮减速机外,由于需
要比较大的速比,因而采用蜗轮蜗杆减速机
和行星减速机的也不少。起重链传动装置多
物流技术
按照结构不同分类
名称
特点
带固定立柱的支撑式桥式堆垛机 由带立柱的小车和桥架组成,结 构简单,使用方便
带伸缩立柱的支撑式桥式堆垛机 带固定立柱的悬挂式桥式堆垛机 带伸缩立柱的悬挂式桥式堆垛机
具有伸缩式立柱,可以越过障碍 物进行装卸和堆垛
桥架质量较轻,起重机的轨道固 定在屋顶的杵架上
具有伸缩式立柱,质量较轻,轨 道固定在屋顶杵架上
物流技术
基本组成
取物装置:根据托盘的形状,单元货物的尺寸与重量 等。目前已设计出了各种取货装置,包括人力取货, 采用电磁或真空吸盘的存取装置,利用动力输送机的 存取装置,利用机械手的取货装置以及最普遍的伸缩 货叉装置等,而最常用的是伸缩货叉取货装置。
物流技术
基本组成
货叉装置是堆垛机存取货物的执行机构,装设在堆垛机载货台上。 货叉可以横向伸缩,以便向两侧货格送入(或取出)货物。货叉根据 其叉子的数量不同,可分为单叉货叉、双叉货叉和多叉货叉。最常见 的是前两种,多叉货叉多用于特长货物的堆垛。
最高可达45m/min。慢速档一般为3-5m/min。
➢货叉伸缩速度:货叉伸缩速度一般为15m/min以下,高的可
达 30m/min,在超过 10m/min时需配备慢速挡,在启动和制动
时用。
物流技术
物流技术堆垛机

性能参数
2、速度参数
水平运行速度:行走速度80m/min左右,也有120m/min,最
高可达180m/min;货物容易散落或载人的堆垛机的加减速度
一般为0.3-0.5m/s2;对于货物不易散落的堆垛机,其加减速
度应在l m/s2以下;
升降速度:升降机构的工作速度一般经常用15-25m/min,
物流技术
安全保护装置与措施
4.货物位置和外形检测。如果货物单元在载货台 上位置偏差超过一定限度,或者倒塌变形,检测装置 便报警,堆垛机不能继续工作。
5. 堆垛机停准后才能伸货叉。 6.货叉在货格内作微升降时,用检测开关限制微 升降行程或限制其动作时间,以防止货叉微升降过度, 损坏货物、机构或货架。
基本组成
巷道式堆垛机由升降机构、运行机构、货叉伸缩机构、 机架以及电器部分组成。
起升机构
升降机构是使载货台垂直运动的机构。一般
由电动机、制动器、减速机、滚筒或轮以及
柔性件组成。常用的柔性件有钢丝绳和起重
链两种。除了一般的齿轮减速机外,由于需
要比较大的速比,因而采用蜗轮蜗杆减速机
和行星减速机的也不少。起重链传动装置多
最高可达45m/min。慢速档一般为3-5m/min。
货叉伸缩速度:货叉伸缩速度一般为15m/min以下,高的可
达 30m/min,在超过 10m/min时需配备慢速挡,在启动和制动
时用。
物流技术
性能参数
堆垛机起重量系列标准
型式 拣选型 单元型和拣选—-单元混合型
额定起重量
0.1 0.25 0.1 0.25 0.5 1 1.6 2
物流技术
基本组成
取物装置:根据托盘的形状,单元货物的尺寸与重量 等。目前已设计出了各种取货装置,包括人力取货, 采用电磁或真空吸盘的存取装置,利用动力输送机的 存取装置,利用机械手的取货装置以及最普遍的伸缩 货叉装置等,而最常用的是伸缩货叉取货装置。
物流技术堆垛机介绍

分类
1、按支承方式分
➢悬挂式堆垛机 :其行走机构安装在堆垛机 门架的上部,地面上也铺设有导轨。 ➢地面支承式堆垛机:行走轨道铺设于地面上, 上部导轮用来防倾倒或摆动。
分类 2、按结构形式分
双立柱堆垛机 刚度好 速度快 起重量可达5t
单立柱堆垛机 自重轻 刚度差 起重量2t以下
分类
3、按作业方式分
➢单元式堆垛机 是对托盘单元进行出入库作业的堆垛机。 ➢拣选式堆垛机 是由操作人员向(或从)货格内的托盘 (或货箱)中存入(或取出)少量货物,进行出入库作业的 堆垛机。这种堆垛机的特点是没有货叉。 ➢拣选-单元混合式堆垛机 具有单元式与拣选式综合功能 的堆垛机。其载货台上既有货叉装置,又有司机室,可以满 足两种作业方式的要求。
基本组成
伸缩货叉的结构形式主要有两种:齿轮齿条及链传动。
这两种传动方式各有其优缺点:齿轮传动的传动精度较 高,定位准确,但是齿轮传动方式的齿条加工困难,装 配精度要求很高;而链传动方式虽然精度不高,但加工 装配都比较容易。
基本组成
机架是堆垛机的主要承载构件,可分为单立柱和双立柱两种 结构类型。一般都是由立柱、上横梁和下横梁三大部分组成。
货叉一般采用三级直线差动式伸缩货叉,由上叉、中叉、下叉 (固定叉)及起导向作用的滚针轴承等组成,以减少巷道的宽度,且 使之具有足够的伸缩行程。货叉的动作包括伸叉、微起升(或微下 降),收叉三个动作,货叉伸出(或收回)动作时,其速度也为双档 变速。货叉伸缩速度一般为15m/min以下,高的可达 30m/min,在超过 10m/min时需配备慢速挡,在启动和制动时用。
安全保护装置与措施
一、运行保护 1. 在运行和升降方向,距终端开关一定距离处设强迫减
速开关,以确保及时减速。 2. 货叉伸缩机构只有在堆垛机运行机构不工作和起升机
有轨式巷道堆垛机机械结构设计-毕业设计【范本模板】
编号本科生毕业设计有轨式巷道堆垛机机械结构设计The Design of the Overall structure and walking mechanism of a stacker crane学生姓名专业学号指导教师学院2011年 06 月自动化立体仓库是物流中的重要组成部分,它是在不直接进行人工干预的情况下自动地存储和取出物流的系统.它是现代工业社会发展的高科技产物,对提高生产率、降低成本有着重要意义。
近年来,随着企业生产与管理的不断提高,越来越多的企业认识到物流系统的改善与合理性对企业的发展非常重要.堆垛机是自动化立体仓库中最重要的起重堆垛设备,它能够在自动化立体的巷道中来回穿梭运行,将位于巷道口的货物存入货格;或者相反取出货格内的货物运送到巷道口。
本文详细论述了在现代大多数企业中普遍使用的双立柱堆垛机的设计方案,文章的重点放在其三个部件:升降机构、行走机构、货叉伸缩机构的设计上.首先,提出各个机构的总体设计方案;其次,对各个机构的受力情况进行了分析并计算,然后估算初取值,再进行校核,最后确定各个实际值.关键词自动化立体仓库堆垛机Automation three—dimensional storehouse is that thing flows important composition part,it is to stock and take out voluntarily under not directly carrying out the condition of artificial intervention the system that thing flows out . it is the high—tech outcome of modern industrial social development, for raise productivity and reduction cost have important meaning。
巷道式堆垛机的工作原理
巷道式堆垛机的工作原理巷道式堆垛机是一种用于仓储物流系统中的自动化设备,主要用于在狭窄的货架通道中进行货物的存储和取货操作。
它通过运行在地面上的导轨来引导垂直提升的货架车辆,从而实现高效的货物存储和取货功能。
下面将详细介绍巷道式堆垛机的工作原理。
一、巷道式堆垛机的结构组成1. 主机:巷道式堆垛机的主要组成部分,包括提升机构、行走机构、操作系统等。
提升机构用于实现货架车辆的上下运动,行走机构则用于在货架通道中的行走。
2. 货架车辆:负责携带货物进行存储和取货操作的载体,通过提升机构进行上下运动。
3. 导轨:贯穿整个货架通道,为货架车辆提供准确的行走轨迹,保证货架车辆的稳定移动。
4. 控制系统:用于控制整个巷道式堆垛机的运行,包括对提升机构、行走机构等的控制和监控。
二、巷道式堆垛机的工作原理1. 货物存储:当需要存储货物时,首先操作人员通过控制系统指令将货架车辆驶入目标货架通道,车辆驶至目标位置后,提升机构开始上升,抬起货物直至到达目标存储位,同时货架车辆开始退行,直至退出货架通道,完成一次存储任务。
2. 货物取出:当需要取货时,操作人员通过控制系统指令将货架车辆驶入目标货架通道,车辆停至目标位置后,提升机构开始下降,负责提升货物至合适高度,然后通过横移机构将货物横移到提取位置,完成一次取货操作。
3. 巡航巷道:在货架通道操作过程中,巷道式堆垛机通过导轨实现高精度的导航。
在控制系统的指令下,行走机构将货架车辆沿着指定路线准确行进,同时具有防撞功能,保证安全移动。
4. 控制系统:整个巷道式堆垛机的工作过程都由控制系统控制,操作人员通过控制系统进行操作指令的下达,监控巷道式堆垛机的运行状态,以及对故障进行排除和维护。
控制系统保证了整个设备的正常运行。
三、巷道式堆垛机的特点1. 高效性:巷道式堆垛机能够在狭窄的货架通道中进行存取货物操作,节省了货物存储空间,提高了仓储的存储效率。
2. 自动化:巷道式堆垛机通过控制系统的指令实现自动化操作,减少了人工操作的时间和成本,并提高了操作的精度和准确性。
物流配送中心的有轨巷道式堆垛机

2.2 运行机构 运行机构驱动堆垛机沿运行轨道水平运动, 运行机
构 由 电 机 减 速 器 、行 走 轮 、导 向 轮 等 组 成 。 在 下 横 梁 下 面 安装行走轮,在行走轮侧面有导向轮,保证堆垛机能够在 地轨上正常行驶。轴装式电机减速器安装在前面的行走 轮上,当切断电机电源时,电机能够自动制动,使堆垛机 停止在立体库的巷道中。 2.3 起升机构
中图分类号:TP 29
文 献 标 识 码 :B
文章编号:1002- 2333( 2006) 06- 0073- 02
1引言 堆 垛 机 是 自 动 化 立 体 仓 库 中 最 重 要 的 搬 运 、起 重 、堆
垛 设 备 ,它 担 负 着 出 库 、进 库 、盘 库 等 任 务 。本 文 即 主 要 介 绍在物流配送中心的立体仓库中所应用的有轨巷道式堆 垛机的工作原理及设计要点。 2 堆垛机的结构及工作原理
堆 垛 机 的 机 架 是 由 立 柱 、上 横 梁 、下 横 梁 组 成 的 长 方 形 结 构 框 架 ,是 堆 垛 机 的 主 要 承 载 构 件 。为 了 便 于 安 装 零 件和 减 轻 堆 垛 机 重 量 ,上 、下 横 梁 用 槽 钢制 作 ,立 柱 用 方 通制作。机架沿天轨运行,为防止框架倾倒,在上横梁上 装有导向轮。它的上部安装滑轮或链轮机构、上水平导 轮 、电 缆 拖 挂 机 构 或 滑 触 线 供 电 装 置 。中 部 或 下 部 安 装 起 升机构,立柱内侧安装升降导轨,使载货台平稳地上升及 下 降 。立 柱 外 侧 装 有 维 修 爬 梯 便 于 维 修 ,下 部 安 装 主 动 及 被动 车 轮 、运 行 驱 动 装 置 及 下 水 平 导 轮、缓 冲 器 等 部 件 。 后部和两侧安装有电器控制柜、上升及下降终端限位开 关和选层认址板等部件。
有轨巷道堆垛起重机

有轨巷道堆垛起重机有轨巷道堆垛起重机,是立体仓库中最重要的起重运输设备,是代表立体仓库特征的标志。
其主要用途是在高层货架仓库的巷道内沿轨道运行,将位于巷道口的货物存入货格;或者相反,取出货格内的货物运送到巷道口,完成出入库作业。
有轨巷道堆垛机分类方式多种多样,在目前立体仓库应用中,堆垛机最常见的是按结构形式和运行轨迹分类。
堆垛机是整个自动化立体仓库的核心设备,通过手动操作、半自动操作或全自动操作实现把货物从一处搬运到另一处。
它由机架、水平行走机构、提升机构、载货台、货叉及电气控制系统构成。
从结构形式上区别,目前立体仓库中堆垛机有双立柱结构和单立柱结构。
双立柱结构的堆垛机机架由两根立柱和上横梁、下横梁组成一个长方形框架。
立柱形式有方管和圆管。
方管兼作起升导轨,圆管附加起升导轨。
双立柱堆垛机的最大优点就是强度和刚性都比较好,并且运行平稳。
一般对于起重高度较高、起重量较大和水平运行速度高的立体仓库堆垛机多采用双立柱结构。
双立柱堆垛机的起升机构,普遍采用链条传动,由电机减速机驱动链轮转动,通过链条引载货台沿立柱或起升机导轨作升降运动。
由于链条牵引载货台或配重装置,受空间尺寸限制,传动和布置较复杂,但定位较准确。
单立柱结构的堆垛机机架由一根立柱和下横梁组成。
立柱多采用较大的H型钢或焊接制作,立柱上附加导轨。
整机重量较轻,消耗材料少,因此制造成本相对较低,但刚性稍差。
由于载货台及货物对立柱的偏心作用,以及行走、制动时产生的水平惯性力作用,使单立柱堆垛机在使用上有局限性。
不适于起重重量大和水平运行速度高的堆垛机。
单立柱堆垛机的起升结构,普遍采用钢丝绳传动,由电机减速机驱动卷筒转动,通过钢丝绳牵引载货台沿立柱或起升钢轨作升降运动。
对于钢丝绳传动,传动和布置相对容易,但定位准确性稍差。
堆垛机水平驱动装置一般安装在堆垛机下横梁上,通过电机减速机驱动车轮转动,使堆垛机沿水平方向运行。
此种地面驱动方式使用最为普遍。
一般采用两个承重车轮,沿敷设在地面上的轨道(通常亦叫做地轨)运行。
有轨巷道高精度堆垛机[实用新型专利]
![有轨巷道高精度堆垛机[实用新型专利]](https://img.taocdn.com/s3/m/7e3e7ae53086bceb19e8b8f67c1cfad6185fe97e.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 202020219385.1(22)申请日 2020.02.27(73)专利权人 长沙和自晟智能科技有限公司地址 410000 湖南省长沙市经济开发区泉塘街道人民中路二段189号中部智谷2栋103、104室(72)发明人 程阳选 段群芳 (51)Int.Cl.B66F 9/07(2006.01)B66F 9/20(2006.01)B66F 9/12(2006.01)(54)实用新型名称有轨巷道高精度堆垛机(57)摘要本实用新型提供一种有轨巷道高精度堆垛机。
所述有轨巷道高精度堆垛机包括布置于地面的水平运动机构、设于所述水平运动机构的立柱、沿所述立柱长度方向布置的垂直运动机构、设于所述垂直运动机构的载货台、沿所述载货台长度方向布置的伸缩货叉机构,其特征在于:所述水平运动机构、所述垂直运动机构、所述伸缩货叉机构,均包括平行的设置的滑轨、齿条,可滑动的安装于所述滑轨的基座,以及固定于所述基座,与所述齿条通过齿轮连接的驱动机构。
本实用新型提供的所述有轨巷道高精度堆垛机解决了现有技术的堆垛机的间隙误差大的技术问题。
权利要求书1页 说明书3页 附图3页CN 212403375 U 2021.01.26C N 212403375U1.一种有轨巷道高精度堆垛机,包括布置于地面的水平运动机构、设于所述水平运动机构的立柱、沿所述立柱长度方向布置的垂直运动机构、设于所述垂直运动机构的载货台、沿所述载货台长度方向布置的伸缩货叉机构,其特征在于:所述水平运动机构、所述垂直运动机构、所述伸缩货叉机构,均包括平行的设置的滑轨、齿条,可滑动的安装于所述滑轨的基座,以及固定于所述基座,与所述齿条通过齿轮连接的驱动机构;所述立柱设于所述水平运动机构的所述基座,所述载货台设于所述垂直运动机构的所述基座。
2.根据权利要求1所述的有轨巷道高精度堆垛机,其特征在于:所述水平运动机构包括平行的依次设置于地面的二条水平滑轨、水平齿条;还包括长条形的水平基座,其底面固定有多个滑块,与所述水平滑轨可滑动的连接;所述水平基座的外侧固定有相连的电机、减速机,减速机的输出轴与所述水平齿条的齿面可传动的连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2)总起重量Gt:货物、托盘、货叉、司机室、载货台、属具、 总起重量Gt:货物、托盘、货叉、司机室、载货台、属具、 Gt 人的质量的总和。 人的质量的总和。 (3)堆垛机总重量Go:堆垛机各部分质量的总和。 堆垛机总重量Go:堆垛机各部分质量的总和。 Go (4)堆垛机设计重量Gk:除去润滑剂的堆垛机质量。 堆垛机设计重量Gk:除去润滑剂的堆垛机质量。 Gk (5)轮压Po:一个车轮传递到地面或轨道上的最大垂直载荷。 轮压Po:一个车轮传递到地面或轨道上的最大垂直载荷。 Po
无轨堆垛机(高架叉车) 无轨堆垛机(高架叉车)
无轨巷道堆垛机又称为高架 无轨巷道堆垛机又称为高架 又称为 叉车,是一种变形叉车。 叉车,是一种变形叉车。其机 动性比巷道式堆垛机好。 动性比巷道式堆垛机好。无轨 巷道式堆垛机可分为上人式 上人式和 巷道式堆垛机可分为上人式和 不上人式两种 两种, 不上人式两种,驾驶舱随门架 同时上升称为上人式, 同时上升称为上人式,优点是 在任何高度都可以保持水平操 作视线, 作视线,保证最佳视野以提高 操作安全性。 操作安全性。同时由于操作者 可以触及货架任何位置的货物, 可以触及货架任何位置的货物, 故可以同时用于拣货及盘点作 业 。
货叉装置是堆垛机存取货物的执行机构,装设在堆垛机载货台上。 货叉装置是堆垛机存取货物的执行机构,装设在堆垛机载货台上。 货叉可以横向伸缩,以便向两侧货格送入(或取出)货物。 货叉可以横向伸缩,以便向两侧货格送入(或取出)货物。货叉根据 其叉子的数量不同,可分为单叉货叉、双叉货叉和多叉货叉。 其叉子的数量不同,可分为单叉货叉、双叉货叉和多叉货叉。最常见 的是前两种,多叉货叉多用于特长货物的堆垛。 的是前两种,多叉货叉多用于特长货物的堆垛。 货叉一般采用三级直线差动式伸缩货叉,由上叉、中叉、 货叉一般采用三级直线差动式伸缩货叉,由上叉、中叉、下叉 固定叉)及起导向作用的滚针轴承等组成,以减少巷道的宽度, (固定叉)及起导向作用的滚针轴承等组成,以减少巷道的宽度,且 使之具有足够的伸缩行程。货叉的动作包括伸叉、微起升( 使之具有足够的伸缩行程。货叉的动作包括伸叉、微起升(或微下 ),收叉三个动作 货叉伸出(或收回)动作时, 收叉三个动作, 降),收叉三个动作,货叉伸出(或收回)动作时,其速度也为双档 变速。货叉伸缩速度一般为15m/min以下,高的可达 30m/min,在超 以下, 变速。货叉伸缩速度一般为 / 以下 / , 时需配备慢速挡, 过 10m/min时需配备慢速挡,在启动和制动时用。 / 时需配备慢速挡 在启动和制动时用。
三、载货台及取物装置 取物装置:根据托盘的形状, 取物装置:根据托盘的形状,单元货物的尺寸与重量 目前已设计出了各种取货装置,包括人力取货, 等。目前已设计出了各种取货装置,包括人力取货, 采用电磁或真空吸盘的存取装置, 采用电磁或真空吸盘的存取装置,利用动力输送机的 存取装置, 存取装置,利用机械手的取货装置以及最普遍的伸缩 货叉装置等,而最常用的是伸缩货叉取货装置 伸缩货叉取货装置。 货叉装置等,而最常用的是伸缩货叉取货装置。
起重量2t以下 自重轻 刚度差 起重量 以下
刚度好、 起重量可达5t 刚度好、速度快 起重量可达
3、按作业方式分 、 是对托盘单元进行出入库作业的堆垛机。 (1)单元式堆垛机 是对托盘单元进行出入库作业的堆垛机。 ) 是由操作人员向(或从)货格内的托盘( (2)拣选式堆垛机 是由操作人员向(或从)货格内的托盘(或 ) 货箱)中存入(或取出)少量货物,进行出入库作业的堆垛机。 货箱)中存入(或取出)少量货物,进行出入库作业的堆垛机。这 种堆垛机的特点是没有货叉。 种堆垛机的特点是没有货叉。 (3)拣选-单元混合式堆垛机 具有单元式与拣选式综合功能的 )拣选-单元混合式堆垛机 堆垛机。其载货台上既有货叉装置,又有司机室, 堆垛机。其载货台上既有货叉装置,又有司机室,可以满足两种作 业方式的要求。 业方式的要求。
时需配备慢速挡, 在超过 10m/min时需配备慢速挡,在启动和制动时用。 / 时需配备慢速挡 在启动和制动时用。
1)、最优行走速度: ) 最优行走速度:
Vx一堆垛机的走行速度 一堆垛机的走行速度(m/s); ; ax一堆垛机的行走加减速度(m/s2); 一堆垛机的行走加减速度( / L一堆垛机工作货架的长度 。 一堆垛机工作货架的长度(m)。 一堆垛机工作货架的长度 2)、最优升降速度: ) 最优升降速度:
无轨堆垛机 起重能力: 起重能力:1000㎏ 12米 堆高:5-12米
有轨巷道式堆垛机与无轨巷道堆垛机比较: 有轨巷道式堆垛机与无轨巷道堆垛机比较: (1)有轨巷道式堆垛机采用钢轮在钢轨上运行,无轨 )有轨巷道式堆垛机采用钢轮在钢轨上运行, 堆垛机采用轮胎, 堆垛机采用轮胎,因此轮压不同时会产生不同的变 形量; 形量;
H V y ≈ ⋅ Vx L
Vy-升降速度(m/s); 升降速度( ) H-堆垛机工作货架的高度(m); -堆垛机工作货架的高度( )
3)最优货叉伸缩速度: )最优货叉伸缩速度: Vz ≈ 0.5 B×az 式中: 式中: vz-货叉的伸缩速度(m/s); -货叉的伸缩速度( )
az-货叉伸缩的加减速度(m/s2); -货叉伸缩的加减速度( /
2、速度参数
左右, 水平运行速度:行走速度80m/min左右,也有 左右 也有120m/min, , 水平运行速度:行走速度 最高可达180m/min; ; 最高可达 货物容易散落或载人的堆垛机的加减速度一般为0.3- 货物容易散落或载人的堆垛机的加减速度一般为 -0.5m/s2; 对于货物不易散落的堆垛机,其加减速度应在l m/s2以下; 以下; 对于货物不易散落的堆垛机,其加减速度应在
三、有轨巷道式堆垛机的分类
1. 按支承方式分 悬挂式堆垛机 : 其行走机构安装在堆垛机门架的 上部,地面上也铺设有导轨。 上部,地面上也铺设有导轨。
地面支承式堆垛机:行走轨道铺设于地面上, 地面支承式堆垛机:行走轨道铺设于地面上,上部导轮 用来防倾倒或摆动。 用来防倾倒或摆动。
2、按结构形式分 、 单立柱堆垛机 双立柱堆垛机
起升机构
货物单元承接装置通过 钢丝绳或链条与起升机构 联接。 联接。载货台可沿着立柱 导轨上下升降。 导轨上下升降。取货装置 安装在载货台上, 安装在载货台上,有司机 室的堆垛机,司机室一般 室的堆垛机, 也在载货台上。 也在载货台上。
二、运行机构 运行机构是堆垛机水平运行的驱动装置。一般由电动机、 运行机构是堆垛机水平运行的驱动装置。一般由电动机、 电动机 组成。 联轴器、制动器、减速箱和行走车轮组成 联轴器、制动器、减速箱和行走车轮组成。行走轮结构分有 轮缘和无轮缘两种结构,有轮缘的车轮, 两种结构 轮缘和无轮缘两种结构,有轮缘的车轮,当堆垛机货叉作业 会对车轮产生啃轨力。所以为防止啃轨现象, 时,会对车轮产生啃轨力。所以为防止啃轨现象,多采用无 轮缘车轮,并在下横梁底部安装侧面导向轮。 轮缘车轮,并在下横梁底部安装侧面导向轮。
一、升降机构 是使载货台垂直运动的机构。一般由电动机、制 是使载货台垂直运动的机构。一般由电动机、 电动机 动器、减速机、滚筒或轮以及柔性件组成。 动器、减速机、滚筒或轮以及柔性件组成。常用的 或轮以及柔性件组成 柔性件有钢丝绳和起重链两种。 柔性件有钢丝绳和起重链两种。除了一般的齿轮减 速机外,由于需要比较大的速比,因而采用蜗轮蜗 速机外,由于需要比较大的速比, 杆减速机和行星减速机的也不少。 杆减速机和行星减速机的也不少。起重链传动装置 多数装在上部,常配有平衡重块,以减小提升功率。 多数装在上部,常配有平衡重块,以减小提升功率。 为了使起升机构结构紧凑, 为了使起升机构结构紧凑,常常使用带制动器的电 机。
伸缩货叉的结构形式主要有两种:齿轮齿条及链传动。 伸缩货叉的结构形式主要有两种:齿轮齿条及链传动。
这两种传动方式各有其优缺点:齿轮传动的传动精度较高, 这两种传动方式各有其优缺点:齿轮传动的传动精度较高, 精度较高 定位准确,但是齿轮传动方式的齿条加工困难 齿轮传动方式的齿条加工困难, 定位准确,但是齿轮传动方式的齿条加工困难,装配精度 虽然精度不高, 要求很高;而链传动方式虽然精度不高 要求很高;而链传动方式虽然精度不高,但加工装配都比 较容易。 较容易。
B-货架宽度(m)。 -货架宽度( )。
堆垛机的性能参数 堆垛机起重量系列标准
型 式 拣选型 单元型和拣选—-单元混合型 额定起重量 0.1 0.25 0.1 0.25 0.5 1 1.6 2
当单元货物的重量大于2吨时,其起重量系列应符合GB 783的轨定
堆垛机运行、 堆垛机运行、起升和货叉伸缩速度系列
3、取物装置复杂。堆垛机配备有特殊的取物装置, 、取物装置复杂。堆垛机配备有特殊的取物装置, 常用的有伸缩货叉、 常用的有伸缩货叉、伸缩平板和可对物料箱或特殊形 状货物作业的机械手,工作时,能对两侧货架作业, 状货物作业的机械手,工作时,能对两侧货架作业, 存取货物。 存取货物。 4、堆垛机的电力拖动系统要同时满足快速、平稳和 、堆垛机的电力拖动系统要同时满足快速、 快速 准确三个方面的要求 三个方面的要求。 准确三个方面的要求。 5、安全要求高。必须配备齐全的安全装置,并在电 、安全要求高。必须配备齐全的安全装置, 器控制上采取一系列连锁和保护措施。 器控制上采取一系列连锁和保护措施。
(2)有轨堆垛机采用立柱,无轨堆垛机采用多极门架, )有轨堆垛机采用立柱,无轨堆垛机采用多极门架, 货叉在水平和垂直方向上的定位精度不同。 货叉在水平和垂直方向上的定位精度不同。
二、有轨巷道式堆垛机的特点
1、整机结构高而窄。采用有轨巷道式堆垛机的 、整机结构高而窄。 高架仓库货架很高,而货架巷道非常狭窄, 高架仓库货架很高 , 而货架巷道非常狭窄 , 堆 垛机的宽度一般只与所搬运的单元货物的宽度 相等。 相等。 2、结构的刚度和精度要求高。堆垛机的金属结 、结构的刚度和精度要求高。 构设计除需满足强度要求外, 结构的静刚度、 构设计除需满足强度要求外 , 结构的静刚度 、 动刚度是一项非常重要的指标。 制动时, 动刚度是一项非常重要的指标 。 制动时 , 机架 顶端水平位移一般要求不超过20mm,结构振动 顶端水平位移一般要求不超过 , 衰减时间要短。 衰减时间要短 。 载货台在立柱上的升降导轨的 不垂直度一般要求不超过3~ 不垂直度一般要求不超过 ~5mm。 。