助力机械手刹车气缸
大型机械设备螺栓拆装辅助机械臂设计

河 北 水 利 电 力 学 院 学 报JournalofHebeiUniversityof WaterResourcesandElectricEngineering2021年3月第31卷第1期Mar2021Vol31 No1文章编号 2096 — 5680(2021)01 — 0051 — 05大型机械设备螺栓拆装辅助机械臂设计周利杰12,3,刘 辉12,3,高 波1,郝瑞林1,23,石 岩12,3(1.河北水利电力学院 电气工程学院,河北省沧州市重庆路1号061001;2. 河北省工业机械手控制与可靠性技术创新中心,河北省沧州市重庆路1号061001;3. 沧州市工业机械手控制与可靠性技术创新中心,河北省沧州市重庆路1号061001)摘要:大型机械设备在维修过程中存在着作业点位置高、作业点分散、螺栓拆装工具重量大、维修人员劳动强度高的特点,维修效率低;本文设计了一种螺栓拆装辅助机械臂,该装备主要由助力机械臂、电控液压升降平台、电驱动模块和支撑装置组成。
助力机械臂集成气弹簧实现助力功能,可补偿螺栓拆装工具的自重,减少维修人员的劳动强度;助力机械臂采用两段臂 的设计,可360度旋转和上下移动,作业范围大;机械臂集成液压升降平台和电驱动模块,可实现高位置点的螺栓拆装作业,并且移动灵活,可有效提升维修效率;支撑装置可在高空维修作业过程中提供稳定的支撑。
该装备结构简单、操作方便、适用性强,可应用于工程机械、矿山机械、大型车辆等大型机械设备的螺栓拆装作业。
关键词:螺栓拆装;助力机械臂;升降平台;电驱动中图分类号:TH122 文献标识码:A DOI : 10. 16046/j. cnki. issn2096-5680. 2021. 01. 010大型机械设备具有生产效率高、装载能力强、工 作稳定可靠、工作环境恶劣、维修难度大的特点,主 要应用于煤矿开采、工程建设、物资运输、石油化工、水电等领域。
这些大型机械设备由于长时间高负荷工作在恶劣环境中,经常会发生各种形式的故障,导 致生产受阻[1]。
气动平衡助力机械手的原理及应用
气动平衡助力机械手的原理及应用作者:谢楚军来源:《知音励志·教育版》2017年第04期摘要:气动平衡助力机械手是一种新型的物料搬运助力设备。
它的设计原理是利用力的平衡,达到对物品进行相应的推拉从而使得物料位置改变的目的。
本文阐述了气动平衡助力机械手操作的原理和应用,希望能为广大高中学子提供学习上的帮助。
【关键词】气动平衡;原理;应用气动平衡助力机械手是指由人力操控,气动辅助人力进行物料运输的设备。
重物在向上提升或者下降时由气路保证没有人工操作力。
操控力与物体的重量有关,操控气动平衡助力机械手的工作人员用手即可把物品准确的移到空间中的位置。
气动平衡助力机械手操作过程简单易学,在现代汽车业和专业的装配工业应用广泛,人力的劳动力度小,可搬运的物体质量大,是现代搬运业的福音。
1 气动平衡助力机械手的原理和结构正确操作气动平衡助力机械手设备对操作人员和整个生产过程发挥着重要的作用,我们需要对设备的组成和每个组成部分的工作原理进行充分的了解。
气动平衡助力机械手具有操作简单,省时省力安全度高等特点,对于提高生产中的效率和提高产品质量有着重要的作用。
1.1 气动平衡助力机械手的结构助力机械手设备主要由平衡吊主机、抓取夹具及安装结构等部分组成。
平衡吊主机是进行重物在空中保持没有重力作用的设备。
抓取夹具是进行工价抓取以及运输的设备。
安装结构是指根据要求用来支撑整套装置的部分。
不同行业对助力机械手设备的要求不一样,为了满足各个行业实现重物转移的操作,市场上推出了不同类型的平衡吊机。
根据助力机械手工作原理的不同,分为臂杆式和软索式两种,按照装置系统所采用基座不同,分为落地固定式、落地移动式、悬挂固定式、悬挂移动式、附墙式等几种方式。
气动平衡助力机械手设备分为立柱式和悬挂式两种结构,平衡助力机械手主体结构有三个转动节点,一个节点可以沿着自身的轴线转动360°,一个节点可以转动300°,另外一个节点可以自由的转动。
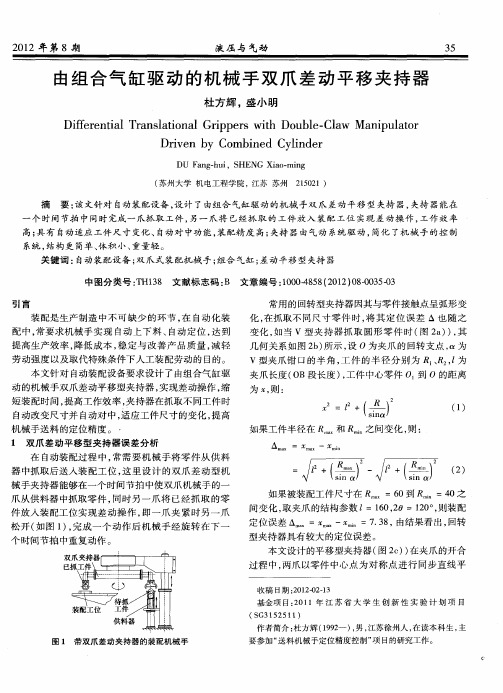
由组合气缸驱动的机械手双爪差动平移夹持器
1
作用 , 当夹持 不 同 的工 件时 , 平移 型夹 持器不 受零 件 尺
寸 变化 的影 响 , 件 中心点 始终在 同一 个位 置 , 机械 零 使 手 在夹 持零 件装 配 时能 自动对 中 、 自动定位 , 论安装 理 定位误 差 为零 , 即机 械手 可 以准确地 将零 件送 到位 , 从 而提 高装 配精 度 , 降低生 产成 本 。
自动改 变尺 寸并 自动对 中 , 应 工件 尺寸 的变 化 , 高 适 提 机 械手送 料 的定 位精 度 。 -
1 双爪 差 动平 移型 夹持 器误 差分 析
z+ 善 1 f ‘
() 1
如 果工 件半 径在 尺 和 R i之 间变化 , : 则
A =
一
m a
件 放 入装 配 工位 实现 差 动 操 作 , 即一 爪 夹 紧 时 另 一爪
=
√ )√ ) “( ( 一
如果 被装 配工 件 尺寸在 R =6 … 0到 R =4 … 0之 间 变化 , 夹爪 的结构 参数 l=10 2 取 6 ,0:10 , 2 。 则装配
松开 ( 图 1 , 如 ) 完成 一 个 动作 后 机 械 手 经 旋 转 在 下 一
个 时i =7 3 , .8 由结果 看 出 , 回转
型夹 持器 具有 较大 的定 位误 差 。
本 文设 计 的平 移 型夹持 器 ( 2 ) 在 夹爪 的开合 图 c)
过程 中 , 两爪 以零件 中心 点 为 对 称 点进 行 同步 直线 平
要参加“ 送料机械手定位精度控制 ” 目的研究工作。 项
3 6
液 压 与 气动
平行手指气缸工作原理

平行手指气缸工作原理
嘿,朋友们!今天咱来聊聊平行手指气缸这玩意儿的工作原理,可有意思啦!
你看啊,这平行手指气缸就像是一只勤劳的小手,能抓能放,可灵活啦!它里面有活塞呀,就像我们跑步比赛一样,活塞在气缸里面来回跑。
这一跑可就有了动力,有了动作。
想象一下,它就像是一个小小的大力士,虽然个头不大,但是力量可不小呢!当气压进入气缸的时候,就好像给这个大力士注入了能量,让它能干活啦!它的手指会根据气压的变化,乖乖地张开或者合拢。
比如说,我们要抓一个小零件,这时候平行手指气缸就派上用场啦。
它的手指会慢慢张开,然后轻轻地抓住小零件,就像我们用手去拿东西一样自然。
而且啊,它抓得可稳啦,不会轻易让小零件掉下来。
这平行手指气缸在很多地方都大显身手呢!在工厂的生产线上,它帮忙抓取各种物品,让生产变得更高效;在自动化设备里,它也是个得力的小助手,默默地工作着。
你说它是不是很厉害?它就像一个默默无闻的小英雄,在我们看不到的地方努力工作着。
我们的生活中有很多这样的小玩意儿,虽然不起眼,但是却起着大作用。
有时候我就想啊,要是没有这些小发明,我们的生活会变成什么样呢?肯定会有很多不方便吧!所以啊,我们真应该好好珍惜这些科技带来的便利。
平行手指气缸虽然不大,但是它蕴含的智慧可不少。
它的设计巧妙,工作原理简单却又实用。
这就是科技的魅力啊,能把复杂的事情变得简单,能让我们的生活变得更美好。
总之,平行手指气缸就是这么一个神奇的小物件,它的存在让我们的生活更加丰富多彩,让我们的工作更加轻松高效。
我们真应该为有这样的发明而感到骄傲和自豪!。
机械手气缸的运动原理是

机械手气缸的运动原理是
机械手气缸运动的原理主要涉及到气压的作用。
当气缸内部的空气压力变化时,就会驱动气缸活塞的运动。
具体来说,当气缸内部的压力增加时,气缸的活塞就会向外推动。
同时,由于气缸作为一个密闭系统,气体不能从外部进入,因此空气被压缩并存储在气缸内部,为下一次运动提供能量。
反之,当气缸内部的压力减少时,气缸的活塞就会向内移动。
这种基于气压的原理使得机械手气缸可以控制机械手的运动,并且在一定程度上可以调整机械手的速度和力度。
因此,在制造或装配领域中,机械手气缸被广泛应用,可以大大提高生产效率和质量。
刹车气缸工作原理
刹车气缸工作原理
刹车气缸是汽车刹车系统中的重要组成部分,它通过将压缩空气转化为机械能,从而实现车辆的刹车功能。
刹车气缸工作原理如下:
1. 踩下刹车踏板:当驾驶员踩下车辆的刹车踏板时,刹车踏板的运动将通过连接杆或者推杆传递给刹车总泵。
2. 压力转换:刹车总泵将由刹车踏板传递过来的力转化为液压能量。
刹车总泵内部通过一个或多个活塞的运动,将车辆上方的主油箱内的刹车液压油,通过泵体的出口压力口送入液压管路中。
3. 液压管路传递:液压刹车系统的液压管路将刹车总泵输出的液压力传递到刹车气缸。
4. 活塞运动:刹车气缸内部有一个或多个活塞,当液压力作用于气缸内部时,活塞会受到压力的挤压并向外移动。
5. 刹车力传递:当活塞向外移动时,刹车气缸内部的活塞杆与刹车蹄片相连。
通过活塞杆的伸缩,刹车蹄片将与刹车盘产生摩擦,从而减速或停止车辆的运动。
6. 释放刹车:当驾驶员松开刹车踏板时,液压刹车系统中的液压力会减小,刹车气缸内的活塞杆会收缩,使刹车蹄片与刹车盘分离,车辆恢复正常行驶。
总的来说,刹车气缸通过将液压能转化为机械能,使刹车系统能够实现对车辆的安全减速和停止。
手指气缸运用实例

手指气缸运用实例
手指气缸是一种常用的气动元件,它可以通过压缩空气的作用,实现手指的收缩和伸展动作。
手指气缸的运用非常广泛,下面就来介绍一些实例。
首先,手指气缸可以用于医疗器械中的手术机械手。
在手术中,医生需要使用机械手进行操作,手指气缸可以实现机械手的灵活收缩和伸展,使医生的操作更加精准。
其次,手指气缸可以用于机器人的手部结构中。
机器人的手部需要具备灵活的动作能力,手指气缸可以实现机器人手部的多样化运动,使机器人可以完成更加复杂的操作任务。
此外,手指气缸还可以用于工业生产中的抓取操作。
在装配线上,工人需要将物品从一个位置拿起并放到另一个位置,手指气缸可以实现机械臂的抓取和释放功能,使操作过程更加高效。
最后,手指气缸还可以用于假肢制作中。
假肢需要具备类似真实手臂的运动能力,手指气缸可以实现假肢的手指伸展和收缩,使假肢更加逼真。
综上所述,手指气缸是一种非常实用的气动元件,它可以在医疗、机器人、工业生产和假肢制作等领域中得到广泛应用。
- 1 -。
气动助力机械手工作原理

气动助力机械手工作原理
气动助力机械手是一种使用空气压缩机或气压驱动气动元件来实现动作的机械手。
其工作原理主要包括以下几个方面:
1. 压缩空气供给:通过空气压缩机将大气中的空气压缩到一定压力后,通过管路输送至气动助力机械手中。
2. 气动元件控制动作:气动助力机械手中使用了气动元件,如气缸、气动马达等,通过调节气源供给和排气,通过控制气缸的进出气,实现机械手的动作。
3. 机械结构传动:机械手的机械结构通过传动装置与气动元件连接,将气动元件的运动转化为机械手的运动,实现机械手的抓取、举升、转动等动作。
4. 控制系统控制:气动助力机械手需要通过控制系统来控制机械手的运动,可以通过手动操作、自动控制或PLC控制等方式实现。
总结来说,气动助力机械手的工作原理就是通过压缩空气供给和气动元件控制动作,实现机械手的运动,完成抓取、举升、转动等工作。
气动助力机械手说明书.

气动助力机械手 使用说明书一、概述首先感谢您选择了我公司生产的气动搬运机械手,气动搬运机械手是我公司自主研发的一款应用于生产线助力搬运的设备,此设备操作简单、使用安全可靠、维护保养方便等显著特点,只需进行简单的按钮操作即可实现工件的快速搬运,是现代生产线、仓库等最理想的搬运设备。
本机与传统电动助力机械手相比,具有结构轻巧、拆装方便、用途广泛等特点,可搬运载荷从10Kg到100Kg,满足不同用户的需要。
本产品具有以下几个显著特点:1.稳定性高,操作简单。
采用全气动控制,只需操作一个控制开关便可完成工件的搬运过程。
2.效率高,搬运周期短。
搬运开始后,操作者用较小的力便可控制工件在空间中的运动,并且可在任意位置停止,搬运过程轻松、快捷、连贯。
3.安全性能高,设置了断气保护和工件检测。
当气源压力突然消失时,工件会保持在原位置而不下落。
挂钩上没有工件时,有载开关无法启动,避免操作端突然升起,保护操作者的安全。
4.主要元器件均采用国际知名品牌产品,质量有保证。
本使用说明书详细说明了其使用方法及注意事项,为更好的操作设备,使用前请仔细阅读本说明书并妥善保管。
二、性能参数作业半径:700~2500mm升降幅度:1300mm水平旋转角度:0~350°挂钩旋转角度:360°额定载荷:30Kg工作压力:0.5Mpa三、构造原理简介本套助力机械手系统采用全气动控制来搬运工件,其主体由支座、动力机构、连杆组、吊钩、气动控制系统组成,如图一所示,简介如下:1.支座2.动力机构3.气动控制系统4.连杆组5.吊钩图一气动助力机械手的组成1.支座:支撑整个机械臂并带有旋转功能,根据要求可在规定范围内旋转。
支座用4个M20膨胀螺栓固定在地面上。
2.动力机构:由气缸推动滑块运动,实现操作端的升降运动。
3.连杆组:平行四边形的杆机构依靠气缸和平衡块实现任意位置的平衡停止,可使连杆组操作端在1800mm的水平范围,最大半径2500mm,最小半径700mm,竖直升程1300mm的范围内运动。
气动手指分类、手指气缸特性
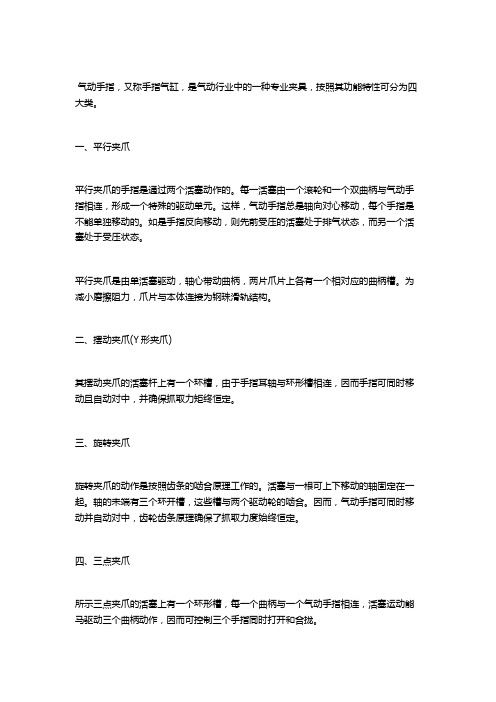
气动手指,又称手指气缸,是气动行业中的一种专业夹具,按照其功能特性可分为四大类。
一、平行夹爪
平行夹爪的手指是通过两个活塞动作的。
每一活塞由一个滚轮和一个双曲柄与气动手指相连,形成一个特殊的驱动单元。
这样,气动手指总是轴向对心移动,每个手指是不能单独移动的。
如是手指反向移动,则先前受压的活塞处于排气状态,而另一个活塞处于受压状态。
平行夹爪是由单活塞驱动,轴心带动曲柄,两片爪片上各有一个相对应的曲柄槽。
为减小磨擦阻力,爪片与本体连接为钢珠滑轨结构。
二、摆动夹爪(Y形夹爪)
其摆动夹爪的活塞杆上有一个环槽,由于手指耳轴与环形槽相连,因而手指可同时移动且自动对中,并确保抓取力矩终恒定。
三、旋转夹爪
旋转夹爪的动作是按照齿条的啮合原理工作的。
活塞与一根可上下移动的轴固定在一起。
轴的未端有三个环开槽,这些槽与两个驱动轮的啮合。
因而,气动手指可同时移动并自动对中,齿轮齿条原理确保了抓取力度始终恒定。
四、三点夹爪
所示三点夹爪的活塞上有一个环形槽,每一个曲柄与一个气动手指相连,活塞运动能马驱动三个曲柄动作,因而可控制三个手指同时打开和合拢。
东莞天凡长期供应各类机械手专用气缸,夹具,无杆气缸、油压缓冲器,稳速器,吸盘,真空发生器,电磁阀,过滤器,快速接头等气动元件等。
气动助力机械手的平衡原理分析与故障排除

气动助力机械手的平衡原理分析与故障排除摘要:气动助力机械手又称平衡器、平衡环、气动助力器等,由于其具有省事,省力的特点,被广泛应用于现代工业中的各个领域,如:大型物料的移载,搬运,大型设备的精确定位、装配等场合,总之,在现代生产中,无论原料的接受还是半成品的加工、生产、配送等环节,气动机械手都发挥着不可替代的作用。
基于此,本文主要对气动助力机械手的平衡原理与故障排除进行分析探讨。
关键词:气动助力机械手;平衡原理;故障排除1、气动助力机械手的组成气动助力机械手的重要组成是:平衡装置、气动系统、安全系统和操作系统。
操作系统由夹具,操作手柄和操作气路组成,它将硅棒夹紧,是机械手的手臂。
它的复杂程度决定了机械手的复杂程度;它的人性化程度决定了机械手的成败。
安全系统由多个回转关节的刹车,限位,安全气路及外保护组成,它使机械手安全可靠。
平衡装置是机械手的主体,是实现力平衡的主要机构。
它由气动系统由平衡气路,负载负荷转换逻辑气路,操作气路和安全气路组成。
是实现力平衡的主要动力源。
平衡气路用于平衡夹具和硅料的重量,负载负荷转换逻辑气路使机械手在有载,无载状态下均可实现平衡。
操作者始终处于轻松的工作状态,它是机械手的灵魂。
2、气动助力机械手平衡功能的工作原理通过阅读气动原理图(图1),助力机械手的“初定位”、“翻转”、“刹车”动作较易理解,文章不再叙述,重点分析“加载”、“夹紧”,以及“放松”后“空载”状态实现的工作原理。
图1 气动原理图2.1重力平衡气缸的空载压力与加载压力“重力平衡气缸”的压力由一个外控式减压阀9控制,进入重力平衡气缸的压力将由该外控式减压阀的压力实现控制。
外控式减压阀的控制气路连接到梭阀13,梭阀的两端分别直通到减压阀11以及间接通过阀3连通到减压阀12。
图中减压阀11常通,可知减压阀11调定的是“空载”压力,减压阀12调定的是“加载”压力。
“空载”压力与“加载”压力切换时,起作用的是阀3的通断,当阀3的非弹簧位起作用时,通过减压阀12与通过减压阀11的气体同时进入梭阀13的两端,因为调定“加载”压力的减压阀12压力一定高于调定“空载”的减压阀11的压力,根据梭阀工作时取输入高压作为输出的原理,通过减压阀12的“加载”压力进入外控式减压阀9的控制口,“重力平衡气缸”得到的是“加载”压力状态。
萨博机器人工具气缸参数说明解读

气缸说明书1、三爪平行手指气缸(SGA)规格及性能表2、 两爪平行手指气缸(SGB 方形)3、两爪平行手指气缸(SGE圆形)4、通用旋转气缸(SURA圆形)7、中心补偿装置(SACA)8、防碰撞保护装置(SCPA)9、防水、防尘三爪平行手指气缸(SGA -- S)规格及性能表10、防水、防尘两爪平行手指气缸(SGB -- S方形)11、大直径两爪平行手指气缸(SGB – B方形)12、两爪平行手指气缸带导轨(SGB—G)13、两爪张角手指气缸带自锁型(SGC—AL)读书的好处1、行万里路,读万卷书。
2、书山有路勤为径,学海无涯苦作舟。
3、读书破万卷,下笔如有神。
4、我所学到的任何有价值的知识都是由自学中得来的。
——达尔文5、少壮不努力,老大徒悲伤。
6、黑发不知勤学早,白首方悔读书迟。
——颜真卿7、宝剑锋从磨砺出,梅花香自苦寒来。
8、读书要三到:心到、眼到、口到9、玉不琢、不成器,人不学、不知义。
10、一日无书,百事荒废。
——陈寿11、书是人类进步的阶梯。
12、一日不读口生,一日不写手生。
13、我扑在书上,就像饥饿的人扑在面包上。
——高尔基14、书到用时方恨少、事非经过不知难。
——陆游15、读一本好书,就如同和一个高尚的人在交谈——歌德16、读一切好书,就是和许多高尚的人谈话。
——笛卡儿17、学习永远不晚。
——高尔基18、少而好学,如日出之阳;壮而好学,如日中之光;志而好学,如炳烛之光。
——刘向19、学而不思则惘,思而不学则殆。
——孔子20、读书给人以快乐、给人以光彩、给人以才干。
——培根。
手指气缸运用实例
手指气缸运用实例
手指气缸是一种常用的气动元件,具有快速、可靠、灵活等特点,广泛应用于自动化生产线和机器人等领域。
下面是手指气缸运用实例: 1. 自动化生产线上的零件夹持:手指气缸可以通过快速收缩和
释放来夹持零件,实现自动化生产线的高效运作。
2. 半导体加工设备的芯片夹持:手指气缸可以精确控制夹持力
度和夹持位置,保证芯片在加工过程中的稳定性和精度。
3. 机器人的抓取功能:手指气缸可以作为机器人的手指,实现
抓取、拾取、放置等动作,广泛应用于自动化加工、仓储物流等领域。
4. 实验室仪器的自动操作:手指气缸可以通过与电磁阀、传感
器等组合,实现实验室仪器的自动操作,提高实验效率和精度。
5. 医疗设备的手术操作:手指气缸可以通过可控的夹持力度和
位置,实现医疗设备的手术操作,提高手术精度和安全性。
通过以上实例可以看出,手指气缸具有广泛的应用领域和功能,是实现自动化和智能化的重要元件之一。
- 1 -。
气动机械手气缸选用计算与校核问题论文
毕业设计(论文)题目:气动机械手的设计学生姓名:学号:学部(系):专业年级:指导教师:职称或学位:2012 年 6 月 29 日目录摘要 (3)第一章前言1.1机械手概述 (4)1.2机械手的组成和分类 (4)1.2.1机械手的组成.......................................41.2.2机械手的分类.......................................6第二章机械手的设计方案2.1机械手的坐标型式与自由度.............................. 82.2机械手的手部结构方案设计.............................. 82.3机械手的手腕结构方案设计.............................. 92.4机械手的手臂结构方案设计...............................92.5机械手的驱动方案设计...................................92.6机械手的控制方案设计...................................92.7机械手的主要参数.......................................92.8机械手的技术参数列表...................................9第三章手部结构设计3.1夹持式手部结构.........................................113.1.1手指的形状和分类.................................113.1.2设计时考虑的几个问题.............................143.1.3手部夹紧气缸的设计...............................14第四章手腕结构设计4.1手腕的自由度.......................................... 194.2手腕的驱动力矩的计算.................................. 194.2.1手腕转动时所需的驱动力矩........................ 204.2.2回转气缸的驱动力矩计算...........................22第五章手臂伸缩,升降,回转气缸的设计与校核5.1手臂伸缩部分尺寸设计与校核.............................235.1.1尺寸设计.........................................235.1.2尺寸校核.........................................245 .1 .3导向装置.......................................255 .1 .4平衡装置.......................................255.2手臂升降部分尺寸设计与校核.............................265.2.1尺寸设计.........................................26.5.2.2尺寸校核.........................................265.3手臂回转部分尺寸设计与校核.............................275.3.1尺寸设计.........................................275.3.2尺寸校核.........................................27第六章机械手的PLC控制设计...................................27 6.1可编程序控制器的选择及工作过程.........................276.1.1可编程序控制器的选择.............................276.1.2可编程序控制器的工作过程.........................276.2可编程序控制器的使用步骤...............................23第七章结论....................................................24 致谢...........................................................29 参考文献.......................................................30 专业相关的资料.................................................31摘要在设计机械手臂座的时候,用两个电机提供动力。
制动气缸工作原理

制动气缸工作原理
制动气缸是汽车制动系统中的重要部件,它通过施加力量来推动制动器,从而实现制动效果。
其工作原理如下:
1. 气压传递:制动气缸通常由主缸和从缸组成,通过气路系统中的气压传递来实现制动。
当驾驶员踩下制动踏板时,主缸内的液压油被压缩,产生一定的压力,并通过连接管路和活塞将压力传递到从缸。
2. 活塞运动:从缸内的活塞受到压力的作用,开始向外运动。
当活塞运动时,会推动连接杆或其他传动机构,进一步传递力量给制动器。
这样,制动器就会被拉紧或压紧,实现制动的效果。
3. 制动器工作:制动气缸的作用是将力量传递给制动器,而制动器则具体实施制动。
例如,对于液压制动系统,制动气缸的力量会传递给制动盘或制动鼓,使制动垫或制动鞋与其接触,并产生摩擦力来减速或停止车辆。
4. 松开制动:当驾驶员松开制动踏板时,制动气缸的压力减小或消失,从缸内的活塞会回到初始位置。
此时,制动器也会松开,车辆恢复正常的行驶状态。
总的来说,制动气缸通过气压传递的方式,将驾驶员踩下制动踏板所产生的力量传递给制动器,从而实现车辆的制动效果。
机械手气缸拆卸方法

机械手气缸拆卸方法
机械手气缸的拆卸步骤如下:
1. 先将机械手臂断电,断开气源管路,拆下气缸与机械手臂连接的螺丝。
注意,拆卸前需要记录好气缸的位置和方向,以便于后续安装时正确接线。
2. 如果活塞环弹力减弱,应更换活塞环。
3. 如果活塞环被粘在活塞环槽内,可用三角刮刀拨开、修锉好,然后再将它装入活塞环槽内,使之转动自如。
4. 如果气门头与气门座贴合不严密,且烧蚀不严重,可重新研磨,然后用煤油清洗干净,再用煤油检查,证明密封良好。
5. 如果气门座圈松动,应更换气门座圈。
以上步骤完成后,机械手气缸的拆卸就完成了。
在拆卸过程中,需要注意安全,避免对设备造成进一步的损坏。
同时,对于拆卸下来的零件,需要妥善保管,以便后续的安装和维修。
液压刹车助力器工作原理

液压刹车助力器工作原理今天咱们来唠唠汽车里超酷的液压刹车助力器的工作原理。
这东西可神奇了,就像一个隐藏在幕后的小超人,默默在你踩刹车的时候帮大忙呢。
你想啊,当你开车在路上,突然前面有个状况,你一脚踩下刹车踏板。
要是没有这个液压刹车助力器,那可就费劲啦。
你得使好大的劲儿,就像要搬动一座小山似的。
可是有了它呀,你轻轻一踩,刹车就很灵敏地起作用了。
那它到底是咋工作的呢?咱先得知道它的构造。
液压刹车助力器里面有好多小零件,就像一个小团队一样。
有活塞、有油腔,还有一些阀门之类的东西。
这些小零件就像是一群小伙伴,各有各的分工。
当你踩下刹车踏板的时候,就像是给这个小团队下达了一个命令。
踏板的力量会通过一个杠杆之类的装置传递到助力器里面。
这时候呀,助力器里的活塞就开始行动啦。
活塞就像一个勤劳的小工人,它在油腔里开始移动。
油腔里可是装满了液压油的哦,这液压油就像是魔法药水一样。
活塞一动,就会挤压液压油。
这液压油可调皮了,它会根据活塞的压力,通过一些特别设计的通道和阀门跑来跑去。
就好像是一群小蚂蚁,按照规定好的路线搬家一样。
这时候呢,液压油的压力就会被放大。
为啥会放大呢?这就像是一个小小的力量被一群小伙伴齐心协力地传递和加强。
这个放大后的压力就会被传递到刹车系统的其他部分,比如说刹车片那里。
刹车片就像是两个小爪子,平时安安静静的,一接到这个强大的压力命令,就猛地扑向刹车盘。
刹车盘呢,就像是一个大圆盘在那等着被抓住。
当刹车片紧紧抱住刹车盘的时候,车轮就会慢慢停下来啦。
你看,整个过程就像是一场精心编排的舞蹈。
每个小零件都按照自己的节奏和动作来完成任务。
液压刹车助力器就像是一个指挥家,把你轻轻踩下踏板的小力量,变成了足以让汽车稳稳停下来的大力量。
而且啊,这个液压刹车助力器还特别聪明呢。
它能够根据你踩踏板的力度来调整自己的助力大小。
如果你只是轻轻点一下刹车,它就会给一点恰到好处的助力,让车稍微减速。
要是你猛踩刹车,它就会使出全身解数,把最大的助力给你,让车尽快停下来。
手指气缸

手指气缸
气动手指气缸(图10一26)能实现各种抓取功能,是现代气动机械手的关键部件。
在抓取技术中,完善的功能和最佳的适应性是至关重要的。
手指气缸具有以下特点:
1)所有的结构都是双作用的,能实现双向抓取,可自动对中,重复精度高。
2)抓取力矩恒定。
3)在气缸两侧可安置无接触式行程开关检测。
4)耗气量低,适合于含油雾的或不含油雾的压缩空气。
5)有多种安装连接方式,安装方便。
手指气缸主要有平行手指气缸、摆动手指气缸、旋转手指气缸和三点手指气缸等四种构形式。
东莞巨丰气动制造有限公司。
手指气缸运用实例
手指气缸运用实例
手指气缸是一种用于控制物体移动的机械装置,主要用于工业生产和机械化生产过程中的自动化控制。
以下是手指气缸的运用实例: 1. 自动化生产线控制:手指气缸被广泛用于自动化生产线上,用于控制工件的移动和定位。
在汽车生产线上,手指气缸可以控制汽车零部件的位置和移动,从而实现零部件的自动化装配。
2. 机械手控制:手指气缸可以被用于控制机械手的动作,使机械手能够在狭小的空间内完成复杂的动作。
在半导体生产过程中,手指气缸被广泛应用于半导体芯片的制造和测试。
3. 模具装配:手指气缸可以用于模具的装配,使模具能够在精确的位置上完成装配工作。
在模具加工过程中,手指气缸也可以被用于控制模具的定位和移动。
4. 包装机械控制:手指气缸可以被用于包装机械的控制,使包装过程能够自动化和高效化。
在食品、医药和化妆品等行业中,手指气缸被广泛应用于包装过程中的自动控制。
综上所述,手指气缸在工业生产中具有广泛的应用,其高效、精准的控制能力能够大大提高生产效率和品质,为工业生产的自动化和现代化进程做出了贡献。
- 1 -。