助力机械手臂
国内外助力机械手行业发展概况报告

国内外助力机械手行业发展概况报告
一、国内助力机械手行业发展概况
随着技术的进步,助力机械手的发展逐渐成为国内很多企业的热点。
在西部倡导的一些项目中,助力机械手是首当其冲的领域应用。
在汽车行业,助力机械手也被广泛采用。
目前,国内已经有几家公司投资发展助力机械手,取得了一定成绩。
目前,国内的助力机械手的发展主要有三方面:
1、国内助力机械手行业受到政府部门的高度重视,政府推动了国内助力机械手行业的发展。
比如,中国政府已经发布了《中国机器人行业十二五规划》,提出了2024年国内机器人行业的发展目标。
2、国内助力机械手行业的技术正在不断发展,各种类型的助力机械手也在不断改进。
国内企业也积极投资研发新型助力机械手,以满足不同客户的要求。
3、国内的助力机械手行业已经形成了一定的产业链,包括机械、控制、驱动等。
国内企业可以进行合作开发,提高助力机械手的效率。
综上所述,随着技术的进步和政府部门的支持,国内助力机械手行业取得了一定的发展,但仍面临诸多挑战。
二、国外助力机械手行业发展概况
在国际市场上,助力机械手行业发展速度非常快。
助力机械手工作原理
助力机械手工作原理哎呀,说起助力机械手,这玩意儿可真是个神奇的东西。
你知道吗,我最近就在一个工厂里亲眼见识了它是怎么工作的。
那地方,机器轰鸣,人来人往,可热闹了。
那天,我跟着一个老师傅,他带着我穿过了一排排的机器,来到了一台看起来挺普通的机械手旁边。
这机械手,说真的,长得就像那种科幻电影里的机器人手臂,但是没那么夸张,就是那种工业用的,结实又实用。
老师傅一边给我讲解,一边操作。
他说,这助力机械手,其实原理挺简单的,就是通过电机和一些传感器来控制手臂的动作。
你看,这手臂上有几个关节,每个关节都能转动,就像人的手臂一样。
但是,它比人的手臂可厉害多了,因为它可以举起比人手臂重得多的东西。
老师傅接着说,这机械手的电机就像是它的“肌肉”,给它提供力量。
而传感器呢,就像是它的“眼睛”和“耳朵”,告诉它现在的位置和状态。
这样,机械手就能准确地抓取、移动或者放下东西。
他给我演示了一下,只见他按下一个按钮,那机械手臂就慢慢地伸展开来,稳稳地抓住了一个大箱子。
然后,手臂又慢慢地抬起来,把箱子放到了传送带上。
整个过程,机械手臂的动作都非常平稳,一点也没有摇晃。
我看着那机械手臂,心想,这玩意儿可真聪明,它怎么知道什么时候该停,什么时候该动呢?老师傅好像看出了我的疑惑,笑着说:“这机械手臂,它有一套算法,就像人的大脑一样,告诉它什么时候该做什么动作。
”我看着那机械手臂,它的动作虽然简单,但是每一个动作都那么精确,那么有力。
我想,这大概就是科技的力量吧,它让机器也能像人一样工作,甚至比人做得更好。
最后,老师傅跟我说,这机械手臂虽然看起来很强大,但其实它也需要维护和保养。
就像人一样,机器也需要休息和照顾。
他每天都会检查一下机械手臂,确保它工作正常。
离开工厂的时候,我回头看了看那台机械手臂,它还在不停地工作着。
我想,这大概就是现代工业的魅力吧,它让机器变得像人一样,但又比人更强大。
这助力机械手,虽然看起来冷冰冰的,但它却在默默地为我们的生活提供着帮助。
有关助力机械臂的参考文献
助力机械臂是一种具备力传感和力反馈功能的机械臂。
它通过感知外界环境的力信息,并根据力指令,实现对机械臂的辅助力控制和力反馈。
助力机械臂在工业制造、康复医疗、协作机器人等领域具有广泛的应用前景。
本文将介绍助力机械臂的相关参考文献,并对其研究内容和应用进行概述。
1.Dai J. et al., “Design and control of a lower limb exoskeleton for robot-assisted gait training,” IEEE Transactions on Mechatronics, vol. 23, no. 3,pp. 1259-1270, June 2018. 该文研究了一种用于机器人辅助步态训练的下肢外骨骼的设计和控制。
该外骨骼结合了助力机械臂的设计理念,可以对患者的下肢进行辅助力控制和力反馈,提高步态训练的效果。
2.Battaglia E. et al., “Design and control of a robotic exoskeleton forupper limb rehabilitation,” R obotics and Autonomous Systems, vol. 94, pp. 13-24, May 2017. 该文介绍了一种用于上肢康复的机器人外骨骼的设计和控制。
该外骨骼采用助力机械臂技术,通过力传感器感知患者的手臂力信息,并通过控制算法实现对手臂的辅助力控制,促进上肢康复训练。
3.Zhao G. et al., “Design and control of an upper limb exoskeleton forrehabilitation,” IEEE Transactions on Neural Systems and RehabilitationEngineering, vol. 27, no. 5, pp. 866-875, May 2019. 该文研究了一种用于上肢康复训练的上肢外骨骼的设计和控制。
移动助力机械手臂安全操作及保养规程

移动助力机械手臂安全操作及保养规程在工业或生产领域,机械手臂被广泛使用,它能够减轻工人的劳动强度,提高生产效率,但是机械手臂如果操作不当或保养不到位,也会带来安全隐患和损坏设备的风险。
本文将介绍移动助力机械手臂的安全操作和保养规程,帮助您保障工作安全和设备寿命。
一、操作安全1. 注意安装位置机械手臂的安装位置必须符合设备使用及安全规范,特别要注意机械手臂周边区域的安全距离,防止因操作失误或设备故障引起人员伤害和物品损坏。
2. 熟悉操作规程在进行机械手臂的操作前,必须详细阅读规程和说明书,根据实际情况制定操作和应急预案,特别是在危险的作业区要倍加注意。
3. 选择适当的操作程序根据所需的工作任务选择适当的操作程序,避免出现滞后、过度伸展或意外碰撞等问题,为了获得更好的效果最好做好预先试验。
4. 检查设备在开启机械手臂前,必须检查设备是否完好,比如:夹爪锁定是否牢固,是否有集松,机械手臂工作轴是否处于正常状态等等,确保所有零部件和电子系统均完好无损,否则一旦开机,可能会给设备和人员带来不可预料的损失。
5. 注意手动操作注意手动操作功能或手动模式操作的使用,虽然大多数机械手臂都有自主操作模式,但如果无法正常操作,就需要人工干预。
在手动操作模式下,必须时刻注意所需操作的工作区域,确保操作安全。
6. 遵守操作规程在使用机械手臂时,必须遵循严格的操作规程和安全规定,以确保人身和设备的安全,遵守工厂安全标准,禁止操作人员超范围、超强度、违反规则或操作不慎。
7. 关闭电源在未使用机械臂或工作已完成时,必须关闭电源并断开电源,从而避免危险事件的发生。
二、保养规程1. 按时保养机械手臂需要定期维护,以确保其性能和可靠性。
根据机械手臂的工作强度和环境状况进行定期检查和保养,并更换必要的配件,以保证机械臂的高效、正常运行。
2. 润滑保养场地、环境及工作强度不同,期间需要对机械手臂进行适当的润滑保养。
润滑油必须按照制造商的要求进行更换和补充。
注塑机机械手臂方案
注塑机机械手臂方案引言在注塑机生产过程中,机械手臂是一种常用的辅助设备,用于自动化地完成产品的取出、分拣、堆叠等工作。
机械手臂的选择对注塑机的生产效率和产品质量有着重要的影响。
本文将介绍一种注塑机机械手臂方案,包括设计原理、系统架构和关键技术。
设计原理注塑机机械手臂的设计原理是基于物理学中的力学原理和运动学原理。
通过电机、齿轮、连杆等机械结构实现机械手臂的运动,通过传感器实时感知工作环境,通过控制算法实现机械手臂的精确控制。
系统架构注塑机机械手臂的系统架构主要包括四个部分:机械结构、传感器、控制算法和通信模块。
机械结构机械结构是机械手臂的骨架,包括电机、齿轮、连杆等部件。
机械结构的设计应考虑机械手臂的运动范围、承重能力和稳定性等因素。
常见的机械结构设计有直线型、平行型和关节型等,可根据具体应用场景选择合适的结构设计。
传感器传感器用于感知工作环境和机械手臂的状态。
常见的传感器包括位置传感器、力传感器、视觉传感器等。
位置传感器用于测量机械手臂的位置和姿态,力传感器用于测量机械手臂施加的力和承受的负载,视觉传感器用于识别和定位产品。
控制算法控制算法用于实现机械手臂的运动控制。
常见的控制算法有PID控制算法、路径规划算法和碰撞检测算法等。
PID控制算法通过调节控制参数,使机械手臂达到给定的位置和姿态。
路径规划算法通过规划合理的轨迹,使机械手臂快速且安全地完成任务。
碰撞检测算法通过实时监测工作环境,避免机械手臂与其他物体发生碰撞。
通信模块通信模块用于机械手臂与注塑机控制系统之间的数据交互。
通过通信模块,可以实现机械手臂的远程控制和监控。
常见的通信方式有有线通信和无线通信,可根据实际需求选择合适的通信方式。
关键技术注塑机机械手臂方案中的关键技术主要包括运动控制技术、视觉识别技术和力控制技术。
运动控制技术运动控制技术是实现机械手臂精确控制的关键。
通过合理设计控制算法和调节控制参数,可以实现机械手臂在给定时间内达到目标位置和姿态,并具有较高的运动精度和稳定性。
助力机械手的设计
助力机械手的设计其工作原理是酒瓶移植机构将酒瓶刮到酒瓶托盘上,然后处理。
下面详细介绍:固定机构:帮助机械手将瓶子移动机构,并通过左右滑块固定在固定机构上;同时,帮助机械手将瓶子移动机构连接到同步带的上部。
下部(我们计算距离),随着同步轮的旋转,两个机构只做对称的直线运动,实现同步运动:瓶子刮在托盘上。
值得注意的是,减速器有两个输出轴。
稍微提一下,这是一种螺旋伞齿轮减速器,一种标准产品(一般来说,行星减速器制造商销售)。
其内部机构如下:(该结构也限制了其使用。
该机构不适用于高速运动。
如果螺旋伞齿超过3000r/min,噪音将超过70dB)。
瓶子移动机构:瓶子的抓取动作由限位板-1和限位板-4完成,其中限位板-1固定,限位板-4由气缸推动。
我们可以看到,助力机械手可以驱动右滑动机构。
此时,固定在中间的同步轮也一起移动,驱动左连杆在左滑动机构上移动,限位板-3也会一起移动。
因此,在左右推动缸的驱动下,限位板-3和限位板-2也开始对称直线运动。
PCB板翻转机构:终端执行机构固定在垂直导轨上,驱动通过连杆驱动。
将动力传递给终端执行机构,以驱动它间歇上下移动。
助力机械手一般属于空间开链式。
由于环境的复杂性、不确定性和果实分布的随机性,助力机械手的选型既要遵循工业机械手的基本原则,又要考虑其工作特点。
助力机械手是较早出现的工业机器人,也是较早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门(机械手)。
下面为大家讲解助力机械手选型四大要点:1.取出时间:产品的取出时间是指机械手臂在模内取产品的循环时间。
此时间因产品的取出方式不同而异。
在选型时主要考虑产品是否对取出时间有特殊要求,如果要求取出时间非常短,可能就需要用到手臂伺服的机械手。
2.横行行程:机械手的横行行程指的是横走机械手横行方向的较大行程。
在选型时主要考虑机台之间的间距是否够大,或者有无特殊要求,特别是两台机械手相邻一正一反安装时两台注塑机之间有没有足够的空间。
气动助力机械手工作原理

气动助力机械手工作原理
气动助力机械手是一种使用空气压缩机或气压驱动气动元件来实现动作的机械手。
其工作原理主要包括以下几个方面:
1. 压缩空气供给:通过空气压缩机将大气中的空气压缩到一定压力后,通过管路输送至气动助力机械手中。
2. 气动元件控制动作:气动助力机械手中使用了气动元件,如气缸、气动马达等,通过调节气源供给和排气,通过控制气缸的进出气,实现机械手的动作。
3. 机械结构传动:机械手的机械结构通过传动装置与气动元件连接,将气动元件的运动转化为机械手的运动,实现机械手的抓取、举升、转动等动作。
4. 控制系统控制:气动助力机械手需要通过控制系统来控制机械手的运动,可以通过手动操作、自动控制或PLC控制等方式实现。
总结来说,气动助力机械手的工作原理就是通过压缩空气供给和气动元件控制动作,实现机械手的运动,完成抓取、举升、转动等工作。
人体外骨骼设计与实现-手部助力结构
人体外骨骼设计与实现-手部助力结构摘要即使是在现代的科技背景之下,受限于资金少或场地小的原因,一些行业一些场合因依旧对人力有着旺盛的需求。
工人长时间高负荷的体力工作后,因疲劳的积累造成工作效率下降,工作事故的概率也会提高。
本课题将要设计研究无动力手部助力结构,帮助体力劳动的工人减轻手部负荷,从而保护身体提高效率。
它主要是由多个静平衡机构组合而成,并且还能调节助力的档位,使该手部助力结构有跟多更广的应用条件。
本次设计依靠探究静平衡成立条件,进而确定设计方案,对手部助力结构进行了针对性的设计和说明。
最后对部分零件进行验算校核,从而确保本次设计手部助力力结构的能满足实际的使用要求。
人体外骨骼设计与实现-手部助力结构关键词:助力结构,无动力外骨骼,静平衡原理,弹簧Design and implementation of human exoskeleton-hand-assistedstructureABSTRACTEven under the background of modern science and technology, due to limited capital or small space, some industries still have a strong demand for manpower in some occasions. After a long period of manual work with high load, the work efficiency is reduced due to the accumulation of fatigue, and the probability of work accidents will also increase.This topic is to design and study the unpowered hand-assisted structure to help manual workers reduce the load on the hands, thereby protecting the body and improving efficiency. The unpowered assisted exoskeleton not only has a reduction in volume and quality, but also has no energy consumption. It solves the long-term lack of endurance of the active power assisted exoskeleton, which is consistent with the green, low-carbon and energy sustainable Development concept.It is mainly composed of a plurality of static balance mechanisms, and can also adjust the power assist position, so that the hand assist structure has more and more application conditions. This design relies on exploring the conditions for the establishment of static balance, and then to determine the design plan, and carried out targeted design and description of the hand-assisted structure. Finally, some parts are checked and verified to ensure that the design of the hand-assisted structure of the hand can meet the actual use requirements.Key words:Boost structure, Unpowered exoskeleton, Static balance principle, spring目录摘要 (1)人体外骨骼设计与实现-手部助力结构............................................................................. 错误!未定义书签。
注塑机机械手臂原理
注塑机机械手臂原理
注塑机机械手臂是一种用于注塑机械设备中的自动化装置,它主要用于将注塑机所产生的塑料制品从注塑机模具中取出并进行后续处理。
机械手臂的原理是基于先进的机电一体化技术和控制系统,以实现准确的操作和高效的生产。
机械手臂通常由以下几个部件组成:伺服电机、减速器、联轴器、传感器、控制器以及机械结构。
其中,伺服电机通过电子控制系统来控制手臂的运动,减速器用于减少电机转动速度并提高扭矩输出,联轴器用于连接电机和减速器,传感器用于监测手臂的位置和力度,控制器则负责对手臂进行精确的控制和编程。
在注塑过程中,机械手臂首先接收到注塑机发出的信号,确定取出塑料制品的时间和位置。
然后,伺服电机开始运转,将机械手臂的各个关节按照设定的路径和速度进行运动。
同时,传感器不断监测手臂的位置和力度,并将相关信息传递给控制器进行实时调整。
当机械手臂到达指定位置时,它会使用特殊的夹具将注塑机中的塑料制品夹持住,然后将其取出并放置到指定的位置。
完成取出之后,机械手臂会根据设定的路径返回初始位置,等待下一次操作。
整个过程中,机械手臂的运动是精确、稳定且高效的,大大提高了注塑机械设备的生产效率。
总的来说,注塑机机械手臂通过先进的机电一体化技术和控制系统,实现对塑料制品的自动化取出和处理。
它具有高度可靠
性、高速度和高精度的特点,为注塑行业的发展提供了强有力的支持。
气动助力机械手的平衡原理分析与故障排除

气动助力机械手的平衡原理分析与故障排除摘要:气动助力机械手又称平衡器、平衡环、气动助力器等,由于其具有省事,省力的特点,被广泛应用于现代工业中的各个领域,如:大型物料的移载,搬运,大型设备的精确定位、装配等场合,总之,在现代生产中,无论原料的接受还是半成品的加工、生产、配送等环节,气动机械手都发挥着不可替代的作用。
基于此,本文主要对气动助力机械手的平衡原理与故障排除进行分析探讨。
关键词:气动助力机械手;平衡原理;故障排除1、气动助力机械手的组成气动助力机械手的重要组成是:平衡装置、气动系统、安全系统和操作系统。
操作系统由夹具,操作手柄和操作气路组成,它将硅棒夹紧,是机械手的手臂。
它的复杂程度决定了机械手的复杂程度;它的人性化程度决定了机械手的成败。
安全系统由多个回转关节的刹车,限位,安全气路及外保护组成,它使机械手安全可靠。
平衡装置是机械手的主体,是实现力平衡的主要机构。
它由气动系统由平衡气路,负载负荷转换逻辑气路,操作气路和安全气路组成。
是实现力平衡的主要动力源。
平衡气路用于平衡夹具和硅料的重量,负载负荷转换逻辑气路使机械手在有载,无载状态下均可实现平衡。
操作者始终处于轻松的工作状态,它是机械手的灵魂。
2、气动助力机械手平衡功能的工作原理通过阅读气动原理图(图1),助力机械手的“初定位”、“翻转”、“刹车”动作较易理解,文章不再叙述,重点分析“加载”、“夹紧”,以及“放松”后“空载”状态实现的工作原理。
图1 气动原理图2.1重力平衡气缸的空载压力与加载压力“重力平衡气缸”的压力由一个外控式减压阀9控制,进入重力平衡气缸的压力将由该外控式减压阀的压力实现控制。
外控式减压阀的控制气路连接到梭阀13,梭阀的两端分别直通到减压阀11以及间接通过阀3连通到减压阀12。
图中减压阀11常通,可知减压阀11调定的是“空载”压力,减压阀12调定的是“加载”压力。
“空载”压力与“加载”压力切换时,起作用的是阀3的通断,当阀3的非弹簧位起作用时,通过减压阀12与通过减压阀11的气体同时进入梭阀13的两端,因为调定“加载”压力的减压阀12压力一定高于调定“空载”的减压阀11的压力,根据梭阀工作时取输入高压作为输出的原理,通过减压阀12的“加载”压力进入外控式减压阀9的控制口,“重力平衡气缸”得到的是“加载”压力状态。
助力机械手
什么是助力机械手
一、什么是助力机械手
助力机械手是主要由平衡吊主机、抓取夹具(或机械手)及安装结构这三部分组成的能够让操作者无重力、精确直观、便捷、安全、高效的将重物运动到指定的目的地的设备。
二、助力机械手的工作原理
通过检测吸盘或机械手末端夹具和平衡气缸内气体压力,能自动识别机械手臂上有无载荷,并经气动逻辑控制回路自动调整平衡气缸内的气压,达到自动平衡的目的。
工作时,重物犹如悬浮在空中,可避免产品对接时的碰撞。
三、助力机械手的工作模式
在机械手臂的工作范围内,操作人员直接用手可将其前后左右上下轻松移动到任何位置,人员本身可轻松操作。
四、助力机械手的安全性
气动回路还有防止误操作掉物和失压保护等连锁保护功能。
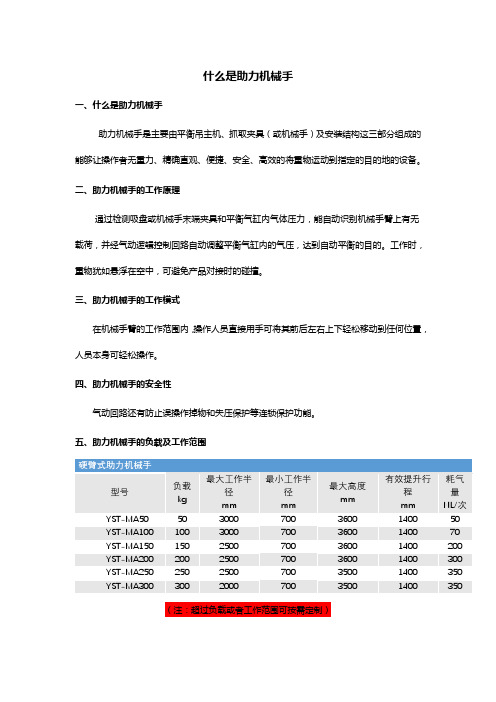
五、助力机械手的负载及工作范围
(注:超过负载或者工作范围可按需定制)
六、助力机械手的分类
助力机械手分为:硬臂式助力机械手、软索式助力机械手、折臂吊、电动平衡吊、气动平衡吊、悬臂吊、墙壁吊。
七、助力机械手的应用
汽车行业、陶瓷卫浴行业、五金、建材家具行业、玻璃行业、电子电器、纸箱搬运化工行业等。
机械臂结构
五轴关节型机器人手臂运动图例():
偏转 肘转
俯仰
肩转
腰转
腰转姿态
五轴关节型机器人手臂运动图例():
肩关节、肘关节与手腕的协调
.关节型机械臂的结构()
各运动的实现: 腕部的旋转: 电机→减速器→链轮副→锥齿轮副→旋转运动 腕部俯仰: 电机→减速器→链轮副→俯仰运动 肘关节摆动: 电机→两级同步带传动、′→减速器→肘关节摆
.刚度高:
为了防止臂部在运动过程中产生过大 的变形,手臂的截面形状要合理选择。
工字型截面的弯曲刚度一般比圆截 面大,空心管的弯曲刚度和扭转刚度 都比实心轴大得多。
工字钢():
、工字钢的型号与高度尺寸 有关,如:号工字钢即指其 高度尺寸为。
、其它参数如截面积、单位 长度的理论质量、截面静力 矩等可查相应的设计手册。
世博期间,一旦面临降雨,世博轴也能“轻松应 对”。机施公司透露,世博轴底部还设置了雨水沟渠, 用来收集雨水。除了满足特大暴雨时的蓄洪要求,雨 水在经过处理后,还能用于浇灌和世博轴内“小气候” 的调节。
一、臂部设计的基本要求
.承载能力足:
手臂是支承手腕的部件,设计时不仅 要考虑抓取物体的重量或携带工具的 重量,还要考虑运动时的动载荷及转 动惯性。
.圆柱坐标型:
臂部由一个转 动副和两个移 动副组成。相 对来说,所占 空间较小,工 作范围较大, 应用较广泛。
.关节型:
由动力型旋转关节 和前、下两臂组成。 关节型机器人以臂 部各相邻部件的相 对角位移为运动坐 标。动作灵活,所 占空间小,工作范 围大,能在狭窄空 间内饶过各种障碍 物。
此前,世博轴顶部的索膜结构也已完工。建设者 总共安装了块巨大的白色膜布,面积达平方米。如此 巨大的膜布厚度仅为毫米,但其设计张拉力每米达吨, 是当今世界强度最高的膜材。
有关助力机械臂的参考文献
有关助力机械臂的参考文献助力机械臂是一种能够为人类提供力量支持和辅助操作的机械装置。
它可以帮助人们完成重复、繁重或危险的任务,提高工作效率和安全性。
以下是一些关于助力机械臂的参考文献,以供进一步了解和研究。
1. 纳米液压助力机械臂控制系统设计与实现(孙宏磊等,《机械制造与自动化》)这篇论文介绍了一种利用纳米液压技术实现的助力机械臂控制系统。
该系统通过对液压驱动控制和传感器反馈的精确控制,实现了对机械臂的力量支持和操作辅助,为机械臂提供了更高的精度和灵活性。
2. 基于人机协同的助力机械臂研究(李明等,《控制与决策》)该研究提出了一种基于人机协同的助力机械臂系统,通过感知人体动作和意图,实时调节机械臂的力量输出和运动轨迹,与人类操作者实现高效的合作。
研究结果表明,该系统能够显著提高人类操作者的工作效率和舒适性。
3. 助力机械臂在工业装配中的应用研究(王忠等,《机器人技术与应用》)该研究探讨了助力机械臂在工业装配领域的应用。
通过设计合理的力传感器和控制算法,使机械臂能够准确地感知装配零件的力度和位置,实现精确的装配操作。
实验结果表明,助力机械臂能够提高装配效率和质量,降低人力成本。
4. 助力机械臂在医疗康复中的应用研究(陈勇等,《现代医疗设备与信息技术》)这篇研究论文介绍了助力机械臂在医疗康复领域的应用。
通过结合机械臂的力量输出和传感器的反馈控制,助力机械臂能够帮助康复患者进行肌肉力量的恢复和关节活动的训练,提高患者的康复效果和生活质量。
以上参考文献展示了助力机械臂在不同领域的应用和研究成果。
未来,随着科技的不断进步和创新,助力机械臂有望在更多领域发挥重要作用,并为人类的工作和生活带来更多便利和改善。
助力机械抓手设计方案

助力机械抓手设计方案机械抓手是一种可以模拟人手动作的装置,用于抓取、搬运和放置物体。
在工业生产和机器人应用中广泛使用。
以下是助力机械抓手的设计方案。
设计目标:1. 抓取能力:能够稳定地抓取各种形状、大小的物体。
2. 灵活性:可以适应不同抓取任务,如抓取平面物体、圆柱体、球体等。
3. 自适应性:能够自动调节抓取力度和姿态,适应不同物体的特性。
4. 安全性:避免对抓取物体造成破坏或损坏。
设计方案:1. 结构设计:- 抓爪设计:抓爪采用柔性材料,如橡胶或弹性塑料,以增加与被抓取物体之间的摩擦力,提高抓取稳定性。
- 关节设计:采用多关节结构,可实现多个方向的运动,增加抓取的灵活性和自由度。
- 手指设计:手指长度和形状可根据物体形状进行调整,以达到更好的抓取效果。
- 驱动系统:采用电动驱动系统,可以实现精准控制抓爪的运动和力度。
2. 动力系统设计:- 采用气动助力系统:在抓手内部安装气缸和压缩空气供给装置,通过控制气压的大小来调节抓取力度。
气动助力系统具有灵活可靠的特点,并且节省能源。
- 配备传感器:在抓爪顶部和手指末端安装接触力传感器,可以实时监测抓取力度以及物体的形状,以便根据需要调节抓手的姿态和力度。
3. 控制系统设计:- 使用编程控制:通过编程控制抓手的动作,根据输入信号控制气动助力系统的运行和控制抓爪的运动。
可以根据不同的抓取任务进行编程调整。
- 可编程逻辑控制器(PLC):通过PLC控制抓手的动作,可以实现多种抓取模式和自适应控制。
总结:通过以上设计方案,助力机械抓手可以实现精确、灵活、安全的抓取功能,并且适用于不同的工业应用和机器人任务。
这种抓手设计方案可以提高生产效率,减少人力资源成本,并且具有较高的可靠性和操作稳定性。
有关助力机械臂的参考文献
有关助力机械臂的参考文献近年来,机器人技术的快速发展在工业、医疗、军事等领域发挥了重要作用,而助力机械臂作为机器人中的重要一员,也受到了广泛关注。
助力机械臂通过增加对力矩的辅助,能够较轻松地完成各种工业生产、医疗康复等任务。
下面将介绍几篇与助力机械臂相关的参考文献。
1. "Development and Evaluation of a Passive Exoskeleton Robotfor Hand Grasp Assist" (Rahman et al., 2013)这篇研究主要介绍了一种被动助力外骨骼机器人,用于握力协助。
通过对握持动作的力矩辅助,该系统能够减轻用户手部肌肉的负担,提供更稳定和精确的握持能力。
文章详细介绍了系统的设计、制造过程以及评估结果,并提出了未来改进的方向。
2. "Design and Control of a Wearable Cable-Driven Arm Exoskeleton (CAEXO)" (Hirche et al., 2017)该文献针对肩关节损伤的康复辅助提出了一种可穿戴式的循环驱动机械臂助力外骨骼机器人。
文章介绍了该系统的设计原理、结构、关节辨识和控制方法,并通过实验验证了系统的性能和有效性。
该研究提供了一种创新的助力机械臂设计思路,为肩关节损伤康复提供了新的解决方案。
3. "A Soft Exoskeleton for Hand Assistive and Rehabilitation Application using Pneumatic Actuators" (Hani et al., 2016)本文献介绍了一种使用气动执行器的柔性助力手部外骨骼机器人。
这种系统通过气动扩张器产生力矩,以辅助手部活动,具有较低的成本和较高的柔韧性。
文章详细介绍了设计原理、结构和控制策略,并通过实验结果验证了该系统的性能和可行性。
助力机械手原理

助力机械手原理一、引言助力机械手是一种用于辅助人类完成重复性工作的机器人。
它可以通过预先编程的方式执行各种任务,如装配、包装、搬运等。
本文将介绍助力机械手的原理,包括其结构、控制系统和工作原理。
二、结构助力机械手通常由以下几个部分组成:1. 机械臂:机械臂是助力机械手的主体部分,由多个关节和连接件组成。
它可以沿着三维空间内的任意路径移动,并能够进行旋转和伸缩。
2. 夹具:夹具是用于抓取和释放物体的部分。
它通常由夹爪、吸盘或磁铁等组成。
3. 传感器:传感器用于检测周围环境和物体属性,并将这些信息反馈给控制系统。
常见的传感器有视觉传感器、压力传感器和力传感器等。
4. 控制系统:控制系统是助力机械手的大脑,负责接收传感器反馈的信息,并根据预设程序控制机械臂和夹具完成任务。
三、控制系统助力机械手的控制系统通常由以下几个部分组成:1. 控制器:控制器是助力机械手的主要控制设备,负责接收传感器反馈的信息,并根据预设程序控制机械臂和夹具完成任务。
常见的控制器有PLC、PC和单片机等。
2. 编程设备:编程设备用于编写和修改助力机械手的工作程序。
它通常包括编程软件和连接电缆等。
3. 传感器:传感器用于检测周围环境和物体属性,并将这些信息反馈给控制系统。
常见的传感器有视觉传感器、压力传感器和力传感器等。
4. 通信模块:通信模块用于与其他设备进行数据交换,如与生产线上其他机器人进行协调配合等。
四、工作原理助力机械手的工作原理可以分为以下几个步骤:1. 检测环境:助力机械手首先使用传感器检测周围环境和物体属性,获取相关信息。
2. 制定计划:根据检测到的环境信息,助力机械手会根据预设程序制定工作计划,包括机械臂的移动路径和夹具的动作方式等。
3. 执行任务:助力机械手根据制定的计划,控制机械臂和夹具完成任务。
例如,抓取、移动、旋转或放置物体等。
4. 反馈信息:助力机械手在执行任务过程中会不断地收集反馈信息,并将其传输给控制系统。
无人机机械手臂原理
无人机机械手臂原理
无人机机械手臂是一种机械装置,集成了无人机和机械手臂的功能。
其原理是通过先进的传感器和控制系统,将无人机与机械手臂结合起来,以实现精确的操控和操作任务。
机械手臂部分采用关节连接的多个自由度结构,可以模拟人手的运动方式,实现灵活的操作。
机械手臂上装有各种工具或传感器,可以用于抓取、拖拉、测量、进行精确定位等各种操作。
无人机部分则提供了机械手臂的移动平台,通过电动机和螺旋桨来提供推力,以实现无人机的悬停、垂直起降、水平飞行等功能。
无人机上的传感器和导航系统可以提供位置、姿态和环境等信息,用于辅助机械手臂的操作。
在操作时,无人机机械手臂可以通过无线通信和控制系统接收指令,进行自主或远程控制的工作。
通过精确的定位和姿态控制,可以使机械手臂准确地到达目标位置,并进行所需的操纵任务。
总体来说,无人机机械手臂的原理是将无人机和机械手臂的功能相结合,通过先进的控制系统实现精确的操作和任务执行。
这样的系统在很多领域都有广泛的应用,如建筑、农业、救援等。
零重力助力臂原理
零重力助力臂原理
零重力助力臂的原理主要基于力的平衡和伺服控制系统。
在助力机械手“零重力”操作系统中,采用直流电机闭环速度伺服系统,升降指令来自于装载操作把手上的力传感器。
当操作者搬动操作把手产生上下运动趋势时,力传感器输出信号通过A/D转换接口送给单片机系统,作为输入指令,单片机根据力信号的大小控制电机输出相应的转速,控制物料随操作者的运动趋势而运动。
当操作者停止搬动操作把手时,力传感器的输出信号为零,电机停止运动。
出于传感器的灵敏度较高,只需要很小的操作力即可产生所需要的力信号,操作者感受不到被提升物料的重力,可以很轻便地实现物料的升降控制,因此称为零重力操作。
在助力机械手“零重力”操作系统中没有使用具有反向自锁功能的减速器,而是使用行星轮减速器。
这样可以大大提高驱动工作效率。
在减速器之后,同轴串联一个逆止器,防止断电后升降机构因为负载重力的作用而逆行运动。
以上内容仅供参考,建议查阅专业书籍或者咨询专业人士以获取更准确的信息。
助力臂原理

助力臂原理
助力臂原理是可以用来描述强制性运动和力学设计的原理。
在日常生活中,我们可以利用助力臂原理来简化操作,例如使用手杖行走、开启瓶盖,以及使用锁钳等工具。
助力臂原理的实质是在一定范围内通过杠杆作用来实现力的扩大与方向的改变,这种作用可以使我们在力量上进行优化和最大化,从而达到预期的目标。
助力臂原理还可以应用于力学设计和工程学中。
在机械设计中,助力臂可用于扩大力矩,使系统更有效地执行特定的任务。
在汽车工业中,助力臂也被广泛应用于转向和制动系统。
助力臂原理的实际作用可通过以下示例更好地理解:
示例1. 使用手杖行走
在使用手杖行走时,我们将手杖伸出到身体一侧,轻轻向前推进。
手杖的长度和位置可以改变其杠杆作用力的位置,使我们在推杆时感觉更轻松,更有力量。
示例2. 开启瓶盖
当我们开启瓶盖时,我们可以使用机械开瓶器等工具来利用助力臂原理。
通过机械开瓶器上的杠杆系统,我们可以在少量作用力下扩大手动的力矩,从而使我们能够更容易地打开瓶盖。
示例3. 使用锁钳
在使用锁钳时,我们可以利用其助力臂原理来扩大力矩,以执行各种任务。
通过适当地调节锁钳的手柄位置和长度,我们可以在较小的力量下扩大钳口的开合量,在旋转方向上实现力的增强。
总之,助力臂原理是一个非常有用的物理原理,能够帮助我们在日常生活中更有效地执行任务。
在进行机械设计和工程学研究时,了解和应用助力臂原理也非常重要。
它可以帮助我们设计更有效的系统和机器,以达到更好的性能和效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在工厂的生产车间里面,有很多的大型物件总量非常重,在搬运时就不得不借助机器的力量,一般像这种的,我们都会选择使用助力机械臂。
由于具有无重力化、精确直观、操作便捷、安全高效等特点,“平衡吊”广泛应用于现代工业中的物料移载、高频率搬运、精确定位、部件装配等场合。
从接受原材料和物料开始,一直到加工、生产、保管及配送等物料流动过程中的每一个环节,平衡吊手动移载系统所发挥的作用是令人瞩目的。
正确使用相应的物料移载方法和手段,对于各行业中,重物的移载、搬运现场的操作人员的健康、安全,进而其作业的合理性、劳动力的节省、生产效率的提高、产品品质的保障等多方面都有极大改善。
那助力机械臂有哪些种类呢?工厂有应该怎么去选择呢?我们可以按照不同的驱动方式可分可分为液压式、气动式和电动式。
1.液压式。
这种机械臂通常是由液动机、伺服阀、油泵、油箱等部分组成驱动系统,由驱动机械臂的执行机构进行工作。
通常它具有很大的抓举能力,其特点是结构紧凑,动作平稳,耐冲击,耐振动,防爆性好,但对液压元件有较高的制造精度和密封性能要求,否则漏油将污染环境。
2.气动式。
其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气
源方便,动作迅速、结构简单、造价较低、维修方便。
但难以进行速度控制,气压不可太高,故抓举能力较低。
3.电动式。
电力驱动是目前机械臂使用得最多的一种驱动方式。
其特点是电源方便,响应快,驱动力较大,信号检测、传递、处理方便,并可以采用多种灵活的控制方案。
驱动电机一般采用步进电机,直流伺服电机以及交流伺服电机。
一套完整的助力机械手装备主要由三部分组成:平衡吊主机、抓取夹具(或机械手)及安装结构。
机械手主机是实现物料(或工件)在空中无重力化浮动状态的主体装置。
机械手则是实现工件抓取,并完成用户相应搬运和装配要求的装置。
安装结构则是根据用户服务区域及现场状况要求以支撑整套设备的机构。
芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、CNC悬挂式全伺服机械手、CNC开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
芜湖大正百恒智能装备有限公司位于安徽省芜湖市,专业研发、制造、销售注塑机械手,车床、磨床、冲压上下料机械手及周边自动化设备。
产品广泛适用于基础工业,汽车零部件,电子通信,环保化粪池,检查井、垃圾桶、托盘、食品包装,PET瓶坯,家电设备,光学制造等。
公司汇聚行业界经验丰富的技术精英及诚信专业销售团队,为您量身打造适合的自动化解决方案,我们深信优秀的产品品质是企业生存的基础,发展的前提。
一直采用世界先进的电器零部件,配合CNC精密加工,激光机切割,钣金加工,严格要求品质检验,以达到产品最佳效能。
更多详情请点击大正百恒智能查询,我们欢迎您!。