激光机使用手册4.0
【HUARAY】产品操作手册(Poplar-355-3 A)V4.0
Poplar UV Lasers3A产品操作手册HUARAY PRECISION LASER CO., LTD.HG Laser Park, East Lake High Tech Development Zone,Wuhan, Hubei, 430223, P. R. China. PHONE: 400-8815-125 E-SHOP: EMAIL: ********************目录第一章:激光安全常识 (4)1.1激光的防护等级 (5)1.2激光设备的电气防护 (5)1.3运行时的安全要求 (5)1.4专业操作人员要求 (6)1.5使用人员常识 (6)第二章:产品基本介绍 (7)2.1POPLAR-355/3A激光器外观尺寸图 (7)2.224V电源外观尺寸图 (7)2.3POPLAR-355/3A产品技术参数 (8)第三章:产品安装说明 (9)3.1总连接示意图 (9)3.2激光器安装条件 (10)3.3制冷机安装说明 (11)3.3.1制冷机安装条件(配置Huaray制冷机) (11)3.3.2制冷机安装注意事项 (11)3.4激光器安装说明 (12)3.4.1激光器安装方式(参考示例图) (12)3.4.2激光器安装步骤 (13)3.5设备电气连接 (15)23.5.1腔体接口说明 (15)3.5.2水箱外控保护接口 (15)3.5.3外控接口定义 (16)第四章:电源箱操作说明 (19)4.1激光器开关机流程图 (19)4.2RS232串行通讯控制 (21)31.1激光的防护等级➢激光产品根据其输出功率等级分为1类,2类,3A类,3B类和4类(CLASS I,CLASS II,CLASS IIIA,CLASS IIIB,CLASS IV)。
➢其中4类激光辐射会对人体产生严重伤害。
本产品即属于此类。
1.2激光设备的电气防护➢非专业人员不允许打开电源或激光器进行任何操作,以防止触电事故发生。
激光打标机设备操作说明书

设备名称
激光打标机 设备功能
激光雕刻、打标 文件编号 设备型号
I ■
商
版 本
AO
—^振^噩勤器指示(未打^燎亮,打^燎滋) ------- ►Q Sl 勤器辍警指示 ---- ►水温辍警指示
1 .操作规范(硬件): 1.1 开机程序
1.1.1 接通外供电源3Ψ380Vo
1.1.2 用系统钥匙打开计算器主机门,打开主机电源和显示器电源进入HAN y SLASER 打标软件系统
并空打标一次。
1.1.3 激活主电源:将系统钥匙插入主控箱右上角处的钥匙插孔,顺时针旋动钥匙开关并按下激活
开关,可听到机器内部有电磁继电器触点吸合的声音及冷水机水泵旋转的声音并看到冷水 机显示屏显示当前温度。
此时主控柜上的各报警灯和指示灯只有SCanDriVerAlarm (振镜驱动 器指示)灯亮。
制作
K MWMI
L t L —J
a
A 系^^匙居国 Fl
一~►急停^居司 一"A 振^^81 ~~►主控箱
一~►重流数Ii 表
一"►激光重源停止后同 ~►1!流旋Ifl ~►激光重源做勤^居同 一~►自勤空氧购
~^Q 隔勤器
~~►水IS 辍警指示
L ►缺相甄警指示 ∣→氮燧黠燃指示
J
i
O .
-。
激光切割机操作手册

激光切割机操作手册
一、操作前准备
1. 打开激光切割机电源,检查设备是否正常启动。
2. 调整工作台的位置,确保工作台安全可靠。
3. 检查激光切割机的切割头是否正常,如有异常应及时调整或更换。
二、操作步骤
1. 将需要切割的材料放置在工作台上,并确保材料固定可靠。
2. 调整激光切割机的焦距,以适应不同厚度的材料。
3. 调整切割速度和功率,根据需要选择合适的参数。
4. 按下切割按钮,激光切割机开始工作,切割材料。
5. 切割完成后,关闭激光切割机,取出切割好的材料。
三、注意事项
1. 在操作过程中,应注意安全,避免激光直接照射到人眼或皮肤。
2. 确保工作区域内的空气流通,避免产生烟雾和异味。
3. 在使用过程中,应定期检查设备的各项性能指标,确保设备正常运行。
4. 在搬运和存储过程中,应注意保护激光切割机的表面,避免碰撞和划伤。
5. 对于长期不使用的激光切割机,应定期进行维护和保养,以确保其使用寿命和性能。
激光机操作说明
激光机操作操作使用说明●粤铭激光机操作规程机床上电a.确保台面无异物b.打开机床电源开关,机床复位。
c.确保水冷机组启动。
d.确保气泵启动(辅助气源)。
e.确保离心风机启动(排烟除尘装置)f.确保循环冷却水到达正常工作温度后(10~30度)。
g.选择加工文件。
执行程序a.放置材料,调节焦距,焦距为6mm,定义加工原点。
b.在绘图软件中,将图形排版。
c.确保文件中的图形在页面中心的位置。
且线条保证为最细的的线条d.选择打印工具,选择打印机为“Topwisdom virtual printer”打印机,点击打印;e.在雕刻对话框中修改加工参数,选择加工模式,设定加工速度和能量。
f.点击加工输出,激光机开始运行。
g.加工完毕。
机床断电a.将激光头移动到台面右上角。
b.关闭机床电源。
c.将电气柜上的电源开关关断(Off)。
d.关气泵(辅助气源)。
e.关闭计算机注意事项a.冷水机显示温度不能低于15度,不能高于30度,如果有异常温度需要检修b.切割过程中一定要保证吹气气压正常,在7kg以上c.切割过程要做到有人职守,防止材料燃烧d.不要直接注视切割点,防止灼伤e.切割过程中不能将身体伸入加工区域●在CorelDRAW中的使用注意事项:1.点工具栏上的打印按钮或者菜单->文件->打印。
2.选择Topwisdom virtual printer打印机。
3.请选择相应的打印(雕刻)范围,比如只打印(雕刻)选定内容,请勾选<打印范围>的<选定内容>。
如果需要改变打印设备页面大小(雕刻机机器幅面的大小),请点击<属性>按钮设置。
4.点击<打印>按钮就会弹出激光雕刻操作界面。
5.如果出现下图中这样的问题,请检查页面大小是否匹配,图形是否超出页面等问题。
打印机的页面大小(雕刻机机器幅面的大小)一般要与软件中设置的页面大小匹配,图形不要超出边界,可以先预览查看打印效果,然后做效应调整。
激光作业指导书
苏州荣科精密机械有限公司版号/改次: 1/0激光作业指导书文件编号: RK-QM-01页次: 第 1 页共1页1.0、目的:1.1、确保机器的正常运行和规范员工作业。
2.0、安全:2.1、每天早上检查激光机和电压是否异常,以免造成不必要损失和对人员的伤害。
3.0、工作指引:3.1、每天上班前10分钟两班应认真交接当天没有完成的任务以及有关需要注意的事项。
3.2、上班后操机人员首先对现场所有工单进行阅览,对图纸进行分类,找出当天要完成的工单从紧急、急、正常三种顺序进行生产,除特殊工单外。
个人不得私自挑单或不做。
3.3、找好工单后首先找一款产品进行生产,学徒可进行下一款产品的配刀工作,师傅可对所有工单的材料进行核对,找到材料的位置,看是否所有工单的材料都已到位,如有异常需找当班班长或组长进行确认。
3.4、在每款产品打出首件时应自检,把毛刺去干净合格后再请品管确认,如有尺寸或产品与图纸不符时找班长或组长确认,不得在产品未检时进行生产,如有报废应对当事人进行处罚。
3.5、在对要求较高的产品进行加工时的防护,如图纸标有A1或A级需镀彩锌、本色氧化,不做表面处理的产品时,在上下料时应对材料和机床上的异物进行清理,特别是在对铝板加工时应时不时对刀盘和机台进行清理,以免造成产品压伤划伤,造成不必要的损失3.6、做完每一刻产品应正确摆放,对不同工序的产品应分开摆放,在流转产品时就不需要对产品进行挪动,以免产品划伤。
3.7、在对产品流转时应做到产品到哪图纸就到哪,以免图纸丢失,也有利于下工序的生产,不需要到处找图纸,浪费不必要的时间。
4.0、使命与责任:4.1、在工作中遇到一些常见问题应自己先分析和解决,不要任何事情都依靠他人,如有实在解决不了的再找班长或组装帮忙解决。
4.2、在工作安排中如有不对或不合理的地方可以提出来,不能私自做主或用一种很不礼貌或带有争执的语言进行交谈,以免发生冲突,不能违背上级安排的工作,而不去理会或当作没听见,将会造成很不好的影响。
激光机使用手册4.0

对应工具条上的图标为 。
创建新的加工文件。
3.1.2打开(O)
对应工具条上的图标为 。
导入软件支持的数据,包括:﹡.LAS、﹡.PLT、﹡.BMP、﹡.DXF、﹡.DST、﹡.AI、﹡.dwg2等
3.1.3保存(S)
对应工具条上的图标为 。
将当前编辑的图形及加工参数保存为激光加工文件(﹡.LAS)。
起跳速度:雕刻时激光头运动的起始速度,该值太大会导致雕刻错位,太小会降低加工效率。
加速度:设定激光头从起跳速度加速到工作速度的加速度。
Y轴速度:设定Y轴推进时激光头运动的最高速度。该值太大会导致机器震动。
Y轴加速度:设定Y轴推进时激光头从起跳速度加速到Y轴速度的加速度。该值太大会导致机器震动。
3.1.11切割参数设置
一张
PCI控制卡,直接插到电脑的PCI插槽上
68针电缆连接线
一根
连接PCI控制卡与接线板
接线板
一个
将信号通过电缆线连接到控制设备
FV100模块
一个
将控制卡的激光功率信号转化为0-5V的标准的信号(选配件)
第二章
系统配置及安装
一、系统配置
1、操作系统:Window2000、WinXP操作系统。
2、硬件要求
激光雕刻切割控制系统DSP4.0
使用手册
第一章控制系统简介
一、控制系统性能简介
激光雕刻切割控制系统DSP4.0(以下简称控制系统)是针对大幅面高速激光雕刻、切割设备定制开发的控制系统。主要功能有:
A、支持AI、BMP、PLT、DXF、DST(田岛绣花软件)等图形图象数据格式。
B、系统调入图形图像数据后,可进行简单排版编辑(如缩放、旋转、复制等)。
英诺激光科技股份有限公司 AOC 激光器产品说明书

英诺激光科技股份有限公司版权所有不得翻印V3.0目录1、激光器安全 (4)1.1激光等级 (4)1.2激光安全职责 (4)1.3激光安全操作指南 (4)1.4危险及安全标识 (5)1.5AOC 激光器安全特性 (6)1.6保护承诺及政府要求的安全承诺 (6)2、激光器接口说明及随机配件 (7)2.1激光器尺寸 (7)2.2激光器接口说明 (11)2.3随机配件 (11)2.4INTERLOCK 接口 (12)2.5RS232 接口 (12)3、激光器使用要求及注意事项 (13)3.1 电气要求 (13)3.2 工作环境要求 (13)3.3 冷水机要求 (13)3.4 系统安装要求及使用注意事项 (14)4、AOC Ultrafast 激光控制软件安装要求 (15)4.1 软件列表及系统要求 (15)4.2 安装及使用问题解决方法 (15)5、激光系统新一代控制软件界面 (16)5.1 Basic界面说明 (16)5.2 Advanced菜单说明 (17)6、激光器基础操作 (18)6.1 激光器开机顺序 (18)6.2 激光器关机顺序 (20)7、Advanced POD模式简介 (21)8、POD模式下得激光控制方式 (23)8.1 控制方式简介 (23)8.2 控制信号要求 (23)9、激光器故障处理流程 (24)9.1 激光器报警提示及处理方法 (24)9.2 激光器常见故障排除方法 (26)1、激光器安全1.1 激光等级AOC 全系列激光器均属于Class IV 等级激光器(大于500mw),在中国根据GB 7247.1-2012, 同样被列为4 类。
1.2 激光安全职责AOC 全系列激光器是经精心设计并通过严格测试的,以保证其在合理使用条件下是安全可靠的。
如果不按照正确的安全指南进行操作,对人身和财产都是极其危险的,特别当激光的输出波长是裸眼不可见的时候,危险性也随之增加。
若操作人员因为没有按照本司激光器的正常使用规范来使用,由此产生的一切人身伤害,本司不承担任何法律责任。
激光焊接作业指导书
激光焊接作业指导书1.0目的通过规范激光焊接的操作,使得设备安全使用,有效保证产品质量;2.0范围适用本公司激光焊接;3.0作业流程1排版编程→2设备准备工作(工装夹具调试)→3上料至焊接平台→4组焊(先行首件加工)→5 首件检查→6批量生产4.0作业前准备4.1检查机器内循环水、外循环水是否达到规定范围;4.2检查机器表面无灰尘、花斑、油污等。
4.3开机4.3.1打开总电源开关,接通三相电源;4.3.2解除冷水机上的“紧急停止开关”,观察运行情况;4.3.3冷水机运行正常后,解除激光机上的“紧急停止开关”,然后打开“电源开关”;4.3.4点击显示屏上的“开机”按键,然后点击“确认开机”按键;4.3.5解除操作操作台上“紧急停止”开关,然后打开“电源开关”’;4.3.6启动操作面板;4.3.7检查激光焊接头是否正常;4.3.8检查各连接线及导轨是否正常;4.3.9打开氮气阀门,调节好用气流量;4.3.10输入当前要执行的工作参数;4.3.11执行焊接操作;4.4注意事项4.4.1在操作过程中,如遇到紧急情况(漏水、激光器有异常声音等)需快速切断整机供电时,可按激光机“紧急停止”红色按钮;4.4.2必须在操作前打开激光焊接的外循环水开关4.4.3因激光器系统采用水冷却方式,激光电源采用风冷却方式,若冷却系统出现故障,严禁开机工作;4.4.4不得随意拆卸机器内的任何部件,严禁在激光器工作时,用眼睛直视激光或反射激光,及用眼睛正对YAG激光器,以免眼睛受伤害;4.4.5不得把易燃、易爆材料放置到激光光路上或激光束可以照射到的地方,以免引起火灾和爆炸;4.4.6机器工作时,电路呈高压、强电流状态,严禁在工作时触摸机器内的各电路元器件;4. 4.7未经培训人员禁止操作本机器。
5.0日常维护保养6.0相关表格6.1《机床保养记录单》(激光焊机)。
莱卡DISTOTM D110 使用手册说明书

Leica DISTO TM D110 The original laser distance meter仪器设置 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 2简介 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 2概述 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 2显示屏- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 3插入电池- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 3装上/移除夹子- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 3操作流程 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 4开/关- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 4清除 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 4消息代码- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 4单位设置- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 4提示音开/关 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 4测量功能 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 5测量单一距离 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 5连续测量- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 5面积 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 5 Bluetooth® Smart- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 6技术参数 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 7消息代码 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 8保养- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 8废物处置 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 8保修期 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 8安全说明 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 9使用的符号 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 9允许使用- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 9禁止使用- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 9使用危害- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 9使用限制 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -9责任范围 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -10电磁兼容性 (EMC) - - - - - - - - - - - - - - - - - - - - - - - - - - - - -10通过 Bluetooth® 使用产品 - - - - - - - - - - - - - - - - - - - - - -10激光分类 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -10标识 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -11量之后测量值将立刻自动传输。
激光切割机操作说明

激光切割机操作说明一、激光切割机简介激光切割机是一种高精度、高效率的切割设备,广泛应用于金属加工、制造业等行业。
本文将详细介绍激光切割机的操作方法和注意事项。
二、操作准备1. 设备检查:确保激光切割机处于良好的工作状态,检查设备的冷却水、气源、光路系统等是否正常。
2. 材料准备:根据需要切割的材料类型和规格,准备相应的工件并将其放置在工作台上。
3. 加工参数设置:根据材料的性质和要求的切割效果,设置合适的激光功率、切割速度和焦距等参数。
三、操作步骤1. 打开电源:按照设备说明书上的指引,打开激光切割机的电源。
2. 导入设计文件:使用相应的软件将需要切割的图形或设计文件导入激光切割机的控制系统中。
3. 设置切割路径:根据设计要求,在控制系统中设置切割路径,包括起始点、终止点、切割顺序等。
4. 启动切割:按下切割按钮或者通过控制系统的指令,启动激光切割机进行切割操作。
5. 观察工作状态:在激光切割过程中,及时观察设备的工作状态,确保切割质量和安全。
6. 完成切割:等待激光切割机完成切割任务,切割过程中避免随意打开设备或移动工作台。
四、安全注意事项1. 穿戴防护设备:切割过程中必须佩戴适当的防护眼镜和耳塞,避免激光辐射和噪音对身体造成伤害。
2. 远离切割区域:在激光切割过程中,严禁靠近切割区域,以免被热辐射或喷溅的材料伤及皮肤。
3. 禁止触摸设备:切割机工作时,切忌触摸设备,以免造成意外伤害或干扰切割过程。
4. 正确使用气源:在使用激光切割机时,确保气源的供应稳定可靠,并严格遵守气源使用规范,避免发生安全问题。
5. 维护设备:定期对激光切割机进行保养和维护,清洁光路系统,检查冷却水的循环和过滤系统,确保设备的正常工作。
五、操作技巧与经验1. 选择合适的切割参数:根据不同的材料类型和厚度,调整激光功率、切割速度等参数,以获得最佳的切割效果。
2. 提前进行样品测试:对于切割要求较高的工件,可以事先进行样品测试,以确认切割参数和效果。
激光机操作指引书
苏州荣科精密机械有限公司版号/改次: 1/0激光机操作及维护作业指导书文件编号: RK-QM-01页次: 第 1 页共2页1.0目的1.1确保激光机的正常运行及操作人员的安全。
2.0适应范围2.1适应于激光机操作员。
3.0加工能力3.1SPCC Tmax=20mm SUS Tmax=10mm AL Wmax=8mm4.0操作顺序4.1首先打开空压机,再打开激光机变压器总开关,打开氧气氮气混合气开关,氧气气压应在0.5-1.0mpa之间,氮气气压应在200-250mpa之间,混合气气压应在0.3-0.5mpa之间,如气压太高或太低应及时调整。
4.2开机按下[POWER]绿色按钮约2秒,当屏幕上的数据和图像出现后打开[LASER]下边的绿色开关,当[LASER]绿色按钮亮着不在闪烁时,按下下面[HIGH YOLAGE]绿色按钮,当该绿色按钮亮着不闪烁时开机完成。
4.3按下模式状态下的[HOME]归零模式,再按一下左下角的[HOME]按钮,机床开始归零,直到X, Y, Z 灯亮,归零模式[OK],激光机即可工作。
4.4使用U盘传入程式及调出修改步骤,使用数据I/O画面可以在外部存储装置(USB存储装置)与CNC之间加载与保存一个程序,首先把编好的CNC程式从电脑传入U盘,将U盘插入机器USB 接口,按电脑面板上的[DATA I/0]键,在弹出的[DATA I/O]菜单自动地检测该装置中的内容显示在数据I/O画面的右侧,用鼠标点击EIA菜单,在弹出的画面右侧的程序文件列表中选择要加载的CNC程序文件,用鼠标点击下面菜单中的[LOAD]菜单,在弹出的对话框中点击[Start],CNC程序文件开始传送达到100%显示“COMPIETE’’信息,如传送失败则重新传送,传送成功点击yes,再点击[CIOSE],把程式传入机器电脑中。
程式调出步骤,按[GRAPH]键返回主页面,用鼠标点击右下角[FILE]菜单键,打开文件夹点击Eia文件找到所需要的图纸编号用鼠标左击一下,再用鼠标点击右下角的[CONFIRE]键打开,菜单面弹出的CNC程式文件进行修改,程式修改如下,首先修改加工坐标如G90G92X3065.Y1540.再修改加工条件如G82P2500Q1000R100(G82表示设定切割条件,R表示功率W,Q表示频率HZ,R表示占空比%),G88P100M56(G88表示设置辅助气体压力,P表示气压大小,M54表示氮气高压,M58表示氮气低压,M56表示氧气),G61在切割产品直角时为90度,G62在切割直角时会出现小R角,G64在切割直角时会出现大R角,在修改时务必该为G61避免配件不能组装,在修改程式中出现错误点击[CANCEL](取消)键,返回起点重新修改,修改好后用鼠标点击右下角的[SA VE]键保存,再用鼠标点击中间的[COMMAND]键返回主页面,手动按自动运行键[AUTO],最后按[CYCLE START]开始键即可。
OlympusFV1200激光共聚焦显微镜系统操作手册
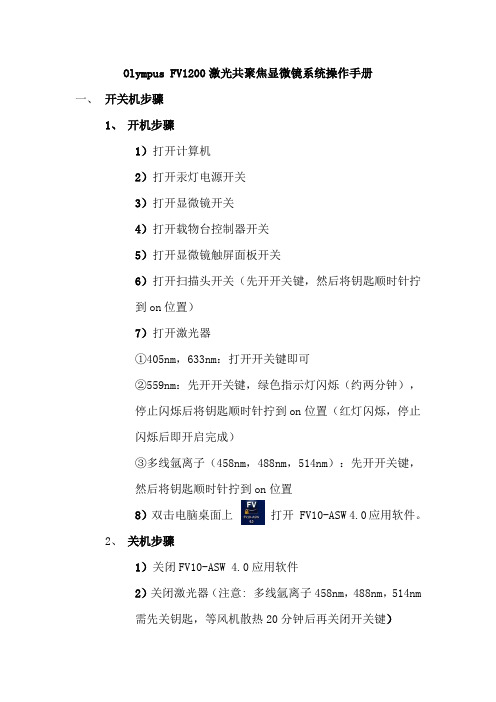
Olympus FV1200激光共聚焦显微镜系统操作手册一、开关机步骤1、开机步骤1)打开计算机2)打开汞灯电源开关3)打开显微镜开关4)打开载物台控制器开关5)打开显微镜触屏面板开关6)打开扫描头开关(先开开关键,然后将钥匙顺时针拧到on位置)7)打开激光器①405nm,633nm:打开开关键即可②559nm:先开开关键,绿色指示灯闪烁(约两分钟),停止闪烁后将钥匙顺时针拧到on位置(红灯闪烁,停止闪烁后即开启完成)③多线氩离子(458nm,488nm,514nm):先开开关键,然后将钥匙顺时针拧到on位置8)双击电脑桌面上打开 FV10-ASW 4.0应用软件。
2、关机步骤1)关闭FV10-ASW 4.0应用软件2)关闭激光器(注意: 多线氩离子458nm,488nm,514nm需先关钥匙,等风机散热20分钟后再关闭开关键)3)关闭扫描头(先将钥匙拧到off位置,再关开关键)4)关闭显微镜触屏面板5)关闭载物台控制器6)关显微镜开关7)关汞灯,先关前面off按钮,倒计时30s,再关后方开关键8)关计算机二、显微镜观察1、用触屏面板选择物镜;2、点击触屏面板EPI,选择需要的荧光滤片,如下图:紫外激发/蓝色光蓝色激发/绿色荧光绿色激发/红色荧光)打开,显微镜目镜下观察样品,推动载物台控制手柄可水平方向移动样品,转动调焦旋钮可调节焦距;三、获图XY多通道扫描1、镜下调好之后,点击软件中的按钮,关闭汞灯快门。
2、首先进行软件设置:在Acquisition Setting里将扫描速度设置为8us/Pixel,像素数一般设置为1024*1024。
在Image Acquisition Control里点击Dye List按钮,在染料列表中,双击用于观察的荧光染料(注:再次双击已选项目可取消),然后点击Apply按钮。
3、将Image Acquisition Control面板中Filter Mode里Kalman 打钩选中,设置线平均Line 2次,这样可以降低图像的噪声。
激光机操作手册-中文
本使用手册及其软件为广州华之尊版权所有Guangzhou Hzz Digital Techmology co., Ltd.保留一切权利广州华之尊不负责任何未依照操作手册使用所造成之损坏。
产品规格变动恕不另行通知。
广州华之尊数码科技有限公司GUANGZHOU HZZ DIGITAL TECHMOLOGY CO., LTD.地址:广州市龙口东路34号龙口科技大厦401电话:(020)87580799 87589162传真:(020)87586449网址:E-mail:*****************第一章安全事项1-1 安全事项声明ILS-III是一部安装容易的高效能切割/雕刻机器,依本手册所提供的方法安装及使用时,ILS-III雷射系统是符合美国CDRH安规中class 1的设备,非常的安全。
未遵守建议的安全程序可能会使您暴露在危险的雷射光路径中。
此外,在切割/雕刻时,不良的通风可能会使您暴露在有害的气体中。
请随时遵守安全规则。
请勿于通风不良的环境中操作本雷射系统。
换言之,为了了解安全的安装及操作程序,请花一点时间阅读本手册。
安全只是阅读本手册的好处之一。
除了安全外,还可避免于安装及操作本系统时发生挫折,并可学习操作诀窍,节省摸索测试的时间。
若您曾操作其它的雷射系统,请花一点时间熟悉ILS-III的规格。
若您从未操作过雷射系统,请特别仔细阅读安全章节。
雷射系统所发出的雷射光是无法以肉眼看到的,请熟知雷射光的路径,并且绝对不可以将身体的任何部份暴露于雷射光的路径上,否则可能造成严重灼伤及/或失明。
当广州华之尊的技术人员对雷射系统进行保养维护工作时,会让安全开关暂时失效,此时这个设备将会变成class 4的雷射系统,直射、反射及散射的雷射光都可能会造成危险。
请勿在没有完全了解相关安全程序及规则前尝试进行保养维护工作。
此外,为了防止可能发生的意外,例如加工时材料起火燃烧而造成火灾,雷射系统使用中,操作人员切勿离开现场!请忍住打开雷射开关尝试雕刻某些东西的诱惑,花几分钟时间阅读安全章节,以确保您及雷射系统的安全。
激光机操作指南
激光机操作指南【安全须知】1.绝对禁止将身体的任何一个部位放置在可能的激光通路上,包括但不限于:激光机左端的开放光路、横梁的封闭光路之内、激光头下方;女生注意头发不要卷入正在运行的激光机轨道中;2.小心激光机门等活动部件坠落或关闭时伤手;3.在对激光机足够熟悉之前,请勿使用垫铁等重物压平材料,以免光头碰撞重物造成光头损坏;4.激光机报警时(连续滴滴滴滴,响4次),应当停止切割,向助教或航模队队员报修;5.勿大力操作激光机,包括但不限于:面板按键、线路插头、激光机门等,以免造成机器损坏。
【切割之前】切割前需要的准备有图纸、材料等。
[图纸准备]按一般顺序为:绘图、编号、偏刀宽、排版、打断点、转格式等。
1.绘图绘图推荐使用CATIA,绘制三维图后投影至二维,转格式为*.dwg输出。
之后使用AutoCAD进行处理,初步的处理包括删去重线等等。
去重线可以考虑使用CAXA电子图版,有专门的功能,省时省力。
2.零件编号许多零件外形相似但有区别,如翼肋、隔框、桁条等,需要编号以明确零件。
编号应位于零件内部,刻在零件上,而并不切透。
因此编号需要使用与需要完全切透的边线和孔等特征不同的颜色,推荐边线使用bylayer(随层)(默认是黑色或白色),编号使用红色。
3.偏刀宽使用AutoCAD的offset(偏移)命令对切口宽度造成的材料尺寸损失进行补偿。
导入的图纸,大多数外形线是不相连接的,仅用offset命令需要一段线一段线地偏移,比较费力;而对于大部分零件来说,它们的外形是封闭的,可以先连接外形线再偏移。
具体做法为:输入命令pedit(编辑多段线)——回车——M(选择编辑多条多段线)——回车——用鼠标框选所有需要偏刀宽的外形线——右键确定——回车(同意将所选曲线转换为多段线)——J(接合线)——回车(同意默认连接距离)——回车(退出),这样所选框线会被连为一体,可以方便地进行之后的操作。
注意这里需要的图纸是没有重线的图纸,重线会造成难以预知的结果。
激光机机作业指导书

激光机机作业指导书标题:激光机机作业指导书引言概述:激光机是一种高精度的加工设备,广泛应用于电子、汽车、航空航天等行业。
为了保证激光机的正常运行和操作效率,制定一份详细的机作业指导书是非常必要的。
本文将从激光机的日常维护、安全操作、故障处理、加工参数设置和环境要求等方面进行详细阐述。
一、日常维护1.1 定期清洁激光机的外壳和内部零部件,防止灰尘和杂物堆积影响机器正常运行。
1.2 定期检查激光器、光学系统和冷却系统,确保各部件正常工作。
1.3 定期更换激光器和光学系统的耗材,如镜片、滤波器等,以保证加工质量。
二、安全操作2.1 操作人员必须穿戴符合要求的个人防护装备,如防护眼镜、手套等。
2.2 操作人员需接受相关培训,熟悉激光机的操作流程和安全规范。
2.3 在操作过程中,严禁将手部或其他物体伸入机器内部,以免造成伤害。
三、故障处理3.1 当激光机出现故障时,操作人员应立即停止操作,并通知维修人员进行处理。
3.2 维修人员应按照激光机的维修手册进行操作,严格按照流程进行故障排查和修复。
3.3 维修完成后,需进行全面的功能测试,确保激光机恢复正常工作状态。
四、加工参数设置4.1 在进行加工前,需根据加工材料的种类和要求,设置合适的激光功率和加工速度。
4.2 合理选择激光聚焦点的位置和焦距,以确保加工效果和精度。
4.3 定期检查激光机的加工参数设置,根据实际加工效果进行调整和优化。
五、环境要求5.1 激光机应放置在干燥通风的环境中,避免受潮和高温影响。
5.2 操作人员应保持工作区域整洁,避免杂物堆积影响激光机的正常运行。
5.3 激光机的周围应设置安全警示标识,提醒人员注意安全,避免意外发生。
结语:通过本文的激光机机作业指导书,操作人员可以更加全面地了解激光机的日常维护、安全操作、故障处理、加工参数设置和环境要求等内容,从而保证激光机的正常运行和加工效率。
希望所有操作人员能够严格按照指导书的规范进行操作,确保激光机的安全运行和加工质量。
激光机标准操作规程
激光机标准操作规程引言概述:激光机是一种高科技设备,广泛应用于医疗、工业、通信等领域。
然而,由于激光的高能量和高聚焦性,激光机的操作存在一定的风险。
为了确保激光机的安全使用和高效运行,制定一套标准操作规程是非常必要的。
本文将从五个大点出发,详细阐述激光机的标准操作规程。
正文内容:1. 激光机的日常维护1.1 定期检查激光机的外观和连接部件,确保无损坏和松动。
1.2 清洁激光机的镜片和透镜,以保证光束的质量。
1.3 检查激光机的冷却系统,确保冷却液的循环和温度稳定。
1.4 检查激光机的电源和电线,确保电气连接的可靠性。
1.5 定期校准激光机的功率和光束质量,以保证其性能稳定。
2. 激光机的安全操作2.1 穿戴适当的个人防护装备,如激光安全眼镜和防护服。
2.2 在操作激光机之前,确保工作区域清洁、整齐,避免杂物干扰。
2.3 避免直接凝视激光束,以免对眼睛造成损伤。
2.4 使用激光机时,避免将激光束照射到反射面上,以防危(wei)险的反射。
2.5 在操作激光机时,不得将手指或者其他物体放入激光束中,以免受伤。
3. 激光机的启动和关闭步骤3.1 在启动激光机之前,检查所有的安全装置是否正常。
3.2 按照操作手册的要求,挨次打开激光机的电源和冷却系统。
3.3 等待激光机预热,确保激光器达到工作温度。
3.4 启动激光机的控制系统,并设置合适的参数。
3.5 在关闭激光机时,按照像反的步骤进行,先关闭控制系统,然后关闭冷却系统和电源。
4. 激光机的故障排除4.1 当激光机浮现故障时,首先检查是否有错误提示或者警报。
4.2 根据操作手册提供的故障排除指南,逐步排除故障。
4.3 如果无法解决故障,及时联系激光机的供应商或者维修人员。
4.4 在排除故障之前,不得随意拆卸或者更换激光机的部件。
5. 激光机的应急处理5.1 在激光机发生事故或者紧急情况时,即将切断电源。
5.2 遵循应急处理程序,包括报警、疏散和急救等。
5.3 在事故处理完成后,进行事故分析和记录,以便后续改进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MPC03卡的开关量输入信号(限位、减速、原点和外部报警),可以是触点型开关,也可以是NPN输出的传感器接近开关等。其接线方法下图:
MPC03卡的脉冲/方向输出信号,作为步进电机或数字式伺服电机驱动器的控制信号,脉冲信号的频率决定电机的转速,脉冲信号的个数决定电机的转角。脉冲和方向信号的接线方法如下图所示:
移动距离:设置激光头定长移动的距离。
测试功率:测试激光时的功率大小,单位为百分比。最小功率为0,最大为100。
原点矫正:点击该按钮后,激光头会先慢速(空程速度(慢))移动到机器原点,然后快速(空程速度(快))移动到原点位置。该功能可以消除累计误差,一般开始加工前必须进行一次。本软件启动时将自动进行原点矫正(也可以选择不自动进行原点矫正)。
G、输出时有"走边框"功能,方便找到放料位置。
H、雕刻速度可以达到1500mm/s,曲线切割速度可以达到500mm/s,雕刻精度可以达到0.1mm。
I、360度坡度雕刻。坡度可以任意设置,速度无限制(要受激光加工深度的限制)。
J、大数据图形处理速度快。15M以上的数据瞬间即可处理完毕。
K、高速切割过程中,激光加工强度不变,保证了加工深度一致。
Z轴每运动:上图中的100.00表示Z轴步进电机每转一圈激光头移动的距离为100毫米。
需要发脉冲数:上图中的12800表示步进电机转动每转一圈需要的脉冲数。计算方法为:200×驱动器的细分数。
空程速度(快)
不出激光时,激光头运行的最快速度。激光头上下左右移动使用这个参数。该值太大会导致机器运行时震动较大。
点击“安装”即可,安装完成后,退出安装程序。
将加密狗插入“USB”接口即完成加密狗的安装。
3、控制卡的安装
控制卡的驱动程序在[Drivers]目录下。先关机,将控制卡插入PCI扩展槽中,然后开机。
系统检测到PCI卡后出现“发现新硬件”对话框,此时单击“取消”。
在[Drivers]目录下有两个文件夹[Win98-2000] [WinXP],分别为Win98、Win2000,WinXP操作系统下的驱动程序,双击该文件夹里的执行文件“SetupMpc03”“即出现以下对话框:
上移
41
EA4+
5V电源+
42
EA4-
走边框
43
EB4+
5V电源+
44
EB4-
开始/继续
45
EZ4+
5V电源+
46
EZ4-
左移-
47
48
49
PUL3-
脉冲3-
50
PUL3+
脉冲3+
51
DIR3-
方向3-
52
DIR3+
方向3+
53
PUL4-
脉冲4-
54
PUL4+
脉冲4+
55
DIR4-
方向4-
56
DIR4+
第三章软件操作说明
一、软件操作流程
1、主要处理流程
在CorelDraw(本系统支持9.0、11.0和12.0版本)、PhotoShop、AutoCAD下制作图形图像数据,启动控制系统,调入加工数据,配置加工参数,生成加工文件,输出数据进行加工。
2、加工过程流程图
3、系统主界面功能简介
3.1文件(F)
回原点:点击该按钮后,激光头会快速回到原点位置。
关闭激光:打开/关闭激光。
3.1.7模拟输出
对应工具条上的图标为 。
设置好加工参数后,点击该按钮,可以模拟输出,检查输出的效果。
3.1.8加工输出
对应工具条上的图标为 。
经模拟输出确认无误后,点击该按钮将加工数据输出到机器上。
3.1.9激光机设置
点击该按钮后,出现以下对话框:
工作台范围X:激光头横向移动的最大范围(单位为毫米)。
工作台范围Y:激光头纵向移动的最大范围(单位为毫米)。
(以上两个参数决定机器的有效加工幅面,该数值改变后,主界面上的坐标系也会相应地改变。)
X轴每运动:上图中的48.70表示X轴步进电机每转一圈激光头移动的距离为48.70毫米。
Y轴每运动:上图中的48.70表示Y轴步进电机每转一圈激光头移动的距离为48.70毫米。
一张
PCI控制卡,直接插到电脑的PCI插槽上
68针电缆连接线
一根
连接PCI控制卡与接线板
接线板
一个
将信号通过电缆线连接到控制设备
FV100模块
一个
将控制卡的激光功率信号转化为0-5V的标准的信号(选配件)
第二章
系统配置及安装
一、系统配置
1、操作系统:Window2000、WinXP操作系统。
2、硬件要求
3.1.4另存为(A)
将已经保存过的激光加工文件(﹡.LAS)保存为另外一个激光加工文件(﹡.LAS)。
3.1.5导出(E)
将当前编辑的图形文件保存为﹡.PLT。
3.1.6激光机测试(T)
对应工具条上的图标为 。
点击该按钮后,出现以下对话框:
上、下、左、右:定长移动激光头。点击一次,激光头移动一次。
B、本控制系统只需用2、3、4轴。3轴对应Y轴(推进轴),4轴对应X轴(扫描轴),
2轴用于自动送料。
C、激光信号的地线应与+5V电源的地线相连。
D、+24V电源不需接地。只要对原点开关的驱动能力足够,可以用5V电源。
E、开关电源关系到控制卡能否正常工作,请选择质量可靠,有稳压、滤波电路的电源。
F、红色标识的表示系统必须要连接的。
L、切割路径最优化,为用户提供多种路径优化方式。
M、切割时可以增加引入导出线,保证切割接缝处光滑平整。
N、独特的断点加工功能,即使停电也不会出现废品。
二、控制系统的组成
控制系统由硬件(控制卡)和软件两部分组成。硬件包括MPC03-LV控制卡一张、FV100模块一个(选配件)、连接电缆线一根和P68转接板一个;软件包括MPC03-LV控制卡驱动程序和控制软件。整个控制系统放在一个包装盒中,软件在光盘中。
点击“安装”按钮即可完成控制卡驱动程序的安装。
重新启动计算机,即完成控制卡驱动程序的安装。
三、软件的安装
本软件不需要安装,只需要将光盘内的文件拷贝到计算机硬盘即可。完成以上硬件安装步骤后,运行Bin目录下的“LaserCut”文件即可。
四、雕刻切割机的安装
1、雕刻机坐标系统和运动方向约定
2、按如下接线要求,将步进电机驱动器、开关电源、步进电机和原点开关信号接好。
空程速度(慢)
不出激光时,激光头运行的最快速度。短距离的上下左右移动和原点矫正时使用这个参数;开机不自动原点矫正时,上下左右移动也使用这个参数。该值太大会导致机器运行时震动较大并降低原点矫正的精度。
空程加速度(快)
激光头空程运行时从起始速度升速到空程速度(快)时的加速度。该值太大会导致机器运行时震动较大,太小又会降低加工效率,请根据机器实际情况调整。
接线板上引脚说明:
编号
名称
定义
编号
名称
定义
1
2
3
4
5
6
7
EA2+
5V电源+
8
EA2-
暂停
9
EB2+
5V电源+
10
EB2-
回原点
11
EZ2+
5V电源+
12
EZ2-
急停
13
14
GND5
+5V电源地
15
LASER
激光输出
16
17
18
FRQ/PWM
激光功率调整
19
PUL2-
脉冲2-
20
PUL2+
脉冲2+
21
起跳速度:雕刻时激光头运动的起始速度,该值太大会导致雕刻错位,太小会降低加工效率。
加速度:设定激光头从起跳速度加速到工作速度的加速度。
Y轴速度:设定Y轴推进时激光头运动的最高速度。该值太大会导致机器震动。
Y轴加速度:设定Y轴推进时激光头从起跳速度加速到Y轴速度的加速度。该值太大会导致机器震动。
3.1.11切割参数设置
空程加速度(慢)
激光头空程运行时从起始速度升速到空程速度(慢)时的加速度。该值太大会导致机器运行时震动较大,太小又会降低加工效率,请根据机器实际情况调整。
起始速度
空程运动时X、Y轴的起始速度,即初速度。最大速度由空程速度(快)空程速度(慢)决定。该值太大会导致机器运行时震动较大。
匀速运动速度
该参数定义匀速运动时(切割)速度值的上限,即如果设定的加工速度低于该值,则是匀速运动;如果设定的加工速度高于该值,则是变速运动,加速度等参数在“切割参数设置”内设置。
方向4+
57
DCV24
+24V电源正
58
ALM
外部报警输入
59
ORG3
原点3
60
ORG4
原点4
61
EL3+
正向限位3
62
EL4+
正向限位4
63
EL3-
负向限位3
64
EL4-
负向限位4
65
SD3+
正向减速3
66
SD4+
正向减速4
67
SD3-
负向减速3
68
SD4-
负向减速4
注:
A、除通用输入/输出信号外,信号名称中的2、3、4分别对应MPC03卡上的第2、3、4轴。
DIR2-
方向2-
22