《机械设计基础》第五版摆动导杆机构设计 2
(完整版)《机械设计基础》答案
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L或: 122427211229323=--=⨯-⨯-⨯=--=HL P P n F1-1122424323=-⨯-⨯=--=HL P P n F1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω11314133431==P P ω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω121214122421r P P ==ω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
在三角形ABC 中,BCA AB BC∠=sin 45sin 0,52sin =∠BCA ,523cos =∠BCA , 045sin sin BCABC AC=∠,mm AC 7.310≈s mm BCA AC P P v v P /565.916tan 1013141133≈∠⨯===ω1224212141P P P P ωω=s rad AC P P P P /9.21002101001122412142≈-⨯==ωω1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。
《机械设计基础》答案
在图中,从给定的条件可知,轮1和轮3的绝对转向相反,已 的值为正, 的值为负,代入上式中,则有
即
于是解得
其值为正,说明H的转向与轮1的转向相同。
5-10 在题5-10图所示机构中,已知 , , , , , , ,求:
(1)当 、 时,
(2)当 时,
键16×80 GB/T 1096-2003
同时可查得键的厚度尺寸
然后根据题10-8中传递的转矩,利用公式(10-26)及表10-10进行验算强度即可
第11章 齿轮传动
11-1
解:利用题中给定的条件可推导出:
11-4
解:本题为设计计算题,按照例题的步骤进行计算即可。
11-6
解:(1) ;(2) ;(3) ;(4)
解:
以踏板为主动件,所以最小传动角为0度。
2-6设计一曲柄摇杆机构。已知摇杆长度 ,摆角 ,摇杆的行程速比变化系数 。(1)用图解法确定其余三杆的尺寸;(2)用式(2-6)和式(2-6)'确定机构最小传动角 (若 ,则应另选铰链A的位置,重新设计)。
解:由K=1.2可得极位夹角
2-7 设计一曲柄滑块机构,如题2-7图所示。已知滑块的行程 ,偏距 ,行程速度变化系数 ,求曲柄和连杆的长度。
解:各偏心质量产生的质径积分别为:
于是不平衡质径积的向量和为:
即应在图示反方向的方位加上质径积 ,回转件才能达到平衡。
第10章 连接
10-4
解:设螺旋副的升角为 ,当量摩擦角为 ,当量摩擦系数用 表示
则
已知 ,则 ,
(1)工作台上升的效率为
(2)稳定上升时加于螺杆上的力矩为
(3)螺杆的导程为
则可得螺杆的转速为:
《机械设计基础》第五版第2章平面连杆机构

t1 (180 ) /
V1 C1C2 t1
C1C2 /(180 )
当曲柄以ω继续转过 φ 2=180-θ 时,摇杆从C1D, 置摆到C2D,所花时间为t2 , 平均速度为V2 ,那么有:
t2 (180 ) /
V2 C1C2 t2
C1C2 /(180 )
2 22
C 3
A
4
定块机构
机械设计基础-第2章平面连杆机构
三、含两个移动副的四杆机构
了解
正弦机构
正弦机构
双转块机构 (十字滑块机构)
双滑块机构
正切机构
机械设计基础-第2章平面连杆机构
缝纫机针杆运 动机构
十字沟槽联轴节
正切机构
椭圆仪
十字沟槽联轴节
机械设计基础-第2章平面连杆机构
四、具有偏心轮的四杆机构
例题
机械设计基础-第2章平面连杆机构
二.急回特性 平面四杆机构的极位 主动件:曲柄 从动件:摇杆
极位:从动件的两 个极限位置
极位夹角θ:从动件处于两个极 位时,曲柄两位置之间的夹角 最大摆角ψ:摇杆往复摆过的 最大角度
机械设计基础-第2章平面连杆机构
急回特性分析
当曲柄以ω逆时针转过 φ1=180°+θ时,摇杆从C2D 位 置 摆 到 C1D , 所 花 时 间 为 t1 , 平均速度为V1,那么有:
特例2 反平行双曲柄机构:对边平行但不相等
应用实例:车门启闭机构
反向双曲柄机构
车门启闭机构
机械设计基础-第2章平面连杆机构
3、双摇杆机构
结构特点:二连架杆均为摇杆 运动变换:摆动摆动
工程应用实例:
港口起重机 飞机起落架 车辆的前轮转向机构 造型机翻箱机构 风扇摇头机构
机械设计基础(第五版)课后习题答案(完整版)_杨可竺、程光蕴、李仲生主编_高等教育出版社.

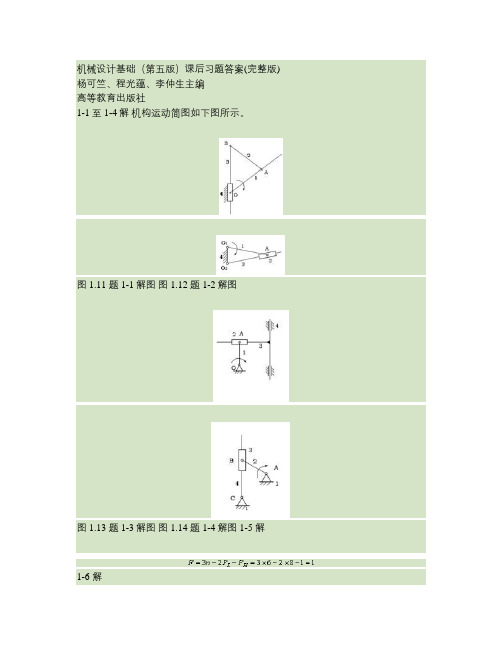
1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、(2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图 2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: (1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础(第五)课后习题答案(完整版)_杨可竺、程

1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、(2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图 2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: (1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础-(第五版)讲义2[35P][0.99MB]
![机械设计基础-(第五版)讲义2[35P][0.99MB]](https://img.taocdn.com/s3/m/51eb4883680203d8ce2f2413.png)
平行四边形机构(也称平行双曲柄机构)。
两个特性 :
①两曲柄同速同向转动; ②连杆作平动。
2-1 平面四杆机构的基本类型及其应 用
车门开闭机构
2-1 平面四杆机构的基本类型及其应 用
3. 双摇杆机构:两连杆架均为摇杆的四杆机构
应用举例: 港口起重机、飞机起落架、车辆的前轮转向机构
② 导杆机构
曲柄转动导杆机构
曲柄摆动导杆机构
2-1 平面四杆机构的基本类型及其应 用
③ 摇块机构
2
1
3
4
摇块机构
卡车车厢举升机构
2-1 平面四杆机构的基本类型及其应 用
④ 定块机构
2-1 平面四杆机构的基本类型及其应 用
2. 含两个移动副的四杆机构
① 曲柄移动导杆机构(正弦机构)
2-1 平面四杆机构的基本类型及其应 用
2-1 平面四杆机构的基本类型及其应 用
港口起重机
选择连杆上合适的点,轨迹为近似的水平直线
2-1 平面四杆机构的基本类型及其应 用
飞机起落架
2-1 平面四杆机构的基本类型及其应 用
车辆的前轮转向机构
2-1 平面四杆机构的基本类型及其应 用 二、铰链四杆机构的演化
演化常用的方式
①改变运动副类型;
重点哦 !
2-2 平面四杆机构的基本特性
2. 铰链四杆机构类型的判断
1)若不满足杆长和条件,则为双摇杆机构;
2)若满足杆长和条件:
① 取最短杆为机架,得双曲柄机构; ② 取最短杆的邻边杆为机架,得曲柄摇杆机构; ③ 取最短杆的对边杆为机架,得双摇杆机构。
2-2 平面四杆机构的基本特性 二、急回特性
平面连杆机构的缺点
数控机械获奖作品推荐 机械设计基础模块五任务一:设计牛头刨床摆动导杆机构
4/36
教学设计
教学设想
教学环节
在教学过程中为学 生演示形象直观的动画, 采用多种互动方式,激 发学生的学习兴趣,调 动学生的学习热情,使 学生积极主动参与课堂 教学,巧妙的解决本节 课的教学重点和难点, 使学生的自学能力、合 作能力得到锻炼和提高。
共2学时:第1学时+第2学时
(三)其他机构
(四)知识小构
二、平面四杆机构的演化(铰链四杆机构的演化)
取不同构件为机架
(一)曲柄滑块 曲柄滑块机构
导杆机构、摇块机构、定块机构
机构(P162) 1、导杆机构
(二)偏心轮机构 (1)演化过程:在曲柄滑块机构中,将曲柄改为
(P162)
机架时,就演化成导杆机构。
(P162)
(三)其他机构 (P164)
(四)知识小结 与挑战平台
29/36
二、平面四杆机构的演化(铰链四杆机构的演化)
(一)曲柄滑块 机构(P162)
取不同构件为机架
曲柄滑块机构
导杆机构、摇块机构、定块机构
2、摇块机构 (2)应用:
(二)偏心轮机构
(P162)
(三)其他机构 (P164)
(四)知识小结 与挑战平台
同学们:检验你们的 时刻到了!
(四)知识小结 与挑战平台
18/36
活动规则
把学生平均分成4个小组,教师提出问题,各小组 抢答,抢答正确得分,抢答错误扣分,分值为5至1 分的题目,总分最高的小组有惊喜。。。。。。
5分
1 2
1分
6
4
5
19/36
11、、搅答拌案器:机搅构拌是器什机么构机是构曲?柄摇杆机构
机械设计基础部分例题答案
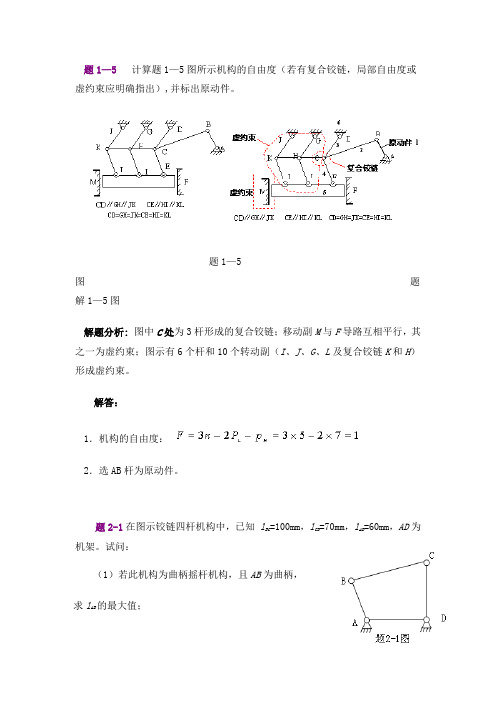
题1—5 计算题1—5图所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并标出原动件。
题1—5图题解1—5图解题分析: 图中C处为3杆形成的复合铰链;移动副M与F导路互相平行,其之一为虚约束;图示有6个杆和10个转动副(I、J、G、L及复合铰链K和H)形成虚约束。
解答:1.机构的自由度:2.选AB杆为原动件。
题2-1在图示铰链四杆机构中,已知l BC=100mm,l CD=70mm,l AD=60mm,AD为机架。
试问:(1)若此机构为曲柄摇杆机构,且AB为曲柄,求l AB的最大值;(2)若此机构为双曲柄机构,求l AB 最小值; (3)若此机构为双摇杆机构,求l AB 的取值范围。
解题分析:根据铰链四杆机构曲柄存在条件进行计算分析。
在铰链四杆机构中,若满足杆长条件,以最短杆或最短杆相邻的杆为机架,机构则有曲柄,否则无曲柄;若不满足杆长条件,无论取哪个构件为机架,机构均为无曲柄,即为双摇杆机构。
解答:1.因为AD 为机架,AB 为曲柄,故AB 为最短杆,有AD CD BC AB l l l l +≤+,则m m30)1006070(=-+=-+≤BC AD CD AB l l l l故 mm30max =AB l2.因为AD 为机架,AB 及CD 均为曲柄,故AD 杆必为最短杆,有下列两种情况:若BC 为最长杆,则 m m100=<BC AB l l ,且AB CD BC AD l l l l +≤+,则m m90m m )7010060(=-+=-+≥CD BC AD AB l l l l得 m m 100m m 90≤≤AB l若AB 为最长杆,则m m100=>BC AB l l ,且BC CD AB AD l l l l +≤+,故m m110m m )6070100(=-+=-+≤AD CD BC AB l l l l得m m 110m m 100≤≤AB l故m m 90min =AB l3.如果机构尺寸不满足杆长条件,则机构必为双摇杆机构。
机械设计基础课后习题答案(第五版)(完整版)
机械设计基础课后习题答案(第五版)(完整版)机械设计基础(第五版)课后习题答案(完整版)高等教育出版社杨可竺、程光蕴、李仲生主编9-1答退火:将钢加热到一定温度,并保温到一定时间后,随炉缓慢冷却的热处理方法。
主要用来消除内应力、降低硬度,便于切削。
正火:将钢加热到一定温度,保温一定时间后,空冷或风冷的热处理方法。
可消除内应力,降低硬度,便于切削加工;对一般零件,也可作为最终热处理,提高材料的机械性能。
淬火:将钢加热到一定温度,保温一定时间后,浸入到淬火介质中快速冷却的热处理方法。
可提高材料的硬度和耐磨性,但存在很大的内应力,脆性也相应增加。
淬火后一般需回火。
淬火还可提高其抗腐蚀性。
调质:淬火后加高温回火的热处理方法。
可获得强度、硬度、塑性、韧性等均较好的综合力学性能,广泛应用于较为重要的零件设计中。
表面淬火:迅速将零件表面加热到淬火温度后立即喷水冷却,使工件表层淬火的热处理方法。
主要用于中碳钢或中碳合金钢,以提高表层硬度和耐磨性,同时疲劳强度和冲击韧性都有所提高。
渗碳淬火:将工件放入渗碳介质中加热,并保温一定时间,使介质中的碳渗入到钢件中的热处理方法。
适合于低碳钢或低碳合金钢,可提高表层硬度和耐磨性,而仍保留芯部的韧性和高塑性。
9-2解见下表9-3解查教材表9-1,Q235的屈服极限查手册GB706-88标准,14号热轧工字钢的截面面积则拉断时所所的最小拉力为9-4解查教材表9-1,45钢的屈服极限许用应力把夹紧力向截面中心转化,则有拉力和弯距截面面积抗弯截面模量则最大夹紧力应力分布图如图所示图9.3 题9-4解图9-5解查手册,查手册退刀槽宽度,沟槽直径,过渡圆角半径,尾部倒角设所用螺栓为标准六角头螺栓,对于的螺栓,最小中心距,螺栓轴线与箱壁的最小距离。
9-6解查手册,当圆轴时,平键的断面尺寸为且轴上键槽尺寸、轮毂键槽尺寸。
图9.5 题9-6解图9-7解(1)取横梁作为示力体,当位于支承右侧处时由得由得由得由得(2)横梁弯矩图图9.7 题9-7解图(3)横梁上铆钉组的载荷力矩水平分力垂直分力9-8解水平分力在每个铆钉上产生的载荷垂直分力在每个铆钉上产生的载荷力矩在每个铆钉上产生的载荷各力在铆钉上的方向见图所示图9.9 题9-8解图根据力的合成可知,铆钉1的载荷最大9-9解铆钉所受最大载荷校核剪切强度校核挤压强度均合适。
《机械设计基础》答案.. (2)
离心力与重力之比为:
8-4 如图所示盘形回转件,经静平衡试验得知,其不平衡质径积 等于 ,方向沿 。由于结构限制,不允许在与 相反方向上加平衡质量,只允许在 和 方向各加一个质径积来进行平衡。求 和 的数值。
解:依题意可得:
于是可解得:
8-5 如图所示盘形回转件上有4个偏置质量,已知 , , , , , , , ,设所有不平衡质量分布在同一回转面内,问应在什么方位、加多大的平衡质径积才能达到平衡?
解:(1)推程:
推程角:
从动件的位移方程:
从动件的行程:
00
500
1000
1500
(mm)
0
2.01
27.99
30
(2)回程:
回程角:
从动件的位移方程:
00
400
800
1200
(mm)
30
27.99
2.01
0
于是可以作出如下的凸轮的理论轮廓曲线,再作一系列的滚子,绘制内包络线,就得到凸轮的实际轮廓曲线(略)
5-1 在题5-1图所示双级蜗轮传动中,已知右旋蜗杆1的转向如图所示,试判断蜗轮2和蜗轮3的转向,用箭头表示。
5-2 在题5-2图所示轮系中,已知 , , , , , , (右旋), , ,若 ,求齿条6线速度 的大小和方向。
解:
方向为水平向右。
5-3 在题5-3图所示钟表传动示意图中,E为擒纵轮,N为发条盘,S、M、H分别为秒针、分针、时针。设 , , , , , , , , , , , ,求秒针与分针的传动比 和分针与时针的传动比 。
时
方向如图中所示
当 时
方向如图中所示
第二章 平面连杆机构
2-1 试根据题2-1图所注明的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
机械设计基础(第五版)(2)(作者:杨柯桢)ppt教案1

Gear driving
in the same direction
mechanism:A system of elements with certain motion arranged to
transmit motion examples:
gear mechanism——传递运动 cam mechanism——转换运动
link:kinetic cell。For example:
Retrospect of the mechanical engineering history
Conclusion:
Perhaps, we are difficult to prospect the development of mechanical science and technology .
example:internal-combustion engine
The Object to be investigated
Machine 1. Composed of man-made elements 2. The elements arranged to transmit motion 3. Can transmit energy, and fulfill certain work for human being
Car with the brand --“雷 诺” come out in 1898
In 1927 An American called Lindberg flied Across the Atlantic Ocean with this air plane
The inner combustion engine pushed the invention of Automobile and airplane forward
《机械设计基础》平面机构运动简图及自由度

一、铰链四杆机构
铰链四杆机构:以铰 链连接的四杆机构。 AD为机架,AB、DC为 连架杆,BC为连杆。
1、曲柄摇杆机构
曲柄:能做360°整周转动的连架杆。 摇杆:只能做小于360°摆动连架杆。
1为曲柄, 3为摇杆, 2为连杆, 4为机架。
2、双曲柄机构
两个连架杆均为曲柄(均可作整周转动)。
振动筛机构
例3-3
已知lBC=120mm,lCD=90mm,lAD=70mm,AD为机架。 (1)若该机构能成为曲柄摇杆机构,且AB为曲柄,求lAB. (2)若该机构能成为双曲柄机构,求lAB. (3)若该机构能成为双摇杆机构,求lAB.
则lAB ≤40mm. (2) 有两种情况:lBC最长,或lAB最长;100mm ≤ lAB ≤140mm (3)有三种情况; Ⅰ、AB最短、BC最长 40mm< lAB <70mm
第二章
平面机构运动简图及 自由度
机构由构件组成. 平面机构:所有构件都在同一平面或相互 平行的平面内运动的机构.
二、运动副及其分类
运动副:两构件直接接触并能保持一定形 式相对连接。 如:活塞与缸体 ,活塞与连杆的连接。 不同的运动副对运动的影响不同。 运动副分类: 按接触形式分: 低副和高副。
1、低副
步骤:按给定K 算出 置几何关系 + 辅助条件 寸参数。 按极限位 确定机构尺
例:3-1 已知曲柄摇杆机构的摇杆CD的长度,摆 角 和行程速比系数K,设计该机构。
k 1 步骤:(1)求 : k 1 (2)任选D点,选比例,按CD长度和摆角, 作出摇杆的两极限位置C1D、C2D 。 (3)连接C1C2,并作C1C2的垂线C1M 。
本例 实质是确定曲柄转动中心A(有无穷多解)
杨可桢《机械设计基础》(第5版)笔记和课后习题(平面连杆机构)

第2章平面连杆机构2.1复习笔记平面连杆机构是由若干构件用低副连接组成的平面机构。
优点:构件的运动形式多样,可以实现给定运动规律或运动轨迹;低副以圆柱面或平面相接触,承载能力高,耐磨损,制造简单,易获得较高的制造精度。
缺点:不易精确实现复杂的运动规律,且设计较为复杂;当构件数和运动副数较多时,效率较低。
一、平面四杆机构的基本类型及其应用按照所含移动副数目的不同,可分为3类:全转动副的铰链四杆机构、含一个移动副的四杆机构以及含两个移动副的四杆机构。
1.铰链四杆机构图2-1全部用转动副相连的平面四杆机构称为平面铰链四杆机构,简称为铰链四杆机构,如图2-1所示。
其中,机构的固定构件4称为机架,与机架用回转副相连接的杆1和杆3称为连架杆,不与机架直接连接的杆2称为连杆,能作整周转动的连架杆1称为曲柄,仅能在某一角度摆动的连架杆3称为摇杆。
按照连架杆是曲柄还是摇杆,铰链四杆机构分为三种基本形式:曲柄摇杆机构、双曲柄机构和双摇杆机构。
2.含一个移动副的四杆机构此类型的四杆机构主要有四种形式:曲柄滑块机构、导杆机构、摇块机构和定块机构,分别如图2-2所示。
曲柄滑块机构导杆机构摇块机构定块机构图2-23.含两个移动副的四杆机构含有两个移动副的四杆机构称为双滑块机构。
按照两个移动副所处位置的不同,又可分为四种形式:(1)正切机构:两个移动副不相邻;(2)正弦机构:两个移动副相邻且其中一个移动副与机架相关联;(3)两个移动副相邻且均不与机架相关联;(4)两个移动副都与机架相关联。
正切机构正弦机构两移动副相邻且均不与机架相关联的机构两个移动副都与机架相关联的机构图2-34.具有偏心轮的四杆机构该种机构如图2-4(a)、(b)所示,相对应的机构简图分别如图2-4(c)、(d)所示。
(a)(b)(c)(d)图2-4偏心轮广泛应用于传力较大的剪床、冲床、颚式破碎机、内燃机等机械中。
5.四杆机构的扩展实际生产应用中的某些多杆机构是由若干个四杆机构组合扩展形成的,如图2-5和图2-6所示。
《机械设计基础》答案 (3)

则其分度圆直径分别为
4-3已知一正常齿制标准直齿圆柱齿轮的齿数 ,齿顶圆直径 ,求该轮的模数。
解:
正常齿制标准直齿圆柱齿轮:
则有
4-4 已知一正常齿制标准直齿圆柱齿轮 , , ,试分别求出分度圆、基圆、齿顶圆上渐开线的曲率半径和压力角。
解:
齿顶圆压力角:
基圆压力角:
分度圆上齿廓曲率半径:
解:(1)根据题已知条件可得:
工作行程曲柄的转角
则空回程曲柄的转角
摇杆工作行程用时7s,则可得到空回程需时:
(2)由前计算可知,曲柄每转一周需时12s,则曲柄每分钟的转数为
2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD在水平位置上下各摆100,且 。(1)试用图解法求曲柄AB和连杆BC的长度;(2)用式(2-6)和式(2-6)'计算此机构的最小传动角。
齿顶圆上齿廓曲率半径:
基圆上齿廓曲率半径:
4-6 已知一对内啮合正常齿制标准直齿圆柱齿轮 , , ,试参照图4-1b计算该对齿轮的中心距和内齿轮的分度圆直径、齿顶圆直径和齿跟圆直径。
解:该对齿轮为内啮合,所以有
中心距
齿轮2为内齿轮,所以有
4-10 试与标准齿轮相比较,说明正变位直齿圆柱齿轮的下列参数: 、 、 、 、 、 、 、 、 、 ,哪些不变?哪些起了变化?变大还是变小?
2-12 已知某操纵装置采用铰链四杆机构。要求两连架杆的对应位置如题2-12图所示, , ; , ; , ;机架长度 ,试用解析法求其余三杆长度。
解:由书35页图2-31可建立如下方程组:
消去δ,并整理可得:
令:
(1)
(2)
(3)
于是可得到
分别把两连架杆的三个对应转角带入上式,可得到关于P1、P2、P3由三个方程组成的方程组。可解得:
机械设计基础(第五版)课后习题答案(参考)

机械设计基础(第五版)课后习题答案) 杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图 1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定则解得故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。
4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为。
机械设计基础(第五版)课后习题答案(整理版)要点
机械设计基础(第五版)课后习题答案(完整版) 杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图 1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:向垂直向上。
,方1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由分度圆直径4-3解由可得模数得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为 0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定故当齿数于齿根圆。
则解得,基圆小时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径正好在刀具 4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段。
即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为再根据渐开线的特性:发生线沿基圆滚过的长度,等于基圆上被滚过的弧长,可知:AC对于任一渐开线齿轮,基圆齿厚与基圆齿距均为定值,卡尺的位置不影响测量结果。
机械设计基础(第五版)课后习题答案(完整版)
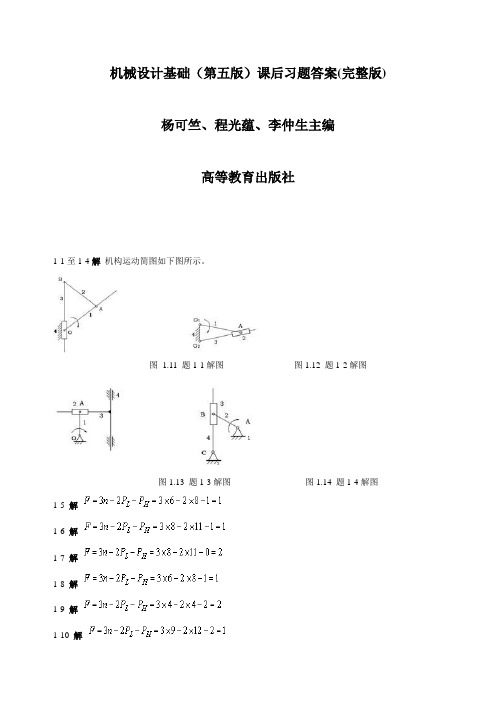
图 2.16 题 2-4 解 : ( 1 )由公式
,并带入已知数据列方程有:
因此空回行程所需时间
;
( 2 )因为曲柄空回行程用时 ,
转过的角度为
,
因此其转速为:
转 / 分钟
题 2-5
解 : ( 1 )由题意踏板 在水平位置上下摆动 ,就是曲柄摇杆机构中摇杆的极限位置,此时
曲柄与连杆处于两次共线位置。取适当比例 图 尺,作出两次极限位置
,轮 2 与轮 1 的转向相反。
自由度为零,为一刚性桁架,所以构件之间不能产生相对运 动。 ( 2)图 b 中的 CD 杆是虚约束,去掉与否不影响机构的运动。故图 b 中机构的自由度为:
所以构件之间能产生相对运动。
题 2-1 答 : a )
,且最短杆为机架,因此是双曲柄机构。
b)
,且最短杆的邻边为机架,因此是曲柄摇杆机构。
60°
22.347 55.943 240°
-24.684 -59.949
70°
13.284 61.868 250°
-12.409 -59.002
80°
2.829 66.326 260°
-1.394 -56.566
90°
-8.778 68.871 270°
8.392 -53.041
100°
-21.139 69.110 280°
0
0
根据上表 作图如下:
图 3-19 题 3-6 解图 3-7 解:从动件在推程及回程段运动规律的位移方程为:
1.推程:
0°≤ ≤ 120°
2.回程:
0°≤ ≤120 °
计算各分点的位移值如下:
总转角( °)0 15 30 45 60 75 90 105
机械设计基础(第五版)课后习题答案详解

第1 章平面机构的自由度和速度分析1. 1 重点内容提要1 .1 .1 教学基本要求( 1) 掌握运动副的概念及其分类。
( 2) 掌握绘制机构运动简图的方法。
( 3) 掌握平面机构的自由度计算公式。
( 4) 掌握速度瞬心的概念, 能正确计算机构的瞬心数。
( 5) 掌握三心定理并能确定平面机构各瞬心的位置。
( 6) 能用瞬心法对简单高、低副机构进行速度分析。
1 .1 .2 构件和运动副及其分类1. 构件构件是机器中独立的运动单元体, 是组成机构的基本要素之一。
零件是机器中加工制造的单元体, 一个构件可以是一个零件, 也可以是由若干个零件刚性联接在一起的一个独立运动的整体。
构件在图形表达上是用规定的最简单的线条或几何图形来表示的, 但从运动学的角度看, 构件又可视为任意大的平面刚体。
机构中的构件可分为三类:( 1) 固定构件( 机架)。
用来支承活动构件(运动构件) 的构件, 作为研究机构运动时的参考坐标系。
( 2) 原动件( 主动件)。
又称为输入构件, 是运动规律已知的活动构件, 即作用有驱动力的构件。
( 3) 从动件。
其余随主动件的运动而运动的活动构件。
( 4) 输出构件。
输出预期运动的从动件。
其他从动件则起传递运动的作用。
2. 运动副运动副是由两构件组成的相对可动的联接部分, 是组成机构的又一基本要素。
由运动副的定义可以看出运动副的基本特征如下:( 1) 具有一定的接触表面, 并把两构件参与接触的表面称为运动副元素。
( 2) 能产生一定的相对运动。
因此, 运动副可按下述情况分类:( 1) 根据两构件的接触情况分为高副和低副, 其中通过点或线接触的运动副称为高副, 以面接触的运动副称为低副。
( 2) 按构成运动副两构件之间所能产生相对运动的形式分为转动副(又称为铰链) 、移动副、螺旋副和球面副等。
( 3) 因为运动副起着限制两构件之间某些相对运动的作用, 所以运动副可根据其所引入约束的数目分为Ⅰ级副、Ⅱ级副、Ⅲ级副、Ⅳ级副和Ⅴ级副。