气动参数识别资料
气动参数识别资料

]
方法改进主要体现在提高精度和稳定性上
同济大学土木工程防灾国家重点实验室
5. 气动导纳识别
5.1 气动导纳定义
抖振力时域表达式:Lb(t)
UB 2
[2CLu(t)
(CL'
CD )w(t)]
Db (t)
UB 2 [2CDu(t)
(CL
CD' )w(t)]
M b (t )
抖振力频域表达式:
UB 2
建筑结构
天平测力试验 (Force balance test) 表面测压试验 (Cladding load test) 气弹模型试验 (Aeroelastic model test)
节段模型试验 (Sectional model test) 桥梁结构 拉条模型试验 (Taut strip model test)
|2
Su (w) CM'2
| Mw
|2
Sw ( w)]
气动导纳:χLu,χLw,χDu,χDw,χMu,χMw
同济大学土木工程防灾国家重点实验室
5.2 简化识别方法
假定: 公式:
| L |2 | Lu |2 | Lw |2 | D |2 | Du |2 | Dw |2 | M |2 | Mu |2 | Mw |2
气弹模型试验 (Aeroelastic model test)
同济大学土木工程防灾国家重点实验室
1.4 主要试验设备
(1)皮托管测压—平均风速
P st a t i c
P total
Pt
Ps
Pd
P0
1 2
aU
2
Pd
Pt
Ps
1 2
aU 2
常见飞行器气动参数或气动模型

常见飞行器气动参数或气动模型一、气动参数1. 参考面积(Reference Area):指飞行器所受气动力和气动力矩计算所采用的参考面积,通常以机翼参考面积为主。
2. 升力系数(Lift Coefficient):是描述飞行器升力大小的无量纲参数,用CL表示。
它是升力与动压和参考面积的比值,即CL = Lift / (0.5 * ρ * V^2 * S),其中ρ为空气密度,V为飞行速度,S为参考面积。
3. 阻力系数(Drag Coefficient):是描述飞行器阻力大小的无量纲参数,用CD表示。
它是阻力与动压和参考面积的比值,即CD = Drag / (0.5 * ρ * V^2 * S)。
4. 升阻比(L/D Ratio):指飞行器产生升力与阻力的比值,即L/D = Lift / Drag。
升阻比越大,飞行器的滑行距离越短,燃油消耗也越低。
5. 抗阻形状系数(Form Drag Coefficient):描述飞行器由于外形造成的阻力大小,包括与速度平方成正比的压力阻力和与速度的一次方成正比的摩擦阻力。
6. 诱导阻力系数(Induced Drag Coefficient):描述飞行器由于产生升力而产生的阻力大小,主要与升力系数和升力分布相关。
诱导阻力主要由翼尖涡引起。
7. 压力阻力系数(Pressure Drag Coefficient):描述飞行器由于气流压力变化而产生的阻力大小,主要与形状相关。
8. 摩擦阻力系数(Skin Friction Drag Coefficient):描述飞行器由于气流与飞行器表面摩擦而产生的阻力大小,主要与表面粗糙度相关。
9. 升力线性度(Linearity of Lift):指飞行器升力系数与迎角之间的线性关系程度。
线性度越好,飞行器的稳定性和控制性能越好。
10. 迎角(Angle of Attack):指飞行器机身或机翼与飞行方向之间的夹角。
适当的迎角可以增加升力和阻力,但超过一定范围会导致失速。
气动螺丝刀参数-概述说明以及解释

气动螺丝刀参数-概述说明以及解释1.引言1.1 概述:气动螺丝刀是一种广泛应用于工业生产中的工具,其主要作用是用来拧紧或卸下螺丝。
在工业生产中,螺丝连接是非常重要的一环,而气动螺丝刀的性能参数直接影响着螺丝的拧紧质量和效率。
为了更好地掌握和应用气动螺丝刀,了解和熟悉其参数是至关重要的。
不同的工作场景和需求会对气动螺丝刀的参数有不同的要求,因此在选择合适的气动螺丝刀时需要考虑到各种参数的影响和作用。
本文将重点介绍气动螺丝刀的参数,以帮助读者更加全面地了解气动螺丝刀的特性和应用。
通过深入了解气动螺丝刀参数的重要性和选择的考虑因素,读者能够更好地应用气动螺丝刀,并提高工作效率和质量。
1.2 文章结构本文将会分为三个主要部分,分别是引言、正文和结论。
在引言部分,将会对气动螺丝刀参数进行概述,介绍文章的结构和目的,为读者提供一个全面的了解。
在正文部分,将会着重讨论气动螺丝刀参数的重要性、主要的参数以及参数选择的考虑因素。
通过对这些内容的探讨,读者可以更加深入地了解气动螺丝刀参数对工作效率和产品质量的影响。
最后,在结论部分,将会总结气动螺丝刀参数的影响,提出应用建议并展望未来的发展方向。
通过这一部分的内容,读者将能够更好地理解气动螺丝刀参数的重要性,并为实际应用提供参考。
1.3 目的本文旨在探讨气动螺丝刀参数的重要性及其在实际应用中的影响。
通过研究主要的气动螺丝刀参数和参数选择的考虑因素,希望能够为工程师和生产人员提供相关参数选择的参考依据,从而提高生产效率和产品质量。
通过本文的阐述,读者可以更加全面地了解气动螺丝刀参数的作用和重要性,为实际应用提供指导意见,促进行业的发展和进步。
2.正文2.1 气动螺丝刀参数的重要性:气动螺丝刀是一种广泛应用于工业生产中的工具,常用于拧紧或松开各种螺丝。
而气动螺丝刀的性能和使用效果直接受其参数的影响。
因此,了解和掌握气动螺丝刀参数的重要性不言而喻。
首先,正确的气动螺丝刀参数能够保障工具的稳定性和效率。
气动系统识别及原理认识培训课件

气动系统的发展历程
总结词
气动系统自20世纪40年代诞生以来,经历了从简单到复杂、从低级到高级的发展过程。
详细描述
气动系统的雏形可以追溯到20世纪40年代,当时人们开始利用压缩空气来驱动一些简 单的机械装置。随着科技的不断进步和工业生产的不断发展,气动系统的应用越来越广 泛,技术也日趋成熟。如今,气动系统已经成为现代工业自动化生产中不可或缺的重要
THANKS FOR WATCHING
感谢您的观看
气动系统设计实例分析
总结词
气动系统设计实例分析
详细描述
通过对实际应用中的气动系统进行案例分析,深入了解气动系统的设计思路、元 件选型、回路配置和控制策略等方面的实际应用,提高对气动系统的理解和应用 能力。
实践操作与经验分享
总结词
实践操作与经验分享
详细描述
通过实践操作,掌握气动元件的安装、调试和使用,了解实际应用中可能遇到的问题和解决方法,同 时分享经验,促进团队成员之间的交流和学习。
压缩空气的传输
通过管道、阀门、过滤器 等设备将压缩空气输送到 气动装置。
气动控制原理
气动控制阀的分类
控制回路
压力控制阀、流量控制阀、方向控制 阀等。
通过组合各种控制阀,实现复杂的控 制逻辑和自动化控制。
气动控制阀的工作原理
利用压缩空气的能量,通过调节阀内 元件的开启度或方向,实现对气动系 统的控制。
气动系统识别及原理认识培训课件
目录
• 气动系统简介 • 气动元件识别 • 气动工作原理 • 气动系统维护与故障排除 • 气动系统设计与实践
01 气动系统简介
气动系统的定义与组成
总结词
气动系统是一种利用压缩空气来传递能量的系统,主要由气源、控制元件、执行元件和辅助元件四部分组成。
气动阀门参数

气动阀门参数气动阀门是一种常用的控制设备,通过气动执行机构控制阀门的开关,用于调节介质的流量、压力和方向。
气动阀门的参数对于其在工业生产和流程控制中的应用非常重要。
本文将从气动阀门的类型、参数及其对应的影响因素进行详细的介绍。
一、气动阀门的类型1. 根据阀门结构类型可以分为截止阀、调节阀、止回阀等。
2. 根据阀门的控制方式可以分为手动阀门和自动阀门,自动阀门中又可分为气动阀门、电动阀门等。
3. 根据阀门的工作原理可以分为膜片阀、球阀、蝶阀、旋塞阀等多种类型。
二、气动阀门的参数1. 压力等级:气动阀门的压力等级一般包括工作压力和试验压力。
工作压力是指阀门在正常工作条件下承受的压力;试验压力则是指阀门在验收或试验时所承受的压力。
2. 泄漏等级:气动阀门的泄漏等级是指阀座与阀瓣之间泄漏的情况,通常使用零级、一级、二级等等来表示泄漏等级,零级为最低泄漏等级。
3. 流量特性:气动阀门的流量特性通常包括直线性和等百分比特性,直线性表示阀门的流量随着执行机构的位移成线性变化;等百分比特性表示阀门的流量随着执行机构的位移成百分比变化。
4. 控制范围:气动阀门的控制范围是指阀门在使用过程中的操作范围,包括最小控制范围和最大控制范围。
5. 材料选型:气动阀门的材料选型非常重要,通常需要考虑介质的种类、温度、压力等因素来选择合适的阀门材料。
6. 温度范围:气动阀门的工作温度范围是指阀门能够稳定可靠地运行的温度范围,需要根据具体的工况来选择合适的阀门型号和材料。
7. 控制精度:气动阀门的控制精度是指阀门在控制介质流量或压力时的精确程度,通常使用百分比或者具体数值来表示。
三、气动阀门参数的影响因素1. 介质特性:不同的介质对气动阀门的要求也有所不同,包括介质的流动性、腐蚀性、温度、压力等因素。
2. 工况条件:工况条件包括气动阀门的使用环境、工作压力、温度、介质粘度等对阀门参数的选择和影响。
3. 控制要求:对于不同的控制要求,需要选择不同参数的气动阀门,例如对流量、压力、温度等控制要求不同。
民用飞机纵向气动参数辨识

适当的俯仰力矩系数可以保证飞机的稳定性,但过大的俯仰力矩系数可能导致飞机出现低头或抬头现象,影响飞 行安全。
04
纵向气动参数辨识的挑战与解 决方案
数据处理与噪声抑制
数据预处理
对原始数据进行滤波、去噪等处理, 以提高数据质量。
噪声抑制
采用统计方法、滤波器等手段对噪声 进行抑制,降低其对参数辨识的影响 。
05
案例分析
某型民用飞机风洞试验数据辨识案例
总结词
风洞试验数据辨识
详细描述
通过风洞试验获取某型民用飞机的飞行数据 ,利用数值模拟和优化算法对数据进行处理 和分析,辨识出飞机的纵向气动参数,如升 力系数、阻力系数和俯仰力矩系数等。
某型民用飞机飞行数据反演案例
总结词
飞行数据反演
详细描述
基于某型民用飞机的实际飞行数据,利用反演算法和优化技术,反演出飞机的纵向气动 参数,如升降舵偏角、平尾偏角和重心位置等。
02
研究表明,气动参数的辨识精度对飞行控制系统的 性能和飞行安全具有重要影响。
03
本文所采用的方法可为其他类似研究提供参考和借 鉴。
研究展望
未来研究可进一步探讨气动参 数辨识的精度和稳定性问题, 以提高飞行控制系统的性能和
可靠性。
可以进一步研究不同飞行条件 和不同飞机模型下的气动参数 变化规律,为飞行控制系统设 计和优化提供更全面的数据支
持。
可以结合先进的传感器技术和 数据处理方法,开发更为高效 和准确的气动参数辨识方法, 提高辨识精度和效率。
可以考虑将气动参数辨识与飞 行控制系统设计、优化和控制 等多方面进行更紧密的结合, 以实现更为智能和高效的飞行 控制。
THANKS
导弹气动参数辨识及控制研究
导弹气动参数辨识及控制研究引言在现代军事技术领域中,导弹的研发与制造已经成为了一项重要的任务。
为了保证导弹的性能和效率,研究人员需要对导弹的气动参数进行辨识和控制。
这不仅有利于提高导弹的命中精度,还能够确保导弹在复杂环境中的稳定性和可靠性。
一、导弹气动参数的辨识当导弹在高速运动时,会受到外界风力和空气动力的影响。
这些影响会导致导弹的运动轨迹产生变化,从而影响导弹的命中精度和稳定性。
因此,研究人员需要对导弹的气动参数进行辨识,以确定导弹运动过程中的相应变化。
气动参数可以分为两类:几何参数和流场参数。
几何参数包括导弹的尺寸、形状和重量等,这些参数一般是固定不变的。
而流场参数则包括风力、气压、温度和湍流等,这些参数随着时间和空间的变化而变化。
因此,研究人员需要对导弹在运动过程中受到的外界因素进行实时监测,并对其进行数据分析和处理,以便确定导弹的气动参数。
导弹的气动参数可以通过多种方法进行辨识,例如数值模型、实验测试和系统辨识等。
其中,数值模型是最为常用的一种方法。
该方法通过建立数学模型,对导弹运动过程中的气动参数进行模拟和计算,以便确定导弹的运动状态和轨迹。
二、导弹气动参数的控制正确辨识导弹的气动参数后,下一步就是对其进行控制。
导弹的控制一般可以分为两类:主动控制和被动控制。
主动控制是指在导弹运行过程中,通过操纵导弹的控制装置,使其向预定目标方向运动。
而被动控制则是指在导弹运行过程中,通过改变导弹重心位置和外形设计,使其自动调整运动状态。
在导弹的控制过程中,控制系统的设计和优化非常关键。
一般来说,导弹的控制系统应具备高稳定性、高精度、高可靠性和高适应性等特点。
此外,还需要考虑导弹在复杂环境中的作战需求和实际使用情况,以确保导弹能够在各种条件下良好运行。
结论随着现代科技的不断进步,导弹气动参数辨识和控制技术也在不断提升。
正确辨识导弹的气动参数和合理控制导弹的运动状态,能够有效提高导弹的命中精度和稳定性,确保导弹的作战效率和战场安全性。
气动参数cps cpt
气动参数cps cptCPS和CPT是气动参数中常见的两个指标,分别代表着Cycles per Second(每秒周期数)和Cycles per Time(每个时间周期数)。
它们在气动工程中具有重要的意义,对于飞行器的设计和性能评估起着关键作用。
CPS是指单位时间内某一气动现象的周期数。
在飞行器设计中,CPS 常用于描述空气动力学现象的频率,如机翼的气动弹性振动频率、发动机的压气机叶片转速等。
CPS的数值越大,表示单位时间内气动现象发生的次数越多,相应的气动载荷也会增加。
因此,在设计飞行器时,需要根据CPS的要求来确定结构强度,以保证飞行器在各种工况下都能够安全运行。
CPT是指单位时间内某一气动现象的周期数。
与CPS不同的是,CPT 主要用于描述气动现象随时间的变化规律。
在飞行器的控制系统设计中,CPT常用于描述控制信号的刷新率,即控制系统每秒钟更新控制指令的次数。
较高的CPT可以使飞行器的控制系统更加灵敏,能够更及时地响应外界干扰,提高飞行器的操控性能。
在实际的气动工程应用中,CPS和CPT的数值往往需要根据具体的工程要求进行调整。
对于飞行器的结构设计来说,需要根据所需的飞行速度、高度和负载等因素来确定CPS的要求。
而对于飞行器的控制系统设计来说,需要根据所需的控制精度和响应速度等因素来确定CPT的要求。
在提高CPS和CPT的数值时,需要考虑到气动现象的特性和限制。
例如,在增大CPS时,需要注意避免产生过大的气动载荷,以免对飞行器的结构造成损伤。
在提高CPT时,需要考虑到控制系统的计算能力和数据传输速度等因素,以确保能够及时更新控制指令。
除了CPS和CPT,还有其他一些与气动参数相关的指标也具有重要的意义。
例如,气动力和气动稳定性是衡量飞行器气动性能的重要指标,可以通过计算流体力学模拟和风洞实验等手段进行评估。
另外,气动噪声也是一个重要的气动参数,对于提高飞行器的乘坐舒适性和减少对环境的影响具有重要作用。
常见飞行器气动参数或气动模型
常见飞行器气动参数或气动模型一、气动参数的概念气动参数是指影响飞行器运动和性能的一系列气动特性和参数。
它们是飞行器设计和性能评估的基础,对于飞行器的飞行稳定性、操纵性、推进性能等方面起着至关重要的作用。
二、常见气动参数1. 升力系数(Cl):升力系数是指飞行器升力与动压和参考面积之比。
它是衡量飞行器升力产生能力的重要参数,能够反映飞行器的升力性能和操纵性能。
2. 阻力系数(Cd):阻力系数是指飞行器阻力与动压和参考面积之比。
它是衡量飞行器阻力产生能力的重要参数,能够反映飞行器的阻力性能和耗能情况。
3. 抗力系数(Cm):抗力系数是指飞行器的阻力矩与动压、参考面积和参考长度之比。
它是衡量飞行器阻力矩产生能力的重要参数,能够反映飞行器的稳定性和操纵性。
4. 滚转力矩系数(Clp):滚转力矩系数是指飞行器滚转力矩与动压、参考面积和参考长度之比。
它是衡量飞行器滚转稳定性的重要参数,能够反映飞行器的操纵性和操纵稳定性。
5. 俯仰力矩系数(Cmq):俯仰力矩系数是指飞行器俯仰力矩与动压、参考面积和参考长度之比。
它是衡量飞行器俯仰稳定性的重要参数,能够反映飞行器的姿态控制性能和操纵性。
6. 偏航力矩系数(Cnr):偏航力矩系数是指飞行器偏航力矩与动压、参考面积和参考长度之比。
它是衡量飞行器偏航稳定性的重要参数,能够反映飞行器的操纵性和耗能情况。
7. 侧滑力矩系数(Clr):侧滑力矩系数是指飞行器侧滑力矩与动压、参考面积和参考长度之比。
它是衡量飞行器侧滑稳定性的重要参数,能够反映飞行器的操纵性和姿态控制性能。
8. 马赫数(M):马赫数是指飞行器速度与声速之比。
它是衡量飞行器飞行速度的重要参数,能够反映飞行器的超音速飞行能力和空气动力学性能。
9. 攻角(α):攻角是指飞行器速度矢量与飞行器参考面法线之间的夹角。
它是衡量飞行器相对于气流流向的角度,能够反映飞行器的升力和阻力产生情况。
10. 侧滑角(β):侧滑角是指飞行器速度矢量与飞行器参考面侧向之间的夹角。
气动资料第二章
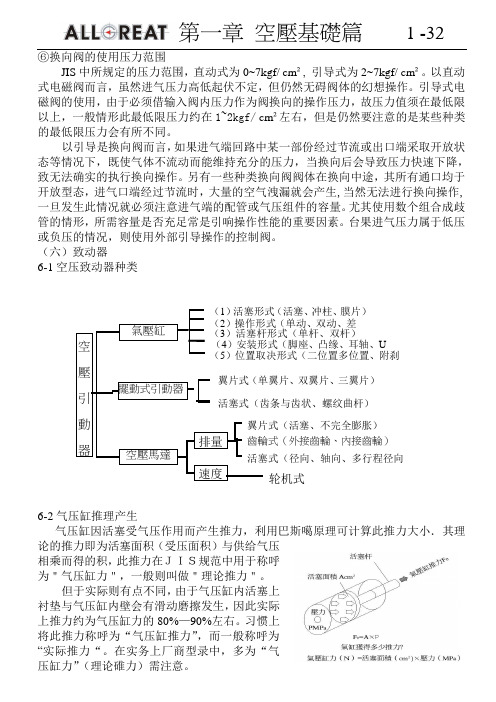
⑥换向阀的使用压力范围JIS中所规定的压力范围,直动式为0~7kgf/ cm², 引导式为2~7kgf/ cm²。
以直动式电磁阀而言,虽然进气压力高低起伏不定,但仍然无碍阀体的幻想操作。
引导式电磁阀的使用,由于必须借输入阀内压力作为阀换向的操作压力,故压力值须在最低限以上,一般情形此最低限压力约在1~2kgf/ cm²左右,但是仍然要注意的是某些种类的最低限压力会有所不同。
以引导是换向阀而言,如果进气端回路中某一部份经过节流或出口端采取开放状态等情况下,既使气体不流动而能维持充分的压力,当换向后会导致压力快速下降,致无法确实的执行换向操作。
另有一些种类换向阀阀体在换向中途,其所有通口均于开放型态,进气口端经过节流时,大量的空气洩漏就会产生,当然无法进行换向操作,一旦发生此情况就必须注意进气端的配管或气压组件的容量。
尤其使用数个组合成歧管的情形,所需容量是否充足常是引响操作性能的重要因素。
台果进气压力属于低压或负压的情况,则使用外部引导操作的控制阀。
(六)致动器6-1空压致动器种类6-2气压缸推理产生气压缸因活塞受气压作用而产生推力,利用巴斯噶原理可计算此推力大小.其理论的推力即为活塞面积(受压面积)与供给气压相乘而得的积,此推力在JIS规范中用于称呼为"气压缸力",一般则叫做"理论推力"。
但于实际则有点不同,由于气压缸内活塞上衬垫与气压缸内壁会有滑动磨擦发生,因此实际上推力约为气压缸力的80%—90%左右。
习惯上将此推力称呼为“气压缸推力”,而一般称呼为“实际推力“。
在实务上厂商型录中,多为“气压缸力”(理论碓力)需注意。
空壓引動器氣壓缸擺動式引動器空壓馬達速度排量(3)活塞杆形式(单杆、双杆)(2)操作形式(单动、双动、差(4)安装形式(脚座、凸缘、耳轴、U(1)活塞形式(活塞、冲柱、膜片)(5)位置取决形式(二位置多位置、附刹翼片式(单翼片、双翼片、三翼片)活塞式(齿条与齿状、螺纹曲杆)轮机式翼片式(活塞、不完全膨胀)齒輪式(外接齒輪、內接齒輪)活塞式(径向、轴向、多行程径向6-3气压缸的换向就最常见的复动气压缸来说,其作动是来自缸体的活塞杆这一边气室的气压供给,在由其反侧将气压排出。
跨声速气动参数在线辨识方法研究
vx v y wz 式中
= - w z v y + g( n x - sin) = w z v x + g( n y - cos) = wz = C m q ∞ Sl Iz 1 [ Tcos T - q ∞ SC A] mg ( 2)
{
nx =
1 ny = [ Tsin T + q ∞ SC N] mg
[8 ]
[ x(βt) ] [ ] ]
系统状态方程和测量方程可以改写为 ( t) x x a ( t ) = f( x a ( t ) , u( t) ) + Γa ( t) wa ( t) = β f( x( t) , u( t) , β) Γ( t) 0 w( t) = + 0 0 0 0 z( t) = h( x ( t) , u( t) ) + v( t) a
再入飞行器在再入过程中, 从超声速过渡到亚 声速飞行必须经过跨声速区, 研究跨声速区的气动 对于再入体跨声速区弹道控制有着重 力建模技术, 要的现实意义和广阔的应用前景 。再入体在跨声速 区飞行过程中, 气动参数随马赫数变化剧烈, 呈鼓包 状突起
[1 ]
,
常见的在线气动参数辨识方法有递推最小二乘法 、 递推极大似然法、 卡尔曼滤波等, 其中应用最为广泛 的是卡尔曼滤波方法。将传统的增广扩展卡尔曼滤 波( AEKF: augment extended kalman filter ) 应用于上 述跨声速区气动力模型的在线气动参数辨识中 , 发
( 1)
w( t) w T ( τ) ] = Q( t) δ ( t - τ) E[ E[ v( t) v T ( t) ] = R( t) δ kj 若将非线性系统参数 β 扩展为状态矢量, 则增广后 的状态矢量为 x a ( t) =
气动参数识别资料课件

控制理论为气动参数识别提供了新的视角和方法,例如通过反馈控 制系统实现对模型预测的实时调整和优化。
信号处理
信号处理技术可以用于提取和优化气动参数识别中的特征,提高模 型的分类准确率。
数据驱动与人工智能的挑战
01
数据质量
在气动参数识别中,数据的质量对模型的性能有着至关重要的影响,因
此如何获取高质量的数据是一大挑战。
多元线性回归模型
多元线性回归模型是在线性回归模型的基础上,增加多个自变量,以考虑更复 杂的气动参数与影响因素之间的关系。该模型可用于分析多个因素对气动参数 的影响。
非线性模型
支持向量机模型
支持向量机(SVM)是一种有效的分类和回归分析方法。在气动参数识别中,SVM可用于建立非线性模型,解决线 性模型无法处理的复杂关系。通过选择适当的核函数,SVM能够适应各种非线性情况。
重要性
气动参数识别在航空、航天、航 海、汽车等领域具有重要的应用 价值,是设计、优化和控制相关 系统的关键技术之一。
气动参数识别的基本原理
基于实验数据
通过实验获取与气动参数相关的 数据,如风洞实验、飞行试验等
。
建立数学模型
根据流体动力学理论和实际系统特 点,建立能够描述气动参数与实验 数据之间关系的数学模型。
计划
设计不同的气动实验,收集数据,通 过识别算法对数据进行处理和分析, 对比不同实验条件下的结果,得出结 论。
实验设备与布置
设备
气动实验台、压力传感器、温度传感器、流量传感器、数据采集器等。
布置
在气动实验台上安装压力、温度和流量等传感器,将数据采集器与计算机相连, 以便能够实时采集和记录数据。
数据采集与处理
神经网络模型
四旋翼飞行器模型的气动参数辨识_赵述龙
2
2. 1
模型建立
实验装置
4 个电机在气 由于四旋翼机构的高度对称性, 动参数和其他性能方面的差异很小, 可以认为近似 相等, 所以在合理分析其中一个电机之后就可以类 推出其余电机的性能参数。 为了得到准确的旋翼 气动参数, 专门搭建了单自由度四旋翼飞行平台, 如图 1 所示。
图 1 单自由度四旋翼飞行平台 Fig. 1 The rotor flying platform with single freedom degree
平台将 2 个旋翼装在十字形机体的一条轴线 , 底座采用单自由度轴承连接, 上 轴线固定于底座, 限制平台只能沿滚转方向转动。改变旋翼的转速, 就会使得机构产生转动。 在 2 个旋翼转速相等的 时候保持水平平衡状态。 测试平台由 5 部分组成, 包括控制器和电机驱 电源模块、 惯性测量单元( IMU ) 、 无线遥控 动模块、 设 备 和 平 台 机 构。 控 制 器 核 心 处 理 器 为 TMS320F28335 , 工作频率为 150 MHz; 电机为 Aircraft 模型电机, 塑料旋翼以及减速齿轮装置; 电源 12 V 为 锂 电 池; IMU 为 Xsens 公 司 的 MTi28A53G35 , 它具有 3D 积分加速度计, 可以实时的 输出姿态角及其角速度信息; 遥控器为 6 通道 WLFY 模型飞机遥控器。 平台总重约 1 kg, 轴线长度 最大为 62 cm。 2. 2 系统建模 建立旋翼飞行器精确数学模型的关键在于旋 翼空气动力学模型的分析。 只分析旋翼轴向和周 忽略径向气流的影响。 由叶 围气流对旋翼的影响, [ 8] 素理论可知 : 1 2 2 ( 1) T = ρπ r2 m CT rm Ω 2 1 2 2 ( 2) D = ρπ r2 m CD rm Ω 2 1 2 2 ( 3) L = ρπ r2 m CL rm Ω 2 D、 L 分别表示旋翼产生的升力、 式中: T、 阻力和侧 CD 、 C L 分别表示旋翼的升力系数, 倾力; C T 、 阻力系 数和侧倾力系数。 由此可见, 求解旋翼推力或者力 矩的关键在于各项空气动力学系数的求解。 而这些 、 系数与旋翼的几何特性 相对气流以及飞行状态有 关, 在忽略微小变化, 以及在一段时间之内取平均 [ 910] , 值的时候, 可以认为这些系数是恒定值 传统 方法利用这些几何参数进行复杂计算或者相关的 经验值得到系数当量, 其结果并不完全准确, 而且 随着环境条件的变化差异很大。 地面坐标系与机体坐标系的定义如图 2 所示, 3号 只有 1 号和 3 号旋翼工作, 规定 1 号旋翼下降, 。 旋翼上升为机体转动的正方向 机体固连于地面, 机构只有滚动自由度, 其余都假设限制不动。 机体 x b 轴垂 坐标系选取十字结构的交叉点为坐标原点, y b 轴平行于旋转轴, z b 轴方向向上。 直于旋转轴,
气动系统基础资料

QG
A、B、C、D、H
缸径 ×行程
二、几种特殊气缸简介
薄膜气缸 diaphragm cylinder
1-缸盖 2-膜片 3-膜盘 4-弹簧 5-缸体 6-活塞杆 7-呼吸孔
工作时,膜片在压缩空气作用下推动活塞杆运动。 它的优点是:结构简单、紧凑、体积小、重量轻;密封性好,不易漏气;加工简单,成本低,无磨损件,维护修方便等。适用于行程短的场合。 缺点是:行程短,一般不超过50mm。平膜片的行程更短,约为其直径的1/10。
03
辅助元件 是保证压缩空气的净化、元件的润滑、元件间的连接及消声等所必须的,它包括过滤器、油雾器、管接头及消声器等。
04
气源装置
”
气源装置为气动系统提供满足一定质量要求的压缩空气,是气动系统的重要组成部分。
气动系统对压缩空气的主要要求:具有一定压力和流量,并具有一定的净化程度。
气源装置由以下四部分组成
气压传动
点击此处添加正文,文字是您思想的提炼,请尽量言简意赅的阐述观点。
空气的物理性质
马赫数及其作用
气体的流动规律
气源装置
气动辅件
气动执行元件
气动控制阀
气源装置及气动元件
空气的物理性质
空气的密度ρ 空气的粘度 粘性:空气流动时质点间相对运动产生内摩擦阻力的性质 动力粘度μ 运动粘度ν 影响粘度的因素 温度 随温度的升高而升高。 空气的压缩性和膨胀性 体积随压力和温度而变化的性质分别表征为压缩性和膨胀性。 空气的压缩性和膨胀性远大于固体和液体的压缩性和膨胀性。
管道系统和气动三大件
压力控制阀
压力控制阀的功能:控制系统中压缩空气的压力,以满足系统对不同压力的需要 压力控制阀的工作原理:均是利用空气压力和弹簧力相平衡的原理来工作的 压力控制阀的分类: 减压阀、定值器:降压稳压作用 安全阀、限压切断阀:限压安全保护作用 顺序阀、平衡阀:根据气路压力不同进行某种控制
导弹气动参数辨识与优化输入设计_汪清
3. 2 飞行试验数据及攻角估计 在样例导弹飞行试验中 , 根据气动参数辨识的 需求 , 在考核项目完成后的末段弹道安排了本文所 设计的输入激励信号 , 获得了可用于气动参数辨识 的光测 、 遥测和气象数据 。 由于攻角和侧滑角是导弹气动参数辨识所需的 重要参数 , 而飞行试验没有进行测量 。 为此 , 本文首 先采用弹道重建方法 给出整个再入过程的弹道参 数 , 然后利用几何关系法计算攻角和侧滑角
N i =1
( t) ν( t) ∑ν
T i i
( 5)
收稿日期 : 2007 -06 -15 ; 修回日期 : 2007 -12 -21
790
宇航学报
第 29 卷
气动参数辨识问题就是寻求待辨识参数 θ 的估 计值 θ, 使判据函数 J ( θ )达最小值 , 即 θ= ARG minJ ( θ ) θ ∈Θ 其迭代修正公式为 : Δ θ= M 式中 M = J θ k θ l
N
( 2)
式中 , ε ( t i) 为观测噪声 , 服从高斯分布且均值为零 。
J( θ )=
i =1
[ ν( t) R ∑
i
T
1
ν ( ti )+ln |R | ] ( 3) ( 4)
式中 , ν ( i)为输出误差 : ν ( t i )= y m ( ti )- h[ x ( t i) , u( ti ) ,θ ; ti ] ym ( i)为观测量的实测值 。R 为观测噪声的协方差 矩阵 , 当观测噪声的统计特性未知时 , 采用 R 的最 优估计 : 1 R =N
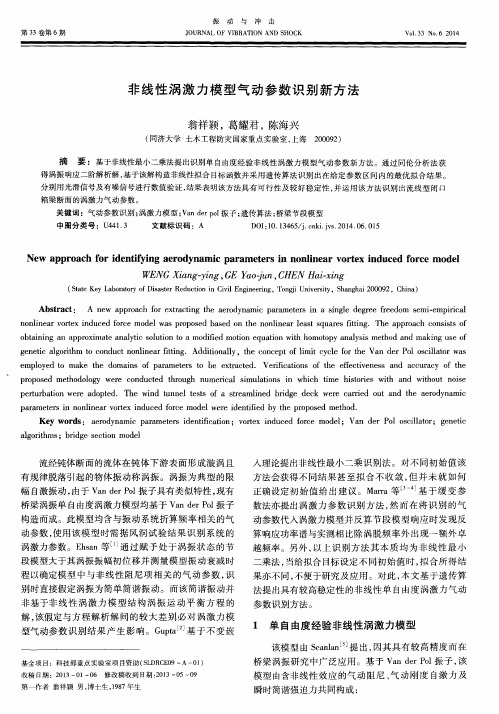
图 1 准偶极 方波输入信号 Fig . 1 Input signal of quasi-doublet
参数辨识要求参数估计的数学期望与真值的偏 差尽可能小 , 协方差也尽可能小 。 对于最大似然估 计 , 本身是无偏估计器 , 优化输入设计就是要求设计
非线性涡激力模型气动参数识别新方法
箱梁断面的涡激力气动参数 。 关键 词 :气动参数识别 ; 涡激力模型 ; V a n d e r p o l 振子 ; 遗传算法 ; 桥梁节段模型
g e n e t i c a l g o i r t h m t o c o n d u c t n o n l i n e a r i f t t i n g . Ad d i t i o n a l l y ,t h e c o n c e p t o f l i mi t c y c l e or f t h e Va n d e r P o l o s c i l l a t o r wa s e mp l o y e d t o ma k e t h e d o ma i n s o f p a r a me t e r s t o b e e x t r a c t e d . Ve r i i f c a t i o n s o f t h e e f f e c t i v e n e s s a n d a c c u r a c y o f t h e p r o p o s e d me t h o d o l o g y we r e c o n d u c t e d t h r o u g h n u me i r c a l s i mu l a t i o n s i n wh i c h t i me h i s t o ie r s w i t h a n d wi t h o u t n o i s e p e r t u r b a t i o n w e r e a d o p t e d .T h e wi n d t u n n e l t e s t s o f a s t r e a ml i n e d b r i d g e d e c k we r e c a r r i e d o u t a n d t h e a e r o d y n a mi c p a r a me t e r s i n n o n l i n e a r v o te r x i n d u c e d f o r c e mo d e l we r e i d e n t i i f e d b y t h e p r o p o s e d me t h o d .
民用飞机纵向气动参数辨识

民用飞机纵向气动参数辨识汇报人:2023-12-15•引言•纵向气动参数辨识方法•纵向气动参数对飞行性能的影响目录•纵向气动参数辨识的挑战与解决方案•案例分析:某型民用飞机纵向气动参数辨识•结论与展望目录01引言通过辨识民用飞机纵向气动参数,提高飞行器的性能和稳定性。
目的随着航空技术的不断发展,对飞行器的气动性能要求越来越高,气动参数辨识成为研究热点。
背景目的和背景准确的气动参数辨识有助于优化飞行器的设计和控制,提高其性能和稳定性。
提高飞行器性能降低能耗增强安全性通过辨识气动参数,可以优化飞行器的气动外形和飞行姿态,降低能耗和排放。
准确的气动参数辨识有助于提高飞行器的安全性和可靠性,减少事故风险。
030201气动参数辨识的意义国内在气动参数辨识方面取得了一定的进展,但仍存在一些挑战和问题需要解决。
国外在气动参数辨识方面已经取得了一定的成果,但仍存在一些问题和挑战需要进一步研究和探索。
国内外研究现状国外研究现状国内研究现状02纵向气动参数辨识方法根据飞机模型和目标飞行状态,制定详细的飞行试验方案,包括试验点选择、数据采集方式等。
试验设计在真实的飞行环境中,对飞机进行测试,获取纵向气动参数的数据。
飞行测试对采集到的数据进行处理和分析,提取出纵向气动参数。
数据处理基于飞行试验的方法03参数识别通过比较模拟计算结果与实际飞行数据,识别出最佳的纵向气动参数。
01建立模型利用CFD(Computational Fluid Dynamics)等技术,建立飞机的数值模型。
02模拟计算在数值模型中输入不同的纵向气动参数,通过模拟计算得到相应的飞行状态。
基于数值模拟的方法根据已有的飞机模型和气动数据,建立纵向气动参数的数学模型。
建立模型利用实际飞行数据对数学模型进行修正,以减小模型预测误差。
模型修正利用修正后的模型,估计出最佳的纵向气动参数。
参数估计基于模型修正的方法03纵向气动参数对飞行性能的影响1 2 3升力系数随着飞行高度的增加而减小,随着飞行速度的增加而增大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2)涡振参数
U pv
f pd p Sp
f pd p Sm
(3)尾流卓越频率
模型不同风速下实测尾流卓越频率 fp
同济大学土木工程防灾国家重点实验室
4. 非定常气动参数识别
4.1 模型要求
(1) 刚性—无挠曲变形 (2) 振动—质量、刚度、频率 (3) 外形—按比例缩尺
4.2 识别方法
(1) 自由振动测振法 (2) 强迫振动测振法 (3) 自由振动测压法 (4) 强迫振动测压法
要求: 高灵敏度 大刚度 稳定性 非耦合
同济大学土木工程防灾国家重点实验室
2.2 测力模型
(1) 轻质—惯性力小、频率高 (2) 刚性—无变形、频率高 (3) 外型—按比例缩尺、相似
2.3 三分力系数(定常气动力系数3个)
CL
1
FLU 2B2来自— 升力系数CD
1
FD
U 2H
2
— 阻力系数
CM
MP
1 U 2B2
m 0
[M s ] 0
I
m
;
[Cs
]
2mhh 0 2Im
0
;
[Ks ] 0mIh2m20
{Ft(t)}
L f M
f
Lf
U
2 B[K1H1*
h U
K
2
H
* 2
B U
K
2 2
H
3*
K12
H
* 4
h] B
Mf
U
2 B2[K1 A1*
h U
K2
A2*
B U
K
2 2
A3*
K12
A4*
h] B
2. 定常三分力系数识别
2.1 测力天平
FL
M
Y
F
F D
S
M
P
MR
UL B
图3. 测力天平
FL — 升力(Lift force) FD — 阻力(Drag force) FS — 侧向力 (Side force) MP — 竖向弯矩 (Pitching moment) MR — 扭矩 (Rolling moment) MY — 侧向弯矩 (Yawing moment)
建筑结构
天平测力试验 (Force balance test) 表面测压试验 (Cladding load test) 气弹模型试验 (Aeroelastic model test)
节段模型试验 (Sectional model test) 桥梁结构 拉条模型试验 (Taut strip model test)
同济大学土木工程防灾国家重点实验室、桥梁工程系
桥梁抗风设计
第六讲
气动参数识别
主讲教师:杨詠昕 教授.副研究员
同济大学土木工程防灾国家重点实验室
1、风洞试验简介 2、定常三分力系数识别 3、准定常气动参数识别 4、非定常气动参数识别 5、气动导纳识别
同济大学土木工程防灾国家重点实验室
1. 风洞试验简介
dCL d
CL
— 升力系数关于攻角的导数
CD'
dCD d
CD
— 阻力系数关于攻角的导数
CM'
dCM d
CM
— 升力矩系数关于攻角的导数
注意:△α的单位为弧度(arc)
同济大学土木工程防灾国家重点实验室
3.3 Strouhal数
(1)定义
St
fd U
f — 振动频率;d —直径或宽度;U —风速
(2)简化的周边环境模型 • 刚度很大、外形相似
(3)粗略的上游地表模型 • 用统一的或几种粗糙元模拟
同济大学土木工程防灾国家重点实验室
1.3 风洞试验分类
风环境
高空或行人风环境 (Pedestrian level test) 建筑物周边风环境 (Topographical model test) 环境空气动力学试验 (Environment aerodynamics)
同济大学土木工程防灾国家重点实验室
3.准定常气动参数识别
3.1 准定常假定
任意时刻的气动力仅仅与结构当前时刻 的姿态有关, 而与以前时刻的姿态无关
动压: Q (U u dp )2
2
dt
参数:
Cj
C j ( )
dC j
d
rel
有效攻角:
rel
h U
nB w
u p
h
nB
U
w
n—表示气动升力作用位置,机翼n=0.75
1.1 基本原理
(1)风速及其风向分布模拟 • 良态气候模式 • 飓风气候模式
(2)结构物风效应模拟 • 刚性结构—无振动响应 • 半刚性结构—仅有强迫振动 • 柔性结构—气流与结构相互作用
同济大学土木工程防灾国家重点实验室
1.2 试验模型
(1)精确的结构物模型 • 适当的比例、刚度、质量和外观
— 升力矩系数
2
通常是在均匀流场中进行的
同济大学土木工程防灾国家重点实验室
2.4 系数识别
• 模型姿态
风攻角:-12° +12° 风偏角:模拟比较困难
• 试验风速
气动力数值与天平测量精度
例如: 天平量程10kg,精度+1%
气动力≥100g
• 数据采样
Fx
1 n
n
Fx (ti )
i 1
— 样本均值
同济大学土木工程防灾国家重点实验室
3.2 准定常气动力
(1)运动相关力 (自激力)
FLf
U 2B 2
{CL'
[2CL
p
CL' (h
nB)]/U}
FDf
U 2B 2
{CD'
[2CD
p
CD'
(h
nB)]
/U}
Mf
U 2B2 2
{CM'
[2CM
p
CM'
(h
nB)]/U}
(2) 准定常参数(6个)
CL'
气弹模型试验 (Aeroelastic model test)
同济大学土木工程防灾国家重点实验室
1.4 主要试验设备
(1)皮托管测压—平均风速
P st a t i c
P total
Pt
Ps
Pd
P0
1 2
aU
2
Pd
Pt
Ps
1 2
aU 2
w gh
P dyn
U
2g
w a
h
w
图1. 皮托管测压
基本假定:
竖向运动时第一阶模态为主,第二阶模态可忽略 扭转运动时第二阶模态为主,第一阶模态可忽略
同济大学土木工程防灾国家重点实验室
同济大学土木工程防灾国家重点实验室
4.3 自由振动试验系统
传感器 2 节段模型
传感器 1 来流 U
端杆
端杆
来流 U 传感器 1
长钢丝 弹簧 传感器 3 长钢丝 节段模型 风洞洞壁
传感器 2
同济大学土木工程防灾国家重点实验室
4.4 识别原理
振动方程:
[M s ]{y(t)} [Cs ]{y(t)} [Ks ]{y(t)} {Ff (t)}
同济大学土木工程防灾国家重点实验室
1.4 主要试验设备 (续)
(2) 热线风速仪—脉动风速
U
静力:W H
W I 2Rw, H A1 B1 U Tw Te
动力:CW dTw / dt W H
图2. 热线风速仪
➢ 热线(膜)在气流流过时由于散热量 增加而降温从而导致电阻变化
同济大学土木工程防灾国家重点实验室