第二章 船舶定位剖析
海上测绘中的船舶定位和气象影响分析
海上测绘中的船舶定位和气象影响分析近年来,随着航海技术的不断发展和国际贸易的繁荣,海上测绘变得日益重要。
无论是海底地形的测量还是海洋资源的探索,船舶定位是其中至关重要的一环。
同时,气象因素也对海上测绘的工作产生着重要影响。
本文将探讨海上测绘中的船舶定位和气象影响分析。
一、船舶定位的方法和技术船舶定位是船舶导航、航行和测绘工作的基础。
目前,常见的船舶定位方法主要包括全球卫星导航系统(GNSS)、惯性导航系统(INS)和无线电技术等。
全球卫星导航系统广泛应用于船舶定位中。
其中,全球定位系统(GPS)是最为常见的一种卫星导航系统。
通过接收来自卫星的信号,可以精确定位船舶的经纬度坐标,以实现准确的导航和测量。
惯性导航系统则通过测量物体的加速度和角速度来推断位置、姿态和速度等。
利用MEMS(微机电系统)的技术,惯性导航系统可以实现更小、更轻、更精确的测量。
此外,无线电技术也被广泛运用于船舶定位中。
利用无线电信号传输的特点,可以实现通过测量信号传输时间差来确定位置的方法,如超宽带定位等。
二、气象对船舶测绘工作的影响在海上测绘工作中,气象因素对船舶的航行、保障和测绘活动都起到着至关重要的作用。
以下将重点探讨气象对船舶测绘工作的三个方面影响。
首先是气象对航行的影响。
糟糕的天气条件,如强风、大雨、大雪等,会对船舶的航行造成很大影响。
海上测绘需要船舶能够稳定地保持航向和航速,而恶劣的天气会造成航船的偏移和晃动,从而影响测绘结果的准确性。
其次是气象对保障的影响。
海上测绘需要船舶的保障工作来确保测量设备和人员的安全,而恶劣的气候条件会增加保障工作的困难。
例如,在暴风雨中,船舶保障工作可能受到严重威胁,需要采取额外的保护措施来保障工作的进行。
最后是气象对测绘活动本身的影响。
气象因素,如海浪、风速等,会直接影响到测绘设备的运行和测量结果的精确性。
在海浪较大的情况下,船舶的晃动会干扰测量设备的工作,从而影响到测绘结果的可靠性。
航海学 第二章 第1节 航向、方位和舷角

பைடு நூலகம்
M
航向、方位和舷角关系
计算公式:
NT M' Q左 TC TB Q右 BL M CL
TB=TC+Q
或
Q右为+ TB TC Q Q左为-
例题1
(END)
航向、方位和舷角关系
符号法则:
CL NT TB Q BL M
如:TB>360°, 则:TB′= TB - 360º
TC
航向、方位和舷角关系
符号法则:
M NT CL Q左 TC BL 如:TB>360° 则:TB′= TB - 360º
如:TB<0° 则:TB′= TB + 360º
(END)
TB
思考练习
1、真航向是: A、船舶航行的方向 B、船首尾线的方向 C、船首向 D、船舶航行时真北至船首向的夹角 2、舷角是: A、船首线至方位线的夹角 B、物标的方向 C、真航向减去真方位 D、船舶海上看物标的方向 3、我船航向180°,某船位于我船右舷30°,若该船航向为 350°, 则我船位于该船舷角: A、40°右 B、30°右 C、150°右 D、150°左 4、某船真航向060°,该船左正横某物标的真方位为: A、150° B、330° C、090° D、060° 5、某船真航向060°,该船右舷30°某物标的真方位为: A、30° B、90° C、030° D、090° 6、某船真航向040°,测得某物标的真方位为320°,则该物标的 相对方位(舷角)为: A、80° B、080° C、280° D、310°
第一节 航向、方位和舷角
广州航海学院
CAPT.L
航向、方位和舷角
依据基准北所确 定的船舶的航向 和物标的方位, 统称向位。
船舶行业的船舶定位和导航系统

船舶行业的船舶定位和导航系统船舶定位和导航系统是船舶行业中至关重要的技术装置,它们通过准确的定位和高效的导航功能,为船舶提供安全、稳定的航行环境。
本文将从船舶定位和导航系统的基本原理、技术应用和未来发展趋势等方面进行探讨。
一、船舶定位和导航系统的基本原理船舶定位和导航系统通常由GPS(Global Positioning System)卫星定位系统、GNSS(Global Navigation Satellite System)全球导航卫星系统、惯性导航仪等组成。
其中,GPS卫星定位系统是最为常见和普遍应用的定位系统之一。
它利用卫星发射的信号与船舶上的接收器进行通信,通过计算信号的传播时间差以及卫星的位置信息,确定船舶的准确位置。
二、船舶定位和导航系统的技术应用1. 航行安全:船舶定位和导航系统能够通过精准的定位信息,帮助船舶船员了解当前的船位、船速、航向等参数,从而及时避免遭遇浅滩、礁石等障碍物,确保船舶正常航行并降低事故风险。
2. 船队管理:船舶定位和导航系统不仅可以实时获取单艘船舶的位置信息,还可以将船队中的船舶位置信息进行整合和管理,从而帮助船队管理者掌握整个船队的运行情况,合理调度船舶,提高船队的运行效率。
3. 航线规划:船舶定位和导航系统能够根据预设的航线,提供最佳的航行路径选择。
系统通过综合考虑船舶的当前位置、目的地、环境因素等,并结合导航图纸,为船舶提供航线规划,实现最短航程、最安全的航行路径。
4. 环境监测:船舶定位和导航系统还可以配合其他设备,对海洋环境进行实时监测和分析。
例如,利用系统中的气象传感器、海洋生物传感器等,可以获取并分析当前海洋气象、潮汐、水文等信息,提前预知海洋环境变化,为船舶航行提供准确的环境保障。
三、船舶定位和导航系统的发展趋势随着科技的不断进步和船舶行业的发展需求,船舶定位和导航系统正朝着以下方面发展:1. 卫星定位精度提升:通过增加卫星数量、提高接收器灵敏度等手段,提高卫星定位系统的定位精度,增加船舶位置信息的准确性,提高航行安全性。
海运船舶的导航与定位技术

海运船舶的导航与定位技术导言:海运船舶作为重要的货物运输工具,其导航与定位技术显得尤为重要。
本文将就海运船舶的导航与定位技术进行探讨,介绍其相关原理、应用和发展现状,以及对海运船舶运输的影响和前景展望。
一、导航技术的原理与应用1. 全球卫星导航系统全球卫星导航系统(GNSS)是现代海运船舶导航的主要手段之一。
该系统基于卫星发射的导航信号,通过接收和解算卫星信号来实现船舶的导航与定位。
主要的全球卫星导航系统有GPS(美国)、GLONASS(俄罗斯)、BeiDou(中国)和Galileo(欧洲)等。
2. 惯性导航系统惯性导航系统(INS)是一种基于惯性传感器的航行导航方式。
它通过测量船舶的加速度和角速度,以及采用数学模型来推算船舶的位置、速度和姿态等参数。
惯性导航系统具有独立性强、精度高的特点,在海洋环境中具有广泛的应用。
3. 电子海图与自动引导系统电子海图是基于卫星定位和地理信息系统技术,将传统纸制航海图数字化而成。
配合自动引导系统,可以实现航线规划、船舶位置动态显示、预警和碰撞避让等功能。
这一技术的应用大大提高了船舶的导航安全性和效率。
二、定位技术的原理与应用1. 水文测量与声纳定位水文测量技术可以通过测量水深和水下地貌,辅助船舶的定位和导航。
声纳定位则利用声波在水中的传播速度和回波反射信号,通过接收和处理声纳信号来确定船舶的位置和方位。
2. 雷达定位雷达定位技术是利用雷达发射出的电磁波与物体相互作用的原理,通过接收物体反射回来的波束来确定物体的位置和运动情况。
雷达定位技术在海运船舶的目标识别和位置确认方面具有重要作用。
3. 卫星通信与无线电定位卫星通信技术可以实现船舶与岸上通信基站的远距离通信,为船舶导航和定位提供重要信息。
无线电定位技术则基于无线电波的传播特性,通过地面测量站对船舶的无线电信号进行测量和分析,来确定船舶的位置。
三、海运船舶导航与定位技术的发展现状随着科技的不断进步,海运船舶导航与定位技术也在不断发展。
航海学I 船舶定位

四、有风流情况下的航迹绘算
在有风流情况下,真航向与风流影响下
的航迹向之间的关系是:
计划航迹向CA 真航向TC 风流压差 推算航迹向CG ( 船偏在航向线右面时为) ( 船偏在航向线左面时为)
为风流合压差,简称风流压差(1eeway and drift angle, )。
计划航迹向CA 左舷受流为+ TC 流中航,即真航向与航 迹向之间的夹角。
当船舶航行在已知水流要素的海区 时,航迹绘算工作主要是要解决以 下两类问题: 1.已知TC、VL 、流向、流速, 求船舶相对于海底的推算航迹向和 推算航程; 2 .已知CA和VL,求预配流压差 后船舶应该采用的真航向和推算航 程。
1.已知TC、VL、流向、流速,求推算
航迹向与推算航程的海图作业: (1)从推算起点画出真航向线,沿真航 向 线 截 取 计 程 仪 航 程 (SL=(L2— L1)(1+Δ L)=VLt),得积算点; (2)从积算点画水流矢量,截流程,得推 算终点; (3)连接起点与终点的矢量,即为推算航 迹向和推算航程;并进行正确标注。
计划航迹向CA 推算航迹向CG 真航向TC 即: 推算航程SG 计程仪航程S L
无风流情况下的航迹绘算步骤: 1.在海图上由推算起点画出计划航线即真航向线; 2.在此航向线上以计程仪航程(SL)或航速与航时 之积(VL•t)为推算航程(S)截得积算点为推算 船位的方法。 3.此船位称为积算船位(dead reckoning position,DR)。
风舷角是指风向与船首尾线的夹角。
风向是指风的来向;流向是指流的去向.
航海上把风舷角小于10º 的风称为顶风; 风舷角大于170º 的风称为顺风; 风来流去 风舷角在80º ~100º 之间的风称为横风; 风舷角在10º ~80º 之间的风称为偏逆风; 风舷角在100º ~170º 之间的风称为偏顺风 。 向下风漂移的速度远小于风速 方向也不一定与风向平行; 而是一个以R为矢量的方向和速度漂移,如下图;
第二章 船舶定位.

该公式仅适用于风压差值不超过10º~15º的情况。
K (V V W L)1.4(sinQ W 0.15sin2 Q W )
该公式适用于任何风压差值的情况。
风压差系数Kº,进行实测25-30次风压差值, 然后根据风压差系数公式,反推出风压差系数 Kº的平均值来。
(二)流与流压差
第一章 总 则 第一条 为了合理选择航线,及时掌握船位,统一海图作业标 注符号,保证船舶航行安全,充分发挥航海技术为社会主义水运事 业服务的作用,特制定本规则。 第二条 船长应对海图作业全面负责,并经常对驾驶员进行检 查指导。驾驶员应认真进行作业,发现问题,及时向船长报告,并 积极提供意见。 第三条 海图作业的基本要求 一、航区情况要熟悉。 二、各种助航仪器的误差数据要搞准,使用中要经常进行核对。 三、定船位要准、快、及时,做到勤测、勤算、勤核对,重要 船位要反复核对。 四、要不断总结经验,提高海图作业的准确度。
第二章 航线拟定
第六条 船长根据航次命令和有关航海资料,会同驾驶员共同 研究制定安全经济航线和安全措施。在拟定航线时应考虑到航区政 治情况;水文、气象因素;危险障碍物;助航标志;有关航行规章; 以及本船技术设备状态和驾驶人员的经验等。
第三章 航迹推算和船位观测
第七条 船舶驶出领航水域或港口后的观测船位可作为航迹推 算起点。驶入领航水域或接近港界有物标可供导航时,可终止航迹 推算。航迹推算的起点和终点应记人航海日志。
观测船位(observed position)OP——利用某种 观测手段对已知确切位置的物标进行观测所得的 船位。
二、风流对船舶航行的影响
(一)风与风压差
真风
1、风 概念
视风 船风
➢ 风向:来向
船舶定位(航海概论)
Ⅰ
+C
Ⅰ PG1 PG2
观测天体定位
天体在空 中的位置 圆心 天文船位圆 半径 六分仪 测得天体与水天 线之间垂直夹角 天体定位 天球坐标系 天体视运动 时间系统 船位线 高度差法 天体计算高度
适用范围:同半球、纬度不高、航程不长。
(END)
航迹计算(墨卡托航法)
公式:
Dϕ = ScosC Dλ = DMPtgC
D Dep DMP D S C A
B
适用范围:
除东西向航行外所有 情况。
(END)
陆标定位
陆标识别 方位定位(两方位定位、三方位定位) 距离定位 方位距离定位 移线定位
(END)
移线定位
概念 位置线转移方法(直线位置线转移方法、
圆弧位置线转移方法、折线位置线转移方法)
单标方位移线定位
移线定位方法
有准确船位后的单标方位移线定位 特殊移线定位
(四点方位法、倍角法、特殊角法)
(END)
单标两方位移线定位方法
移线定位方法:
将T1时刻的位置线P1 转移到T2时刻P1’, P1’和T2时刻的位置线 P2的交点为T2时刻的 移线船位。
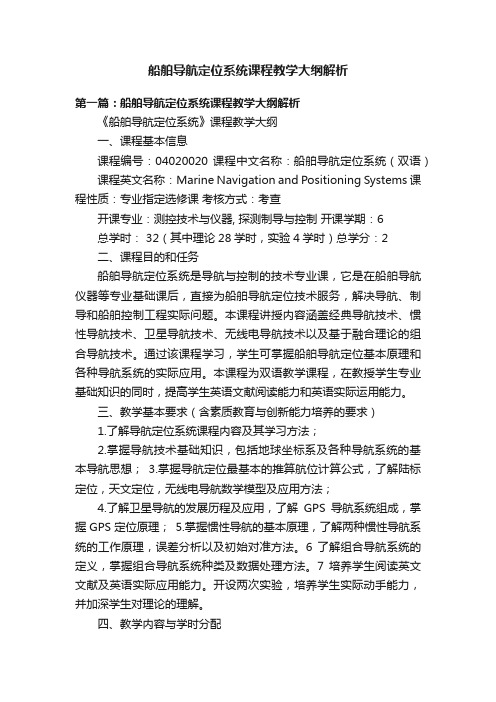
天文航海基本概念及定位原理
基本概念
天体地理位置PG 天体视高度ht′ 地面真地平 天体视差p 天体真高度ht=ht′+p 真顶距Z =90°-ht 地心真地平 天体船位圆 (1)圆心:天体地理位置PG (2)半径:90°-ht
B
p
A Z ht O ht’ PG A’ ht
第2章船舶定位
第2章船舶定位2.1海图作业的规定与要求2.1.1海图作业基本要求航迹推算的意义;海图作业规则要求;航线和船位的标注要求886. 根据我国海图规则的要求______船位差,必须进行过分析,作出记录.A.开航后的第一个B.每天中午的C接近沿岸的第一个D.每天0800的887. 海图作业标注时,计划航线上都应标注下列哪些内容Ⅰ.计划航迹向;Ⅱ.真航向;Ⅲ.罗航向。
IV.罗经差A.Ⅰ~IV B.I、Ⅲ、IV C.I、Ⅱ、IV D.Ⅱ、Ⅲ、V 888. 海图作业规则规定,可中止航迹推算的水域和情况是_______。
Ⅰ、狭窄水道;Ⅱ、频繁使用车、舵时;III、来往船舶较多时;IV大洋航行时A.I、ⅡB.Ⅱ、III C.Ⅲ、IV D.I~IV889. 海图作业规则规定,某航次的海图作业必须保留到________方可擦去。
A.船舶抵达目的港时B.本航次结束时C.海事调查和处理结束时D.B或C890. 海图作业规则要求,船舶航行中决定风流压差值的采用或改变的是。
A.值班驾驶员B.大副C.船长D.二副891. 海图作业试行规则规定,航行中驾驶员应对所采用的风流压差值不断进行测校,发现变化较大时,应及时_________。
A.进行修正并报告船长B.进行修正并转告下一值班驾驶员C.查明原因并报告船长D.报告船长892. 航迹绘算法与航迹计算法比较______。
A.航迹绘算法简单直观,是航迹推算的主要方法B.航迹绘算法求得的船位精度比航迹计算法高C.航迹绘算法可在任何情况下使用D.A.B.C都对893. 航迹推算是______。
A.天文定位和无线电航仪器定位的基础B.驾驶员在任何条件下,任何时刻求取船位的基本方法C驾驶员了解船舶在海上运动轨迹的基本方法D.A.B.C都是894. 航迹推算一般应在______立即开始。
A.船舶驶离码头后B.从锚地起锚航行时C.在驶离港口定速航行时D.出引航水域定速并测得船位后895. 航迹推算在____情况下可以暂时中止?A.航经危险物附近B.航经狭水道和渔区C遭遇人风浪D.航经雾区896. 航迹推算在航行过程中________。
船舶导航定位系统课程教学大纲解析
船舶导航定位系统课程教学大纲解析第一篇:船舶导航定位系统课程教学大纲解析《船舶导航定位系统》课程教学大纲一、课程基本信息课程编号:04020020 课程中文名称:船舶导航定位系统(双语)课程英文名称:Marine Navigation and Positioning Systems 课程性质:专业指定选修课考核方式:考查开课专业:测控技术与仪器, 探测制导与控制开课学期:6总学时: 32(其中理论28学时,实验4学时)总学分:2二、课程目的和任务船舶导航定位系统是导航与控制的技术专业课,它是在船舶导航仪器等专业基础课后,直接为船舶导航定位技术服务,解决导航、制导和船舶控制工程实际问题。
本课程讲授内容涵盖经典导航技术、惯性导航技术、卫星导航技术、无线电导航技术以及基于融合理论的组合导航技术。
通过该课程学习,学生可掌握船舶导航定位基本原理和各种导航系统的实际应用。
本课程为双语教学课程,在教授学生专业基础知识的同时,提高学生英语文献阅读能力和英语实际运用能力。
三、教学基本要求(含素质教育与创新能力培养的要求)1.了解导航定位系统课程内容及其学习方法;2.掌握导航技术基础知识,包括地球坐标系及各种导航系统的基本导航思想;3.掌握导航定位最基本的推算航位计算公式,了解陆标定位,天文定位,无线电导航数学模型及应用方法;4.了解卫星导航的发展历程及应用,了解GPS导航系统组成,掌握GPS定位原理;5.掌握惯性导航的基本原理,了解两种惯性导航系统的工作原理,误差分析以及初始对准方法。
6 了解组合导航系统的定义,掌握组合导航系统种类及数据处理方法。
7 培养学生阅读英文文献及英语实际应用能力。
开设两次实验,培养学生实际动手能力,并加深学生对理论的理解。
四、教学内容与学时分配第一篇船舶导航定位系统概述(4学时)第一章船舶导航定位系统的基本概念(1学时)介绍导航的基本概念,结合实例讲解导航在实际中的重要性,激发学生学习兴趣。
《航海学》船舶定位课件2_5天文定位
上海海事大学航海教研室制作
end
退出
1.求测天时的准确天文钟时
➢ 2)测天前启动秒表——先在海图室对照天文钟启动秒表记录 钟时CT1 ,再测高度并按停秒表,记录秒表时WT,则
➢ 测天时的准确天文钟时C.T.为:
➢
C.T.= CT1
+4s
累积日差
+2s 9
+)测定钟差
+1 m28s
测天时的钟差
+1 m30s9
上海海事大学航海教研室制作
end
退出
三、求测天时的天体位置
➢ 1.求测天时的准确天文钟时
➢ 两种测天计时方法: ➢ 1)测天时启动秒表——先测高度,再启动秒表,到海图室对
照天文钟按停秒表,记录钟时CT1和秒表时WT,则 ➢ 测天时的准确天文钟时C.T.为:
世界时(UT1)。 ➢ 有机械天文钟和石英天文钟两类。 ➢ 2 .GPS卫星导航仪 ➢ GPS(Global positioning System)导航仪显示UTC(协
调世界时),与UT1相差<0.9秒。
上海海事大学航海教研室制作
end
退出
一、船舶计时器
➢ 3.秒表 ➢ 用于测天计时等。 ➢ 4 .船钟 ➢ 船钟(Ship’s clocks)是用于指示船时的计时器。 ➢ 它有普通的机械钟和电子钟两类。 ➢ 目前现代化的船舶装有电子船钟系统(Electronic
➢ 器差(Instrument error) ——偏心差、棱性差和刻度差等的
综合误差
六分仪器差表
测角c 0 10 20 30 40 50 60 70 80 90 100 110 120
第二节船舶定位方法

第二节 船舶定位方法一、航迹推算(一)概述1.航海上确定船位的方法 1)航迹推算航迹推算是航行中求取船位的最基本方法。
它是根据船舶最基本的航海仪器(罗经和计程仪)指示的航向和航程,以及风流资料,在不借助于外界导航物标的条件下,从已知推算起点开始,推算出具有一定精度的航迹和船位。
2)定位定位是利用航海仪器,观测外界已确知其位置的物标,然后根据测量结果,求出观测时刻的船位。
⎧⎪⎨⎪⎩陆标定位定位无线电航海仪器定位天文定位2.航迹推算的种类 1)航迹绘算法即海图作业法,是根据船舶航行时的真航向、航程和风流要素,在海图上绘画出推算航迹和推算船位;或者根据计划航线,预配风流压差,作图求出应驶的真航向和推算船位。
2)航迹计算法航迹计算法是根据推算起点的经纬度、航向和航程,利用查表或利用数学计算公式,求到达点推算船位经纬度的方法。
3.航迹推算的作用 1)可随时确定船位;2)可预先推算出到达点的时间;3)估计船舶航行前方是否存在航行危险; 4)推算船位是天文定位和无线电定位的基础。
4.航迹推算的起、迄时间 1)起点:应在驶离引航水域或港界,定速航行后立即开始。
推算起点必须是准确的船位。
2)迄点抵达目的港领航水域或接近港界有物标或航标可供目测校验船位和导航时。
3)中断推算开始后不得无故中断。
但是,如果航经渔区或狭水道,由于转向频繁,可以暂时中止推算,但应将中断的起、迄点船位记入航海日志。
5.航迹推算中常用的名词术语1)计划航迹线简称计划航线,是根据安全、经济的原则在海图上拟定的航线,即船舶航行时计划要走的航线。
2)计划航迹向CA简称计划航向,是计划航迹前进的方向,由真北按顺时针方向计量到计划航迹线的角度。
3)推算航迹线通过航迹推算,预配风流压差后得到的航迹线,一般应与计划航线一致。
4)航迹线即实际航迹线,是船舶航行时所留下的航迹。
5)航迹向即实际航迹向,是由真北瞬时方向计量到航迹线的角度。
(二)航迹绘算1.无风流情况下的航迹绘算1)推算原则计划航向=真航向,即CG=TC推算航程=计程仪航程,即S G=S L(L2-L1)(1+∆L)2)作图方法由推算起点画出计划航线,在其上截取计程仪航程S L得一点,即为积算船位,用DR表示。
第二章 船舶定位
本节问题一 933.某船真航向225º,当时海区有西风,测 风舷角为________。 A.45º右 B.45º左 C.90º西 D.315º 934.某船真航向000º,海区内北风6级,则风 舷角为________。 A.0º B.180º C.无法确定 D.以上都不对
船舶在风中航行,除了以船速沿真航向航 行外,风还会使船舶向下风漂移。但由于船 舶在水中运动时所受水的阻力很大,因此这 种漂移的速度要远远小于风速,且漂移的方 向也不一定正好与风向平行。实际上,船舶 是在船速矢量和漂移矢量的共同作用下,沿 着它们的合成矢量方向航行的。 风中航迹线:船舶在有风无流中的航行轨 迹线,用CGa表示。 风压差角:风中航迹线与真航向线之间的 夹角,简称风压差(leeway),用a表示。
888.海图作业规则规定,可中止航迹推算的 水域和情况是_______Ⅰ、狭窄水道;Ⅱ、 频繁使用车、舵时;III、来往船舶较多时; IV大洋航行时
A.I、Ⅱ B.Ⅱ、III C.Ⅲ、IV D.I~IV
893. 893.航迹推算是______。 ______
A.天文定位和无线电航仪器定位的基础 B.驾驶员在任何条件下,任何时刻求取船位的基本方法 C. 驾驶员了解船舶在海上运动轨迹的基本方法 D.A.B.C都是
航迹推算在沿岸水流影响显著的航区应该每 小时进行一次;在其他航区,一般每2h-4h进行 一次。 二、陆标定位简介 航海上,虽然可以用航迹推算的方法求得推 算船位,但推算船位往往与实际相差较大。 (原因:不可能准确掌握罗经差、计程仪改正 率、风流压差及操纵要素等) 为确保船舶安全、经济地航行,航海人员必 须时刻重视测定本船准确的船位,使船舶沿着既定的 计划航线航行。
904.海图作业规则规定,船舶远离海岸航行, 正常情况下每昼夜至少应有________个天 测船位。
#《航海学》船舶定位课件2_5天文定位

4)天文钟的质量:日差小而稳定,良好;反之,质量就差。 若日差很不稳定,则该天文钟不宜使用。
end
3 .求测天时的钟差
测天时钟差 = 最近测定钟差 + 日差× 对钟至测天时的天数 例:1995年5月3日世界时03-00-00(东8区Z.T.1100)对时
测定2458号天文钟钟差+1m28s,日差+4s。5月4日东8区 Z.T.0430测太阳高度,求测太阳时刻的天文钟钟差。 解:
调世界时),与UT1相差<0.9秒。
end
一、船舶计时器
3.秒表 用于测天计时等。 4 .船钟 船钟(Ship’s clocks)是用于指示船时的计时器。 它有普通的机械钟和电子钟两类。 目前现代化的船舶装有电子船钟系统(Electronic
primary-secondary clocks system),又称母子钟,只 要通过调整驾驶台的母钟,则船上所有的子钟将作同步调 整。
测天时的准确天文钟时C.T.为:
C.T.= CT1 + C.E.+WT
前一种方法是商船上常用的方法
end
2.求测天世界时
例:1995年6月5日Z.T.0445(-8)进行星体高度观测。测天
时的天文钟钟时C.T1.08-48-17,测天时钟差C.E.-03 m12s,求 测天世界时TG。
测天世界时 TG 20-45-05 4/VI
利用GPS导航仪求测天世界时
方法与上述的利用天文钟的方法相同。测天世界时的求法也相 同,所不同的是这里不存在“钟差”改正问题 。
end
3. 《航海天文历》
《航海天文历》(Nautical almanac)——主要内容 1)航用天体的位置——左页是太阳、金星、火星、木星和土
第二篇第2章位置线和船位理论
二、位置线与船位线
• 在航海定位中,测者对物标进行 观测时,其观测值为常数的点的 几何轨迹,称为观测者的位置线 (1ine of position,LOP)。
• 观测者的位置线在时间上表明仅在观 测的时刻,符合该观测值的船位必定 在该位置线上;而不在该位置线上的 任何船位上的观测值均不是该观测值。 • 因此,观测者的位置线具有时间性与 绝对性两大特点。
• 这样,只要知道测量值的系统误 差和随机误差的标准差,利用上 述公式,就可以确定位置线的系 统误差与随机误差的标准差。位 置线的误差与测量值误差成正比, 与梯度成反比。
第四节系统误差影响下的船位误差及其校正方法
• 一、如何在航海实践中判断位置线存在系统 误差 • 通常可以如下判断: • 1.如果同时测定任意三条位置线定位所形 成的误差三角形的短边长超过正常界限(一 般在1:200 000的大比例尺海图上边长为 5mm)约0.5海里,则可能存在系统误差;
τ
∆u du g = lim = ∆n →0 ∆n dn
τ = α ± 90
o
∆u g= ∆n
• • • •
二、常用的平面位置线梯度 1.方位位置线梯度 (1)岸测船方位位置线梯度 如图所示,M为岸上已知坐标点,从M观测运动 中的船舶P,MP是真方位为B的方位位置线; MP1 为方位△B变化△B增量时的方位位置线, 位移量为: • △n=D·△B
第二章
陆标定位
• 第一节 位置线与船位线
• 一、航海观测误差及其分类 • 1、观测误差及其产生的原因 • 观测结果与被测量的真值之差叫作观测 的真误差(True Error),即
∆ = U0 −U
• 式中: ——被测量的真值 U •
U 0 ——被测量的观测值。
第二篇第二章陆标定位

11
第一节 位置线与船位线
• 在球面上,位于已知坐标的固定物标点M上的测 在球面上,位于已知坐标的固定物标点M 观测运动着的船舶户的方位时, 者,观测运动着的船舶户的方位时,其方位位置 线是由测者M画出,且与测者子午线(QMPNQ’)相 线是由测者M画出,且与测者子午线(QMPNQ’)相 交成所测方位角为的大圆弧MPP1P2(图 交成所测方位角为的大圆弧MPP1P2(图)。这是 因为无线电波和光波都是沿球面上两点间最短距 ——大圆弧传播的 大圆弧传播的。 离——大圆弧传播的。
2
第三章 陆标定位
选用定位的陆标 首选物标——灯塔,孤立尖顶小岛。 灯塔,孤立尖顶小岛。 首选物标 灯塔 用于目测的其它良好物标: 用于目测的其它良好物标: 山峰、岬角等。 山峰、岬角等。 原则: 原则:海图有准确位置且明显的可观测 的物标。 的物标。
3
第三章 陆标定位
第一节 位置线与船位线
观测值函数为常数的几何轨迹, 观测值函数为常数的几何轨迹,在数学上称 为等值线。本课程前面所讲的等磁差曲线、 为等值线。本课程前面所讲的等磁差曲线、等深 线及等高线就是这样的等值线。 线及等高线就是这样的等值线。 在航海定位中,测者对物标进行观测时, 在航海定位中,测者对物标进行观测时,其 观测值为常数的点的几何轨迹, 观测值为常数的点的几何轨迹,称为观测者的位 置线(1ine position,LOP)。 置线(1ine of position,LOP)。观测者的位 置线在时间上表明仅在观测的时刻, 置线在时间上表明仅在观测的时刻,符合该观测 值的船位必定在该位置线上; 值的船位必定在该位置线上;而不在该位置线上 的任何船位上的观测值均不是该观测值。 的任何船位上的观测值均不是该观测值。 因此, 因此,观测者的位置线具有时间性与绝对性 两大特点。 两大特点。 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四条 在进行海图作业过程中,一切重要数据资料,如重要 船位(改向时船位、长时间进行航迹推算后所测得的第一个观测船 位,以及转移船位的观测船位等)的观测数据;位移差的方向和距 离;所采用的风和流的资料等,均应记入航海日志。
第五条 本航次进行的海图作业,必须保留到下一航次开始时 方可擦去,以备查考。如果发生海事,应将当时进行作业的海图妥 善保存,以供海事调查之用。
航迹绘算可以解决两个问题。一是根据船舶 航行时的真航向、航程和风流资料用图解方法在海 图上直接画出航迹和推算船位;二是根据计划航线, 预配风流压差,作图画出真航向和推算船位。
航迹绘算的名词和术语
计划航迹线简称计划航线(intended track)ITR ——开航前根据航次命令,通过航线拟定,并画 在海图上的航线。
第一章 总 则 第一条 为了合理选择航线,及时掌握船位,统一海图作业标 注符号,保证船舶航行安全,充分发挥航海技术为社会主义水运事 业服务的作用,特制定本规则。 第二条 船长应对海图作业全面负责,并经常对驾驶员进行检 查指导。驾驶员应认真进行作业,发现问题,及时向船长报告,并 积极提供意见。 第三条 海图作业的基本要求 一、航区情况要熟悉。 二、各种助航仪器的误差数据要搞准,使用中要经常进行核对。 三、定船位要准、快、及时,做到勤测、勤算、勤核对,重要 船位要反复核对。 四、要不断总结经验,提高海图作业的准确度。
风流压差值小于一度时,可以不考虑计算。
二、风流压差值的采用或改变均应由船长决定,或由驾驶员根 据船长的指示进行。
三、航行中,驾驶员对所采用的风流压差值,应不断地进行测 校,发现变化较大,应及时报告船长。
第十条 在狭水道或渔区航行,可以不进行推算。但应将进入 狭水道或渔区前的中止点船位和驶出狭水道或渔区的推算复始点的 船位在海图上画出,并记入航海日志。
第二章 航线拟定
第六条 船长根据航次命令和有关航海资料,会同驾驶员共同 研究制定安全经济航线和安全措施。在拟定航线时应考虑到航区政 治情况;水文、气象因素;危险障碍物;助航标志;有关航行规章; 以及本船技术设备状态和驾驶人员的经验等。
第三章 航迹推算和船位观测
第七条 船舶驶出领航水域或港口后的观测船位可作为航迹推 算起点。驶入领航水域或接近港界有物标可供导航时,可终止航迹 推算。航迹推算的起点和终点应记人航海日志。
第八条 在航迹推算中,应充分使用风流资料,仔细推算。接 近危险地区,应考虑到推算船位本身存在一定的误差,必须采取谨 慎措施。
第九条 一、在航迹推算中,对风流的影响,应按以下规定进 行计算,风压差、流压差、风流合压差值(简称风流压差值,以下 同),尽可能用观测的方法求得。如无观测条件时,可根据该地区 的资料或航行经验,确定一个数值进行计算。
第二章 船舶定位
➢第一节 海图作业的规定与要求 ➢第二节 航迹绘算 ➢第三节 风流压差的测定 ➢第四节 航迹计算 ➢第五节 陆标定位
第一节 海图作业的基本要求
➢1. 海图作业基本要求;航线和船 位的标注要求
➢2. 确定推算船位和观测船位的时 间间隔要求;应记入航海日志的 重要数据
海图作业试行规则
能见度不良情况下,应充分使用雷达进行定位。
(二)远离海岸航行,应充分利用天测,无线电测向仪等定位方 法。天测定位,在正常情况下,每昼夜至少有三个天测船位(晨、 昏和上午或下午太阳位置线间或与中午船位纬度间的移线船位各一 个)。无线电测向定位,在有条件观测时,每两小时定位一次。
第四章 分析研究
第十三条 船长应重视组织驾驶员对船位差进行分析,积累资 料,积累经验。在分析中应重点对仪器误差、风流的影响和本船操 作情况进行分折,并择要做出记录。
三、航向的标注应照下列次序标出:计划航向及其相对应的罗 经航向、罗经改航向用三位数字标出。
当航线接近南北,或航线太短,航向不宜按上述规定标注时, 可标注在航线的旁边,并以箭头示之。
第十六条 观测船位记入航海日志时,应记观测原始数据,包 括:时间、计程仪读数、物标名称和有关读数及改正量(天测船位, 记天体名称、船位坐标.不记改正量)、船位差(参考性的船位不记 船位差)。
长时间进行航迹推算后,在接近沿岸时所测得的第一个观测船 位的船位差数据,必须进行分析,做出记录,供今后参考。
第五章 标注和记载
第十四条 常用名词的缩写代号(见下表)。
第十五条 海图上的标注
一、观测或推算船位的时间和计程仪指示的读数,以分数式标 出。分数式和海图的横廓相平行。
二、船位差的方向和距离.以推算船位为起点到观测船位。
第二节 航迹推算
目的要求:熟悉风、流对船舶航行的影响, 熟悉风流中航行海图作业方法。
➢1. 航迹绘算的基本概念
➢2. 风流对船舶航行的影响(风流压差 的概念及其影响因素 )
➢3.航迹绘算的基本方法,影响推算船位 精度的因素和船位精度
一、航迹推算的基本概念 1、航迹推算的概念
航迹推算是在不借助外界导航物标的条件下,只依靠船舶 最基本的航海仪器(罗经和计程仪)所指示的航向和航程并计及 外界风流资料,从已知的推算起始点开始,推算出具有一定精 度的航迹和某一时刻的船位。
2、航迹推算的作用
航迹推算是驾驶员在任何情况下,在任何时刻都能求取船位 的最基本方法。航迹推算还能使驾驶员清晰地了解船舶在海上 运动的连续轨迹,并且能在海图上推测航行前方有无航海危险。 同时推算船位又是陆标定位、天文定位和无线电航海仪器定位 的基础。
3、航迹绘算(track pLotting)
航迹绘算又称为海图作业法。这种方法简单、 直观,是船舶航行中驾驶员进行推算的主要方法。
第十一条 如果发现船位差较大,且需要转移推算起点时,应 报经船长同意后,才可将推算船位转移到观测船位。
第十二条 对定位时间间隔的要求
一、推算船位
(一)在沿岸水流影响显著地区航行,每一小时定位一次。
(二)其他地区航行,一般情况下,每二或四小时定位一次。
二、观测船位
(一)沿岸航行,船速在15节以下,每半小时定位一次。接近危 险地区或船速在15节以上,均应适当缩短定位时间间隔。