船舶定位(航海概论)
航海学I船舶定位
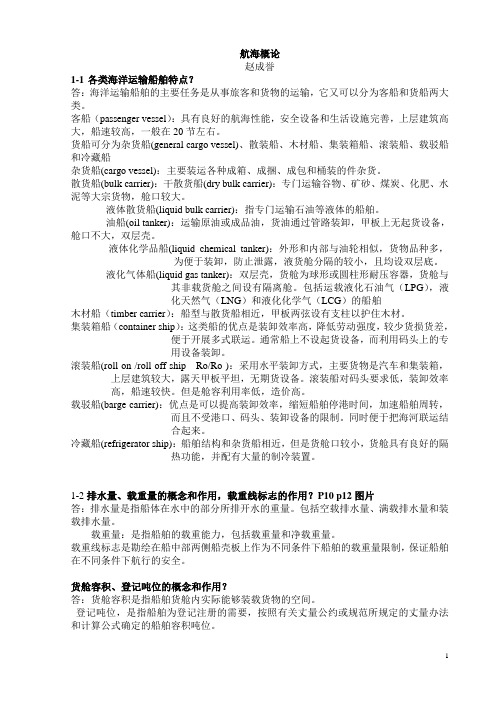
❖3.风生流(wind-drift current):是
本海区或相邻海区受较长时间定向
风的作用,使海水表层产生水平方
向的流动。
VC
0.0127
sin VW
(m/s)
按此公式计算,五级风可能产生1/3kn,八 级风可能产生2/3 kn风生流。流向约从下风 向偏开45º,在北半球向右偏开,在南半球向
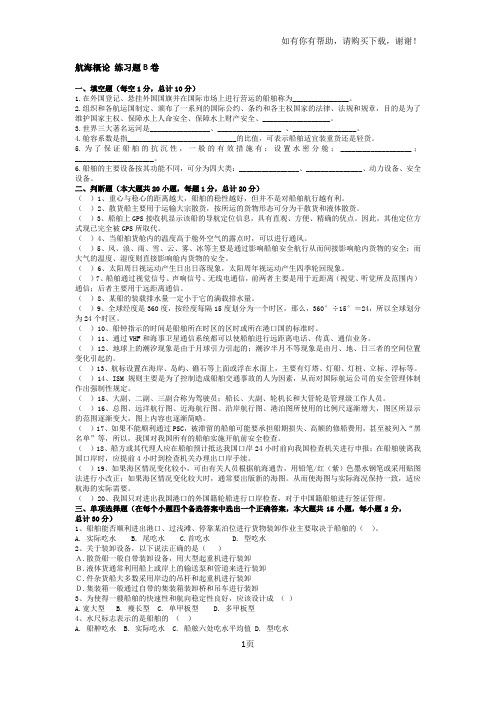
⑤连接推算起点和推算船位,此连线 即为推算航迹线,其长为推算航程S; 风中航迹向与推算航迹向之间夹角为 流压差;并进行正确标注。
40'.0
1000 40'.0
TC
CG 070 GC 055 DG 1 4 10
0800 10'.5
2.已知计划航迹向CA,计程仪航程 SL或计程仪航速VL和风流资料,求 真航向TC和推算航程S。
航向误差:
1. 罗经误差 2. △C, △G的误差 3. 操舵不稳产生的误差 4. 绘航线的误差
航程误差:
1. 读取计程仪计数的误差 2. △L 误差 3. 海图上量取程的误差有关
综合上述各因素:无风流时推算船位的误差2%SL
二、有风无流情况下的航迹绘算
❖ 风与风压差 1.由于船舶自身运动产生的风,叫做船 风。船风的风向与航迹向方向相同, 风速等于船速。 2.因此,船舶在风中航行时驾驶人员所 测得的风,不是真风,而是真风与船 风的合成风,叫做视风。真风、船风、 视风三者之间关系可以用风速矢量三 角形来求得。
2 .已知CA和VL,求预配流压差
后船舶应该采用的真航向和推算航 程。
❖ 1.已知TC、VL、流向、流速,求推算 航迹向与推算航程的海图作业:
(1)从推算起点画出真航向线,沿真航 向 线 截 取 计 程 仪 航 程 (SL=(L2— L1)(1+ΔL)=VLt),得积算点; (2)从积算点画水流矢量,截流程,得推 算终点;
第二节船舶定位方法

第二节 船舶定位方法一、航迹推算(一)概述1.航海上确定船位的方法 1)航迹推算航迹推算是航行中求取船位的最基本方法。
它是根据船舶最基本的航海仪器(罗经和计程仪)指示的航向和航程,以及风流资料,在不借助于外界导航物标的条件下,从已知推算起点开始,推算出具有一定精度的航迹和船位。
2)定位定位是利用航海仪器,观测外界已确知其位置的物标,然后根据测量结果,求出观测时刻的船位。
⎧⎪⎨⎪⎩陆标定位定位无线电航海仪器定位天文定位2.航迹推算的种类 1)航迹绘算法即海图作业法,是根据船舶航行时的真航向、航程和风流要素,在海图上绘画出推算航迹和推算船位;或者根据计划航线,预配风流压差,作图求出应驶的真航向和推算船位。
2)航迹计算法航迹计算法是根据推算起点的经纬度、航向和航程,利用查表或利用数学计算公式,求到达点推算船位经纬度的方法。
3.航迹推算的作用 1)可随时确定船位;2)可预先推算出到达点的时间;3)估计船舶航行前方是否存在航行危险; 4)推算船位是天文定位和无线电定位的基础。
4.航迹推算的起、迄时间 1)起点:应在驶离引航水域或港界,定速航行后立即开始。
推算起点必须是准确的船位。
2)迄点抵达目的港领航水域或接近港界有物标或航标可供目测校验船位和导航时。
3)中断推算开始后不得无故中断。
但是,如果航经渔区或狭水道,由于转向频繁,可以暂时中止推算,但应将中断的起、迄点船位记入航海日志。
5.航迹推算中常用的名词术语1)计划航迹线简称计划航线,是根据安全、经济的原则在海图上拟定的航线,即船舶航行时计划要走的航线。
2)计划航迹向CA简称计划航向,是计划航迹前进的方向,由真北按顺时针方向计量到计划航迹线的角度。
3)推算航迹线通过航迹推算,预配风流压差后得到的航迹线,一般应与计划航线一致。
4)航迹线即实际航迹线,是船舶航行时所留下的航迹。
5)航迹向即实际航迹向,是由真北瞬时方向计量到航迹线的角度。
(二)航迹绘算1.无风流情况下的航迹绘算1)推算原则计划航向=真航向,即CG=TC推算航程=计程仪航程,即S G=S L(L2-L1)(1+∆L)2)作图方法由推算起点画出计划航线,在其上截取计程仪航程S L得一点,即为积算船位,用DR表示。
第二章 船舶定位.

该公式仅适用于风压差值不超过10º~15º的情况。
K (V V W L)1.4(sinQ W 0.15sin2 Q W )
该公式适用于任何风压差值的情况。
风压差系数Kº,进行实测25-30次风压差值, 然后根据风压差系数公式,反推出风压差系数 Kº的平均值来。
(二)流与流压差
第一章 总 则 第一条 为了合理选择航线,及时掌握船位,统一海图作业标 注符号,保证船舶航行安全,充分发挥航海技术为社会主义水运事 业服务的作用,特制定本规则。 第二条 船长应对海图作业全面负责,并经常对驾驶员进行检 查指导。驾驶员应认真进行作业,发现问题,及时向船长报告,并 积极提供意见。 第三条 海图作业的基本要求 一、航区情况要熟悉。 二、各种助航仪器的误差数据要搞准,使用中要经常进行核对。 三、定船位要准、快、及时,做到勤测、勤算、勤核对,重要 船位要反复核对。 四、要不断总结经验,提高海图作业的准确度。
第二章 航线拟定
第六条 船长根据航次命令和有关航海资料,会同驾驶员共同 研究制定安全经济航线和安全措施。在拟定航线时应考虑到航区政 治情况;水文、气象因素;危险障碍物;助航标志;有关航行规章; 以及本船技术设备状态和驾驶人员的经验等。
第三章 航迹推算和船位观测
第七条 船舶驶出领航水域或港口后的观测船位可作为航迹推 算起点。驶入领航水域或接近港界有物标可供导航时,可终止航迹 推算。航迹推算的起点和终点应记人航海日志。
观测船位(observed position)OP——利用某种 观测手段对已知确切位置的物标进行观测所得的 船位。
二、风流对船舶航行的影响
(一)风与风压差
真风
1、风 概念
视风 船风
➢ 风向:来向
第二章 船舶定位
921.风压差可________。
A.根据风向、风速作图求得 C.从风压差表求得 B.通过实测求得 D.B和C都对
922.风压差系数Kº 是如何求得的________。
A.理论推导得出 B.多次测定风压差后反推而得 C.根据船舶受风面积计算而得 D.根据经验估计
923.风压差系数K值应由________。
航迹推算在沿岸水流影响显著的航区应该每 小时进行一次;在其他航区,一般每2h-4h进行 一次。 二、陆标定位简介 航海上,虽然可以用航迹推算的方法求得推 算船位,但推算船位往往与实际相差较大。 (原因:不可能准确掌握罗经差、计程仪改正 率、风流压差及操纵要素等) 为确保船舶安全、经济地航行,航海人员必 须时刻重视测定本船准确的船位,使船舶沿着既定的 计划航线航行。
A.成正比 B.成反比 C.的正弦成正比 D.的余弦成反比
917.风压差的大小。
A.与风速有关,但与风向无关 B.与风舷角有关,风舷角90º 时最大 C.与船舶吃水差有关,但与船舶吃水无关 D.与船速有关,但与船舶干舷无关
918.下列哪些因素能影响风压差的大小?I、潮 流;II、风速;III、风舷角;IV、吃水;V、 海流
A.方向航程和气象资料 B.航向、方位、距离和风流资料 C.航向、航程和气象资料D.航向、航程和风流资料
一、风对船舶航行的影响 真风:空气相对于地面或海底的水平运 动。风是矢量,既有大小又有方向。风向是 指风的来向 ,习惯用罗经点或圆周法表 示 ;风的大小一般用风速或风级来表示 。 船风:由于船舶自身运动产生的风。船风 的风向与航迹向方向相同,风速等于船速。 因此,船舶在风中航行时驾驶人员所测得 的风,不是真风,而是真风与船风的合成 风,叫做视风。真风、船风、视风三者之间] 关系可以用风速矢量三角形来求得
船舶定位(航海概论)
Ⅰ
+C
Ⅰ PG1 PG2
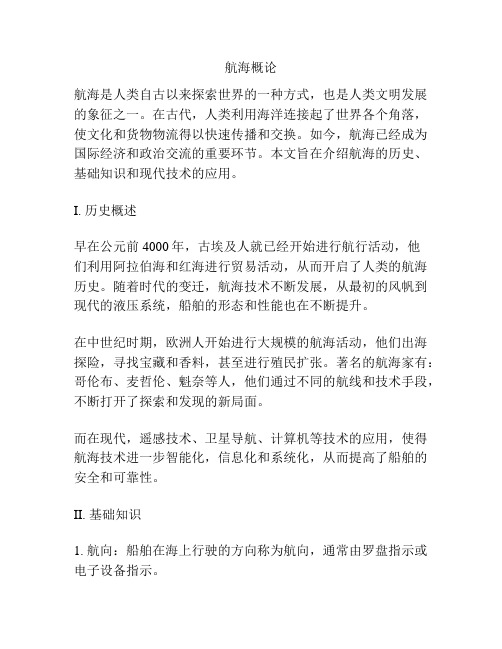
观测天体定位
天体在空 中的位置 圆心 天文船位圆 半径 六分仪 测得天体与水天 线之间垂直夹角 天体定位 天球坐标系 天体视运动 时间系统 船位线 高度差法 天体计算高度
适用范围:同半球、纬度不高、航程不长。
(END)
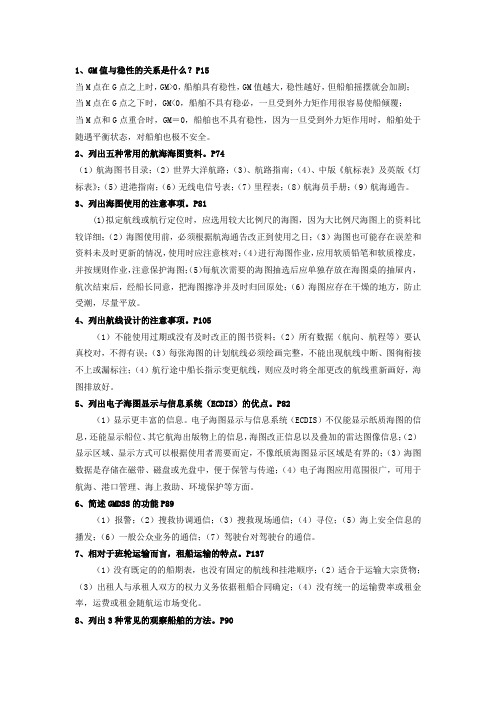
航迹计算(墨卡托航法)
公式:
Dϕ = ScosC Dλ = DMPtgC
D Dep DMP D S C A
B
适用范围:
除东西向航行外所有 情况。
(END)
陆标定位
陆标识别 方位定位(两方位定位、三方位定位) 距离定位 方位距离定位 移线定位
(END)
移线定位
概念 位置线转移方法(直线位置线转移方法、
圆弧位置线转移方法、折线位置线转移方法)
单标方位移线定位
移线定位方法
有准确船位后的单标方位移线定位 特殊移线定位
(四点方位法、倍角法、特殊角法)
(END)
单标两方位移线定位方法
移线定位方法:
将T1时刻的位置线P1 转移到T2时刻P1’, P1’和T2时刻的位置线 P2的交点为T2时刻的 移线船位。
天文航海基本概念及定位原理
基本概念
天体地理位置PG 天体视高度ht′ 地面真地平 天体视差p 天体真高度ht=ht′+p 真顶距Z =90°-ht 地心真地平 天体船位圆 (1)圆心:天体地理位置PG (2)半径:90°-ht
B
p
A Z ht O ht’ PG A’ ht
航海概论-讲义
《航海概论》课堂讲义邱文昌 编商船学院 船舶管理教研室2014.09目 录第一章 船 舶 (1)第二章 航海基础知识 (11)第三章 航海气象 (20)第四章 潮汐与海流 (28)第五章 船舶通信 (32)第六章 船舶定位与航行方法 (38)第七章 船舶操纵与避碰 (46)第八章 船舶航政管理 (55)第九章 船员管理与职责 (60)第一章 船 舶第一节 船舶基础知识 一、船舶主要部位与舱室名称二、主要营运船舶及其特点1. 杂货船(General cargo ship)(1) 多层甲板,双层底,舱容相对较大;(2) 配有起货设备;(3) 有些设有冷藏舱、深舱、贵重舱等。
2. 散货船(Bulk cargo carrier)1) 矿砂船 (Ore carrier)(1) 舱容相对较小,常不设装卸设备;(2) 单层甲板,设有较高的双层底和大容量的翼侧2水舱;(3) 舱壁设计成斜面形。
2) 散粮船 (Bulk grain carrier) (1) 单层甲板,设置双层底; (2) 设置顶边水舱和底边水舱; (3) 舱口围较高。
3. 集装箱船(Container ship) 1) 吊装式LO/LO (Lift on/Lift off ) (1) 尾机型或中后机型船; (2) 单甲板,宽舱口;(3) 双层壳船体结构,设有大容量压载水舱; (4) 舱内设有箱格导轨,舱面配有专用系固设备。
2) 滚装船RO/RO (Roll on/Roll off )(1) 以轮载箱或汽车为运输单元;(2) 设置首门、侧门或尾门及与岸连接的跳板; (3) 甲板层间设有斜坡道或升降机。
3) 载驳船FO/FO (Float on/Float off ) (1) 以驳船为运输单元;(2) 采用龙门吊(Lash )、升降平台(See-bee)和浮船坞(Baco)方式装卸;(3) 无需码头,适合于海河运输。
4. 油船(Oil tanker) (1) 尾机型船;(2) 多数油轮货舱内设有纵隔壁; (3) 货舱口和船舶型深较小;(4) 甲板上设有人行步桥及各种管系;(5) 货油舱与其他舱舱室间设有隔离舱。
航海概论
航海概论赵成誉1-1各类海洋运输船舶特点?答:海洋运输船舶的主要任务是从事旅客和货物的运输,它又可以分为客船和货船两大类。
客船(passenger vessel):具有良好的航海性能,安全设备和生活设施完善,上层建筑高大,船速较高,一般在20节左右。
货船可分为杂货船(general cargo vessel)、散装船、木材船、集装箱船、滚装船、载驳船和冷藏船杂货船(cargo vessel):主要装运各种成箱、成捆、成包和桶装的件杂货。
散货船(bulk carrier):干散货船(dry bulk carrier):专门运输谷物、矿砂、煤炭、化肥、水泥等大宗货物,舱口较大。
液体散货船(liquid bulk carrier):指专门运输石油等液体的船舶。
油船(oil tanker):运输原油或成品油,货油通过管路装卸,甲板上无起货设备,舱口不大,双层壳。
液体化学品船(liquid chemical tanker):外形和内部与油轮相似,货物品种多,为便于装卸,防止泄露,液货舱分隔的较小,且均设双层底。
液化气体船(liquid gas tanker):双层壳,货舱为球形或圆柱形耐压容器,货舱与其非载货舱之间设有隔离舱。
包括运载液化石油气(LPG),液化天然气(LNG)和液化化学气(LCG)的船舶木材船(timber carrier):船型与散货船相近,甲板两弦设有支柱以护住木材。
集装箱船(container ship):这类船的优点是装卸效率高,降低劳动强度,较少货损货差,便于开展多式联运。
通常船上不设起货设备,而利用码头上的专用设备装卸。
滚装船(roll on /roll off ship Ro/Ro ):采用水平装卸方式,主要货物是汽车和集装箱,上层建筑较大,露天甲板平坦,无期货设备。
滚装船对码头要求低,装卸效率高,船速较快。
但是舱容利用率低,造价高。
载驳船(barge carrier):优点是可以提高装卸效率,缩短船舶停港时间,加速船舶周转,而且不受港口、码头、装卸设备的限制。
航海概论练习题B卷
航海概论练习题B卷一、填空题(每空1分,总计10分)1.在外国登记、悬挂外国国旗并在国际市场上进行营运的船舶称为_______________。
2.组织和各航运国制定、颁布了一系列的国际公约、条约和各主权国家的法律、法规和规章,目的是为了维护国家主权、保障水上人命安全、保障水上财产安全、__________________。
3.世界三大著名运河是________________、_________________ 、_________________。
4.舱容系数是指_____________________________的比值,可表示船舶适宜装重货还是轻货。
5.为了保证船舶的抗沉性,一般的有效措施有:设置水密分舱;___________________;_____________________。
6.船舶的主要设备按其功能不同,可分为四大类:________________、_______________、动力设备、安全设备。
二、判断题(本大题共20小题,每题1分,总计20分)()1、重心与稳心的距离越大,船舶的稳性越好,但并不是对船舶航行越有利。
()2、散货船主要用于运输大宗散货,按所运的货物形态可分为干散货和液体散货。
()3、船舶上GPS接收机显示该船的导航定位信息,具有直观、方便、精确的优点。
因此,其他定位方式现已完全被GPS所取代。
()4、当船舶货舱内的温度高于舱外空气的露点时,可以进行通风。
()5、风、浪、雨、雪、云、雾、冰等主要是通过影响船舶安全航行从而间接影响舱内货物的安全;而大气的温度、湿度则直接影响舱内货物的安全。
()6、太阳周日视运动产生日出日落现象,太阳周年视运动产生四季轮回现象。
()7、船舶通过视觉信号、声响信号、无线电通信,前两者主要是用于近距离(视觉、听觉所及范围内)通信;后者主要用于远距离通信。
()8、某船的装载排水量一定小于它的满载排水量。
()9、全球经度是360度,按经度每隔15度划分为一个时区,那么,360°÷15°=24,所以全球划分为24个时区。
《航海概论》授课教案

《航海概论》授课教案钦州学院教案【首页】课程名称航海概论轮机本授课专业轮机工程班级 071 课程编号必修课校级公共课( );基础或专业基础课( );专业课( ) 课程类型选修课限选课(?);任选课( )授课方式课堂讲授(?);实践课( ) 考核方式考试(?);考查( ) 课程教学学分数总学时数学时分配课堂讲授30学时; 实践课0学时项目名称作者出版社教《航海概论》邱志雄人民交通出版社,2000年版材主编船舶安全管理洪碧光大连海事大学出版社1999编著航海学丁勇等人民交通出版社2001主编参考书航海气象与海洋学陈家辉人民交通出版社2002等主编授课教师何鶄职称单位物电系授课时间 1-10周注:表中( )选项请打“?”1钦州学院教案【理、工科】周次第1周,第1次课备注章节第1章船舶名称授课教学理论课(?);实践课( );实习( ) 3 方式时数教学目要求了解船舶种类、结构及其重要的组成设备,掌握船舶主的要性能和主要设备的用途等基础知识及要求时间教学内容提要分配第一节船舶基本知识1、船舶种类2、船舶部位划分与舱室名称3、船舶主尺度与主尺度比4、船舶吃水与水尺标志第二节船舶营运性能1、载重性能2、容积性能3、速度性能第三节船舶航行性能浮性、稳性、抗沉性、快速性、摇摆性、操纵性第四节船舶主要设备动力设备、操纵设备、装卸设备、安全设备2备注教学重重点:了解船舶航行性能,主要的甲板机械点与难点:熟悉甲板机械的基本工作原理与用途难点讨论、练习、作业教学主要以教师课堂讲授为主,在讲解甲板机械时可以展示多媒体手段参考资料注:教案按授课次数填写,每次授课均应填写一份。
重复班授课可不另填写教案。
3钦州学院教案【理、工科】周次第2周,第1次课备注章节第二章航海基础知识名称授课教学理论课(?);实践课( );实习( ) 3 方式时数教学目要求了解驾驶员完成海上运输任务所掌握的一般知识,知的道海图、坐标、航向、航程、时间标准等基础概念及要求时间教学内容提要分配第一节地理坐标第二节航向与方位1、方向的划分2、航向、方位、舷角3、方向的测定第三节距离和速度海上的距离单位、能见度第四节时间系统时间的概念、拨钟与日期变更第五节航标第六节航海图书资料4备注教学重点:海上的方向与距离基本概念,知道海图、坐标、航向、重航程、时间标准等基础概念点与难点:理解时区与拨钟难点讨论、练习、作业教学主要以教师课堂讲授为主手段参考资料注:教案按授课次数填写,每次授课均应填写一份。
航海学-第三章 船舶定位1

时间:沿岸水流影响显著航
区:1h一次,其它航区:2h4h一次
(END)
6
航迹推算简介(类型)
船舶定位方法
航迹推算
概念 意义 有关规定
航迹推算类型
TC、SL、风流 CG、EP CA、SL、风流TC、EP
(END)
7
航迹推算简介(基本训练)
船舶定位方法 航迹推算
(如图)(END)
20
有风无流绘算(风舷角QW)
顶风:QW
< 10° 顺风: QW > 170° 横风: 偏逆风 100° > QW > 80° 800 0 偏逆风: 90 左横风 80° > QW > 10° 1000 偏顺风 偏顺风: 170° > QW > 100°
(END) 17
无风流航迹绘算(推算精度)
a C A m C + m C d m m S + S E B F b D
绘画航线的精度:
c
18
读取航向、罗经差、操舵不稳、作图误差 截取航程的精度: 读取航程、改正率、作图误差 推算船位误差园半径:2SL%。(END)
有风无流航迹绘算
风与风舷角
海图作业工具: 基本操作:
概念 意义 有关规定
航迹推算类型
海图作业基本训练
(END)
量取某点的经纬度 根据经纬度标绘某点 量取物标TB、Dist. 由已知点绘画方位线,在 其上截取距离求取经纬度
(END)
8
无风流航迹绘算
无风流:(风流很小,对航向影响<1°) 基本概念
航海概论1
航海概论航海是人类自古以来探索世界的一种方式,也是人类文明发展的象征之一。
在古代,人类利用海洋连接起了世界各个角落,使文化和货物物流得以快速传播和交换。
如今,航海已经成为国际经济和政治交流的重要环节。
本文旨在介绍航海的历史、基础知识和现代技术的应用。
I. 历史概述早在公元前4000年,古埃及人就已经开始进行航行活动,他们利用阿拉伯海和红海进行贸易活动,从而开启了人类的航海历史。
随着时代的变迁,航海技术不断发展,从最初的风帆到现代的液压系统,船舶的形态和性能也在不断提升。
在中世纪时期,欧洲人开始进行大规模的航海活动,他们出海探险,寻找宝藏和香料,甚至进行殖民扩张。
著名的航海家有:哥伦布、麦哲伦、魁奈等人,他们通过不同的航线和技术手段,不断打开了探索和发现的新局面。
而在现代,遥感技术、卫星导航、计算机等技术的应用,使得航海技术进一步智能化,信息化和系统化,从而提高了船舶的安全和可靠性。
II. 基础知识1. 航向:船舶在海上行驶的方向称为航向,通常由罗盘指示或电子设备指示。
2. 舵角:船舶的舵脚朝左或朝右时,与船舶正前方的角度差称为舵角。
舵角的调整能够改变航向和船速。
3. 船速:船舶在航行过程中通过GPS等设备测定的速度。
4. 船位:船在海上的位置。
III. 现代技术应用1. GPS:全球定位系统,是由多颗卫星在轨道上运行,可以用来确定船舶的精确位置以及速度等信息。
2. 惯性导航系统(INS):利用陀螺仪和加速度计等仪器,可以自动计算船舶的位置和速度。
3. 自动导航系统:结合GPS和INS技术,通过编程实现自动控制船舶航向和速度等。
4. 液压操作系统:通过液体传动力量,使得舵、缆绳等设备可以自动化控制。
IV. 总结航海技术的发展,为人类文明的进一步发展做出了重要的贡献。
从最初的靠风帆航行到现代的高科技运用,航海技术的进步不断提高船舶的安全和效率,为世界不同地区的贸易和文化交流奠定了基础。
而在未来,科技将继续推动航海技术的发展,任何时候,人们都不应该忘记海洋为人类文明带来的巨大价值和意义。
《航海概论》课程标准

《航海概论》课程标准一、课程性质与任务本课程是港口与航运管理专业的一门专业基础课程。
按照立德树人根本要求,以“三全育人”为路径,培养学生高尚道德情操和正确价值观。
通过本课程的学习,使学生对船舶、航海有基本的认知,为后续专业课程打下坚实的基础。
前续课程为《国际航运地理》;后续课程为《理货业务》、《国际货运代理实务》、《海上货物运输与保险》、《港口装卸工作组织》、《船舶代理业务》。
二、课程教学目标(一)知识目标1.掌握船员组织,船员的职责;2.掌握船舶基本常识,船舶动力设备、操纵设备、装卸设备和安全设备以及船舶的各种航行性能;3.掌握航海地理坐标,航向和方位,船舶能见距离,船舶航速和航程相关计算,船舶时间系统;4.掌握航海气象和海况;5.掌握航行计划的制定,航行值班的安排,特殊地区的航向方法;6.掌握航行途中货物的保管方法。
(二)能力目标1.能看懂船舶规范;2.能看懂船舶航行计划。
(三)素质目标1.通过完成工作任务培养学生独立思考学习的能力;2.良好的道德品质,沟通协调能力和团队合作精神;3.培养学生勤于思考、刻苦钻研、用于探索的良好作风。
三、参考学时参考课时:36学时四、课程学分课程学分:2学分五、课程内容和要求六、教学建议(一)教学方法建议在有条件的情况下更多的采用“线上+线下”混合式教学模式,融入移动信息化教学手段。
建议采用“教、学、做”三位一体教学模式,建议运用现代信息技术,建立船舶结构实训室采用案例教学,情境模拟、实境教学等多种教学方法,营造开放仿真的教学环境,引导学生带着问题去学习探究,使学生真正成为课堂学习的主体。
建议进行分组教学,项目教学,在教学过程中锻炼学生沟通能力、协作能力、组织领导能力及团队精神。
建议进行双语教学,让学生习惯船舶结构的英文表达。
(二)教学评价引入行业标准和作业规范,建设课程在线题库,实现教考分离。
注重过程考核和能力评价。
(三)教学条件1..实验实训条件建议2.师资条件本课程的教师建议具有海船驾驶专业本科及以上学历并持有甲类三副及以上职务证书。
航海概论复习资料
1、GM值与稳性的关系是什么?P15当M点在G点之上时,GM>0,船舶具有稳性,GM值越大,稳性越好,但船舶摇摆就会加剧;当M点在G点之下时,GM<0,船舶不具有稳必,一旦受到外力矩作用很容易使船倾覆;当M点和G点重合时,GM=0,船舶也不具有稳性,因为一旦受到外力矩作用时,船舶处于随遇平衡状态,对船舶也极不安全。
2、列出五种常用的航海海图资料。
P74(1)航海图书目录;(2)世界大洋航路;(3)、航路指南;(4)、中版《航标表》及英版《灯标表》;(5)进港指南;(6)无线电信号表;(7)里程表;(8)航海员手册;(9)航海通告。
3、列出海图使用的注意事项。
P81(1)拟定航线或航行定位时,应选用较大比例尺的海图,因为大比例尺海图上的资料比较详细;(2)海图使用前,必须根据航海通告改正到使用之日;(3)海图也可能存在误差和资料未及时更新的情况,使用时应注意核对;(4)进行海图作业,应用软质铅笔和软质橡皮,并按规则作业,注意保护海图;(5)每航次需要的海图抽选后应单独存放在海图桌的抽屉内,航次结束后,经船长同意,把海图擦净并及时归回原处;(6)海图应存在干燥的地方,防止受潮,尽量平放。
4、列出航线设计的注意事项。
P105(1)不能使用过期或没有及时改正的图书资料;(2)所有数据(航向、航程等)要认真校对,不得有误;(3)每张海图的计划航线必须绘画完整,不能出现航线中断、图徇衔接不上或漏标注;(4)航行途中船长指示变更航线,则应及时将全部更改的航线重新画好,海图排放好。
5、列出电子海图显示与信息系统(ECDIS)的优点。
P82(1)显示更丰富的信息。
电子海图显示与信息系统(ECDIS)不仅能显示纸质海图的信息,还能显示船位、其它航海出版物上的信息,海图改正信息以及叠加的雷达图像信息;(2)显示区域、显示方式可以根据使用者需要而定,不像纸质海图显示区域是有界的;(3)海图数据是存储在磁带、磁盘或光盘中,便于保管与传递;(4)电子海图应用范围很广,可用于航海、港口管理、海上救助、环境保护等方面。
航海学-第三章 船舶定位2

end
天津海运职业学院航海教研室 退出
§2 陆标定位的方法
一、陆标识别的方法 二、方位的测定方法 三、距离的测定方法
NT M TB=310° TB±180° =310°-180 °
2)近距离岸测船方位位置线
物标 M 处的测者观测船 舶得TB=131° 。求船 舶位置线 这是由物标 M 处的测者 观测 船 舶 的 TB 得到 的 船舶位置线——在海图 上 从 物 标 M 按 TB 画 出 方位线 (如图) 。 NT TB=131° M
end
天津海运职业学院航海教研室 退出
1)近距离船测岸方位位置线
船上的测者观测灯塔 TB=310 °。 求船舶 位置线 这是由船上的测者观 测 物 标 M 的 TB 得 到 的位置线 在海图上从物标 M按 TB 的 反 方 向 画 出 方 位线(如图) 。 end
天津海运职业学院航海教研室 退出
第三章 船舶定位
第一节 位置线与船位线 第二节 陆标的识别和方位距离的测定法 第三节 方位定位 第四节 距离定位 第五节 距离方位定位 第六节 移线定位
退出
§第一节 位置线与船位线
一、位置线 二、航海上常用的位置线 三、船位线
天津海运职业学院航海教研室
退出
一、位置线
1)位置线的定义
几何学上,与定点保持等值的动点轨迹称等值线。 航海上,船舶观测某一定点(或被某一定点观测)得到一观 测值U,则与该定点保持U观测值的动点轨迹称船舶位置线 定义 位置线 (line of position , LOP)—— 在航海定位中,符合某 一观测值的等值线(即在地球面(海图)上保持相等观测值 的动点轨迹)。
第六章船舶定位
▲
六分仪测角原理
天文定位原理
Z=90-h
▲
四、无线电定位
1. 雷达系统 2. 双曲线定位系统 3. GPS定位系统 4. 船舶自动识别系统AIS
▲
1. 雷达(Radar)系统
(1)基本原理 利用超高频(波长3cm——X波段、10cm——S波
段)直线、等速传播特性,通过对从天线发射脉冲波 到接受物标反射波的计时,实现对物标测距;通过天 线的定向发射和接受,实现对物标的测向。
已被
覆盖全球 夜间 2’
淘汰
▲
3. GPS定位系统
“导航卫星全球定位系统”(Navstar Global Positioning System),简称GPS系统。 (1) 概述 (2) 定位原理 (3) 差分GPS —— DGPS
▲
3. GPS定位系统
(1)概述 “子午仪”卫导系统概述: 不连续,平面定位(精度0.1~0.3’),97年停用。 GPS卫导系统概述: 特点:能提供全球、全天候、高精度、连续、近于 实时的三维定位与导航。 GPS定位精度:P码定位精度 < 1 m(军用); CA码定位精度 < 100m(民用)。 GLONASS和“伽利略计划”卫导系统概述
▲
第三节 航海日志(Log book)
一、填写内容
包括:航行、气象、海况、水舱测量、中午统计、船舶
装卸、停泊与修理以及重大记事。
方位(XXX)
二、填写要求
如:A物标航向是 ……
1. 使用钢笔按时间和页码顺序连续填写;
2. 填写使用统一符号和缩写,应填直接测定的原始数据;
3. 对填写错误,应用红钢笔在错字上划横后在其附近作改 正,并由改正人在其后加括号签名;
001坐标方向距离(航海概论)
航海基础
船舶在汪洋大海上航行, 船舶在汪洋大海上航行,如 何知道从海洋的此岸到彼岸 有多远? 有多远?
航海基础
要回答以上三个问题, 要回答以上三个问题,就要 知道航海的基础知识! 知道航海的基础知识! 船位 航向 航程
坐标、方向和距离
第一节 地球形状与地理坐标 第二节 航向与方位 第三节 能见地平距离和物标能见距离 第四节 航速与航程
0 22 0
罗经点法
四个基点 四个隅点 八个三字点 十六个偏点: N/E、N/W、 NE/N、NE/E、 E/N、E/S、 SE/E、SE/S等。
31 0
N
N/E N N E NE N /N E
0 32
260 270 280 290 30 0
330
3 340
50 0 10 20
30
40 5 50
0 60
(END)
大地球体
概述:
研究坐标、方向和距离等建立在一定形状的地球表面⇒地球的形 状; 地球自然表面高低不平、非常复杂⇒难以用数学公式描述; 珠穆朗玛峰8848 m,仅为地球半径(6367KM)的千分之一; 可以用占地球表面约71%的海水面来描述地球形状。 水准面:地球上任意一点的水准面就是通过该点且与该点的铅垂 线垂直的平面。 大地水准面:设想一个与平均海面相吻合的水准面,并将其向陆 地延伸,且保持该延伸面始终与当地的铅垂线相垂直,这样所形成 的连续不断的、光滑的闭合水准面,叫作大地水准面。 大地球体:大地水准面所包围的几何体称为大地球体。航海学中 所研究的地球形状就是指大地球体的地球形状。(END)
E
度量
自格林子午线 向东或向西度量到 该点子午线;度量 范围0°-180°; 向东度量称为东经 (E);向西度量为 西经(W)。(END)
001坐标方向距离(航海概论)
0
10 2 0
30
40 50
N
60
N
E
N W
W
80 90 100 1 1 0 70 12 0 1 30
E
SW
SE
S
0 14
170 160 150
180 190 2 0 0 21 0 2 20
罗经点法
60 270 280 290 50 2 2 30 03 240 10 0 23
SSW
四个基点 四个隅点 八个三字点: NNE、ENE、 ESE、SSE、 SSW、WSW、 WNW、NNW
地轴
地极 子午圈
G Q O Q' PN
子午线/
经线 格林子午线 赤道
赤道 格林经线 PS
地球上基本的点、线、圈
地轴
地极 子午圈
A G Q O PN 纬度圈 A'
子午线/
经线 格林子午线 赤道 纬度圈(END)
Q'
赤道 格林经线 PS
地理坐标
简介: 地理坐标是建立在地 球椭圆体表面上的。 地球椭圆体表面上的 任意一点的位置,可 Q 以用地理坐标,即地 理纬度和地理经度来 确定。航海上船舶的 位置和物标的位置都 是由地理坐标来表示。 地理坐标的基准线是 赤道、格林子午线。
0 32
50 0 40 3 3 330
N
10 2 0
30
40 50
NN E
N
E
W NN
60
WN W
W
WS W
SW
0 14
170 160 150
180 190 2 0 0 21 0 2 20
航海概论
船舶: 指能航行或停泊于水域进行水上运输或作业工具客船(货客船、客班船)用于运送旅客及其携带行李的船舶。
载客超过12人液化气体船:专用语运载液化石油气、液化天然气、液化化学气的船舶。
集装箱运输的优点:装卸效率高、降低劳动强度、减少货损货差、便于开展多式联运、型长(船长):指在夏季载重线上自船首柱前缘至船尾柱后缘的水平距离(两垂线间长)。
没有尾柱的船舶量至船杆中心。
满载排水量:指船舶的吃水达到规定的满载水线(常指夏季载重线)时的排水量。
总吨位:是指船舶所有围蔽处所的总容积,按丈量公约或规范规定的测算公式求出的船舶容积吨位。
净吨位:指船舶各载货处所的总容积按丈量公约或规范规定的测算公式求出的船舶容积吨位隐性:指船舶在外力距(风、浪~)的作用下发生倾斜,当外力距消除后能自行恢复到原来平衡位置的能力抗沉性:船舶在一个舱或几个舱进水的情况下,仍能保持不沉没和倾覆的能力船舶快速性:船舶在主机输出功率一定下,尽量提高船速的能力远洋船多采用球鼻船首型,通过调整船长,达到减少兴波阻力的目的。
船速越快,兴波阻力越大。
船舶摇摆性:船舶在外力的影响下,做周期性的横纵向摇摆和偏荡运动的性能船舶操纵性:船舶能保持和改变运动状态的能力。
其性能的提高主要通过车和舵来实现,但在靠离泊作业时,还通过锚、缆和拖轮来协助,地面上某一点的地理纬度为地球椭圆体子午线上该点的法线与赤道面的夹角。
海里; 等于地球椭圆子午线上纬度1‘分的弧长。
一海里= 1852 m 赤道最短,两极最长中国海区水上助航标志:侧面标志、方位标志、孤立危险物标志、安全水域标志、专用标志锋:冷锋、暖锋、准静止锋、囚锋。
划分依据:移动中冷暖锋所占的主次地位热带气旋名称和等级名称: 1, 热带低压TD2,热带风暴TS3,强热带风暴STS4,台风T (外圈、中圈、眼区)热带气旋的生命史: 1,形成期2,发展期3成熟期4衰亡期台风部位划分:眼睛顺着台风移动的方向往前看,把台风分成两部分,1,在北半球,其右边半圆叫做危险半圆,左边半圆叫做可航半圆; 2 在南半球,其右边半圆叫可航半圆,左边半圆叫危险半圆。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
距离定位
概念 距离测定
利用雷达测定距离 测垂直角求距离 灯塔初隐/初显距离
距离定位
(END)
测垂直角求距离
公式
D=H/(1852×tgα) =1.856×H/α’ 海里 (END)
距离定位
观测船位的确定: 观测船位的确定:
靠近EP附近的一交点; 靠近 附近的一交点; 附近的一交点 根据观测时的相对方位 确定; 确定; 根据船位点与航迹分布 情况判断。 情况判断。
同时观测两个天体就可以得到两个天文船位圆, 同时观测两个天体就可以得到两个天文船位圆,两个 天文船位圆交于两点, 天文船位圆交于两点,靠近推算船位的一点即天文观测船 位。
Ⅰ
+C
Ⅰ PG1 PG2
观测天体定位
天体在空 中的位置 圆心 天文船位圆 半径 六分仪 测得天体与水天 线之间垂直夹角 天体定位 天球坐标系 天体视运动 时间系统 船位线 高度差法 天体计算高度
(END)
航迹推算类型 海图作业基本训练
(END)
航迹计算(应用时机)
小比例尺海图作业补充; 狭水道、渔区进行变向、变速航行时; 起航点、到达点不在同一海图上,航用 海图不敷应用时; 船舶驾驶自动化。
(END)
航迹计算(类型)
类型1:
( ϕ 1 , λ1 )、C、S -> (ϕ 2 , λ 2)
区:1h一次,其它航区:2h4h一次
(END)
航迹推算
船舶定位方法 航迹推算
概念 意义 有关规定
TC、SL、风流 ⇒ CG、EP CA、SL、风流⇒TC、EP
(END)
航迹推算类型
航迹推算
船舶定位方法 航迹推算
概念 意义 有关规定 海图作业工具: 基本操作:
量取某点的经纬度 根据经纬度标绘某点 量取物标TB、Dist. 由已知点绘画方位线,在 其上截取距离求取经纬度
类型2:
( ϕ 1 , λ1 )、(ϕ 2 , λ 2 ) -> C、S
(END)
航迹计算(中分纬度法原理)
纬差Dϕ与东西距Dep dϕ = dScosC dw = dSsinC Dϕ = ScosC Dep = SsinC 东西距与经差Dλ DepA>Dep>DepB Depn=Dep=Dλcosϕn 得:Dλ=DepSecϕn
适用范围:同半球、纬度不高、航程不长。
(END)
航迹计算(墨卡托航法)
公式:
Dϕ = ScosC Dλ = DMPtgC
D Dep DMP D S C A
B
适用范围:
除东西向航行外所有 情况。
(END)
陆标定位
陆标识别 方位定位(两方位定位、三方位定位) 距离定位 方位距离定位 移线定位
(END)
航迹推算
船舶定位方法 航迹推算
概念 意义 任意时间、任意情况下求 取船位的基本方法 驾驶员了解船舶航行的连 续轨迹 陆标定位、天文定位、无 线电定位基础
(END)
航迹推算
船舶定位方法 航迹推算
概念 意义 有关规定 开始:“准确船位” 终止: 连续推算: 中止:“进入狭水道、渔区” ΔP较大时:“船长” 时间:沿岸水流影响显著航
GPS定位 GPS定位
24颗GPS卫星在离地面1 24颗GPS卫星在离地面1万2千公里的高空上, 卫星在离地面 千公里的高空上, 12小时的周期环绕地球运行 使得在任意时刻, 小时的周期环绕地球运行, 以12小时的周期环绕地球运行,使得在任意时刻, 在地面上的任意一点都可以同时观测到4颗以上的 在地面上的任意一点都可以同时观测到4 卫星。 卫星。 由于卫星的位置精确可知, GPS观测中 观测中, 由于卫星的位置精确可知,在GPS观测中,我 们可得到卫星到接收机的距离, 们可得到卫星到接收机的距离,利用三维坐标中 的距离公式,利用3颗卫星,就可以组成3 的距离公式,利用3颗卫星,就可以组成3个方程 解出观测点的位置(X,Y,Z) (X,Y,Z)。 式,解出观测点的位置(X,Y,Z)。考虑到卫星的时 钟与接收机时钟之间的误差,实际上有4个未知数, 钟与接收机时钟之间的误差,实际上有4个未知数, 和钟差,因而需要引入第4颗卫星,形成4 X、Y、Z和钟差,因而需要引入第4颗卫星,形成4 个方程式进行求解, 个方程式进行求解,从而得到观测点的经纬度和 高程。 高程。
双曲线定位
根据双曲线几何原理
GPS定位 GPS定位
全球定位系统(GPS)是本世纪 年代由美国 是本世纪70年代由美国 全球定位系统 是本世纪 陆海空三军联合研制的新一代空间卫星导航定位 其主要目的是为陆、 系统 。其主要目的是为陆、海、空三大领域提供 实时、 全天候和全球性的导航服务, 实时、 全天候和全球性的导航服务,并用于情报 收集、核爆监测和应急通讯等一些军事目的, 收集、核爆监测和应急通讯等一些军事目的,是 美国独霸全球战略的重要组成。经过20余年的研 美国独霸全球战略的重要组成。经过 余年的研 究实验,耗资300亿美元,到1994年3月,全球覆 亿美元, 究实验,耗资 亿美元 年 月 盖率高达98%的24颗GPS卫星星座己布设完成。 的 颗 卫星星座己布设完成。 盖率高达 卫星星座己布设完成
天体真高度 天体观测高度
天体定位 天文船位圆 圆心 天体地理位置 天体位置 半径 天体真高度 天体观测高度
船位线
天体计算高度
}
高度差
天体定位
测定天体定位方法 白天太阳移线定位 低纬度海区太阳特大高度定位 观测太阳、金星定位 晨昏星体定位
无线电定位
雷达定位 无线电测向定位 双曲线定位 GPS定位 GPS定位
两方位定位
概念:利用罗经观测两个或两个以上陆 标的方位来确定船位的方法和过程称为 方位定位。 定位方法
(END)
两方位定位方法
注意:在实际观测中, 仅进行两物标方位观测 不可能“同时”,因此 他们的交点只能认为观 测方位时刻的最概率船 位。(END)
三方位定位
三方位定位特点:
简单直观 可以判断OP的准确性
雷达定位
雷达定位: 雷达定位:利用雷达测量目标的方位或距 然后进行定位的方法。 离,然后进行定位的方法。
雷达定位方法
1、单物标方位、距离定位; 单物标方位、距离定位; 两个或两个以上距离定位; 2、两个或两个以上距离定位; 两个或两个以上方位定位; 3、两个或两个以上方位定位; 三物标; 4、三物标; 混合定位。 5、混合定位。
方位、距离得到相应的观测值,以该观测值为变 方位、距离得到相应的观测值, 量所作的点的几何轨迹。 量所作的点的画出在推 船位线:在船舶定位中,
算船位附近的一小段位置线来用于定位, 算船位附近的一小段位置线来用于定位,这一小 段位置线称为船位线。 段位置线称为船位线。
陆标识别
陆标:海图上标有准确位置可供目测或雷达观 测,用以导航或定位的陆上固定物标的统称。 孤立、显著物标: 利用物标形状、颜色、灯质、 利用物标形状、颜色、灯质、相对位置关系等 识别。 识别。 利用对景图识别 :航用海图或《航路指南》 利用等高线识别
(END)
利用等高线识别
船舶定位
基本概念 位置线:在船上, 位置线:在船上,测者用航海仪器观测物标的
移线定位
概念 位置线转移方法(直线位置线转移方法、
圆弧位置线转移方法、折线位置线转移方法)
单标方位移线定位
移线定位方法
有准确船位后的单标方位移线定位 特殊移线定位
(四点方位法、倍角法、特殊角法)
(END)
单标两方位移线定位方法
移线定位方法:
将T1时刻的位置线P1 转移到T2时刻P1’, P1’和T2时刻的位置线 P2的交点为T2时刻的 移线船位。
代号:RuF
(END)
直线位置线转移方法
原理:位置线具有时间性 转移方法
在P上任取一点A(通常为P 与CA或CG线的交点); 自A画CA或CG线的平行线, 并截取A’点,使AA’=S; 过A’作P的平行线P’,即为T2 时刻的转移位置线。
(END)
圆弧位置线的转移
原理:转移圆心。 方法:
自物标M起,画CA或CG 线的平行线,并截取M’ 点,使:MM’=S; 以M’为圆心、D为半径画 圆弧即为T2时刻的转移 位置线。
(END)
PN B' bn-1 an-2 G b2 b3 C a3 A' Q' H B an-1
Q
dw b1 d C a ds 2 A C a1
E
F
航迹计算(公式)
中分纬度ϕn 航迹计算公式:
Dϕ = ScosC Dλ = Depsecϕn = SsinCsecϕn 当航行纬度不高,且航程不很长时,可用平 均纬度ϕm代替中分纬度ϕn ,即: Dϕ = ScosC Dλ = Depsecϕn = SsinCsecϕm
航海学(船舶定位) 船舶定位)
广东海洋大学 航海学院 航海教研室
船位确定
推 算 船 位
船 位 确 定
观 测
定 位
无风流、有风无流、 无风流、有风无流、 航迹绘算 有流无风、 有流无风、有风流 航迹计算 方位定位、 方位定位、距离定位 陆标定位 移线定位、 移线定位、综合定位 天文定位 雷达、测向、罗兰、 无线电定位 雷达、测向、罗兰、GPS
方位距离定位
概念:观测视界内仅有一个可观测物标的方
位和距离确定船位方法和过程。
特点:
位置线交角始终等于90°; 简单、迅速,不需要进行移线定位。
(END)
方位距离定位
常用方法: 常用方法: 雷达观测距离方位定位; 雷达观测距离方位定位; 利用初隐( 利用初隐(显)距离和罗 经方位定位; 经方位定位; 利用六分仪垂直角测距和 罗经方位定位( 罗经方位定位(精度最 高); 利用测深确定物标距离和 罗经方位定位。 罗经方位定位。