加工中心斗笠式刀库.ppt
斗笠刀库解析

斗笠式刀库的动作过程斗笠式刀库在换刀时整个刀库向主轴平行移动。
(1)还刀取下主轴上原有刀具,当主轴上的刀具进入刀库的卡槽时,主轴向上移动脱离刀具。
(2)抓刀刀库转动,当目标刀具位于主轴正下方时,主轴下移,使刀具进入主轴锥孔内,刀具夹紧后,刀库退回原来的位置,换刀结束。
斗笠式刀库换刀过程动作图PMC和NC程序的配合PMC在整个换刀过程中主要控制刀库的正反转、刀库的前进后退、松刀紧刀阀动作。
NC程序控制主轴的上升和下降、主轴定位。
N19 M99:9001 (参数6071)N1 IF[#1000EQ1]GOTO19 (T CODE=SP TOOL) T代码等于主轴刀号,结束N2 #199=#4003 ( G90/G91 MODLE)N3 #198=#4006 (G20/21 MDOLE) 保留之前的模态信息N4 IF[#1002EQ1]GOTO7 ( SP TOOL=0) 主轴无刀,直接抓刀N5 G21G91G30P2Z0M19 回第2参考点,M19定向,准备还刀N6 GOTO8N7 G21G91G28Z0M19 回第1参考点,M19定向,准备抓刀N8 M50 刀库准备好(使能)N9 M52 刀库靠近主轴N10 M53 松刀吹气N11 G91G28Z0 回第一参考点N12 IF[#1001EQ1]GOTO15 (T CODE=0) 如果指令T0,则无需抓刀N13 M54 刀盘旋转G04X3.0N14 G91G30P2Z0 回第二参考点N15 M55 刀具卡紧N16 M56 刀盘远离主轴N17 M51 旋转结束N18 G#199G#198 恢复模态M代码含义M50刀库旋转使能M51刀库旋转结束M52刀库向右(靠近主轴)M53松刀,吹气M54刀盘旋转M55刀具夹紧M56刀盘向左(远离主轴)宏变量定义宏程序中,利用#1000-#2000宏变量对应PMC信号G54的相应位,可直接和PMC 进行联系,极大的方便了处理。
828d斗笠式刀库操作手册

斗笠式刀库操作说明本操作说明分为调试操作说明、维修操作说明、用户操作说明三部分;有需要可直接翻看某一部分。
目录1 调试操作说明 (2)1.1 设置机床参数 (2)1.2 刀库表初始化 (3)1.3 编写并激活、调用PLC (4)1.3.1 编写PLC (4)1.3.2 编译下载PLC (6)1.3.3 PLC激活 (6)1.4 刀具表操作 (6)1.4.1 新建刀具 (6)1.4.2 装载刀具 (7)1.4.3 卸载刀具 (8)1.4.4 刀具移位 (8)1.4.5 大小刀建立 (9)1.4.6 新刀沿建立 (9)1.5 动作调试 (9)1.5.1 激活刀库调试模式: (9)1.5.2 刀库信号测试: (9)1.5.3 换刀点调整: (10)1.5.4 关闭刀库调试模式 (10)1.5.5 测试连续动作 (10)2 维修操作说明 (10)2.1 换刀中故障,中止 (11)2.2 换刀时,断电、急停或复位 (11)3 用户操作说明 (12)3.1 刀具表操作 (12)3.1.1 新建刀具 (12)3.1.2 装载刀具 (12)3.1.3 卸载刀具 (13)3.1.4 刀具移位 (13)3.1.5 大小刀建立 (14)3.1.6 新刀沿建立 (14)3.2 换刀操作 (15)1 调试操作说明1.1 设置机床参数 快捷操作按钮示意图:点击“菜单键”——“调试”——进入参数设置界面:按照下表设置参数,可使用右边栏“搜索”软按键在各区域直接查找参数编号,如: 在“通用机床数据”界面,点击“搜索”输入“14510”,即可直接搜索到对应参数菜单程序管理加工 程序 参数诊断注:使用刀具名称编程时(如T=“MILL8”),不要设置MD52270_bit7;1.2刀库表初始化参数设置完成后,即可“执行”样例包中“刀库调试”——“换刀子程序”中的“MAG_CONF.SPF”,初始化刀具表(可以在U盘中直接点击“执行”键外部执行;也可拷贝文件至“程序”界面下,执行)U盘中直接点击“执行”拷贝文件至“程序”界面下,执行点击“参数”可进入“刀具清单”界面,系统默认为20把刀位带机械手的刀库;刀具表刷新前(默认)状态刀具表刷新后1.3 编写并激活、调用PLC1.3.1 编写PLC在PLC 主程序OB1模块,网络17,斗笠式刀库子程序TM_DSK_CHANGE(SBR35)模块调用中,按照对应说明填写对应信号点,如下图所示:(详见《PLC 子程序说明》)详细信号说明如下: 示例中:刀盘带有零位信号,故REF_Type=1;数刀信号为低电平,Counter_Type=0;注:如刀盘无零位信号,REF_Type =0;则零位信号I1.5使用空位DB9063.DBX0.0填补;不允许空位不填;信号说明一览表注:MAG_Sure_K(刀具表确认按键)用于在换刀中断或手动更改刀具后,再次换刀前对刀具表与实际刀库是否一致的确认。
加工中心斗笠式刀库 ppt课件
加工中心斗笠式刀库
• 1.9 • 主轴沿下移到Z轴的第二参考点位置,进行抓刀动作。
• 1.10 • 主轴刀具加紧。加紧传感器(D)发出确认信号。
• 1.11 • 刀库向远离主轴中心位置侧平移,直到PLC接收到传感器A • 发出的反馈确认信号。
• 1.12 • 主轴定位解除,换刀操作完成。刀库仅有以上四个传感器是不够的,为了保
• • (4) • 夹紧刀架电动机继续反转,此时涡轮停止转动,蜗杆轴3自身转动,当两端面
齿增加到一定夹紧力时,电动机1停止转动。译码装置由发信体13﹑14组成, 电刷13负责发信号,电刷14负责位置判断当刀架定位出现过位或不到位时, 可松开螺母12,调好发信体11与电刷14的相对位置。刀架在正向旋转的过程 中不停的对刀位输入信号进行检测,
1.运动系数
拨盘等速回转,在一个运动循环内,总的运 动时间为:
t=2π/ω1
槽轮的运动时间为:
td=2α1/ω1
定义: k=td / t 为运动系数,即:
ω2
k=td / t =2α1/2π
为减少冲击,进入或退出啮合时,槽中心线与 拨销中心连线成90°角。故有:
2α1=π-2φ2 =π-(2π/z)
二、槽轮机构的类型与应用
槽轮机构 类型
外啮合槽轮机构 内啮合槽轮机构 球面槽轮机构
轴线平行 轴线相交
应用实例: 电影放映机、 自动摄影机、六角车床转塔。
外啮合槽轮机构
ω1 2φ
ω2
内啮合槽轮机构
球面槽轮机构
车螺纹
4
3空闲 2车帽口
切尾 5
1 装牙膏筒
卸牙6膏筒
六槽内槽轮 圆销 拨盘
六角车床转塔
三、槽轮机构的运动系数及运动特性
链刀、盘式。斗笠式刀库
链式、盘式、斗笠刀库刀库系统是提供自动化加工过程中所需之储刀及换刀需求的一种装置;其自动换刀机构及可以储放多把刀具的刀库;改变了传统以人为主的生产方式。
藉由电脑程式的控制,可以完成各种不同的加工需求,如铣削、钻孔、搪孔、攻牙等。
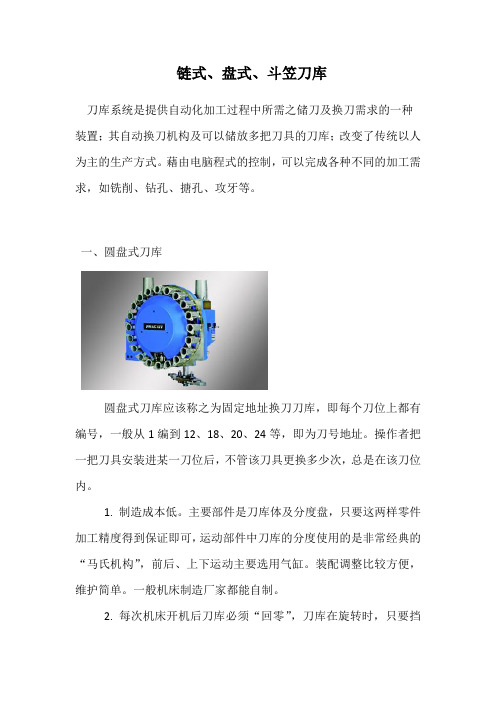
一、圆盘式刀库圆盘式刀库应该称之为固定地址换刀刀库,即每个刀位上都有编号,一般从1编到12、18、20、24等,即为刀号地址。
操作者把一把刀具安装进某一刀位后,不管该刀具更换多少次,总是在该刀位内。
1. 制造成本低。
主要部件是刀库体及分度盘,只要这两样零件加工精度得到保证即可,运动部件中刀库的分度使用的是非常经典的“马氏机构”,前后、上下运动主要选用气缸。
装配调整比较方便,维护简单。
一般机床制造厂家都能自制。
2. 每次机床开机后刀库必须“回零”,刀库在旋转时,只要挡板靠近(距离为0.3mm左右)无触点开关,数控系统就默认为1号刀。
并以此为计数基准,“马氏机构”转过几次,当前就是几号刀。
只要机床不关机,当前刀号就被记忆。
刀具更换时,一般按最近距离旋转原则,刀号编号按逆时针方向,如果刀库数量是18,当前刀号位8,要换6号刀,按最近距离换刀原则,刀库是逆时针转。
如要换10号刀,刀库是顺时针转。
机床关机后刀具记忆清零。
3. 固定地址换刀刀库换刀时间比较长国内的机床一般要8秒以上(从一次切削到另一次切削)。
4. 圆盘式刀库的总刀具数量受限制,不宜过多,一般40#刀柄的不超过24把,50#的不超过20把,大型龙门机床也有把圆盘转变为链式结构,刀具数量多达60把。
)圆盘刀库。
如图7.1(b)-(g)所示,存刀量少则6把-8把,多则50把-60把,有多种形式。
图7.1(b)所示刀库,刀具径向布置,占有较大空间,一般置于机床立柱上端。
图7.1(c)所示刀库,刀具轴向布置,常置于主轴侧面,刀库轴心线可垂直放置,也可以水平放置,较多使用。
图7.1(d)所示刀库,刀具为伞状布置,多斜放于立柱上端。
加工中心刀库分类特点及典型故障分析 ppt课件

⑸要注意保持刀具刀柄和刀套的清洁。 ⑹开机时,应先使刀库和机械手空运行,检查各部分工 作是否正常,特别是行程开关和电磁阀能否正常动作。检查 机械手液压系统的压力是否正常,刀具在机械手上锁紧是否 可靠,发现不正常时应及时处理。
17
ppt课件
2.2、机械手换刀方式
带机械手的刀库,换刀速度快,在零件程序运行的同时, 刀库可以将下一把刀具提前转到换刀位置。换刀指令生效后, 机械手将主轴刀套内的刀具与刀库换刀位置刀套内的目标刀具 直接交换。在整个换刀过程中对刀库冲击小, 带机械手的刀库增加了机械手的控制,因而相关的PLC应用程 序也相对复杂,机械手的控制方法因厂家不同,通常采用以下 几种控制方式:液压控制、异步电机控制、凸轮控制机械手
按换刀 方式划分
主轴直接 取刀方式
机械手 换刀方式
8
ppt课件
2.1、主轴直接取刀换刀方式
9
ppt课件 10
ppt课件 11
AB
ppt课件 Z2
12
ppt课件 13
ppt课件 14
ppt课件 15
ppt课件
电电机机 直线导轨
气缸
直线导轨
主轴
刀库刀盘
((aa))
((bb))
((dd))
39
ppt课件
(5)主轴系统有问题,刀具是靠碟簧通过拉杆和弹簧卡头而将刀具柄尾端 的拉钉拉紧的;松刀时,液压缸的活塞杆顶压顶杆,顶杆通过空心螺钉 推动拉杆,一方面使弹簧卡头松开刀具的拉钉,另一方面又顶动拉钉, 使刀具右移而在主轴锥孔中变“松”。
主轴系统不松刀的原因有以下5点: ①刀具尾部拉钉的长度不够,致使液压缸虽已运动到位,而仍未将刀具 顶“松”; ②拉杆尾部空心螺钉位置起了变化,使液磨损; ④弹簧卡头出故障,不能张开: ⑤主轴装配调整时,刀具移动量调得太小,致使在使用过程中一些综合 因素导致不能满足“松刀”条件。
BT40F斗笠式刀库说明书(台湾版)

B T4 0 - 16 F B 斗 笠 式 刀 庫
50
500
120
P向
常州市新墅机床数控设备有限公司 BT40-16FB斗笠式刀库
300
216.4
195.9
115
主 軸換 刀行 程
13
φ538
300
φ628
氣 缸換刀 行 程
241.5
500
377.5
191.5
6-M16-6H-30/25
P向
161.5
P向
11 0 . 5
113.4
115
主軸 換刀行 程
163
275
85
119
45
2 00 氣 缸換刀 行程
2 2 6 .3
410
φ 3 78 . 5
14 3
11
BT4 0-1 2FA 斗笠 式刀 庫
48
453
15 0
95
常州市新墅机床数控设备有限公司 BT40-12FA斗笠式刀库
240
1 13 . 9
17 6. 5
1 15
主 軸換 刀 行 程
12
1 7 .5
2 5 4. 5
φ 43 6
450 27 7
25 0 氣缸換刀行程
1 91
φ 54 1 .4
6- M 12 - 6H - 25 / 20
P向
13 2 .5
7 7. 5
16
3 70
1 15
45
1 80
1 80
4 50
1 85
1 5 5± 0. 2
10
BT40-10F 斗笠式刀庫
10
BT40-12FA 斗笠式刀庫
加工中心斗笠式刀库25页PPT
6
、
露
凝
无
游
氛
,
天
高
风
景
澈
。
7、翩翩新 来燕,双双入我庐 ,先巢故尚在,相 将还旧居。
8
、
吁
嗟
身
后
名
,
于
我
若
浮
烟
。
ห้องสมุดไป่ตู้
9、 陶渊 明( 约 365年 —427年 ),字 元亮, (又 一说名 潜,字 渊明 )号五 柳先生 ,私 谥“靖 节”, 东晋 末期南 朝宋初 期诗 人、文 学家、 辞赋 家、散
▪
29、勇猛、大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
25
1
0
、
倚
南
窗
以
寄
傲
,
审
容
膝
之
易
安
。
▪
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者不如乐之者。——孔子
文 家 。汉 族 ,东 晋 浔阳 柴桑 人 (今 江西 九江 ) 。曾 做过 几 年小 官, 后辞 官 回家 ,从 此 隐居 ,田 园生 活 是陶 渊明 诗 的主 要题 材, 相 关作 品有 《饮 酒 》 、 《 归 园 田 居 》 、 《 桃花 源 记 》 、 《 五 柳先 生 传 》 、 《 归 去来 兮 辞 》 等 。
斗笠式刀库位置的调整及参数的设定

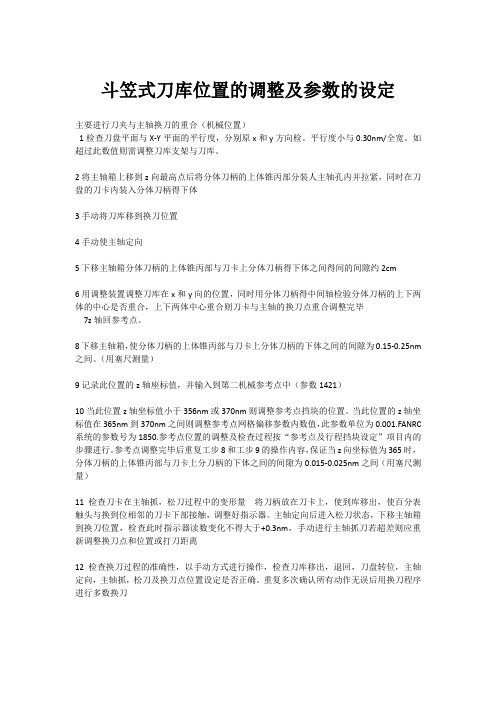
斗笠式刀库位置的调整及参数的设定斗笠式刀库位置的调整及参数的设定主要进行刀夹与主轴换刀的重合(机械位置)1检查刀盘平面与X-Y平面的平行度,分别原x和y方向检。
平行度小与0.30nm/全宽。
如超过此数值则需调整刀库支架与刀库。
2将主轴箱上移到z向最高点后将分体刀柄的上体锥丙部分装人主轴孔内并拉紧,同时在刀盘的刀卡内装入分体刀柄得下体3手动将刀库移到换刀位置4手动使主轴定向5下移主轴箱分体刀柄的上体锥丙部与刀卡上分体刀柄得下体之间得间的间隙约2cm6用调整装置调整刀库在x和y向的位置,同时用分体刀柄得中间轴检验分体刀柄的上下两体的中心是否重合,上下两体中心重合则刀卡与主轴的换刀点重合调整完毕7z轴回参考点。
8下移主轴箱,使分体刀柄的上体锥丙部与刀卡上分体刀柄的下体之间的间隙为0.15-0.25nm 之间。
(用塞尺测量)9记录此位置的z轴座标值,并输入到第二机械参考点中(参数1421)10当此位置z轴坐标值小于356nm或370nm则调整参考点挡块的位置。
当此位置的z轴坐标值在365nm到370nm之间则调整参考点网格偏移参数内数值,此参数单位为0.001.FANRC 系统的参数号为1850.参考点位置的调整及检查过程按“参考点及行程挡块设定”项目内的步骤进行。
参考点调整完毕后重复工步8和工步9的操作内容,保证当z向坐标值为365时,分体刀柄的上体锥丙部与刀卡上分刀柄的下体之间的间隙为0.015-0.025nm之间(用塞尺测量)11检查刀卡在主轴抓,松刀过程中的变形量将刀柄放在刀卡上,使到库移出,使百分表触头与换到位相邻的刀卡下部接触,调整好指示器。
主轴定向后进入松刀状态,下移主轴箱到换刀位置,检查此时指示器读数变化不得大于+0.3nm,手动进行主轴抓刀若超差则应重新调整换刀点和位置或打刀距离12检查换刀过程的准确性,以手动方式进行操作,检查刀库移出,退回,刀盘转位,主轴定向,主轴抓,松刀及换刀点位置设定是否正确。
加工中心斗笠式刀库

槽轮机构(马尔它机构)
一、槽轮机构的组成及其工作特点 组成:带圆销的拨盘、带有径向槽的槽轮。 拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘 上的凸圆弧,起锁定作用。
拨盘 圆销
ω1
锁止弧
o1
工作过程:拨盘连续回转,当两锁止弧接触时, 槽轮静止;反之槽轮运动。
作用:将连续回转变换为间歇转动。
o2
槽轮
ω2
• •
• • • • • • • • •
1.4 刀库平行向主轴位置移动。刀库刀具中心和主轴中心线在一条直线上时为换 刀位置,位置到达通过信号传感器(B)反馈信号到数控系统PLC进行确认。 1.5 主轴向下移动到刀具交换位置。一般刀具交换位置定义为Z轴的第二参考点, 在此位置将当前主轴上的刀具还回到刀库中。 1.6 刀库抓刀确认后,主轴吹气松刀。机床在主轴部分安装松刀确认传感器 (C),数控机床PLC接收到传感器C发送的反馈信号后,确认本步动作执行 完成,允许下一步动作 开始。 1.7 主轴抬起到Z轴第一参考点位置。此操作目的是防止刀库转动时,刀库和主 轴发生干涉。 1.8 刀库旋转使能。数控系统发出刀库电机正/反转启动信号,启动刀库电机的转 动,找到指令要求更换的目标刀具,并使此刀具位置的中心与主轴中心在一 条直线上。
∴ 槽轮的槽数 z≥3
可知:当只有一个圆销时,k=1/2-1/z < 0.5 即槽轮的运动时间总是小于其静止时间。 如果想得到k≥0.5的槽轮机构,则可在拨盘上多装几个圆销,设装有n个均匀 分布的圆销,则拨盘转一圈,槽轮被拨动n次。故运动系数是单圆柱销的n倍, 即:
k=n(1/2-1/z) ∵ k≤1 得:n≤2z/ (z -2)
• •
(3) 刀架定位刀架体7转动时带动着电刷座10转动,当转到程序指定的刀号时,粗 定位销15在弹簧力的作用下进入粗位盘6的槽中进行粗定位,同时电刷13接 触导体使电动机1翻转。由于粗定位槽的限制,刀架体7不能转动,使其在该 位置垂直落下,刀架体7和刀架底座5上的端面齿啮合实现精确定位。
加工中心刀库控制与管理ppt课件
切削到另一次切削)。
18
刀库的电气连接
由右图可知,刀库的控 制执行机构主要有刀库 电机、松刀电磁阀、刀 库推出电磁阀等。这些 执行器件的控制均由 PLC来实现。PLC通过 控制总线接收到数控系 统发出的指令。并与IO 接口读取到的控制对象 状态相比较,实时输出 控制指令。
19
谢谢!
20
主轴准停装置 机床的切削转矩由主轴上的端面键来传递,每次机械手自动装 取刀具时,必须保证刀柄上的键槽对准主轴端面键,这就要求主轴具有准确 定位的功能。为满足主轴这一功能而设计的装置称为主轴准停装置或称为主 轴定向装置。主轴要求准停的另一原因是便于在镗完内孔后能正确的退刀。 目前主轴准停装置主要有机械方式和电气方式两种。
13
换刀过程控制原理(1): 在自动换刀过程中,机械手要完成抓刀、 拔刀、交换主轴上和刀库上的刀具位置、 插刀、复位等动作。如前面介绍刀库结 构时所述,当刀套向下转90°后,压下 上行程位置开关,发出机械手抓刀信号。 此时,机械手21的手臂中心线与主轴中 心到换刀位置的刀具中心的连线成75° 位置,液压缸18右腔通压力油,活塞杆 推着齿条17向左移动,使得齿轮11转动。
刀具松开 机械手抓住主轴刀具的刀柄后,刀具的自动夹紧机构松开刀具。 械手拔刀 机械手下降,同时拔出两把刀具。 交换两刀具位置 机械手带着两把刀具逆时针转180°(从K向观察),使主轴刀具
与刀库刀具交换位置。 机械手插刀 机械手上升,分别把刀具插入主轴锥孔和刀套中。 刀具夹紧 刀具插入主轴锥孔后,刀具的自动夹紧机构夹紧刀具。 液压缸复位 驱动机械手逆时针转180°的液压缸复位,机械手无动作。 机械手逆转75° 机械手逆转75°,回到原始位置。 刀套上转90° 刀套带着刀具向上翻转90°,为下一次选刀做准备。
任务1-3加工中心刀库的安装优秀PPT课件
气缸 刀库左位CHE传NLI 感器 刀库右位传感14器
开关型霍尔传感器 永久磁铁 与换位电机同轴相连
CHENLI
15
CHENLI
16
红色棘轮与 伞状刀库同 轴相连
棘轮机构
CHENLI
白色主动轮 由电机驱动
17
实现电机每转一圈,刀库更换一个刀位
CHENLI
18
拉钉 刀柄
铣刀
CHENLI
19
松刀 、抓 刀气 缸
;气缸带动刀库缩回原位
M206
;激活刀具参数
MSG("换刀结束 新刀具号:T"<<$P_TOOLP) ;弹出对话框提醒操作者
GOTO F _END
_NO:
MSG("无换刀动作原因:编程刀具号=主轴刀具号") ;弹出对话框提醒操作者
_END:
CHENLI
62
CHENLI
63
CHENLI
64
将之前备份的Toolchange.spf恢复至,“CMA 机床制造 商循环”文件夹中。
右位传 感器
换刀位
CHENLI
41
第三步:电磁阀动作,气缸活塞缩回,左位传感器发 出有效信号,完成一个换刀的循环。
左位传 感器
CHENLI
42
本仿真斗笠式刀库有几个PLC的输入?几个PLC的输 出?
CHENLI
43
(二)802D SL输入输出的连接
CHENLI
44
PROFIBUS总 线输出端X6
CHENLI
50
CHENLI
51
三、任务计划
CHENLI
52
CHENLI
53
斗笠刀库使用说明

K1000M4_Cs_EXT斗笠刀库使用说明K1000M4_Cs_EXT斗笠刀库接口信号输入信号诊断表位号 7 6 5 4 3 2 1 0X0.7: 模拟主轴手动换档信号X0.5: X轴减速输入信号X0.4: 4轴分度头输入信号X0.3: 松拉刀开关信号X0.2: 复合功能:宏输入,4轴分度头输入信号X0.1: 复合功能:宏输入,4轴分度头输入信号X0.0: 复合功能:宏输入,4轴分度头输入信号位号 7 6 5 4 3 2 1 0X1.7: G31测量输入信号X1.6: 负向硬限位X1.5: Y轴减速输入信号X1.4: 正向硬限位X1.3: 宏输入X1.2: 主轴定位完成输入信号X1.1: 复合功能:宏输入,转台松开输入信号X1.0: 复合功能:宏输入,转台夹紧输入信号位号 7 6 5 4 3 2 1 0X2.7: 主轴报警信号输入X2.5: Z轴减速输入信号X2.4: 急停信号X2.3: 倍率开关输入信号X2.2: 倍率开关输入信号X2.1: 倍率开关输入信号X2.0: 倍率开关输入信号位号 7 6 5 4 3 2 1 0X3.7: 模拟主轴高档位反馈X3.6: 紧刀到位输入信号X3.5: 4轴减速输入信号X3.4:模拟主轴低档位反馈X3.3:ESP 急停X3.2: 暂停X3.1: 启动按钮X3.0: 程序开关位号 7 6 5 4 3 2 1 0X4.7: ESP 急停X4.6: 附加操作盒选择4轴X4.5: 附加操作盒选择Z轴X4.4: 附加操作盒选择Y轴X4.3: 附加操作盒选择X轴X4.2: 手轮脉冲当量X4.1: 手轮脉冲当量X4.0: 手轮脉冲当量位号 7 6 5 4 3 2 1 0X100.7: 模式切换输入信号X100.6: 松刀到位输入信号X100.5: 刀库拉回到位输入信号X100.4: 刀库伸出到位输入信号X100.3: 数刀输入信号X100.2: 刀库零位输入信号X100.1: 刀库手动反转输入信号X100.0: 刀库手动正转输入信号输出信号诊断表位号 7 6 5 4 3 2 1 0Y0.7: 主轴制动输出Y0.6: 报警输出Y0.5: 主轴停止Y0.4: 润滑油开Y0.3: 冷却液开输出Y0.2: 卡盘控制输出Y0.1: 主轴反转Y0.0: 主轴正转位号 7 6 5 4 3 2 1 0Y1.7: 加工完成Y1.6: 模拟主轴输出指示Y1.5: 手动/手轮/单步/回零方式指示信号Y1.4: 润滑油关脉冲输出Y1.3: 冷却液关脉冲输出Y1.2: M11脉冲输出Y1.1: 转台放松输出信号Y1.0: 转台夹紧输出信号位号 7 6 5 4 3 2 1 0Y2.7: 松刀输出信号Y2.6: 分度头气动放松输出Y2.5: 4轴驱动准备就绪输出Y2.4: 复合功能:主轴档位,宏输出Y2.3: 主轴定向输出Y2.2: 复合功能:主轴档位,宏输出Y2.1: 复合功能:主轴档位,宏输出,模拟主轴高档输出Y2.0: 复合功能:主轴档位,宏输出,模拟主轴低档输出位号 7 6 5 4 3 2 1 0Y100.4: 模式切换输出信号Y100.3: 刀库反转输出信号Y100.2: 刀库正转输出信号Y100.1: 刀库拉回输出信号Y100.0: 刀库伸出输出信号K1000M4_Cs_EXT斗笠刀库调试参数说明;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;PLC记忆型控制继电器信号定义;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;SKEY_K = K0.7 ;选择X3.0功能,1-程序开关MST_K = K0.6 ;禁止X3.1为循环启动开关,1-禁止,0-有效MSP_K = K0.5 ;禁止X3.2为暂停开关,1-禁止,0-有效MOT_K = K0.4 ;选择是否检查硬限位1:不检查MESP_K = K0.3 ;禁止急停功能,1-禁止,0-有效MESP3_K = K0.2 ;禁止X4.7为急停开关3,1-禁止,0-有效MESP2_K = K0.1 ;禁止X3.3为急停开关2,1-禁止,0-有效MESP1_K = K0.0 ;禁止X2.4为急停开关1,1-禁止,0-有效KEYI_K =K1.7 ;开机时程序开关状态1:为开0:为关ZDIL_K = K1.6 ;选择主轴制动时是否互锁进给轴TMANL_K = K1.5 ;T代码时手动换刀机能选择;1:有效,0:自动换刀SOLA_K = K1.4 ;松拉刀控制机能;1:有松拉刀控制机能,0:无松拉刀控制机能QJSL_K = K1.3 ;气动夹紧放松旋转分度头机能;1:有效,0:无效AGIN_K =K1.1 ;自动换档时,是否检查档位反馈信号;1:总是检查,0:出现新S时检查AGST_K =K1.0 ;自动换档时,是否需要手动参与;1:需要手工换档并且再次按下启动键MZRN4_K = K2.7 ;选择回零按键方向MZRNZ_K = K2.6 ;选择回零按键方向MZRNY_K = K2.5 ;选择回零按键方向MZRNX_K = K2.4 ;选择回零按键方向ZLOK_K = K2.3 ;选择回零按键自保持RH_AUTO_K = K2.1 ;选择自动润滑机能MNREM_K =K2.0 ;工件计数掉电保持功能1-保持0-不保持MPLS_K = K3.7 ;M代码脉冲输出SUOS_K = K3.6 ;选择宏输出功能1:S1-S8为宏输出,0:MNOUT_K =K3.5 ;选择工件计数到达输出机能TCKI_K =K4.7 ;选择刀位反馈信号检查MSTKY_K =K4.1 ;屏蔽面板按键,0:不屏蔽,1:屏蔽M19S_K =K4.0 ;主轴定向功能1:有效,0:无效MPWE_K =K5.6 ;参数开关屏蔽选择1;参数开关屏蔽0:不屏蔽参数开关TO_K =K5.5 ;选择是否有零位信号1:有零位信号0:无零位信号MT_CHK_K =K5.4 ;屏蔽到位一致检查1:屏蔽EHOF_K =K5.3 ;选择外部手轮时,面板手轮方式是否有效。
斗笠式刀库位置的调整及参数的设定
斗笠式刀库位置的调整及参数的设定主要进行刀夹与主轴换刀的重合(机械位置)1检查刀盘平面与X-Y平面的平行度,分别原x和y方向检。
平行度小与0.30nm/全宽。
如超过此数值则需调整刀库支架与刀库。
2将主轴箱上移到z向最高点后将分体刀柄的上体锥丙部分装人主轴孔内并拉紧,同时在刀盘的刀卡内装入分体刀柄得下体3手动将刀库移到换刀位置4手动使主轴定向5下移主轴箱分体刀柄的上体锥丙部与刀卡上分体刀柄得下体之间得间的间隙约2cm6用调整装置调整刀库在x和y向的位置,同时用分体刀柄得中间轴检验分体刀柄的上下两体的中心是否重合,上下两体中心重合则刀卡与主轴的换刀点重合调整完毕7z轴回参考点。
8下移主轴箱,使分体刀柄的上体锥丙部与刀卡上分体刀柄的下体之间的间隙为0.15-0.25nm 之间。
(用塞尺测量)9记录此位置的z轴座标值,并输入到第二机械参考点中(参数1421)10当此位置z轴坐标值小于356nm或370nm则调整参考点挡块的位置。
当此位置的z轴坐标值在365nm到370nm之间则调整参考点网格偏移参数内数值,此参数单位为0.001.FANRC 系统的参数号为1850.参考点位置的调整及检查过程按“参考点及行程挡块设定”项目内的步骤进行。
参考点调整完毕后重复工步8和工步9的操作内容,保证当z向坐标值为365时,分体刀柄的上体锥丙部与刀卡上分刀柄的下体之间的间隙为0.015-0.025nm之间(用塞尺测量)11检查刀卡在主轴抓,松刀过程中的变形量将刀柄放在刀卡上,使到库移出,使百分表触头与换到位相邻的刀卡下部接触,调整好指示器。
主轴定向后进入松刀状态,下移主轴箱到换刀位置,检查此时指示器读数变化不得大于+0.3nm,手动进行主轴抓刀若超差则应重新调整换刀点和位置或打刀距离12检查换刀过程的准确性,以手动方式进行操作,检查刀库移出,退回,刀盘转位,主轴定向,主轴抓,松刀及换刀点位置设定是否正确。
重复多次确认所有动作无误后用换刀程序进行多数换刀主轴定向角度调整及参数设定1.确认能够进行主轴定向(8135#4=0、主轴使用mzi传感器)2.将参数3117#1=1(1、2两项设置完毕后需要断电)3.手动旋转主轴使主轴定位块与刀杯定位块(或者机械手定位块)互相重合4.通过诊断参数445确认主轴位置数据5.将诊断参数445中的位置数据输入到参数4077中6.设定参数6071=6(使用M6调用O9001换刀宏程序)注意,在设定第二机械参考点之前要回参考点;在设定主轴定向角度之前需要运行一次主轴然后进行M19定向,看是否有位置数据常用换刀宏程序%O9001N1IF[#1000EQ1]GOTO19N2#199=#4003N3#198=#4006N4IF[#1002EQ1]GOTO7N5G21G91G30P2Z0M19N6GOTO8N7G21G91G28Z0M19N8M50N9M52N10M53N11G91G28Z0N12IF[#1001EQ1]GOTO15N13M54N14G91G30P2Z0N15M55N16M56N17M51N18G#199G#198N19M99%。
刀库产品基础认知.ppt

常用的接近開關是歐姆龍PNP的。 E.刀臂主要是鑄件,再由各個不同的小部件構成
• 圓盤式刀庫
四.刀庫特點 1)刀套採用複合工程塑料,強度高,重量輕,抗老化腐
• 打刀缸
三.常用配件 打刀缸在使用過程中出現的的各個問題,很多皆是配件的
問 題,如電磁閥、微動開關等。 四.打刀缸的特點 臻賞打刀缸品質穩定、技術純熟,並且在台灣市佔率有高
達
• 打刀缸
同行品牌的打刀缸 台灣品牌:尚品、豪澄 國內品牌:協品、和亞
謝謝學習 本課程完!
• 主軸
同品牌的主軸 台灣品牌:羅翌、普森、臺大、數格、建春 國產品牌:萊必泰 日本品牌:小松
• 打刀缸
一.打刀缸的型號 通常用的打刀缸是利用氣壓轉機械壓力的裝置。型號如: 3.5T/13L 、4.5T/13L、6T/15L 具體數據是:輸出壓力是3500Kg的打刀缸的行程是13mm。其 他同理。 二.打刀缸的構造 打刀缸原理是:氣壓進入缸體,推動活塞;再由活塞桿擠壓油壓
主軸的認知
• 主軸
二.主軸的構造 下圖由外及內我們可以看到,最外面的是主軸的外套筒,其內 是軸承和隔套,再次是主軸芯軸,在芯軸內是拉刀杆組。 外套筒:主要用於安裝、油冷、防護等作用 軸承:用於安裝芯軸,可做高速旋轉。隔套介於兩端軸承之間
起著固定軸承的作用 拉刀杆組:
• 主軸
三.主軸常用配件 軸承:由於主軸在加工的過程中會有鐵屑、粉塵等各個因
• 主軸
4.使用義大利GEMB電腦平衡校正機,平衡等級廠內要求G0.4 以內,以確保客戶在機臺上運作時可維持在平衡等級G1.0以內。 5.採用電腦控制全自動跑合程式。每一支出廠主軸均經過完整跑 合程式,縮短工具機廠於線上跑和時間,提升裝配效率。在恒 溫室經過跑合磨合測試後,主軸的溫升在無冷卻狀態下,均能 控制在15°以下。 6.接受客制化訂制,增加客戶獨特性,開發適合客戶的主軸,以
828d斗笠式刀库操作手册
斗笠式刀库操作说明本操作说明分为调试操作说明、维修操作说明、用户操作说明三部分;有需要可直接翻看某一部分。
目录1 调试操作说明 (2)1.1 设置机床参数 (2)1.2 刀库表初始化 (3)1.3 编写并激活、调用PLC (4)1.3.1 编写PLC (4)1.3.2 编译下载PLC (6)1.3.3 PLC激活 (6)1.4 刀具表操作 (6)1.4.1 新建刀具 (6)1.4.2 装载刀具 (7)1.4.3 卸载刀具 (8)1.4.4 刀具移位 (8)1.4.5 大小刀建立 (9)1.4.6 新刀沿建立 (9)1.5 动作调试 (9)1.5.1 激活刀库调试模式: (9)1.5.2 刀库信号测试: (9)1.5.3 换刀点调整: (10)1.5.4 关闭刀库调试模式 (10)1.5.5 测试连续动作 (10)2 维修操作说明 (10)2.1 换刀中故障,中止 (11)2.2 换刀时,断电、急停或复位 (11)3 用户操作说明 (12)3.1 刀具表操作 (12)3.1.1 新建刀具 (12)3.1.2 装载刀具 (12)3.1.3 卸载刀具 (13)3.1.4 刀具移位 (13)3.1.5 大小刀建立 (14)3.1.6 新刀沿建立 (14)3.2 换刀操作 (15)1 调试操作说明1.1 设置机床参数 快捷操作按钮示意图:点击“菜单键”——“调试”——进入参数设置界面:按照下表设置参数,可使用右边栏“搜索”软按键在各区域直接查找参数编号,如: 在“通用机床数据”界面,点击“搜索”输入“14510”,即可直接搜索到对应参数菜单程序管理加工 程序 参数诊断注:使用刀具名称编程时(如T=“MILL8”),不要设置MD52270_bit7;1.2刀库表初始化参数设置完成后,即可“执行”样例包中“刀库调试”——“换刀子程序”中的“MAG_CONF.SPF”,初始化刀具表(可以在U盘中直接点击“执行”键外部执行;也可拷贝文件至“程序”界面下,执行)U盘中直接点击“执行”拷贝文件至“程序”界面下,执行点击“参数”可进入“刀具清单”界面,系统默认为20把刀位带机械手的刀库;刀具表刷新前(默认)状态刀具表刷新后1.3 编写并激活、调用PLC1.3.1 编写PLC在PLC 主程序OB1模块,网络17,斗笠式刀库子程序TM_DSK_CHANGE(SBR35)模块调用中,按照对应说明填写对应信号点,如下图所示:(详见《PLC 子程序说明》)详细信号说明如下: 示例中:刀盘带有零位信号,故REF_Type=1;数刀信号为低电平,Counter_Type=0;注:如刀盘无零位信号,REF_Type =0;则零位信号I1.5使用空位DB9063.DBX0.0填补;不允许空位不填;信号说明一览表注:MAG_Sure_K(刀具表确认按键)用于在换刀中断或手动更改刀具后,再次换刀前对刀具表与实际刀库是否一致的确认。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 斗笠式刀库的分度装置是利用了外啮合槽轮机构能把主动轴的匀速连续运动 转换为从动轴的周期性间歇运动原理设计的一种分度转位机构。斗笠式刀库 选刀时,首先由刀库回转电机得到旋转指令,输入轴通过联轴器带动定位法 兰旋转,从而使在定位法兰上的圆柱滚子回绕法兰中心转动;当圆柱滚子转 动一定角度,进入分度盘的分度槽中,拨动分度盘开始作转位运动;当分度 盘转过一定的角度后,圆柱滚子从分度槽中脱出,刀库鼓轮盘(分度盘通过 螺钉与刀库鼓轮连在一起转动见图1)即静止不动,并由定位法兰的锁止半轴 定位。
1.运动系数
拨盘等速回转,在一个运动循环内,总的运 动时间为:
t=2π/ω1
槽轮的运动时间为:
td=2α1/ω1
定义: k=td / t 为运动系数,即:
ω2
k=td / t =2α1/2π
为减少冲击,进入或退出啮合时,槽中心线与 拨销中心连线成90°角。故有:
2α1=π-2φ2 =π-(2π/z)
• 斗笠式刀库具有结构简单、成本低、易于控制和维护方便等特点,因此在中 小型加工中心上得到了广泛的应用。但是,在我们使用中发现,往往会出现 乱刀现象,从而又引起撞刀。这对数控车床安全和精度构成极大的危险。
• 斗笠式刀库的工作原理:
• 斗笠式刀库的换刀时间为5~7秒
• 1.1
• 刀库处于正常状态,此时刀库停留在远离主轴中心的位置。此位置一 般安装有信号传感器(为了方便理解,定义为A),传感器A发送信 号输送到数控机床的PLC中,对刀库状态进行确认。
槽轮机构(马尔它机构)
一、槽轮机构的组成及其工作特点
拨盘 圆销
组成:带圆销的拨盘、带有径向槽的槽轮。
拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘 上的凸圆弧,起锁定作用。
ω1
o1
锁止弧
工作过程:拨盘连续回转,当两锁止弧接触时, 槽轮静止;反之槽轮运动。
作用:将连续回转变换为间歇转动。
槽轮
o2
ω2
特点:结构简单、制造容易、工作可靠、机械效率高,能平稳地、间歇地 进行转位。因槽轮运动过程中角速度有变化 ,不适合高速运动场合。
斗笠式刀库刀库的组成及工作原理
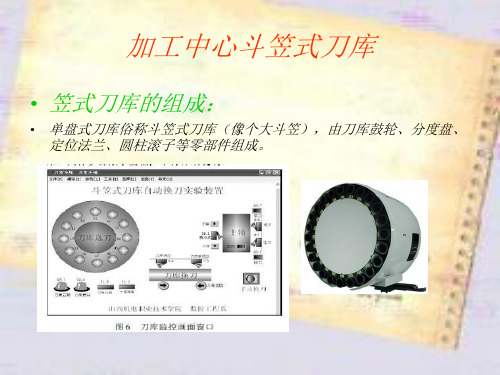
• 笠式刀库的组成:
• 单盘式刀库俗称斗笠式刀库(像个大斗笠),由刀库鼓轮、分度盘、 定位法兰、圆柱滚子等零部件组成。
• 一般只能存16~24 把刀具。1 斗笠式刀库的动作过程,斗笠式刀库 在换刀时整个刀库向主轴平行移动,首先,取下主轴上原有刀具,当 主轴上的刀具进入刀库的卡槽时,主轴向上移动脱离刀具其次主轴安 装新刀具这时刀库转动当目标刀具对正主轴正下方时,主轴下移,使 刀具进入主轴锥孔内,刀具夹紧后,刀库退回原来的位置,换刀结束。 刀库具体动作过程如下:
二、槽轮机构的类型与应用
槽轮机构 类型
外啮合槽轮机构 内啮合槽轮机构 球面槽轮机构
轴线平行 轴线相交
应用实例: 电影放映机、 自动摄影机、六角车床转塔。
外啮合槽轮机构
ω1 2φ
ω2
内啮合槽轮机构
球面槽轮机构
车螺纹
4
3空闲 2车帽口
切尾 5
1 装牙膏筒
卸牙6膏筒
六槽内槽轮 圆销 拨盘
六角车床转塔
三、槽轮机构的运动系数及运动特性
• 1.2
• 数控系统对指令的目标刀具号和当前主轴的刀具号进行分析。如果目 标刀具号和当前主轴刀具号一致,直接发出换刀完成信号。如果目标 刀具号和当前主轴刀具号不一致,
• 启动换刀程序,进入下一步。
• 1.3
• 主轴沿Z方向移动到安全位置。一般安全位置定义为Z轴第一参考点位 置,同时主轴完成定位动作,并保持定位状态;主轴定位常常通过检 测主轴所带的位置编码器一转信号来完成。
证数控机床的安全,保证刀库的换刀顺利完成,在斗笠式刀库中一般还安装 刀库转动到位确认传感器(E),保证刀库转动停止时,刀具中心线位置和主 轴中心线在一条直线上。不能太多,太多的话这个“斗笠”就太大了,放不 下了。这种斗笠式刀库在换刀时整个刀库向主轴移动。当主轴上的刀具进入 刀库的卡槽时,主轴向上移动脱离刀具,这时刀库转动。当要换的刀具对正 主轴正下方时主轴下移,使刀具进入主轴锥孔内,夹紧刀具后,刀库退置移动。刀库刀具中心和主轴中心线在一条直线上时为换
刀位置,位置到达通过信号传感器(B)反馈信号到数控系统PLC进行确认。 • 1.5 • 主轴向下移动到刀具交换位置。一般刀具交换位置定义为Z轴的第二参考点,
在此位置将当前主轴上的刀具还回到刀库中。
• 1.6 • 刀库抓刀确认后,主轴吹气松刀。机床在主轴部分安装松刀确认传感器
= 2π(z-2)/2z 代入上式
ω1
2α1 90° 90°2φ2
将2α1代入得: k =1/2-1/z
∵ k>0 ∴ 槽轮的槽数 z≥3 可知:当只有一个圆销时,k=1/2-1/z < 0.5 即槽轮的运动时间总是小于其静止时间。
如果想得到k≥0.5的槽轮机构,则可在拨盘上多装几个圆销,设装有n个均匀 分布的圆销,则拨盘转一圈,槽轮被拨动n次。故运动系数是单圆柱销的n倍, 即:
• 1.9 • 主轴沿下移到Z轴的第二参考点位置,进行抓刀动作。
• 1.10 • 主轴刀具加紧。加紧传感器(D)发出确认信号。
• 1.11 • 刀库向远离主轴中心位置侧平移,直到PLC接收到传感器A • 发出的反馈确认信号。
• 1.12 • 主轴定位解除,换刀操作完成。刀库仅有以上四个传感器是不够的,为了保
(C),数控机床PLC接收到传感器C发送的反馈信号后,确认本步动作执行 完成,允许下一步动作 • 开始。 • 1.7 • 主轴抬起到Z轴第一参考点位置。此操作目的是防止刀库转动时,刀库和主 轴发生干涉。
• 1.8 • 刀库旋转使能。数控系统发出刀库电机正/反转启动信号,启动刀库电机的转
动,找到指令要求更换的目标刀具,并使此刀具位置的中心与主轴中心在一 条直线上。
k=n(1/2-1/z)
∵ k≤1 得:n≤2z/ (z -2)
槽数z 圆销数n 运动系数k
3 1~6 1/6~1
4 1~4 0.25~1
5 、6 1~3 0.3~1
≥7 1~2 0.36~1
当z=4及n=2时 k=n(1/2-1/z) = 0.5
说明此时槽轮的运动时间和静止时间相等。
2、运动特性 (1)外啮合槽轮机构