主动侧倾稳定系统, 功能
汽车安全之主动安全设备篇
汽车安全之主动安全设备篇主动安全设备指的是那些可以帮助驾驶员避免事故的技术装备。
随着汽车科技的不断发展,主动安全设备在汽车行业中得到了广泛的应用。
本文将详细介绍汽车主动安全设备的种类和功能。
一、防抱死制动系统(ABS)防抱死制动系统是一种可以防止车轮在制动时锁死的技术装备。
当驾驶员踩下制动踏板时,ABS系统会根据车速、车轮转速等参数来调整制动力度,使车轮能够保持旋转。
这样可以避免车轮锁死导致的失控,提高刹车时的稳定性和制动效果。
二、电子稳定控制系统(ESC)电子稳定控制系统是一种可以帮助驾驶员保持车辆稳定的技术装备。
当车辆发生侧滑或失控时,ESC系统会自动调整车轮的刹车力度和动力输出,帮助驾驶员恢复操控。
同时,ESC系统还可以通过传感器感知车辆的姿态和动态参数,提供转向辅助和侧倾控制等功能,提高行驶的安全性和稳定性。
三、牵引力控制系统(TCS)牵引力控制系统是一种可以帮助驾驶员提高车辆的牵引力和抓地力的技术装备。
当车辆驶入低摩擦路面或行驶在雨雪天气时,TCS系统会根据车辆的动态参数和传感器信息,自动调整车轮的动力输出,以防止车辆打滑或失控。
这样可以提高车辆的牵引力和抓地力,提高行驶的稳定性和安全性。
四、自适应巡航控制系统(ACC)自适应巡航控制系统是一种可以根据前方交通情况自动调整车速的技术装备。
驾驶员只需设置巡航速度和安全距离,ACC系统会通过雷达或摄像头感知前方车辆的距离和速度,自动调整车辆的速度和跟随距离,以保持与前车的安全距离。
这样可以减轻驾驶员的驾驶负担,提高行驶的安全性和舒适性。
五、车道保持辅助系统(LKA)车道保持辅助系统是一种可以帮助驾驶员保持车辆在车道内行驶的技术装备。
通过摄像头或传感器感知车道线的位置,LKA系统可以主动调整方向盘的扭矩,保持车辆在车道内行驶。
当车辆偏离车道或发生漂移时,LKA系统会发出警告提示驾驶员纠正行驶,并辅助驾驶员进行纠正操作,提高行驶的安全性和稳定性。
宝马专业名词解释

宝马专业名词解释1.巡航控制系统借助电子巡航控制系统,您可以选择任何30公里/小时以上的偏好巡航速度,并稳定地以该速度行驶。
从而令爱车轻松地保持在限速以下,让您更自由地享受驾驶乐趣。
视您的BMW车型而定,可以通过安装在转向柱上的易用型操纵杆或者通过多功能方向盘上的按钮控制系统。
系统允许您保存一系列的巡航速度,通过按钮激活所保存速度,使您根据不同的行驶状态和速度限制范围,便捷地调节速度。
巡航控制系统使您能够完全自由地享受驾驶乐趣,而不必持续监视车辆的速度。
尤其是在长途旅行中,系统还会减轻腿部肌肉的疲劳(尤其是小腿肌肉),因为您可以放松双脚,而不必总是保持在加速踏板上。
得益于电子巡航控制系统,使保持30公里/小时以上的速度变得轻而易举。
保持在限速以下的难度明显降低,因为您不再需要在驾驶时不断查看车速表。
一旦您设定偏好的速度以后,巡航控制系统便会保持该速度,您也不必再将双脚保持在加速踏板上。
如果您加速了,则系统在其后自动将车辆恢复到之前的巡航速度。
制动会关闭巡航控制系统。
一个电子控制单元保存您激活系统时的行驶速度,通过持续将所保存速度与实际的车速对比,以保持该速度。
并通过调节发动机功率输出,校正变化。
电子车速表则管理控制电子装置。
2.主动巡航控制系统主动巡航控制系统繁忙的公路和高速公路上的行驶变得更加轻松。
它在可能的时候保持理想的车速,同时与前方车道上的所有车辆保持一个预定的距离。
车辆前方的雷达传感器持续地扫描前方道路。
当您的BMW靠近一个较慢的车辆时,主动巡航控制系统自动降低发动机的输出功率并轻微制动,使您的BMW 与前方车辆保持一个预定的距离。
该距离被设定为秒,而不是米,这样就总能根据当前速度预留出安全的反应时间。
如果前方车道畅通,主动巡航控制系统自动将车辆速度提高到您偏好的巡航速度。
最多可以预设四种不同的巡航速度。
踩下油门或制动踏板将关闭该系统。
在弯道上,主动巡航控制系统利用来自动态稳定控制系统和导航系统的数据计算是否需要调整巡航速度,并确定雷达监控区域内的车辆是否位于同一条或相邻的车道上。
液压马达式汽车主动稳定杆系统建模与控制

液压马达式汽车主动稳定杆系统建模与控制赵韩;赵福民;黄康;邵可;孙浩【摘要】以液压马达式主动稳定杆系统为研究对象,推导得到了液压马达式主动稳定杆的非线性动力学模型。
利用线性化反馈的滑模控制方法设计了其控制器,并利用 Lyapunov 理论对控制系统的稳定性进行了证明。
通过 CarSim 和MATLAB/Simulink 对主动稳定杆系统进行了联合仿真,得出安装液压马达式主动稳定杆系统的车辆在双移线工况下运行的响应曲线。
为了验证设计的控制方法,进行了实车试验。
结果表明,与被动稳定杆相比,主动稳定杆系统具有较好的抗侧倾特性以及乘坐舒适性。
%Taking active stabilizer bar system with hydraulic motor as the obj ect,a nonlinear dy-namics model of active stabilizer bar system with hydraulic motor was established.The controller was designed with the control method for the feedback linearization sliding mode.And the stability of the control system was analyzed by Lyapunov stability theory.On the basis of the CarSim-MATLAB/Simulink co-simulation of the active stabilizer bar system,the response curves on the double-lane-change conditions were achieved.A real vehicle test was also worked out for the verification of the de-sired control method.The results show that the active stabilizer bar system has the preferable charac-teristics of anti-roll and ride comfort compared with the passive stabilizer bar.【期刊名称】《中国机械工程》【年(卷),期】2016(027)014【总页数】6页(P1976-1981)【关键词】主动稳定杆;非线性动力学;滑模控制;防侧倾【作者】赵韩;赵福民;黄康;邵可;孙浩【作者单位】合肥工业大学,合肥,230009;合肥工业大学,合肥,230009;合肥工业大学,合肥,230009;合肥工业大学,合肥,230009;合肥工业大学,合肥,230009【正文语种】中文【中图分类】U461汽车转弯时,受到离心力的作用,车身在侧向加速下会发生侧倾,不但易造成翻车等事故,而且降低了车内人员的舒适性和汽车的操纵性,间接降低了安全系数[1]。
采埃孚(ZF)全新自动变速器与ARS、AOS稳定系统
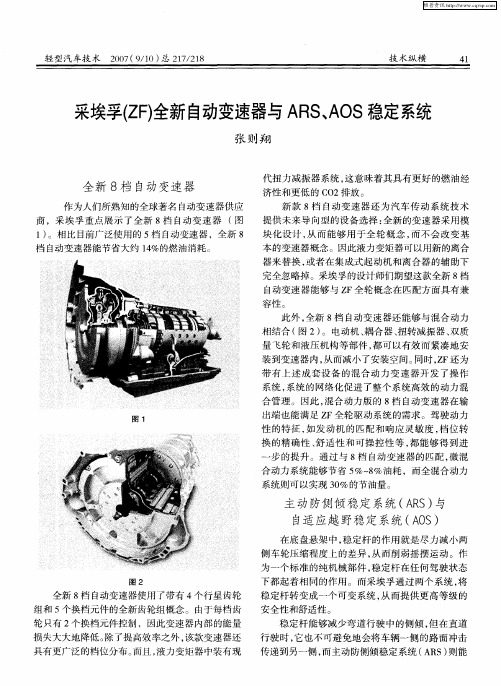
自适 应 越 野稳 定 系统 ( O ) A S
在底 盘 悬 架 中 , 定 杆 的作用 就 是 尽力 减 小 两 稳
侧 车 轮压缩 程 度上 的差异 , 而 削 弱摇 摆运 动 。作 从 为 一个 标 准 的纯机 械 部 件 , 定杆 在 任 何驾 驶 状态 稳
图2
下都 起着 相 同的作 用 。 而采埃 孚 通过 两个 系统 , 将
全新 8档 自动 变 速器使用 了带 有 4个行 星齿 轮 组 和 5 换 档元件 的全新 齿 轮组概 念 。 由于每档 齿 个
轮 只有 2个换 档元 件控 制 ,因此变 速器 内部 的能量
稳定杆转变成一个可变系统 , 而提供更高等级的 从 安 全性 和舒 适性 。
稳 定 杆 能够 减少 弯 道行 驶 中 的侧 倾 , 在直 道 但 行驶时 , 它也 不 可避 免 地会 将 车辆 一侧 的路 面 冲击 传 递到 另一 侧 , 主 动防侧 倾稳 定 系统 ( R 则 能 而 A S)
损 失大大 地 降低 。 了提高效 率 之外 , 款变 速器 还 除 该 具 有更广 泛 的档位分 布 。 而且 , 力变矩 器 中装有 现 液
维普资讯
4 2
技 术纵横
轻 型汽 车技 术
2 0 ( /0) 2 7 2 8 0 7 9 1 总 1/ 1
彼此 分离 。
矩, 确保悬架的响应更舒适。 如果离 开铺装 路面 , 稳定杆 则变 成 了一 个 障碍 。
£
勇
£ £
:
£
‘
:
’
:
-
:
乌
已
铃 木 Kz s i i h 2概 念 车 a
在 最近开 幕 的东 京 车展上 ,铃 木又推 出 了一 款 Kzs i i h2概念 车 , 是一 款 co s v r 动旅 行车 。 a 这 rso e 运 厂商称 :i s i 概念车的外观设计传递 出动感特 K a h2 z
车身稳定系统(ESP)的作用

车身稳定系统(ESP)的作用车身稳定系统(ESP)是一种先进的车辆动态控制系统,它通过传感器监测车辆的行驶状态,及时识别并纠正车辆可能出现的侧滑、失控等危险情况,提高车辆的稳定性和安全性。
ESP系统的作用在于有效地防止车辆在紧急情况下失控,保障驾驶者和乘客的生命安全,同时提升驾驶的舒适性和操控性。
本文将从ESP系统的原理、工作方式和优势等方面进行详细介绍。
一、ESP系统的原理ESP系统是基于车辆动态稳定控制原理而设计的,其核心思想是通过传感器实时监测车辆的各项数据,如车速、转向角度、侧倾角等,然后根据这些数据判断车辆的行驶状态,当车辆出现侧滑、打滑或失控情况时,ESP系统会通过制动系统和发动机控制系统进行干预,以恢复车辆的稳定状态,避免事故的发生。
二、ESP系统的工作方式1. 传感器监测:ESP系统通过安装在车辆各个部位的传感器,如轮速传感器、转向传感器、侧倾传感器等,实时监测车辆的状态数据。
2. 数据处理:ESP系统将传感器采集到的数据传输给控制单元,控制单元通过算法对数据进行处理分析,判断车辆是否存在潜在的失控风险。
3. 干预控制:当ESP系统判断车辆存在失控风险时,会通过制动系统和发动机控制系统进行干预,比如瞬间制动某个车轮、调整发动机输出功率等,以恢复车辆的稳定状态。
三、ESP系统的优势1. 提高行驶安全性:ESP系统可以在车辆出现侧滑、打滑等危险情况时及时干预,有效避免事故的发生,提高行驶的安全性。
2. 提升驾驶舒适性:ESP系统可以在车辆行驶过程中自动调整车辆的姿态,保持车辆的稳定性,提升驾驶的舒适性和稳定性。
3. 改善操控性能:ESP系统可以根据车辆的行驶状态进行精准控制,提高车辆的操控性能,让驾驶者更加轻松地驾驶车辆。
四、结语车身稳定系统(ESP)作为一项重要的车辆安全装备,对于提高车辆的稳定性和安全性起着至关重要的作用。
通过实时监测车辆的行驶状态并及时干预,ESP系统可以有效地防止车辆在紧急情况下失控,保障驾驶者和乘客的生命安全。
什么是ESP
什么是ESPESP 是车身电子稳定控制系统(Electronic Stability Program)的简称,是一种在紧急驾驶条件下防止车辆打滑的制动系统,其最主要的特点就是它的主动性,如果说ABS 是被动地作出反应,那么ESP 却可以做到防患于未然。
ESP 最早由德国博世(Bosch)公司于1997 年研制成功,并首先由奔驰公司应用与其A 级轿车上。
之后,其他公司也分别研究各自的车身电子稳定控制系统,只不过名字有所不同,其实原理都是一样的。
比如奔驰、大众、奥迪、雪铁龙、标致、现代叫做ESP,宝马、马自达叫做DSC,本田叫做VSA,丰田叫做VSC,日产叫做VDC。
ESP 工作原理简介:ESP 系统由中央控制单元(ECU)及转向传感器、车轮传感器、侧滑传感器、横向加速度传感器和执行器组成,其目的是在电脑实时监控汽车运行状态的前提下,对发动机及制动系统进行干预和调控。
在汽车行驶过程中,转角传感器感知驾驶者转弯方向和角度,车速传感器感知车速、油门开度和转速力矩,刹车传感器感知刹车力,而摆角传感器则感知车子的倾斜度和侧倾速度。
ECU 了解这些信息之后,通过计算后判断汽车要正常安全行驶和驾驶者操纵汽车意图的差距,然后,由ECU 发出指令,调整发动机的转速和车轮上的刹车力,从而修正汽车的过度转向或转向不足,以避免汽车打滑、转向过度、转向不足和抱死,从而保证汽车的行驶安全。
从严格的角度来讲,ESP 系统实际上包括ABS 和TCS(牵引力控制系统)两大系统的功能,但又不是两者简单的叠加。
它们之间的差别主要是ABS 和TCS 只能被动的作出反应,而ESP 则能够探测和分析车况并纠正驾驶的错误,防患于未然。
面向智能汽车的电机式主动稳定杆防侧倾控制系统研究

面向智能汽车的电机式主动稳定杆防侧倾控制系统研
究
面向智能汽车的电机式主动稳定杆防侧倾控制系统研究是一个
重要的研究领域,旨在通过电机驱动技术和主动控制算法来改善汽车的侧倾稳定性。
传统的汽车悬挂系统在遇到弯道行驶或急转弯时容易出现侧倾
现象,这会影响车辆的操控性和驾驶安全。
电机式主动稳定杆防侧倾控制系统的设计思路是通过利用悬挂系统上的电机,实现对车辆侧倾力矩的主动控制,从而提高车辆的侧倾稳定性和操控性能。
研究该系统的关键是如何准确捕捉车辆的侧倾状态,并通过精确的控制算法对电机进行调节以实现有效的侧倾补偿。
通常会采用车辆的传感器来实时监测车辆的横向加速度、侧倾角度等参数,通过这些参数与预设的控制算法进行计算和分析,然后控制电机输出适当的力矩来减小车辆的侧倾角度。
此外,研究者们还需考虑电机的选型和布置、控制策略的优化、传感器的精确性和可靠性等问题。
他们通过仿真实验和实际测试来验证电机式主动稳定杆防侧倾控制系统的效果,并进行系统的优化和改进。
这项研究具有重要的意义,它不仅可以提高汽车的操控性和驾驶安全,还可以为智能汽车的发展提供有力支持。
通过电机式主动稳定杆防侧倾控制系统,汽车可以更加稳定地行驶在弯道或急转弯的道路上,为驾驶员提供更加舒适和安全的驾驶体验。
车身电子稳定系统

车身电子稳定系统随着汽车行业的发展,车身电子稳定系统已经成为现代汽车的标配,它不仅改善了汽车的行驶性能,也在提高了行车安全方面起到了重要的作用。
什么是车身电子稳定系统?车身电子稳定系统是一种主动安全技术,它利用车辆的传感器和计算机,以及车辆控制单元(ECU)来监控车辆的运动和方向控制,通过精确地调整制动系统、转向系统以及引擎输出,使车辆保持在预期方向上行驶,从而有效地防止了侧滑、打滑、失控等现象的发生。
车身电子稳定系统的原理:车身电子稳定系统原理非常简单。
当车辆行驶方向发生偏差时,传感器会感知到并将信号传输至ECU中央控制单元。
控制单元将根据车辆当前状态进行分析计算,然后相应地调整制动系统和车辆引擎输出,最终让车辆保持在预期行驶方向上。
当车辆失控时,车身稳定系统会立即介入并对车辆进行控制处理,避免车辆进一步失控,从而保障了行车安全。
车身电子稳定系统的功能及作用:车身电子稳定系统可以进行多种处理来确保汽车的稳定性。
它可以通过检测车辆的横向加速度、转向角度和车轮转速来掌控车辆的行进状况。
其核心功能主要包括侧滑控制、打滑控制以及过弯控制。
侧滑控制:当车辆侧倾时,车身电子稳定系统会采用自动刹车控制来减缓车辆的速度,使车辆恢复稳定状态。
它会自动调整制动器泵进行制动控制,从而保证车辆始终行驶在预设的轨迹上。
打滑控制:当车轮失控时,车身稳定系统会根据车辆行驶的状态自动调整制动系统和引擎输出的力度以及TCU传输装置,使车辆尽快恢复正常的行驶状态。
过弯控制:在驾驶者无法顺利通过弯道时,车身稳定系统会对车辆进行过弯控制。
在车辆过弯瞬间,它会检测角度和车速等相关参数,然后采取相应的控制措施,使车辆保持住好的稳定性,避免车辆掉头或边沟打滑等现象的发生。
车身电子稳定系统的优势及应用:车身电子稳定系统在提高汽车行驶性能和保障行车安全方面具有独特的优势。
车身电子稳定系统可以分析并掌控车辆的行驶状态,并配合刹车控制、引擎输出等系统,使车辆行驶过程更加平稳自然。
奔驰车系轮胎压力监测系统详解及典型故障4例(下)

(接上期)下面通过4个具体的故障案例,进一步说明奔驰轮胎压力监测系统RDW和RDK的技术特点和诊断方法。
故障现象一辆2016款奔驰E260 CGI长轴版(CODE 806),搭载274 920型发动机,VIN码为LE42121361L26****,行驶里程为76 564km。
据车主反映,该车轮胎被钉扎漏气后,仪表台上没有出现胎压报警信息,换上备胎继续行驶后,仍然没有胎压报警提示。
故障诊断与排除接车后,首先查询车籍卡,发现故障车装备有代码为477的车胎漏气警报系统(RDW)。
连接奔驰专用诊断仪进行快速测试,RDW主控模块中的电控车辆稳定行驶系统(ESP)N30/4内没有存储任何故障码(图7)。
根据系统工作原理分析,导致该车胎压报警系统失灵的可能是原因有:ESP软件问题;轮毂变形;轮胎型号或花纹不一致;轮速传感器信号失真,如信号轮脏污;YAW摇摆率传感器故障;ESP硬件故障。
尝试升级电控车辆稳定行驶系统(ESP)N30/4软件,结果没有找到新软件;检查实际值,车辆静止时各个车轮的轮速均为0,且行驶时各个车轮的轮速均保持一致,未见异常;检查4个车轮的轮胎,发现型号、花纹形状及深度也都一致;目测4个轮毂,未发现有无明显的变形。
尝试模拟故障以期再现故障。
将4个车轮的气压均调整到标准气压,进行胎压复位并行驶一段距离之后,将左前轮胎压放气至1.5bar(1bar=100kPa),再次上路行驶大约3km,仪表台上没有出现胎压报警信息。
找来同款正常车辆,放气后大约行驶1km左右,仪表台上就出现了胎压报警提示。
尝试进行横摆率、横向和纵向加速度传感器(YAW)B24/15的校准,操作成功。
再次上路行驶,仪表台上仍然没有胎压报警提示。
检查YAW传感器B24/15的实际值,发现车辆静止在水平路面上时,横向加速度实际值为-1.19m/s 2(图8),标准值为-1~1m/s 2,显然故障车横向加速度实际值不在正常范围内,稍稍超出了标准范围。
汽车主动防侧倾系统建模与试验分析
汽车主动防侧倾系统建模与试验分析黄康;潘毅;赵萍【摘要】A dynamics model of automotive active anti-roll bar system was proposed to improve the vehicle's driving stability.A PID roll stability controller was designed by establishing auto active defense tilting lever model in the MATLAB/Simulink environment,and the automobile dynamics model was established in CarSim,and the simulation of the system was realized by MATLAB/Simulink and CarSim.The simulation results indicate that the active anti-roll bar system may significantly reduce the roll angles of vehicle body compared with common anti-roll bar.The road tests were also processed,which verified the simulation and approves that the automotive active anti-roll bar system may effectively improve the vehicle's driving stability and safety,as well as the riding comfort.%为提高汽车行驶稳定性,建立了汽车主动防侧倾系统的动力学模型,通过在MATLAB/Simulink环境中建立汽车主动防侧倾稳定杆模型,设计了PID侧倾稳定控制器.在CarSim软件中建立了汽车动力学模型,实现了该汽车主动防侧倾系统的MATLAB/Simulink和CarSim的联合仿真.仿真结果表明:与传统横向稳定杆相比,汽车主动防侧倾系统能够明显减小车辆车身的倾角.最后通过实车试验对仿真结果进行了验证,试验结果表明了仿真结果的正确性,证明了汽车主动防侧倾系统能有效提高车辆行驶稳定性和安全性,改善乘坐舒适性.【期刊名称】《中国机械工程》【年(卷),期】2017(028)022【总页数】7页(P2701-2706,2731)【关键词】主动防侧倾;稳定杆;侧向稳定性;联合仿真【作者】黄康;潘毅;赵萍【作者单位】合肥工业大学机械工程学院,合肥,230009;合肥工业大学机械工程学院,合肥,230009;合肥工业大学机械工程学院,合肥,230009【正文语种】中文【中图分类】U461为改善汽车行驶平顺性,通常把悬架刚度设计得比较低,其结果是影响了汽车行驶稳定性。
车辆侧倾稳定性分析与侧翻预警

本案例以某品牌轿车为例,介绍其在设计和生产过程中如何对车辆的侧倾稳定性和侧翻预 警进行联合优化。该品牌车型通过采用先进的动力学模型、优化结构设计、合理布置传感 器等方法,实现了对车辆侧倾稳定性和侧翻预警的联合优化。
车辆侧倾稳定性和侧翻预警联合优化结论
通过对某品牌轿车的车辆侧倾稳定性和侧翻预警进行联合优化,显著提高了该车型的安全 性能和行驶稳定性。在设计和生产过程中,注重对这两方面的性能进行优化,能够为驾驶 员和乘客提供更加安全、舒适的驾驶体验。
侧翻风险评估
基于侧翻识别结果,对车 辆的侧翻风险进行评估, 通常采用基于概率统计的 方法进行评估。
预警信号输出
一旦识别出车辆可能发生 侧翻,系统会立即输出预 警信号,提醒驾驶员采取 相应的避险措施。
车辆侧翻预警系统设计
传感器选择与布置
选择合适的传感器,如陀螺仪、加速度计等,并合理布置在车辆 的关键部位,以便准确监测车辆的动态性能。
车辆侧倾稳定性分析与侧翻预警
汇报人:
日期:
• 车辆侧倾稳定性分析 • 车辆侧翻预警系统 • 车辆侧倾稳定性与侧翻预警的关
系 • 案例分析与应用 • 总结与展望
01 车辆侧倾稳定性分析
车辆侧倾稳定性基本概念
01
车辆侧倾稳定性是指车辆在侧向 力作用下保持稳定不倾覆的能力 。
02
车辆侧倾稳定性的影响因素包括 车辆结构、重心位置、轮胎摩擦 力、空气动力学等。
实时性评估
评估系统的实时性,即从 识别到预警输出的时间延 迟。
鲁棒性评估
评估系统在各种工况下的 稳定性,如在不同道路条 件、车速、载荷等条件下 的表现。
03 车辆侧倾稳定性与侧翻预警的关系
汽车配置名词解释
汽车配置名词解释汽车配置名词解释(一):主/被动安全配置汽车的安全配置按照作用原理可以分为:主动安全配置和被动安全配置两大类。
主动安全配置就是预防车辆发生事故的安全配置。
换句话说,他的主要作用是在事故之前,尽量避免事故发生的。
例如常见的ABS,EBD,ESP等。
所以,主动安全配置更加重要一些。
被动安全配置就是在事故发生后,避免车内人员少受伤害的安全配置。
换句话说,他的作用是一种补救措施,在事故发生后,尽量避免人员的伤害。
例如常见的气囊等。
下面我们先为大家讲解主动安全配置:■防抱死系统(ABS)ABS中文译为“防锁死刹车系统”.它是一种具有防滑、防锁死等优点的汽车安全控制系统。
ABS的原理是:在紧急制动的时候,如果四个轮子全部被刹车系统锁死,那么车轮就会由滚动变成滑动,这时候车辆很容易发生侧滑或跑偏。
而ABS系统则不会对轮子完全锁死,而会以每秒60-120次的频率对车辆进行“点刹”,这样就能够有效的防治车轮锁死,使汽车在制动状态下仍能转向,保证汽车的制动方向稳定性,防止产生侧滑和跑偏。
现在,ABS系统已经成为汽车的标准配置,很少有车辆不配备ABS系统。
那些为了降低成本而不配备ABS 系统的厂家完全是对消费者生命安全的漠视,我们鄙视这种行为。
■制动力分配系统(EBD)EBD的英文全称是Electric Brakeforce Distribution,中文直译就是“电子制动力分配”。
EBD的原理是:车辆在制动时,车载电脑会根据车辆每个车轮与地面的摩擦力的情况,对每个车轮施加不同的制动力,从而保证车辆的稳定性。
例如:如果左侧车轮是接触的是湿滑路面,而右侧接触的是干燥路面,很明显左右车轮与地面的摩擦力是不同的。
如果在制动时对四个轮子施加相同的制动力,就容易产生打滑、倾斜和侧翻等现象。
而配有EBD系统的车辆则不会发生这种情况,他会对左右车轮施加不同的制动力而保证车辆的稳定。
现在的EBD系统一般都是与ABS系统整合成一套系统存在的,所以我们经常看到厂家宣传说:车辆配有ABS+EBD系统。
汽车侧倾稳定主动控制系统的仿真研究

汽车侧倾稳定主动控制系统的仿真研究
唐新蓬;段小成
【期刊名称】《汽车技术》
【年(卷),期】2008(000)008
【摘要】在ADAMS/Car下建立了前、后悬架都装有主动横向稳定杆的95自由度虚拟整车模型.采用模糊PID控制策略,在MATLAB/Simulink环境中对车辆抗侧倾性能进行了联合仿真,实现了PID控制过程中参数的在线整定.仿真结果表明,模糊PID控制具有较强的自适应能力和抗干扰能力,可有效减小车身侧倾角,在保证乘坐舒适性的同时提高了车辆的行驶稳定性.
【总页数】5页(P23-27)
【作者】唐新蓬;段小成
【作者单位】华中科技大学;华中科技大学
【正文语种】中文
【中图分类】U461
【相关文献】
1.舍弗勒机电式主动侧倾控制系统增强稳定性 [J], ;
2.考虑侧倾的半主动悬架与电子稳定控制系统集成控制 [J], 张亮修;杨家颖;吴光强
3.基于主动横向稳定杆的汽车防侧倾控制策略及算法研究 [J], 赵强; 解利臣
4.基于主动横向稳定杆的汽车防侧倾控制策略及算法研究 [J], 赵强; 解利臣
5.轿车空气悬架主动抗侧倾控制方法仿真对比研究 [J], 张军
因版权原因,仅展示原文概要,查看原文内容请购买。
主动稳定杆工作原理

主动稳定杆工作原理
主动稳定杆是一种车辆稳定性控制系统,其工作原理基于车辆动力学和控制理论。
主动稳定杆通过传感器测量车辆的各项状态参数,如车速、加速度和车身倾斜角度等,然后通过计算和比较实际状态和期望状态之间的差异,确定需要采取的控制策略。
根据需要,主动稳定杆可以通过控制车辆的制动系统或悬挂系统来减少或增加车辆的滚动和侧倾,从而提高车辆的稳定性和安全性。
此外,主动稳定杆还可以与其他车辆动态控制系统,如牵引力控制系统和动态稳定控制系统等,协同工作,更有效地保障车辆的稳定性和安全性。
轮船稳定器原理

轮船稳定器原理轮船稳定器原理引言:在航海过程中,轮船必须面对风浪等恶劣海况,而稳定性是航海安全的重要因素之一。
轮船稳定器作为一种重要的设备,可以帮助轮船在恶劣的海况下保持平稳。
本文将介绍轮船稳定器的原理及其在航海中的应用。
一、轮船的稳定性轮船的稳定性是指轮船在受到外界扰动时能够回到平衡位置的能力。
轮船的稳定性主要受到船体形状、荷载分布以及海况等因素的影响。
一个稳定的轮船应该具备以下特征:首先,船体应具有足够的抗侧倾能力,即在受到侧风或侧浪时能够顶住外力;其次,轮船的重心应该尽量保持在低位置,以增加稳定性;最后,通过适当的平衡措施,如调整载重比例等,来优化轮船的稳定性。
二、轮船稳定器的作用轮船稳定器是一种旨在改善轮船稳定性的设备。
它通过产生力矩,使轮船恢复到平衡位置。
轮船稳定器主要有两种类型:被动稳定器和主动稳定器。
1. 被动稳定器:被动稳定器是指那些不需要外部能源或控制系统进行操控的稳定器。
常见的被动稳定器包括船体侧倾抵抗杆、垂直舵和稳定矮桅帆等。
这些稳定器通过改变船体的重心位置和抵抗侧倾的力矩来增加轮船的稳定性。
船体侧倾抵抗杆是一种通过在船体两侧安装水平杆件来抵抗侧风和浪涌的力矩。
当侧风或侧浪作用在船体上时,船体侧倾抵抗杆会产生一个与舵角方向相反的力矩,从而帮助恢复船体平衡。
然而,船体侧倾抵抗杆的效果受限于船体形状和侧风方向的影响。
垂直舵是一种位于轮船底部的垂直向下的舵,它通过改变船体行进方向的偏移量来产生力矩。
当船体受到侧风或侧浪作用时,垂直舵可以产生一个力矩来抵抗侧倾,从而提高轮船的稳定性。
稳定矮桅帆是一种通过改变船体的侧倾角度来提高稳定性的被动稳定器。
在恶劣海况下,船员可以舵取所需航向,使稳定矮桅帆位于风侧,通过风压力来产生侧倾力矩,从而保持船体的稳定。
2. 主动稳定器:与被动稳定器不同,主动稳定器需要外部能源以及控制系统进行操控。
常见的主动稳定器主要包括侧推器和球ast。
侧推器是一种位于船两侧的推力器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
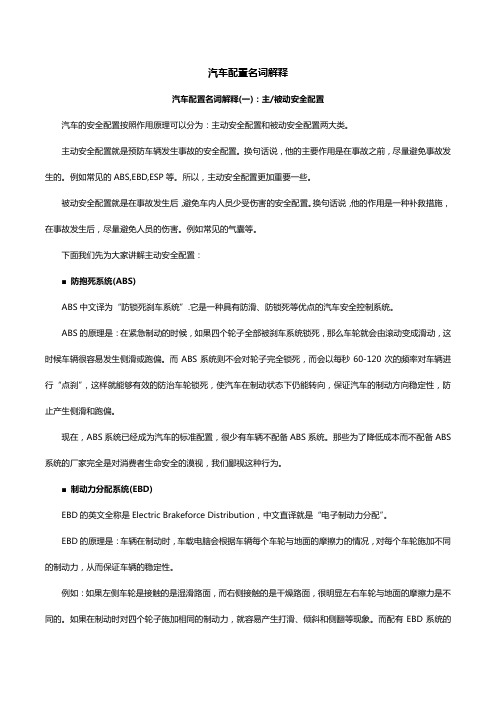
GF32.34-P-0002GR主动侧倾稳定系统, 功能21.9.11车型166, 装配主动转弯系统/代码 (468)P32.34-2025-79A1仪表盘L6/4右后轴转速传感器N51/3空气悬挂系统控制单元 {装配空气悬挂系统A1p13多功能显示屏N3/9共轨喷射系统柴油机 (CDI) [带水平调节和自适应减震系统 控制单元 (装配柴油发动机)B4/26(ADS) 的空气悬挂]/代码 (489)}主动侧倾稳定系统后轴压力传感N3/10电控多端顺序燃油喷注/点火系统 N51/6主动侧倾稳定系统控制单元器 1(ME-SFI) [ME] 控制单元 (装配汽油发动机)N72下部控制面板控制单元B4/27主动侧倾稳定系统后轴压力传感N10信号采集及促动控制模组 (SAM) N72s36"舒适/运动" (Comfort/Sport) 按钮 器 2控制单元[自适应减震系统 (ADS)] {装配空气悬挂系统B4/28N15/7分动箱控制单元[带水平调节和自适应减震系统 主动侧倾稳定系统前轴压力传感[装配公路及越野组件/代码 (430)](ADS) 的空气悬挂]/代码 (489)}器 1N28/1拖车识别控制单元 [装配拖车挂钩/N72/3越野操作面板控制单元B4/29代码 (550)][装配公路及越野组件/代码 (430)]主动侧倾稳定系统前轴压力传感N30/4电控车辆稳定行驶系统 (ESP) 器 2控制单元 (混合动力除外)B24/20N30/6再生制动系统控制单元 主动侧倾稳定系统横向加速度传(对于混合动力)感器N49方向盘转角传感器B37油门踏板传感器L6/1左前轴转速传感器L6/2右前轴转速传感器L6/3左后轴转速传感器N72/3s1越野组件行驶程序控制单元Y36/11主动侧倾稳定系统前轴换向阀控制器区域网络 (CAN) [装配公路及越野组件/代码 (430)]Y36/12主动侧倾稳定系统前轴调压阀E1底盘控制器区域网络 (CAN 1)N73电子点火开关控制单元Y86/2主动侧倾稳定系统进气节流阀控制器区域网络 (CAN) N80转向柱模块控制单元Y86/3主动侧倾稳定系统安全阀E2底盘控制器区域网络 (CAN 2)X11/4诊断连接器控制器区域网络总线 H 级 (CAN H)Y3/8n4全集成化变速箱控制单元 控制器区域网络总线 B 级 (CAN B)车辆动态控制器区域网络 (CAN)Y36/9主动侧倾稳定系统后轴换向阀车内控制器区域网络 (CAN)Y36/10主动侧倾稳定系统后轴调压阀控制器区域网络总线 C 级 (CAN C)局域互联网 (LIN) B12中央控制台开关局域传动系统控制器区域网络 (CAN)互联网 (LIN)控制器区域网络总线 D 级 (CAN D)诊断控制器区域网络 (CAN)功能要求, 概述•发动机运转在装配主动侧倾稳定系统的车辆上, 前轴和后轴上的传统 (被动)稳定杆被替换为允许进行主动干预的 2 根稳定杆. 主动干预通过使用 2•档位范围 "D" 或 "N"个液压旋转式促动器实现.主动侧倾稳定系统控制单元根据特性图调节各液压旋转式促动器中的系统概述液压.主动侧倾稳定系统可增加并改进驾乘舒适性和车辆动态性.最重要的输入变量是车辆的横向加速度.这通过以下几项系统特性实现:Un Re gi st er ed该变量一方面由主动侧倾稳定系统的横向加速度传感器测得,-通过车身的横向移动提高了悬架舒适性另一方面由主动侧倾稳定系统控制单元根据以下输入因素计算得到:-横向倾斜, 侧风和不均匀载荷情况下稳定车身-方向盘转角, 通过方向盘转角传感器--方向盘转速, 通过转向柱管模块控制单元通过允许在不超过最高车速的情况下进行车道变换操作提高了行-车速, 通过左前轴转速传感器, 右前轴转速传感器, 驶安全性左后轴转速传感器和右后轴转速传感器-转弯过程中的侧倾稳定操作以及车轮载荷的主动分配-提高了响应性, 并显著减小了所需的转向角-提高了越野扭转灵活性 (车轴接合角度)------------------------------------------------------------------------------------------改进了对具体障碍物的感测------------------------------------------------------------------------------------------将计算得到的以及测得的横向加速度值相互进行比较. 目标是确保车辆操纵性稳定, 并且方便驾驶员控制.如果两个加速度值之差小于指定限值, 通过主动侧倾稳定系统,则使用计算得到的值确定侧倾运动.可根据车速等行驶条件动态调节前部稳定杆与后部稳定杆之间的侧倾如果两个加速度值之差超出限值, 则隐藏测得的横向加速度值.扭矩分配.侧倾扭矩成比例作用在车身上, 并可根据横向加速度值进行计算.例如, 如果前部稳定杆在车速较高时受到更大侧倾扭矩的作用, 则车辆操纵性会向转向不足以及稳定直向前行驶转变. 两个主动稳定杆必须联合产生一个合适的反作用扭矩, 以减小侧倾角. 车辆会表现出允许进行车道变换的特性.为此,主动侧倾稳定系统控制单元计算液压旋转式促动器中的规定压力, 在中等车速范围内,并确定前部稳定杆和后部稳定杆必须提供的反作用扭矩的百分比.驾驶员会感觉到车辆因主动侧倾控制而表现出更高的响应性. 所需的方向盘转角减小. "电路 15 接通" 时, 首先会对主动侧倾稳定系统控制单元执行内部功能测试.-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------然后会测试以下传感器和促动器的电气功能:由此可测试主动侧倾稳定系统安全阀在断电时是否确实处于目标位置 (关闭). 同时, 会测试主动侧倾稳定系统前轴调压阀的功能.-主动侧倾稳定系统前轴压力传感器 1由于前轴液压旋转式促动器中不会产生压力, -主动侧倾稳定系统前轴压力传感器 2车内乘员不会察觉到该测试的进行.-主动侧倾稳定系统后轴压力传感器 1当车辆静止或车速 v < 5 公里/小时时, 主动侧倾稳定系统完全停用, -主动侧倾稳定系统后轴压力传感器 2所有阀均断电. 当车辆静止时, 不会对任何主动扭矩进行调节.-主动侧倾稳定系统横向加速度传感器因此, 当车辆倾斜 (例如单侧负载, 车辆位于路缘石上) 时, -主动侧倾稳定系统后轴换向阀即使主动侧倾稳定系统横向加速度传感器提供信号, -主动侧倾稳定系统后轴调压阀也不会进行任何主动干预.-主动侧倾稳定系统前轴换向阀主动侧倾稳定系统从车速达到 5 公里/小时时开始启动, 并从车速达到 -主动侧倾稳定系统前轴调压阀30 公里/小时时开始完全启用.-主动侧倾稳定系统进气节流阀-主动侧倾稳定系统安全阀此外, 系统在车辆首次行驶后测试液压安全功能. 系统必须启用过一次.为此,主动侧倾稳定系统液压泵与主动侧倾稳定系统安全阀之间会产生测试------------------------------------------------------------------------------------------压力.------------------------------------------------------------------------------------------在越野模式下, 此功能在车辆静止时可用, 以防止车辆发生横向倾斜. 主动侧倾稳定系统前轴调压阀和主动侧倾稳定系统后轴调压阀未通电在越野模式下, 系统保持启用状态, 直至发动机关闭或接入档位 "P".并因此打开. 液压用油可直接回流到主动侧倾稳定系统储油罐中. 系统中的压力较低. 只有管路和阀门的流阻对其有决定作用.主动侧倾稳定功能分为以下几个条件:转弯•直向前行驶当车辆驶入弯道时,•转弯主动侧倾稳定系统控制单元利用脉冲宽度调制信号 (PWM 信号) •系统故障促动以下阀门:-主动侧倾稳定系统前轴换向阀直向前行驶-主动侧倾稳定系统前轴调压阀当发动机正在运转时,-主动侧倾稳定系统后轴换向阀主动侧倾稳定系统液压泵将液压用油泵入系统中. -主动侧倾稳定系统后轴调压阀主动侧倾稳定系统安全阀通电 (打开). 主动侧倾稳定系统进气节流阀未通电,-主动侧倾稳定系统进气节流阀因此会限制对主动侧倾稳定系统液压泵的供油.作用在液压旋转式促动器一侧的压力不会对各稳定杆产生任何影响, 主动侧倾稳定系统安全阀仍然通电 (打开).因为它会通过内部泄漏释放掉.------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------横向加速度越高, 液压旋转式促动器中产生的液压越大. 系统故障主动侧倾稳定系统控制单元通过以下传感器记录实际压力, 如果检测到系统故障,并将其调节至设定压力:则主动侧倾稳定系统控制单元的故障码存储器中会存储一条条目. -主动侧倾稳定系统前轴压力传感器 1同时, 仪表盘的多功能显示屏上会显示一条信息.-主动侧倾稳定系统前轴压力传感器 2主动侧倾稳定系统安全阀不再通电并关闭. 前轴液压旋转式促动器中的液压用油受到限制,-主动侧倾稳定系统后轴压力传感器 1Un Re gi st er ed旋转式促动器因此而受阻. 随后,-主动侧倾稳定系统后轴压力传感器 2前轴主动稳定杆发挥被动稳定杆的功能. 同时,液压泵输出的油流不受任何压力地直接输送至主动侧倾稳定系统储油根据转弯路径 (右转弯或左转弯),罐.可通过促动主动侧倾稳定系统前轴换向阀和主动侧倾稳定系统后轴换后轴液压旋转式促动器保持打开.向阀确定各液压旋转式促动器所需的转动方向 (向左或向右).由此可产生倾向于转向不足的安全车辆操纵性.由于稳定杆的安装位置 (前轴前方和后轴后方), 液压旋转式促动器具有不同的转动方向.Un Re gi st er ed。