联合收获机的设计
马铃薯联合收获机控制系统设计
马铃薯联合收获机控制系统设计一、引言马铃薯是一种重要的粮食作物,其收获过程对于保证薯品质量和生产效益有着重要的影响。
传统的马铃薯收获方式主要依靠人工操作,效率低下且劳动强度大。
设计一套高效稳定的马铃薯联合收获机控制系统,能够提高收获效率和质量,降低劳动强度,具有重要的实际意义。
二、系统设计方案1.系统框架设计基于控制系统工程原理,马铃薯联合收获机控制系统可分为感知层、控制层和执行层。
感知层通过传感器实时采集马铃薯生长情况和环境参数;控制层根据感知层数据进行数据处理和控制算法运算,生成对马铃薯联合收获机的控制信号;执行层负责将控制信号传递给马铃薯联合收获机的执行部件,实现对机器的精确控制。
2.感知层设计感知层通过各种传感器实时采集马铃薯的生长情况和环境参数,包括马铃薯株高、叶片坡度、土壤湿度、气温等数据。
通过布置多个传感器,实现全面感知,并使用模拟信号转换为数字信号输入控制层。
3.控制层设计控制层是整个控制系统的核心,需要实时处理感知层采集的数据,并根据控制算法生成控制信号。
控制层的设计需要包括以下几个方面:(1)数据处理:对感知层数据进行滤波、去噪和校正,以提高控制算法的准确性和稳定性。
(2)控制算法:设计适用于马铃薯联合收获机的控制算法,包括路径规划、运动控制、坡度补偿等。
(3)控制信号生成:根据控制算法,生成对马铃薯联合收获机的控制信号,通过接口传递给执行层。
4.执行层设计执行层是整个控制系统的最后一环,负责将控制信号传递给马铃薯联合收获机的执行部件。
执行层的设计需要考虑控制信号的传递方式和执行部件的选型。
一般可采用电气控制和液压控制两种方式,根据实际情况选用合适的执行部件。
需确保执行层的可靠性和稳定性,以保证控制系统的性能。
花生联合收获机的设计建议
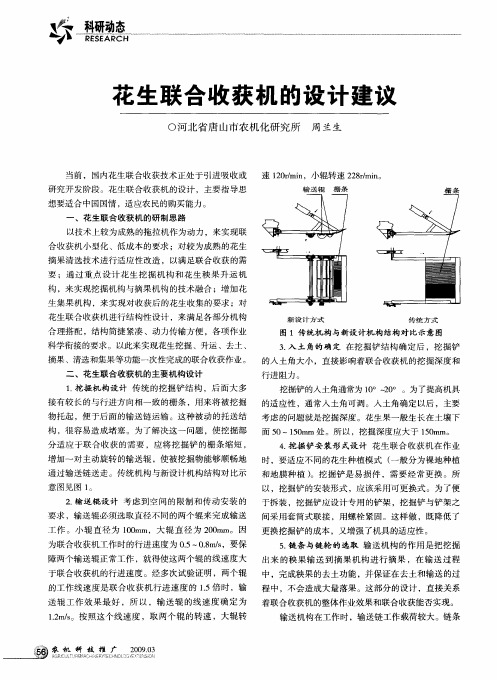
分适应 于联 合收获 的需要 ,应将挖 掘铲 的栅 条缩短 ,
4 挖掘铲安 装形式设 计 花生联 合收获机 在作业 .
增加一对主动旋转 的输送辊 ,使被挖掘物能够顺 畅地 时 ,要适应 不同的花生种植模 式 ( 一般分为裸地种植 通过输送链送走 。传统机构 与新设计机构结构对 比示 和地膜种植 ) 。挖掘 铲是易损 件 ,需 要经 常更 换 。所
构 ,来实现挖掘机构与摘果机构 的技术融合 ;增加花 生集果机构 ,来实现对 收获后 的花生收集的要求 ;对 花生联合收获机进行结构性设计 ,来满 足各部 分机构 合理搭配 ,结构简捷 紧凑 、动力传输方便 ,各 项作业 科学衔接 的要求 。以此来实现花生挖掘 、升运 、去土 、 摘果 、清选和集果等功 能一次性完成 的联合收获作业 。
卸料板能有效地杜绝花生秧被输送 链上 的捡拾齿
行进 阻力 。
挖掘铲的入土角通常为 1o ̄0 。为 了提高机具 0 2。
接有较长的与行进方 向相一致 的栅条 ,用来将 被挖掘 的适 应性 ,通常人土角可调 。人土角确定 以后 ,主要
物托起 ,便于后面 的输送链运输 。这种被 动的托送结 考虑 的问题 就是挖掘深度。花生果一般生长在土壤下
二、花生联合收获机 的主要机构设计 1 挖掘机 构设计 传 统 的挖 掘铲结构 ,后面大 多 .
新 设 计方 式 传 统方 式
图 1 传 统机 构 与 新设 计 机 构 结 构 对 比示 意 图
3 入土 角的确定 在挖 掘铲结构 确定后 ,挖掘铲 . 的人 土角大小 ,直接影响着联合收获机的挖掘深度 和
4YZ—3型玉米联合收获机摘穗部件的设计分析

图 4 摘 穗 板 的 结 构
1 . 摘穗板 固定 板 2 . 摘穗板
3 . 摘穗板刃铁
的, 但 相对于植株是 向前 向上相对运动 的。因此 ,摘穗板 的
主要结构参数有摘穗板有效工作长度、摘穗板的工作问隙。
摘穗板 的摘 穗动作是 在拉 茎辊拉茎作用下 完成 的 ,因此
图3 拉 茎 机构 的 布 局 1、4 . 导 入锥 2 、3 . 拉 茎 辊
的堵塞现 象。经过反复 试验 ,拉茎辊 线速度 与作 业行走速度
的比确定在 3: l 左右为效 果最佳点。
当 代 农 札 长 拦 编 辑 席 明 Vz = 3 V o = 3 X 6 . 7×1 0 0 0 / 3 6 0 0 = 5 . 6尚 ( m/ s )
摘穗板 的工作间隙根 据玉米植株和玉米果 穗的长势来 确 定 。前 面给 出玉米茎秆的最大直径 为 4 c m, 玉米果穗 的最小
杂 ,又多是小块地不连 片作业 ,为了使作业效果 更好 ,故选 用卡板式摘穗机构 。
入摘穗板之 间的早晚程度也 有一定的差异 。因此 ,一般在设 计 上应 使摘 穗板有 效 工作 长度 大于拉 茎辊 一 定值 。试 验表
明 ,若摘穗板有效工作长度大于拉茎辊有效 工作 长度 6 C B 以 上 ,就可 以保证拉茎辊的有效作业 。
直径为 5 c m,故摘穗板间隙一般不大于 4 c m,调整 的标准是
保证茎秆顺利通过 ,同时保证果穗不能进入 。 为 了保证植 株在摘穗过程 中不出现夹堵现 象 ,在摘穗工
作 区内应形 成前紧后松 的趋 势 ,故摘穗板 间隙应后 口大于前 口 ,一般后 口宽 大于前 口宽 3~ 5 mm 即可 。在 通常状态 下 ,
摘穗 板间隙 前 口宽度 应调整 为 3 c m,后 口宽 度应调整 为 3 . 5
马铃薯联合收获机控制系统设计

马铃薯联合收获机控制系统设计1. 引言1.1 研究背景马铃薯是我国重要的农作物之一,其种植面积和产量均位居世界前列。
传统的人工收获劳动强度大、效率低的问题已经成为制约马铃薯产业发展的瓶颈之一。
研究马铃薯联合收获机控制系统设计具有重要的现实意义和实际价值。
针对当前马铃薯产业的现状和需求,本研究旨在设计一套可靠、高效的马铃薯联合收获机控制系统,通过对系统硬件和软件的设计优化,实现对马铃薯联合收获机的智能化控制和全面监测,提高作业效率和准确性,推动马铃薯产业向着智能化、现代化的方向发展。
1.2 研究目的马铃薯联合收获机控制系统的研究目的是为了提高马铃薯收获的效率和质量,降低劳动力成本,并减少人为操作误差所带来的损失。
通过设计一个高效可靠的控制系统,可以实现对收获机的精确控制,使其在不同地形和环境条件下能够稳定运行,实现更加高效的收获作业。
研究马铃薯联合收获机控制系统也有助于推动农业机械化水平的提升,促进农业生产方式的转变,提高农业生产效益,为农业现代化发展做出贡献。
从长远来看,研究马铃薯联合收获机控制系统的目的是为了推动农业科技的进步,提高农业生产的智能化、信息化水平,推动农业现代化建设,促进农业可持续发展。
1.3 研究意义马铃薯是我国重要的粮食作物之一,其产量不断增加,但是传统的人工收获方式效率低下,费时费力。
研究马铃薯联合收获机控制系统设计具有重要意义。
将现代化技术引入到马铃薯收获中,可以提高收获效率,降低劳动强度,节约人力成本。
通过控制系统实现对收获机械设备的智能化操作,可以提高马铃薯的质量和产量,保障粮食安全。
马铃薯联合收获机控制系统设计的研究对于推动农业机械化、智能化发展具有重要意义,有利于提高农业生产效率,推动农业现代化进程。
研究马铃薯联合收获机控制系统设计具有重要的理论和实践意义,对于推动农业生产方式转变,促进现代农业发展具有重要意义。
2. 正文2.1 控制系统设计方案控制系统设计方案是马铃薯联合收获机控制系统的核心部分,其设计的合理与否直接影响到整个系统的性能与稳定性。
半喂入花生联合收获机的设计

半喂入花生联合收获机的设计
半喂入花生联合收获机的设计需要考虑以下几个方面:
1. 割花生部分的设计:需要确保刀片能够有效地将花生割下,同时还要避免损坏花生根部。
可采用可调节高度的刀片和匹配轴流气流系统的设计,以确保割花生的效率和质量。
2. 喂入花生部分的设计:由于只是半喂入方式,所以需要确保喂入口的设计合理,能够同时接收花生和废弃物,并且避免卡住或者堵塞。
为了避免花生积聚在喂入口周围,还需考虑一个收集或吸出系统。
3. 花生分离和收集系统的设计:为了将花生从割下的植株中单独分离出来,需要考虑一个有效的分离和收集系统。
例如,可以采用振动过筛机来分离花生和废弃物,并采用能自动将花生颗粒进一步输送的刷带等方法以实现花生的收集。
4. 联合收获系统的设计:除了花生之外,还需要考虑如何联合收获其他农作物,例如小麦。
可采用可调节高度和将花生喂入口与小麦喂入口分离的设计,以便同时收获两种作物。
5. 安全性和可靠性考虑:最后还需要考虑如何保证半喂入花生联合收获机的安全性和可靠性,例如避免刀片接触地面和其他障碍物,保持良好的维护和保养,以保证设备的长期稳定运行。
马铃薯联合收获机械原理方案设计
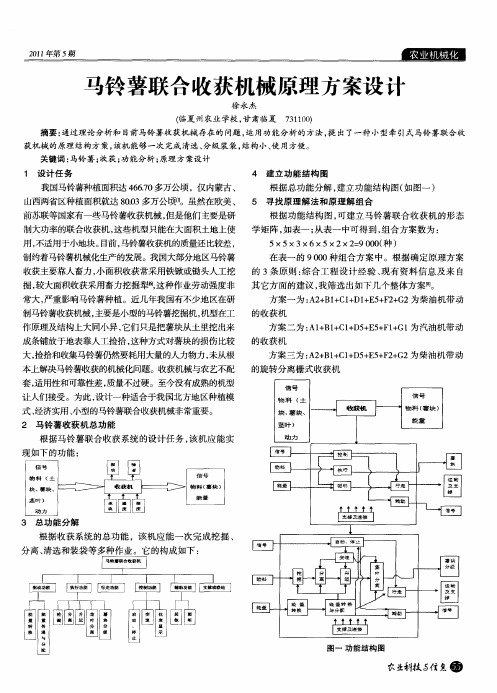
3 总 功 能分 解
根据收获 系统 的总功能 ,该机应能一 次完成挖掘 、 分离、 清选和装袋等 多种作业 。它 的构成 如下 :
图 一 功 能 结构 图
农 射 往是@ 业 技5
2 1 年第 5 01 朝
表~
马铃薯联合收获机形态学矩 阵
保证土垡能沿铲 面顺 利通过 。因此 , 选用 “ 固定 式挖掘
驱动式挖掘器 除有前进运动外 , 还有 回转运 动或往 式等翻 。 6 . 抖动链式输送分离器 .1 2 它 由抖动链 、 抖动轮及 主、 从动链轮组成。抖动链式 行分 离的。夹杂物 、 土块和小石 子等从抖动链 的杆条 中 盘式挖掘器 。 动式挖掘铲工作时 由曲柄这种机构驱动 振
阶段 。 试验表明 , 振动铲与 固定式挖掘器相 比, 它对薯块
关键词 : 马铃 薯 ; 收获 ; 能分析 ; 功 原理 方案 设计
1 设计任务
4 建 立功 能 结 构 图
我国马铃薯种植面积达 4 6 0 6. 多万公顷,仅内蒙古、 7
山西两省 区种植面积就达 8. 多万公顷I 03 0 I I 。虽然在欧美、
根据 总功能分解 , 建立功能结构 图( 图一 ) 如
现如下的功能 :
信 号
在表一的 9 0 种组合方案 中。根据确定原理方案 0 0
的 3条原则 : 合工程设 计经验 、 综 现有 资料信 息及 来 自
方案一为 : 2 B + I D + 5 F + 2为柴油机带动 A + I C + IE + 2 G
的收 获 机
掘, 较大面积收获采用畜力挖掘犁[这种作业劳动强度非 其它方面的建议 , 6 1 , 我筛选 出如下几个整体方案嘲 。
方案二为 : I B + ID + 5 F + 为汽油机带动 A + IC + 5 E + IG1 的收获机 方案三为 : 2 B + ID + 5 F + 2 A + IC + 5 E + 2 G 为柴油机带 动
马铃薯联合收获机控制系统设计

马铃薯联合收获机控制系统设计马铃薯是世界上最重要的作物之一,也是许多国家的主要粮食之一。
马铃薯的种植和收获过程仍然依赖于传统的人工劳动,这导致了生产效率低下和成本高昂。
为了解决这个问题,马铃薯联合收获机控制系统应运而生。
该系统利用现代科技手段来提高生产效率和降低成本,本文将重点介绍马铃薯联合收获机控制系统的设计原理和关键技术。
一、系统的设计原理马铃薯联合收获机控制系统的设计原理主要包括自动驾驶、施肥喷洒、收获等功能。
其中自动驾驶是系统的核心功能,通过全球定位系统(GPS)和传感器技术,马铃薯联合收获机能够自动识别地形、作物行间距,实现自主导航和行驶。
还可以根据不同地块和生长状况自动调整施肥喷洒的数量和方式,最大限度地提高施肥的效果,同时避免浪费。
在收获过程中,系统能够智能分拣和装载马铃薯,极大地提高了收获效率。
二、关键技术1. 全球定位系统(GPS)技术全球定位系统是马铃薯联合收获机控制系统的核心技术之一。
通过GPS技术,马铃薯联合收获机可以实现精准导航和定位,准确识别作物行间距和地形,实现自动驾驶和施肥喷洒。
GPS技术还可以实现定点回放和行驶轨迹记录,便于后期管理和调整。
2. 传感器技术传感器技术在马铃薯联合收获机控制系统中起着至关重要的作用。
通过各种传感器,系统可以实时采集作物生长状况、土壤湿度、施肥效果等信息,为自动施肥和智能收获提供重要数据支持。
传感器技术还可以实现对机器运行状态的实时监测,确保机器的正常运行和安全操作。
3. 人机交互技术人机交互技术是马铃薯联合收获机控制系统中不可或缺的一环。
通过界面友好的人机交互设备,操作人员可以方便地进行各项设定和调整,实现系统的智能化和便捷化操作。
人机交互技术还可以实现对系统各项功能的实时监控和数据分析,为管理人员提供决策支持。
三、应用前景马铃薯联合收获机控制系统已经在一些大型农场得到了广泛应用,并取得了显著的经济效益和社会效益。
随着科技的不断发展和农业生产方式的转变,该系统的应用前景也将越来越广阔。
马铃薯联合收获机控制系统设计

马铃薯联合收获机控制系统设计1. 引言1.1 研究背景马铃薯是世界上最重要的粮食作物之一,其种植面积和产量在全球范围内都居于前列。
随着农业机械化水平的不断提高,马铃薯联合收获机的使用也越来越普遍。
马铃薯联合收获机可以提高收获效率,减少人力成本,缓解人力短缺的问题,是现代农业生产中不可或缺的重要工具。
目前市场上存在的马铃薯联合收获机在控制系统方面还存在许多不足之处,如传感器系统设计不够灵敏、电气控制系统设计不够稳定、机械控制系统设计不够精准等问题。
对马铃薯联合收获机的控制系统进行深入研究和优化设计具有重要意义。
本文旨在通过对马铃薯联合收获机控制系统的设计和改进,提高其生产效率和稳定性,为农业生产提供更好的支持。
通过研究控制系统的优化设计,可以为农业机械化发展提供新思路和方法,具有积极的推动作用。
1.2 研究目的研究目的是为了设计一套高效、精准的马铃薯联合收获机控制系统,以提高收获效率、减少劳动力成本和提升收获品质。
通过引入先进的传感器技术和电气控制系统,实现对马铃薯联合收获机各部分的实时监控和控制,从而提高作业效率和减少浪费。
通过机械控制系统的设计和优化,实现对马铃薯的轻柔收获,减少土壤破坏和损伤率,提高产品的市场竞争力。
数据处理与通讯系统的设计将实现数据的及时传输和分析,为决策提供支持,提高生产管理的效率和精准度。
通过本研究的开展,旨在为农业生产提供先进的技术支持,促进农业现代化进程,为农民增加收入、改善生产条件,推动农业可持续发展。
1.3 研究意义马铃薯联合收获机控制系统的设计与研究意义在于提高农业生产效率,降低劳动强度,减少人力资源消耗,增加农民收入。
随着农业现代化的发展,马铃薯生产规模不断扩大,传统的人工收获方式已无法满足需求。
研究马铃薯联合收获机控制系统,对提高马铃薯的生产效率和质量具有重要意义。
马铃薯联合收获机控制系统的设计可以实现自动化收获、高效能作业,最大限度地减少因人为操作而引起的误差。
马铃薯联合收获机控制系统设计

马铃薯联合收获机控制系统设计马铃薯是人们生活中常见的一种蔬菜,其栽培和收获一直是劳动强度大、效率低的农业工作。
随着科技的发展,人们对马铃薯的栽培和收获提出了更高的要求。
为了提高马铃薯的生产效率和质量,马铃薯联合收获机控制系统设计成为了迫切需要解决的问题。
一、马铃薯的收获方法传统的马铃薯收获方法是通过人工劳动进行收割,效率低下、劳动强度大。
而马铃薯联合收获机的出现,改变了这一现状。
马铃薯联合收获机是一种综合利用挖掘、震动、提升等动作,将地下马铃薯整株收获、卸土、清洗等工序集成在一起的机械设备,具有收获速度快、效率高、劳动强度小等优点。
1. 马铃薯联合收获机的动力系统马铃薯联合收获机的动力系统是整个机器的核心部分,它包括发动机、传动装置、液压系统等。
发动机作为动力源,通过传动装置将动力传递给各个部件,完成收获过程。
而液压系统则负责对机器的升降、振动等功能进行控制。
在设计控制系统时,需要合理安排各个零部件的工作参数,确保整个系统的正常运行。
挖掘系统是马铃薯联合收获机的关键部分,它直接影响着收获的效率和质量。
在设计控制系统时,需要考虑挖掘系统的工作深度、速度和力度等参数,以确保机器能够有效地挖掘马铃薯,并且不会损坏薯块。
清洗系统是保证马铃薯质量的关键部分。
在设计控制系统时,需要考虑清洗系统的水压、喷头布置、清洗时间等因素,确保马铃薯能够被充分清洗干净,避免土壤、杂质残留在薯块表面。
随着物联网、大数据、人工智能等技术的不断发展,马铃薯联合收获机的智能化控制系统也成为了可能。
通过传感器对马铃薯的成熟度、大小、形状等参数进行实时监测,配合智能控制算法,实现对收获机器的自动化调节和优化,使得机器能够根据实际情况进行精准操作,提高收获效率和质量。
1. 机械系统和电气系统的协调配合马铃薯联合收获机控制系统设计需要充分考虑机械系统和电气系统之间的协调配合。
一方面,机械系统的动作需要被准确地传达到电气系统,实现对各个部件的精准控制。
马铃薯联合收获机控制系统设计
马铃薯联合收获机控制系统设计本文主要介绍马铃薯联合收获机控制系统的设计。
马铃薯联合收获机是一种用于农业收获的机械设备,它能够在一定范围内自动收获马铃薯,从而提高农业生产效率。
为了保证高效的使用,本文设计了一个控制系统,该系统可以对马铃薯联合收获机进行控制。
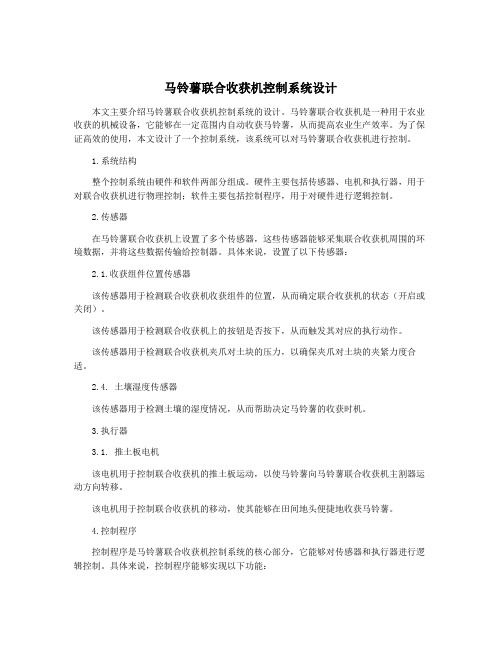
1.系统结构整个控制系统由硬件和软件两部分组成。
硬件主要包括传感器、电机和执行器,用于对联合收获机进行物理控制;软件主要包括控制程序,用于对硬件进行逻辑控制。
2.传感器在马铃薯联合收获机上设置了多个传感器,这些传感器能够采集联合收获机周围的环境数据,并将这些数据传输给控制器。
具体来说,设置了以下传感器:2.1.收获组件位置传感器该传感器用于检测联合收获机收获组件的位置,从而确定联合收获机的状态(开启或关闭)。
该传感器用于检测联合收获机上的按钮是否按下,从而触发其对应的执行动作。
该传感器用于检测联合收获机夹爪对土块的压力,以确保夹爪对土块的夹紧力度合适。
2.4. 土壤湿度传感器该传感器用于检测土壤的湿度情况,从而帮助决定马铃薯的收获时机。
3.执行器3.1. 推土板电机该电机用于控制联合收获机的推土板运动,以使马铃薯向马铃薯联合收获机主割器运动方向转移。
该电机用于控制联合收获机的移动,使其能够在田间地头便捷地收获马铃薯。
4.控制程序控制程序是马铃薯联合收获机控制系统的核心部分,它能够对传感器和执行器进行逻辑控制。
具体来说,控制程序能够实现以下功能:4.1.控制马铃薯收获组件的开启和关闭控制程序能够通过接收收获组件位置传感器的数据来判断马铃薯收获组件的开启和关闭状态,从而对其进行控制。
4.2.控制推土板的运动控制程序能够通过接收按钮传感器的数据来控制夹爪的运动,以捡起马铃薯。
4.4.控制联合收获机的移动综上所述,本文设计的马铃薯联合收获机控制系统可以对马铃薯联合收获机进行控制,从而提高农业生产效率。
第二节-联合收获机的一般构造和工作过程
配摘脱台旳联合收获机
4ZTL-1800型割前摘脱稻(麦)联合收获机简图
1.摘脱滚筒 2.压禾器 3.三角形板齿 4.固定板齿 5.管道 6.回收箱 7.拨指助推器 8.拨指 9. 滚筒 10.外壳 11.万向节 12.三角带轮 13.转臂 14.吊杆 15.补偿弹簧 16.立轴 17.曲拐轴 18. 分离箱入口 19.带式输送器 20.排料叶轮 21.横流风机 22.凹板 23.复脱装置 24.水平推运器 25.滚珠轴承 26.圆筒 27.立式推运器 28.进风口 29.承粮盘 30.排粮叶片 31.三角带轮 32.旋 转叶片 33.截顶圆锥面 34.圆筒有孔筛面 35.沉降室 36.气吸道 37.径向叶片 38.导管 39.管
道 40.吸运风机 41.支柱 42.推杆 43.挡板 44.销轴 45.往复切割器 46.搂草杆 47.卸粮口
4LZS-1.5型小型背负式谷物摘穗联合收获机构造简图 1.前护罩 2.摘穗滚筒 3.挡板 4.传动系统 5.输送螺旋 6.前 悬挂装置 7.拖拉机 8.升降系统 9.输送槽 10.后悬挂装置 11.链条 12.风扇 13.耙齿 14.脱粒滚筒 15.凹板 16.卸粮螺
二、全喂入式稻麦联合收获机
图7-3 全喂入稻麦联合收获机 1.拨禾轮 2.切割器 3.割台螺旋 4.操纵台 5.输送槽 6.拖拉机 7.卸粮口 8.风扇 9.滚筒 10.筛子 11.谷粒螺旋和扬谷器
三、收割机(立式割台)
半喂入悬挂式联合收割机(卧式割台)
四、割前脱粒联合收获机
旋 17.卸粮口 18.卸粮平台
第二节 联合收获机旳一般构造和工作过程
一.全喂入式小麦联合收获机 二.全喂入式稻麦联合收获机 三.半喂入式水稻联合收获机 四.割前脱粒联合收获机
马铃薯联合收获机控制系统设计

马铃薯联合收获机控制系统设计马铃薯是世界上最受欢迎的食物,马铃薯产量也在不断增加。
种植马铃薯需要大量人工劳动,特别是在收获和分类过程中,需要大量的人力和时间。
因此,设计一套高效的马铃薯联合收获机控制系统,节省时间和人力成本,提高收割效率和质量,具有重要的实际意义。
马铃薯联合收获机控制系统主要包括机械结构、传动系统、采收系统、控制系统等四个方面。
在机械结构方面,需要考虑收获机的体型和外形设计,为实现高效、精准、自动化的采收提供保障。
在传动系统方面,需要考虑传动机构的设计和选型,保证采收机器的动力和效率。
在采收系统方面,需要考虑采收机器对农作物的采收方式和采收深度,保证采收质量和产量。
控制系统方面,需要将各个系统部件相互协调,实现采收自动化和人机交互。
机械结构方面,马铃薯联合收获机的体积应该保持在一定的尺寸范围内,便于操作和便于收纳。
在机器结构的设计上,应该遵循人体工学原理,使得操作员可以更加舒适地进行操作。
机器的外形设计应该做到简单大方,易于清洗和维护。
传动系统方面,马铃薯联合收获机器需要具备强大的动力支持,传动机构应该精细设计,以达到高效稳定的运行状态。
传动系统一般采用液压和机械传动方式,选择适当的传动比和传动器件,使得机器的输出功率与输入功率相符合,达到合理的效率和能耗。
采收系统方面,马铃薯联合收获机器应该能够适应不同的地形和作物特点,这就需要采用可调节的采摘系统和一定的机器移动灵活性。
采摘器官采用先进的传感技术,能够准确地辨别目标物,执行精准的采收。
采摘深度设计应该根据马铃薯生长的地形斜度和土壤松硬程度来设计,以达到对马铃薯的保护和最大化采收量的目的。
控制系统方面,马铃薯联合收获机器应该采用先进的自动控制技术,以实现自动化采收和人机交互。
通过控制系统,可以对马铃薯联合收获机进行诊断和检测,提高机器的故障和运行状态的监测和管理,保证机器的高效稳定运行。
同时,采用智能化控制技术,可以实现机器的自动导航和自主采摘,提升采收质量和效率。
4LH-2型花生联合收获机设计与试验

由 发 动 机 、 架 、 走 机 构 、 作 系 统 组 成 。 发 机 行 操
动 机 采 用 3 5柴 油 发 动 机 , 大 功 率 2 . , 定 8 最 25kW 额 输 出 速 度 23 0rm 。变 速 箱 有 6个 档 位 , 速 一 档 5 p 低 为作 业 档 , 速 档 为道 路行 驶 档 。采 用 轮 式 宽轮 距 高
动 力 行 走 机 构 , 四驱 动 后 轮 转 向 ,轮 中 心 距 1
590m m 。
图 4 扶 禾 装 置
232挖 掘 装 置 采 用 长 方 形 倾 斜 平 面 铲 的 设 计 , .. 配 合 一 畦 两 行 左 右 配 置 , 定 在 机 架 两 侧 的 固 定 座 固 上 , 土 铲 尖 在 夹 持 拔 取 口稍 前 方 。 铲 柄 在 管 座 内 挖 可上 下 移 动 , 由螺 钉与 管 座 固定 。通 过 调 整挖 掘 并 点 、 土 深 度 及 铲 间 距 , 保 在 拔 取 植 株 前 铲 断 主 人 确
固树 立 以 人 为 本 、 全 发 展 的 科 学 理 念 , 保 护 人 安 把 民群众 的生 命 财 产 安 全 放 在 首位 , 服 困难 , 造 克 创
条件 , 努力开创农机安全管理工作新局面。 口
6 0 阿-表礼 2 1 年第6期 她 01
SHE ZHI AO Jl Z
后 输 送 ,而后 转 接 到秧 蔓 抛送 链 而 被 排 出机 后 , 完
SHE l ZA0 J ZHI
4 H 己型花生联台 收获i 设计 与试验 L一 I i 几
王进朝 ’ 陈思 刚 ’ 袁 求真 ’ 李 旭 华 : 1河 北 省 农 业 机 械 化 研 究 所 有 限 公 司 . 0 0 5 2河 北 省 电 力 勘 测 设 计 研 究 院 501 . 0 0 3 50 1
第二节马铃薯联合收获机的结构组成与工作原理

4、薯秧分离装置设计
弹性梳杆式薯秧分离装置结构简图 土薯分离带主动轮 2.定位杆 3.支撑轴
4.扭转弹簧 5.弹性梳杆 6.橡胶辊
皮带式薯秧分离装置结构图 1.土薯分离输送带 2.支撑抖动轮总成 3. 皮带压紧力调节弹簧
4. 从动皮带轮 5.皮带 6.土薯分离输送带驱动轮 7.摘薯杆 8.主动皮带轮 9.机架 10. 土薯分离输送装置
1、垂直提升装置
垂直提升装置结构简图 1.驱动链轮 2.导向链轮 3.从动链轮 4.张紧装置 5.提升链板
2、薯块分级及收集装袋装置
薯块分级及收集装袋装置结构简图 1.分级链板 2.接料斗组合 3.固定导轨 4.主动部件组合 5.活动导轨
6. 短辊轴组合 7. 长辊轴组合 8. 从动部件组合
三. 4U-1600马铃薯联合收获机
1-万向牵引装置,2-拉杆,3-切土圆盘刀,4-挖掘铲,5-挖掘铲架,6-一级土薯分 离输送装置,7-导秧板,8-摘薯辊,9-弹性梳杆,10-二级土薯分离输送装置,11从动轮,12-牵引链,13-刮板,14-导向轮,15-驱动轮,16-护罩,17-从动链轮, 18-分级链板,19-短辊轴,20-长辊轴,21-导轨,22-横向输送链条栅杆,23-辊轴 链式分级主动链轮,24-横向输送变速器,25-倾斜接料栅板,26-提升油缸,27-传 动轴,28-仿形镇压辊,29-机架,30-地轮,31-主变速器,32-接料装袋装置
一. 4U-1400FD型铃薯联合收获机
整机与拖拉机的配套方式为牵引式,动力全部由拖拉 机提供,行走和挖掘依靠拖拉机牵引,土薯分离输送、茎 秆分离、升运和分级等运动动力由拖拉机动力输出轴提供, 仿形碎土辊、挖掘铲体及一级土薯分离装置的升降由拖拉 机液压输出经油缸17操纵。
4U-1400型马铃薯联合收获机的设计
r a me t e r s o f e a c h d e v i c e w e r e d e t e r mi n e d t h o u g h t h e k i n e ma t i c a n ly a s i s nd a e x p e i r me n t s .T h e S o l i d w o r k s s o f t wa r e w a s
( C o l l e g e o fE n g i n e e r i n g,G a n s u A g r i c u l t u r a l U n i v e r s i t y ,L a n z h o u ,C , a n s u 7 3 0 0 7 0 ,C h i n a )
u s e d f o r d r a wi n g o u t t h e v i tu r a l s m p a l e ma c h i n e a n d c a r r i e d o u t t h e mo d e l v li a d a t i o n.T he r e Wa s n o i n t e r f e r e n c e b e we t e n
4 U一1 4 0 0型 马 铃薯 联 合 收获 机 的设 计
史 明明, 魏宏安 , 胡 忠强, 刘 星 , 杨小平
( 甘肃农业大学工学 院, 甘肃 兰州 7 3 0 0 7收获依靠人工或小型挖掘机 效率低 、 劳动 强度 大等 问题 , 设计 了4 U一1 4 0 0型马铃薯
第3 2 卷第 1 期 2 0 1 4年 1 月
干 旱 地 区 农 业 研 究
Ag r i c u l t u r a l Re s e a r c h i n t he Ar i d Ar e a s
胡萝卜联合收获机根叶分离切割装置的设计

目录摘要 (I)Abstract ........................................................................................................................................... I I 1 绪论.. (1)1.1研究课题的目的与意义 (1)1.2国外研究状况分析 (2)1.3国内研究状况分析 (3)1.4研究内容及设计要求 (4)2总体方案的确定 (6)2.1拟定的方案 (6)2.2总体方案的分析与确定 (7)2.3传动系统方案的确定 (8)2.4胡萝卜收获机切割装置方案的确定 (9)3 传动系统的设计计算 (12)3.1功率及传动比的分配 (12)3.1.1牵引速度 (12)3.1.2种植要求 (12)3.2减速器的选择 (13)3.3带传动部分的设计计算 (14)3.4带速的选择 (16)3.5传动轴的设计 (17)4 切割装置的设计 (19)4.1切割刀具的结构设计 (19)4.2切割装置的工作过程分析 (20)5 支撑架的设计 (24)6 结论 (25)参考文献 (26)致谢 (27)胡萝卜联合收获机根叶分离切割装置的设计摘要结合国内胡萝卜的种植模式及农艺要求,借鉴国外已有机型的机构功能原理,对一种偏置式胡萝卜联合收获机根叶分离切割装置进行了设计。
切割动力由拖拉机动力输出轴经减速器和传动装置获得,切割装置是由两组双曲柄多并行连杆机构组成,每一组机构均是由主动曲柄盘和从动曲柄盘的转动来带动六个结构尺寸相同的刀具连杆做往复合成运动。
根据联合收获机本身结构特点,合理地设计和布置两组机构的几何参数和工作参数,使两组刀具在工作过程中既不相互干涉,又能相互配合完成连续剪切的功能,对夹持输送带上的胡萝卜实现根叶的切割分离。
关键词:胡萝卜;联合收获机;传动装置;切割装置Design of Driving and Cutting Device Belonged to Carrot CombineAbstractAccording to the plant mode and agricultural requirement of carrot, a sort of cutting device used to separate roots and leaves of carrot was designed based on the principle of carrot harvest from foreign countries. The cutting power is derived from the P.T.O of tractor to reducer. Cutting devices consist of two set of connecting rode, and each connecting rode includes six same cutters which take composite motion with the drive of crank plate. Based on the structural characteristics of the carrot harvester, geometric parameters and work parameters of the cutting device were reasonably designed, so as that the cutters can operate the continually cutting function under the condition of no interference with each other. Carrot roots can be separate from leaves successfully by the cutting device.Key words : carrot; combine harvester; driving device; cutting device1 绪论1.1研究课题的目的与意义胡萝卜作为主要经济作物之一,在全球分布较广,我国是全世界胡萝卜收获面积最多的国家,总产量占世界胡萝卜总产量的1/3。
自走轮式谷物联合收获机(全喂入)的自动化控制系统设计与实现
自走轮式谷物联合收获机(全喂入)的自动化控制系统设计与实现随着农业自动化的发展,自走轮式谷物联合收获机(全喂入)已经成为现代农业技术中不可或缺的一部分。
为了满足日益增长的农产品需求并提高生产效率,设计与实施一个高效的自动化控制系统变得至关重要。
本文将主要讨论自走轮式谷物联合收获机(全喂入)的自动化控制系统的设计原理、关键组件和实施方案。
首先,自动化控制系统的设计需要考虑机械结构、传感器、执行器和控制器之间的紧密协作。
机械结构包括收割头、喂入装置、清洁装置等,这些部件需要与控制系统无缝集成。
传感器用于收集关于作物高度、土壤湿度、作物密度和储量等信息。
执行器负责实施采集到的数据进行相应的操作,如调整机械结构的工作状态或速度。
控制器则负责协调传感器和执行器之间的信息流动,并根据预设的算法和策略做出决策。
其次,为了实现高效的自动化控制系统,我们需要考虑以下关键组件:1)全喂入感应器:利用激光测距技术或摄像头识别算法,实时监测谷物的高度和密度,通过与控制器的信息交换,确保谷物被完全收割和引导到喂入装置;2)控制器及决策算法:根据传感器收集到的数据进行决策,调整机械结构的工作状态,控制收割头的高度和速度,以及优化废弃物的清理过程;3)移动与定位系统:利用全球定位系统(GPS)和惯性导航系统,确保自走轮式谷物联合收获机(全喂入)能够在田间准确行驶,并充分利用宽敞的田地。
最后,为了实现自走轮式谷物联合收获机(全喂入)的自动化控制系统,我们可以采取以下实施方案:1)硬件搭建:选用高精度的传感器和执行器,确保数据的准确性和操作的精确性;2)软件开发:根据具体需求开发控制器的决策算法,采集并分析来自传感器的数据,并与移动与定位系统进行组合,为自走轮式谷物联合收获机提供行走路径、收割深度和速度等决策指导;3)实地测试与优化:在实际农田进行测试,并根据实际操作情况调整算法和系统参数,优化控制系统的性能。
值得注意的是,在实施自动化控制系统时,我们需要充分考虑谷物联合收获机的可靠性和安全性。
联合收割机行走装置设计
摘要履带式联合收割机的行走性能决定了它在农田中作业明显的优势,履带大的接触面积用于提高在湿软地上的通过性能,同时防止沉陷,打滑。
同时橡胶履带是一种新型橡胶传动带,具有接地压强小、牵引力大等诸多优点,其主要应用于农业机械。
在设计的过程中要考虑要考虑收割机跨沟,跨田埂的能力,还需要有良好的机动性能,对于南方的小田地来讲,要求收割机有较小的转弯半径并且转弯性能要好,这样也有利于提高机组的工作效率。
在设计中需要计算履带长度,驱动轮,从动轮大小,以及驱动轮轴的设计等。
关键字:履带;行走装置;收割机ABSTRACTCrawler walking of the combine harvester performance determines its obvious advantages in the farmland homework, caterpillar large contact area for the increase in soft ground by performance, at the same time prevent subsidence and slippage. Rubber tracks is a new type of rubber belt at the same time, the advantages of small ground pressure, big traction, and many other advantages, the main application in agricultural machinery. Want to consider to consider in the design process of harvester cross ditch ,across the ability of, you also need to have good maneuver performance, for the southern small fields, requires the harvester has a smaller turning radius, and turning performance is better, this also is helpful to improve the work efficiency of the unit. Is needed in design calculation length of track, driving wheel and driven wheel size, as well as the design of the drive shaft and so on.Key word :caterpillar ; Walking device ; harvester目录1 绪论 (1)1.1 国内收获机械发展概况 (1)1.2 国外收获机的发展概况 (2)2 联合收割机行走装置选择的条件 (2)2.1 选择履带式行走机构的理由 (3)2.2 履带的作用 (3)2.3 对履带设计的要求 (3)2.4 选择履带的材料 (3)2.5 履带式联合收割机行走装置的组成 (3)2.6 小型水稻联合收割机行走装置的特点 (4)2.7 履带式行走装置的行走原理 (4)3 悬架的选用 (5)3.1 悬架的概念 (5)3.2 悬架的作用 (5)3.3 设计时对悬架的要求 (5)3.4 悬架的类型 (5)3.5 各种悬架的特点 (5)3.6 悬架的选用 (5)4 橡胶履带的设计与规格的选用 (6)4.1 橡胶履带的特点 (6)4.2 橡胶履带的构造 (6)4.3 橡胶履带规格的选择 (7)5 驱动轮的设计 (10)5.1 驱动轮的的配置 (10)5.2 驱动轮节距的定义 (10)5.3 驱动轮相关参数的计算 (11)5.4 驱动轮其它参数的确定 (12)5.5 确定驱动轮齿槽形状 (13)5.6 驱动轮的强度计算与校核 (15)6 制动器的设计 (16)6.1 制动分类 (16)6.2 制动器的分类 (16)6.3 按结构型式分类 (16)6.4 制动器的选用 (16)6.5 制动器性能的验算 (18)7 轴的设计 (19)7.1 轴的分类 (19)7.2 拟定轴上零件装配方案 (19)7.3 计算各轴段的直径和长度 (19)7.4 轴的校核 (20)8 支重轮的设计 (22)8.1 支重轮的作用 (22)8.2 对支重轮设计的要求 (22)8.3 支重台的选用 (23)8.4 支重轮的型式 (23)8.6 支重轮材料的选择 (24)9 托轮的设计 (24)9.1 托轮的作用 (24)9.2 托轮的安装位置 (24)10 导向轮的设计 (24)10.1 导向轮的作用 (24)10.2 如何选择导向轮 (25)11 张紧装置的设计 (25)11.1 张紧装置的作用 (25)11.2 张紧装置的形式 (25)11.3 张紧装置的调整 (27)11.4 减震弹簧的设计 (27)11.5 弹簧的选择 (28)11.6 验算弹簧疲劳强度及静安全系数 (30)12 履带联合收割机性能的计算分析 (31)12.1 收割机的受力 (31)12.2 收割机的行走特性 (32)13 履带联合收割机的转向性能与分析 (32)13.1 转向时联合收割机以及履带的运动情况 (34)13.2 转向时履带与土壤相互作用分析 (35)参考文献 (37)致谢 (38)1 绪论作物收获是整个农业生产过程中夺取丰收的最后一个重要环节,对谷物的产量和质量都有很大的影响,其特点是季节性强、时间紧、任务重,易遭受雨、雪、风、霜的侵袭而造成损失。
马铃薯联合收获机控制系统设计

马铃薯联合收获机控制系统设计马铃薯是一种重要的农作物,广泛种植于世界各地。
马铃薯的收获是一个繁重的工作,传统的收获方式主要是依靠人工劳动,效率低下,成本较高。
因此研发一种高效、自动化的马铃薯联合收获机成为了一个重要的课题。
本文将着重介绍马铃薯联合收获机的控制系统设计。
一、系统结构设计马铃薯联合收获机主要由收获机构、传送机构、清洗机构、分类分选机构、控制系统等部分组成。
控制系统起着至关重要的作用,它通过对各个部件的控制,实现对马铃薯的高效收获和处理。
1. 收获机构:收获机构是马铃薯联合收获机的核心部分,主要由挖掘刀、输送带等部件组成。
收获机构的工作原理是通过挖掘刀将马铃薯从土壤中挖取,并通过输送带将其传送至后续的处理部分。
2. 传送机构:传送机构主要由输送带和输送轨道组成,其作用是将挖取的马铃薯高效地传送至后续的清洗和分类分选机构。
3. 清洗机构:清洗机构主要由清洗装置和输送带组成,其作用是对挖取的马铃薯进行清洗,去除土壤和杂质。
4. 分类分选机构:分类分选机构主要由输送带、分选装置等组成,其作用是根据马铃薯的大小和品质对其进行分类分选,以便后续的包装和销售。
5. 控制系统:控制系统是整个马铃薯联合收获机的大脑,它通过对各个部件的控制,实现对马铃薯的高效收获和处理。
控制系统的设计是本文的重点内容,下面将对其进行详细介绍。
二、控制系统设计1. 控制系统的功能要求(1)实时监测各个部件的运行状态,及时发现故障并报警。
(2)实现对收获机构、传送机构、清洗机构、分类分选机构等部件的精确控制,保证马铃薯的高效收获和处理。
(3)实现对马铃薯的分类分选,将符合要求的马铃薯送至包装区,提高产品的品质和降低成本。
2. 控制系统的硬件设计控制系统主要由PLC(可编程逻辑控制器)、传感器、执行器等硬件组成。
传感器主要包括光电传感器、压力传感器、温度传感器等,用于实时监测马铃薯的状态和各个部件的运行状态。
执行器主要包括电机、气缸等,用于对各个部件进行精确控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业论文(设计) 论文图纸Qq:2245969237题目:联合收获机的设计姓名:学院:机电工程学院专业:机械设计制造及其自动化班级:学号:指导教师:年月日毕业论文(设计)诚信声明本人声明:所呈交的毕业论文(设计)是在导师指导下进行的研究工作及取得的研究成果,论文中引用他人的文献、数据、图表、资料均已作明确标注,论文中的结论和成果为本人独立完成,真实可靠,不包含他人成果及已获得青岛农业大学或其他教育机构的学位或证书使用过的材料。
与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
论文(设计)作者签名:日期:年月日毕业论文(设计)版权使用授权书本毕业论文(设计)作者同意学校保留并向国家有关部门或机构送交论文(设计)的复印件和电子版,允许论文(设计)被查阅和借阅。
本人授权青岛农业大学可以将本毕业论文(设计)全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本毕业论文(设计)。
本人离校后发表或使用该毕业论文(设计)或与该论文(设计)直接相关的学术论文或成果时,单位署名为青岛农业大学。
论文(设计)作者签名:日期:年月日指导教师签名:日期:年月日目录摘要 ......................................................................................................... 错误!未定义书签。
Abstract ........................................................................................................ 错误!未定义书签。
1绪论 (1)1.1选题目的与意义 (1)1.2国内外发展概况 (1)1.3研究方案的确定 (2)2大豆联合收割机的总体设计 (3)2.1整机结构 (3)2.2大豆联合收割机的总体布置 (3)2.3确定整体参数 (4)2.4确定大豆联合收割机的功率消耗及发动机选择 (7)2.5传动装置的设计 (8)3各工作部件的设计 (10)3.1切割器 (10)3.2拨禾轮 (10)3.3拨指、螺旋推运器 (12)3.4中间输送装置 (13)3.5脱粒滚筒 (13)3.6分离装置 (14)3.7清选装置 (16)3.8联合收割机底盘 (18)4 传动部件及轴的设计 (22)4.1 风扇轴带传动设计 (22)4.2 轴的设计 (26)5总结 (29)参考文献 (30)致谢 (31)大豆收获机的设计指导教师摘要目前国内大豆联合收割机多由小麦收获机改装而成,由于大豆植株特性与小麦植株特性有一定差异,使得运用改进后的收获机收获大豆损失率较高。
本文设计一台大豆联合收获类机械,可连续完成大豆的切割、脱粒及清选工作。
该机根据大豆植株的生长特性选用带有中间喂入轮的双滚筒脱粒装置,谷物先输送入钉齿滚筒,由滚筒相对谷物的冲击速度及凹板间的摩擦将绝大部分谷粒脱净,然后进入纹杆滚筒,对作物再次进行速度冲击,确保作物脱粒干净,较好地降低了大豆收获损失率,并解决了丘陵、山地等难收获的问题。
本设计采取自走式、全喂入、双滚筒脱粒装置收获大豆,具备损伤率低,损失率低,清选性好的优势。
关键词:大豆;切割装置;脱粒装置;清选装置Design Of Soybean HarvesterStudent majoring in mechanical engineering and automTutorAbstractAt present domestic soybean combine multiple by wheat combine harvester modification and, due to the soybean plant characteristics and wheat plant properties have some differences, making use modified combine soybean harvest loss rate is higher. The design requirements is designed to fit in the soybean harvest harvester machinery, which can continuously complete soybean cutting, threshing and cleaning work.The machine according to the growth characteristics of soybean plants with low cut flexible cutting device, and the use of double drum device with intermediate wheel, a first cylinder for spiked drum, strike and rub the Beanstalk, second cylinder for rasp bar cylinder, two hit the Beanstalk, ensure full threshing, to the Selection, better solves the soybean harvest loss rates are high, as well as the reaper in the hills, mountain difficult to harvest problem. The machine by self-propelled, feeding, double drum reaping and threshing device, with the clean threshing, low broken rate, the loss rate is low, advantage of the good performance of the separation.Key words:overall design ;cutting device ;threshing device ;cleaning device1绪论1.1选题目的与意义在我国大豆分布广泛、营养丰富,其作为健康食品正在全球引起消费热潮。
由于我国大豆产量满足不了大众需求,大豆收获损失率较高,使国内大豆市场仍依靠进口,不仅要消耗大量的外汇储备,同时使我国食物供应安全存在威胁。
收获是作物种植的关键部分,它很大程度上制约作物的质量及产量。
当前我国大豆收割还是用人工收割、割晒机加脱粒机械及改装后的小麦联合收割机收割三种收获方式为主,农村小规模种植一般采取人工收获,作业周期长,耗费劳动力较大,劳动环境较差,成本较高。
选用“割晒机加脱粒机械”收割,存在作业时间跨度长,过程复杂,损失率较高,劳动力消耗较大等不足[1]。
采用改装后的小麦联合收割机收获,可降低劳动强度,但是籽粒破碎率及损失率较高。
大豆收获的季节特征显著,收获时间紧张,采取人工收获所需的劳动强度较高,工作环境差,成本及时间花费较多,使得大豆收获机的出现成为必然。
目前国内生产的联合收获机多为小麦、水稻及玉米收获机等,对于大豆收获适应性较差,专用于大豆的联合收获机很少,收获大豆大都是在原有谷物联合收割机的基础上改装而成,而大豆的植株及颗粒状态与谷物有着很大的区别,用同一类型的机器收割,影响收获的质量及产量[2]。
围绕着东北地区大面积的大豆收获问题,设计一台中大型适合东北地区大豆收获的机械,可以减少损失,节能降耗,减轻劳动力,提高生产率及生产质量,从而创造良好的经济效益。
1.2国内外发展概况在联合收获时代未到来之前,脱粒机和小型割晒机等,极大促进了19世纪的农业发展,联合收获机的产生,将切割与脱粒连接在一起,使得能一次性完成作物的切割和脱粒工作,极大降低了人们的收获作物的工作强度。
目前国内大豆联合收割机多由小麦收获机改装而成,由于大豆植株特性与小麦植株特性有一定差异,使得运用改进后的收获机收获大豆损失率较高,在很大程度上制约作物的质量及产量[3]。
近年来,外企在大豆联合收割机的割台设计上有较多改进,主要还是围绕大豆植株特性,设计出更适合大豆收割的挠性低割装置,在其它方面也有很多技术改进,如安装功率较大的发动机、安装电子信息系统等[4]。
综述,国外联合收获机的发展态势,是逐渐往高自动化收割作物的方向发展,有很多电子信息科学运用到了联合收获机上,在越来越多的新技术融入到联合收获机的同时,我们也应清楚地知道联合收获机归根结底还是落在降低损失率、破损率,提高粮食的清洁率,所以按照大豆植株特性研究出适合大豆专用的收获机械具有很大意义,该课题通过归纳总结现有的谷物收获机械,设计出适合大豆生产的专用机械。
1.3研究方案的确定1.3.1研究内容在收集大量相关的大豆收获资料并进行分析研究,找出在收获工艺中的主要难题,探讨工艺方案的可行性。
要求设计的大豆收获机要符合农业技术要求,能够一次完成切割、脱粒、清选等作业环节。
达到省工、省时、省事,符合大豆的收获要求,降低收获损伤率,提高工作效率。
1.3.2研究方法检索和查阅大量相关信息,对各种大豆收获机进行比较分析,确定大豆收获机的结构组成由切割装置、脱粒装置、清选装置组成。
各装置相互配合完成大豆的收获作业。
运用机械优化设计的方法,合理的确定各个工作部件的角度,尺寸及结构形式。
在理论分析中将基础性研究和机械运用合理的结合起来,切实做到理论联系实际,理论运用实践。
1.3.3技术路线调查研究→确定总体方案→工作机理分析→主要工作部件的设计→切割及脱粒装置的设计→计算和校核→撰写论文→绘制图纸→修改图纸及论文→申请答辩。
2大豆联合收割机的总体设计要求该大豆联合收获机能连续进行大豆的切割、脱粒及清选作业。
满足收获的质量要求:割茬高度控制在5~6mm,切割损失率不超过1%,脱粒损失率不超过2%,破损率不超过5%,清洁率要高于95%[5]。
该机根据大豆植株的生长特性选用带有中间喂入轮的双滚筒脱粒装置,谷物先输送入钉齿滚筒,由滚筒相对谷物的冲击速度及和凹板间的摩擦将绝大部分谷粒脱净,然后进入纹杆滚筒,对作物再次进行速度冲击,确保作物脱粒干净,很好地避免了大豆收获损失率高以及收获机在丘陵、山地等难收获的问题。
本设计采取自走式、全喂入、双滚筒脱粒装置收获大豆,具备损伤率低,损失率低,清选性好的优势。
2.1整机结构本设计的联合收获机由行走及收获两方面构成,行走部分为四轮形式,驱动形式采用前轮驱动,使用人字橡胶轮,从发动机到变速箱使用单片摩擦式离合器来传动动力,变速箱模仿东方红-75拖拉机变速箱,采用后轮转向,通过转向盘经过转向摇杆及转向节来控制转向。