爱普生机械手控制器
Epson机械手调整手顺OK

调整完成后将 OPU-300 上的钥匙拨回来,此时 OPU-300 的右上角 显示为“OPU”即可。
特 定 故 障 调 整 手 顺
设备名称 故障内容 EPSON 机械手 投入点位偏差 三 调整前的准备 检查一下 OPU-300 上的几个指示灯, 其中 Motor On 灯应亮, 所有红灯均应该灭。 (如 果 Motor On 的灯没有亮, 可使用 TP300 开启马达, 具体做法是: 同时按下‘Shift’ 键和‘M On’键。Motor On 灯亮了后,按下 MCAL 键,按回车键使机械手自动找原点。 ) 四 调整点的位置 按下 JUMP 键,此时 TP300 的屏幕上显示为“JUMP P ” ,直接按下数字键给出位置 点,按下回车键,机械手会缓慢的移向指定的点的位置。此过程中应注意不要让机械手碰到 设备上其他部分。 还有一种调节的方法安全系数更高:按下 JUMP 键和数字键后,同时按下‘Shift’键 和‘Z:0’键,此时屏幕显示为“JUMP P ** Z :0” (**为指定的位置点的数字) 。按 操 下回车键后机械手会移动到指定的位置点但 Z 轴不会动即不会下降,以保证不会碰到托盘 作 步 上。 骤 及 注 意 事 项 制定者 审核者 曹磊 编号 页号 2/3
TP300 上的 X,Y,R 的方向如上图 Z 轴正方向为向上 改变步距的方法:按下 SEL 键,选择 0、1、2、3 中的一个按下相应的数字键。各数字键 代表的意义是:0,每按一下 移动量是 0.03mm;1,每按一下移动量是 0.1mm;2,每按一 下移动量是 1mm;3,每按一下移动量是 10mm。
特 定 故 障调 整 手 顺
设备名称 故障内容 制定者 审核者 编号 页号 3/3
接极子/骨架工序成型机的点位分别为 P1(原位) ,P2(投入 1) ,P3 (投入 2) ,P4(投入 3) ,P5(投入 4) ,在上述各个点位的垂直上方分别 有点位 P11,P12,P13,P14,P15。 接极子/骨架工序分断机的点位分别为 P1(原位) ,P2,P10,P11,P12 (托盘上的三点定位坐标点) 。 五 调整后点位置的保存 调整好点的位置后按下 P*键,输入点的位置的数字**,按回车键确 认,此时点的位置就被存下了。存储时注意不要输错点位置的数字代码, 操 作 步 骤 及 注 意 事 项 否则会将点弄错,如将 2 错按成了 3 则将 P3 点原来的值覆盖而 P2 点还 是调整前的位置。 六 调整过程中可能遇到的问题 如果在调整中出现 Error 报警,可按下 TP300 上的 RESET 键,按 回车键,同时按下‘Shift’键和‘M On’键,待 Motor On 灯亮了后, 按下 MCAL 键,按回车键使机械手自动找原点,消除报警。 使用 TP300 调整骨架和接极子成型机时,由于设备上没有机械手 爪闭开关,无法使机械手在 TEACH 状态下吸起铁芯到投入位置,不便于 调整。此时可按下 TP300 上的 ON 键,显示器上显示“ON ** ”按下数字 键 1 和 6,按回车键,表示强制使控制器的 Y16 为 ON,重复按下 ON,1, 8 键,回车键,使 Y18 为 ON,此时机械手就会将铁芯吸起。关闭 Y16 和 Y18 的方法为:按下 OFF 键和数字键 1、6,按回车键确认,此时 Y16 被 关闭。Y18 的关闭方法一样。
爱普生机器人PROFINET设置
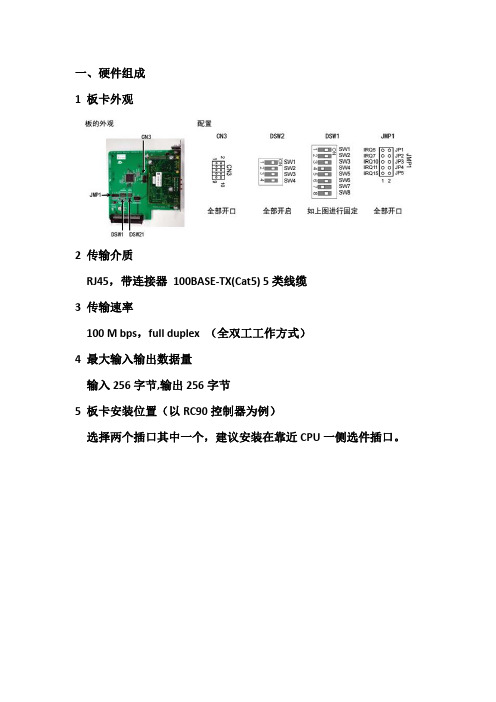
一、硬件组成
1板卡外观
2传输介质
RJ45,带连接器100BASE-TX(Cat5)5类线缆
3传输速率
100M bps,full duplex(全双工工作方式)
4最大输入输出数据量
输入256字节,输出256字节
5板卡安装位置(以RC90控制器为例)
选择两个插口其中一个,建议安装在靠近CPU一侧选件插口。
二、软件设置部分
1输入输出字节数
板卡如果安装完成,控制器正常自动识别板卡,如果不能自动识别请检查板卡安装。
根据点位要求设置1-256字节(和PLC或者其他主站控制器保持一致,DAP模式对于新版本控制器一般默认选择Ver.2
2PLC软件设置
首先把RC软件中得GSD文件找到提供给PLC或者其他主站控制器,机械手控制器是RC90就选择RC90的GSD文件
以西门子S7-1200为例,在设备概览中Interface表示设备已经建立连接,在组合输入输出状态时,请先分配输出状态,地址范围和机械手设置的字节数相同
三、板卡LED灯状态说明
1正常状态下LNK/ACTLED绿灯闪烁说明PLC或者其他主站已经和控制器建立通讯连接。
2正常状态下MS和CS LED绿色灯亮,如果MS红灯亮请检查PLC 分配地址是否正确或者IP地址设置等。
爱普生机器人原点校准方法
爱普生机器人原点校准方法Coca-cola standardization office【ZZ5AB-ZZSYT-ZZ2C-ZZ682T-ZZT18】E P S O N机械手脉冲零点校正一、工具:钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。
二、应用场合:1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。
2.更换马达等其他问题。
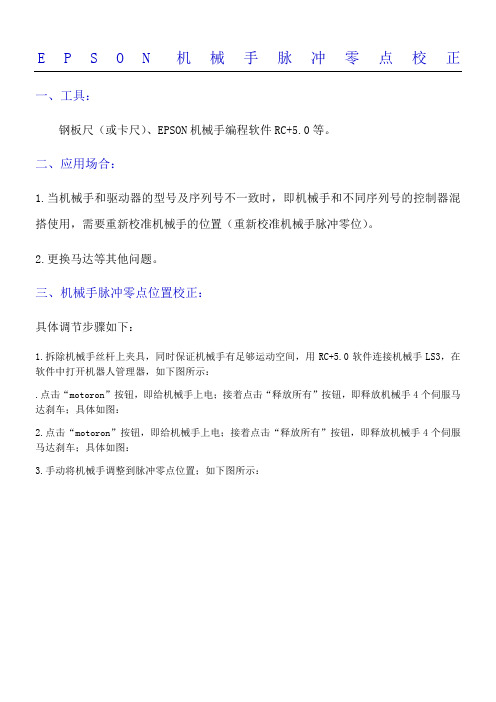
三、机械手脉冲零点位置校正:具体调节步骤如下:1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示:.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:2.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:3.手动将机械手调整到脉冲零点位置;如下图所示:+Z方向+X方向+Y方向具体细节:1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示:2)同理,手动移动丝杆使3、4轴如图所示:(U轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。
)3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motoroff”按钮,即关闭机械手;具体如图:4.保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M)中输入:Encreset1按回车Encreset2按回车Encreset3按回车Encreset3,4按回车如图:5.保持机械手目前手动零点位置不动,重启控制器,具体操作如图:6.保持机械手目前手动零点位置不动,在命令窗口中输入Calpls(脉冲零点位置的正确脉冲值)回车,具体如下:Calpls0,0,0,0回车.如下图:8.保持机械手目前手动零点位置不动,保存各个轴当前的脉冲值,具体是在软件中打开命令窗口(ctrl+M)中输入:calib1按回车1轴calib2按回车2轴calib3按回车3轴calib3,4按回车4轴(如只需校第一轴,calib1即可,以上将4个轴都校正)机械手脉冲零点的脉冲保存完成,效正基本完成。
爱普生培训资料:EPSON机械手软件操作指南
四、RC+5.4.3软件操作 (5)在“点数据”页面单击“保存”按钮,完成示教点。
四、RC+5.4.3软件操作
五、 马达重置及伺服OFF
工具 →机器人管理器→控制面板或单击工轴刹车释放后要按住 伺服指示灯旁边白色按
钮才能手动移动Z轴
运行功率设置
四、RC+5.4.3软件操作
1、 示教点步骤
(1)在“点数据”页面中“点文件”下拉菜单中选择需要教点的点文件
单击选择点文件
四、RC+5.4.3软件操作
(3)微动将机械手移动的需要示教点的位置。如果是SCARA机械手,Motor On情况下,可以在 Control Panel 页面Free All释放所有轴后,手动将机械手移动需要示教点的位置后,Lock ALL锁定所有轴。
EPSON机械手软件操作指南
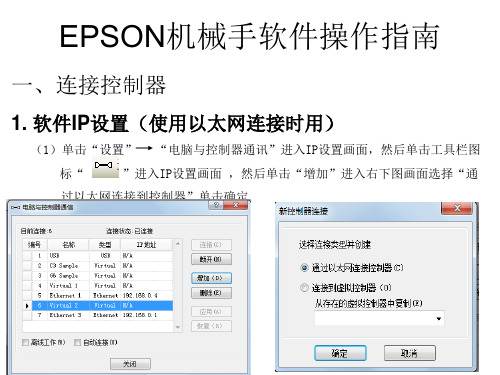
一、连接控制器
1. 软件IP设置(使用以太网连接时用)
(1)单击“设置” “电脑与控制器通讯”进入IP设置画面,然后单击工具栏图
标“
”进入IP设置画面 ,然后单击“增加”进入右下图画面选择“通
过以太网连接到控制器”单击确定
四、RC+5.4.3软件操作
(2)设置新增以太网连接名称及IP地址 ,控制器出厂默认控制器IP设置如右下图所示 设置好IP后单击应用,如果控制器IP忘记了,可以先用USB线连接控制器然后在 “设置”|控制器|configuration里可以查看控制器IP,电脑IP的前三位要与控制 器的前三位相同,例如“192.168.0.10”
四、RC+5.4.3软件操作 2、选择“控制器”单击“下一个”进入如下画面
四、RC+5.4.3软件操作
3、修改程序名称(可不修改)设定存储磁盘后,单击“下一个” 进入如下画面,然后单击“导入”即可将控制器内的程序读取出 来。
爱普生机器人原点校准方法
E P S O N机械手脉冲零点校正一、工具:钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。
二、应用场合:1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。
2.更换马达等其他问题。
三、机械手脉冲零点位置校正:具体调节步骤如下:1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示:.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:2.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:3.手动将机械手调整到脉冲零点位置;如下图所示:具体细节: 1)J1与J2轴,手动拖动使J1与J2轴如下图所示:2)同理,手动移动丝杆使3、4轴如图所示:(U 轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm ,用钢尺量,相差在2mm 内可接受。
)3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motoroff ”按钮,即关闭机械手;具体如图:4.保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M )中输入:Encreset1按回车Encreset2按回车Encreset3按回车Encreset3,4按回车如图:5.保持机械手目前手动零点位置不动,重启控制器,具体操作如图:6.保持机械手目前手动零点位置不动,在命令窗口中输入Calpls (脉冲零点位置的正确脉冲值)+X方向 +Z方向回车,具体如下:Calpls0,0,0,0回车.如下图:8.保持机械手目前手动零点位置不动,保存各个轴当前的脉冲值,具体是在软件中打开命令窗口(ctrl+M)中输入:calib1按回车1轴calib2按回车2轴calib3按回车3轴calib3,4按回车4轴(如只需校第一轴,calib1即可,以上将4个轴都校正)机械手脉冲零点的脉冲保存完成,效正基本完成。
爱普生 RC90 RC90-B 机器人控制器使用手册说明书

Rev.27C1M212C4575F机器人控制器RC90 / RC90-B(EPSON RC+ 7.0)机器人控制器RC90 / RC90-B (EPSON RC+ 7.0)Rev.27 ii机器人控制器RC90 / RC90-B(EPSON RC+ 7.0)Rev.27Copyright © 2013-2021 SEIKO EPSON CORPORATION. All rights reserved.RC90 / RC90-B (EPSON RC+ 7.0) Rev.27i前言感谢您购买本公司的机器人系统。
本手册记载了正确使用示教器所需的事项。
使用系统之前,请阅读本手册与相关手册,正确地进行使用。
阅读之后,请妥善保管,以便随时取阅。
保修本机及其选装部件是经过本公司严格的质量控制、测试和检查,并在确认性能满足本公司标准之后出厂交付的。
在交付产品的保修期内,本公司仅对正常使用时发生的故障进行免费修理。
(有关保修期方面的信息,请与当地销售商联系。
)但在以下情况下,将对客户收取修理费用(即使发生在保修期内):1. 因不同于使用说明书内容的错误使用以及使用不当而导致的故障与损伤。
2. 客户擅自改造或拆卸造成的故障。
3. 因调整不当/擅自修理而导致的损坏。
4. 因地震、洪水等自然灾害导致的损坏警告、注意、使用:1. 如果机器人或相关设备的使用超出本手册所述的使用条件及产品规格,将导致保修无效。
2. 本公司对因未遵守本手册记载的“警告”与“注意”而导致的任何故障或事故,甚至是人身伤害或死亡均不承担任何责任,敬请谅解。
3. 本公司不可能完全预见危险与故障发生的所有状况,此可预见性存在局限性。
因此,本手册不能警告用户所有可能的危险。
ii RC90 / RC90-B (EPSON RC+ 7.0) Rev.27商标Microsoft、Windows、Windows 图标是美国Microsoft Corporation 在美国及其他国家的注册商标或商标。
epson机械手程序讲解
epson机械手程序讲解Epson机械手程序讲解Epson机械手是一种先进的自动化设备,广泛应用于工业生产线上。
它的功能强大,可以完成各种复杂的任务,如搬运、装配和焊接等。
今天,我将为大家详细介绍Epson机械手的工作原理和程序控制。
我们来了解一下Epson机械手的结构。
它由基座、臂、手和手指组成。
基座固定在工作台上,臂连接在基座上,并可以在三个方向上移动。
手则连接在臂的末端,并具有多个关节,使机械手可以灵活地移动和旋转。
手指用于抓取物体,具有可调节的力量和灵敏度。
Epson机械手的程序控制是通过编程实现的。
在编写程序之前,我们首先需要对任务进行分析和规划。
然后,我们可以使用Epson机械手的编程软件来编写程序。
编程软件提供了一系列的指令,可以控制机械手的各种动作,如移动、旋转和抓取等。
在编写程序时,我们需要考虑机械手的安全性和效率。
为了确保机械手的安全操作,我们需要设置一些限制条件,如最大速度和力量。
此外,我们还可以使用传感器来检测环境和物体,以避免碰撞和损坏。
一旦程序编写完成,我们就可以将其加载到机械手的控制器中。
控制器是机械手的"大脑",负责解析和执行程序。
一旦程序开始执行,机械手将按照指定的路径和动作进行操作。
通过不断的反馈和调整,机械手可以高效地完成任务。
Epson机械手的运行速度和精度非常高,可以大大提高生产效率和质量。
它可以在短时间内完成大量的工作,而且准确无误。
与传统的人工操作相比,机械手可以减少人力成本和劳动强度,并提高工作环境的安全性。
总结一下,Epson机械手是一种功能强大的自动化设备,可以完成各种复杂的任务。
通过编写程序和控制器的实施,机械手可以高效地工作,并提高生产效率和质量。
它为工业生产线带来了巨大的改变,使生产过程更加安全、快速和精确。
相信随着技术的不断发展,Epson机械手将会在更多领域得到应用。
爱普生机器人原点校准办法
爱普生机器人原点校准办法Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】EPSON机械手脉冲零点校正一、工具:钢板尺(或卡尺)、EPSON机械手编程软件RC+5.0等。
二、应用场合:1.当机械手和驱动器的型号及序列号不一致时,即机械手和不同序列号的控制器混搭使用,需要重新校准机械手的位置(重新校准机械手脉冲零位)。
2.更换马达等其他问题。
三、机械手脉冲零点位置校正:具体调节步骤如下:1.拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用RC+5.0软件连接机械手LS3,在软件中打开机器人管理器,如下图所示:.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:2.点击“motoron”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手4个伺服马达刹车;具体如图:3.手动将机械手调整到脉冲零点位置;如下图所示:+Z方向+X方向+Y方向具体细节:1)因为刹车释放后,手动可以拖动J1与J2轴,手动拖动使J1与J2轴如下图所示:2)同理,手动移动丝杆使3、4轴如图所示:(U轴0位,丝杆端面对应外套上的指针;丝杆底部端面到机体底部为75mm,用钢尺量,相差在2mm内可接受。
)3.保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motoroff”按钮,即关闭机械手;具体如图:4.保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体是在软件中打开命令窗口(ctrl+M)中输入:Encreset1按回车Encreset2按回车Encreset3按回车Encreset3,4按回车如图:5.保持机械手目前手动零点位置不动,重启控制器,具体操作如图:6.保持机械手目前手动零点位置不动,在命令窗口中输入Calpls(脉冲零点位置的正确脉冲值)回车,具体如下:Calpls0,0,0,0回车.如下图:8.保持机械手目前手动零点位置不动,保存各个轴当前的脉冲值,具体是在软件中打开命令窗口(ctrl+M)中输入:calib1按回车1轴calib2按回车2轴calib3按回车3轴calib3,4按回车4轴(如只需校第一轴,calib1即可,以上将4个轴都校正)机械手脉冲零点的脉冲保存完成,效正基本完成。
爱普生机器人选型以及详细安装参数

EPSON 机械手综合商品目录信赖产生进步爱普生机械手爱普生机械手起始于1981年开发SEIKO手表的组装机械手。
当时开发的目标是制造出前所未有的能够髙精度、高效率地安装精密部件的机械手。
此后的各种技术经验继承了原有的爱普生机械手所具有的高精度、高速度和高可靠性,在此基础上我们正向着 节省技术(节省空间、节省电力)及先进的控制技术而迈进。
EPSON满足可扩展性及其他各种需求系统构成S C A R A机械手E2C , j•臂长250/350mm■标准/防尘型•多置式*可搬重量额定1kg/最大3kg E2L•臂长650/850mm•标准/防尘型•可搬重量额定2kg/最大5kg E2S* 臂长450/550/650mm*标准/防尘型•多置式•可搬重量额定2kg/最大5kgE2H•臂长850mm*标准/防尘型•可搬重量额定2kg/最大20kg模块式机械手EZ模块•多变的行程变化•单轴〜4轴规格•可搬重量80kg〜2kg•X轴:400-1000mm300~750mm200-400mm±360°Y轴:Z轴:U轴:6轴机械手ProSix•臂长791 m m•可搬重量3kg机械手控制器m t f z w.wRC420*压缩了R C520功能的—体型单箱控制器fi i i l1■:|_-RC520•具备丰富的选项规格和超强扩展性的工作单元控制器I N D E X索引S C A R A机械手E2C.03E2S«07E2L• 11E2H*13EZ模块EZ模块构成叫5单轴.162轴.173轴 *194轴.20ProSix «21程序开发软件EPSON RC+ *23S P E LC T*23机械手控制器RC420 •24RC520-25程序开发软件选项EPSON RC+I扩展I/OVisionGuide跟踪传输PG动作系统OP500RCVBGuide许可证安全许可证1SPEL CTI扩展丨/0脉冲输出基板'远程I/O'OP5001独立选择'用户操作调谐选择Vision Guide *27跟踪传输*28操作附件«28多任务机械手语言*29产品互联网信息http://fa.epson.co.jp爱普生引以为荣的超精密技术为核心的机械手。
爱普生工业机器人EPSON C4系列机械手机械原点校准

深圳市长荣科机电设械原点位置 二.编码器脉冲复位
三.左右手精确校准
2
一、LS系列机械原点调整
1.1 原点位置
3
一、LS系列机械原点调整
1.2 原点校准密钥
4
二、原点校准
2.1 调整各关节位置,使各关节的U型槽对准,保证原点校准秘钥可以在1.1所 示的各轴U型槽里自由移动,机械手原点姿势如下图所示
6
结束
谢谢
7
2.3 先在“工具” “控制器” “重置控制器”。 等待控 制器重置完成后打开命令窗口,输入CalPls 0,0,0,0,0,0(注意复位编码器 脉冲后不要移动机械手,保持机械手在原点位置)。然后执行以下指令 calib 1,2,3,4,5,6
2.4 移动机械手各关节位置,然后在命令窗口执行 pulse 0,0,0,0,0,0 让机械手回零 脉冲位置,看机械手是否回到原点位置,如果回到原点位置说明原点校准成功。
5
二、原点校准
2.2 打开EPSON软件,连接控制器,先在“工具” “机器人管理器” “控制面板”里将 Motor Off。然后在“工具” “命 令窗口”或单击工具图标“ ”进入命令输入状态。然后在命令窗口 依次输入以下指令,复位编码器脉冲值,输完后敲一下回车键。 EncReset 1,2,3,4,5,6
爱普生机械手全面标准解决方案
其他-爱普生机器人主要参数
其他-爱普生机器人控制器主要参数
谢谢
571286.8 685040
71286.8
650,000 600,000 550,000 500,000
人工
机器人
2年节省17%
1,500,000 1,000,000
500,000 -
人工
机器人
4年节省53%
项目实施进度(计划)
1. 机器人搬运系统工作状态测试(已完成) 2. 开箱机工作状态测试(视频资料)(待确认) 3. 成型机(分组机构)的工作状态测试(待确认) 4. 人机界面的调节内容确认(试用时在线调试) 5. 总体方案的确认和讨论 6. 正式制造合同确认(依据试用情况决定) 7. 安排进场调试(时间在制造合同中约定)
项目可行性分析-国内食品制造业发展趋势
中中国国制制造造 中中国国创创造造
产产品品质质量量提提升升 ((食食品品安安全全)) 人人工工成成本本上上升升
产产业业升升级级后后与与国国内内 外外同同行行的的竞竞争争
企企业业形形象象需需要要提提升升 ((国国际际化化))
先先进进而而安安全全的的 制制造造技技术术 ((无无人人化化))
机器人
CNC 上下料
铆钉供料器
机械手
电脑机箱
铆钉拉栓工作站
机械手
太阳能板
太阳能硅片搬运
第15页
标准化解决方案简述
机械手
机械手
快餐盒 传送带
快餐盒自动搬运装箱
机械手
i-phone 4 部件
i-phone4 组装
涂胶枪
涂胶
汽车零部件
PCB 基板
机械手 规划工作站
PCB-A 插件
爱普生工业机器人EPSON LS系列机械手机械原点校准

5
一、LS系列机械原点调整
1.4 第三轴原点位置(如果已经移动上限位的限位圈或上限位圈被取下时时按 下图所示以第三轴末端与与第一臂底座距离调整第三轴位置。注意:移动第 三轴时可用点动移动,如果不能点动,则将三轴伺服释放然后按住第二轴上 的白色按钮移动Z轴到原点位置)
EPSON LS系列机械原点校准
深圳市长荣科机电设备有限公司
1
内容
一.机械原点位置 二.编码器脉冲复位
三.左右手精确校准
2
一、LS系列机械原点调整
1.1 原点位置
3
一、LS系列机械原点调整
1.2 第一轴原点位置
将键槽与底 座螺丝中心 对齐
1.3 第二轴原点位置
将此键与第 一轴上的小 槽对齐
4
一、LS系列机械原点调整
Hofs Hofs (1), Hofs (2) + (Ppls(P1,2) + Ppls(P2,2)) /2, Hofs(3), Hofs(4)
11
结束
谢谢
12
3.1 准备一个带针尖的夹具装到丝杆上,使针尖与丝杆中心同心,并在工作面 上画一个小十字叉,如下图所示: (对于有高精度矩阵或跟视觉配合做 高精度定位时,如果原点丢失进行校准时必须先按照第二章所叙做初略校准, 然后再进行左右手精确校准)
10
三左右手精确校准
3.2 移动机械手用左手姿势对正工作面上的十字叉,并将该点示教到P1点,然 后切换到右手姿势对正对正工作面上的十字叉,并将该点示教到P2点。然 后在“命令窗口”执行如下指令:
爱普生机器人控制软件EPSON RC+ 5.4.3 SP1版本发布说明说明书
EPSON RC+ 5.4.3 SP1 Release NotesFebruary 1, 2012Thank you for using EPSON RC+ 5.4.3. This document contains the latest information for this release. Please read before using this software.DOCUMENTATION (2)GETTING STARTED (2)INSTALLING SERVICE PACK 1 (2)H OW TO VERIFY IF S ERVICE P ACK 1 IS INSTALLED (2)H OW TO INSTALL S ERVICE P ACK 1 (2)H OW TO UNINSTALL S ERVICE P ACK 1 (2)WHAT’S FIXED IN VERS ION 5.4.3 SP1 (2)WHAT’S NEW IN VERSI ON 5.4.3 (3)WHAT’S FIXED IN VERS ION 5.4.3 (3)SIMULATOR (4)C OLLISION MARGIN FOR ROBOT HAND CANNOT BE SET (4)R OBOT MOTION TIME MAY APPEAR TO BE INCORRECT (4)VB GUIDE 5.0 (4)U SING WITH V ISUAL S TUDIO 2010 AND .NET F RAMEWORK 4.0 (4)C REATING 32 BIT APPLICATION ON 64 BIT W INDOWS (5)E XECUTING S PEL COMMANDS WITHIN A BUTTON CLICK EVENT (5)E XECUTING S PEL MOTION COMMANDS IN A SEPARATE THREAD (5)VISION GUIDE 5.0 (6)I MAGE F ILE P ROPERTY (6)U SING ONE CAMERA FROM TWO CONTROLLERS (6)O FFLINE M ODE (6)I MPORTING FROM EPSON RC+3.X AND 4.X WITH V ISION G UIDE (7)C AMERA CONNECTED TO ANOTHER PC WARNING MESSAGE (7)DocumentationAll RC+ manuals are in PDF format and are installed on the PC hard disk. These manuals are accessible from the RC+ environment Help menu.Getting StartedRead the Getting Started chapter in the EPSON RC+ 5.0 User's Guide. This chapter will refer you to the RC170/RC180 or RC90 Controller manual Installation chapter. This contains information for initial connections and start up.Installing Service Pack 1EPSON RC+ 5.0 Ver.5.4.3 Service Pack 1 is included on the current Ver.5.4.3 installation DVD. It is not automatically installed with the Ver.5.4.3 installation program. It must be installed separately. If your system was configured at the factory, the service pack will already be installed.How to verify if Service Pack 1 is installed1.Run EPSON RC+ 5.0.2.Select Help | About.3.If the service pack is installed, the version number will be 5.4.3 SP1.How to install Service Pack 1To install Service Pack 1:1.Navigate to the \EpsonRC50\Service_Packs directory on the installation DVD.2.Run the file erc543sp1.exe and follow the on screen instructions.How to uninstall Service Pack 1To uninstall Service Pack 1:1.Open Add / Remove Programs in the Windows Control Panel.2.Select EPSON RC+ 5.0 and run it to uninstall.3.Run the EPSON RC+ 5.0 Ver.5.4.3 installer from the installation DVD to re-install it.What’s Fixed in version 5.4.3 SP11.Fixed problem for large Geometric models when connected to the controllervia USB. Communication timeout errors were occurring during someoperations, such as ShowModel.2.Fixed problems for Test Auto Mode and I/O Monitor. If I/O Monitor wasopen before executing Test Auto Mode, the Operator Window was closedimmediately after being displayed. Or if the I/O Monitor was opened fromthe Operator Window and not closed before closing the Operator Window, thenan exception occurred.3.Fixed problem for virtual controllers where any G3 series robot could not beadded.4.Fixed Startup preferences when running on 64 bit Windows. The Auto Startand Windows Login settings were not working.5.Fixed problem for GSet. If an integer was expected, but a real or double wasused, an exception occurred.6.Fixed some simulator drawing processing problems for 2D Layout and 3Dviews.7.Fixed problems for Japanese help.8.Fixed the error message when attempting connection with a controller that isnot finished booting. Previously, a "USB Driver not installed" error wasoccurring.What’s New in version 5.4.31.Added GUI Builder option.2.Added USB driver for 64 bit Windows Vista and Windows 7.3.Added support for Remote RS232.4.VB Guide5.0 now supports 64 bit applications.What’s Fixed in version 5.4.31.Fixed a problem for some project dialogs (new, open, copy, save as, import).An exception occurred when the dialog was opened if one or more drivevolume labels on the system could not be read (access denied).2.Fixed a problem where sometimes don't care pixels were not being saved.3.Added VB Guide 5.0 Spel EnableEvent method.4.Fixed a problem where vision files were being sent to the controller duringevery project build.5.Now the Camera dropdown list is not displayed on the Operator window ifvideo display is disabled and EPSON RC+ is connected to a real controller.6.Fixed a problem where sometimes edges for Geometric objects were not beingdisplayed on the Operator window or Run window.SimulatorCollision margin for robot hand cannot be setYou cannot set the Collision Margin for robot hand in this version.Robot motion time may appear to be incorrectOn some PCs, when you run a program that moves the robot, the speed may seem incorrect. There are settings you can change to help correct the problem. Select Setup | Controller | Simulator and increase the Performance setting to 16 and the Position Precision to 20. You may need to experiment with other values.See Simulator Specifications and Restrictions, Time progress difference by PC condition in the manual or help for more details.VB Guide 5.0Using with Visual Studio 2010 and .NET Framework 4.0If you create an application using Visual Studio 2010 and the target framework version is 4.0, then you need modify the project to allow SpelNetLib.dll to be used. SpelNetLib.dll was created with .NET Framework 3.5. By default, applications that target .NET Framework 4.0 cannot load assemblies from previous .NET Framework versions. You must add and modify the app.config file for the solution and set the useLegacyV2RuntimeActivationPolicy property.For VB and C#:1.In Solution Explorer, check if app.config exists. If it does, go to step 4.2.From the Project menu, select Add New Item.3.Select Application Configuration File and click Add. The app.config XML filewill appear.4.In the app.config file, add the following XML code inside the configurationproperty.<configuration><startup useLegacyV2RuntimeActivationPolicy="true"><supportedRuntime version="v4.0"/></startup></configuration>For VC++:1.Create a config file for the application that uses the same name as the exe file with".config" appended. For example, if you exe file name is myapp.exe, then theconfig file would be named myapp.exe.config.2.In the config file, add the configuration code:<configuration><startup useLegacyV2RuntimeActivationPolicy="true"><supportedRuntime version="v4.0"/></startup></configuration>3.Copy the config file to both the debug and release folders. You can use a postbuild event that performs this automatically. For an example, see the VB Guide5.0 VC++ demo project.Creating 32 bit application on 64 bit WindowsTo successfully create a VB Guide 5.0 32 bit application on 64 bit Windows, you must set the Visual Studio build target to x86 (32 bit). When using Visual Studio Express versions, you will need to first create the x86 target after enabling Expert Mode. Executing Spel commands within a button click eventIn .NET, if you execute a method in a button click event, you cannot click another button to execute another method on the first click. For example, if you execute the Go method in a button click event, and attempt to click another button to execute the Abort method, the second button will not respond the first time. This is true even if VB Guide is not used. Instead, use the button MouseDown event to execute the Go method, or execute Spel commands in a separate thread as described in the following topic.Executing Spel motion commands in a separate threadIf you will be executing Spel motion commands from your .NET application, it is recommended that you execute them in a separate thread. This will allow other methods such as Abort to be executed from other buttons. The example below shows a separate thread for Spel motion commands.private void btnStartCycle_Click(object sender, EventArgs e){btnStartCycle.Enabled = false;btnStopCycle.Enabled = true;m_stop = false;m_spel.ResetAbort();// Start the robot cycleSystem.Threading.Thread t = new System.Threading.Thread(RobotCycle); t.Start();}private void btnStopCycle_Click(object sender, EventArgs e){m_stop = true;m_spel.Abort(); // Optional. This will immediately stop the cyclebtnStopCycle.Enabled = false;btnStartCycle.Enabled = true;}private void RobotCycle(){try{do{m_spel.Jump("pick");m_spel.On("GripOn");m_spel.Delay(100);m_spel.Jump("place");m_spel.Off("GripOn");m_spel.Delay(100);} while (!m_stop);}catch (SpelException e){// If the error is not "Command aborted by user",// then show the error messageif (e.ErrorNumber != 10101)MessageBox.Show("Spel error occurred¥n¥n" + e.Message);}}Vision Guide 5.0ImageFile PropertyThe EPSON Smart Camera supports one image file stored in each camera project. When an ImageFile is specified for a sequence, it is copied to the camera when the sequence is selected from the Vision Guide GUI.You can use the SaveImage property to save an unlimited number of images on the PC.Using one camera from two controllersThe EPSON Smart Camera supports two vision projects. Each vision project can be used by one controller, so two controllers can use the same camera. Project 1 is used by default. To use project 2, change the camera project number from RC+ Project | Properties | Vision.Offline ModeWhen you open the Vision Guide window, RC+ attempts to communicate with the Smart Cameras configured in Setup | Vision. If communication cannot be initiated, a message box is displayed stating that one or more Smart Cameras cannot be connected and asking if you would like to open Vision Guide in offline mode. Answer Yes to enter Offline Mode. In Offline Mode, you can edit Sequences, Objects, and Calibrations. To enter Online Mode, close the Vision Guide window, then open it again.Importing from EPSON RC+ 3.x and 4.x with Vision GuideYou can import projects that were created in EPSON RC+ 3.x and 4.x that used the Vision Guide option.To import a project:4.In EPSON RC+5.0, select Project | Import.5.Select PC and click Next.6.Select EPSON RC+ 3.x / 4.x for the Project Type.7.Select the drive and project to import and continue with the wizard.Please review the following information regarding imported EPSON RC+ 4.x projects: - Vision calibrations are imported, but the associated calibration data is not imported. You will need to run your calibrations after import.- the RobotU vision result is changed. In EPSON RC+ 4.x, RobotU was reported with 0 degrees aligned with the robot world Y axis. Now RobotU is reported with 0 degrees aligned with the robot world X axis.- Maximum NumberToFind is changed. In Vision Guide 5.0, the maximum NumberToFind for any multi-result object is 100. During import, NumberToFind is reduced to 100 if necessary.- Calibration properties cannot be set at runtime.- VCalPoints and VCal are not supported. Vision calibrations cannot be executed at runtime.- Vision model properties cannot be set at runtime.- VTeach is not supported. Vision models cannot be taught at runtime.- OCR and Code Reader objects are currently not supported in Vision Guide 5.0.During import, OCR objects are converted to Correlation objects, and Code Reader objects are converted to Blob objects.Camera connected to another PC warning messageNormally, if one PC tries to connect to a Smart Camera that is already connected to another PC or controller, you will see a message box stating this.However, sometimes if the Ethernet cable is disconnected or if the RC+ process is terminated while connected to a Smart Camera, then on the next connection attempt, you may receive the message described above. In this case, reset the camera from Setup |Vision, or power cycle the camera. Then rebuild the current project using Project | Rebuild. Smart Camera firmware v1.0.0.4 reduces the occurrence of this problem.。
EPSON机器人通讯连接

深圳市长荣科机电设备有 通过USB连接控制器 1.2 通过以太网连接控制器
2
内容
3.11 编写一个RS232串口通讯程序(含串口设置, 数据分解赋值)
3.12 编写一个以太网通讯程序(含以太网设置,数 据分解赋值)
3
超时设为0,表示不 设置超时
设置与上位机保 持一致
10
3、程序操作
3)以太网通讯程序
11
3、程序操作
12
结束
谢谢
13
6
3、程序操作
3.11 编写一个RS232串口通讯程序(参看程序RS232_demo) 1)串口设置 单击“设置”,选择“系统配置”打开控制器设置画面。单击“RS232”,
选择“端口1”进下图所示串口设置画面,串口通讯参数设置与上位机保持一 致,设置好后单击“应用”,然后关闭设置画面
设置串口参数,与 上位机保持一致
7
3、程序操作
8
3、程序操作
3.12 编写一个以太网通讯程序(参看程序internet_demo) 1)控制器IP设置 单击“设置”,选择“系统配置”打开控制器设置画面。单击“配置”,
进入下图所示以太网设置画面,IP地址前3位与上位机保持一致,最后一位与 上位机不同。设置好后单击“应用”,然后关闭设置画面
设置控制器IP地址,IP地址前3位 与上位机保持一致,最后一位与 上位机不同。例如上位机IP为
192.168.1.1 控制器IP设为192.168.1.10
9
3、程序操作
2)以太网端口设置 单击“设置”,选择“系统配置”打开控制器设置画面。单击“TCP/IP”,
选择一个端口号,进入下图所示以太网端口设置画面,IP地址、端口,结束符 设置与上位机保持一致。设置好后单击“应用”,然后关闭设置画面
Epson RC700-A 机器人控制器操作手册说明书
Controlador de robot Unidad de control RC700RC700-AUnidad de mando RC700DURC700DU-ASoftware de programación EPSON RC+7.0Manipulador Serie G1 G3 G6 G10 G20Serie RSSerie C4, C8, C12Serie N2, N6Serie X5CPD-60430Sistema de robot Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24Sistema de robot Seguridad e instalación(RC700 / EPSON RC+7.0)Mod. 24Copyright 2012-2020 SEIKO EPSON CORPORATION. Todos los derechos reservados. Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24iPRÓLOGOGracias por comprar nuestros productos de robot.Este manual contiene la información necesaria para el uso correcto del sistema derobot.Lea atentamente este manual y otros manuales relacionados antes de instalar elsistema de robot.Mantenga este manual a la mano para un acceso fácil en todo momento. GARANTÍAEl sistema de robot y las piezas opcionales se envían a nuestros clientes solo despuésde haberlos sometido a los más estrictos controles, pruebas e inspecciones de calidadpara certificar que cumplen con nuestras altas normas de rendimiento.Los productos que tengan un mal funcionamiento como resultado de lamanipulación u operación normales se repararán en forma gratuita durante elperíodo normal de la garantía. (Comuníquese con el proveedor de su región paraobtener información sobre el período de garantía).Sin embargo, se cobrarán al cliente las reparaciones en los siguientes casos (aunquesucedan dentro del período de garantía):1.Daño o mal funcionamiento provocados por un uso inadecuado que no sedescribe en este manual o por uso descuidado.2.Mal funcionamiento provocado por el desmontaje no autorizado delproducto por parte de los clientes.3.Daños debido a ajustes inadecuados o a intentos de reparación noautorizados.4.Daño provocado por desastres naturales, como terremotos, inundaciones,etc.Advertencias, precauciones, uso:1.Si el equipo asociado al sistema de robot no se usa de acuerdo con lascondiciones de uso y las especificaciones del producto descritas en losmanuales, esta garantía queda nula.2.Si no sigue las ADVERTENCIAS y PRECAUCIONES de este manual, nopodemos hacernos responsables de ningún mal funcionamiento o accidente,incluso si tienen como resultado lesiones o la muerte.3.No podemos prever todos los posibles peligros y consecuencias. Por lotanto, este manual no puede advertir al usuario de todos los posiblespeligros.ii Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24MARCAS COMERCIALESMicrosoft, Windows y el logotipo de Windows son marcas registradas o marcascomerciales de Microsoft Corporation en los Estados Unidos y otros países. Otrasmarcas y nombres de productos son marcas comerciales o marcas registradas de susrespectivos titulares.NOTACIÓN DE MARCAS COMERCIALES EN ESTE MANUAL Sistema operativo Microsoft® Windows® 8Sistema operativo Microsoft® Windows® 10En todo este manual, Windows 8 y Windows 10 se refieren a los respectivos sistemasoperativos ya citados. En algunos casos, Windows se refiere en forma genérica aWindows 8 y Windows 10.AVISONinguna parte de este manual se puede copiar o reproducir sin autorización.El contenido de este manual está sujeto a cambios sin previo aviso.Notifíquenos si encuentra errores en este manual o si tiene comentarios con respectoa su contenido.FABRICANTESeiko Epson Corporation3-3-5 Owa, Suwa-shi, Nagano, 392-8502URL:/company/: http://www.epson.jp/prod/robots/Toyoshina PlantRobotics Solutions Operations Division6925 Toyoshina Tazawa,Azumino-shi, Nagano, 399-8285JapónTEL.: +81-(0)263-72-1530FAX: +81-(0)263-72-1685Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24iiiPROVEEDORES (País/Región)América del Nortey del Sur Epson America, Inc.Factory Automation/Robotics18300 Central AvenueCarson, CA 90746EE.UU.TEL.: +1-562-290-5910 FAX: +1-562-290-5999 CORREOELECTRÓNICO:*****************.comEuropa Epson Deutschland GmbHRobotic SolutionsOtto-Hahn-Str.4D-40670 MeerbuschAlemaniaTEL.: +49-(0)-2159-538-1800FAX: +49-(0)-2159-538-3170CORREOELECTRÓNICO:****************URL:: www.epson.de/robotsChina Epson (China) Co., Ltd.Factory Automation Division4F, Tower 1, China Central Place,81 Jianguo Road, Chaoyang District,Beijing, 100025, PRCTEL.: +86-(0)-10-8522-1199FAX: +86-(0)-10-8522-1125Taiwán Epson Taiwan Technology & Trading Ltd.Factory Automation Division15F., No.100, Song Ren Road., Xinyi Dist., Taipei City, 11073TaiwánTEL.: +886-(0)-2-8786-6688FAX: +886-(0)-2-8786-6600iv Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24Corea Epson Korea Co., Ltd.Marketing Team (Robot Business)10F Posco Tower, Teheranro 134(Yeoksam-dong)Gangnam-gu, Seoul, 06235CoreaTEL.: +82-(0)-2-3420-6632FAX: +82-(0)-2-558-4271Sudeste Asiático Epson Singapore Pte. Ltd.Factory Automation System1 HarbourFront Place, #03-02,HarbourFront Tower One,Singapur 098633TEL.: +65-(0)-6586-5500FAX: +65-(0)-6271-2703India Epson India Pvt. Ltd.Sales & Marketing (Factory Automation)12th Floor, The Millenia, Tower A, No. 1,Murphy Road, Ulsoor, Bangalore,India 560008TEL.: +91-80-4566-5000FAX: +91-80-4566-5005Japón Epson Sales Japan CorporationFactory Automation Systems Department29th floor, JR Shinjuku Miraina Tower, 4-1-6Shinjuku, Shinjuku-ku, Tokyo 160-8801JapónTEL.:+81-(0)3-5919-5257FAX:+81-(0)3-5919-5402Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24vEn relación con la eliminación de la bateríaLa etiqueta con el basurero con ruedas tachado que se puede encontrar en el producto indica que este producto y las baterías incorporadas no se deben eliminar en el flujo normal de desechos domésticos. Para evitar los posibles daños ambientales o a la salud humana, separe este producto y las baterías de otros flujos de desechos para garantizar que se puedan reciclar de una manera ambientalmente correcta. Para conocer más detalles acerca de las instalaciones de recolección, comuníquese con la oficina gubernamental local o con el vendedor minorista donde compró este producto. El uso de los símbolos químicos Pb, Cd o Hg indica si estos metales se usan en la batería.Esta información solo se aplica a los clientes de la Unión Europea, de acuerdo con la DIRECTIVA 2006/66/CE DEL PARLAMENTO EUROPEO Y DEL CONSEJO DEL 6 de septiembre de 2006 acerca de las baterías y acumuladores y de las baterías y acumuladores de desecho y por la que se deroga la Directiva 91/157/CEE y la legislación, la cual se transpone e implementa en diversos sistemas legales nacionales.Para otros países, comuníquese con su gobierno local para investigar la posibilidad de reciclar su producto.El procedimiento de retiro y reemplazo de la batería se describe en los siguientes manuales: Manual del controlador / Manual del manipulador(sección Mantenimiento)Solo para clientes de CaliforniaLas baterías de litio de este producto contienenMaterial de perclorato: Se pueden aplicar procedimientos de manipulación especiales. Consulte la página /hazardouswaste/perchlorate (solo disponible en inglés.vi Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24viiAntes de leer este manualCon respecto a la compatibilidad de seguridad para la conexión de red:La función de conexión de red (Ethernet) de nuestros productos supone el uso en la red local, como la red LAN de la fábrica. No la conecte a la red externa, como Internet.Además, tome medidas de seguridad, como contra virus de la conexión de red, mediante la instalación de un software antivirus.Compatibilidad de seguridad para la memoria USB: Asegúrese de que la memoria USB no esté infectada con virus cuando se conecte al controlador.Configuración de sistema de controlLa unidad de mando RC700DU del controlador de robot está disponible para la siguiente versión.EPSON RC+ 7.0 Ver. 7.1.0 o posteriorControlador de robot RC700-ALa unidad de mando RC700DU-A del controlador de robot está disponible para la siguiente versión.EPSON RC+ 7.0 Ver. 7.1.2 o posteriorLos manipuladores se pueden conectar con las siguientes versiones. Serie C4 : EPSON RC+ 7.0 Ver.7.0.0 Serie C8 (C8XL) : EPSON RC+ 7.0 Ver.7.1.3 Serie C8(C8, C8L) : EPSON RC+7.0 Ver.7.1.4Serie C8 (montaje en pared) : EPSON RC+ 7.0 Ver.7.2.0 Serie C12 : EPSON RC+ 7.0 Ver.7.4.6 Serie N2: EPSON RC+ 7.0 Ver.7.2.0 Serie N6 (N6-A1000**) : EPSON RC+ 7.0 Ver.7.3.4 Serie N6 (N6-A850**R) : EPSON RC+ 7.0 Ver.7.4.1Serie G1, G3, G6, G10, G20, RS : EPSON RC+ 7.0 Ver.7.1.2 Serie X5: EPSON RC+ 7.0 Ver.7.3.0☞NOTA☞NOTARoHS de ChinaEsta hoja y etiqueta de período de uso de protección ambiental se basan enel reglamento de China. No es necesario preocuparse por esto en otros países. viii Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24产品环保使用期限的使用条件关于适用于在中华人民共和国境内销售的本产品的环保使用期限,在遵守该产品的安全及使用注意事项的条件下,从生产日期开始计算,在标志的年限内,本产品中含有的有害物质不会对环境造成严重污染或对人身、财产造成严重损害。
爱普生培训_软件部分

江苏力德尔电子信息技术有限公司
LOGO 7
2.1 新建项目
ห้องสมุดไป่ตู้
LOGO
1. 新建项目步骤如图所示。 2. 项目文件夹的路径为C或D:\EpsonRC70\projects\
江苏力德尔电子信息技术有限公司 8
2.2 项目的导入和导出
LOGO
• 导入:将控制器中的项目文件导入到电脑的 projects文件夹。
LOGO
如图,在安装完润滑剂/电池后,进入控制器报警 页面,选中红色报警栏目,点击改变按钮,填入安装润 滑剂/电池时间后点击确定按钮。
江苏力德尔电子信息技术有限公司 27
当安全门打开时,若机械手位置发生变更,安全门关闭后,机械手能自 动恢复到之前位置。 5. 独立模式
使用远程IO控制时需勾选此选项。 5. 当MainXX函数启动时清除全局
机械手主任务运行开始时,自动清除全局变量中的数据。 6. 启用后台任务 江苏力德尔电子信息技术有限公司
5
1.3 控制器参数的备份与恢复
新项目文件写入到控制器中。
江苏力德尔电子信息技术有限公司 10
三、调试
3.1 命令窗口 3.2 IO标签编辑器和IO监视器 3.3 任务管理器 3.4 机器人管理器
江苏力德尔电子信息技术有限公司
LOGO 11
3.1 命令窗口
可以手动输入并执行SPEL+命令并查看结果。
LOGO
江苏力德尔电子信息技术有限公司 12
江苏力德尔电子信息技术有限公司
LOGO 19
4.2 输入输出相关命令
1. On、Off 打开/关闭输出位,通过I/O 和存储器I/O 来使用。 2. Oport 读取输出位的状态。 3. Sw 读取输出位的状态。 4. Out 输出1 字节(8 位)的输出数据,通过I/O 和存储器I/O 来使用。 5. OutW 输出1 个字(16 位)的输出数据,通过I/O 和存储器I/O 来使用。 6. MemOn/Memoff 是按照位编号打开/关闭指定的存储器I/O 的命令。 7. MemSw 是用于返回指定存储器I/O 位的状态的函数。 8. MemOut 是以字节为单位返回存储器I/O 状态的命令。 9. Wait 按照事件条件进行待机。 10. Input 接收显示装置的输入并保存到变量中。 11. Print 在输出画面、命令画面或操作窗口显示数据。 12. OpenNet/CloseNet 打开/关闭TCP/IP 网络端口。 13. SetNet 设置TCP/IP 端口的参数。 14. ChkNet 返回网络端口的接收缓冲器内的字符数。 15. Read 从文件或通信端口读取指定的字符数。
信赖产生进步——爱普生机械手
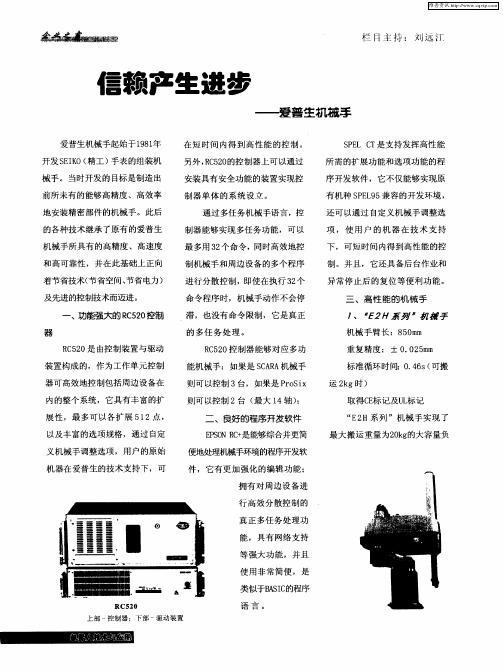
安装 具有安全功能 的装置实现控 制器单 体 的系 统设立 。 通过 多任务机械手语言,控 制器能够实现 多任务功能,可以
最多用 3 个命令 ,同时高效地控 2
序 开发软件 ,它不仅能够实现 原
有机种 S E 9 兼容的开发环境, P L5 还可 以通 过 自定义机械手调整选 项 ,使用 户 的机 器在 技 术 支 持 下 ,可短 时间内得到高性能的控 制。并且 ,它还具备后 台作业和
“ H 系列间的互换性等特 点。 E” 2、P o i r Sx机摄 手 臂长 :7 1 m 9 m 重复精度 :± 0 0 m .3 m 可搬重量:3 g 根据制约条 k ( 件最高 可达 到 5 g k)
为 l g时 ) k 取得C 标记及U 标记 E L P o i 利用新开发 的6 专 rSx 轴 用 智能动作 控制器 完善 “ 高速 、
高精度 定位 ” 、“ 密 轨 迹 控 精
制”的基本功能 ,具有高速、高
精度定位 ;高精度的轨迹控制 ;
应对大容量负载;保持兼容性动 作命 令 的扩 展等特 点 。
洛 阳维 斯 格轴 承 有 限 公司 ,座 落 于 美丽 的洛 河 之滨 洛 阳高 新技 术 开发 区 内 ,公 司集 科 工 贸为一 体 ,汇 集 了一 批享 誉 国 内轴承 行 业 的知 名技 术 和 管理 专才 。公司 不仅 能够 设 计 制 造 高 精度 、高 可 靠 性 和 长 寿 命 的 轴 承 , 服 务 于 各 行 各 业 ,还 可 以按 照 顾 客 的要 求 , 设计 、开发和 生 产各 种特 种 非标 轴 承 。公 司 注册商标 为 W S X 嘧 等 截 面 薄 壁 轴 承 、谐 波 减 速 器 柔 性 轴 承 、十 字交 叉 圆柱 滚 子轴 承是 公 司 自主 开发 的特 色 产 品 。它 已经通 过 河南 省 科技 厅 组织 的科 学技 术成 果鉴 定 。经 国家轴 承质 检 中心 检 测和 用 户使 用证 明 ,与 国外 同类 产 品水平 相 当 ,处 于 国 内领 先 水 平 。 等 截 面 薄 壁 轴 承 、 谐 波 减 速 器 柔 性 轴
爱普生机械手控制器
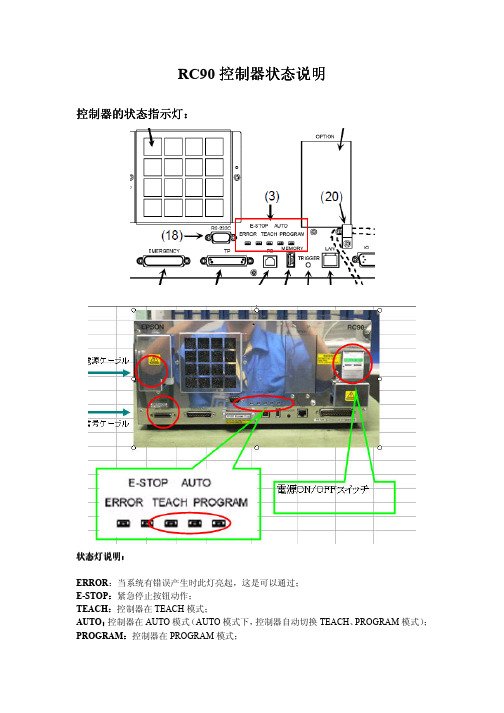
RC90控制器状态控制器状态说明说明控制器的状态指示灯控制器的状态指示灯::状态灯说明状态灯说明::ERROR :当系统有错误产生时此灯亮起,这是可以通过; E-STOP :紧急停止按钮动作; TEACH :控制器在TEACH 模式; AUTO :控制器在AUTO 模式(AUTO 模式下,控制器自动切换TEACH 、PROGRAM 模式); PROGRAM :控制器在PROGRAM 模式;ERROR 灯点亮时灯点亮时的处理步骤的处理步骤的处理步骤::1. 当ERROR 点亮时,系统停止程序运行;此时通过控制器的“RESET ”功能复位控制器,如果复位成功,ERROR 灯变灭;通过此操作,如果ERROR 状态没有解除,则断开控制器总电源后重新上电,如果ERROR 状态没有解除进行下一步操作。
2. 准备一台装有RC+软件的电脑、USB 线或网线,连接到控制器,通过RC+查看控制器的状态,方法有:Ⅰ. 在软件“菜单栏”->查看->系统历史记录,可以看到所有的报警记录,如下图:Ⅱ. a.在软件“菜单栏”->工具->控制器,先通过“导出控制器状态”按钮导出控制器状态文件,导出控制器状态文件的方法有两个;方法一:方法二:一键USB备份控制器的状态:①. 插入U盘到Memory口,10秒以上;②. 按下“Tirgger”按钮,这时控制器上面的ATUO、PROGRAME、TAECH状态等会同时闪烁;③. 等待ATUO、PROGRAME、TAECH状态灯恢复正常状态,控制器状态文件保存完成。
④. 保存的文件命名为规则为:“S“+控制器序列号+保存时的日期、时间例如:S_12345_20060524105744b. 再点击“观看控制器状态”打开上一步操作导出的状态文件,点击“确定”按钮:c.在“控制器状态观看器”下,打开“系统历史”,如下图:3. 在“编号”栏找到主要的错误代码,“信息”栏有关于错误原因的描述;参考《RC90控制器手册.pdf》有关于错误信息的详细描述和应对错误建议操作。
Epson ECP爱普生机械手外部控制点详解(个人总结)
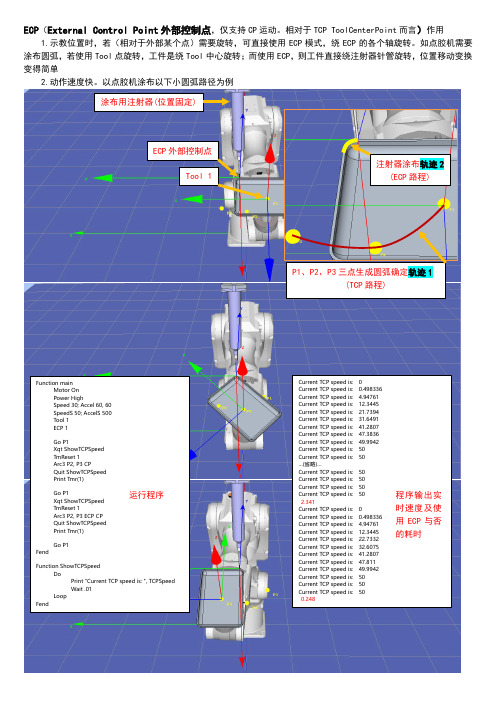
ECP(External Control Point外部控制点,仅支持CP运动。
相对于TCP ToolCenterPoint而言)作用1.示教位置时,若(相对于外部某个点)需要旋转,可直接使用ECP模式,绕ECP的各个轴旋转。
如点胶机需要涂布圆弧,若使用Tool点旋转,工件是绕Tool中心旋转;而使用ECP,则工件直接绕注射器针管旋转,位置移动变换变得简单2.动作速度快。
以点胶机涂布以下小圆弧路径为例ECP外部控制点Tool 1 注射器涂布轨迹2 (ECP路程)涂布用注射器(位置固定)P1、P2、P3三点生成圆弧确定轨迹1(TCP路程)Function mainMotor OnPower HighSpeed 30; Accel 60, 60SpeedS 50; AccelS 500Tool 1ECP 1Go P1Xqt ShowTCPSpeedTmReset 1Arc3 P2, P3 CPQuit ShowTCPSpeedPrint Tmr(1)Go P1Xqt ShowTCPSpeedTmReset 1Arc3 P2, P3 ECP CPQuit ShowTCPSpeedPrint Tmr(1)Go P1FendFunction ShowTCPSpeedDoPrint "Current TCP speed is: ", TCPSpeedWait .01LoopFend Current TCP speed is: 0 Current TCP speed is: 0.498336 Current TCP speed is: 4.94761 Current TCP speed is: 12.3445 Current TCP speed is: 21.7394 Current TCP speed is: 31.6491 Current TCP speed is: 41.2807 Current TCP speed is: 47.3836 Current TCP speed is: 49.9942 Current TCP speed is: 50 Current TCP speed is: 50 …(省略)…Current TCP speed is: 50 Current TCP speed is: 50 Current TCP speed is: 50 Current TCP speed is: 502.341Current TCP speed is: 0 Current TCP speed is: 0.498336 Current TCP speed is: 4.94761 Current TCP speed is: 12.3445 Current TCP speed is: 22.7332 Current TCP speed is: 32.6075 Current TCP speed is: 41.2807 Current TCP speed is: 47.811 Current TCP speed is: 49.9942 Current TCP speed is: 50 Current TCP speed is: 50 Current TCP speed is: 500.248运行程序程序输出实时速度及使用ECP与否的耗时P1、P2、P3三点生成圆弧。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RC90控制器状态控制器状态说明说明
控制器的状态指示灯控制器的状态指示灯::
状态灯说明状态灯说明::
ERROR :当系统有错误产生时此灯亮起,这是可以通过; E-STOP :紧急停止按钮动作; TEACH :控制器在TEACH 模式; AUTO :控制器在AUTO 模式(AUTO 模式下,控制器自动切换TEACH 、PROGRAM 模式); PROGRAM :控制器在PROGRAM 模式;
ERROR 灯点亮时灯点亮时的处理步骤的处理步骤的处理步骤::
1. 当ERROR 点亮时,系统停止程序运行;此时通过控制器的“RESET ”功能复
位控制器,如果复位成功,ERROR 灯变灭;通过此操作,如果ERROR 状态没有解除,则断开控制器总电源后重新上电,如果ERROR 状态没有解除进行下一步操作。
2. 准备一台装有RC+软件的电脑、USB 线或网线,连接到控制器,通过RC+查
看控制器的状态,方法有:
Ⅰ. 在软件“菜单栏”->查看->系统历史记录,可以看到所有的报警记录,如下图:
Ⅱ. a.在软件“菜单栏”->工具->控制器,先通过“导出控制器状态”按钮导出控制器状态文件,导出控制器状态文件的方法有两个;
方法一:
方法二:
一键USB备份控制器的状态:
①. 插入U盘到Memory口,10秒以上;
②. 按下“Tirgger”按钮,这时控制器上面的ATUO、PROGRAME、TAECH
状态等会同时闪烁;
③. 等待ATUO、PROGRAME、TAECH状态灯恢复正常状态,控制器状态文
件保存完成。
④. 保存的文件命名为规则为:“S“+控制器序列号+保存时的日期、时间
例如:S_12345_20060524105744
b. 再点击“观看控制器状态”打开上一步操作导出的状态文件,点击“确定”
按钮:
c.在“控制器状态观看器”下,打开“系统历史”,如下图:
3. 在“编号”栏找到主要的错误代码,“信息”栏有关于错误原因的描述;参考《RC90控制器手册.pdf》有关于错误信息的详细描述和应对错误建议操作。
状态文件的说明状态文件的说明::
状态文件包含的内容有:控制器里的程序、点文件、系统历史、输入/输出的状态、控制器里的配置信息(如:序列号、IP 地址、控制设备)、机器人的信息(如:序列号、序列号、HOFS 值)等。
文件名:状态文件以“S “+控制器序列号+保存时的日期、时间;
例如:S_12345_20060524105744 如下图:。