爱普生机械手最新最全资料
2024版EPSON机器人培训教程

使用条件语句(如if-else)、循环语句(如for、while)等逻辑控制结构,实现机器人的复 杂行为控制。同时,注意避免逻辑错误和死循环等问题。
异常处理
在程序中添加异常处理机制,如try-catch语句,用于捕获和处理程序运行时的异常情况,提 高程序的稳定性和可靠性。
数据处理与算法应用
03
EPSON机器人软件编程
Chapter
编程语言与开发环境
编程语言
EPSON机器人主要使用C和Python进 行编程,其中C适用于底层控制和实 时性能要求高的场景,而Python则适 用于快速开发和原型验证。
开发环境
编程规范
遵循良好的编程规范,如命名规范、 注释规范、代码风格等,有助于提高 代码的可读性和可维护性。
推荐使用EPSON提供的官方开发环境, 包括编译器、调试器和仿真器等工具, 支持Windows和Linux操作系统。
程序结构与逻辑控制
程序结构
EPSON机器人的程序结构通常包括初始化、主循环和结束处理等部分,其中初始化部分用于 配置机器人参数和初始化变量,主循环部分用于实现机器人的主要功能,结束处理部分用于 清理资源和关闭程序。
03
机器人运动控制指 令详解
04
调试工具使用及常 见问题排查
高级功能与应用实例
01
02
机器人视觉系统配置与调试
复杂轨迹规划与实现
03
04
多机器人协同作业配置
机器人与外部设备通信
故障诊断与维护保养
常见故障现象与原因分析 机器人日常维护保养项目
故障诊断方法与步骤 预防性维护计划制定与执行
05
EPSON机器人行业应用案例
EPSON机器人应用于智能交通、 智能安防、智能环保等领域,推 动城市智能化发展。
2024版年度爱普生4轴机器人培训课件

CATALOG DATE ANALYSIS SUMMARY 爱普生4轴机器人培训课件目录CONTENTS•机器人技术基础•爱普生4轴机器人概述•机器人编程与操作•传感器与视觉系统应用•安全规范与维护保养•实战演练与考核评估REPORT01机器人技术基础机器人定义与分类机器人定义机器人是一种能够自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,还可以根据人工智能技术制定的原则纲领来行动。
机器人分类根据应用领域不同,机器人可分为工业机器人、服务机器人、特种机器人等。
示教再现型机器人,通过示教盒进行编程,实现点位控制。
第一代工业机器人第二代工业机器人第三代工业机器人带有感觉系统的机器人,如力觉、触觉、视觉等传感器,实现一定程度的自适应。
智能型机器人,具有高度的自适应能力和学习能力,能够自主完成复杂的作业任务。
030201工业机器人发展历程4轴机器人特点及优势特点4轴机器人具有结构紧凑、动作灵活、速度快、重复定位精度高等特点。
优势相比其他类型的工业机器人,4轴机器人在空间占用、运动范围、运动精度等方面具有明显优势,特别适用于对空间要求较高的场合。
应用领域与市场前景应用领域4轴机器人广泛应用于装配、打磨、喷涂、焊接、搬运等工业领域,尤其在汽车、电子、家电等行业得到广泛应用。
市场前景随着智能制造和工业自动化的快速发展,4轴机器人的市场需求不断增长。
未来,随着技术的不断进步和应用领域的不断拓展,4轴机器人的市场前景将更加广阔。
REPORT02爱普生4轴机器人概述爱普生是全球知名的打印设备、信息设备、工业机器人及智能设备制造商凭借其在精密技术领域的专业积累,爱普生不断推出创新产品和解决方案爱普生致力于为客户提供高效、可靠、智能的工业机器人产品和服务爱普生公司简介4轴机器人具有高速、高精度、高稳定性等特点,适用于多种工业自动化场景爱普生提供了多种不同型号和规格的4轴机器人,以满足不同客户的需求爱普生4轴机器人是该公司工业机器人产品线中的重要组成部分4轴机器人产品系列010204技术参数与性能指标爱普生4轴机器人采用先进的运动控制技术和精密传动机构具有出色的重复定位精度和轨迹精度,可实现高精度作业高速度、高加速度性能,可大幅提高生产效率强大的负载能力和工作范围,适应多种复杂作业需求03根据不同的生产需求和应用场景,选择适合的4轴机器人型号和规格考虑机器人的负载能力、工作范围、精度要求等因素进行选型爱普生4轴机器人适用于装配、搬运、码垛、上下料等多种工业自动化场景可与各种自动化设备和生产线进行无缝对接,提高生产效率和降低成本01020304选型指南及适用场景REPORT03机器人编程与操作03编程界面及功能详细讲解编程界面的布局、菜单功能等01爱普生4轴机器人编程语言概述包括指令集、语法规则等02编程环境设置介绍软件安装、配置及调试方法编程语言及环境介绍在线示教编程方法示教器基本操作包括示教器按键、摇杆、触摸屏等操作方式机器人运动控制讲解机器人的移动、旋转、速度控制等程序编写与调试介绍如何在线编写、修改和调试程序离线编程软件介绍机器人模型建立轨迹规划与仿真程序导出与上传离线编程软件使用技巧01020304包括软件功能、安装方法等讲解如何建立与实际机器人相符的模型介绍如何进行轨迹规划、碰撞检测等仿真操作讲解如何将离线编写的程序导出并上传到实际机器人中检查电源、急停按钮等硬件设备是否正常机器人无法启动或停止检查程序编写是否正确、机械结构是否松动等机器人运动轨迹异常检查机器人模型、工具坐标系等设置是否正确离线编程与实际运行不符根据实际使用情况,提供针对性的解决方案其他常见问题及解决方案常见问题分析与解决方案REPORT04传感器与视觉系统应用位置传感器光电传感器力觉传感器其他传感器传感器类型及功能介绍检测机器人各轴位置,确保运动精度和稳定性。
爱普生培训资料:EPSON机械手软件操作指南
四、RC+5.4.3软件操作 (5)在“点数据”页面单击“保存”按钮,完成示教点。
四、RC+5.4.3软件操作
五、 马达重置及伺服OFF
工具 →机器人管理器→控制面板或单击工轴刹车释放后要按住 伺服指示灯旁边白色按
钮才能手动移动Z轴
运行功率设置
四、RC+5.4.3软件操作
1、 示教点步骤
(1)在“点数据”页面中“点文件”下拉菜单中选择需要教点的点文件
单击选择点文件
四、RC+5.4.3软件操作
(3)微动将机械手移动的需要示教点的位置。如果是SCARA机械手,Motor On情况下,可以在 Control Panel 页面Free All释放所有轴后,手动将机械手移动需要示教点的位置后,Lock ALL锁定所有轴。
EPSON机械手软件操作指南
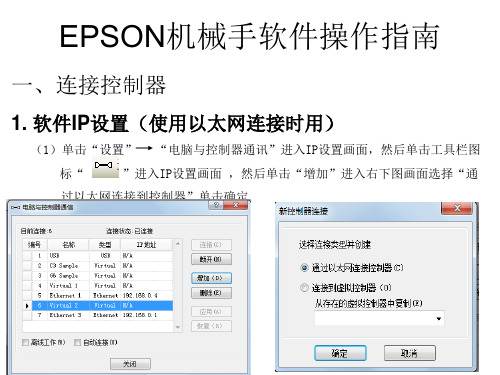
一、连接控制器
1. 软件IP设置(使用以太网连接时用)
(1)单击“设置” “电脑与控制器通讯”进入IP设置画面,然后单击工具栏图
标“
”进入IP设置画面 ,然后单击“增加”进入右下图画面选择“通
过以太网连接到控制器”单击确定
四、RC+5.4.3软件操作
(2)设置新增以太网连接名称及IP地址 ,控制器出厂默认控制器IP设置如右下图所示 设置好IP后单击应用,如果控制器IP忘记了,可以先用USB线连接控制器然后在 “设置”|控制器|configuration里可以查看控制器IP,电脑IP的前三位要与控制 器的前三位相同,例如“192.168.0.10”
四、RC+5.4.3软件操作 2、选择“控制器”单击“下一个”进入如下画面
四、RC+5.4.3软件操作
3、修改程序名称(可不修改)设定存储磁盘后,单击“下一个” 进入如下画面,然后单击“导入”即可将控制器内的程序读取出 来。
EPSON机械手培训PPT课件

Jump3/Jump3CP、 Bmove、 的指令
TMove、CVMove
NOTE: * CP模式,即Continuous Path 连续路径模式。 * 指定PTP动作指令和Joint动作指令的速度和加/减速度时,使用SPEED指令和 ACCEL指令。指定CP模式动作指令时,使用使用SPEEDS指令和ACCELS指令。
第35页/共71页
六、动作指令
2. PTP指令
包括指令:Go、Jump、BGo、TGo PTP(Pose To Pose)动作,是与其动作轨迹无关,以机械手的工具顶端为目标位臵使其动作的 动作方法。PTP动作,使用各关节上配置的电动机,使机械手通过最短的路径到达目标位置。 优点:运动速度快,缺点:运动轨迹无法预测。指定PTP动作速度和加/减速,使用SPEED指令和 ACCEL指令。
第17页/共71页
四、RC+5.4.3软件操作
2.控制器设置
(1)单击“设置” “控制器”进入控制器设置画面,然后单击“configuration” 设置控制的IP地址及控制方式,当要使用外部I/O控制时须将“Control Device” 远程I/O,然后单击“Apply”,再单击关闭,等待控制器重启完毕后,按“F5”, 单击“激活远程I/O”后关闭软件即可使用外部I/O控制控制器
(3)微动将机械手移动的需要示教点的位置。如果是SCARA机械手,Motor On情况下,可以在 Control Panel 页面Free All释放所有轴后,手动将机械手移动需要示教点的位置后,Lock ALL锁定所有轴。
微动按钮
点位追踪按钮,在马达上伺服ON时直接移动到之前示 教的点位,一般在第之2前2页点/共位7变1页化需做微调时用
3. Jump P1:Z(-10)LimZ -10 ´以限定第三轴目标坐标Z=-10的门形动作移动到P1点位臵Z坐标 第36页/共71页
爱普生机器人中级培训资料

2、机器人管理器操作
5)单击“示教”进入下图画面
2、机器人管理器操作
6)单击“示教”进入下图画面,移动机械手到第二个拐点
2、机器人管理器操作
8)选择进入工作空间时对应输出为ON或OFF(输出端口设置在“设置”—“系 统配置”—“控制器”—“远程控制”—“输出”里),“示教”进入下图画 面
2、机器人管理器操作
Integer m_i ‘模块变量m_i Global (Preserve) Integer g_i ‘全局变量(全局保护变量)g_i Function main Integer I ‘局部变量i ... Fend
2、机器人管理器操作
8)单击“示教”,进入下图画面,选择“3D工具”时进入左下图所示画面,选择
“2D工具”时进入右下图所示画面,如果提示定义成功说明工具坐标已经示教好
“3D工具”第3点需要 满足以下条件
“3D工具”第3个点示教画面
“2D工具”结果
2、机器人管理器操作
9)单击“示教”,进入下图画面,示教“3D工具”第3点需要确保U=0,V=0, W=-135,用针尖对准Mark点
否则需要重新示教。
2、机器人管理器操作
2.3 LOCAL坐标示教
2.4.1 用一个原点方式示教本地坐标 1) 在机器人管理界面单击“本地坐标”打开LOCAL坐标向导画面
2、机器人管理器操作
2) 单击“本地向导”打开LOCAL坐标向导画面
2、机器人管理器操作
3) 选择您想定义的本地号码。对于[有多少点将被使用],则选择[1–原点]。 由于这是一个本地单点,您只需示教新坐标系的原点即可。如果您想使用坐标 系方向的U,V 或W 轴,勾选[用U,V,W 本地旋转工具坐标]复选框。如果未选 中此复选框,新的坐标系是从X 和Y 轴的本Local 0 进行偏移,但不会绕着轴 旋转。
爱普生培训资料:EPSON 6轴机器人

6轴机器人坐标系
1.机器人基本坐标系:以J1 法兰中心为原点, XYZ正方向如下图(右手 定则); 2.工具0坐标系:以J6法兰 中心为原点, XYZ正方向如下图,(右 手定则)。
机器人坐标系一般是固定不变的 Tool 0 坐标系是固定在第 6 关节法兰中心的 , 所以 机器人姿势变化时 Tool 0 坐标系也相应的移动 (如图)
AutoLJM(Jump3,Go,Move,Arc)最小的动作关节移动量 Go P0 LJM
AvoidSingularity(Move,Arc)自动回避特别姿势功能 AvoidSingularity=1
6轴机器人工具坐标系向导设置步骤
U = 0, V = 0, W = 180
旋转U轴一些角度(一般180度)
工具坐标系(tool坐标系)
定义:定义在工具末端的用户坐标 应用:与轨迹相关的 应用;视觉引导、 多抓手的抓取、涂胶等
本地ቤተ መጻሕፍቲ ባይዱ标系(Local坐标系)
定义:机器人坐标系的偏移(工件坐标系) 应用:一般用于承载治具上有多个工作点的应用, 以简化示教点的操作;阵列料盘的搬运,装配, 涂胶等。
指令Jump3,Go,Move
Jump3 Here :Z(100), P0 :Z(100), P0 Jump3 Here -TLZ(100), P0 -TLZ(100), P0 Jump3 Here +Z(100), P0 +Z(100), P0
Go p0 Move p0
Go XY(x0,y0,z,u,v,w)/R /A /NF /J6F0 /J4F0 /0 如果点位是自定义的,例如由视觉像素坐标转换而来,则需要指定 各个姿势的标志。一般可以先手动到目标点位置记录下各个标志,然后再 加到后面。
(2024年)EPSON机械手导入培训

优化执行器的控制算法, 提高响应速度和运动平滑 度。
根据实际需求选择合适的 执行器类型和规格,避免 浪费和不必要的成本。
2024/3/26
11
2024/3/26
03
软件系统配置与调试
12
软件安装与设置步骤
2024/3/26
安装EPSON机械手软件
01
从官方网站下载最新版本的EPSON机械手软件,按照安装向导
机械手是一种能模仿人手和臂的 某些动作功能,用以按固定程序 抓取、搬运物件或操作工具的自 动操作装置。
机械手分类
根据驱动方式,可分为液压式、 气动式、电动式和机械式机械手 ;根据适用范围,可分为专用机 械手和通用机械手。
4
EPSON机械手特点
2024/3/26
高精度
EPSON机械手采用高精度伺服驱动系统 ,实现精确定位和高速运动。
21
故障诊断与排除方法
若机械手出现运动故障, 首先检查电机和驱动器是 否正常,然后逐步排查传 感器、控制系统等可能的 问题来源。
2024/3/26
当机械手无法准确抓取或 放置物品时,需检查末端 执行器的状态,调整其抓 取力度和位置。
若发现电缆或气管破损导 致机械手运动异常,应立 即停机并更换损坏部件。
市场需求
随着制造业的转型升级和人力成本的上升,市场对高效、智能、柔性的自动化 设备需求不断增长,EPSON机械手作为其中的重要组成部分,具有广阔的市场 前景。
2024/3/26
6Leabharlann 2024/3/2602
EPSON机械手硬件组成
7
主体结构与功能
2024/3/26
机械臂
高精度、高刚性的机械臂,实现高速、高 精度的运动控制。
爱普生机器人选型以及详细安装参数

EPSON 机械手综合商品目录信赖产生进步爱普生机械手爱普生机械手起始于1981年开发SEIKO手表的组装机械手。
当时开发的目标是制造出前所未有的能够髙精度、高效率地安装精密部件的机械手。
此后的各种技术经验继承了原有的爱普生机械手所具有的高精度、高速度和高可靠性,在此基础上我们正向着 节省技术(节省空间、节省电力)及先进的控制技术而迈进。
EPSON满足可扩展性及其他各种需求系统构成S C A R A机械手E2C , j•臂长250/350mm■标准/防尘型•多置式*可搬重量额定1kg/最大3kg E2L•臂长650/850mm•标准/防尘型•可搬重量额定2kg/最大5kg E2S* 臂长450/550/650mm*标准/防尘型•多置式•可搬重量额定2kg/最大5kgE2H•臂长850mm*标准/防尘型•可搬重量额定2kg/最大20kg模块式机械手EZ模块•多变的行程变化•单轴〜4轴规格•可搬重量80kg〜2kg•X轴:400-1000mm300~750mm200-400mm±360°Y轴:Z轴:U轴:6轴机械手ProSix•臂长791 m m•可搬重量3kg机械手控制器m t f z w.wRC420*压缩了R C520功能的—体型单箱控制器fi i i l1■:|_-RC520•具备丰富的选项规格和超强扩展性的工作单元控制器I N D E X索引S C A R A机械手E2C.03E2S«07E2L• 11E2H*13EZ模块EZ模块构成叫5单轴.162轴.173轴 *194轴.20ProSix «21程序开发软件EPSON RC+ *23S P E LC T*23机械手控制器RC420 •24RC520-25程序开发软件选项EPSON RC+I扩展I/OVisionGuide跟踪传输PG动作系统OP500RCVBGuide许可证安全许可证1SPEL CTI扩展丨/0脉冲输出基板'远程I/O'OP5001独立选择'用户操作调谐选择Vision Guide *27跟踪传输*28操作附件«28多任务机械手语言*29产品互联网信息http://fa.epson.co.jp爱普生引以为荣的超精密技术为核心的机械手。
EPSON机器人介绍

爱普生机械手4轴6轴线性模组SEIKO EPSON CORPORATION FA機器部EPSON机械手的由来 EPSON机械手的由来 机械手的由来开始于对手表的小型零部件的高精度、高效率组装25年的销售业绩!业界最高的市场份额 年的销售业绩!手表组装生产线 “業界初”の創出 業界初”SEIKO EPSON CORPORATION FA機器部EPSON机械手的由来 EPSON机械手的由来 机械手的由来成立时间: 1981 精工要求爱普生设计的手表装配机器人性能是:高精度, 精工要求爱普生设计的手表装配机器人性能是:高精度,高速度爱普生装配机器人从此诞生Watch assembly line 1984 TAF-M line爱普生机器人的优势 “ 智能运动控制技术” 高速度的过程中保证了高精度的技术SEIKO EPSON CORPORATION FA機器部EPSON机械手装配手表机芯 EPSON机械手装配手表机芯 机械手装配手表机芯精工手表机芯零部件VIDEO精工手表机芯SEIKO EPSON CORPORATION FA機器部EPSON机械手推动了行业技术的发展 EPSON机械手推动了行业技术的发展 机械手推动了行业技术的发展360 degrees turn W SCARA RS3 seriesW1980’sWSafety standard (UL) for small robot20091980’sWArch motion Wall/Ceiling mounting SCARAMultitaskW W WPC based controllerFirst Mass production modelSuper clean 6-axisShort arm Robot system SCARA supporting WindowsWW: World’s firstSEIKO EPSON CORPORATION FA機器部(Research by EPSON)使用领域 使用领域医疗相关 3% 民生品 8% 其他 9% 摩托车 摩托 车 3% 医药品 3% 保安 0% 汽车 31%电器, 电子 17%PC相 PC 相 关 26%SEIKO EPSON CORPORATION FA機器部爱普生机械手 爱普生机械手 ■精密组装机器人在高速运动状态下具备低残留震动及高精度 应答时间短,动作灵敏 在3维状态下仍然保证轨迹平滑精密■图象机器人通过机械手及摄像装置的组合可以轻松地满 足多品种生产的需求。
EPSON机械手导入培训(2024)

调试步骤详解
连接电源和信号线
开机启动
按照说明书要求,正确连接机械手的电源 线和信号线,确保设备能够正常通电和接 收信号。
接通电源后,按下开机按钮,等待机械手 启动完成。
初始化设置
功能测试
根据实际需求,对机械手进行初始化设置 ,包括选择语言、设定时间、配置网络等 。
2024/1/30
在调试过程中,对机械手进行各项功能测试 ,如抓取、移动、定位等,确保设备能够正 常运行。
9
选型案例分析
2024/1/30
案例一
某汽车零部件生产企业,需要一款能够高效、准确地完成发动机装配作业的机械手。经过 分析,我们为其推荐了具有高负载能力、高精度定位功能和视觉系统的EPSON机械手, 成功满足了其生产需求。
案例二
某电子制造企业,需要一款能够灵活地完成电路板检测作业的机械手。我们为其提供了具 有小负载能力、高精度定位功能和力觉传感器的EPSON机械手,成功实现了电路板的自 动化检测。
迈进了一步。
学员C
本次培训不仅让我了解了 EPSON机械手的基本操作和应 用领域,还让我结识了一群志同 道合的朋友,激发了我对机械手
未来的无限期待。
2024/1/30
26
THANKS
感谢观看
2024/1/30
27
检查设备完整性
在安装前,仔细检查机械手设备是否 完好无损,各部件是否齐全,以确保 安装顺利进行。
2024/1/30
准备安装工具和材料
提前准备好所需的安装工具,如螺丝 刀、扳手等,以及必要的安装材料, 如螺丝、垫片等。
确认安装位置和空间
选择合适的安装位置,确保机械手设 备能够稳定放置,并留有足够的操作 空间。
爱普生4轴机械手维修手册
爱普生4轴机械手维修手册(最新版)目录1.爱普生 4 轴机械手简介2.维修手册的作用和重要性3.机械手的故障排除流程4.常见故障及解决方法5.维护和保养建议6.结论正文一、爱普生 4 轴机械手简介爱普生 4 轴机械手是一款广泛应用于各种工业领域的自动化设备,以其出色的性能和稳定的运行而受到用户的青睐。
它主要由臂、手腕、手抓和控制系统组成,能够在多个轴向上进行灵活的运动,实现精确的定位和抓取。
二、维修手册的作用和重要性维修手册是机械手使用和维护过程中必不可少的参考资料,它包含了机械手的结构原理、操作方法、故障排除等重要信息。
正确地使用和维护手册,可以有效地提高机械手的运行效率和寿命,避免因故障造成的生产损失。
三、机械手的故障排除流程1.故障现象分析:根据机械手的异常表现,初步判断可能的故障原因。
2.故障部位定位:利用维修手册,针对性地进行检查,找出故障的具体部位。
3.故障原因分析:分析故障原因,可能是机械部件的损坏,也可能是操作或设置不当。
4.故障处理:根据故障原因,采取相应的处理措施,如更换损坏部件、调整操作参数等。
5.故障验证:处理完毕后,进行试验验证,确保故障已排除。
四、常见故障及解决方法1.机械手无法正常启动:检查电源线、插座和开关是否正常,如有问题则修复或更换。
2.运动轴无法正常运动:检查轴电机、驱动器和编码器是否正常,如有问题则修复或更换。
3.手抓无法正常抓取:检查手抓内部的吸盘或夹具是否损坏,如有问题则修复或更换。
4.控制系统故障:检查控制系统的硬件和软件是否正常,如有问题则修复或升级。
五、维护和保养建议1.定期检查:按照维修手册的建议,定期对机械手进行全面检查,发现问题及时处理。
2.保持清洁:保持机械手及其工作环境的清洁,防止灰尘和油污影响运行。
3.合理使用:遵循机械手的使用规范,避免超负荷运行,减少不必要的故障。
4.定期保养:按照维修手册的建议,定期对机械手进行保养,如润滑、更换易损件等。
EPSON机械手导入培训教材(PPT55页)

为什么使用要机器人
• 替代人工,解决近几年人工成本的增长和招工难的问题 • 人不愿意做的工作,恶劣环境下的工作,比如噪音大的环
境,污染的环境等等。 • 需要精度较高,人手难以实现的工作,比如中源的帖胶项
目很难用治具人工操作。 • 集成度高使用方便,减少设备开发周期。 • 稳定性 • 机器人可工作24小时 • 消费者对商品多样化的需求
2
什么是工业机器人
工业机器人(industrial robot,简称RI):
是集机械、电子、控制、计算机、传感器、人工智能等多个学科先进 技术于一体的现代制造业重要的自动化装备 ;广泛适用的能自主动作,且 多轴联动的机械设备 ;自从1962年美国研制出世界第一台工业机器人以来, 机器人技术及其产品发展很快,已经成为柔性制造系统(FMS),自动化 工厂(FA),计算机集成制造系统(CIMS)的自动化工具。
应用领域:
装货、卸货、焊接、包装、固定、 涂层、粘结、封装、特种搬运操作、装 配等。
8
工业机器人的的特点
6轴机器人特点:
有6个关节(六个自由度)X、Y、Z、U、 V、W,适合于几乎任何轨迹或角度的工作可 以自由编程,完成全自动化的工作 ,提高生 产效率。
应用领域:
应用领域有装货、卸货、喷漆、表面处 理、测试、测量、弧焊、点焊、包装、装配、 切屑机床、固定、特种装配操作、锻造、铸造 等。
second 7900 mm/s
RC180/ RC620
G10/20
10~20Kg
± 0.025 mm
650~1000 mm 0.38
second 11000 mm/s RC180/ RC620
RS3
3Kg
± 0.01 mm 350 mm 0.36
EPSON机械手培训-课件

学习效果评估
阶段性测验
参加阶段性测验,对自 己的学习效果进行评估 ,及时发现和弥补知识 漏洞,提高学习质量。
模拟考试与练习
参加模拟考试和练习, 熟悉考试形式、题型、 难度等,提高答题速度 和准确性。
复习巩固与拓展
定期复习巩固所学知识 ,查漏补缺,同时拓展 相关领域的知识和技能 ,提升个人综合实力。
06
《epson机械手培训-课件》 学习指南
学习目标与计划
了解课程内容和目标
详细了解《epson机械手培训-课件》的课程结构和目标,以 便明确学习方向和重点。
制定学习计划
根据自身学习情况和时间安排,制定详细的学习计划,包括 每日学习任务、学习时间分配等,以便合理高效地安排学习 时间。
学习方法与技巧
MoveIt
一个专门为机器人运动控制设计 的开源软件库,提供了直观的运 动规划框架和交互式界面
Player/…
一个经典的机器人仿真平台,提 供了多种传感器和控制器,可用 于机器人底层控制
机械手的控制方式及实现
直接控制
轨迹控制
通过发送关节角度指令来直接控制机械手的 运动
通过规划机器人末端执行器的运动轨迹来控 制机械手的运动
手术辅助
机械手在手术中具有稳定、精确的操作特点,可 用于辅助医生进行各种高难度手术。
康复治疗
机械手可以辅助患者进行康复训练,如肢体康复 、肌肉训练等。
医疗应用
在医疗领域,机械手还被广泛应用于样品采集、 药物分发、消毒等工作。
机械手在其他领域的应用优势
服务业
在服务业中,机械手可以进行各种任务,如餐厅传菜、快递配送 、酒店服务等工作。
定位与姿态调整
机械手通过各部件的协调动作,将 物体移动到指定位置,并调整物体 的姿态。
EPSON机器人介绍

爱普生机械手爱普生机械手爱普生机械手爱普生机械手 爱普生机械手爱普生机械手爱普生机械手爱普生机械手爱普生机械手爱普生机械手爱普生机械手爱普生机械手44轴轴轴轴轴轴轴轴66轴轴轴轴轴轴轴轴线性模组线性模组线性模组线性模组EPSON 机械手的由来机械手的由来机械手的由来机械手的由来EPSONEPSON 机械手的由来机械手的由来机械手的由来机械手的由来机械手的由来机械手的由来机械手的由来机械手的由来手表组装生产线手表组装生产线手表组装生产线手表组装生产线 开始于对手表的小型零部件的高精度、高效率组装2525252525252525年的销售业绩年的销售业绩年的销售业绩年的销售业绩!!!!业界最高的市场份额业界最高的市场份额业界最高的市场份额业界最高的市场份额年的销售业绩年的销售业绩年的销售业绩年的销售业绩!!!!业界最高的市场份额业界最高的市场份额业界最高的市场份额业界最高的市场份额 ““業界初業界初業界初業界初業界初業界初業界初業界初””””””””のののの創出創出創出創出のののの創出創出創出創出精工要求爱普生设计的手表装配机器人性能是精工要求爱普生设计的手表装配机器人性能是精工要求爱普生设计的手表装配机器人性能是精工要求爱普生设计的手表装配机器人性能是::::高精度高精度高精度高精度,,,,高速度高速度高速度高速度爱普生装配机器人从此诞生爱普生机器人的优势爱普生机器人的优势爱普生机器人的优势爱普生机器人的优势““智能运动控制技术智能运动控制技术智能运动控制技术智能运动控制技术智能运动控制技术智能运动控制技术智能运动控制技术智能运ⷰⷰ高速度的过程中保证了高精度的技术高速度的过程中保证了高精度的技术高速度的过程中保证了高精度的技术高速度的过程中保证了高精度的技术 Watch assembly line 1984 TAF-M lineEPSON 机械手的由来机械手的由来机械手的由来机械手的由来EPSONEPSON 机械手的由来机械手的由来机械手的由来机械手的由来机械手的由来机械手的由来机械手的由来机械手的由来精工手表机芯零部件精工手表机芯零部件精工手表机芯零部件精工手表机芯零部件精工手表机芯精工手表机芯精工手表机芯精工手表机芯VIDEOVIDEOEPSON 机械手装配手表机芯机械手装配手表机芯机械手装配手表机芯机械手装配手表机芯EPSONEPSON 机械手装配手表机芯机械手装配手表机芯机械手装配手表机芯机械手装配手表机芯机械手装配手表机芯机械手装配手表机芯机械手装配手表机芯机械手装配手表机芯Super clean First Massproduction6-axisRobot system supporting WindowsPC based controllerShort arm SCARAWall/CeilingmountingSCARA360 degrees turnSCARARS3 seriesWWWWW: World’s first(Research by WMulti-taskWArchmotionWSafety standard(UL)for small robotWEPSON 机械手推动了行业技术的发展机械手推动了行业技术的发展机械手推动了行业技术的发展机械手推动了行业技术的发展EPSONEPSON 机械手推动了行业技术的发展机械手推动了行业技术的发展机械手推动了行业技术的发展机械手推动了行业技术的发展机械手推动了行业技术的发展机械手推动了行业技术的发展机械手推动了行业技术的发展机械手推动了行业技术的发展PCPCPCPC 相相相相关关关关 26%26%26%26%汽汽汽汽车车车车 31%31%31%31%医医医医药药药药品品品品 3%3%3%3%摩托摩托摩托摩托车车车车3%3%3%3%医医医医疗疗疗疗相相相相关关关关 3%3%3%3% 民生品民生品民生品民生品8%8%8%8% 其他其他其他其他9%9%9%9% 电电电电器器器器,,,,电电电电子子子子17%17%17%17% 保安保安保安保安0%0%0%0%使用领域使用领域使用领域■■■■■■■■精密组装机器人精密组装机器人精密组装机器人精密组装机器人精密组装机器人精密组装机器人精密组装机器人精密组装机器人綈綈在高速运动状态下具备低残留震动及高精度在高速运动状态下具备低残留震动及高精度綈綈应答时间短,动作灵敏应答时间短,动作灵敏綈綈在在33维状态下仍然保证轨迹平滑精密维状态下仍然保证轨迹平滑精密■■■■■■■■图象机器人图象机器人图象机器人图象机器人图象机器人图象机器人图象机器人图象綈綈通过机械手及摄像装置的组合可以轻松地满通过机械手及摄像装置的组合可以轻松地满足多品种生产的需求。
EPSON机械手培训-课件

编程语言
EPSON机械手支持多种编程语 言,如ST、MOV、PTP等,可
根据实际需求选择。
常用指令
在编程过程中,常用的指令有 SET(设置)、MOV(移动) 、PTP(点对点)、CIRC(圆
弧插补)等。
变量与函数
编程过程中需要使用到变量和 函数来对机械手进行更精确的 控制,如POS(获取位置)、
SPEED(设置速度)等。
04
机械手操作和维护保养
机械手操作规程
01
02
03
机械手操作前检查
在操作机械手前,需对机 械手进行全面检查,包括 电源、气源、机械部分等 。
操作步骤
在操作机械手时,需按照 规定的步骤进行,包括启 动、停止、急停等操作。
安全注意事项
在操作机械手时,需注意 安全,避免操作过程中出 现人员伤害或设备损坏等 情况。
重复定位精度可以达到微米级,能够满足各 种高精度生产线和自动化应用的需求。
产品应用范围
Epson机械手广泛应用于电子、半导体、汽车制造、塑料、食品包装、制药等领 域。
这些机器人可以用于各种高精度生产线、自动化生产线、包装生产线、物料搬运 等场景,提高生产效率、降低劳动强度、提升产品质量。
Epson机械手还可以用于各种危险环境和精密作业,如高温、高压、高污染、放 射性等环境,以及需要高精度定位和稳定控制的作业场景。
机械手的维护和保养
定期保养
定期对机械手进行保养, 包括润滑机械部分、检查 紧固件等。
维护内容
每次保养时,需对机械手 进行检查,包括电源、气 源、机械部分等。
保养周期
保养周期可根据实际情况 确定,一般可设定为1个 月或2个月一次。
05
epson机械手培训课程设计
爱普生机器人初级教学

3.1 Move 指令
功能:以直线轨迹将机械手从当前位置移动到指定目标位置。全关节同时启动,同时停 止。 格式:Move 目标坐标 示例:Move P1 ´机械手以直线轨迹动作到P1点 NOTE: Move与Go的区别到达目标点时的手臂的姿势重要的时候使用Go命令,但是比控制动作 中的手臂的轨迹重要的时候,使用Move 命令。在SCARA机械手只有Z轴上下动作时, 36 Go与Move的轨迹一样。
2.2 Jump 指令
功能:通过“门形动作”使手臂手臂从当前位臵移动至目标坐标。 图1 格式:Jump 目标坐标 示例: 1. Jump P1 ´机械手以“门形动作”动作到P1点 2. Jump P1 LimZ -10 ´以限定第三轴目标坐标Z=-10的门形动作移动到P1点,如图1示 3. Jump P1:Z(-10)LimZ -10 ´以限定第三轴目标坐标Z=-10的门形动作移动到P1点位置Z坐标
2.1 Go 指令
功能:全轴同时的PTP动作,动作的轨迹是各关节分别对从当前的点到目标坐标进行插补。 格式:Go 目标坐标 示例: 1. Go P1 ´机械手动作到P1点 2. Go XY(50, 400, 0, 0) ´机械手动作到X=50,Y=400,Z=0,U=0 3. Go P1+X(50) ´机械手动作到P1点X坐标值偏移量为+50的位置 4. Go P1:X(50) ´机械手动作到P1点对应X坐标值为50的位置
EPSON 机械手培训
1
内容 一、关于机械手的基础知识 二、硬件概要 三、EPSON RC+ 用户界面 四、RC+软件操作 五、SPEL+语言 六、动作指令 七、I/O 八、Pallet 九、!...! 并列处理 十、多任务处理 十一、循环控制指令 十二、程序实例
2024版EPSON机械手导入培训

THANKS
感谢观看
包括机械结构、传感器、控制系统等方面的知识,以及EPSON机械手
的工作原理和操作流程。
02
导入步骤与操作技巧
详细介绍了EPSON机械手的导入步骤,包括设备连接、参数设置、程
序编写等,同时分享了操作技巧,如如何快速定位、优化路径等。
03
常见问题与解决方案
总结了在使用EPSON机械手过程中可能遇到的常见问题,如设备故障、
软件故障排除
重新安装或更新控制系统软件,解决软件错误或 崩溃问题。
ABCD
电气故障排除
检查电源、电机、传感器等电气部件,修复或更 换故障部件,确保电气系统正常工作。
通信故障排除
检查通信线路和接口,恢复与上位机或其他设备 的正常通信。
06
培训总结与展望
关键知识点回顾与总结
01
EPSON机械手的基本构成和原理
保养计划
根据机械手的使用情况和保养要求, 制定合理的保养计划并按时执行。例 如,定期更换润滑油、清洗过滤器等。
日常维护
定期对机械手进行日常维护,包括清 洁设备表面、检查紧固件是否松动、 更换磨损件等。同时,注意保持设备 周围环境的整洁和干燥。
故障处理
如遇到故障或异常情况,及时联系技 术支持或专业维修人员进行处理,切 勿自行拆卸或修理设备。
04
编程开发与集成应用
编程语言介绍及环境搭建
EPSON机械手支持的编程语言
EPSON机械手主要使用EPSON RC+编程语言进行开发,这是一种专门为EPSON机 械手设计的编程语言,具有直观易懂的语法和丰富的功能库。
编程环境搭建
为了进行EPSON机械手的编程开发,需要先安装EPSON RC+编程软件。安装步骤 包括下载软件安装包、安装软件、配置开发环境等。在安装过程中,需要确保计算 机与机械手的连接正常,以便进行后续的编程和调试工作。