高空作业车的液压系统
GKZ高空作业车液压和电气控制系统设计(附全套图纸)

目录摘要 (3)第一章绪论 (3)1.1 空作业车的的现状和发展趋势 (6)1.2 课题的来源和意义 (8)第二章液压系统设计 (9)2.1 本参数及主要技术性能指标 (9)2.1.1 行驶状态主要技术参数 (9)2.1.2 作业状态主要技术参数 (9)2.1.3 作业车平台作业工作状态图 (9)2.1.4 机构简述 (11)2.2 液压系统的构成 (13)2.3 各系统工作原理简述 (13)2.4 主要机构液压回路的设计与分析 (14)2.4.1 升机构的回路设计 (14)2.4.2 伸缩机构回路设计 (16)2.4.3 回转机构回路设计 (17)2.4.4变幅机构回路设计 (17)2.4.5整体液压回路设计 (18)2.5 主要液压元气件的选择与计算 (20)2.5.1 液压泵的确定 (20)2.5.2 上下臂液压缸确定 (21)2.5.3 液压马达选择 (23)2.5.4 换向阀的选择 (24)2.5.5 油箱有效容的积确定 (25)第三章电气控制系统设计 (26)3.1 电气控制方案的确定 (26)3.1.1 高空作业机构的电气控制电路 (26)3.1.2 通讯装置 (27)3.1.3 选择开关装置 (27)3.1.4 总的控制电路 (27)3.2 电气元器件的选择 (28)3.2.1 按钮的选用 (28)3.2.2 行程开关的选用 (30)3.2.3 热继电器的选用 (30)3.2.4 熔断器的选用 (30)3.2.5 电线的选择 (31)3.2.6 照明电器选择 (31)3.2.7 变压器的选择 (32)第四章电气控制面板的操作 (33)4.1 转台处控制箱操作面板及其操作件介绍 (33)4.2 平台(吊篮)控制箱操作面板及操作元件 (34)4.3 高空作业电气部分操作方法 (35)4.4 高空作业操作中注意事项 (35)附录 (37)附录1 (37)附录2 (37)附录3 (39)附录4 (39)附录5 (40)结论 (42)后记 (43)参考文献 (44)GKZ高空作业车液压和电气控制系统设计摘要高空作业车广泛用于建筑、市政、机场、工厂、园林、住宅等场所,从事消防、抢险救灾、安装、维护等工作。
曲臂式高空作业车液压系统设计及研究
曲臂式高空作业车液压系统设计及研究蒙杨超;董自安;肖泽桦;王珂【摘要】The rapid development of hydraulic technology makes firm or stable the technical basis for developing aer-ial vehicles. By aerial overall design requirements, the completion of aerial main unit and its corresponding hydrau-lic system are designed. Crank aerial vehicles are made up the chassis, power systems, hydraulic systems, expanding the bridge device, steering device, turning device, luffing devices, telescopic device, leveling device, the job bucket swing devices and electronic control systems and other accessories. The actuator control system needs more control and needs more proportional control actuator characteristics, the system uses a form of control cartridge valve block built proportional flow control valve to achieve the requirements of the work unit coordinated control of multi-task-ing. As an independent driver of the vehicle, walking drive system design is one of the key technologies of the vehi-cle. In order to achieve remote speed performance running the system and achieve energy efficiency, stable perfor-mance, we use a variable displacement pump hydraulic closed loop control circuit in the form of a two-speed motor drive system as walking. In this paper, based on the design principle of the hydraulic system, a detailed discussion of the crank-propelled aerial work vehicle hydraulic system design approach is introduced, which provids a comprehen-sive design methodology and platform for the design of all types of aerial vehicles hydraulic system.%液压技术的快速发展给我国高空作业车的开发、研制奠定了技术基础。
自行式高空作业车液压系统设计特点

目录(一)用途与特点。
2(二)整机对液压系统的要求.。
3(三)液压系统设计方案.。
5(四)液压原理图绘制.。
6(五)26米自走车计算。
7(六)产品市场与前景分析.。
17(七)经济效益.。
171一、用途与特点高空作业车在国民经济建设的许多行业被广泛地采用,如工业与民用高层建筑的施工与维护、水利电气工程安装、高空消防与救援以及现代化军事雷达设备的保养维护。
随着经济的发展,人力资源成本的不断提高,机械化取代人力的趋势进一步加快,国外农业果树的采摘都要用到小型高空车。
因此,市场有着广阔的发展空间,发展满足我国国情所需要的高空车是十分必要的。
而液压系统作为高空车最重要组成部分,对其研究和控制是对整机开发的基础高空作业车的特点是悬臂长易颤动,而平台上的微小抖动通过长长工作臂传递到工作斗上都会放大很多倍,因此,作业要求运行平稳,尽力减小震颤,任何情况下都要求安全可靠,不得造成人员的损伤。
而整个的作业动作都是由液压系统来完成的,这就对液压系统的设计提出了很大的要求,要求尽力的保证作业性能,满足高空作业的要求。
高空作业车液压系统早期都是由汽车起重机的液压系统改造而成,外表一样而作业性能要求完全不一样,高空车液压系统的设计资料很少。
随着液压技术的进步,近几年的高性能的液压控制阀不断出现,采用新型液压阀的液压系统的设计不断出现,下面就笔者在实际设计中的一种采用新的插装阀,设计的一种适合厂区作业,移动方便的自走式高空作业车的液压系统及系统计算做一论述。
2二、整机对液压系统的要求根据自走式高空作业车的工作特点和具体的工况,液压系统需满足作业动作要求和系统工作要求1.自走式高空作业车的作业动作要求1)保证工作臂的起落、伸缩,可以各自单独动作,也可以相互配合实现复合动作2)保证工作臂的动作与回转平台的回转动作既能单独进行,又能作复合动作,提高的作业效率。
3)工作臂的变幅起落,要保证工作斗的水平。
4)在工作斗上,可以操作行走,移动作业位置。
高空作业车工作原理
高空作业车工作原理全文共四篇示例,供读者参考第一篇示例:高空作业车是一种专门用于高空作业的机械设备,它能够帮助工人在高空环境中进行各种作业,如修缮建筑物、清洁窗户、维修电线等。
通过高空作业车,工人可以安全、高效地完成工作,提高工作效率,减少工伤事故的发生。
高空作业车的工作原理主要是通过液压系统和电气控制系统来实现的。
液压系统主要包括液压泵、液压缸、液压管路和控制阀等部件,它们共同协作完成高空作业车的升降、伸缩和旋转等功能。
电气控制系统则是通过电气设备控制高空作业车的运行,实现各种功能的控制和操作。
高空作业车的升降功能是通过液压泵将液压油输送到液压缸中,液压缸在液压油的作用下推动高空作业车的臂部升起或下降。
液压泵通过控制阀控制液压油的流量和流向,从而实现高空作业车的升降功能。
高空作业车的伸缩功能是通过液压缸伸缩部件的伸缩来实现的,液压缸伸缩部件可以使高空作业车的臂部在水平方向上伸缩,从而实现跨越障碍物或达到远处目标的功能。
除了升降、伸缩和旋转功能外,高空作业车还具有安全保护装置,如限位开关、超载保护装置、防倾覆装置等,以保证高空作业车在高空作业过程中的安全性和稳定性。
高空作业车还配备了作业篮、操作台和遥控器等设备,方便工人进行高空作业。
高空作业车的工作原理是通过液压系统和电气控制系统协作完成高空作业车的升降、伸缩和旋转等功能,保障工人在高空作业环境中的安全和高效作业。
高空作业车的运用大大提高了工作效率,减少了工伤事故的发生,对现代工程施工和维护起到了重要的作用。
【字数:407】第二篇示例:高空作业车是一种用于在垂直或近似垂直方向上进行工作的特种设备。
其主要用途是用于在高空进行施工、维修、清洁等作业。
高空作业车可以帮助工人在不易到达的高处进行作业,提高工作效率和安全性。
本文将介绍高空作业车的工作原理及其关键部件。
高空作业车通常由底盘、折臂、升降机构、液压系统、电气系统等部分组成。
底盘是高空作业车的基础部件,通常由起重机底盘、搬运车底盘或其他特种车辆底盘改造而成。
曲臂式高空作业车
曲臂式高空作业车简介曲臂式高空作业车是一种用于高空作业的特种工程车辆,通过其独特的曲臂设计,能够有效地携带和举升工作人员和设备,并在高空作业环境中完成各种任务。
本文将介绍曲臂式高空作业车的工作原理、组成部分、使用注意事项以及市场应用等方面。
工作原理曲臂式高空作业车通过液压系统驱动臂架进行伸缩和旋转,以完成高空作业任务。
它的工作原理可以简单描述如下:在使用前,工作人员首先将车辆移动到作业位置,并使用支腿固定车辆以确保稳定。
随后,通过操纵台上的控制杆,工作人员可以控制液压系统将臂架伸展到所需的高度,并在需要时进行旋转。
最后,工作人员可以站在平台上进行作业,曲臂式高空作业车将保持稳定并为其提供安全的工作环境。
组成部分曲臂式高空作业车通常由以下几个主要组成部分组成:1.底盘:底盘是整个车辆的基础,可提供运动和稳定支撑。
底盘通常由车轮、驱动系统和悬挂系统等组成。
2.曲臂:曲臂是曲臂式高空作业车的核心组件,用于支撑平台和提供高度和方向的移动。
曲臂通常由多个可伸缩节段组成,使其可以根据需求进行伸展和收缩。
3.平台:平台是工作人员和设备进行作业的区域。
曲臂式高空作业车的平台通常具有边界和安全设施,以确保工作人员的安全。
4.控制系统:控制系统是曲臂式高空作业车的重要组成部分,用于操纵和控制车辆的运动。
通常,控制系统由多个操作杆、按钮和面板组成,以实现对车辆各部分的控制。
使用注意事项使用曲臂式高空作业车时,应注意以下事项以确保安全和高效的作业:1.操作前应仔细阅读使用手册和安全说明,了解车辆的操作原理和操作方法。
2.在开始作业前,应检查曲臂式高空作业车的各项功能是否正常,包括液压系统、平台安全装置和控制系统等。
3.在使用过程中,应保持良好的平衡,并根据情况调整和固定车辆的支腿。
4.注意检查曲臂式高空作业车的工作区域,确保周围没有障碍物或危险物。
5.在使用过程中,应根据需要正确调整曲臂和平台的高度和方向,以确保工作人员和设备的安全。
云梯车升降工作原理
云梯车升降工作原理
云梯车是一种高空作业设备,具有升降和旋转的多功能性能,广泛应
用于建筑、维修、清洁等领域。
下面将详细介绍云梯车的升降工作原理。
云梯车的升降系统主要由液压系统、控制系统、升降装置等组成。
液
压系统是云梯车升降的动力源,通过油泵将高压油进入油缸,驱动云
梯车进行升降。
控制系统则负责对液压系统的调节和控制,使云梯车
能够在不同高度和角度运转。
升降装置则包括升降臂和平台,通过伸缩、旋转、升降等运动,完成高空作业任务。
具体来说,云梯车的升降原理是通过液压缸的作用,实现升降臂的伸缩。
当油泵将高压油输入液压缸时,液压缸内的柱塞便开始向外伸出,推动升降臂的运动。
当柱塞收回时,升降臂也会随之收回。
通过不断
的伸缩运动,升降臂可以实现不同高度的升降。
在云梯车的升降过程中,控制系统起着至关重要的作用。
控制系统可
以对液压油进行调节和控制,从而控制液压缸的伸缩速度和力度。
同时,控制系统还可以实现升降臂旋转和平台升降等多种功能,使云梯
车可以在多个维度上进行升降和运动。
除了液压系统和控制系统,云梯车的升降还涉及到安全系统的作用。
安全系统主要包括高度计、限位器、溜槽等装置,在升降过程中监测
云梯车的高度和位置,保证云梯车在安全范围内运行。
总的来说,云梯车的升降工作原理是利用液压缸的运动,实现升降臂
的伸缩,通过控制系统的调节和安全系统的保护,完成高空作业任务。
随着技术的不断进步和应用的广泛,云梯车的升降工作原理正在不断
创新和改进,为高空作业提供更加安全和高效的解决方案。
GKZ高空作业车液压系统设计

优秀设计高空作业车液压系统设计摘要高空作业车是将高空作业人员和必要的工具送至空中,并提供工作人员空中作业场所的机械。
起重机是一种能在一定范围内垂直起升和水平移动物品的机械,动作间歇性和作业循环性是起重机工作的特点。
本次设计以徐州海伦哲工程机械有限公司研制开发的“GKZ14型高空作业车”为研究对象,对该车上的液压系统进行设计。
此型号高空作业车除高空作业机构外还设有起重装置,一机多用。
高空作业部分主要是指控制上下臂变幅运动的液压缸,控制上下臂回转运动的液压马达。
起重部分主要是控制伸缩臂伸缩运动的液压缸,以及控制起重钢丝绳收进放出的液压马达。
本文着重高空作业机构的变幅液压缸和回转液压马达设计,简略起重机构。
文中详细记录了高空作业机构上臂液压缸的设计过程,简略设计下臂液压缸以及起重机构部分的伸缩液压缸;记录了高空作业部分回转机构的液压马达和起重部分起升机构的液压马达的设计选型过程,以及液压泵,油箱的选型过程。
在确定液压系统元件参数的基础上,完成了液压传动系统的设计计算。
关键词:高空作业车;起重机构;液压传动系统设计;液压缸;液压马达AbstractThe aerial platform vehicle sends high rise operation personnel and the tool of the necessity to the air, and provide the staff member with the high rise operation amenity machine.The derrick is a kind of machine that cans be perpendicular in the certain scope to rise to rise to move a product with level, the action by fits and starts and the homework circulation are the characteristicses of the derrick work, can press the main use and the structure characteristic classification. The high rise operation mechanism mainly is the fluid cylinder that the control points a top and bottom arm to luffe, and the hydranlic moter to control top and bottom arm turns around.Jack mechanism mainly is a control flexible sport of flexible arm of the liquid press an urn, rise a heavy steel wire rope to accept into let out of the liquid press motor.This text emphasizes high rise operation mechanism to become a liquid to press an urn and turns round design, Chine is a jack mechanism slightly.Recorded high empty homework organization parts of upper arm liquids to press the design process of the urn in detail in the text, Chien designed slightly the arm liquid press the flexible liquid of the urn and the jack mechanism part to press an urn.It recorded high rise operation mechanism to turn round the liquid of the organization to press motor and rise heavy part to rise to rise the design that the liquid of the organization presses motor to choose a process in the text, and the liquid press a pump, the fuel tank chooses a process.Base on the system component parameter in hydranlic , completed the designion and calculation of the hydranlic system.Keywords: aerial platform vehicle;jack mechanism ;hydranlic system design;fluid cylinder;hydrauhc motor.目录摘要 (1)Abstract (2)前言 (3)第1章绪论 (4)1.1 高空作业车的发展状况 (4)1.2 课题的来源和意义 (4)1.3 基本参数及主要技术性能指标 (5)第2章液压系统设计 (8)2.1 液压系统的构成 (8)2.2 液压系统设计概述 (8)2.3 设计依据 (8)2.4 主要机构简述 (9)2.5 主要工作机构液压回路设计 (10)2.5.1 高空作业车起升机构的液压回路设计 (10)2.5.2 高空作业车吊臂伸缩机构液压回路设计 (12)2.5.3 高空作业车回转机构液压回路 (12)2.5.4 高空作业车变幅机构液压回路设计 (13)2.6 整体液压回路设计 (14)第3章高空作业部分液压系统的设计计算 (18)3.1 上臂油缸的设计 (18)3.1.1 确定液压缸类型和安装方式 (18)3.1.2 确定液压缸的主要性能参数和主要尺寸 (18)3.2 下臂油缸的设计计算 (23)3.2.1 确定液压缸类型和安装方式 (23)3.2.2 确定液压缸的主要性能参数和主要尺寸 (23)3.3 回转机构液压马达设计 (28)3.3.1 转矩计算 (28)第4章起重机构的液压部分设计 (31)4.1 伸缩机构液压缸设计 (31)4.1.1 确定液压缸类型和安装方式 (31)4.1.2 确定伸缩液压缸的主要性能参数和主要尺寸 (31)4.2 起升机构液压马达设计计算 (34)第5章液压泵的确定 (36)5.1 液压泵的主要技术参数 (36)5.1.1 主要技术参数 (36)5.1.2 各种泵的比较 (36)5.2 液压泵的确定 (37)5.3 油箱的选择 (39)第6章支腿液压回路简介 (40)总结 (41)后记 (42)参考文献 (43)前言高空作业车和起重机都广泛应用在船舶、建筑、市政建设、消防、港口等行业,有着广阔的发展前景。
高空作业车系统及常见故障分析

高空作业车系统及常见故障分析作者:张程杰来源:《中国科技博览》2016年第07期[摘要]高空作业车应用越来越普遍,本文主要阐述高空作业车的基本结构、液压系统和电气系统以及实际应用中常见故障分析、排除。
[关键词]高空作业车液压系统电气系统故障分析中图分类号:O856 文献标识码:A 文章编号:1009-914X(2016)07-0061-011.高空作业车种类及基本组成高空作业车(以下检车高空车)分为折叠臂式、伸缩臂式、混合臂式和垂直升降式四种基本形式。
高空车主要由底盘、举升臂、工作平台、回转机构、动力系统、液压系统和电气系统等部分组成,其工作原理是发动机通过安装在变速箱上的取力器将动力传递给液压油泵,液压油泵产生高压液压油通过控制阀分别输送给各油缸或液压马达,从而实现各工作机构的运动。
以折叠臂式高空车为例,对各部分做简要介绍。
1.1 举升臂举升臂包括上臂、下臂和小臂。
行驶状态时,上下臂折叠在一起,小臂垂直向下。
进行高空作业时,上、下、小臂分别由变幅油缸举升伸展至一定角度,将工作人员送至工作位置。
工作臂为钢板焊接而成的箱型结构,臂和臂之间、下臂和转台铰接处均设有专门的滑动轴承,保证工作臂转动阻力小,运动平稳。
1.2 工作平台工作平台为钢架焊接框架结构,周围设有护栏,右侧护栏开有侧门,方便人员进出,平台底板采用防滑花纹铝板,平台周圈下部设有护栏,防止工具或其他物品掉落。
1.3 回转结构回转机构由液压马达、回转减速器以及小齿轮、回转支承等组成。
进行回转时,液压马达输出动力,通过回转减速器减速后带动输出轴上的小齿轮旋转,小齿轮与回转支承的齿轮啮合,由于回转支承的齿圈与车架刚性连接,因而回转减速器带动与之相连的转台回转。
1.4 动力系统高空车动力源为底盘发动机,其动力由取力器从底盘变速箱取出。
取力器和变速箱取力齿轮处于断开状态,当进行高空作业时,操作拉杆使取力器的滑移齿轮与变速箱的输出取力齿轮啮合,取力器输出轴带动油泵工作,从而将发动机的机械能转为液压能,为系统提供动力。
曲臂式高空作业车的操作技术与故障排除
曲臂式高空作业车的操作技术与故障排除曲臂式高空作业车是一种广泛应用于建筑、维修、清洁等高空作业领域的特种设备。
本文档将详细介绍曲臂式高空作业车的操作技术及故障排除方法,以帮助操作人员更好地掌握车辆的使用和维护。
一、曲臂式高空作业车的基本结构曲臂式高空作业车主要由以下几部分组成:1. 底盘:提供车辆的行驶动力和稳定性。
2. 工作平台:供操作人员进行高空作业的场所。
3. 曲臂机构:实现工作平台在不同高度和角度的调整。
4. 液压系统:为曲臂机构和工作平台提供动力。
5. 电气系统:控制整车的运行和操作。
6. 安全防护装置:确保作业过程中的安全。
二、曲臂式高空作业车的操作技术1. 启动与熄火- 确保车辆停放在水平地面,踩下刹车踏板,拉紧手刹。
- 将钥匙插入点火开关,旋转至启动位置,等待发动机启动。
- 启动成功后,将钥匙旋转至运行位置。
- 操作完成后,将钥匙旋转至熄火位置,等待发动机完全停止后拔出钥匙。
2. 工作平台的操作- 确保工作平台在最低位置,曲臂机构完全收回。
- 按下工作平台上升按钮,缓慢调整工作平台至所需高度。
- 根据需要调整曲臂机构的角度,使工作平台达到理想位置。
- 操作完成后,将工作平台降至最低位置,曲臂机构完全收回。
3. 液压系统的操作- 确保车辆电源已开启,按下液压系统启动按钮。
- 缓慢调整油门踏板,根据需要调整液压系统的压力。
- 操作完成后,关闭液压系统启动按钮,停止油门踏板调整。
4. 安全防护装置的操作- 在操作过程中,确保安全带佩戴正确,防止意外坠落。
- 定期检查车辆的各项安全防护装置,确保其正常运行。
三、曲臂式高空作业车的故障排除1. 发动机无法启动- 检查电源是否连接正常,电池电量是否充足。
- 检查点火系统是否正常,如火花塞、点火线圈等。
- 检查燃油系统是否正常,如燃油泵、燃油滤清器等。
2. 工作平台无法上升或下降- 检查液压油路是否正常,如有无堵塞、泄漏等情况。
- 检查液压泵、马达是否正常工作。
高空作业车操作规程及方法

高空作业车操作规程及方法一、高空作业车手的动操作1、选择高空作业车作业位置后注意地面不实、暗沟等可能造成的高空作业车失重,严格禁止未支撑高空作业车的情况下进行升高作业;下车组合操纵阀,主要用于高空作业车起重的支腿操作根据主油路的确定,可以用起重机的支腿回路中,起重机需工作时,首选操作下车组合操纵阀,使支腿伸出。
当阀杆向里换向时,流体进入标牌所示相对的阀口分别调节任一个支腿的伸出;当阀杆向外换向时,分别调节任意一个支腿的缩回;当支腿升到一定高度并调平高空作业车的情况下(每个支腿可单独调平),操作阀设置换向杆向里推(弹簧钢球定位)压力油经过换向阀径口进入上车组合操作阀。
2、高空作业车上车组合操作阀设有双向操作(转臂座椅操作台一个和吊篮操作台一个)按操作牌所示进行升高操作。
3、需要在吊篮操作,必须打开转臂操作阀左端换向阀杆(向里推,弹簧定位)使流体通过阀体进入吊篮操作阀来完成吊篮标牌所示的操作程序。
4、手动操作换向阀可根据手感及力度,阀杆的行程控制升降臂的速度,平稳,根据操作人员的操作技术可更有效的发挥高空作业车的升降速度及平稳度。
5、本系列高空作业车可分手动操作和电动操作两种(上车操作阀),根据不同的情况选择操作方法。
6、工作完毕高空作业车各升降臂必须收回至行驶状态(各臂进入支架),方可快速行驶。
7、环境温度-20~40度,风力不超过六级,工作环境不带有暗沟、空洞、地面不结实,工作车架处于水平状态。
8、工作高度及半径因不同车型而定,回转角度360度,支腿设置横向(增加支撑跨度)和纵向H型支撑,工作上限载200公斤,限两人作业。
9、取力器位于发动机变速箱侧,有离合操作手柄或者电磁阀开关控制取力器的工作和停止,由发动机输出动力通过取力器转动使液压油泵工作。
10、回转机构由液压马达、回转减速器及回转支承组成,由液压马达驱动减速器输出小齿轮带动回转支承回转。
11、中心回转接头安装在转台中心处,实现回转中流体及电能在回转的过程中正常传递。
自行走高空作业车电子液压控制系统

TECNORD自走行高空作业平台电液控制系统 英德康自动化是 美国DELTA POWER-TECNORD公司在中国的总代理,从事各种高空作业平台的全套电液控制系统的总体设计、部件进口配套、售前、售后服务。
意大利TECNORD提供的臂架自走行高空作业平台车电液控制系统,含电液比例控制流量控制,行走、转向控制,工作机构控制、支腿控制、工作斗平衡控制、整车双轴向平衡控制、整车电气控制系统、安全报警系统。
各种规格,可适应20米-40米高度伸缩臂架自走行高空作业平台车最大调节流量:20L/min(4G型),电源电压:24VDC,过滤:25微米最大调节流量:40L/min(8G型),电源电压:24VDC,过滤:25微米电气控制系统包括:n工作斗拖缆遥控系统,n下车操作柜及拖缆遥控控制系统,n工作斗倾斜自平衡控制系统,电液比例控制系统包括n下车集成阀块 ,含电液比例控制系统,电液行走快慢控制,电液转向控制,变幅与自平衡同步控制。
n下车阀块1B(走行前进/后退):前进/后退的控制及快/慢速控制—快速(走行变量泵串联控制)、慢速(走行变量泵并联控制),拖车作业时,手动释放制动器的控制。
n下车支腿集成阀块:该阀块包括四对电磁换向阀(含手动强制控制),控制四个支腿的伸出和折回。
n上车集成阀块:该阀块包括三对电磁换向阀(含手动牵制控制),用来控制变幅油缸的升降,伸缩臂的伸出、缩进,回转马达的左右旋转。
n工作斗集成阀块,含倾斜平衡控制系统、工作斗旋转系统。
n断电应急控制阀块5(与手动泵同时使用)一,电气控制系统:1,工作斗控制系统 工作斗控制由PCD/L1S拖缆式遥控系统和倾斜自平衡控制柜上的组合控制开关组成。
PCD/L1S线控遥控系统适用于电液比例流量阀和电磁换向阀(2 – 8个功能)的组合配置,专用于各种高空作业车。
工作篮与微机控制柜的连接:采用串行数据接口。
2. 下车操作柜及控制系统:下车控制柜:下车控制柜的控制系统为16位可编程微处理器,具备移动工程机械所需要的各种输入/输出信号。
江铃15米三节臂高空作业车改装设计(液压、支腿系统)-开题报告

型运输类车辆如自卸车将会随着国民经济的深入发展而逐渐减少。 由于国内专用汽车生产企业较
多,市场总需求量有限等原因,为满足市场竞争的需要,近几年多数企业根据市场需要注重新产
品开发力度,产品范围基本涉及到国民经济的各个环节。
但是目前,国产专用车从技术角度而言,虽经过十多年的苦练内功与摔打磨练,不断地汲取
毕业设计(论文)开题报告
学生姓名
系部
汽车工程系
专业、班级
指导教师姓名
职称
教授
从事 专业
车辆工程 交通工程
是否外聘 □是□√ 否
题目名称
江铃 15 米三节臂高空作业车改装设计(液压支腿系统)
一、课题研究现状、选题目的和意义
高空作业车是指 3 米以上,由液压或电动系统支配多支液压缸,能够上下举升进行作业的一
由于专用汽车是一种在许多特征不同于本型汽车或经过特殊改装之后才用于运输的,而我国 专用汽车的品种还比较单一、生产规模小、数量还远远不能满足国民经济发展的需要。因此,不 断开发新产品,增加产品和品种,提高产品质量是摆在专用汽车厂家一项迫切且艰巨的任务。 二、设计(论文)的基本内容、拟解决的主要问题
用汽车上得到了广泛应用,在一定程度上满足了新形势下用户对专用车产品的多样化需求。在专
用车在功能、结构、外观上进行科学、合理的设计,注重个性化和人性化设计。栏板起重运输车
因其在商业运输行业中突出的优越性,正在国外发达国家的邮政、商业等行业中占据了巨大的市
场和竞争力。
随着我国经济的飞速发展展以及国内大量基础设施建设需要等因素,专用汽车产品结构随国
内市场需求格局较过去有很大变化,重型车和轻型车比例处于增长趋势,中型车比例继续下降;
体现专用汽车产品专用功能特性的产品在总量中的比重加大;专用汽车品种数得到大幅增加;整
高空作业车吊篮调平原理

高空作业车吊篮调平原理
高空作业车的吊篮调平原理是指通过一系列机械或电动装置来调整吊篮的水平状态,以确保在高空作业过程中工作人员的安全和工作效率。
吊篮调平原理通常包括以下几个方面:
1. 悬挂系统,高空作业车的吊篮通常采用液压系统或电动系统来实现调平。
液压系统通过控制液压缸的伸缩来调整吊篮的倾斜状态,而电动系统则通过电动机驱动齿轮或蜗杆装置来实现调平。
2. 控制系统,吊篮调平通常由操作员通过控制台或遥控器来实现。
操作员可以通过控制按钮或摇杆来调整吊篮的倾斜角度,以保持水平状态。
3. 传感器,为了确保吊篮的稳定性和安全性,通常会在吊篮上安装倾斜传感器或称重传感器。
这些传感器可以实时监测吊篮的倾斜角度和载荷情况,并将数据反馈给控制系统,从而实现自动调平或者提醒操作员进行调整。
4. 安全保护装置,为了防止意外情况发生,吊篮调平系统通常会配备紧急停止按钮、过载保护装置等安全保护装置,一旦发生异
常情况,系统可以及时停止工作,保障工作人员的安全。
总的来说,高空作业车吊篮调平原理是通过悬挂系统、控制系统、传感器和安全保护装置等多种装置的协同作用,来实现吊篮在高空作业过程中的稳定和安全。
这些装置能够保证吊篮在不同工作环境下的平稳运行,提高工作效率,同时也保障工作人员的安全。
高空作业车调平机构液压系统仿真研究
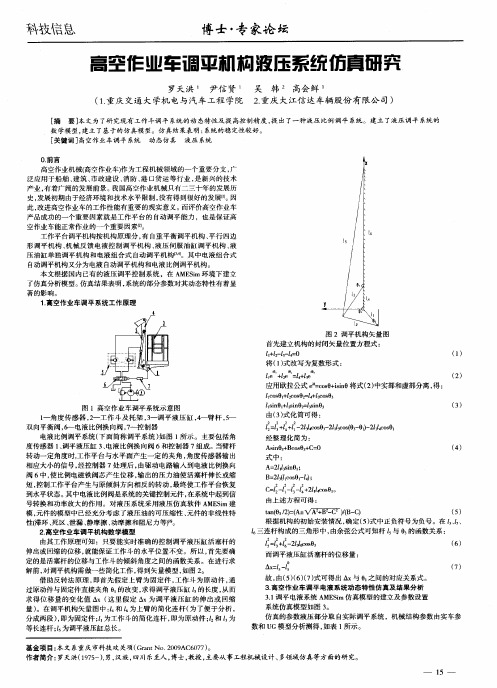
图 2 调 平 机 构矢 量 图 首先建立机构 的封闭矢量位置方程式 :
Z ZZ 厶0 l2 3 = + 一一 () 1
将( ) 1式改写为复数形式 :
Z i+ l0 Z e,
2 厶f ’ e + :
() 2
应用欧拉公式 e c 0 in 将式( ) i o +s 0  ̄ s i - 2 中实部和虚部分离 , : 得
l i 0 l i0 1 i 0  ̄n l zn  ̄ 3n 3 s +s =s
() 3
由( ) 3 式化简可得 : Z +4 f 23 o0- 1 ̄o(30 - /4 sl 2 2+1 14 s32l s - 1 21c 0 : - / c l 0 ) /o c 经整理化简为 : A i0+ cs3c O s 3B o0+ = n 式中 :
A= / 3i 0 ; 2 l sn l 1
() 4
B 231 s rf; = /f o0-4 (c )
C= 2 l 3 l +2 l c s l /-l-l- 4 1 4o 0 。 /
由 上述 方程 可得 :
tn0 /)(± A2B一 )B C a(32=A 、/ + c , — ) (
/ o0+zoO-4 l o0 1 s l l s z 1+ 3 s 3 c c c
图 1高空作业车调平系统 示意图 1 角度传感器 , 工作斗及 托架 ,一调平 液压缸 , 臂杆 ,一 一 2 一 3 4 一 5 双 向 平 衡 阀 ,一 电液 比例 换 向阀 ,一 控 制 器 6 7 电液比例调平系统 ( 下面简称调平 系统 ) 如图 l 所示。主要包括角 度传感器 1调平液压缸 3 电液 比例换向阀 6和控制器 7组成 。当臂杆 、 、 转动一定角度时, 工作平 台与水平面产 生一定 的夹角 , 角度传 感器输 出 相应大小 的信号 , 经控制器 7处理后 , 由驱动电路输入到电液 比例换 向 阀 6 使 比例 电磁铁阀芯产生位移 , 出的压力油使活塞杆伸长或缩 中, 输 短, 控制工作平 台产生与原倾斜方 向相反 的转 动 , 最终使工作平台恢复 到水平状态 。 中电液 比例阀是系统的关键 控制元件 , 其 在系统 中起到信 号转 换 和功 率 放 大 的作 用 。对 液 压 系 统 采 用 液 压 仿 真 软 件 A Sm 建 ME i 模, 元件 的模 型 中 已经 充 分 考 虑 了液 压 油 的 可 压缩 性 、 件 的 非 线 性 特 元 性( 滞环、 区、 死 泄漏 、 静摩擦 、 动摩擦和阻尼力等) 。 2高空作业车调 平机构数 学模型 . 由其工作原理可知 :只要能实时准确 的控制 调平 液压缸活塞杆的 伸出或 回缩 的位移 , 就能保证工作斗的水平位置不变 。所 以 , 首先要确 定的是活塞杆的位移与工作斗的倾斜角度之 间的函数关 系。在进行求 解前 , 对调平机构需做一些简化工作 , 到矢量模 型, 图 2 得 如 。 借助反 转法原理 , 即首先 假定上臂 为固定件 , 工作斗 为原动件 , 通 过原动件与 固定件直接夹 角 0 的改变 , . 求得调平液压缸 f的长度 , 从而 求得位移 量的变化 值 △x( 里假定 △ 这 x为调平 液压缸 的伸 出或 回缩 量) 。在调平机构矢量 图中 : 和 f为上臂 的简化 连杆 ( 了便于分 析 , f 6 为 分成两段 ) 即为固定件 ; 为工作斗的简化连杆 , , z , 即为原动件 ; 和 如为 Z :
基于AMESim的高空作业臂举升液压系统建模与仿真
基于AMESim的高空作业臂举升液压系统建模与仿真李向良【摘要】介绍了高空作业车臂架举升液压系统的组成与工作原理,针对举升液压缸因负载变化运行不稳的问题,利用AMESim软件建立举升系统的仿真模型,采用压力补偿技术对液压系统进行优化,仿真分析了有压力补偿和无压力补偿情况下的系统动态曲线,结果表明,采用压力补偿技术能有效保障液压缸的平稳运行.%The paper introduces the composition and working principle of lifting hydraulic system with aerial working arm. To solve the problem of unstable operation of lifting hydraulic cylinder due to changes in load, simulation model of the lifting system is established by using AMESim software. Pressure compensation technology is used to optimize the hydraulic system, and simulation analysis is conducted on its dynamic curves with and without pressure compensation. The results show that the pressure compensation technology can effectively guarantee smooth operation of hydraulic cylinder.【期刊名称】《起重运输机械》【年(卷),期】2017(000)010【总页数】3页(P113-115)【关键词】高空作业车臂架;举升液压系统;AMESim;建模仿真【作者】李向良【作者单位】河北工程大学机械与装备工程学院邯郸 056038【正文语种】中文【中图分类】TH137高空作业车是一种常见的工程机械装备,随着现代工业的发展,越来越多地应用在各个行业中。
高空作业车工作原理
高空作业车工作原理
高空作业车是一种用于进行高空工作的移动设备,如修建建筑、维修电线、清洁窗户等。
其主要工作原理是通过伸缩臂、升降系统和旋转平台等组件来实现高空作业的灵活性和安全性。
以下是高空作业车的基本工作原理:
1.伸缩臂:高空作业车通常配备伸缩臂,通过液压系统实现
伸缩功能。
伸缩臂可根据工作需求伸长或收缩,从而调整
工作位置和范围。
2.升降系统:高空作业车上的升降系统可以实现平台的垂直
升降。
通常采用液压或电动机驱动升降柱或伸缩臂,使操
作平台上升或下降到所需的高度。
3.旋转平台:高空作业车的上部通常配备一个能够旋转的平
台,使操作员能够在水平方向上调整工作位置。
旋转平台
可通过液压或电动机驱动,使操作平台在360度范围内旋
转。
4.安全措施:高空作业车通常配备多项安全措施,包括限位
开关、安全传感器和护栏等,以确保操作员和周围人员的
安全。
此外,高空作业车还配备紧急停止装置和防倾翻装
置等安全设备。
5.控制系统:高空作业车的控制系统用于控制伸缩臂、升降
系统和旋转平台等功能。
操作员通过操纵台或遥控器来控
制高空作业车的各项功能。
高空作业车的工作原理使得它可以在高空环境中灵活、安全地进行作业。
它广泛应用于建筑、维护、清洁等行业,提供高效、便捷的高空工作解决方案。
高空作业车液压系统设计
GKZ高空作业车液压系统设计徐州师范大学开题报告及工作实施计划院系专业年级、班级姓名指导教师开题报告日期一、毕业设计(论文)开题报告二、毕业设计(论文)工作实施计划(一)毕业设计(论文)的理论分析与软硬件要求及其应达到的(二)毕业设计(论文)工作进度与安排三、对开题报告的审阅意见(论文)立题卡(理工类)院(系)专业班级说明:(1)空格内打"√"或填上数字等负责指导教师日期(2)本卡一式3份,指导教师、院(系)和教务科各一份教研室主任日期教学院长日期目录摘要 (1)Abstract (2)前言 (3)第1章绪论 (4)1.1 高空作业车的发展状况 (4)1.2 课题的来源和意义 (4)1.3 基本参数及主要技术性能指标 (5)第2章液压系统设计 (8)2.1 液压系统的构成 (8)2.2 液压系统设计概述 (8)2.3 设计依据 (8)2.4 主要机构简述 (9)2.5 主要工作机构液压回路设计 (10)2.5.1 高空作业车起升机构的液压回路设计 (10)2.5.2 高空作业车吊臂伸缩机构液压回路设计 (12)2.5.3 高空作业车回转机构液压回路 (12)2.5.4 高空作业车变幅机构液压回路设计 (13)2.6 整体液压回路设计 (14)第3章高空作业部分液压系统的设计计算 (18)3.1 上臂油缸的设计 (18)3.1.1 确定液压缸类型和安装方式 (18)3.1.2 确定液压缸的主要性能参数和主要尺寸 (18)3.2 下臂油缸的设计计算 (23)3.2.1 确定液压缸类型和安装方式 (23)3.2.2 确定液压缸的主要性能参数和主要尺寸 (23)3.3 回转机构液压马达设计 (28)3.3.1 转矩计算 (28)第4章起重机构的液压部分设计 (31)4.1 伸缩机构液压缸设计 (31)4.1.1 确定液压缸类型和安装方式 (31)4.1.2 确定伸缩液压缸的主要性能参数和主要尺寸 (31)4.2 起升机构液压马达设计计算 (34)第5章液压泵的确定 (36)5.1 液压泵的主要技术参数 (36)5.1.1 主要技术参数 (36)5.1.2 各种泵的比较 (36)5.2 液压泵的确定 (37)5.3 油箱的选择 (39)第6章支腿液压回路简介 (40)总结 (41)后记 (42)参考文献 (43)摘要高空作业车是将高空作业人员和必要的工具送至空中,并提供工作人员空中作业场所的机械。
直臂式高空作业车工作原理
直臂式高空作业车工作原理直臂式高空作业车,这名字听起来有点复杂,但其实它的工作原理简单得很,就像你平时用梯子上天花板一样。
不过,这个车可不是普通的梯子,它有着自己的“小秘密”。
想象一下,一个巨大的机械手臂,像超级英雄一样伸展到高空,帮助我们完成那些看似遥不可及的任务。
无论是清理高楼的窗户,还是修理高空的灯光,这小家伙都能轻松搞定,真是让人心服口服啊。
说到直臂式高空作业车的构造,别小看它,看上去可能就像一辆普通的叉车,但里面可有乾坤。
这种车的“头”就是一根长长的臂,仿佛在向天祈祷。
这个臂的设计可是经过精心计算的,能够伸展到让人咋舌的高度。
使用的时候,操作员坐在驾驶室里,操控着这个臂,就像玩游戏一样。
左一下,右一下,哎呀,真是妙不可言,简直就是“指点江山”啊!说到操作,跟开车差不多,得小心翼翼,不然一不小心就可能“翻船”了。
再来说说它的工作原理。
这个高空作业车的动力来源于强大的液压系统。
液压系统就像是一种神奇的魔法,通过油液的压力,推动这个臂在空中舞动。
只需轻轻一按按钮,油液就开始流动,臂就能迅速升降。
有没有觉得像在看魔术表演?这速度快得让人眼花缭乱,几乎就是“飞天遁地”了。
要知道,液压系统可是高空作业车的心脏,没了它,这车也就变成了个“摆设”,没啥用。
直臂式高空作业车的安全性也是非常重要的。
毕竟,高空作业可不是开玩笑的,搞不好就有“掉链子”的风险。
车身上配备了多种安全装置,比如稳定支腿,像蜘蛛一样稳稳地撑住车身,确保在高处作业时不摇晃。
驾驶员在操作之前,还得检查一遍这些装置,确保万无一失,真是细致入微呢!如果没有这些安全措施,那就真是“如履薄冰”了,大家可不想在高空中来一场“惊险大片”。
再说了,操作这个高空作业车也是需要一定的技巧的。
并不是随便一个人就能上去开。
驾驶员得经过专业培训,才能熟练掌握各种操作手法。
就像学骑自行车一样,起初可能有点磕磕碰碰,但只要练习得当,最后就能像风一样自在。
想象一下,驾驶员在高空中,手握操纵杆,俯瞰大地,那种感觉简直不能更酷了,恍若自己是“天上飞”的神仙。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计论文任务书一、题目及专题:1、题目高空作业的液压系统设计2、专题液压系统设计二、课题来源及选题依据①在大学课程中学习过液压,理论结合实际;②高空作业车是用来运送工作人员和工作装备到指定高度进行作业的特种车辆,是将高空作业装置安装在汽车底盘上组成的。
高空作业装置包括工作臂、回转平台、副车架、工作斗、液压系统和操纵装置等。
现在的高空作业装置具有操作平顺、工作稳定、自动调速、安全可靠等优点,大大提高了空中作业的工作效率。
三、本设计应达到的要求:本毕业设计要求设计一辆11米高空作业车,其具体要求如下:①设计任务:高空作业车的液压系统设计②机器用途:通用型,适用于建筑、安装、管道铺设等高空作业。
③工作环境:风力六级以下,温度-20~30 ℃,无腐蚀性极易爆易燃性气体。
④作业部分主要技术参数最大作业高度:11-12米;最大作业半径: 5.5米;回转角度:360°;额定平台载荷:200kg;操作方式:下操作、上操作可以任意选择;支腿形式/数量:H型/4;旋转速度:0-3r/min;两支臂变幅时间:起臂:t≤70s;落臂:t≤6045s;支腿收放时间:收支腿:t≤60s;放支腿:t≤60s。
四、接受任务学生:五、开始及完成日期:自2012年11月20日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长研究所所长〕签名系主任签名2012年11月20日摘要高空作业车是用来运送工作人员和工作装备到指定高度进行作业的特种车辆,是将高空作业装置安装在汽车底盘上组成的。
高空作业装置包括工作臂、回转平台、副车架、工作斗、液压系统和操纵装置等。
现在的高空作业装置具有操作平顺、工作稳定、自动调速、安全可靠等优点,大大提高了空中作业的工作效率。
高空作业车是利用汽车底盘作为行走机构,具有汽车的行驶通过性能,机动灵活,行驶速度高,可快速转移,转移到作业场地后能迅速投入工作,因此被越来越多的应用在工程建设、工业安装、设备检修、物业管理、航空、船舶、石化、电力、影视、市政、园林等许多行业,是近几年来国内发展最快的专用汽车产品之。
关键词:高空作业车;液压系统;泵站ABSTRACTAerial word truck is used to transport personnel and equipment to the designated special vehicle height work, is the aerial device installed in the automobile chassis. Aerial device comprises a working arm, rotating platform, side frame, basket, hydraulic system and control device. Aerial device now has the advantages that the operation is smooth, stable operation, automatic control, safe and reliable, greatly improving the working efficiency of the air. Aerial vehicle is the automobile chassis as a running mechanism, has the vehicle performance, flexible, high speed, fast transfer, transfer to the job site to work quickly, so it is more and more used in many industry construction, industrial installation, equipment maintenance, property management, aviation, ships, petrochemical, electricity, television, municipal, gardens, is one of the most rapid development in recent years of dedicated automotive products.Keywords : operating vehicle height ; hydraulic system ; Pump stations目录摘要........................................................................................................... 错误!未定义书签。
Abstract ......................................................................................................... 错误!未定义书签。
目录........................................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 引言 (1)1.2 高空作业车的发展概况 (2)1.2.1 概况 (2)1.2.2 国外趋势与动向 (3)1.3 国内现状、差距与如何提高的方法 (4)1.3.1 现状 (4)1.3.2 差距 (4)1.4 液压传动概况 (5)1.4.1 液压传动的定义 (5)1.4.2 液压传动的发展概况 (5)1.4.3 液压传动系统的组成 (5)1.4.4 液压传动的优缺点 (6)1.4.5 液压系统的设计步骤与设计要求 (6)1.5 课题简介 (9)1.5.1选题的必要性 (9)1.5.2 课题主要研究的内容及目的 (10)2 设计要求 (10)2.1 总体设计要求 (10)2.2 动作要求 (11)2.3 技术性能要求 (11)3 确定设计方案 (11)3.1 总体设计方案 (11)3.2 确定执行元件的形式 (12)3.3 液压系统的设计步骤 (12)3.4 整体设计结构图 (12)3.5 液压系统 (13)3.5.1 液压系统工作原理 (14)3.5.2 液压系统原理图 (15)4 液压系统计算 (16)4.1 液压缸的设计计算 (16)4.1.1 液压缸的最大载荷 (16)4.1.2 确定系统工作压力 (21)4.1.3 液压缸的内径计算 (21)4.1.4 液压缸缸筒壁厚和外径计算 (21)4.1.5 液压缸活塞杆直径 (23)4.1.6 液压缸活塞杆强度校核 (24)4.1.7 液压缸活塞杆稳定性校核 (25)4.1.8 液压缸的工作压力 (26)4.1.9 液压缸的流量 (27)4.1.10 液压缸选择 (28)4.2 液压泵的选择 (28)4.2.1 计算液压泵的流量 (28)4.2.2 计算液压泵的压力 (29)4.2.3 选择液压泵 (29)4.3 电动机的选择 (30)4.4 管路的选择 (31)4.5 其他辅助元件的选择 (31)4.5.1 虑油器 (31)4.5.3 油箱 (33)5 阀板的设计 (34)5.1 阀的集成形式 (34)5.1.1 有管集成 (34)5.1.2 无管集成 (35)5.2 无管集成液压控制装置的设计流程 (35)5.3阀块的设计 (36)5.3.1 整体设计方案 (36)5.3.2 阀块的设计 (36)6 泵站设计 (42)6.1 泵站概述 (42)6.2 泵站设计目的 (42)6.3 泵站的连接和安装方式 (42)6.3.1 液压泵的安装方式 (42)6.3.2 电动机与液压泵的连接方式 (43)6.4 防震降噪措施 (43)7 结论与展望 (44)7.1结论 (44)7.2展望 (44)致谢 (44)参考文献 (44)1 绪论1.1 引言高空作业车是用来运送工作人员和工作装备到指定高度进行作业的特种车辆,是将高空作业装置安装在汽车底盘上组成的。
高空作业装置包括工作臂、回转平台、副车架、工作斗、液压系统和操纵装置等。
现在的高空作业装置具有操作平顺、工作稳定、自动调速、安全可靠等优点,大大提高了空中作业的工作效率。
高空作业车是利用汽车底盘作为行走机构,具有汽车的行驶通过性能,机动灵活,行驶速度高,可快速转移,转移到作业场地后能迅速投入工作,因此被越来越多的应用在工程建设、工业安装、设备检修、物业管理、航空、船舶、石化、电力、影视、市政、园林等许多行业,是近几年来国内发展最快的专用汽车产品之一。
高空作业车按工作臂的型式,有四种基本型式,分别为:垂直升降式、折叠臂式、伸缩臂式和混合臂式。
垂直升降式高空作业车的升降机构只能在垂直方向上进行运动。
它的主要特点是结构简单,承载能力强,但作业范围小,作业高度低,这种结构型式应用比较少。
折叠臂式高空作业车工作臂之间的连接全部采用铰接型式,所以国外又把它叫做铰接式高空作业车。
折叠臂高空作业车结构适合于较低作业高度的车型,如要加大作业高度,必然要增加臂长或增加工作臂数量,增加臂长会使作业车体积庞大,降低灵活性;增加工作臂数量会造成操作繁琐,安全性降低。
伸缩臂式的高空作业车在行驶状态时,工作臂缩回套叠,工作时伸出,可以有效增大作业高度,同时具有工作效率高、操作简单、动作平稳等特点。
混合臂式高空作业车工作臂之间既有铰接,也有伸缩,是折叠臂式和伸缩臂式高空作业车的结合,它综合了两种结构型式的优点,工作性能最好,但结构也最为复杂。
1.2 高空作业车的发展概况1.2.1 概况高空作业机械是在工程起重机械基础上发展起来的产业系统,只有二十几年的历史。
尽管我国在高空作业车设计制造上取得了一些成绩,但是国内生产制造的高空作业机械同国外同类型高空作业机械产品相比仍有一定差,主要表现为技术含量低、大型的较少、结构笨重、作业时微动性能差等问题。
高空作业车在世界上已有近四十年的发展历史,现已形成一个完整的专用产品研发、生产体系。
如美国的CROVE(格洛夫)、GENIE(吉尼)、英国的COLES (西蒙),意大利的RICO (利高),芬兰的BRONTO(布朗托)公司等,并且它们各有侧重,如BRONTO侧重于高空消防车系列,COLES侧重于车载高空作业平台等。
高空作业车发展到现在,其作业高度最高已到达72m(BRONTO公司生产),作业车的可靠性、安全性、舒适性、操作方便和简单的直接性等方面都有较大提高,而且随着电子计算机的普及和发展以及机、电、液一体化研究的进展,国外各大公司竞相采用电脑(电子)操控系统,提高整机性能,减少整机液压元件的使用,减小整机体积及重量,提高操控的灵敏度。