激光雷达智能驱动电路
基于UCC27322的中功率半导体激光器驱动电路设计(精)
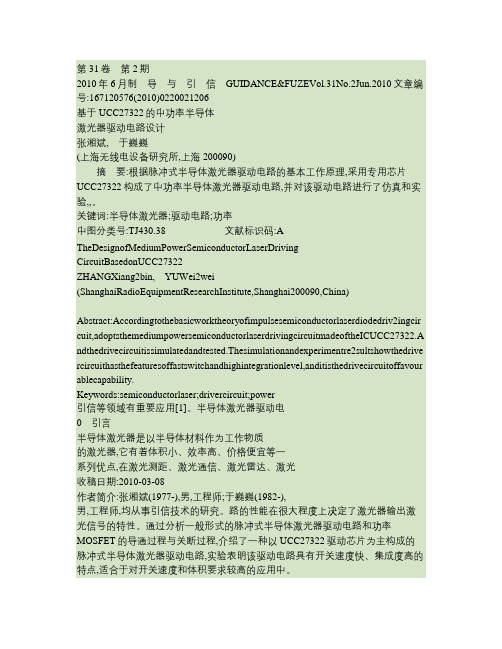
图1典型脉冲式半导体激光器驱动电路的结构形式
当没有触发信号时,开关电路处于断开状态,
电源经充电回路给储能电路充电;当触发信号到来时,开关电路迅速导通,储能电路通过激光器、开关电路放电,形成脉冲电流驱动激光器发光。图2所示为典型脉冲式半导体激光器驱动电路的等效电路[2]
。
图2典型脉冲式半导体激光器驱动电路的等效电路
R3放电,形成电流脉冲。开关S1导通瞬间,电路形成一个零输入响应RLC放电回路。放电开始瞬间,放电回路电流为零,根据理论分析可以忽略电阻R2和电容C2的影响[2],电路电压全部加到电感上,设电压初始值为V,回路中电流i(t)可以表示为
i(t)=Ae-αt
sinωt(1)其中:
A=
Vα=R3
ω=R3L1
22
制 导 与 引 信 第31卷
1半导体激光器驱动电路理论分析
1.1驱动电路等效电路
按照工作方式分类,半导体激光器可以分为连续和脉冲两大类。对于不同的工作方式,半导
体激光器驱动电路也有所不同。其中,脉冲式半导体激光器采用脉冲信号来驱动,要求驱动电路提供快速电流脉冲,并且脉冲前后沿越陡越好。在本质上脉冲式半导体激光器驱动电路是一种大电流开关电路,主要由电源、储能电路、激光器等效电路、开关电路和取样电路等组成。图1所示为典型脉冲式半导体激光器驱动电路的一般结构形式[2]
关键词:半导体激光器;驱动电路;功率
中图分类号:TJ430.38文献标识码:A
TheDesignofMediumPowerSemiconductorLaserDriving
CircuitBasedonUCC27322
ZHANGXiang2bin,YUWei2wei
(ShanghaiRadioEquipmentResearchInstitute,Shanghai200090,China)
激光二极管驱动电路保护电路原理-概述说明以及解释

激光二极管驱动电路保护电路原理-概述说明以及解释1. 引言1.1 概述概述激光二极管驱动电路保护电路是在激光二极管的工作过程中起到保护作用的重要组成部分。
激光二极管作为一种高精度、高效率的光电器件,在许多领域都有广泛应用,例如激光切割、激光打印、激光雷达等等。
然而,激光二极管在高功率、高电流工作状态下容易受到瞬态过电压、过电流以及温度过高等因素的影响,从而导致损坏或性能下降。
因此,为了保障激光二极管的正常工作和延长其使用寿命,需要使用特定的保护电路来进行保护。
本文将从激光二极管驱动电路的工作原理和保护电路的作用两个方面进行探讨。
首先,我们将介绍激光二极管驱动电路的基本原理,包括电流调节、电压补偿、反馈控制等关键技术。
然后,我们将详细讨论保护电路在激光二极管工作过程中的作用,包括过电压保护、过电流保护以及温度保护等方面。
通过对激光二极管驱动电路保护电路原理的深入研究,我们可以更好地了解激光二极管的工作机制以及常见的故障原因。
同时,通过合理设计和使用保护电路,可以有效提高激光二极管的稳定性和可靠性,延长其使用寿命,同时提高系统的整体性能。
在接下来的章节中,我们将详细介绍激光二极管驱动电路的工作原理和保护电路的作用,并对其应用前景进行展望。
通过对这些内容的学习和研究,我们可以更加深入地了解激光二极管驱动电路保护电路原理,为激光二极管的应用和发展提供有力支持。
1.2 文章结构文章结构部分的内容可以描述本篇长文的组织结构和章节安排。
具体内容如下:2. 文章结构本篇文章主要分为三个部分:引言、正文和结论。
引言部分:引言部分主要对激光二极管驱动电路保护电路原理进行概述,简要介绍激光二极管驱动电路的工作原理以及保护电路的作用。
通过引入这个主题,读者可以了解到激光二极管驱动电路和保护电路的基本知识,并对本文的内容有一个整体的了解。
正文部分:正文部分主要包括两个章节,分别介绍激光二极管驱动电路的工作原理和保护电路的作用。
ttl调制激光驱动电路
ttl调制激光驱动电路
TTL调制激光驱动电路,是一种基于TTL(Transistor-Transistor Logic,晶体管-晶体管逻辑)信号来调制激光器输出的电路。
这种电路常用于光通信、激光雷达和激光显示等领域。
TTL调制激光驱动电路的基本原理是利用TTL信号的高低电
平来控制激光器的输出光强。
一般来说,TTL调制激光驱动
器的电路由四部分组成:TTL信号输入、驱动电路、电流源
和激光器组成。
具体来说,TTL信号经过驱动电路进行放大和调制,然后送
入电流源,电流源将调制后的信号转化为电流信号。
最后,电流信号通过电流源的控制,驱动激光器的工作状态,实现对激光器光强的控制。
在实际应用中,TTL调制激光驱动电路通常还配备了保护电路,以保证激光器的安全工作。
此外,还可以根据具体的应用需求,设计相应的电路功能模块,例如温度控制、反馈控制等。
总的来说,TTL调制激光驱动电路通过TTL信号控制激光器
的工作状态,实现对激光器输出光强的调制。
这种电路具有简单、可靠、成本低等优点,广泛应用于各种激光器驱动和调制应用中。
mems激光雷达结构

mems激光雷达结构
MEMS激光雷达的结构主要包括机械式激光雷达和混合式激光雷达(MEMS)。
机械式激光雷达通过机械旋转实现激光扫描。
其激光发射部件在竖直方向上排布成激光光源线阵,可通过透镜在竖直面内产生不同指向的激光光束。
在步进电机的驱动下持续旋转,竖直面内的激光光束由“线”变成“面”,经旋转扫描形成多个激光“面”,从而实现探测区域内的3D扫描。
混合式激光雷达(MEMS)则是将微机电系统(MEMS)与振镜结合形成MEMS振镜,通过振镜旋转完成激光扫描。
驱动电路驱动激光器产生激光脉冲同时驱动MEMS振镜旋转,激光在旋转振镜的反射下实现扫描,经发射光学单元准直后射出。
希望以上信息可以帮到你。
905nm脉冲激光二极管驱动电路

905nm脉冲激光二极管驱动电路的设计905nm脉冲激光二极管在许多领域都有广泛的应用,如通信、激光雷达、光学传感等。
为了充分发挥其性能,一个优秀的驱动电路是必不可少的。
本文将详细介绍一种针对905nm脉冲激光二极管的驱动电路设计。
一、电路设计1. 电源供电驱动电路需要稳定的电源供电以提供所需的电压和电流。
我们选择一个开关电源,通过DC-DC转换器将输入电压转换为稳定的输出电压。
这种转换器具有高效率、低噪声和良好的负载响应特性。
2. 脉冲发生器为了产生脉冲激光,我们需要一个脉冲发生器。
我们选择一个基于TTL (Transistor-Transistor Logic)的脉冲发生器,它可以产生高速脉冲信号。
TTL脉冲发生器具有陡峭的前沿和后沿,能够确保激光二极管在脉冲期间正常工作。
3. 激光二极管驱动器激光二极管驱动器是核心部分,它需要能够提供足够的电流驱动激光二极管。
我们选择一个具有高带宽、低噪声和高驱动能力的驱动器。
该驱动器能够根据脉冲发生器的信号驱动激光二极管,使其在脉冲期间正常工作。
4. 反馈控制电路为了确保稳定的输出功率,我们设计了一个反馈控制电路。
该电路通过监测激光二极管的输出功率,调整驱动器的输出电流,从而保持输出功率稳定。
二、电路优化为了提高驱动电路的性能,我们采取了以下优化措施:1. 降低噪声:我们选择低噪声元件,并在电路中加入去耦电容,以降低电源噪声和电磁干扰。
2. 提高效率:我们优化电源电路的设计,降低功耗和热损耗,提高整个驱动电路的能效。
3. 保护二极管:我们设计了一个快速关断电路,能够在异常情况下快速关闭激光二极管,防止其损坏。
4. 温度补偿:我们加入了温度传感器和补偿电路,以补偿温度对激光二极管性能的影响。
三、总结本文介绍了一种针对905nm脉冲激光二极管的驱动电路设计。
该设计考虑了电源供电、脉冲发生器、二极管驱动器和反馈控制电路等多个方面,并进行了优化措施以提高性能。
这种驱动电路能够为905nm脉冲激光二极管提供稳定的、高效的驱动能力,使其在各种应用中发挥出色的性能。
激光测速系统中驱动电路的研究

( ) 用 于地质 勘 测 方 面 。通 常结 合 测速 系 统 2应 中的测距 功 能来测 量地形 地 貌 。 ( ) 用 于军事 方 面 。用 于各 种 激光 雷 达 或者 3应
特种小型测速仪 ,可 对 目标 的距离 、速度等做 出 测量和数据分析 ,并可辨别其类型 ( 如导弹 、飞机
1 激 光 测 速 原 理
Ke wo d taf n a e n ; p le —a e ;s mio d co ; l e eo i tr rv rcru t y r s r f c ma g me t i us d ls r e c n u tr a rv lcme e ;d e ic i 有 脉 冲 法 和 相 位 法 。 由 于相位 法 对 光 路 要 求 非 常 严 格 ,设 计 复 杂 ,本 文 中只考 虑 脉 冲法 测 速 系 统 。激 光 测 速 系 统 现 在 主
u e ae eo i ty Du o t e c mp e e in a d hg o to h a e h e me u e n e h iu s d Il rv lcmer . s e t h o lx d sg n ih c s fte l rp a a r me ttc n q e, s s s
维普资讯
电子科技 20 0 7年 第 3期 ( 总第 2 0期 ) 1
激 光 测 速 系统 中驱 动 电路 的研 究
王本超 ,张 向东 ,韩香娥
( 西安 电子科技 大学 通 信工程学院 , 西 陕
摘 要
西安 707 ) 10 1
激光测速技术的主要 方法有脉 冲法和相 位法 。由于激光相位 法测速 系统设 计 复杂 ,成本较 高 ,因
ttl调制激光驱动电路

ttl调制激光驱动电路【最新版】目录1.引言2.TTL 调制激光驱动电路的原理3.TTL 调制激光驱动电路的构成4.TTL 调制激光驱动电路的应用5.结语正文1.引言随着科技的发展,激光技术在各个领域中的应用越来越广泛。
在激光应用系统中,激光驱动电路是一个关键部分,它负责为激光器提供所需的电流和电压。
TTL(Transistor-Transistor Logic)调制激光驱动电路是一种常见的激光驱动电路,具有响应速度快、输出波形可控等优点。
本文将对 TTL 调制激光驱动电路的原理、构成和应用进行介绍。
2.TTL 调制激光驱动电路的原理TTL 调制激光驱动电路主要基于模拟信号和数字信号的转换原理。
通过将数字信号处理芯片输出的数字信号转换为模拟信号,进而驱动激光器工作。
TTL 电路是一种双极型晶体管电路,其工作速度较快,可实现高速调制。
3.TTL 调制激光驱动电路的构成TTL 调制激光驱动电路主要由以下几个部分组成:(1)数字信号处理芯片:负责产生数字信号,将其输出给后续电路。
(2)TTL 电路:将数字信号转换为模拟信号,驱动激光器工作。
(3)激光器:接收驱动电路提供的电流和电压,发出激光。
(4)其他:如滤波器、限幅器等外围电路,用于优化电路性能。
4.TTL 调制激光驱动电路的应用TTL 调制激光驱动电路广泛应用于激光测距、激光通信、激光雷达等领域。
在这些应用中,TTL 调制激光驱动电路负责为激光器提供所需的电流和电压,以实现高速、精确的激光输出。
5.结语TTL 调制激光驱动电路是一种重要的激光驱动电路,具有响应速度快、输出波形可控等优点。
窄脉冲半导体激光器驱动电路的设计与仿真试验

窄脉冲半导体激光器驱动电路的设计与仿真试验1. 引言1.1 研究背景与意义1.2 国内外研究现状与进展1.3 本文研究目的与意义2. 窄脉冲半导体激光器驱动电路的原理2.1 窄脉冲半导体激光器的特性与应用2.2 半导体激光器的驱动原理及基本电路2.3 窄脉冲半导体激光器驱动电路的设计要求3. 窄脉冲半导体激光器驱动电路的设计3.1 驱动芯片的选型和参数确定3.2 电源电路的设计3.3 输出电路的设计3.4 控制电路的设计4. 窄脉冲半导体激光器驱动电路的仿真试验4.1 仿真环境及参数设置4.2 仿真结果分析4.3 实验结果验证5. 结论与展望5.1 研究结论5.2 改进与展望5.3 研究成果及其应用前景注:本题提供的是论文的提纲,提纲所提及的内容并不一定全面详实,具体内容需根据论文的实际需要进行拓展和补充。
1. 引言1.1 研究背景与意义半导体激光器是一种非常重要的光电器件,广泛应用于通讯、医疗、车载雷达等领域。
而窄脉冲半导体激光器则具有输出功率高、调制速度快、瞬时带宽宽等优点,在光通信领域尤其受到青睐。
然而,窄脉冲半导体激光器驱动电路的设计非常复杂,因为它要求驱动电路的响应速度极快,同时需要精确控制输出波形的上升和下降时间、脉冲宽度和峰值电流等参数,以保证激光器输出的信号质量和稳定性。
因此,本文将针对窄脉冲半导体激光器驱动电路的设计与仿真试验进行研究,旨在通过提高驱动电路的精度、响应速度和稳定性,实现高速、高品质、高可靠性的窄脉冲半导体激光器输出。
此外,论文的研究成果也可以为半导体激光器驱动技术的进一步发展提供重要的参考。
1.2 国内外研究现状与进展窄脉冲半导体激光器驱动电路的设计和优化是一个相当热门的研究领域,国内外的学者和工程师们已经开展了许多有意义的研究。
例如,在驱动芯片的选型方面,有人采用多级集成器件,以提高驱动芯片的响应速度和稳定性;还有人使用瞬态电压抑制器,以避免过压对芯片的损害。
激光器驱动电路设计与应用
激光器驱动电路设计与应用激光器是一种利用受激辐射原理产生激光光束的装置。
它在现代科技领域有着广泛的应用,包括激光切割、激光打标、激光雷达等。
而激光器能够工作正常,离不开一个稳定可靠的驱动电路。
本文将探讨激光器驱动电路的设计原理与应用。
一、激光器驱动电路的基本原理激光器驱动电路主要包括激光二极管供电与电流控制两部分。
供电部分需要提供适当的电压和电流给激光二极管,而电流控制部分则需要保证激光二极管受到稳定的电流驱动。
在激光器的工作中,这两个部分必须配合协调,以确保激光器能够正常工作并产生所需的激光输出。
二、激光二极管供电设计在激光二极管供电设计中,需要考虑激光二极管的工作电压和电流需求。
一般情况下,我们可以使用直流电源来为激光二极管供电。
首先,根据激光二极管的额定工作电流和电压,选择合适的电源电压和额定电流。
其次,使用电源调节电路来保证供电的稳定性和精确性。
最后,通过合适的连接线路,将电源与激光二极管连接,以确保供电的可靠性和安全性。
三、激光二极管电流控制设计激光二极管电流控制设计是激光器驱动电路中非常重要的一部分。
在激光二极管的工作中,电流的稳定性对于激光输出的功率和频率具有直接影响。
因此,在设计电流控制环路时,需要考虑到以下几个方面。
1.电流控制模式的选择常见的电流控制模式有恒压模式和恒流模式。
恒压模式下,电路会根据激光二极管的电流需求来调整电压,保证其工作在恒定电流下;恒流模式下,则是通过电路控制来保持电流的恒定。
在实际应用中,应根据具体的需求选择合适的模式进行设计。
2.反馈控制环路的设计为了确保激光二极管电流的稳定,需要设计一个反馈控制环路。
这一环路通常包括一个比较器、一个误差放大电路和一个电流调整电路。
比较器用于比较实际电流与设定电流之间的差异,误差放大电路用于放大差异信号,而电流调整电路则用于根据差异信号调整输出电流。
3.稳定性和去抖动设计在电流控制环路的设计中,还需要考虑到稳定性和去抖动。
伺服驱动技术在激光雷达中的应用

伺服驱动技术在激光雷达中的应用近年来,随着无人驾驶、智能家居等领域的迅速发展,激光雷达技术也得到了广泛应用。
而伺服驱动技术的出现,则为激光雷达的高效高精度运行提供了重要保障。
本文将探讨伺服驱动技术在激光雷达中的应用情况。
一、激光雷达的基本原理激光雷达(LIDAR)是利用激光原理来实现距离、速度等参数测量的一种技术。
它的工作原理是通过激光器发射出一束光,并通过光电探测器接收回波信号,来计算目标物体到激光雷达的距离、速度等参数。
二、传统的激光雷达驱动方式传统的激光雷达驱动方式主要采用步进电机作为驱动,通过控制电机旋转角度,进而实现激光雷达的扫描。
但是,这种方式存在几个问题:1. 步进电机的旋转精度有限,无法满足高精度定位控制的要求。
2. 步进电机驱动方式的最高转速有限,无法满足高速运动的要求。
三、伺服驱动技术在激光雷达中的应用为了克服传统激光雷达驱动方式的缺陷,伺服驱动技术逐渐被引入到激光雷达中。
伺服驱动是一种闭环控制系统,通过内部控制器来驱动电机旋转,从而实现精准定位和速度控制。
与传统步进电机驱动方式相比,伺服驱动技术具有以下优点:1. 高精度定位:伺服电机的转动精度可以达到0.001°,能够满足高精度控制的要求。
2. 高速运动:由于未受到步进电机旋转速度限制,伺服驱动可以实现更高的转速和更快的控制响应速度,能够满足高速运动的要求。
3. 稳定性优异:伺服驱动系统采用闭环反馈控制方式,能够实时修正偏差,从而保证运动的稳定性。
四、伺服驱动技术的发展趋势目前,伺服驱动技术在激光雷达中的应用越来越广泛。
未来,随着激光雷达技术的不断升级,伺服驱动技术也将进一步发展壮大。
我们可以预见,伺服驱动技术将会在激光雷达等领域发挥越来越广泛的作用。
综上所述,伺服驱动技术在激光雷达中的应用已经逐渐成熟,并在激光雷达的高效高精度运行中发挥了重要作用。
伺服驱动技术的不断进步也将为激光雷达应用提供更加可靠、稳定、高效的驱动保障。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光雷达智能驱动电路
激光雷达是一种常用于测距和成像的高精度传感器,被广泛应用于自动驾驶、机器人导航、安防监控等领域。
然而,要实现激光雷达的高效稳定工作,离不开一个智能驱动电路的支持。
本文将介绍激光雷达智能驱动电路的原理和设计要点。
一、激光雷达智能驱动电路的原理
激光雷达智能驱动电路的主要任务是对激光模块进行驱动和控制,同时还需要实时采集和处理传感器的返回数据。
通常,这个电路包括了激光发射电路、接收放大电路和数据处理电路三部分。
1. 激光发射电路
激光发射电路主要负责提供适宜的电流和电压给激光器,以实现稳定而高效的激光发射。
其中,一个重要的考虑因素是激光器的保护。
由于激光器对温度和电流的敏感性,智能驱动电路应该能够根据激光器的工作状态,自动调整电流和温度。
2. 接收放大电路
激光雷达的工作原理是通过接收反射回来的光信号,并将其转换为电信号进行处理。
接收放大电路起到放大电压信号的作用,以保证后续的数据处理精确可靠。
3. 数据处理电路
数据处理电路主要任务是对从激光雷达接收到的信号进行处理和解码,以提取出有效的数据。
这部分电路通常包含了模数转换器、滤波器、微控制器等。
二、激光雷达智能驱动电路的设计要点
在设计激光雷达智能驱动电路时,需要考虑以下几个关键要点:
1. 电源稳定性
激光雷达工作时对电源的稳定性要求较高。
因此,智能驱动电路应
具备稳定的电源供应,并采取相应的电源滤波和稳压措施,以确保电
源的噪声和纹波尽可能小。
2. 温度和电流控制
激光器的温度和电流对激光器的寿命和工作性能影响较大。
因此,
智能驱动电路应具备温度和电流的实时监测和控制功能,能够根据激
光器的工作状态进行动态调整。
3. 接收信号增益控制
接收放大电路的增益控制对于激光雷达的测距和成像精度至关重要。
智能驱动电路应具备自适应增益控制的功能,能够根据接收信号的强
弱自动调整增益,以提高信号处理的可靠性和稳定性。
4. 数据处理与通信
数据处理电路需要能够进行实时的信号处理和数据解码,并能够通
过通信接口与上位机或其他设备进行数据传输。
智能驱动电路应具备
高速、可靠的数据传输能力,并支持常见的通信协议。
三、总结
激光雷达智能驱动电路是激光雷达系统中至关重要的一个组成部分,对激光雷达的工作稳定性和性能起着至关重要的影响。
设计和实现一
个高质量的激光雷达智能驱动电路需要综合考虑电源稳定性、温度和
电流控制、接收信号增益控制以及数据处理与通信等方面的要求。
只
有在这些关键要点得到有效解决的情况下,才能保证激光雷达的高效
稳定工作,满足各种实际应用需求。
激光雷达智能驱动电路的发展离不开工程师们不懈的努力和创新,
随着技术的不断进步,激光雷达智能驱动电路的性能和功能将不断提升,为各种应用提供更加可靠且精确的数据支持。