不同坐标系之间的变换
坐标系转换方法和技巧
坐标系转换方法和技巧1.二维坐标系转换:二维坐标系转换是将平面上的点从一个坐标系转换到另一个坐标系中。
常用的方法有旋转、平移和缩放。
-旋转:通过改变坐标系的旋转角度,可以将点从一个坐标系转换到另一个坐标系。
-平移:通过改变坐标系的平移量,可以将点从一个坐标系平移到另一个坐标系。
-缩放:通过改变坐标系的比例尺,可以将点从一个坐标系缩放到另一个坐标系。
2.三维坐标系转换:三维坐标系转换是将空间中的点从一个坐标系转换到另一个坐标系中。
常用的方法有旋转、平移和缩放。
-旋转:通过改变坐标系的旋转角度,可以将点从一个坐标系转换到另一个坐标系。
-平移:通过改变坐标系的平移量,可以将点从一个坐标系平移到另一个坐标系。
-缩放:通过改变坐标系的比例尺,可以将点从一个坐标系缩放到另一个坐标系。
3.地理坐标系转换:地理坐标系转换是将地球表面点的经纬度坐标转换为平面坐标系(如UTM坐标系)或其他地理坐标系中的点。
常用的方法有投影转换和大地坐标转换。
-投影转换:根据不同的地理投影模型,将地理坐标系中的点投影到平面上。
常用的地理投影包括墨卡托投影、兰伯特投影等。
-大地坐标转换:根据椭球模型和大地测量的理论,将地理坐标系中的点转换为具有X、Y、Z三维坐标的点。
常见的大地坐标系包括WGS84和GCJ-02等。
4.坐标系转换的技巧:-精度控制:在坐标系转换过程中,需要注意精度的控制,以确保转换后的坐标满足要求。
-参考点选择:在坐标系转换过程中,选取合适的参考点可以提高转换的准确性和稳定性。
-坐标系转换参数的确定:在进行坐标系转换时,需要确定旋转角度、平移量和比例尺等参数,可以通过多点共面条件、最小二乘法等方法进行确定。
-转换效率优化:针对大规模的坐标系转换,可以采用分块处理、并行计算等技术来提高转换效率。
在进行坐标系转换时,需要根据具体的需求选择适当的方法和技巧,并结合具体的软件工具进行实现。
同时,还需要注意坐标系转换的精度和准确性,确保转换结果符合要求。
坐标系之间的换算
地心空间 直角坐标系 参心空间 直角坐标系 割平面空间 直角坐标系 法线测量 坐标系 垂线测量 坐标系
高斯平面 直角坐标系
导弹发射 坐标系
一、不同空间直角坐标系的换算
参心←→参心空间直角坐标系间(如:克氏椭球←→IAG75椭球) 参心←→地心空间直角坐标系间(如:克氏或IAG75椭球←→WGS-84椭球) 三个变换公式(布尔莎、范士、莫洛金斯基)对于坐标换算而言等价,推导布 尔莎公式如下:
[ M (1 )] sin2 B cos B cos L X a X ( N a ) cos B cos L 2 C Y a Y ( N a ) cos B sin L [ M (1 )] sin B cos B sin L Z a Z ( N a )(1 e 2 ) sin B [ M (1 )] sin B(1 cos 2 B e 2 sin2 B
顾及
0 QX i Z Y
Z
0 X
Y X i 0 X Yi Z i 0 Z i Yi
Zi 0 Xi
Yi X X i Y 0 Z
(此即用于两空间直角坐标系相互变换的布尔莎七参数公式) 若上式中X=Y=0,Z≠0,则上式为五参数转换模型。若再有Z=0,则上式为 四参数转换模型。若尺度比参数亦为零,则得三参数转换模型 Xi X 0 X i Yi Y0 Yi Z i T Z 0 Z i 三参数转换公式是在假设两坐标系间各坐标轴相互平行,即轴系间不存在欧勒 角的条件下导出的,这在实际情况中往往是不可能的。在欧勒角不大,求得欧勒角
不同平面坐标系的定义及转换参数设置

不同平面坐标系的定义及转换参数设置下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
不同平面坐标系的定义及转换参数设置该文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document 不同平面坐标系的定义及转换参数设置 can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!平面坐标系是用来描述平面上点的位置的一种数学工具。
斜坐标系与直角坐标系的坐标变换

斜坐标系与直角坐标系的坐标变换1. 斜坐标系与直角坐标系的定义斜坐标系和直角坐标系是数学中常见的两种坐标系。
直角坐标系是我们通常熟悉的坐标系,用两个垂直轴(通常是x轴和y轴)来确定一个点的位置。
而斜坐标系则是通过一个斜轴和另一个垂直轴来确定点的位置。
在斜坐标系中,有一个轴倾斜于另一个,两个轴的交点不一定是原点。
2. 斜坐标系到直角坐标系的转换要将一个点从斜坐标系转换到直角坐标系,首先要找到斜坐标系的斜轴和垂直轴之间的夹角。
然后根据这个夹角,可以使用三角函数的关系将点的坐标从斜坐标系转换到直角坐标系。
具体的转换公式为:$$x' = x * cos(\\theta) - y * sin(\\theta)$$$$y' = x * sin(\\theta) + y * cos(\\theta)$$其中(x,y)是斜坐标系中点的坐标,(x’,y’)是直角坐标系中的坐标,θ是斜轴和垂直轴的夹角。
这样就可以将一个点在斜坐标系中的坐标转换到直角坐标系中。
3. 直角坐标系到斜坐标系的转换同样,如果要将一个点从直角坐标系转换到斜坐标系,也需要知道斜坐标系的斜轴和垂直轴的夹角。
转换公式为:$$x = x' * cos(\\theta) + y' * sin(\\theta)$$$$y = -x' * sin(\\theta) + y' * cos(\\theta)$$这样就可以将一个点在直角坐标系中的坐标转换到斜坐标系中。
4. 斜坐标系的应用斜坐标系在一些工程和物理领域中有一些特殊的应用。
比如在壳体结构设计中,斜坐标系能够更好地描述材料的受力情况,便于分析结构的稳定性。
在电力系统中,斜坐标系也可以用来分析电路中的相位关系,更好地控制电力系统的运行。
5. 结语斜坐标系和直角坐标系在数学和工程领域中都有着重要的作用。
了解坐标系之间的转换关系不仅可以帮助我们更好地理解问题,还可以应用到实际工程中去。
工程测量中不同坐标系变换与精度
工程测量中不同坐标系变换与精度
工程测量中,不同坐标系之间的变换和精度非常重要。
其中,常用的坐标系包括平面
直角坐标系、大地坐标系、投影坐标系等,不同坐标系之间的变换需要考虑到坐标系的基
准面、坐标轴方向、单位等因素。
一、坐标系的基准面
1. 平面直角坐标系的基准面为水平面,通常采用大地水准面作为参考面。
3. 投影坐标系的基准面通常为椭球面或平面,不同的投影方式会导致不同的基准面。
二、坐标轴方向的变换
不同坐标系的坐标轴方向也可能不同,因此需要进行某些坐标轴的转换。
1. 平面直角坐标系通常采用右手坐标系,其中x轴与东向、y轴与北向成正交关系。
2. 大地坐标系中,通常采用地心坐标系或以某个恒星为基准的坐标系,其中z轴与
地轴或某个恒星的指向相同。
3. 投影坐标系的坐标轴方向也有所不同,例如通常采用高斯投影系统的平面坐标系中,x轴指向中央经线的正方向,y轴指向赤道正方向。
三、单位的变换
2. 大地坐标系中,通常采用度或弧度作为单位。
四、变换精度的影响
不同坐标系之间的变换会影响精度,因此需要进行适当的考虑和处理。
1. 坐标系的变换会引入误差,误差的大小与变换参数的精度有关。
2. 不同坐标系之间的误差也有所不同,例如平面直角坐标系与大地坐标系之间的误
差通常比两个大地坐标系之间的误差更小。
综上所述,工程测量中的不同坐标系之间的变换和精度是非常重要的,需要进行适当
的考虑和处理。
为了保证测量的精度和稳定性,应选择合适的坐标系和变换方法,并进行
精确的计算和校正。
坐标系转换方法
坐标系转换方法
坐标系转换的方法有多种,以下是三种主要的方法:
1. 线性变换法:这种方法将原始坐标系中的点映射到新的坐标系中。
通过选择合适的矩阵,可以将坐标变换为新的形式。
线性变换法在处理平面坐标系时特别有效。
2. 多项式拟合法:这种方法利用多项式来拟合两个坐标系之间的关系。
通过找到一组对应点,并拟合出多项式方程,可以将一个坐标系中的点转换为另一个坐标系中的点。
这种方法适用于任何维度的坐标系转换。
3. 最小二乘法:这种方法利用最小二乘原理,通过优化误差平方和,找到最佳的坐标转换方法。
它可以用于各种类型的坐标系转换,包括线性变换、多项式拟合等。
最小二乘法对于处理具有大量数据点的复杂转换非常有效。
这些方法都有其适用范围和优缺点,在实际应用中需要根据具体情况选择最合适的方法。
坐标系的转换

对于坐标系之间的转换,目前我们国家有以下几种:1、大地坐标(BLH)对平面直角坐标(XYZ);2、北京54全国80及WGS84坐标系的相互转换;3、任意两空间坐标系的转换。
坐标转换就是转换参数。
常用的方法有三参数法、四参数法和七参数法。
以下对上述三种情况作转换基本原理描述如下:1、大地坐标(BLH)对平面直角坐标(XYZ)常规的转换应先确定转换参数,即椭球参数、分带标准(3度,6度)和中央子午线的经度。
椭球参数就是指平面直角坐标系采用什么样的椭球基准,对应有不同的长短轴及扁率。
一般的工程中3度带应用较为广泛。
对于中央子午线的确定的一般方法是:平面直角坐标系中Y坐标的前两位*3,即可得到对应的中央子午线的经度。
如x=3888888m,y=388888666m,则中央子午线的经度=38*3=114度。
另外一些工程采用自身特殊的分带标准,则对应的参数确定不在上述之列。
确定参数之后,可以用软件进行转换,以下提供坐标转换的程序下载。
2、北京54全国80及WGS84坐标系的相互转换这三个坐标系统是当前国内较为常用的,它们均采用不同的椭球基准。
其中北京54坐标系,属三心坐标系,大地原点在苏联的普而科沃,长轴6378245m,短轴6356863,扁率1/298.3;西安80坐标系,属三心坐标系,大地原点在陕西省径阳县永乐镇,长轴6378140m,短轴6356755,扁率1/298.25722101;WGS84坐标系,长轴6378137.000m,短轴6356752.314,扁率1/298.257223563。
由于采用的椭球基准不一样,并且由于投影的局限性,使的全国各地并不存在一至的转换参数。
对于这种转换由于量较大,有条件的话,一般都采用GPS联测已知点,应用GPS软件自动完成坐标的转换。
当然若条件不许可,且有足够的重合点,也可以进行人工解算。
详细方法见第三类。
3、任意两空间坐标系的转换由于测量坐标系和施工坐标系采用不同的标准,要进行精确转换,必须知道至少3个重合点(即为在两坐标系中坐标均为已知的点。
坐标系微分变换

坐标系微分变换微分变换是数学中的一种重要工具,广泛应用于物理学、工程学、经济学等领域。
其中,坐标系微分变换是一种常用的方法,用于描述和分析坐标系的变换规律。
本文将对坐标系微分变换进行详细的介绍和讨论,包括定义、常见的坐标系变换、坐标系变换的微分表示以及应用举例等。
1. 定义坐标系微分变换是指通过一个映射将不同坐标系之间的点进行相互转换的过程。
在二维平面内,我们通常采用笛卡尔坐标系(直角坐标系)表示点的位置,其中点的坐标由横纵坐标表示。
但在实际问题中,常常需要使用其他坐标系,如极坐标系、柱坐标系等,此时就需要进行坐标系的变换。
2. 常见的坐标系变换(1)笛卡尔坐标系与极坐标系的变换:在二维平面内,笛卡尔坐标系(x,y)与极坐标系(r,θ)之间的变换关系可以表示为:x = r*cosθy = r*sinθ(2)笛卡尔坐标系与柱坐标系的变换:在三维空间内,笛卡尔坐标系(x,y,z)与柱坐标系(ρ,θ,z)之间的变换关系可以表示为:x = ρ*cosθy = ρ*sinθz = z(3)笛卡尔坐标系与球坐标系的变换:在三维空间内,笛卡尔坐标系(x,y,z)与球坐标系(r,θ,φ)之间的变换关系可以表示为:x = r*sinφ*cosθy = r*sinφ*sinθz = r*cosφ3. 坐标系变换的微分表示在进行坐标系变换时,我们需要考虑坐标系之间的微小变化。
这种微小变化可以通过微分来描述。
以二维平面为例,设(x,y)为笛卡尔坐标系下的点,(r,θ)为极坐标系下的点,则在微小的变换过程中,两者的微分关系可以表示为:dx = dr*cosθ-r*sinθ*dθdy = dr*sinθ+r*cosθ*dθ类似地,对于三维空间内的其他坐标系变换,也可以得到相应的微分关系表达式。
4. 应用举例坐标系微分变换在物理学、工程学等领域有着广泛的应用。
下面以工程学中的机器人运动学为例,展示坐标系微分变换在实际问题中的应用。
坐标变换原理

坐标变换原理
坐标变换是一种数学操作,用来在不同的坐标系间进行转换。
它是将一个点或对象的位置从一个坐标系转换到另一个坐标系的方法。
在二维平面坐标系中,通常使用笛卡尔坐标系和极坐标系。
笛卡尔坐标系使用x和y轴来表示一个点的位置,而极坐标系使用半径和角度来表示。
坐标变换可以通过简单的公式来实现:
1. 笛卡尔坐标系转换为极坐标系:给定一个点的笛卡尔坐标(x, y),可以通过以下公式计算其极坐标(r, θ):
r = √(x² + y²)
θ = arctan(y/x)
2. 极坐标系转换为笛卡尔坐标系:给定一个点的极坐标(r, θ),可以通过以下公式计算其笛卡尔坐标(x, y):
x = r * cos(θ)
y = r * sin(θ)
这些公式将一个点在不同坐标系中的位置进行相互转换。
通过这些转换,可以在不同坐标系之间准确地描述和定位对象的位置。
除了坐标系之间的转换,还可以进行其他类型的坐标变换,如平移、缩放和旋转。
在平移中,点的位置通过添加一个固定的偏移量来改变。
在缩放中,点的位置通过乘以一个缩放因子来改变。
在旋转中,点的位置通过应用旋转矩阵来改变。
通过这些坐标变换,可以单独或组合地对对象进行不同类型的变换,使其在平面内按照所需的方式移动、缩放和旋转。
这在计算机图形学和计算机视觉中经常使用,用于实现图像转换、模型变换等应用。
坐标变换为我们提供了一种非常有用的工具,可以方便地在不同坐标系中进行准确的位置描述与处理。
工程测量中不同坐标系变换与精度
工程测量中不同坐标系变换与精度
工程测量中使用的不同坐标系变换方法有三种,即平面坐标系变换、空间坐标系变换
和坐标转换。
平面坐标系变换是指将测点的平面坐标从一个局部坐标系转换到另一个局部坐标系的
过程。
在实际测量中,为了保证测点的坐标具有一定的精度,常常需要在局部坐标系内进
行测量,然后将测得的结果转换到全局坐标系中。
平面坐标系变换的精度主要受到两个因
素的影响,即坐标系的建立精度和测点坐标的转换精度。
坐标系建立精度受到仪器的精度、测测人员的水平和环境影响等因素的影响,而测点坐标转换的精度主要受到坐标系的定义
和坐标转换公式的影响。
坐标转换是指在同一坐标系内,将测点的坐标由一种坐标表示方式转换为另一种坐标
表示方式的过程。
在工程测量中,常常需要将测点的坐标由球坐标转换为直角坐标,或者
由大地坐标转换为高斯投影坐标。
坐标转换的精度主要受到坐标转换公式的影响。
坐标转
换公式的准确性和计算方法对转换结果的精确性有很大影响。
在工程测量中,不同坐标系的变换和转换都会对测量结果的精度产生影响。
为了保证
测量结果的精度,需要选择合适的坐标系变换和转换方法,并且注意在建立坐标系和进行
坐标转换时的精度控制。
这样才能得到准确可靠的测量结果。
向量在不同坐标系的转换

向量在不同坐标系的转换
向量在不同坐标系之间的转换可以通过坐标变换公式实现。
假设
有一个向量v,在坐标系A下的坐标为(x1,y1),在坐标系B下的坐标
为(x2,y2),则向量v在坐标系A下的坐标(x1,y1)可以通过以下公式
转换为在坐标系B下的坐标(x2,y2):
[x2; y2] = [a11 a12; a21 a22][x1; y1]
其中,矩阵[a11 a12; a21 a22]为从坐标系A到坐标系B的坐标
变换矩阵,该矩阵表示了坐标系A中的基向量在坐标系B中的表示,
可以通过基向量的旋转、缩放、翻转等变换得到。
具体来说,如果坐
标系B是通过坐标系A逆时针旋转θ度得到的,则
a11 = cosθ, a12 = -sinθ
a21 = sinθ, a22 = cosθ
如果坐标系B是坐标系A沿x轴和y轴分别放大k1和k2倍得到的,则
a11 = k1, a12 = 0
a21 = 0, a22 = k2
如果坐标系B是坐标系A关于x轴、y轴或者原点对称得到的,
则对应的元素为±1,具体的取值可以根据具体的情况确定。
需要注意的是,在坐标系转换过程中,向量的长度和方向是不变的,只是表示向量的坐标发生了变化。
因此,为了保证转换的正确性,应该保证坐标变换矩阵的行列式不为0,以确保该矩阵是可逆的。
同时,在实际的计算中,也需要注意精度问题,避免由于舍入误差导致的计
算错误。
不同坐标系介绍及相互转换关系0
不同坐标系介绍及相互转换关系一、各坐标系介绍GIS的坐标系统大致有三种:Plannar Coordinate System(平面坐标系统,或者Custom 用户自定义坐标系统)、Geographic Coordinate System(地理坐标系统)、Projection Coordinate System(投影坐标系统)。
这三者并不是完全独立的,而且各自都有各自的应用特点。
如平面坐标系统常常在小范围内不需要投影或坐标变换的情况下使用,地理坐标系统和投影坐标系统是相互联系的,地理坐标系统是投影坐标系统的基础之一。
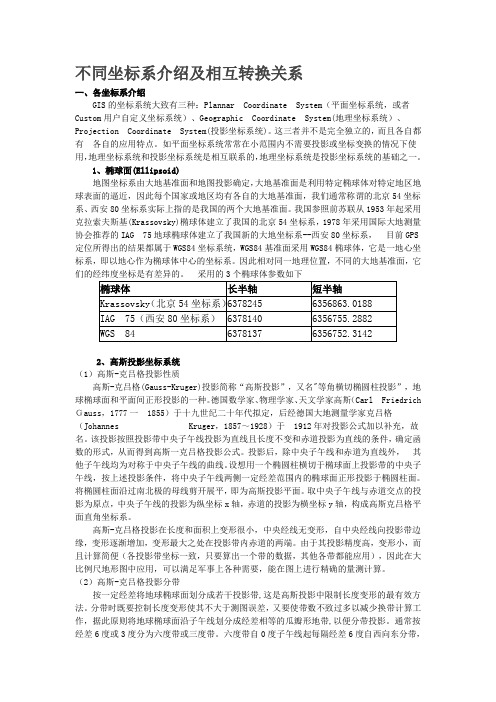
1、椭球面(Ellipsoid)地图坐标系由大地基准面和地图投影确定,大地基准面是利用特定椭球体对特定地区地球表面的逼近,因此每个国家或地区均有各自的大地基准面,我们通常称谓的北京54坐标系、西安80坐标系实际上指的是我国的两个大地基准面。
我国参照前苏联从1953年起采用克拉索夫斯基(Krassovsky)椭球体建立了我国的北京54坐标系,1978年采用国际大地测量协会推荐的IAG 75地球椭球体建立了我国新的大地坐标系--西安80坐标系,目前GPS定位所得出的结果都属于WGS84坐标系统,WGS84基准面采用WGS84椭球体,它是一地心坐标系,即以地心作为椭球体中心的坐标系。
因此相对同一地理位置,不同的大地基准面,它们2、高斯投影坐标系统(1)高斯-克吕格投影性质高斯-克吕格(Gauss-Kruger)投影简称“高斯投影”,又名"等角横切椭圆柱投影”,地球椭球面和平面间正形投影的一种。
德国数学家、物理学家、天文学家高斯(Carl Friedrich Gauss,1777一 1855)于十九世纪二十年代拟定,后经德国大地测量学家克吕格(Johannes Kruger,1857~1928)于 1912年对投影公式加以补充,故名。
该投影按照投影带中央子午线投影为直线且长度不变和赤道投影为直线的条件,确定函数的形式,从而得到高斯一克吕格投影公式。
使用坐标转换技术实现不同坐标系之间的转换
使用坐标转换技术实现不同坐标系之间的转换坐标转换是地理信息系统(GIS)中的一个重要应用,它可以将不同坐标系之间的数据进行转换和集成,从而使得不同坐标系下的地理数据能够相互对比和分析。
坐标转换技术的发展,为地理空间数据的处理和应用提供了更加便捷和灵活的方法。
一、坐标系统基础要理解坐标转换技术,首先需要了解坐标系统的基础知识。
在地理空间数据中,每一个地理位置都可以用坐标来描述,不同坐标系统下的坐标值可能不同。
常见的坐标系统有地理坐标系统(经纬度)和平面坐标系统(投影坐标系)。
地理坐标系统使用经度和纬度来确定地球上的位置,以地球为参照物。
经度表示东西方向,纬度表示南北方向。
而平面坐标系统则是将地球表面展开到一个平面上,使用直角坐标系来表示地理位置。
二、坐标转换方法在不同坐标系统之间进行转换,需要借助数学和几何的方法。
常见的坐标转换方法包括地理坐标到平面坐标的转换,以及平面坐标到地理坐标的转换。
1. 地理坐标到平面坐标的转换地理坐标转换为平面坐标的过程,就是将地球上的经纬度位置映射到一个平面上。
这涉及到大地测量学中的椭球体模型和坐标系统的定义。
在地理坐标到平面坐标的转换中,常用的方法是将经纬度转换为投影坐标系下的坐标。
这需要使用地理坐标系到投影坐标系的转换公式,该公式可以根据具体的投影方式、椭球体参数和投影中央经线来确定。
2. 平面坐标到地理坐标的转换与地理坐标转换为平面坐标相反,平面坐标到地理坐标的转换是将平面上的坐标位置反映到地球上。
这需要使用反向的转换公式。
平面坐标到地理坐标的转换涉及到椭球体参数、投影方式和中央经线等参数的定义。
通过这些参数和反向的转换公式,可以将平面上的坐标值转换为经纬度值。
三、坐标转换的应用坐标转换技术在GIS中有着广泛的应用。
几乎所有的GIS数据都需要进行坐标转换。
下面介绍几个坐标转换的应用场景。
1. 地图投影地图投影是将地球表面映射到一个平面上的过程。
在进行地图投影时,需要根据源数据的坐标系统和显示的需求选择合适的投影方式,然后对坐标进行转换。
测绘技术中的坐标变换方法介绍

测绘技术中的坐标变换方法介绍测绘技术作为一门专业学科,它不单纯是以地理学、地图学为基础知识,还融合了各种测量和数学方法。
其中,坐标变换是测绘技术中的一个重要概念和方法。
在测绘工作中,坐标变换可以帮助我们实现不同坐标系之间的转换,为地理信息系统、地图制图等提供了极大的便利。
本文将介绍测绘技术中的常见坐标变换方法。
一、平面坐标与大地坐标的转换方法在测绘工作中,我们通常会遇到不同坐标系之间的转换。
最常见的就是平面坐标与大地坐标之间的转换。
平面坐标是利用平面坐标系来表示地理位置的坐标值,而大地坐标则是使用经纬度等来表示地理位置的坐标值。
为了实现平面坐标与大地坐标的转换,我们可以利用以下方法:1. 大地坐标系统的参数化转换方法大地坐标系是地球表面上各个点的经纬度坐标表示。
要将大地坐标转换为平面坐标,我们可以采用参数化转换方法。
该方法通过定义一系列参数,以实现大地坐标到平面坐标的转换。
具体的参数化转换方法有著名的高斯投影、横轴墨卡托等。
2. 七参数变换法七参数变换法是常用的坐标变换方法,它适用于平面坐标与大地坐标之间的转换。
它通过七个参数的定义,分别对应平移、旋转和尺度变换等,从而将平面坐标与大地坐标之间进行转化。
二、不同大地坐标系之间的转换方法除了平面坐标与大地坐标之间的转换外,不同大地坐标系之间的转换也是测绘技术中常见的任务之一。
这是因为不同地区采用的大地坐标系可能具有不同的参数,因此需要进行转换以实现一致性。
以下是常见的大地坐标系转换方法:1. 布尔莎参数法布尔莎参数法是一种常用的大地坐标系转换方法。
它通过定义一系列参数,如椭球参数和基准点坐标等,以实现不同大地坐标系之间的转换。
2. 七参数变换法七参数变换法同样适用于不同大地坐标系之间的转换。
通过定义不同的七参数值,我们可以将一个大地坐标系转换为另一个大地坐标系,以满足具体测绘需求。
三、测量数据的坐标变换方法在测绘工作中,我们还需要对测量数据进行坐标变换,以将测量结果与已知的地理坐标体系相匹配。
三个坐标系之间的tf变换
三个坐标系之间的tf变换在ROS中,我们经常需要在不同的坐标系之间进行转换。
其中,最常用的就是在机器人本体坐标系(base_link)和世界坐标系(map)之间进行转换。
但实际上,在ROS中还存在其他两种坐标系:传感器坐标系(sensor)和相机坐标系(camera)。
那么,如果我们需要在这三个坐标系之间进行转换,应该怎么做呢?答案就是使用tf变换。
tf变换是ROS中的一个重要功能,其可以将不同坐标系之间的转换关系表示为一个树形结构。
通过这个树形结构,我们可以方便地实现坐标系之间的转换。
下面,我们以机器人本体坐标系、传感器坐标系和相机坐标系为例,介绍如何使用tf变换实现这三个坐标系之间的转换。
首先,我们需要在ROS中定义这三个坐标系。
可以通过urdf文件来定义机器人的kinematic结构和坐标系,也可以通过launch文件来定义传感器和相机的坐标系。
然后,我们需要使用tf库中的TransformBroadcaster和TransformListener两个类来实现tf变换。
TransformBroadcaster 用于发布tf变换,TransformListener用于监听tf变换。
接下来,我们需要编写代码来实现tf变换。
具体来说,我们需要:1. 创建一个ros::NodeHandle对象,用于与ROS系统通信。
2. 创建一个TransformBroadcaster对象,用于发布tf变换。
3. 在代码中定义一些变量,例如机器人本体坐标系到传感器坐标系的旋转矩阵和位移矢量。
4. 在ros::Rate循环中,调用TransformBroadcaster::sendTransform()方法发布tf变换。
5. 创建一个TransformListener对象,用于监听tf变换。
6. 在代码中调用TransformListener::lookupTransform()方法获取需要的tf变换。
通过上述步骤,我们就可以实现在机器人本体坐标系、传感器坐标系和相机坐标系之间进行tf变换了。
地理坐标系转换公式

地理坐标系转换公式以下是几种常用的地理坐标系转换公式:1.地球椭球体转平面:地球椭球体转平面是将地球椭球体上的点的经纬度坐标转换为平面坐标的过程。
常用的公式有墨卡托投影、高斯-克吕格投影等。
-墨卡托投影:墨卡托投影是一种等角圆柱投影,其转换公式如下:x = R * lony = R * log(tan(π/4 + lat/2))其中,R为地球半径,lon为经度,lat为纬度,x和y为平面坐标。
-高斯-克吕格投影:高斯-克吕格投影是一种正轴等角圆锥投影,其转换公式如下:λs=λ-λ0B = 1 / sqrt(1 - e² * sin²(φ))ρ = a * B * tan(π/4 + φ/2) / (1 / sqrt(e² * cos²(φ0 - B * λs)^2))E = E0 + k0 * ρ * sin(B * λs)N = N0 + k0 * [ρ * cos(B * λs) - a * B]其中,λ为经度,φ为纬度,λ0和φ0为中央经线和纬度原点,a 为长半轴,e为椭球体偏心率,E和N为平面坐标,E0和N0为偏移量,k0为比例因子。
2.平面转地球椭球体:平面转地球椭球体是将平面坐标转换为经纬度坐标的过程。
常用的公式有逆墨卡托投影、逆高斯-克吕格投影等。
-逆墨卡托投影:逆墨卡托投影是墨卡托投影的逆过程,其转换公式如下:lat = 2 * atan(exp(y / R)) - π/2lon = x / R其中,R为地球半径,x和y为平面坐标,lat和lon为经纬度。
-逆高斯-克吕格投影:逆高斯-克吕格投影是高斯-克吕格投影的逆过程,其转换公式如下:φ1 = atan[(Z / √(Z² + (N0 - N)²))]φ0 = φ1 + ((e² + 1)/ (e² - 1)) * [sin(2φ1) + ((e² / 2) * sin(4φ1)) + ((e⁴ / 8) * sin(6φ1)) + ((e⁶ / 16) * sin(8φ1))]B = 1 / sqrt(1 - e² * sin²(φ1))β=N/(a*B)φ = φ1 - (β / 2) * [sin(2φ1) + ((e² / 2) * sin(4φ1)) + ((e⁴ / 8) * sin(6φ1)) + ((e⁶ / 16) * sin(8φ1))]λ = λ0 + (at an[(E - E0) / (N0 - N)]) / B其中,Z=√((E-E0)²+(N0-N)²),φ1为近似纬度,φ0为中央纬度,B为大地纬度变换系数,β为纬度差异因子,φ和λ为经纬度。
常用坐标系及其间的转换
显然,如果发射坐标系与发射惯性坐标系各有一轴与地球转动相平行,那它们之间 方向余弦阵将是很简单的。一般情况下,这两个坐标系对转动轴而言是处于任意的位置。 因此,首先考虑将这两个坐标系经过一定的转动使得相应的新坐标系各有一轴与转动轴 平行,而且要求所转动的欧拉角是已知参数。一般情况下两个坐标的关系如图 1.7 所示。
过天文年历年表查算得到,记该角为 ΩG ,显然,这两个坐标系之间仅存在一个欧拉角
ΩG ,因此不难写出两个坐标系的转换矩阵关系。
⎡XE⎤
⎡XI ⎤
⎢ ⎢
YE
⎥ ⎥
= EI
⎢ ⎢
YI
⎥ ⎥
(1.1)
⎢⎣ ZE ⎥⎦
⎢⎣ ZI ⎥⎦
其中
⎡ cos ΩG sin ΩG 0⎤
EI
=
⎢ ⎢
−
sin
ΩG
cos ΩG
含意是不同的。因为过发射点的圆球表面的切平面与椭球表面的切平面不重合,即圆球
时 oy 轴与过 o 点的半径 R 重合,如图 1.1 所示,而椭球时 oy 轴与椭圆过 o 点的主法线
重合,如图 1.2 所示。它们与赤道平面的夹角分别称为地心纬度(记作φ0 )和地理纬度
(记作 B0 )。在不同的切平面 ox 轴与子午线切线正北方向的夹角分别称为地心方位角
sinϕ cosψ sinϕ sinψ sin γ + cosϕ cosγ sinϕ sinψ cosγ − cosϕ sin γ
由图 1.4 可看出各欧拉角的物理意义。
−sinψ ⎤
cosψ
sin
γ
⎥ ⎥
cosψ cosγ ⎥⎦
《坐标系转换专题》课件
矩阵运算:矩阵乘法、矩阵 求逆等
应用:在图形学、机器人学 等领域广泛应用
确定转换矩阵:通过已知点坐标和转换后的坐标,计算转换矩阵 确定转换参数:根据转换矩阵,确定转换参数,如旋转角度、平移向量等 确定转换顺序:根据转换参数,确定转换顺序,如先旋转后平移 确定转换精度:根据转换参数,确定转换精度,如小数位数、误差范围等
坐标系转换:将一种坐标系的数据 转换为另一种坐标系的数据
添加标题
添加标题
添加标题
Байду номын сангаас
添加标题
地图投影:将地球表面的地理数据 投影到平面上
应用场景:地图制作、地图投影、 导航系统、地理信息系统等
智能化:随着人工智能技术的发展, 坐标系转换技术将更加智能化,能 够自动识别和转换各种坐标系。
实时性:随着通信技术的发展,坐 标系转换技术将更加实时,能够实 时进行坐标转换和定位。
优点: a. 自动化程度高,减少人工操作 b. 转换速度快,提高工作效率 c. 转换精度高,保证数据准确 性 d. 可实现多种坐标系之间的转换
● a. 自动化程度高,减少人工操作 ● b. 转换速度快,提高工作效率 ● c. 转换精度高,保证数据准确性 ● d. 可实现多种坐标系之间的转换
缺点: a. 需要一定的编程基础和软件操作技能 b. 软件兼容性问题,可能无法在所有平台上运行 c. 软 件更新和维护需要一定的时间和成本 d. 软件可能存在bug或漏洞,影响数据安全和准确性
直角坐标系到极坐标系的转换:利用三 角函数和反三角函数进行转换
极坐标系到直角坐标系的转换:利用三 角函数和反三角函数进行转换
球坐标系到直角坐标系的转换:利用球 面坐标公式进行转换
直角坐标系到球坐标系的转换:利用球 面坐标公式进行转换
不同坐标系之间的变换
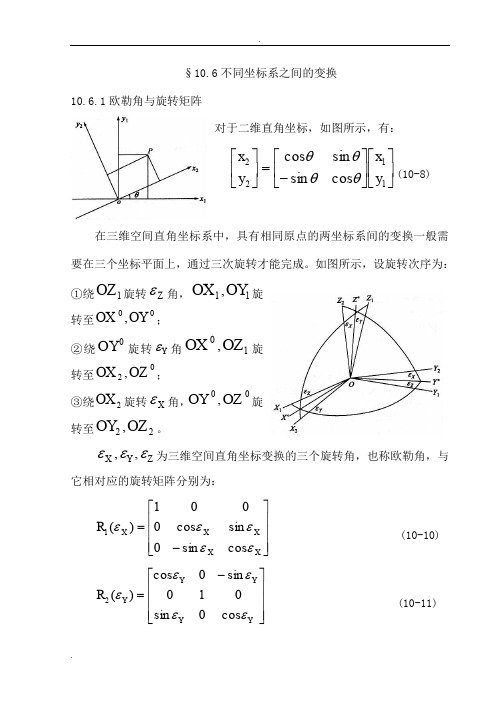
§10.6不同坐标系之间的变换10.6.1欧勒角与旋转矩阵对于二维直角坐标,如图所示,有:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡1122cos sin sin cos y x y x θθθθ(10-8)在三维空间直角坐标系中,具有相同原点的两坐标系间的变换一般需要在三个坐标平面上,通过三次旋转才能完成。
如图所示,设旋转次序为: ①绕1OZ 旋转Z ε角,11,OY OX 旋转至00,OY OX ;②绕0OY 旋转Y ε角10,OZ OX 旋转至02,OZ OX ; ③绕2OX 旋转X ε角,,OZOY 旋转至22,OZ OY 。
Z Y X εεε,,为三维空间直角坐标变换的三个旋转角,也称欧勒角,与它相对应的旋转矩阵分别为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=X XX X X R εεεεεcos sin 0sin cos 0001)(1 (10-10)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=Y YY YY R εεεεεcos 0sin 010sin 0cos )(2(10-11)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=100cos sin 0sin cos )(3ZZ Z ZZ R εεεεε (10-12)令 )()()(3210Z Y X R R R R εεε= (10-13)则有:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡1110111321222)()()(Z Y X R Z Y X R R R Z Y X Z Y X εεε (10-14) 代入:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+++--=Y X Z Y X Z X Z Y X Z X Y X Z Y X Z X Z Y X Z X Y Z Y Z Y R εεεεεεεεεεεεεεεεεεεεεεεεεεεεεcos cos sin sin cos cos sin cos sin cos sin sin cos sin sin sin sin cos cos cos sin sin sin cos sin sin cos cos cos 0一般Z Y X εεε,,为微小转角,可取:sin sin sin sin sin sin sin ,sin ,sin 1cos cos cos =========Z Y Z X Y X ZZ Y Y X X Z Y X εεεεεεεεεεεεεεε于是可化简⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=1110XYX Z Y ZR εεεεεε (10-16) 上式称微分旋转矩阵。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§10.6不同坐标系之间的变换
10.6.1欧勒角与旋转矩阵
对于二维直角坐标,如图所示,有:
⎥⎦
⎤
⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡1122cos sin sin cos y x y x θθθθ(10-8)
在三维空间直角坐标系中,具有相同原点的两坐标系间的变换一般需要在三个坐标平面上,通过三次旋转才能完成。
如图所示,设旋转次序为: ①绕1OZ 旋转Z ε角,11,OY OX 旋
转至0
0,OY OX ;
②绕0
OY 旋转Y ε角
10
,OZ OX 旋转至0
2
,OZ OX ; ③绕2OX 旋转X ε角,
0,OZ OY 旋转至22,OZ OY 。
Z Y X εεε,,为三维空间直角坐标变换的三个旋转角,也称欧勒角,与
它相对应的旋转矩阵分别为:
⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡-=X X
X X X R εεεεεcos sin 0sin cos 00
01
)(1 (10-10)
⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡-=Y Y
Y Y
Y R εεεεεcos 0sin 010sin 0cos )(2 (10-11)
⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡-=10
0cos sin 0sin cos )(3Z
Z Z Z
Z R εεεεε (10-12)
令 )()()(3210Z Y X R R R R εεε= (10-13)
则有:
⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡1110111321222)()()(Z Y X R Z Y X R R R Z Y X Z Y X εεε (10-14) 代入:
⎥⎥⎥⎦
⎤⎢⎢
⎢⎣⎡
+-+++--=Y X Z Y X Z X Z Y X Z X Y X Z Y X Z X Z Y X Z X Y Z Y Z Y R εεεεεεεεεεεεεεεεεεεεεεεεεεεεεcos cos sin sin cos cos sin cos sin cos sin sin cos sin sin sin sin cos cos cos sin sin sin cos sin sin cos cos cos 0一般Z Y X εεε,,为微小转角,可取:
sin sin sin sin sin sin sin ,sin ,sin 1cos cos cos =========Z Y Z X Y X Z
Z Y Y X X Z Y X εεεεεεεεεεεεεεε
于是可化简
⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡---=111
0X
Y
X Z Y Z
R εεεεεε (10-16) 上式称微分旋转矩阵。
10.6.2不同空间直角坐标之间的变换
当两个空间直角坐标系的坐标换算既有旋转又有平移时,则存在三个平移参数和三个旋转参数,再顾及两个坐标系尺度不尽一致,从而还有一
个尺度变化参数,共计有七个参数。
相应的坐标变换公式为:
⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡∆∆∆+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000111111222000)1(Z Y X Z Y X Z Y X m Z Y X X
Y
X Z Y Z
εεεεεε(10-17) 上式为两个不同空间直角坐标之间的转换模型,其中含有7个转换参数,为了求得7个转换参数,至少需要3个公共点,当多于3个公共点时,可按最小二乘法求得个参数的最或是值。
10.6.3不同坐标系的变换
对于不同坐标系的换算,除包含三个平移参数、三个旋转参数和一个尺度变化参数外,还包括两个地球椭球元素变化参数,以下推导不同坐标系的换算公式。
由(7-30)式
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎣⎡+-++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡B H e N L B H N L B H N Z Y X sin ])1([sin cos )(cos cos )(2
取全微分得
⎥⎦⎤
⎢⎣⎡+⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡αd da A dH dB dL J dZ dY dX (10-19) 式中
⎥⎥⎥
⎦
⎤⎢⎢
⎢
⎣⎡++-++-+-=⎥⎥⎥⎥⎥⎥⎦
⎤
⎢⎢⎢⎢
⎢⎢⎣⎡∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂=B B H M L B L B H M L B H N L B L B H M L B H N H Z B
Z L
Z H Y B Y L Y H X B X
L X
J sin cos )(0cos cos sin sin )(cos sin )(cos cos cos sin )(sin cos )((10-20)
⎥⎥⎥⎥⎥⎥⎦
⎤
⎢⎢⎢⎢⎢⎢⎣⎡-+-----=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢
⎢⎢⎣⎡∂∂∂∂∂∂∂∂∂∂∂∂=)sin cos 1(sin 1sin )1(sin sin cos 1sin cos sin cos cos 1cos cos 222222
B e B B M B e a
N B
L B M L B a
N B L B M L B a N Z a
Z Y a Y X
a X
A ααα
α
αα (10-21)
上式两端乘以1-J 并加以整理得:
⎥⎦⎤
⎢⎣⎡-⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--αd da A J dZ dY dX J dH dB dL 11 (10-22)
式中
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡111222Z Y X Z Y X dZ dY dX
⎥⎥⎥
⎦
⎤⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡111222H B L H B L dH dB dL 顾及(10-21)式及
⎥⎥
⎥⎥
⎥⎥⎦⎤⎢⎢⎢⎢⎢
⎢⎣
⎡
++-
+-++-=-B L
B L B H M B H M L B H M L B B H N L B H N L J sin sin cos cos cos cos sin sin cos sin 0
cos )(cos cos )(sin 1
(10-23) (10-22)式可写为:
=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡dH dB dL ⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡∆∆∆⎥⎥⎥⎥⎥⎥
⎦
⎤⎢⎢
⎢⎢⎢⎢⎣
⎡''+'
'+-''+-'
'+''+-000sin sin cos cos cos cos sin sin cos sin 0
cos )(cos cos )(sin Z Y
X B L
B L B H
M B H M L B H
M L B B H N L
B H N L ρρρρρ ⎥⎥⎥⎦⎤
⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎢
⎣
⎡
'
'''---+Z Y X L
B B Ne L B B Ne L
L
L tgB L tgB εεερρ0cos cos sin sin cos sin 0cos sin 1sin cos 2
2
m
H B e N B B e H M N ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+-''+-+)sin 1(cos sin 0
2
22ρ
⎥
⎦⎤⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦
⎤
⎢
⎢⎢⎢⎢⎢⎣⎡----''-+-''++ααραρd da B B e M B e a N B B H M B e M B B e a H M N 2
222
2222sin )sin 1(1)sin 1(cos sin )1)(()
sin 2(cos sin )(0
(10-24)
上式通常称为广义坐标微分公式或广义变换椭球微分公式。
如略去旋转参数和尺度变化参数的影响,即简化为一般的坐标微分公式。
根据3个以上公共点的两套坐标值,可列出9个以上(10-24)式的方程,可按最小二乘法求得8个转换参数。