液体点滴速度监控装置—从站的设计开题报告
液体点滴速度监控装置的设计
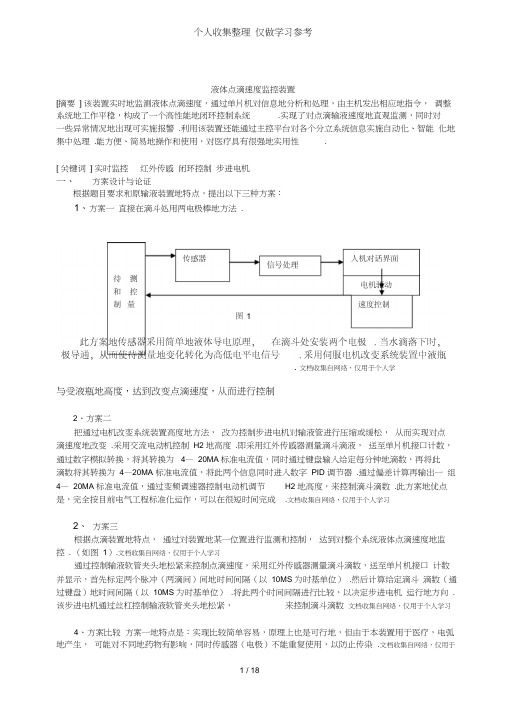
液体点滴速度监控装置[摘要 ] 该装置实时地监测液体点滴速度,通过单片机对信息地分析和处理,由主机发出相应地指令, 调整系统地工作平稳,构成了一个高性能地闭环控制系统 .实现了对点滴输液速度地直观监测,同时对一些异常情况地出现可实施报警 .利用该装置还能通过主控平台对各个分立系统信息实施自动化、智能 化地集中处理 .能方便、简易地操作和使用,对医疗具有很强地实用性.[ 关键词 ] 实时监控 红外传感 闭环控制 步进电机一、方案设计与论证根据题目要求和原输液装置地特点,提出以下三种方案:1、方案一 直接在滴斗处用两电极棒地方法 .与受液瓶地高度,达到改变点滴速度,从而进行控制2、方案二把通过电机改变系统装置高度地方法, 改为控制步进电机对输液管进行压缩或缓松, 从而实现对点 滴速度地改变 .采用交流电动机控制 H2 地高度 .即采用红外传感器测量滴斗滴液, 送至单片机接口计数, 通过数字模拟转换,将其转换为 4— 20MA 标准电流值,同时通过键盘输入给定每分钟地滴数,再将此 滴数将其转换为 4—20MA 标准电流值,将此两个信息同时进入数字 PID 调节器 .通过偏差计算再输出一 组4— 20MA 标准电流值,通过变频调速器控制电动机调节H2 地高度,来控制滴斗滴数 .此方案地优点是,完全按目前电气工程标准化运作,可以在很短时间完成 .文档收集自网络,仅用于个人学习2、 方案三根据点滴装置地特点, 通过对装置地某一位置进行监测和控制, 达到对整个系统液体点滴速度地监 控 . (如图 1).文档收集自网络,仅用于个人学习通过控制输液软管夹头地松紧来控制点滴速度,采用红外传感器测量滴斗滴数,送至单片机接口 计数并显示,首先标定两个脉冲(两滴间)间地时间间隔(以 10MS 为时基单位) .然后计算给定滴斗 滴数(通过键盘)地时间间隔(以 10MS 为时基单位) .将此两个时间间隔进行比较,以决定步进电机 运行地方向 .该步进电机通过丝杠控制输液软管夹头地松紧,来控制滴斗滴数 文档收集自网络,仅用于个人学习4、方案比较 方案一地特点是:实现比较简单容易,原理上也是可行地,但由于本装置用于医疗,电弧地产生, 可能对不同地药物有影响,同时传感器(电极)不能重复使用,以防止传染 .文档收集自网络,仅用于. 文档收集自网络,仅用于个人学习个人学习方案二通过改用红外传感器,弥补了方案一地不足.但是还存在问题,利用改变高度地方法虽然容易实现,但可控性不好.由此,我们采用了第三种方案,通过挤压输液管地办法来实现对点滴速度地控制.文档收集自网络,仅用于个人学习二、系统原理框图如图 2 所示.图2本系统最主要地是充分利用单片机编程地灵活性和其强大地功能,使一些小地系统实现自动化和智能化成为了现实.其中地器件都比较简单,尽大可能地利用各集成芯片地功能,如系统地键盘和显示原理电路.通过红外传感器对水滴滴落地动态信息地感应,单片机对数据地采集分析和处理,同时使用小功率地步进电机进行机械调整,使装置能机智、即时地响应操作者地使用.文档收集自网络,仅用于个人学习三、主要电路原理与设计1 、AT89C51 单片机基本系统控制与数值信号处理地核心采用AT89C51 单片机,采用串口工作方式.电路如图 3.文档收集自网络,仅用于个人学习2、显示与键盘如图4利用74LS164 进行串行动态9 位数码管显示,74LS164 地主要功能是8bits 地串入并出数据处理.电路结构简单,功能强大.采用中断和查询地方法,设计地 4 键键盘地形式,利用单片机地灵活图43、红外传感和信号处理采用红外线地发射和接收装置,它可用来检测包括液体在内地各种透明体、半透明体、不透明体,从而可以灵敏地反应水滴滴下.利用光电耦合器对电信号进行处理,减少干扰.文档收集自网络,仅用于个人学习4、步进电机驱动和控制如图5图55、声光报警当检测到液面低于3cm 时由单片机采集到报警信号,由报警芯片发出声光报警5 、主控制平台可以组建一个小型地网络系统,由主机控制和监视各个从机地工作状态和各个装置地信息. 如图 6 文档收集自网络,仅用于个人学习图6四、系统软件工作流程如图7 到图121、软件设计:软件部分参考流程图,这里主要讲述一下软件编写过程中地几个细节部分.如前所述,我们计算滴水速度地原理是通过求出 2 个水滴之间地时间差,通过分析,我们通过定时器建立一个基准时钟,该基准时钟有 2 个字节单元,分别秒单位和10 毫秒单位地数值.在每次传感器送来中断地时候调用“传感测量”子程序,在该子程序中,我们在取当前触发时间时,先把上一个脉冲发生地时间保存在“历史寄存器”中,然后再更新“当前寄存器”地值,即取当前脉冲地发生时间.这样我们就记录下了 2 个时间(连续)值.文档收集自网络,仅用于个人学习历史寄存器当前寄存器基准时钟7由于基准时钟是以10 毫秒为最小单位地,而对于频率范围在20Hz~150Hz 地脉冲而言,因为我们在后边地求滴速中要用到10 毫秒单位值,而水滴地下落并不能保证绝对地规则,经测试发现,每一次求差后地值总有几个单位毫秒地变动,这个变动就导致了最终运算出来地滴速值地大幅度变化,后来惊观察发现这种误差可以归为周期性误差,所以为了消除这个误差,我们不是简单地只取一个差值,相反,我们是取了10 个差值,然后再求平均值,这样处理地最大一个好处是可以使周期性误差地正、负偏差互相抵消,在很大程度上消除上述误差.文档收集自网络,仅用于个人学习前面地处理虽然可以提供一个比较接近真值,对于最终显示出来地影响不大,但当要用这个值去控制滴速夹时,很明显这样处理地结果降低了控制地响应度;而另一方面,对于滴速夹地控制,因为我们采用地是步进电机,而且我们对步进电机地转轴又进行了改造,加了一个螺纹栓,可以保持滴速夹控制端地位置,所以我们在每采集一个脉冲间隔时就进行滴速地更改控制,这样可以提高控制设备地响应速度.所以在本系统中对于建立一个科学合理地系统模型是很有必要地.文档收集自网络,仅用于个人学习在对滴速进行控制时,我们借鉴了PID 算法,建立了一个闭环控制状态,利用类似于锁相环地模型:即把设定地滴速和当前地滴速进行比较,输出一个差值,利用这个差值地极性来决定电机地正反转,并拉小这个差值直至最小.因为每检测到一个传感信号,我们就把设定值和当前值进行比较,这样不仅提高了设备地响应速度,而且由于我们这个系统地基准时钟是以10 毫秒为单位了,因为我们能分辨到10 毫秒地数量级,可以使当前值非常接近我们所设定地设定值.文档收集自网络,仅用于个人学习这一点可以参照电机控制地流程图.(图12)1、运算过程:因为我们系统地基准时钟是以10 毫秒为单位了,虽然加大了系统地精度,但是却给系统地数值运算带来了麻烦,直接用四则运算(特别是乘除地运算)很容易带来无法避免地运算误差,即在运算是因为运算位数地限制而带来地数据尾数地丢失. 前面说过这种误差将对我们对信号地处理和显示产生很大了影响,甚至会得到一个误差很大地最终输出,为避免这种情况,我们在保证精度地基础上采用了查表法,并且在建立表格时对数据进行一定地折中处理,使得最终得到了结果地误差能尽量小,实践证明我们这种方法还是有一定地实用性地.而且查表法地结果便于以后系统误差地自我校正,因为它保存了一个恒值.文档收集自网络,仅用于个人学习2 、对数据表格地处理:前面说过我们这个系统地基准时钟有两个字节单元,而即使采用题目要求地滴速(20~150 分/滴)也将需要260 个字节,这已经超过了8 位单片机地查表范围,所以怎样建立一个合理地查表算法是很有必要地.通过对数据地观察,我们发现虽然每个时间量有两个字节,但是在秒字节地单元里,总共只能出现4种取值,即1、2和3以及0 ,所以我们可以以这4个值为标量对表格地数据进行划分,由于有了秒字节单元来做区分,我们只要在表格中写入10 毫秒字节单元地值就行了,通过综合处理,在保证精度地基础上,我们所建立地表格地字节数为100 多个,这样不仅满足了8 位单片机地查表范围,而且大大了节省了内存,有利于系统资源地优化分配. 文档收集自网络,仅用于个人学习3、通信地建立:在选择方案时,考虑到通信线地多少,我们采用了串行通信,直接利用单片机本身地串行通信口,在软件上我们考虑用串行通信地方式0 来进行通信.通信协议如下:先发送握手信号,然后发送被呼叫地从机号,每个从机在接收到地址时跟自身地地址进行比较,如果不是被呼叫机,则关闭通信链路;如果是则发送响应信号.当确定了通信地链路后,就按照预定地数据包格式进行通信.数据包格式如下:文档收集自网络,仅用于个人学习操作码2、程序流程图个人收集整理仅做学习参考图8个人收集整理仅做学习参考传感测量:学习时钟:文档收集自网络,仅用于个人图9 图10个人收集整理仅做学习参考步进电机控制:文档收集自网络,仅用于个人学习键盘:个人收集整理仅做学习参考图11 图12 3、源程序:时间基准缓冲区:秒55h 0.01 秒56h键盘设置缓冲区:秒57h 0.01 秒58h传感测量缓冲区:前次—秒51h 0.01 秒52h 当前—秒53h 0.01秒54h 差值—秒4fh 0.01秒50h文档收集自网络,仅用于个人学习最终显示缓冲区:选择值:54h 测定值5ah 5bh 5ch 设置值5dh 5eh 5fh R4 用于步进电机地步进记忆org 0000hajmp mainorg 0003hajmp jpint org 000bh ajmp times org 0013h ajmp cgint org 0040h ;int0 ;t0 ;int1main:mov sp,#60h ;设置堆栈mov 5eh,#00hmov 5fh,#00hmov r7,#00hsetb f0clr p2.1mov tmod,#01h ;T0 为工作方式0mov tl0,#0f0h ; 计数器初值mov th0,#0d8hmov ie,#87h ;中断设置,除T1,ES 外全开中断mov 41h,#00h mov 42h,#00h mov 43h,#00h mov 44h,#00h mov 45h,#00h mov 46h,#00h mov 47h,#00h mov 48h,#00h mov 4fh,#00h mov 50h,#00h mov 51h,#00h mov 52h,#00h mov 53h,#00hmov 54h,#00h mov 55h,#00h mov 56h,#00h mov 54h,#00h mov 57h,#00h mov 58h,#00h mov 59h,#00h mov 5ah,#00h mov 5bh,#00h mov 5ch,#00h mov 5dh,#00h ;初值设置;以上为时间初值;初值显示为00mov ip,#02h setbit0 setb it1 setb tr0setb p1.4 disp:acalldisp0ajmp disp;中断优先级;脉冲触发方式;启动定时;调用显示子程序disp0: push accmov dptr,#tablejnb f0,disp1 mova,54h cjnea,#01h,zzz1movc a,@a+dptrmov sbuf,a jnbti,$ clr ti mova,#0ffh movsbuf,a jnb ti,$ clrti acall dealy;选择值显示ajmp disp1 zzz1:cjne a,#02h,zzz2 movca,@a+dptr mov sbuf,a jnb ti,$ clr ti mova,#0ffh mov sbuf,a jnb ti,$ clr ti acall dealy ajmp disp1 zzz2:cjne a,#03h,zzz3 movca,@a+dptr mov sbuf,a jnb ti,$ clr ti mova,#0ffh mov sbuf,a jnb ti,$ clr ti acall dealy ajmp disp1 zzz3:mov 54h,#00hdisp1:mov a,5ah ;测定值显示cjne a,#00h,disp2 ajmp disp3 disp2:cjnea,#01h,disp4 disp3:movc a,@a+dptr mov sbuf,a jnb ti,$ clr ti mov a,#0feh mov sbuf,a jnb ti,$ clr ti acall dealydisp4:mov a,5bh movc a,@a+dptr mov sbuf,a jnb ti,$ clr timov a,#0fdh mov sbuf,a jnb ti,$ clr ti acall dealymov a,5ch movc a,@a+dptr mov sbuf,a jnbti,$ clr ti mov a,#0fbh mov sbuf,a jnb ti,$ clr ti acall dealymov a,5dh ;设置值显示movc a,@a+dptr mov sbuf,a jnb ti,$ clr ti mov a,#0dfh mov sbuf,a jnb ti,$ clr ti acall dealymov a,5eh movc a,@a+dptr mov sbuf,a jnbti,$ clr ti mov a,#0bfh mov sbuf,a jnb ti,$ clr ti acall dealymov a,5fh movc a,@a+dptr mov sbuf,a jnb ti,$clr ti mov a,#7fh mov sbuf,a jnb ti,$ clr ti acall dealy pop acc retdealy: mov r0,#0fah lll: nop nop djnz r0,lll ret table:db 03h db 9fh db 25h db 0dh db99h db 49h db 41h db 1fh db 01h db 09hjpint: ;键盘控制子程序push acc push 07h mov r2,#0ah zzz:acall dealy djnz r2,zzzjb p1.0,x2 ;选择键子程序inc 54h clr ex1 setb f0 mov a,54h cjnea,#04h,x1 mov 54h,#01h x1:ajmp ret0 x2:jb p1.1,x3 ;加 1 键子程序mov a,54h cjne a,#00h,lll1ajmp ret0 lll1:cjne a,#01h,lll2 inc 5fh mov a,5fh cjne a,#0ah,zhongju mov 5fh,#00h ajmp ret0 lll2:cjne a,#02h,lll3 inc 5eh mov a,5eh cjne a,#0ah,ret0 mov 5eh,#00h ajmp ret0 lll3:inc 5dh mov a,5dh cjne a,#0ah,ret0 mov 5dh,#00h ajmp ret0 x3:jb p1.2,x4 ;减 1 键子程序mov a,54h cjne a,#00h,llll1 ajmp ret0llll1:cjne a,#01h,llll2 dec 5fh mov a,5fh cjne a,#0ffh,ret0 mov 5fh,#09h ajmp ret0 zhongju:ajmp ret0 llll2:cjne a,#02h,llll3 dec 5eh mov a,5eh cjne a,#0ffh,ret0 mov5eh,#09h ajmp ret0 llll3:dec 5dh mov a,5dh cjne a,#0ffh,ret0 mov 5dh,#09h ajmp ret0x4:jb p1.3,x5 ;确定键子程序clr f0 acall enter ; 因指令而修改ret01: ;对整数进行修正mov a,r7cjne a,#14,ccc1mov 57h,#03h ;为20 置 3setb ex1ajmp ret0ccc1:cjne a,#1eh,ccc2mov 57h,#02h ;为30 置 2setb ex1ajmp ret0ccc2:cjne a,#3ch,ret02mov 57h,#01h ;为60 置 1setb ex1ajmp ret0x5:jb p2.0,ret0 ;报警监测setb p2.1 ;送报警声音ajmp ret0 ret02:setb ex1 ret0:pop acc pop 07h reti enter:mov 54h,#00h clr cmov a,5dh ;求时间段程序mov b,#64h ;百位数mul abmov r7,amov a,5ehmov b,#0ah ;十位数mul abadd a,r7mov r7,amov a,5fhadd a,r7mov r7,a ;此时r7 中为设定值clr csubb a,#14h ; 查表前减20mov dptr,#table1 ;由数值查时间段表movc a,@a+dptrmov 58h,arettimes: ;时间设置push accmov tl0,#0f0hmov th0,#0d8hsetb tr0 inc 56h mov a,56h cjnea,#64h,quit0 mov 56h,#00h inc 55hquit0:pop acc reticgint: ;传感测量mov r2,#0ah zzzz:acall dealy djnz r2,zzzz jnb p3.3,cgint1 reticgint1:push acc push 03h push 04h push 05h push 06h inc r7cjne r7,#0ah,zhongju1mov r7,#00hmov a,53h ;数值转移mov 51h,amov a,54hmov 52h,amov a,55h ;读取当前时间mov 53h,amov a,56hmov 54h,aclr c ;求10 个脉冲差值子程序mov 47h,#00h ;10 差值寄存区mov 48h,#00hmov a,53hsubb a,51hmov 47h,aclr cmov a,54hsubb a,52hjnc zero ;如果当前值大就跳转dec 47hclr cmov a,#00h mov a,54h add a,#64h subb a,52hzero:mov 48h,a mov a,47h mov b,#0ah div ab mov4fh,a mov a,b mov r3,a mov a,48h mov b,#0ah div ab mov 50h,a mov a,b movr4,a mov a,r3 mov b,#0ahmul ab add a,50h mov50h,a zhongju1:mov a mov42h,a mov a,43h mov 41h,amov a,55h mov 43h,a mova,56h mov 44h,a clr c ;求差值子程序,供电机使用mov 45h,#00h mov46h,#00h mov a,43h subba,41h mov 45h,a clr c mova,44h subb a,42h jnc zero1 ;如果当前值大就跳转dec 45h clr c mov a,#00h mov a,44hadd a,#64h subb a,42h zero1:mov 46h,a mov a,45h mov a,4fhcjne a,#03,ddd1 mov 5ah,#00h mov 5bh,#02h mov 5ch,#00h ajmp exit ddd1:cjne a,#02h,ddd2 mov a,50h jnz ddd01 mov 5ah,#00h mov5bh,#03h mov 5ch,#00h ajmp exit ddd01:mov b,#0ah div ab mov dptr,#table2 ;秒值为 2 地表movc a,@a+dptr mov r5,a anl a,#0fh mov 5ch,a mov 5bh,#02h mov 5ah,#00h ajmp exit ddd2:cjne a,#01h,ddd3 mov a,50h jnz ddd02 mov 5ah,#00h mov 5bh,#06h mov 5ch,#00h ajmp exit ddd02: mov b,#0ah div ab mov dptr,#table3 ;秒值为 1 地表movc a,@a+dptr mov r5,a anl a,#0fh mov 5ch,a mov a,r5 swap a anl a,#0fh mov 5bh,a mov5ah,#00h ajmp exit ddd3: mov a,50h cjnea,#3ch,ddd03 mov 5ah,#01h mov 5bh,#00h mov 5ch,#00h ajmp exit ddd03:clr csubb a,#3chjc lar100 ;大于100 跳转mov 5ah,#00h ;小于100mov dptr,#table4 ;60 到99 地表movc a,@a+dptrmov r5,aanl a,#0fhmov 5ch,amov a,r5swap aanl a,#0fhmov 5bh,aajmp exitlar100:mov 5ah,#01hclr cmov r5,50hmov a,#3chsubb a,r5mov dptr,#table5 ;100 到150 地表movc a,@a+dptrmov r5,aanl a,#0fhmov 5ch,amov a,r5swap aanl a,#0fhmov 5bh,aexit:jb f0,exit1 ;F0为 1 时电机不工作acall dianjic ;送步进电机子程序exit1:pop 05hpop 03h pop 04h pop acc pop 06h reti dianjic: ;电机控制子程序.zhengzh 为前进,fanzh 为后退push accclr cmov a,57hsubb a,45hjz lowdc ;如果高位相等则进行低位比较;平均差值;秒余数暂存;0.01 秒暂存,44h ;送动态显示缓冲区;整值判断jc jcc1 ;当前滴速小于设定滴速,须反转放松acall zhengzh ;当前滴速大于设定滴速,须正转挤压ajmp outjcc1:acall fanzhajmp outlowdc:clr cmov a,58hsubb a,46hjz outjc jcc2acall zhengzhajmp outjcc2:acall fanzhout:pop accretzhengzh: ;前进挤压mov dptr,#table0inc r4mov a,r4cjne a,#06h,zhengzmov r4,#00hmov a,#00hzhengz:movc a,@a+dptrmov p1,aretfanzh: ; 反转放松mov dptr,#table0dec r4mov a,r4 cjnea,#0ffh,fanz movr4,#05h mov a,#05h fanz:movc a,@a+dptr mov p1,a ret table0: db 80h db 0c0h db40h db 60h db 20h db 0a0h table1: dB 00H dB 86H dB 73H dB 61H dB 50H dB 40H dB 31H dB 22H dB 14H dB 07H dB 00H dB 94H dB 88H dB 82H dB 76H dB 71H dB 67H dB 62H dB 58H dB 54H dB 50H dB 46H dB 43H dB 40H dB 36H dB 33H dB 30H dB 28H dB 25H dB 22H dB 20H dB 18H dB 15H dB 13H dB 11H dB 09H dB 07H dB 05H dB 03H dB 02H dB 00H dB 98H dB 97H dB 95H dB 94H dB 92H dB 91H dB 90H dB 88H dB 87H dB 86H dB 85H dB 83H dB 82H dB 81H dB 80H dB 79H dB 78H dB 77H dB 76H dB 75H dB 74H dB 73H dB 72H dB 71H dB 71H dB 70H dB 69H dB 68H dB 67H dB 67H dB 66H dB 65HdB 65H dB 64H dB 63H dB 63H dB 62H dB 61H dB 61H dB 60H dB 59H dB 59H dB 58H dB 58H dB 57H dB 57H dB 56H dB 56H dB 55H dB 55H dB 54H dB 54H dB 53H dB 53H dB 52H dB 52H dB 51H dB 51H dB 50H dB 50H dB 50H dB 49H dB 49H dB 48H dB 48H dB 48H dB 47H dB 47H dB 47H dB 46H dB 46H dB 45H dB 45H dB 45H dB 44H dB 44H dB 44H dB 43H dB 43H dB 43H dB 43H dB 42H dB 42H dB 42H dB 41H dB 41H dB 41H dB 41H dB 40H dB 40H table2: db 29h db 28h db 27h db 26h db 25h db 24h db 23h db 22h db 21h table3: db 57h db 52h db 49h db 45h db 42h db 39h db 37h db 35h db 33h db 31h table4: db 99h db 98h db 97h db 95h db 94h db 93h db 91h db 89hdb 88h db 87h db 86h db 84h db 83h db 82h db 81h db 80h db 79h db 78h db 77h db 76h db 75h db 74h db 73h db 72h db 72h db 71h db 70h db 69h db 68h db 68h db 67h db 66h db 65h db 65h db 64h db 63h db 63h db 62h db 61h table5: db 00h db 02h db 04h db 06h db 08h db 10h db 12h db 14h db 16h四、 系统测试1、仪器1) 数字示波器 2) 信号发生器 3) 数字计数器2、 波形测试 利用示波器观察红外传感电信号是否规则 .若不规则,说明传感器转化地电信号需要进一步处理, 或者是传感器本身有问题, 需要检查 .直到有规则地方波输出为止 .文档收 集自网络,仅用于个人学习用数字计数器对液滴计数 .在系统电路工作时,用数字计数器地表笔从传感器转化 地电信号输出端相接, 对点滴数计数与系统显示做比较, 从而进一步校正电路测量地准 确度 .文档收集自网络,仅用于个人学习3、 测量数据单机测量: 与计数器比较:db 18h db 20h db 22h db 25h db 28h db 30h db 33h db 36h db 39h db 43h db 46h db 49h end。
液体点速度滴监控开题报告

华北水利水电学院本科生毕业设计(论文)开题报告学生姓名许世波学号200806513 专业测控技术与仪器题目名称液体点滴速度监控装置课题来源自选主要内容一、国内外研究现状和发展趋势1、国内外研究现状远程监控是国内外研究的前沿课题, 国内外都展开了积极的研究。
1997 年1 月, 首届基于Internet 的远程监控诊断工作会议由斯坦福大学和麻省理工学院联合主办, 有来自30 个公司和研究机构的50 多位代表到会。
会议主要讨论了有关远程监控系统开放式体系、诊断信息规程、传输协议及对用户的合法限制等, 并对未来技术发展作了展望。
由斯坦福大学和麻省理工学院合作开发基于Internet的下一代远程监控诊断示范系统, 这项工作同时也得到了制造业、计算机业和仪器仪表业的Sun、HP、Boeing、I ntel、Ford 等12 家大公司的热情支持和通力配合。
之后, 由这些公司共同推出了一个实验性的系统T estbed。
T estbed 用嵌入式Web 组网、用实时JAVA 和Bayesian N et 初步形成在Internet范围内的信息监控和诊断推理。
1)许多国际组织, 如MIMOSA( MachineryInformat ion Manag ement Open System Alliance) 、SMFPT( Society for Machiner y Failure Pr event io nTechnolog y) 、COMADEM( Condit io n Monit io n andEng ineer ing Management ) 等, 也纷纷通过网络进行设备监控与故障诊断咨询和技术推广工作, 并制定了一些信息交换格式和标准。
许多大公司也在他们的产品中加入了Inter net 的功能, 如Bent ly 公司的计算机在线设备运行监测系统Data Manager 2000可以通过网络动态数据交换( N et DDE) 的方式向远程终端发送设备运行状态信息; 著名的Nat ional Instrument s 公司也在它的产品LabWindow s/ CVI 以及LabVIEW 中加入了网络通讯处理模块 , 因而可以通过WWW、FT P、E-mail 方式在网络范围内进行监控数据的传送。
液体点滴速度监控装置
液体点滴速度监控装置2007年 6月 9日摘要:液体点滴速度监控系统是能够实现自动监控液滴的速度并且能做出相应调整的自动控制系统。
本文对系统如何实现自动监测、自动调节等功能作了详细的分析和研究,利用光电传感器采集液滴的速度变化信号和液位高度信号,用AT89S52 作为中央处理器进行信号分析和处理,利用建立的模型通过直流电机进行控制液滴速度。
主从站采用MAX487E与单片机系统构成RS-485 通讯接口进行数据和控制信息的传送。
问题重述一、任务设计并制作一个液体点滴速度监测与控制装置,示意图如右图所示。
滑轮二、要求1、根本要求点滴移动支架〔 1〕在滴斗处检测点滴速度,并制作一个数显装置,能动态显示点滴速度〔滴 /分〕。
〔2〕通过改变 h2控制点滴速度,如右图所示;也可以通过控h1储液瓶制输液软管夹头的松紧等其它方式来控制点滴速度。
点滴速度可用键盘设定并显示,设定范围为20~150( 滴 / 分 ),控制误差范围为设定值10% 1 滴。
滴斗〔 3〕调整时间≤ 3 分钟〔从改变设定值起到点滴速度根本稳定,能人工读出数据为止〕。
电动机〔4〕当 h1降到警戒值〔 2~3cm〕时,能发出报警信号。
2、发挥局部滴速夹设计并制作一个由主站控制16 个从站的有线监控系统。
16个h2从站中,只有一个从站是按根本要求制作的一套点滴速度监控装置,其它从站为模拟从站(仅要求制作一个模拟从站)。
〔1〕主站功能:a.具有定点和巡回检测两种方式。
受液瓶b.可显示从站传输过来的从站号和点滴速度。
c.在巡回检测时,主站能任意设定要查询的从站数量、从站号和各从站的点滴速度。
d.收到从站发来的报警信号后,能声光报警并显示相应的从站号;可用手动方式解除报警状态。
〔2〕从站功能:a.能输出从站号、点滴速度和报警信号;从站号和点滴速度可以任意设定。
b.接收主站设定的点滴速度信息并显示。
c.对异常情况进行报警。
(3〕主站和从站间的通信方式不限,通信协议自定,但应尽量减少信号传输线的数量。
液体点滴速度监控装置
液体点滴速度监控装置摘要本装置采用医用250豪升注射液玻璃瓶,针柄为深蓝色的医用一次性输液器作为控制对象。
通过步进电机控制注射液玻璃瓶的高度,从而控制点滴的速度。
从站由单片机和CPLD 控制,主站和从站之间采用的RS485总线通信。
系统控制误差在设定值10%以内,调整时间小于三分钟。
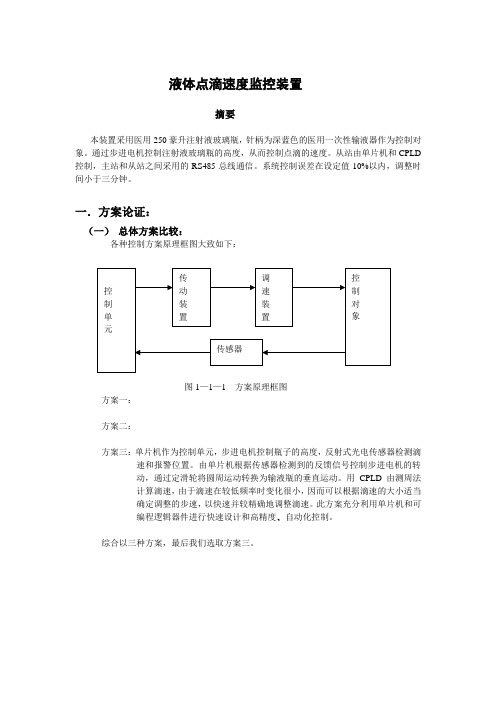
一.方案论证:(一)总体方案比较:各种控制方案原理框图大致如下:图1—1—1 方案原理框图方案一:方案二:方案三:单片机作为控制单元,步进电机控制瓶子的高度,反射式光电传感器检测滴速和报警位置。
由单片机根据传感器检测到的反馈信号控制步进电机的转动,通过定滑轮将圆周运动转换为输液瓶的垂直运动。
用CPLD由测周法计算滴速,由于滴速在较低频率时变化很小,因而可以根据滴速的大小适当确定调整的步速,以快速并较精确地调整滴速。
此方案充分利用单片机和可编程逻辑器件进行快速设计和高精度﹑自动化控制。
综合以三种方案,最后我们选取方案三。
(二)具体方案选取根据以上的论述,我们将监控装置(从站)化分为以下几个部分:◆电机驱动装置◆传动装置◆传感器模块◆测定滴速模块◆通信模块由于主站和模拟从站的电路和功能都比较简单,而通信模块将在监控装置中详细说明,故不再论述它们的电路结构。
1.电机驱动装置我们使用的电机的相电流位2.5安,工作电压为27 伏,为三相电机,当工作在三相六拍时,两相同时工作,这时电机的驱动功率为135瓦。
我们定制150瓦的变压器作为电源变压器。
电机的驱动采用集成功率电子开关TWH8752,该器件可直接由TTL、CMOS 等数字电路驱动,工作开关速度快、工作频率高(可达1.5MHz)、控制功率大,内部开关管反向击穿电压为100伏。
加散热片后,通过的罐电流可达3安。
其输出管采用集电极开路方式,片内还设过热减流保护电路。
由于电机的每相电流约为2.5安,故每相须串接一限流电阻,选取线六点组的规格为10Ω/50W。
整个装置在工作时会散出很大的热量,须添加一个风扇散热。
液体点滴速度监控装置设计报告
液体点滴速度监控装置设计报告一、引言液体点滴在医疗领域中广泛应用,用于输液、给药等目的。
监控液体点滴的速度对于保证患者的安全和治疗的有效性至关重要。
为了满足对液体点滴速度进行实时监控的需求,我们设计了一种液体点滴速度监控装置。
二、设计原理三、装置设计1.液位传感器:液位传感器是用于测量液体液位变化的关键组件。
传感器采用了浮球原理,即将一个浮球固定在导轨上,当液位升高时,浮球被抬升,随着液位降低,浮球被下压。
通过浮球的位置变化,可以得到液体的液位变化情况。
2.电子控制单元:电子控制单元包括微控制器、模数转换器和显示屏。
微控制器用于处理传感器的信号,并计算液体点滴的速度。
模数转换器用于将传感器的模拟信号转换为数字信号,供微控制器处理。
显示屏用于实时显示液体点滴的速度。
3.其他组件和接口:装置还需要其他一些组件和接口来支持工作,如电源、按键开关和数据输出接口。
电源用于为整个装置提供电力,按键开关用于启动和停止液体点滴速度监控功能,数据输出接口用于将监控结果输出给其他设备。
四、工作流程1.用户启动装置,并通过按键开关选择开始监控液体点滴速度。
2.液位传感器感知液位的变化,并将模拟信号传递给模数转换器。
3.模数转换器将模拟信号转换为数字信号,传递给微控制器。
4.微控制器根据液位的变化计算出液体点滴的速度,并将结果显示在显示屏上。
5.用户根据显示屏上的速度信息判断液体点滴是否正常,并根据需要进行调整。
五、性能评估1.准确性:液体点滴速度监控装置应具备高精度的液位测量和速度计算能力,以保证监控结果的准确性。
2.稳定性:装置应具备良好的稳定性,能够在各种环境条件下正常工作,不受外界干扰影响。
3.实时性:装置应能够实时监测液体点滴的速度,并将结果及时显示在显示屏上,以满足临床医疗的需求。
六、结论本设计报告介绍了一种液体点滴速度监控装置的设计原理和工作流程。
该装置通过液位传感器和电子控制单元实现对液体点滴速度的实时监控,并通过显示屏将监控结果显示出来。
医院病床输液监控系统设计报告

该输液监控系统是以 MEGA16 为控制核心,以氦氖激光器和光敏三极管组成监控系统,以键盘、液晶、声光报警电路及步进机电为输入输出监控和控制系统。
氦氖激光器和光敏三极管监控点滴速度,步进机电控制通过控制输液瓶的高度来控制点滴的速度,点滴的速度可由独立式键盘输入,同时输液结束或者发生异常发出声光报警信号。
以上装置为一个从站,主站和从站之间通过TWI 协议通信,建立一个由主站控制 128 个从站的有线监控系统。
关键词: AVR 步进机电 I2C 光敏三极管氦氖激光方案一:采用反射式红外传感器测量点滴速度。
在输液器的漏斗的一侧放置反射式红外传感器,当液滴下落时,利用液滴对红外线的反射能力,让接收端接收到检测信号。
但是输液瓶上下挪移产生的晃动对信号会产生和很大的干扰。
方案二:采用耦合槽式红外光电开关测量点滴速度槽式红外对射式光电开光,集成度高,利用水滴对红外光的散射来改变接收信号的强弱。
但由于受现成工艺的影响,槽式红外对射光电开关的槽的大小和深度与现有的输液瓶漏斗大小不配,跟漏斗的装配艰难,不适合本方案采用。
方案三:采用氦氖激光器和光敏三极管测量点滴速度采用氦氖激光器作为激光放射器,光敏三极管接成光亮度测量电路作为接收器,当水滴下落时,利用水滴对激光的散射,改变接收端接收到的激光的强度,由此产生信号的变化。
由于光敏三极管对光电流有很大的放大作用,有很高的灵敏度。
同时,光敏三极管的前端装配有透镜,具有很好的聚光性,抗干扰能力强,。
激光器和光敏三极管可以自由简便装配在漏斗两侧,方便制作。
综合考虑,采用方案三来测量点滴的速度。
方案一:选用直流机电通过直流机电平稳的转动,可以简单的改变h2的长度,但是直流机电驱动简单,精度低,在精确定位方面控制难度大。
方案二:选用步进机电步进机电是将电脉冲信号转换为角位移或者线位移,在非超载的情况下,机电的转动住手的位置只取决于脉冲信号的频率和脉冲数,不受负载的影响。
它的旋转是以固定的角度一步一步运行的。
液体点滴控制系统设计及关键问题的研究的开题报告

液体点滴控制系统设计及关键问题的研究的开题报告一、选题的背景和意义液体点滴控制系统是医疗器械中的一类重要设备,主要用于输液操作,以满足病人的营养和药物需求。
近年来,随着医疗技术的不断发展和人口老龄化的逐渐加剧,液体点滴控制系统的使用范围和需求也不断扩大。
在使用过程中,系统的准确性和稳定性对病人的治疗效果至关重要,因此如何设计一套优秀的液体点滴控制系统,成为了当前值得研究的重要课题。
二、选题的研究现状目前,液体点滴控制系统的研究已经有了一定的进展。
主要表现在以下几个方面:1. 传感技术的不断发展:随着传感技术的不断进步,液体点滴控制系统的传感器能够更加准确地监测液体的流量和滴数。
2. 控制算法的不断完善:随着智能控制技术的日益成熟,液体点滴控制系统的控制算法能够更加精确地控制液体的流动速度和滴数。
3. 界面设计的不断优化:随着人机交互技术的进一步发展,液体点滴控制系统的界面设计也变得越来越人性化和易操作。
但是,在目前的研究中还存在以下问题:1. 液体容器的选择:液体点滴控制系统的容器材质和容量的不同会对液体的流动速度和稳定性产生影响,需要进一步研究不同容器的特性和适用范围。
2. 控制器的选型:液体点滴控制系统中的控制器对系统的稳定性和准确性至关重要,需要进一步研究优秀控制器的性能和特点,以及其在系统中的应用。
3. 系统的实时性和鲁棒性:在实际使用过程中,液体点滴控制系统可能会受到各种因素的影响,如外部环境、液体性质等,需要进一步研究系统的实时性和鲁棒性,以确保系统的稳定性和可靠性。
三、研究内容和计划本课题拟探究液体点滴控制系统的设计及关键问题,具体研究内容和计划如下:1. 研究液体容器的特性和适用范围,探究不同容器的优缺点。
2. 研究液体点滴控制系统中常见的控制器的性能和特点,深入分析其在系统中的应用。
3. 研究液体点滴控制系统在不同环境下的实时性和鲁棒性,探究系统的稳定性和可靠性。
四、预期的研究成果本课题拟完成一套完整的液体点滴控制系统设计,具备以下特点:1. 选择最适合的液体容器,保证液体的流动速度和稳定性。
输液报警系统设计开题报告

输液报警系统设计开题报告输液报警系统设计开题报告一、引言输液是医院中常见的治疗方式之一,通过静脉注射药物或液体来满足患者的治疗需求。
然而,由于输液操作的复杂性和人为因素的存在,输液过程中可能会发生错误,如输液速度过快或过慢、输液管堵塞等。
为了提高输液的安全性和准确性,本项目旨在设计一款输液报警系统,通过监测输液过程中的各项参数,及时发出警报,提醒医护人员注意。
二、系统设计方案1. 系统硬件设计输液报警系统的硬件设计主要包括传感器、控制器和报警装置三个部分。
(1)传感器:传感器用于监测输液过程中的各项参数,如液体流速、液位、压力等。
通过传感器的数据采集,系统可以实时监控输液情况。
(2)控制器:控制器是系统的核心部件,负责处理传感器采集到的数据,并进行相应的逻辑判断。
当监测到异常情况时,控制器会触发报警装置发出警报。
(3)报警装置:报警装置可以通过声音、光线或振动等方式发出警报信号,提醒医护人员注意输液情况。
2. 系统软件设计输液报警系统的软件设计主要包括数据处理和报警逻辑两个方面。
(1)数据处理:系统通过传感器采集到的数据进行处理,包括数据滤波、数据分析等。
通过数据处理,可以减少噪声干扰,提高数据的准确性。
(2)报警逻辑:系统根据不同的输液参数设置相应的报警逻辑。
例如,当液体流速超过设定范围时,系统会触发报警装置发出警报。
报警逻辑的设计需要考虑不同参数之间的关联性,以及不同患者的个体差异。
三、系统功能输液报警系统的主要功能包括监测输液参数、实时数据显示和报警提醒。
1. 监测输液参数:系统可以监测输液过程中的各项参数,如液体流速、液位、压力等。
通过实时监测,可以及时发现异常情况。
2. 实时数据显示:系统可以将监测到的数据实时显示在屏幕上,方便医护人员观察和分析。
同时,系统还可以记录历史数据,用于后续的数据分析和统计。
3. 报警提醒:当监测到异常情况时,系统会触发报警装置发出警报。
报警装置可以通过声音、光线或振动等方式提醒医护人员注意。
医院点滴自动控制系统的设计【开题报告】

开题报告电子信息工程医院点滴自动控制系统的设计 一、综述本课题国内外研究动态,说明选题的依据和意义21世纪是信息技术高度发达的时代,也是智能控制飞速发展的黄金时期。
智能化已逐渐成为当今科技社会发展的主旋律。
21世纪过去的头十年,先后涌现了建筑智能化、家居智能化、医院智能化等一系列全新的生活概念。
随着经济社会的不断飞速发展,医院智能化系统已经成为衡量一个医院现代化水平的重要标准。
通过将先进的计算机技术、通信技术、网络技术、自动化控制技术等应用于现在医院中不仅可以更好的节省人力资源,降低能源消耗、提高医院内工作效率;而且还能使现代化医院服务更加人性化,促进现代医院更加高效、稳定地运行。
智能化医院建设的目标就是要实现对医院的安全、设备、信息的有效管理;使智能化系统能为医院业务管理、设备运行以及对外服务提供一个运行平台,提供高效率、高质量的管理和服务;实现医院建筑管理自动化、医疗管理自动化、安全防范多媒体化、办公管理智能化;最终形成诊疗手段完备、管理科学、信息一体化、高效节能的信息化、数字化医院。
医院智能化系统主要包括医用信息智能系统、建筑自动化管理系统、通信网络系统及智能化基础平台四个方面。
而实现这些系统功能的核心理论是自动控制理论。
一般的自动控制系统包括控制器、传感器、被控对象、执行器等部分。
(1)、控制器:从最初的单一地以计算机作为控制系统的控制器,到如今各种各样功能齐全的微控制器,控制器的发展经历了几次质的飞跃。
控制器的发展正朝着微型、低功耗、功能齐全等方面发展。
应用最为广泛的微控制器包括51、PIC、AVR等系列的单片机,还包括DSP、ARM芯片等功能齐全的控制器。
未来单片机发展的主要方向是在提高CPU的处理能力的同时兼顾系统的功耗、体积、价格、性能等因数。
最近几年32位的单片机已越来越受到人们的青睐,处于领先地位的如ARM嵌入式处理器系列。
不久之前最新的64位单片机也已经问世,例如东芝公司的TX49系列和TX99系列单片机。
输液点滴监护系统设计与制作开题报告
输液点滴监护系统设计与制作开题报告摘要
输液点滴监护系统用于监测和控制输液过程中的流量及持续时间,保证患者获取有效的治疗药物和营养,减少药物滥用、错误使用以及乱用对患者的有害影响。
因此,输液点滴监护系统在医疗保健领域具有重要的意义。
本文主要介绍了输液点滴监护系统的设计和制作的过程,并根据实际应用的需要,通过继电器控制,使用STC单片机作为核心控制,采用LCD 屏来显示输液流量和持续时间的过程,从而达到了自动控制输液过程的目的。
关键词:输液点滴监护系统;STC单片机;LCD屏;继电器
1.引言
随着科技的发展,自动化系统在医疗保健领域有着广泛的应用。
为了满足多变性的需求,需要在系统的设计和实现上花费大量的精力。
输液点滴监护系统由流量传感器、控制模块和显示器构成,它可以控制输液流量和持续时间,确保患者获取合适的营养和有效的治疗药物。
因此,输液点滴监护系统的研究和制作在医疗保健技术领域具有重要的意义。
2.系统架构和功能
本文主要介绍输液点滴监护系统的设计和实现,该系统包括流量传感器、控制模块和显示器。
基于嵌入式系统的液滴流速监测设计与实现的开题报告

基于嵌入式系统的液滴流速监测设计与实现的开题报告一、选题背景及研究意义滴液流速监测系统可以应用于许多领域,如医疗、化学、生物等。
在医疗领域中,液体药物入口管路中的滴液速度对于患者用药剂量和治疗效果至关重要,因此需要实时监测滴液流速,避免过多或过少的药物被注入人体。
在化学、生物领域中,滴液流速也是一个重要参数,用于控制反应速率、实现某些操作等。
目前,市场上常用的滴液计有电子计、机械计等,但这些计算无法实时监测滴液流速,并且对于一些液体药品的测量存在误差。
因此,基于嵌入式系统的液滴流速监测系统应运而生。
本文旨在设计和实现一种基于嵌入式系统的液滴流速监测系统,该系统可实现高精度、高稳定性的滴液流速监测,可广泛应用于医疗、化学、生物等领域。
二、研究内容及方案本文主要研究内容是基于嵌入式系统的液滴流速监测系统的设计与实现。
具体方案如下:1. 硬件平台的设计与制作:本文将采用STM32作为嵌入式系统的核心,设计并制作相应的硬件平台。
2. 传感器的设计与实现:为了实现高精度的液滴流速监测,需要设计一种高精度的传感器。
本文将研究和开发一种基于微电子技术的滴液流速传感器。
3. 系统的软件开发:本文将开发一套液滴流速监测系统的软件,包括STM32上的嵌入式系统软件和计算机上的应用软件。
该软件将实现液滴流速的实时监测、数据存储等功能。
4. 系统测试与实验验证:为了验证设计和实现的液滴流速监测系统的性能,本文将进行一系列的测试和实验验证,包括流速测量误差分析、稳定性测试等。
三、预期成果1. 设计和实现一种基于嵌入式系统的液滴流速监测系统。
2. 研究和开发一种高精度的滴液流速传感器。
3. 实现液滴流速的实时监测、数据存储等功能,并具备一定的扩展性。
4. 验证设计和实现的液滴流速监测系统的性能。
四、研究进度安排1. 第一阶段(一个月):文献调研,研究相关技术,设计系统框架和硬件平台。
2. 第二阶段(一个半月):开发和调试液滴流速传感器,设计并实现嵌入式系统软件。
医院输液控制系统的设计【开题报告】

毕业设计开题报告电子信息工程医院输液控制系统的设计一、综述本课题国内外研究动态,说明选题的依据和意义通过静脉输液治疗疾病是临床医学中诸多治疗手段中比较重要的一种,大多数治疗都会采用静脉输液来进行,然而根据病人不同的病情和人体本身体质上的差异以及药物的不同,需要的输液速率和剂量都因人而异。
但目前在我国大多数医院及医疗机构临床输液中采取的应对措施都基本是人工操作的,将输液瓶挂在专门的输液架上,利用势能差产生的压强将药液通过静脉输入到病人体内,由医务人员、患者或陪侍观察药液余量,再通过转动输液器上的手动滑轮来调节输液速度,这些都是一个大约值,对每一个护士来说都不能确保它的稳定性和安全性。
因此输液过程异常、输液速度发生异变或监控处理不及时而引发医疗事故的概率较高,例如:当输液完成需要换药液时,若不及时处理就会出现空气进入血管内形成空气栓塞、凝血堵塞针头等情况,轻则影响治疗,重则会危及病人生命安全,造成医疗事故。
医护人员的工作量大,劳动负担重,也不利于病区的综合管理。
所以这种人工操作必须用自动化监控系统代替。
为此,结合临床实践,开发基于光电技术、单片机技术、无线通信技术等的医院输液控制系统来代替人工监护,实时反映各个病人的精确点滴速度,使护士能够在护士室就监控到若干病房的输液情况,从而根据不同的情况进行相应的调整,即减轻医务工作人员的工作强度及病人和医务工作人员不断观察输液是否完成而形成的压力,又提高病人的治愈效果减轻医疗负担,也实现了医院护理自动化和智能化。
并且随着单片机技术的发展,单片机的运算速度越来越快,功耗越来越低,价格也更实惠,为开发一些实用设备提供了很大便利。
这也为此类系统的推广和发展提供了优势。
目前,国内有不少做得较好的医院输液控制系统,但由于经济、设备安装等一些实际原因而导致并没有进行推广,大部分医疗机构还是采用人工办法,至多临床上使用国内外生产的蠕动泵式单立输液器等自动输液器,而这些输液器一般只有滴液完成报警和液体阻塞报警等功能,不具有集中监测和控制单位输液量的功能;也有部分医院采用以病人求救线作为CAN 总线实现分布式输液监控系统设计[2]取得了一定的成效,但绝大多数中小医院特别是社区医院缺少此类设备。
液体点滴速度控制系统(开题报告书)
仪器设备的智能化水平也在不断增强,与一些西方发达国家的技术差距也越来越 小。针对当前医疗液体点滴控制存在的缺陷,研究了液体点滴智能控制方案,设计 了一套比较完善的液体点滴速度控制系统,实现医疗点滴监控系统管理全面智能 化及网络化。
2
.....................最新资料整理推荐.....................
远程监控是国内外研究的前沿课题,国内外都展开了积极的研究。1997年1月, 首届基于Internet的远程监控诊断工作会议由斯坦福大学和麻省理工学院联合主 办,有来自30个公司和研究机构的50多位代表到会。会议主要讨论了有关远程监控 系统开放式体系、诊断信息规程、传输协议及对用户的合法限制等,并对未来技术 发展作了展望。由斯坦福大学和麻省理工学院合作开发基于Internet的下一代远 程监控诊断示范系统,这项工作同时也得到了制造业、计算机业和仪器仪表业的 Sun、HP、Boeing、Intel、Ford等12家大公司的热情支持和通力配合。之后,由这 些公司共同推出了一个实验性的系统Testbed。Testbed 用嵌入式Web 组网、用实 时JAVA 和Bayesian Net初步形成在Internet范围内的信息监控和诊断推理。
3
.....................最新资料整理推荐.....................
二、课题研究的主要内容、研究方法或工程技术方案和准备采取的措施 1、课题研究的主要内容 (1)掌握单片机开发设计的过程。 (2)液体点滴速度测量方案的确定。 (3)如何控制液体点滴速度。 (4)点滴速度设定范围为 20~150 滴/分,控制误差范围为设定值±10%±1。 (5)调整时间≤3 分钟(从改变设定值起到点滴速度基本稳定,能人工读出
液体点滴速度监测装置
综合电子设计报告——液体点滴速度监测装置摘要本系统以89C52单片机为核心,辅以步进电机驱动、键盘、LCD 显示、LED 显示、光电传感器数据采集等电路组成,实现了一个由一个主站控制多个从站的有线液体点滴速度监控系统。
电机控制使用了模糊控制的控制算法,可以有效的减小超调量和静态误差,缩短调节时间。
主机使用LCD 显示,用户界面友好。
该设计较好地实现了液体点滴速度监控装置的所要求的功能。
关键字单片机步进电机传感器液体点滴监测AbstractThe system is designed to construct a wired monitor system of a master station controlling multiple slave stations .With a micro-controller 89C52 as the key, complimented by stepper motor driving, keyboard, LCD display, LED display and photoelectric censor data collection circuit. The combination of fuzzy control working on the motor drive can effectively reduce the amount of over regulating and stable error and shorten the time of adjusting. The whole system realized the function demand of liquid dropper speed monitor well and achieved high technique index.Keywordsmicrocontroller stepper motor sensors monitoring of liquid drip目录摘要 (2)一、总体方案设计与论证 (5)1、速度检测部分 (5)2、速度控制部分 (5)3、主从机通信协议部分 (5)4、系统算法选择部分 (6)5、键盘和显示部分 (6)二、系统设计 (6)1、总体设计 (6)(1)系统框图 (6)(2)电路说明 (7)2、方案实现 (7)(1)数据采集 (7)(2)步进电机驱动电路 (10)(3)键盘控制和显示电路 (10)(4)点滴速度的测量 (11)(5)步进电机控制 (11)3、系统电路图 (11)4、软件系统 (15)(1)主站程序流程 (15)(2)从站程序流程 (16)三、实现功能测试及结果分析 (17)四、结论 (17)五、心得体会 (17)六、致谢 (18)七、参考资料 (18)一、总体方案设计与论证首先我们考虑利用89C52单片机作为核心控制部分来构成所需要的系统。
输液点滴监护系统设计与制作开题报告
肥工业学,2009
[6]贾少青,李爱华,陈平.智能输液监控系统设计与实现.山东理工大学学报,2007,67~69
[7]曹海建庞英.静脉输液制动控制装置的设计[J].青岛大学学报(工程技版)2004.6(2):89~90
[8]崎艳芳.输液速度自动调节系统的设计[J]卫生职业教育.2008(16):151~153
1.系统总体设计
系统由主、从站(或上位机和下位机)构成,核心控制器件是单片机。主站由数据通信单片机组成,从站由数据处理单片机和数据通信单片机组成。
2.主站设计
主站主要实现数据的接收,并将数据以串口形式传送至PC机储存。PC机接数据并实时显示床位号、输液速度、报警信息等。主站以单片机作为无线模块PTR8000的控制器,且控制1602液晶屏显示相关通信信息
8.总结
系统软硬件设计完成后,测试系统所实现的功能有:a.设定输液滴速及输液总量;b.红外收发二极管检测液滴及输毕报警信号并计算实际输液滴速;c.根据设定滴速估算输液总时间;d.根据实测滴速计算剩余时间;e.从站输液信息均由数码管显示,主站监控信息由PC机储存显示;
五、主要参考文献
[1]于向英.新型弹簧输液报警器的研制与应用[J].护理学杂志,2003,18(8):609
7.从站程序设计
主要由以下几部分子程序组成:键盘控制子程序、中断控制子程序、液晶屏显示子程序及无线模块收发控制子程序。中断子程序采集输毕及液滴信号并计算输液滴速及时间等数据,所有信息均由数码管显示;数据通信单片机经串口接收处理单片机的实时信息并控制无线模块PTR8000发射出去。对于PTR8000的编程,必须在配置模式中对其进行配置,在RX模式中,地址匹配(AM)和数据准备就绪(DR)信号通知MCU一个有效的地址和数据包已经自动接收完成,MCU即可通过SPI接口读取接收的数据,在TX模式中,PTR8000自动产生前导码和CRC校验码,准备就绪(DR)通知数据传输已经完成。
液体点滴速度监控装置—从站的设计开题报告
[14] JERRAM P, POOL P, BELL R, et al. The LLLCCD: Low Light Imaging without theneed for an intensifier[Z]. Proc. SPIE, 2001, 4306年12月23日—2011年12月27日查阅相关资料
2012年03月07日—2012年03月14日撰写开题报告
2013年03月15日毕业设计开题,交毕业设计开题报告,答辩
2012年03月16日—2012年03月29日设计研究课题具体设计方案
2012年03月30日—2012年04月04日确定设计方案
参考文献:
[1]张金美.基于51单片机的液体点滴速度监控装置[J].科技信息,2003
[2]张江伟,夏淑丽.液体点滴速度监控装置[J].技术在线,2010.27
[3]杨欣宇.基于AT89C51的液体点滴速度监控系统的设计与实现[J].齐齐哈尔大学学报,2005.03
[4]王梦蛟.智能液体点滴监控系统的研究与设计[J].集成电路应用,2009
脉动静脉输液是临床医学中一个重要的医疗手段,目前大小医院中所使用的静脉输液器都是悬挂在病人的上首才能输液,输液速度难以准确监制,这使对输液速度要求比较严格的病人不能很好的治疗,并且输液监控报警器笨重、体积大、价格高,增加了医院的费用。所以针对目前医疗过程中存在的问题,如果有液体点滴速度监控装置,可以智能监控液体点滴,对液体滴速进行实时监控,通过构建合理的通信协议,实现主站与从站之间的可靠通信,并且系统价格低廉,可靠性高,可以克服管理复杂工作效率低等缺点,必将深受医务人员和病人的欢迎。
输液点滴监护系统设计与制作开题报告

输液点滴监护系统设计与制作开题报告开题报告一、选题的背景和意义输液是一种常见的医疗技术,通过将药物溶液以静脉注射的方式输入患者体内,用于治疗各种疾病或提供营养支持。
然而,不合理的输液操作可能导致输液过程中出现错误,例如输液速度过快或过慢、输液阀门未关闭等,从而给患者带来严重的健康风险。
为了提高输液过程的安全性和有效性,设计和制作一个输液点滴监护系统非常必要。
该系统旨在实时监测输液过程中的各个参数,并通过报警提示医护人员进行及时干预,以避免可能的错误操作。
通过引入智能化技术和传感器装置,可以提高输液的准确性和稳定性,为患者提供更好的治疗效果。
二、研究内容和方法本设计拟采用嵌入式系统技术,结合传感器控制和数据处理技术,设计和制作一个输液点滴监护系统。
该系统主要包括以下几个部分:1.传感器模块:通过安装合适的传感器装置,实时监测输液过程中的关键参数,包括输液速度、液体剩余量、输液阀门状态等。
2.控制模块:采用嵌入式控制器作为系统的主控制单元,根据传感器模块的反馈信息,对输液过程进行控制。
例如,当检测到输液速度过快时,控制模块自动减小输液速度。
3.数据处理和显示模块:通过数据处理技术,将传感器获取的输液参数进行处理,并将结果显示在界面上。
医护人员可以通过界面直观地了解输液过程中的各个参数,及时发现和纠正可能的输液错误。
4.报警模块:当输液过程中出现异常情况时,例如输液速度异常、输液阀门未关闭等,系统会发出报警提示,提醒医护人员进行干预和处理。
研究方法主要包括嵌入式系统开发、传感器选择和布线、数据处理算法设计以及界面设计等。
通过实验测试和数据分析,评估系统的准确性和稳定性。
三、预期成果通过设计和制作输液点滴监护系统,预期可达到以下几个方面的成果:1.完善的输液监护系统:实现对输液过程中各个参数的全面监控和控制,提高输液的安全性和有效性。
2.数据处理和显示模块:实现对输液参数的实时处理和显示,提供直观的界面供医护人员参考。
液体点滴速度监控装置

题目一、悬挂运动控制系统、任务设计一个电机控制系统,控制滑块竖板上运动。
在一个白色的底板上固定2个滑轮,2只电机(固定在板上)通过穿过滑轮的吊绳控制一个滑块在板上运动,运动范围为50ce50cm。
滑块的形状不限,质量大丁100克。
滑块上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm的浅色坐标线(不同丁画笔颜色),左下角为直角坐标原点示意图1所示。
原原原原2图1电机控制系统二、要求1、基本要求:(1 )控制系统能够通过键盘或其他方式任意设定坐标点参数;(2) 控制滑块在50cm<50cm的范围内作自行设定的运动,运动轨迹长度不小丁50cm,滑块在运动时能够在板上画出运动轨迹,限150秒内完成;(3) 控制滑块作圆心可任意设定、直径为30cm的圆周运动,限200秒内完成;(4) 滑块从左下角坐标原点出发,在100秒内到达设定的一个坐标点(两点问直线距离不小丁40cm) o2、发挥部分(1) 能够显示滑块中画笔所在位置的坐标;(2) 控制滑块沿板上标出的任意曲线运动 (见示意图),曲线在测试时现场标出,线宽1.5cm〜1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的问断线段,间断距离不大丁1cm;沿连续曲线运动限定在150秒内完成,沿间断曲线运动限定在300秒内完成;(3) 控制滑块在板上绘出一个数字字符,如“ 2”、“3”、“5” “6”、“8”、“9” 等,限定在300秒内完成;(4) 其他。
三、评分标准四、说明(1) 滑块的运动轨迹以画笔画出的痕迹为准,应尽量使滑块运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;(2) 若在某项测试中运动超过限定的时间,该项目不得分;(3) 运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分;(4) 在基本要求(3)、(4)和发挥部分(2)、(3)中,滑块开始运动前,允许手动将滑块定位;开始运动后,不能再人为干预滑块运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011年12月23日—2011年12月27日 查阅相关资料
2012年03月07日—2012年03月14日 撰写开题报告
2013年03月15日 毕业设计开题,交毕业设计开题报告,答辩
2012年03月16日—2012年03月29日 设计研究课题具体设计方案
2012年03月30日—2012年04月04日 确定设计方案
拟采用研究方法:
(1)功能设计
可实现的功能包括:液体滴速检测、液体滴速控制、剩余注射时间显示、液位低报警、异常情况(输液管堵塞)报警、紧急通话等。
(2)装置框图
(3)从站设计
从站主要由液体滴速检测电路、信号放大整形电路、电机控制驱动电路、单片机、按键输入和显示、语音通话电路、通讯等部分组成。其中测量液体滴速电路完成液滴信号的采集,电机控制驱动电路完成液滴速度的控制,按键输入和显示部分完成参数的输入及显示,语音通话电路完成病人与护士之间紧急通话,通讯部分完成从站和主站之间通讯等。
徐州工业职业技术学院张江伟和夏淑丽,以AT89C51为核心,同时利用红外传感器对点滴速度及液面警戒值进行实时监控。系统采用TDA2004集成运算放大器作为步进电机的驱动单元,通过对二相混合式步进电机的控制调节储液瓶的高低,从而改变点滴的速度。
齐齐哈尔大学杨欣宇和刘正亮,对系统如何实现自动检测、自动调节等功能做了详细的分析与研究,利用光电传感器采集点滴的速度变化信号,用AT89C5 1作为中央处理器进行信号分析与处理,通过步进电机进行控制。
随着信息技术的发展和微电子技术的应用,在医疗卫生领域一场随之而来的信息化的变革也正在进行。静脉输液是临床中一种普遍使用的医疗手段,在一些大医院一个护士常常需要负责十几个、甚至几十个床位的液体点滴,很容易出现混乱的局面,导致工作效率降低。在传统输液中,易发生一些异常情况,如管路堵塞,滴速异常及输液完毕无提示等,如果异常情况不能及时被发现,就会给病人造成伤害,严重的还会造成医疗事故。同时,有些病人,外界不便多次接触进行管理,例如以前的非典型肺炎,或者骨髓移植后的隔离,这些病人需要输液,须避免过多与外界接触,进行管理的最佳方式为远程医疗器械的控制。所以,为了提高医院本身的管理水平和工作效率,实现自动实时地监控液体点滴,微机化自动实时的液体点滴监控系统的使用势在必行。
[9]史杰.基于无线电通信的液体点滴控制系统[J].电子科学,2008
[10]韩秀莉,姜学思.智能化的液体点滴控制装置[J].大众科技,2010
[11]宋雪丽,王虎林,万金领.基于单片机系统的液体点滴速度监控装置的设计[J].电脑开发与应用,2007
[12]SIMATIC S7-200 Programmable Controller System Manual[M]
中国矿业大学藤春阳和孙长江,以AT89S52单片机为核心,以键盘及红外对射式传感器作为输入系统,以1602液晶显示屏及电动机作为输出系统的智能化输液控制及检测系统。该系统主要由水滴速度测试系统、水速控制系统、显示装置、单片机系统、无线传输系统、键盘和报警等系统组成。
黑龙江农业经济职业学院史杰,在同一系统内,MCS2051系列两单片机之间采用单向并行通信接口、主从双向并行通信接口、无主从双向并行通信操作实现双机互连的方法,实现液体点滴控制,并用PTR2000实现单片机无线发射接受模块了新的途径。
山东大学计算机科学与技术学院韩秀莉和姜学思,针对目前现代医院液体点滴自动化装置的各种缺陷和不足,设计一种智能输液监控系统,采用AT89C58单片机作为主从机的核心,利用MAX232进行远程数据信息的传输,构成了一个分布式的主从局域控制网,采用光电传感原理实现对液体点滴速度的测量和检测,用步进电动机拖动控制储液瓶的高度,实现点滴速度的自动调节,并把液体点滴的速度准确的显示在液晶显示屏上,医护人员和病人一目了然,使点滴输液变的更加方便和安全。
脉动静脉输液是临床医学中一个重要的医疗手段,目前大小医院中所使用的静脉输液器都是悬挂在病人的上首才能输液,输液速度难以准确监制,这使对输液速度要求比较严格的病人不能很好的治疗,并且输液监控报警器笨重、体积大、价格高,增加了医院的费用。所以针对目前医疗过程中存在的问题,如果有液体点滴速度监控装置,可以智能监控液体点滴,对液体滴速进行实时监控,通过构建合理的通信协议,实现主站与从站之间的可靠通信,并且系统价格低廉,可靠性高,可以克服管理复杂工作效率低等缺点,必将深受医务人员和病人的欢迎。
本课题研究了液体点滴速度监控装置,主要通过单片机控制步进电机完成对滴速的调整,可以实现对多床位进行远程、集中、分床监测,针对不同病人所需不同的液滴速度自动控制点滴速度,并在输液结束及出现异常情况时发出警告。护士可在护士室监控16输液瓶病人的输液情况,从而减轻护士的工作量,实现医院护理自动化。
调研(社会调查)情况:
山东轻工业学院宋雪丽和王虎林利用单片机设计一个智能化的液体点滴速度监测与控制系统。该系统由水滴速度测试系统、水速控制系统、显示装置、单片机系统、键盘和报警等系统组成。应用水的压强随着高度差的变化而变化的原理,利用控制步进电动机的升降来控制点滴速度。点滴速度可用键盘来设定,同时在水到达警戒线(2cm~3cm )以下时能发出报警信号。
参考文献:
[1]张金美.基Biblioteka 51单片机的液体点滴速度监控装置[J].科技信息,2003
[2]张江伟,夏淑丽.液体点滴速度监控装置[J].技术在线,2010.27
[3]杨欣宇.基于AT89C51的液体点滴速度监控系统的设计与实现[J].齐齐哈尔大学学报,2005.03
[4]王梦蛟.智能液体点滴监控系统的研究与设计[J].集成电路应用,2009
中国矿业大学王梦蛟,针对目前医疗过程中存在的问题,研制了智能液体点滴监测系统。系统采用红外对射对储液高度及点滴速度进行监测。通过构建合理的通信协议,实现了主站与从站之间的可靠通信。
兰州交通大学王瑞峰和严天峰,研制了以PC机为中心构成分布式测控系统的监控仪,全部采用菜单式管理,界面友好清晰,以全中文的形式设定参数,自动调节和监测输液速度、点滴时间;所有的输液参数通过通信线路传输到从站,并实时监测32个从站的输液情况,实现自动和人工全方位的定点和巡回检测,可很好地应用于临床。
[5]王紫婷,王瑞峰.智能液体点滴速度监控仪[J].自动化与仪器表,2004.05
[6]李云胜.基于VC的液体点滴实时监控系统的设计[J].计算机应用,2003.12
[7]杨秀娟.液体点滴速度监控装置[J].信息科技,2011
[8]滕春阳,孙长江.基于单片机系统的液体点滴速度监控装置的设计[J].技术应用,2011.08
[13]DENVIR D J, CONROY E. Electron Multiplying CCDs[Z]. Proc. SPIE, 2003, 4877: 55~68
[14]JERRAM P, POOL P, BELL R, et al. The LLLCCD: Low Light Imaging without the need for an intensifier[Z].Proc. SPIE, 2001, 4306: 178~186
目前国内外的学者针对这方面开展了很多研究,采用了很多方法。
淮安信息职业技术学院张金美,利用单片机设计并制作了一个智能化的液体点滴速度监测与控制装置。该装置由水滴速度测试系统、水速控制系统、显示装置、单片机系统、键盘和报警等系统组成。应用水的压强随着高度差的变化而变化的原理,利用控制步进电动机的升降来控制点滴速度。点滴速度可用键盘来设定,设定范围20~150(滴/分),控制误差范围在10% 1滴左右。从改变设定值起到点滴速度基本稳定整个过程的调整时间小于3分钟。同时在水到达警戒线以下时能发出报警信号。
电子信息工程学院
毕业设计开题报告
题 目:液体点滴速度监控装置—从站的设计
学 院:电子信息工程学院
专 业:
学生姓名:
学 号:
指导教师:
开题时间:
本课题研究的意义:
20世纪90年代,电子技术的迅猛发展,特别是传感器和大规模集成电路的发展,推动了现代化电子产品在社会各个领域的发展,并且对社会生产力的发展和社会信息化程度起到了促进作用,同时也使现代化电子产品性能进一步提高。生产生活的自动化程度越来越高,自动化控制的程度越来越高,功能越来越人性化,这些自动化的产品已经渗透到生产生活的每个方面。
(6)液位低警报模块设计
采用液滴计数法,一定量(以毫升为计量单位)的药液其输液量与药滴数有关,一般来说从莫非管式滴管滴落的每一滴为1/20毫升,或者是每20滴液滴总计一毫升。因此只要能检测液滴滴数,即可检测到药液的输入量。这种技术由于操作方便、价格便宜,且可靠性,实用性好它已经得到了大量的使用。
研究计划:
西安大学李云胜,利用Visual C++6.0语言的可视化和MSComm通信控件来实现微机化实时监控多套医用液体点滴装置,提出了监控系统的硬件设计和软件设计,并详细分析了监控系统的结构及功能。
山西霍州煤电集团有限责任公司杨秀娟,设计了一个液体点滴速度监控装置,实现了键盘输入、液晶显示、滴液检测、滴速控制、声光报警的功能。
[15]Kosko B.Neural Networks and Fuzzy Systems[M]
[16] Narendra K S,parthasarathy K.Indentification and Control for Dynamic Systems Using Neural Networks[J]
2012年04月05日—2012年05月08日 制作实物,撰写毕业论文
2012年05月09日学院进行毕业设计中期检查,交译文
2012年05月10日—2012年05月29日 检查修改毕业论文
2012年05月30日交毕业设计论文,学院集中审阅
2012年06月11日—2012年06月15日学生毕业答辩
文献综述:
2009年09月,惠州翔晶电子有限公司,针对医疗异常情况研发出一套“医用输液监控器”,适用于病房、护士站对病人正使用输液的状态进行实时的监控及警报,护士先手动调好液滴速度,然后打开装置,当液滴速度变得太慢(低于20%)速度变得太快(高于10%)及出现输液管堵塞、输液即将完毕时发出警报。